Be all you can be. Being location enabled or “hyper local” isn’t enough. Mobile applications are also trying to increase discoverability, push into Group-On couponing territory, and proactively deliver more relevant recommendations to users. Loopt announced limited-time and perishable inventory deals to users within proximity. Google has introduced an “open now” filter to local mobile search to find nearby businesses that are open. Not content to focused on their core check-in business (“I am the proud mayor of Barney’s Beanery”), foursquare is now recommending places near you, based on previous check-in activities, user profiles, and what your friends like. On the foursquare blog, Dennis Crowley suggests “You’ll be surprised by what you get when searching for really specific things, like ‘’80s music,’ ‘fireplaces,’ ‘pancakes,’ ‘bratwurst,’ and ‘romantic’.” Evenings with Crowley must be, well, surprising. Very.
Mass geo shopping. It is large-scale and geo-specific and, most interestingly, it comes from a carrier. AT&T and Placecast together launched ShopAlerts. AT&T subscribers can opt in and receive offers, rewards, and coupons based on each individual’s geolocation. AT&T will create geofences (virtual geographic perimeters) around retailers, events, or geographic areas to optimize relevancy. This isn’t so different than what some of the location-enabled social network applications (Booyah!, foursquare, Loopt) are doing, but it is significant because of the scale and reach that a carrier brings.
Making money? Ever since Google offered free mobile navigation and others app providers followed suit, content providers have struggled to find ways to monetize their applications. Many have looked to mobile advertising for revenue. But mobile advertising hasn’t developed quite as fast as many predicted, although it is still a growing and big market. Apple’s iAD mobile advertising efforts have been a disappointment. Industry insiders say iAD fill rates have fallen to less than 10 percent and Apple has halved its minimum advertising purchase to $500,000.
In-app money tree. Transactions that occur within an application are making big money for application developers. For both free and premium apps, in-app transactions now equal 49 percent of iPhone developer income and 29 percent of iPad revenue, according to analytics firm Disitmo. This is useful for the person who may buy a navigation app and wants to upgrade to real-time traffic. Now users don’t need to be referred outside the application to a website to make the transaction. Apple and Google both recently announced in-app subscription platforms. Apple has created a firestorm by demanding 30 percent of in-app subscription fees. Google takes 10 percent.
How much for the sword? It is jaw dropping. In-app purchases of virtual goods is overtaking advertising in top categories on the Apple platform. Flurry Analytics reports that in certain Apple app categories, “During 2010 revenue increasingly shifts from advertising to virtual goods sales until reaching a proportion of more than 80 percent from virtual goods.” You may be asking, ‘What is a virtual good?’ A gamer may want a virtual lightsaber, mansion, or respect points to enhance the game experience. My advice is to spend the wad on respect points.
By a smidge, the winner is… Android took over RIM’s long-time run as king of smartphones. Devices that run Google’s Android operating system have taken the lead in the U.S., according to new data from The Nielsen Company. Now Android is the front runner in the U.S. smartphone market with 29 percent share, with Apple’s iOS and Rim’s BlackBerry both at 27 percent. Windows lags at 10 percent, but watch Android’s lead fatten. The much-anticipated Verizon iPhone hasn’t had the impact on Apple sales once imagined. Nielsen also reports that subscribers between the ages of 25 and 34 account for 27 percent of all U.S. smartphone users across all platforms.
Threat to GPS. You may be following the very serious interference issue that threatens the GPS signal. LightSquared is developing high wireless bandwidth capabilities (4G-LTE) for wireless operators. LightSquared received an unnervingly fast-tracked FCC conditional waiver that permits it to broadcast a new terrestrial broadband service from 1,500-watt terrestrial transmitters. This will be in the portion of the L Band that is immediately adjacent to the band used by GPS. The FCC waiver was required as LightSquared’s FCC license only extended to dual-mode phones, but LightSquared wants to offer the option of terrestrial-only, hence the waiver. According to industry experts, the LightSquared terrestrial broadband signal is about 1 billion times the received power of the GPS signal on Earth. This may result in wide-scale GPS interference and jamming worldwide. As a result of ensuing uproar, a working group conducted by LightSquared and the U.S GPS Industry Council was formed to study the issue.
Upward bound. FCC chairman Julius Genachowski has had his hands full in the fight of network neutrality and the creation of a national broadband plan. Now there are rumors, not quiet ones either, that he may be nominated by President Obama to be the next Secretary of Commerce.
The recent Mobile World Congress in Barcelona had a record 60,000 attendees. Many industry companies were either exhibiting or attending to kick tires to see how the international location-based services market is faring. Industry observers are saying the focus of the trade show has gone from European-centric markets to a broader view, particularly as new technology and standards evolve and mature.
The recent Mobile World Congress in Barcelona proved that the market for location-based services is on a worldwide stage — and not sequestered to certain regions. Clay Babcock, Rand McNally director of advanced navigation technology, says the Mountain World Congress traditionally focused on European markets.
“The MWC, and the 3GSM show that preceded it, were primarily European affairs that highlighted the latest hardware in the GSM world. While the shining stars came from places like Espoo, Finland, and Stockholm Sweden, even the second-tier players were European, with Bosch, Siemens, Alcetel, Sendo, and Phillips all making phones for the growing market,” he said. “For the most part, the North American and Asian players sat on the sidelines. A possible exception was Motorola, who had two brief moments in the sun with their Startac and then Razr phones. Asian companies seemed content to make phones for the proprietary Japanese and Korean markets.”
Several technology events have changed the market—and the key part of the shift has been the dominant role that software, ecosystems, and the well-used line of ‘user experience’ now plays a major part in the world of mobile telephony, Babcock said.
“And with it, the center of the mobile world has moved to the west coast of the United States. The rise of the Apple iOS, Google Android–and now a lesser degree Microsoft WM7–has created new opportunities for many, but has also caught some big players off guard,” he said. “Nokia, for all its brilliance in making hardware, has been forced to drop its long-in-the-tooth Symbian OS in favor of WM7. This has angered many in the installed user base, but they miss the point. Nokia had to make a move, and a move to Android would have been a fatal step.”
Babcock contends that with Microsoft, Nokia at least gets an OS partner that they can look upon as equals. “That was never going to happen with Google. The state of affairs is so dire at Nokia that for the second year in a row, they failed to display at the show,” he said.
Missing at MWC is Apple, which Babcock says never comes anyway–and says that absence opened the door wide for Android. “The Android booth was a buzz of activity and excitement. Following a theme with other large booths at the show, a large section of the floor space was dedicated to partners’ applications and solutions,” he said. “The show is really all about software.”
As GPS World reported, the Nielsen Company said that Android appears to be pulling ahead of RIM Blackberry and Apple iOS in the market share battle for smartphone operating systems. But an analysis by manufacturer shows Research in Motion and Apple to be the winners compared to other device makers since they are the only ones creating and selling smartphones with their respective operating systems.
Location Just a Feature?
As for location-based services, they are maturing, becoming ubiquitous in the hardware, Babcock said. “Companies are starting to understand that location is a feature, not a business. This will affect business models that were once designed as end-user plays,” he said. “Everybody still can get paid, but maybe not by entities you first thought would pay.”
Babcock said that while the focus was on software at MWC, there was brilliant hardware on display. “The new Samsung Galaxy S II features a dual core 1-GigHz CPU and 4.3 inch super AMOLED display. Motorola, who like Sony-Ericsson is thriving after switching to Android, announced a new phone with an array of amazing accessories, one that turns the phone into a mini-laptop,” he said.
Babcock said that, even on his cab ride to the airport to return home, there was a poster for a mobile taxi application that would locate customers and dispatch a car to their location — and let them know the estimated time of arrival. “Neat, maybe not earth-shattering, but the platforms it supported were Android, iOS and Research in Motion. The new world of phone operating systems, were found in the back of a Barcelona taxi,” he said.
A number of such LBS industry companies as Navteq, ALK Technologies, deCarta and other entities had large presences or meeting rooms at MWC. Show organizers say the crowd topped out at 60,000, which was significantly higher than in 2010 or 2009. Like the Consumer Electronics Show in January, it appears that trade show attendance is up for the first time since 2008. It will be interesting to see if this trend continues for this month’s CTIA in Orlando.
Foursquare Expands Language Capability
In other MWC news, Dennis Crowley, CEO and co-founder of Foursquare, delivered a mini-keynote at the trade show about “Making Apps Smarter Through Location/Localization.” The company has made rapid expansion throughout the past year—and now has check-ins from nearly 200 countries.
Foursquare recently announced that its service is available in French, Italian, German, Spanish, and Japanese. Users can update Foursquare on their Blackberry, iPhone, or Android, to switch to the default language of the device.
In other LBS news:
TCS said that U.S. Cellular has extended its agreement to offer the company’s Your Navigator service on BREW phones. Your Navigator is an LBS application for GPS-enabled mobile phone, offering personal navigation and real-time, turn-by-turn visual and audio directions. TCS, which has worked with U.S. Cellular since 2007, signed a two-year software licensing agreement extension.
It is a significant first, an iconic moment, a big deal. You will want to remember where you were when you heard that smartphones started to outsell personal computers. According to a report by market research company IDC, consumer electronics makers shipped 100.9 million smartphones worldwide in the last three months of 2010, an 87 percent jump from a year earlier. PC shipments didn’t do as well, edging up just three percent to 92.1 million. The falling prices of smartphones have contributed to this trend. The numbers are skewed by the longer life of a computer compared to a smartphone, which frequently is replaced within two years. For many of us, one doesn’t supplant the need for the other.
Are car companies and content providers allowed to wed? At the Navigation Strategies, USA, conference, it was a striking new world with the automotive industry anxious to engage with application providers. Some of the interesting tweetable snippets from leading automotive and content providers:
“There is a three year development cycle with automotive. But now you can integrate an app into a vehicle in four weeks.”
“Maps used to an end onto itself, but now it is a way to organize information.”
“People will pay for connectivity in the vehicle, but may only be willing to pay during the time when it is needed.”
“People will pay for traffic, but you need to educate them on what it has done for them. This month you saved x money in gas, this amount of time navigating around traffic.”
“No one needs a map for their commute. They need their alarm clock to wake them early when their commute route is congested.”
“Content providers can only avoid the ‘free monster’ with value added services.”
“Navigation is now about smartphones and how to integrate with the car.”
Augment my reality. I’m not the only one charmed by Wikitude (no, not WikiLeaks) from Austrian-based Mobilizy. I took a walk around a hotel parking lot with Wikitude’s Philipp Breuss-Schneeweis imagining the possibilities of Wikitude Drive, augmented-reality navigation for vehicles or pedestrians. Intended as a heads-up display, it is currently shown as a smartphone mounted on a dashboard that displays the scene ahead of you, exactly as you see it with your eyes. However, the navigation route is drawn on top of the real scene. There is an option, particularly important at night, to switch out of augmented reality to see the route as a street map. Wikitude Drive was the grand prize winner of the 2010 NAVTEQ Global LBS Challenge. World Browser, another product by Wikitude, identifies objects around you. Point your phone and it will (try to) identify your surroundings, such as landmarks, mountains, or buildings.
Location-based social networks. I recently hosted a webinar on location-based social networks (LBSN). It is a hot topic: I had registrants from 42 countries. LBSNs are mobile apps based on developing a social community that broadcasts a user’s location and other content. LBSNs have an element of gaming that fuels and rewards usage, helps people find their friends or make new friends that share the same interest and proximity, and often provide offers and coupons from brands. A hallmark of many of these applications are check-ins, which is a manual or automated process of letting one’s community know one’s location: “I’m at Frankie’s Pizza.” There are too many LBSNs to list, but they include Booyah!, Whrrl, foursquare, Gowalla, SCVNGR. If you are interested, the webinar is available for download.
My webinar guests were Brian Cho of Booyah!, maker of MyTown, and Chad Reed of Pelago, maker of Whrrl. MyTown is an LBSN game that proves the concept with 3.7 million users. Sessions average 55 minutes a day and at its peak had 1.1 million daily sessions. Advertisers drop items into the game that may depend on the player’s location and sometimes a clue cannot be unlocked without a visit to a retail location. MyTown drove more than 800,000 visits to H&M, a clothing retailer.
Wirrl focuses on building affinity societies, and currently has 5,000 special interest societies, such as mountain biking, the Red Bull Society, and Mexican food lovers. Society members make recommendations to other members of their affinity group and a sophisticated algorithm builds up individual preferences. Whrrl’s revenue comes from brands that offer contests and prizes that match society members’ interests and locations. Reed says they use contests, instead of coupons or offers, to allow brands to control costs and add excitement.
Making money. I’m often asked for advice from content providers on making money when consumers are increasingly expecting applications to be free, and some applications, such as navigation or mapping, are getting dangerously close to becoming a utility. One strategy is to add value in a way that is challenging for other companies to cookie cut. An example is Navx, a company based in Paris that provides fuel prices for up to 100,000 gas stations with hourly updates. Consolidating the data isn’t a fully automated process so it is unlikely that companies like Google, or the like, will want to get their hands dirty. Navx also identifies parking spaces, speed traps, and charging stations for electric vehicles.
Probe sharing. Adding live connectivity to enable traffic and other services is critical for personal navigation device (PND) providers that are competing for market with smartphones. The recently announced TomTom GO 2505 is stepping up with improved traffic (updated every two minutes) from probe and traditional sources, as well as local search, fuel prices, and weather. TomTom is anxious to get its users hooked and is providing a 12-month trial subscription out of the box. Part of the traffic data set is provided by its own users, and Tom Murray of TomTom reports that more than 90 percent of its customers opt-in to contribute the data.
The World Mobile Conference is under way. It’s looking like it is all about smartphones and tablets. More later.
Sometimes a market niche appears to be heading toward better things — even if the economy is not. This year’s Transportation Research Board’s Annual Meeting had its highest attendance ever. While intelligent transportation systems meetings have been shunned in the last few years as being too government-focused, some forward-thinking companies are using the Washington, D.C.-based meeting as a springboard for their enterprise location-based services offerings.
WASHINGTON — While enterprise and government markets are not as sexy as traditional friend-finding location-based services, a lot can be said about companies trying to make inroads in this developing marketplace. At the recent Transportation Research Board Annual Meeting here, such companies as TomTom are leveraging its community input options from its consumer navigation devices and map-building to government and enterprise markets.
While saying the portable navigation device will endure for a long time — and will never disappear — Maarten van Gool, TomTom’s Licensing Business Unit managing director, said that the company is looking at providing navigation and location products on multiple platforms. “For decades, we have delivered location and map content to the government and enterprise markets and we work with such companies as ESRI and Pitney Bowes Business Insight and federal, state, and local government agencies,” he said.
Van Gool said that government experts and policy-makers need detailed and reliable decision-making support tools to make timely and cost-effective decisions on changes to their local traffic management programs. “The intelligent transportation systems market can benefit from accurate and comprehensive information about travel times, traffic speeds, local accessibility, and travel patterns, which are the basic building blocks for forming cohesive traffic management plans,” he said.
Also at TRB last month, TomTom announced a partnership with PTV where PTV will be able to deliver TomTom traffic content, via TomTom Traffic Stats, to its customers in the transportation sector. “We are really only at the beginning of what we can offer and we look forward to delivering additional products for the government and enterprise markets based upon our vast historical traffic database and real-time traffic capabilities; these will become available over the course of 2011,” van Gool said. “The total [government] market size is yet to be quantified, and as the technology innovation in this space expands, we are on track to support it. We believe we can revolutionize traffic information by utilizing our assets and capabilities and we are working to educate the market before its full potential is reached.”
In other TomTom news, if you haven’t seen it already, it looks as if the company is phasing out the Tele Atlas name at trade shows. Most company personnel are now wearing TomTom badges during this transition.
In one of the big TRB announcements, the U.S. Department of Transportation’s Research and Innovative Technology Administration announced the Connected Vehicle Technology Challenge. The new competition seeks industry ideas for using wireless connectivity between vehicles.
RITA, through the competition, is soliciting ideas for products or applications that use dedicated short-range communications, which will be the basis for a future system of connected vehicles that will communicate with each other as well as the surrounding infrastructure, such as traffic signals, work zones and toll booths.
According to a National Highway Traffic Safety Administration report, wireless vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications can potentially address 81 percent of all unimpaired vehicle crashes. Selected prize recipients will be fully funded to present their ideas for connected vehicle technology.
The competition, which runs through May 1, is open to all companies, not just those involved in transportation. More information can be found at www.challenge.gov.
Qualcomm Makes LBS News with Neer
Concentrating on privacy as a market driver, Neer, which is a subsidiary of Qualcomm Services Labs, allows a users to determine where, when, and who their location information is sent to. The company says applications include not only allowing family members to know where a loved one is, but business users to schedule information to co-workers.
Privacy is what Neer, which had a strong presence in the Qualcomm booth at last month’s Consumer Electronics Show, hopes separates it from the Foursquare, Gowalla, Twitter, and Facebook Places of the world.
“First and foremost, Neer was not designed to broadcast your location to vast numbers of people. Instead, Neer allows you to selectively choose the people, places, and times you are comfortable sharing your location,” said Ian Heidt, Neer director of services strategy. “And because we enable private sharing only with those you are most close to, we have seen growing acceptance of sharing places such as one’s home or work, places that have typically been taboo in other apps. We also wanted Neer to fit in more naturally with how people behave, so Neer works simply, securely, and automatically — there is no need to ‘check in’ like other apps. And because we believe that people want to keep this information securely within their control, there are no means to share location outside Neer.”
Right now, Heidt said that Neer is free, with no charges or advertising. “In the future, we may explore ways of including relevant ads, but for now, it is totally free on both Android and iPhone,” he said. “We are looking into numerous ways that we can monetize Neer by connecting people to the places they go. But in all cases, our primary goal is to preserve the trust that Neer is both helpful to your day and under your control.”
Using the Augmentation System with GPS-Equipped Mobile Phones
By François Boullete, Boris Kennes, Michaël Mastier, and Lee Banfield
GPS corrections from the European Geostationary Navigation Overlay Service can improve the positioning accuracy and user experience of GPS-enabled mobile phones, even if EGNOS satellites are not visible and even when the GNSS chipset in the phone does not support satellite-based augmentation systems.
Today, more than 20 percent of mobile phones in use in Europe include a GNSS chipset, and the penetration is expected to exceed 50 percent in the next 5 years. Despite its success in other sectors such as agriculture since the launch of its Open Service in October 2009,
EGNOS has received limited adoption in location-based services (LBS) and consumer applications, due to two main obstacles. First, the signals from the three EGNOS geostationary satellites that are easily received in open-sky environments are difficult to receive in cities, due to masking by buildings. Second, most GNSS chipsets embedded in today’s mobile phones are GPS-only without SBAS support, or use SBAS for ranging only, a function not supported by EGNOS at this stage.
The European GNSS Agency (GSA) and the European Commission (EC) supported the work described here to provide mobile phone operating system and application developers with a library of functions to allow them to benefit from EGNOS in all their applications. It works by receiving correction data via mobile communication networks when EGNOS satellites are not visible to the user device and even when using a standard GPS chipset, overcoming these two main obstacles for adoption.
Targeted mobile operating systems now include Nokia Maemo, Google Android, and Microsoft WinMobile. Further work will extend to this list to other compatible platforms.
This article demonstrates the feasibility and shows the performance of a software-based EGNOS solution and seeks to create awareness among mobile operating system and application developers on EGNOS.
User Benefits and Constraints
Although the sources of GPS positioning errors in urban areas are mainly due to multipath and GPS satellites availability, SBAS corrections on GPS satellites clocks and orbits and ionospheric correction model can still add value in case of moderate multipath environment characteristics. Although GPS stand-alone accuracy is nowadays generally sufficient, it is expected to degrade in the next couple of years as solar activity increases. Availability of free EGNOS corrections delivered via the mobile communication network will help maintain accuracy during these high solar activity periods.
The limited visibility of EGNOS satellites in urban areas requires the use of the mobile communication network to retrieve the EGNOS corrections. This can be perceived at the first sight as a drawback to the proposed solution as it involves communication costs. However, the required bandwidth is negligible compared to today’s mobile applications such as music and video streaming; further, mobile operators increasingly offer smartphones with unlimited data-access packages.
Implementation Overview
Implementation of EGNOS in current-generation mobile phones requires the introduction of a new library of functions at the software level that will allow application developers to get the best possible accuracy in their application regardless of the underlying algorithms used for position calculation. Such a library of functions can eventually be integrated directly in the application programming interface (API) of the phone operation system. At this point, application developers will simply request a position using the API, and the API will return the EGNOS improved position.
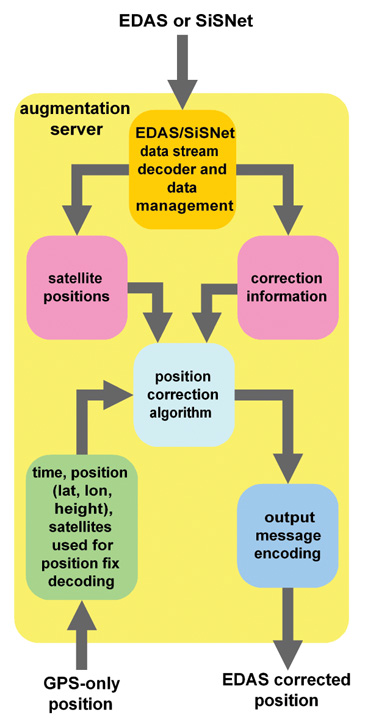
The main computations performed by this EGNOS library (see Figure 1) can be summarized as:
Reception: the GPS user position, satellites used, and their elevations and azimuths in NMEA format are requested to the phone’s GPS chipset, and the EGNOS correction message and Klobuchar ionospheric model parameters are received from a distant server (for example, EGNOS Data Access Service EDAS) using the communication link available at the mobile phone;
Preparation: collected input data are decoded and prepared for next step;
Calculation: the new position corrected by EGNOS is calculated by re-creating the line-of-sight or design matrix (using user position and satellite geometry), applying the EGNOS fast, long-term (including clock), and ionospheric corrections (included in the EGNOS message) and subtracting the Klobuchar ionospheric correction that was (assumed to be) applied at chipset level;
Output: the EGNOS corrected position is encoded in NMEA format and returned to the application.
Figure 1. Overview of EGNOS library implementation.
Data Access via the Internet
The EGNOS correction message and Klobuchar ionospheric model parameters are requested by the mobile phone to a distant server. Although the parameters and ephemeris data are stored on the phone’s GPS chipset once it has decoded the messages from GPS satellites, this data is not made available to other phone applications, hence the need to recover it from a remote source. Today, two alternative servers are available: the EGNOS Data Access Server (EDAS) developed by the EC and Signal-in-Space through the Internet (SISNeT) developed by the European Space Agency (ESA).
SISNeT’s advantage is the simplicity of the message (hundreds of bits per second) and the availability of specific functions that allow requesting all the necessary data for our application. However, SISNeT messages are produced from EGNOS signals in space, not from the ground segment: an EGNOS receiver installed at ESA’s ESTEC center receives the signals, demodulates them, extracts the correction message, and re-broadcasts it via the Internet. The reliability and availability of this approach depend upon the good reception of EGNOS signals at this site. Interference or EGNOS broadcast failure could disrupt service.
Unlike SISNeT, EDAS takes the EGNOS correction message directly from the EGNOS system, which guarantees higher service reliability and availability. Nevertheless, the EDAS message is complex and contains much more than the data required for the present application (hundreds of kilobits per second). Therefore a direct connection to EDAS would be inadequate. As a result an EDAS proxy needs to be interfaced between the EDAS server and the mobile platform in order to filter the data flow and extract only the required data. This proxy provides the same kind of messages and functions as SISNeT, whose specifications are ideal for such an application, however it is using data directly from the EGNOS system and not from EGNOS signals in space, improving reliability. In addition, planned EDAS improvements include the provision of such a simplified service directly from the server, removing the need for a proxy.
Independently of the data server used, the mobile platform must retrieve the EGNOS correction messages, and the Klobuchar ionospheric model parameters. The correction message is composed of a number of different message types (MT) as defined in the SBAS standard established by the International Civil Aviation Organization. For our application, the most important messages are:
MT1, the PRN mask that shows to which satellites (PRN) the data contained in the other, subsequent messages are related;
MT2-5, containing data to correct rapid variations in the ephemeris and clock errors of the GPS satellites. The important bits for us in these messages are the fast corrections for each satellite used to calculate the user position;
MT25, with data to correct long-term vari
ations in the ephemeris errors and clock errors of the GPS satellites;
MT18, the ionospheric grid points (IGP) mask that associates ionospheric corrections in MT26 with the IGPs to which they relate;
MT26, providing data to compute the ionospheric corrections for the IGPs present in the IGP mask. In particular it contains the grid ionospheric vertical delay.
The eight Klobuchar ionospheric model parameters must also be obtained from the distant server (using, for example, the GPS_IONO request with SISNeT).
Corrections from GNSS Chipset
The correction algorithm on the phone takes the original position provided by GNSS chipset and identifies the GPS satellite measurements which were used in this computation. It then determines a pseudorange correction for each of the GPS satellites used, and using knowledge of the user-satellite geometry, translates these to a combined position-domain correction.
Most mobile phones’ operating systems allow access to the NMEA sentences from the GNSS chipset using native API functions, for example, onNmeaReceived() with Google’s Android. In order to apply the EGNOS correction algorithms developed in this paper, the minimum required NMEA sentences are GGA, GSA, and GSV.
To construct pseudorange corrections, the Design matrix containing of line-of-sight vectors to the satellites is reconstructed using the elevation and azimuth data. All EGNOS corrections for the satellite orbit and clock errors and the ionospheric delay are applied in this range domain. The algorithm assumes that the Klobuchar model will have been applied to correct for the ionospheric delay in the original GNSS chipset positioning solution. Therefore it provides an adjustment to this original correction to exploit the greater accuracy of the EGNOS ionospheric data. Finally these range corrections are propagated into the position domain using the Design matrix. This provides a 3-dimensional position shift to apply to the original chipset position.
Implementation with Google’s Android
To obtain NMEA strings from an Android phone requires the ‘onNmeaReceived’ function, a function of the LocationManager class. The LocationManager uses the function ‘requestLocationUpdates’ to get a continuous update of the position input, which in this case is GPS. To implement the LocationManager, a LocationListener must be implemented either by the current activity or as a variable. The ‘onNmeaRecieved’ function will be called every second from the instant the Android’s GPS is switched on. The function provides the NMEA strings with a timestamp using the phone internal clock. This timestamp is not derived from GPS and should be used only for logging.
The HTC Legend produces the $GPGSV, $GPGGA and $GPGSA messages that are needed for the application. The Legend also produces $GPRMC and $GPVTG strings. The $GPGSV provides the elevations and azimuths needed for the algorithm, the $GPGGA provides the time, original position and number of satellites in the fix and the $GPGSA provide the PRN numbers of the satellites used in the fix.
For the present testing, necessary data are received via a TCP/IP connection to the SISNeT server (the EDAS proxy server described previously can be used in exactly the same way). For a snapshot solution a continuous connection is not needed and all the information is collected via ‘GETMSG’ and ‘GPS_IONO’ calls. ‘GETMSG’ calls get the last of a specific message type going back up to 30 messages. The types 0,1,2,3,4,5,18,24 and 26 were needed to provide the information for the position domain correction matrices. Only the last message types 0,1,2,3,3,4,5 were needed with type 18 needing 4 and many more of type 24 and 26.
The ‘GPS_IONO’ message gets the current Klobuchar values. By asking for all of the specific message types, almost instantly all the information is gained without having to wait for the 3 minutes Ionospheric grid cycle (message types 18 and 26) and the variable speed, dependant on number of satellites, complete slow correction set. Once the data has been downloaded from the server the connection is closed.
A streamed input could be used with the above approach by continuing to receive data after the initial connection and not closing the connection until the application using the service requested. This would require a continuous stable connection to a high speed mobile network and a limited use of the internet from other applications. As mobile technology improves this will not be a problem but is difficult to achieve with GPRS and 3G networks at present.
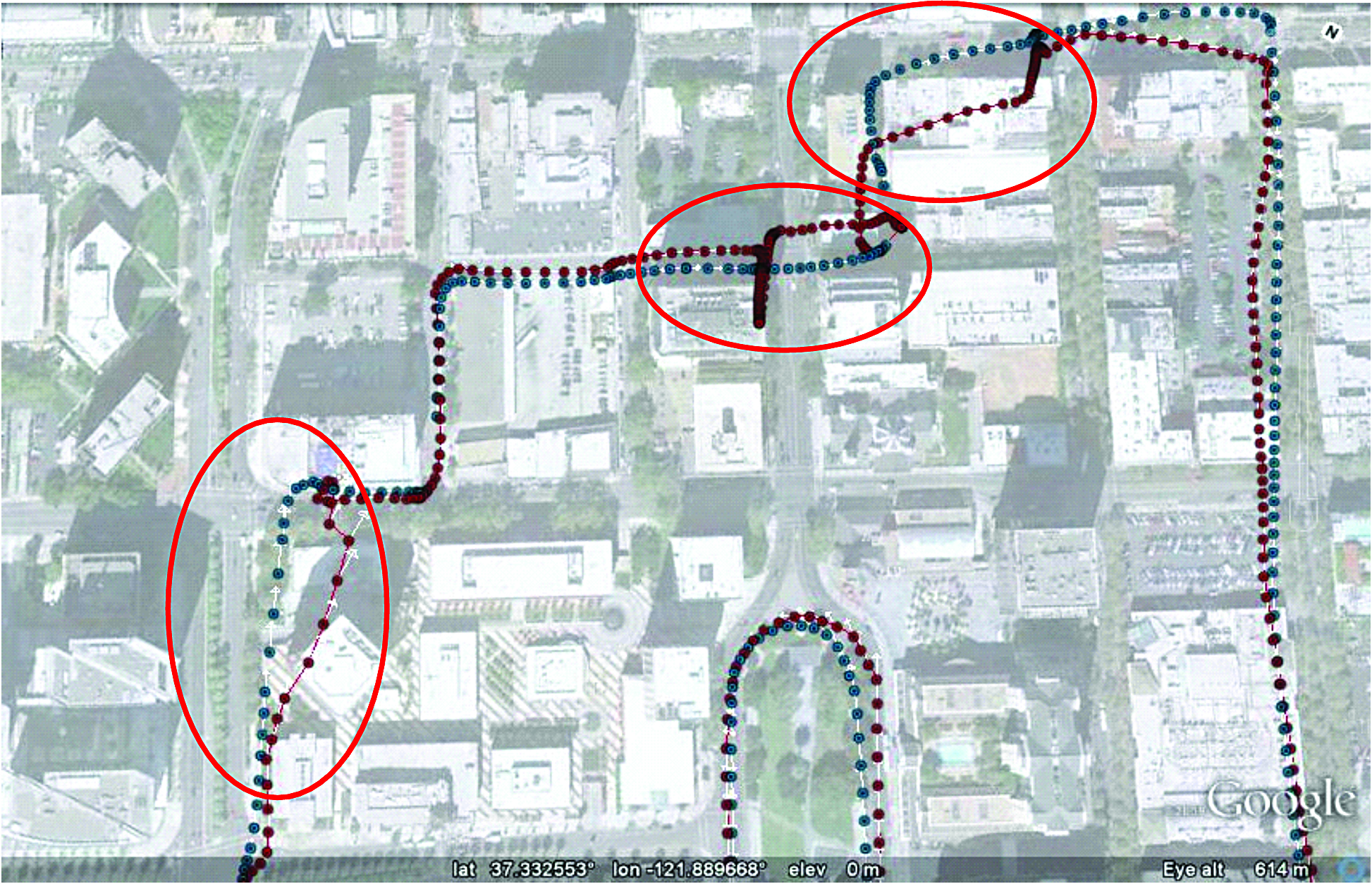
Figure 2 shows the current application running on the HTC Legend phone with corrected positions displayed alongside the original GPS positions.
Figure 2. Application running on HTC Phone.
Test Results
Before testing the implementation of the concept on a mobile platform, some initial tests were performed on an offline basis in order to assess the impact of the position correction and verify the approach. This was achieved through the use of 30s data recorded at continuously operating IGS reference stations, freely available over the internet. The data was processed using an in-house PVT engine designed to be representative of LBS implementations, in order to produce stand-alone and conventional EGNOS solutions. The algorithm described in this paper was then applied to the stand-alone solutions, after downloading EGNOS data from ESA’s EGNOS Message Server (EMS) which allows access to past broadcast messages, to produce a third set of solutions. The accuracy of each solution set was then computed based on the precise coordinates of the reference station made available by the IGS. Whilst this approach replicates the mobile phone correction algorithm it should be noted that there is less uncertainty involved in this offline approach as we can ensure that the assumptions made regarding the original PVT solution are valid. We must assume that the phone chipset PVT is a snapshot solution (no filtering) using the Klobuchar ionospheric model and an elevation-dependent weighting scheme.
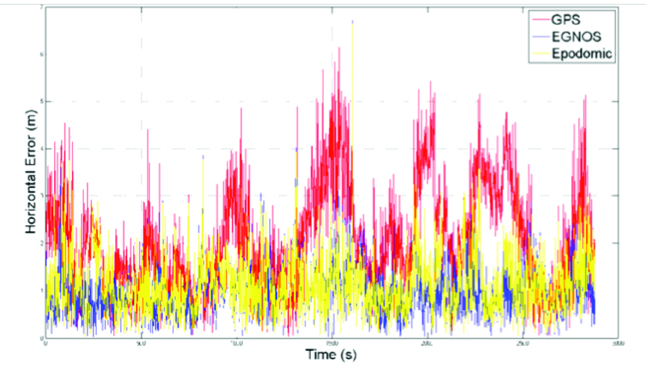
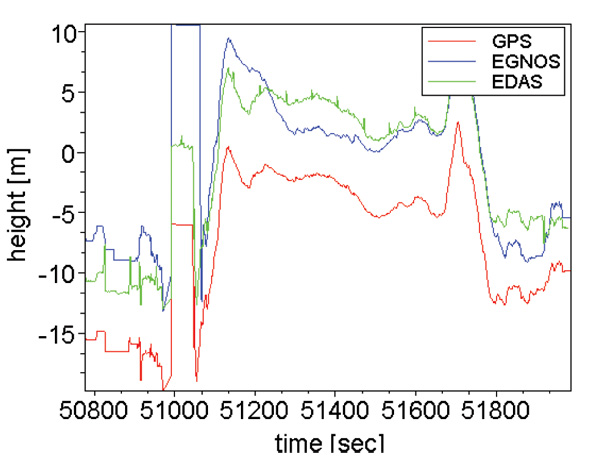
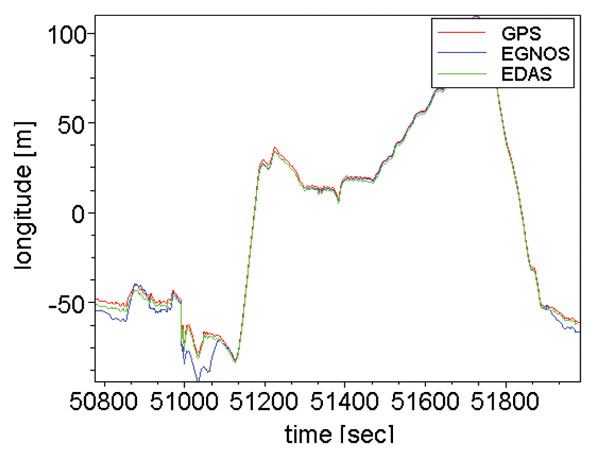
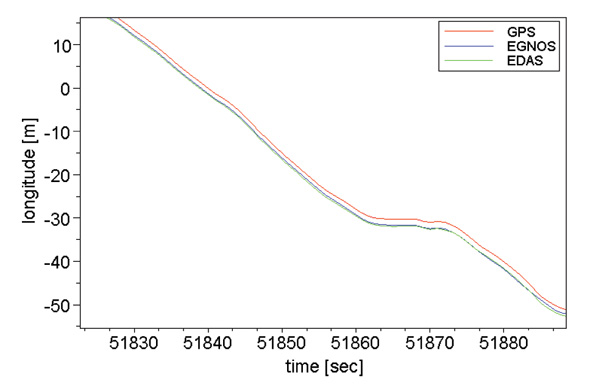
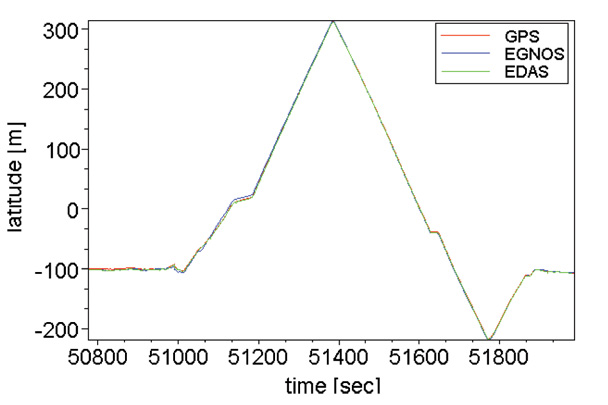
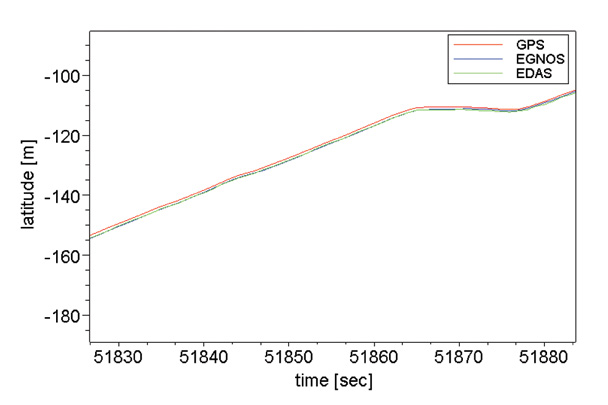
The plots from Figures 3, 4, and 5 show the errors in position estimates obtained from a 24-hour dataset recorded at the HUEG IGS station in Huegelheim, Germany on May 5, 2010. Table 1 shows the statistics associated with the figures.
Figure 3. Stand-alone GPS horizontal positioning performance over 24 hours at HUEG IGS station.Figure 4. Conventional EGNOS horizontal positioning performance over 24 hours at HUEG IGS station.Figure 5. Position domain EGNOS horizontal positioning performance over 24 hours at HUEG IGS station.TABLE 1. Horizontal positioning performance statistics from 24hr HUEG IGS station analysis.
The results demonstrate that the conventional EGNOS solution improves the horizontal positioning performance of GPS, with an improvement in the 95th percentile of around 2 meters in this example. Importantly, it can be seen that the position domain EGNOS algorithm achieves a similar level of performance to conventional EGNOS. This can be seen more clearly by comparing the instantaneous horizontal error over this period from the three alternative solutions, as shown in Figure 6. It is clear that the position-domain EGNOS correction shown in yellow reduces the horizontal error of the GPS solution (red) in a similar way to conventional EGNOS (blue).
Figure 6. Time series of horizontal positioning errors for stand-alone GPS, conventional EGNOS, and position domain EGNOS solutions at HUEG IGS station.
Similar behavior was found in other datasets tested. With the ability of the algorithm to replicate conventional EGNOS performance verified, we assessed the performance when integrated on an HTC Legend phone. The key differences here were the real-time connection to the EGNOS data server and the uncertainty in the assumptions made regarding the chipset positioning algorithm.
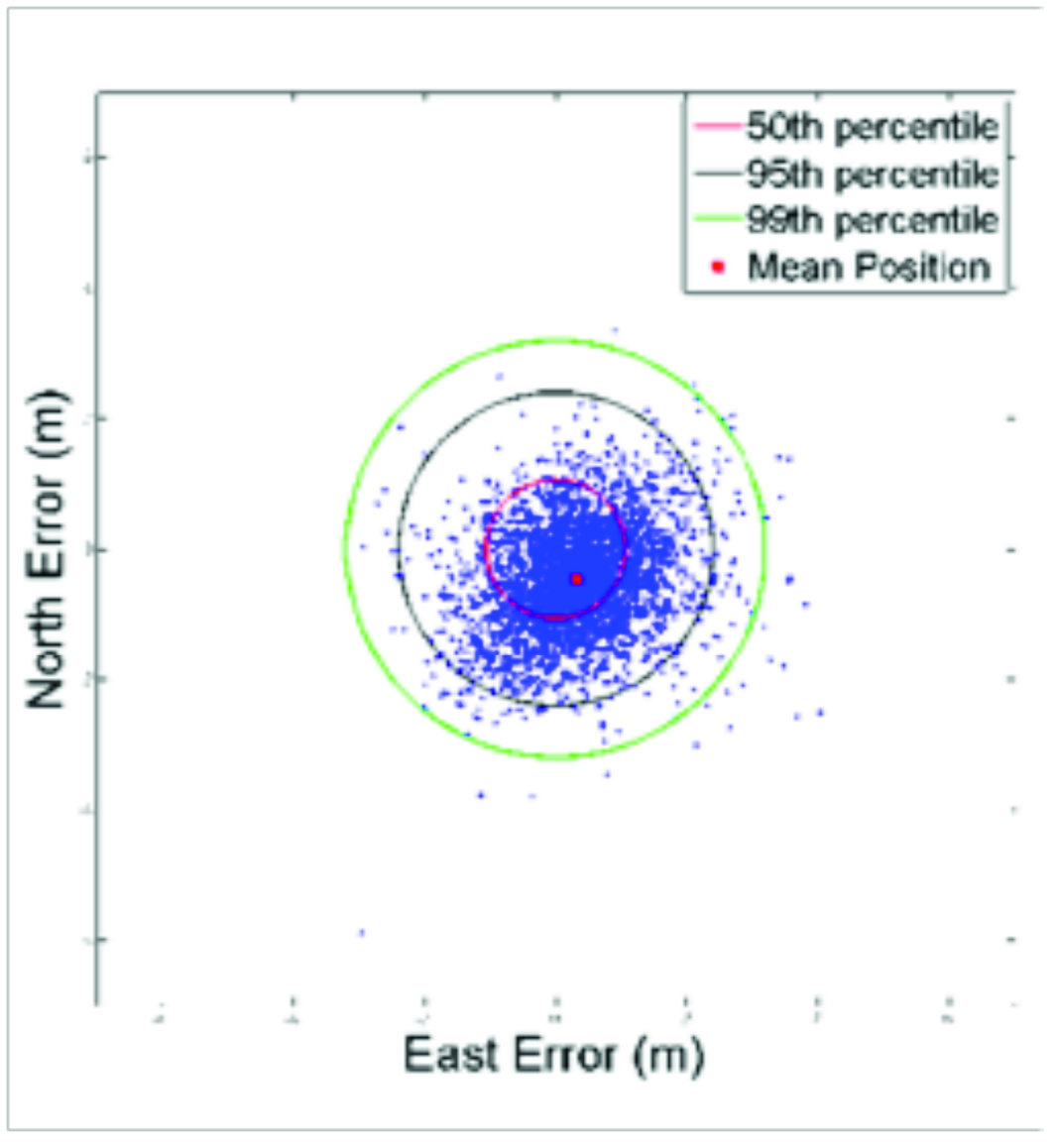
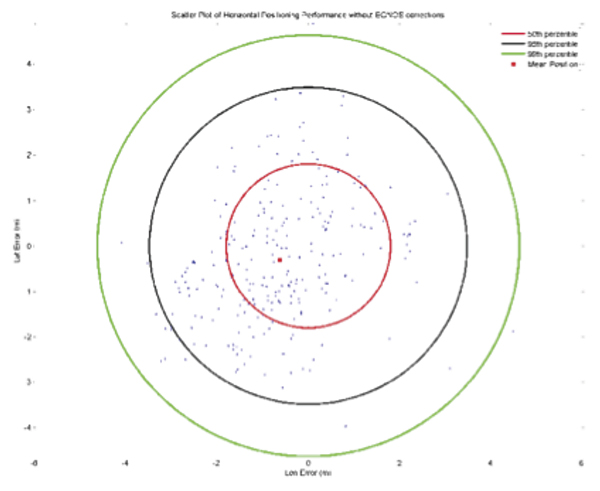
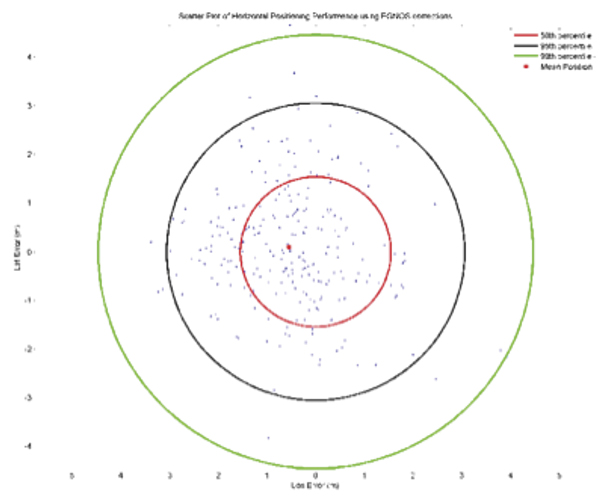
Testing began by assessing the performance of the application over a static point. Two precisely surveyed points were used for this purpose at four separate time periods. The test method simply involved holding the phone over the point (vertical accuracy was not assessed) and requesting a corrected solution from the application, along with the original GPS chipset solution. The chipset applies stand-still detection to avoid generating multiple GPS positions for a single user location which would be unnecessary in typical phone applications. To generate a sample of position estimates therefore the phone was repeatedly moved away from the reference point then returned to it over the test period. This makes the collection of very large datasets over extended periods impractical. The samples from the four test periods were combined in order to generate results with greater statistical significance. 261 samples were collected to produce the results shown in Figures 7 and 8, and the statistics in Table 2.
Figure 7. Stand-Alone GPS Horizontal Positioning Performance from online static point testing.
Figure 8. Position Domain EGNOS Horizontal Positioning Performance from online static point testing.TABLE 2. Horizontal Positioning Performance from online static point tests.
The results indicate a small improvement in horizontal accuracy as a result of the position domain EGNOS correction. The statistical significance of these results is perhaps questionable given the limitations of the test method and relative small sample size. The reduced level of improvement compared to the offline tests is thought to be due to imperfect assumptions made about the chipset positioning algorithm. The correction algorithm must make many assumptions about the way in which the original GPS position has been computed by the phone chipset. These include assumptions on the measurement weightings used, an assumption that a filtered solution is not applied, assumptions that no additional sensors or systems (accelerometers, digital compass or cellular positioning) influence the computed position, and also assumptions that all information reported in the NMEA strings is accurate. Further work seeks to determine if the algorithm can be improved to better replicate the processes applied in the initial GPS solution in order to make a more significant improvement.
The phone GPS positioning achieves similar levels of accuracy to processing single-frequency data collected at an IGS station. This level of accuracy would be more than adequate for most LBS applications in which the main requirement is to be able to reliably relate a user location to a map or imagery feature. With increasing solar activity over the next few years, leading to larger ionospheric delays on satellite signals, the performance of standard GPS solutions will degrade, making the benefits of the more accurate and timely EGNOS corrections more significant.
Conclusions and Way Forward
By a relatively simple translation method, EGNOS data may be mapped into the position domain, allowing a user position solution to be corrected for signal-in-space (satellite orbit and clock) and ionospheric errors detected and predicted by EGNOS. User position solution provided by the phone chipset may be corrected in near-real time based on data downloaded from a distant server.
The method replicates conventional EGNOS performance (corrections applied at the pseudorange level) when all assumptions regarding the stand-alone GPS user position are valid. Ongoing work seeks to determine if the correction algorithm can be enhanced to provide a greater level of improvement to GPS positions on the phone platform. Ideally, it should be able to provide improvements similar to those produced when EGNOS data is applied in a conventional manner in the position solution. Developers would need to judge the significance of any potential improvement for their intended application.
The EC has launched a project to port this EGNOS library to other mobile platforms and complement it with additional functions that are needed by the application developers and that can bring user benefits. The software library can be obtained free upon request to [email protected].
Acknowledgments
Special thanks to Nottingham Scientific Ltd. for its work on this topic and cooperation in preparing this paper. This article is based on a paper presented at ION-GNSS 2010.
François Boullete was market development officer at the European GNSS Agency at the time of this work. He holds a diploma in project management from HEC and a diploma in engineering from Ecole Centrale.
Boris Kennes is R&D and market monitoring officer at the European GNSS Agency. He has a background in engineering and strategy consulting.
Michaël Mastier is policy officer at the European Commission in the Galileo/EGNOS applications unit. He has an engineering education and diploma in public works from ENTPE in Lyon, and a computer science post-graduate diploma from Saint-Etienne University, France.
Lee Banfield is a software engineer at Nottingham Scientific Limited (NSL) in the UK. He has developed applications which use EDAS data to provide EGNOS corrections, GNSS assistance messages and GNSS performance metrics for a range of road and LBS applications.
A new method enables the mobile phone to compute its own position using acquisition assistance data with increased resolution in some of the fields. It benefits network operators as they can deliver the best performance with minimum bandwidth requirements, making this especially relevant in emergency-call situations.
By Javier de Salas and Frank van Diggelen
In assisted GPS (A-GPS) and A-GNSS, some information in the form of assistance data is sent to the mobile terminal equipped with a GNSS receiver. This data helps the receiver acquire satellite signals faster and at lower power levels as well as compute its own position. Assistance data is essential in many GNSS use cases but it is especially relevant in emergency calls from mobile terminals (e911, e112) where a fast response and the best sensitivity are required. Mobile subscribers are often in environments where direct satellite visibility is impaired because the user is inside a building or there are other obstructions. Emergency situations also require a very fast response (time-to -first-fix or TTFF), typically within 30 seconds, so the performance requirements imposed on the GNSS receiver are very stringent.
GNSS assistance data is standardized by 3GPP and 3GPP2 in two different types, broadly known as mobile-station (MS) based and MS-assisted. MS-assisted positions are computed by a server. MS-based methods enjoy certain performance benefits in position accuracy and response time when compared with MS-assisted methods. However, the amount of assistance data required for MS-based operation is substantially larger than the assistance data required by MS-assisted methods.
For this reason, some network operators choose the MS-assisted methods for their emergency-call services. Larger bandwidth requirements are of deep concern if many callers demand the services at the same time, because network capacity could be challenged when it is most needed.
This article describes a method that enables the mobile terminal to compute its own position, thus enjoying the benefits outlined above but with the same assistance data as in MS-assisted methods, only with increased resolution in some of the fields. We call this method single-shot MS-based. Network operators benefit because they can deliver the best performance with the minimum bandwidth requirements, especially relevant in emergency call situations.
Some 3GPP specifications will need to be modified slightly to increase the resolution of the relevant assistance data fields, namely, 3GPP TS 44.031, 3GPP TS 25.331, and 3GPP TS 36.355
Bandwidth versus Performance
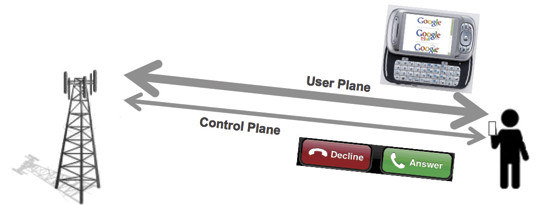
Assisted GNSS information is exchanged between the location server and the mobile device using standardized protocols. Several bodies create different specifications: 3GPP, 3GPP2, and the Open Mobile Alliance (OMA). Broadly speaking, we can say that 3GPP and 3GPP2 work on protocols that are used over control plane and OMA works on protocols that are used over user plane.
Control plane refers to the use of cellular signaling channels as the transport mechanism for the assistance data and position information. User plane refers to the use of traffic channels (see Figure 1). When you get a phone call, the control plane makes your phone ring. When you browse the web you are using the user plane.
Figure 1. Control plane is used for signaling purposes, user plane for transferring user data.
Signaling channels are not designed to transfer large amount of information, so it is important for 3GPP and 3GPP2 to make the protocols efficient and save bandwidth while maintaining the best performance. Cellular traffic channels are designed to transport much larger amounts of data and thus the bandwidth restrictions are less important than in the control plane case; OMA typically addresses richer GNSS features for Location Based Services (LBS). This is why network operators often support emergency call location using control plane, leaving the user plane for commercial applications. It is also a very good way to separate emergency traffic from LBS traffic so that the former is never compromised by lack of capacity coming from heavy use of commercial location applications.
Two different types of assisted GNSS have been standardized, known as MS-based and MS-assisted in Global System for Mobile Communicatios (GSM) and code-division multiple-access (CDMA) specifications, and as user-equipment (UE) based and UE-assisted in Wideband Code Division Multiple Access (WCDMA) specifications.
MS-assisted refers to the case where the mobile device equipped with a GNSS receiver does not compute its own position but it is instead computed in a location server in the operator’s network. Assistance data is sent to the mobile device to help acquire satellite signals faster. Remember that GNSS signal acquisition involves a three dimensional search (satellite, frequency and delay) that requires intensive signal processing. So assistance data is sent in the form of visible satellites including expected delays and expected Doppler shifts. These values are provided at a reference time and relative to an approximate location for the subscriber. The approximate location typically comes from the location of the serving cell tower. The reference time, but not the approximate location, is normally included as part of the assistance data. After a certain number of satellites are acquired, measurements are sent back to the location server for it to compute the subscriber position. GNSS measurements for each satellite include the measured delay, measured Doppler frequency and an estimation of the signal power to noise ratio. Assistance data in MS-assisted is referred to as “acquisition assistance”. It contains the minimum information so it is very efficient in bandwidth. See Table 1 for an exact bit count of the GNSS acquisition assistance. This table will be used as an example throughout this paper. In this particular example, it is assumed that assistance data is sent for 16 satellites.
MS-based refers to the case where the GNSS-enabled mobile device computes its own position locally. A different set of assistance data parameters are sent to the device to help it acquire the GNSS signals as well as calculate its own geographical location. Measurements are processed by the mobile device internal circuitry until the locally computed position is deemed accurate enough to meet the requirements received in the location request or a timeout is reached. Location information (latitude, longitude, altitude) is then sent back to the network in response to the location request. Assistance data in MS-based consists, at a minimum, of three elements: an approximate location (coming from the serving cell), an approximate time (accurate to a few seconds) and a description of the satellite orbits and clock errors referred to in the specifications as navigation model. See Table 2 for an exact bit count of the GPS assistance data in MS-based. The GNSS receiver uses the approximate location, the approximate time and the navigation model to estimate the expected delays and Doppler shifts of the visible satellite and thus proceed to the acquisition of satellite signals very much like in the MS-assisted case. Satellite measurements (code delays in the simplest implementation) and navigation model are used to calculate the receiver’s own position as explained below.
Advantages of MS-Based over MS-Assisted
We can see from Tables 1 and 2 that the amount of data used in MS-based i
s significantly larger than that of MS-assisted, in fact by a factor of seven! So why do some operators still decide to use MS-based over MS-assisted? The answer is there are noticeable performance advantages when using MS-based. An in-depth description of these advantages is out of the scope of this paper; but we will provide descriptions of what we see as the three more important ones.
Better Estimate of Position Accuracy. The first advantage lies with the fact that in MS-based mode the mobile device has a much better knowledge of the estimated accuracy of the position that it has computed internally. This was implicitly mentioned in the description of the MS-based and MS-assisted method above when we explained that in MS-assisted mode, the mobile terminal sends the measurements after a sufficient number of satellites (with certain range uncertainties) have been acquired. This is precisely the problem, what is a sufficient number of satellites? It is not easy to know for the mobile receiver because it does not know what positioning algorithm or what satellite subset the location server will use in its calculations. As such, it is more difficult to guarantee the quality of service of the position in the MS-assisted method. One could perhaps argue that the mobile receiver has an idea of the satellite geometry based on the Azimuth and Elevation fields (see Table 1) and therefore can perform a more educated estimation than just using the number of satellites and their associated uncertainties. This argument will only be valid if the mobile device knew exactly what the satellite subset is that the location server will employ in its position computation. Different satellite subsets yield different estimated accuracies. In addition to this, azimuth and elevation fields are optional in other positioning protocols such as Radio Resource Location Protocol (RRLP) and Radio Resource Control (RRC) and are also quantized with a value of 11.25 degrees, which deems them practically useless to quantify the satellite geometry in the critical cases where the dilution of precision (DOP) values are large.
Kalman Filter. The second advantage comes from the use of sophisticated navigation filters (for example, Kalman filters) by all GNSS manufacturers. In the MS-based method, the final position estimate that is sent to the network is computed using consecutive sets of measurements that help the position converge using the receiver dynamic model to smooth the resulting positions for greater accuracy. Conversely, in MS-assisted mode, the position computation engine only has access to a single set of measurements and therefore cannot employ sequential navigation filters.
Coarse-Time A-GNSS. The third advantage is perhaps the more difficult to grasp. It has to do with the fact that most (if not all) A-GNSS location servers only provide reference time information that is accurate to within a few seconds. On the other hand, for classical GNSS position computation, knowledge of absolute time accurate to a few milliseconds is required. Typically, it is the task of the GNSS receiver to decode the accurate satellite time information that comes modulated on the GNSS signals as part of the navigation message. However, in environments where satellite visibility is impaired, such as indoors, the satellite signals may be so low that the timing information cannot be decoded from the satellite due to excessive Bit Error Rate. In these situations, the absolute time can be set as an additional state that to be solved as part of the complete navigation solution therefore increasing the position yield in of the GNSS receiver in difficult environments. We refer to this technique as coarse time A-GNSS.
There is no technical reason why this technique could not be implemented in a location server in the operator’s network as opposed to the mobile device itself. However, for this technique to work properly, the mobile device should indicate to the location server whether or not it has successfully decoded the time from the satellites signals (or perhaps other sources). This is normally done by setting an associated time-uncertainty value with the time reported with the GPS measurements. There are some 3GPP specifications (for example RRC prior to R7) that do not support this parameter so they have hindered the adoption of the coarse time A-GNSS technique in MS-assisted mode.
Continuous Navigation. By delivering ephemeris data (good for several hours), MS-based techniques have an advantage over MS-assisted for continuous navigation. This advantage is not addressed further in this article, where we are focused only on first fixes.
Single-Shot MS-Based Method
We present a brief reminder of how GNSS positions are computed in order to determine what assistance data is strictly needed for a mobile terminal to compute its own location. We will use a simple least squares algorithm for simplicity but the conclusions are extensible to the cases of other positioning algorithms such as Kalman filters.
The observation equations are typically linearized around an approximate location. They can be easily presented in matrix form as:
Δ y = A Δ x
where Δ y is a column vector [m x 1] containing the difference between the predicted and measured pseudo-ranges for the m satellites measured by the GNSS receiver. The predicted pseudo-ranges can be obtained using the acquisition assistance data (codePhase and intCodePhase fields.)
Δ x is a column vector [4 x 1] containing the change in the “state” from the approximate position. The state has four unknowns x, y, z and b. x, y, and z are the change in the local East (longitude axis), North (latitude axis) and Up (altitude axis) coordinates from the reference position, b is the common mode error (mostly from the internal receiver clock error) in distance units.
A is an [m x 4] matrix, the first three elements in each row ux , uy , uz are the coordinates of the unit vectors from the receiver to the satellite, the last element is a 1 for the common mode error. A is sometimes referred as the geometry matrix.
Coordinates of unit vectors can be written as a function of the azimuth and elevation of each satellite. Simple trigonometry yields:
ux = cos (el) * sin (az)
uy = cos (el) * cos(az)
uz = sin(el)
In the coarse-time case there will be a fifth column of A containing the range rates, which are provided in the MS assistance data.
The goal is, of course, to determine the change in the state (our unknowns). Using simple least squares
Δ x = (ATA)–1AT Δ y
we can easily determine Δx. The coordinate changes in Δx (delta position) will be applied to the approximate location to obtain the new position.
Assistance Data Required
To re-cap from the previous section, we have seen that to compute Δx we need:
Expected pseudo-ranges for satellites in view (from acquisition assistance)
Measured pseudo-ranges (from the GNSS receiver)
Azimuths and Elevations for the geometry matrix (from acquisition assistance)
It would seem that if the mobile device receives acquisition assistance and measures the pseudo-ranges for a few satellites, it has everything that is required to compute a position (or at least a delta position) inside the GNSS mobile device. The delta position is relative to the position used to compu
te the acquisition assistance. Have we achieved our goal of computing position inside the mobile device with acquisition assistance? Not quite. Let’s now look at the acquisition assistance data in more detail.
We explained that we obtain the required expected pseudo-ranges from the acquisition assistance fields codePhase and intCodePhase. The codePhase field is defined with a resolution of one GPS chip, equivalent to 300 meters. Recall that we subtract the expected pseudo-range from the measured pseudo-range before we use the measurements in the position solution so this means if our expected pseudo-range was in error by, say, 150 meters because of the low resolution of this field, this is similar to making a measurement error of that amount, which of course will cause an unacceptable position error. This means the resolution of the codePhase field would need to be increased to be able to compute position. For a resolution of 2 meters, 8 more bits would need to be added.
The second topic of interest relates to the azimuth and elevation fields. These are needed to construct the geometry matrix A. As mentioned before, in 3GPP location protocols the azimuth and elevation of the acquisition assistance element are defined with a resolution of 11.25 degrees. Sines and cosines (needed to calculate the coordinates of the unit vectors) with such large angle errors will also yield large position errors. In Long-term Evolution Positioning Protocol (LPP), the situation has improved with the resolution being 0.7 degrees.
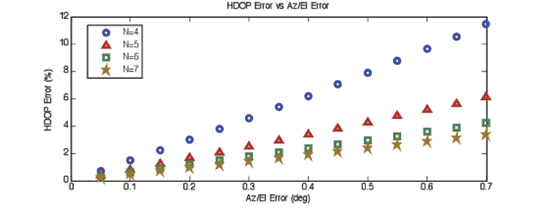
In an effort to quantify how the angle quantization affects the position error, we have run simulations that plot the 95 percentile of the HDOP error as a function of the angle error in azimuth and elevation (see Figure 2.) HDOP is proportional to the position error so this seems to be a reasonable choice. N is the number of satellites used in the simulations. As you might expect: the fewer the satellites the greater the effect.
Figure 2. HDOP error vs Az/El error. We use HDOP as a proxy for the expected position error: if the HDOP changes by 10 percent, we expect the position error to change by a similar amount.
We can see from the plot in Figure 2 that for an angle resolution of 0.7 degrees as currently defined in LPP, the 95 percent HDOP error is under 12 percent. If we wanted to make the worst error (N=4) under 2 percent, we can see that the resolution should be increased to 0.1 degrees. In order to meet this goal, 3 more bits would need to be added to both the azimuth and elevation fields in the acquisition assistance.
Another effect that must be noted is the possible change in the azimuth and elevation from the time the assistance data is received to the time the receiver computes its position (or delta position). In an emergency call scenario, typically we assume this time will not be greater than 24 seconds. Note the total allowed response time for an E-911 call is 30 seconds, including call establishment and network latencies. Simulations based on satellite geometry show that the worst-case effect is approximately of the same order of magnitude as the angle resolution discussed above, and therefore its impact in HDOP is just a few percentage points in the case of N=4.
At this point we seem to have everything we need to compute positions (or delta positions) inside the mobile terminal with the same acquisition assistance used in MS-assisted; albeit with slightly higher resolution in some of the fields.
To facilitate the comparison with MS-assisted and MS-based methods, Table 3 summarizes the exact bit count needed for Single Shot MS-based.
Optionally, if an absolute position is required in the mobile device instead of delta position, it would also require the approximate position (reference location) to be sent along with the rest of the assistance data (acquisition assistance, reference time). However, the MS-based performance advantages listed above can all be realized without the reference location, using only delta position. This is why we have not included Reference Location as an element that is needed for Single Shot MS-based.
Conclusions
We have seen that Single Shot MS-based can be used to enable all the MS-based performance advantages with, essentially, the same assistance data that is used in MS-assisted. Minimal additional bandwidth is required due to the increased resolution of some of the fields. Single Shot MS-based is therefore the best option for network operators that deploy A-GNSS based emergency location.
Not only does MS-based require significantly more bandwidth than MS-assisted (~ 7x) or Single Shot MS-based (~ 6x); but the absolute difference will increase with additional GNSS satellites such as GLONASS, SBAS, QZSS, Compass, and Galileo. Imagine all navigation models have to be sent for all satellites in view and for all GNSS constellations! Acquisition assistance can easily be made generic for every GNSS constellation since it is just “range and Doppler” and, in fact, this is the way it has been conceived in LPP where the dynamic ranges for all parameters are no longer restricted to GPS but allow other GNSS constellations.
Javier de Salas is director of GPS product marketing at Broadcom. Previously he worked at Ashtech, Magellan, and Global Locate. He has an MS in electrical engineering from Universidad Politecnica de Madrid.
Frank van Diggelen is chief navigation officer and senior technical director for GNSS at Broadcom. He is also a consulting assistant professor at Stanford University and is the author of A-GPS: Assisted GPS, GNSS and SBAS. He holds more than fifty issued U.S. patents on A-GPS and has a Ph.D. in electrical engineering from Cambridge University.
Join me on January 29 at 1:00 ET for a free webinar on location-enabled networking applications. I will talk with my guests from Pelago’s Whrrl and Booyah!’s MyTown about the state of the market, monetization, and the future.
January is off to a mad start. iPhones users are no longer hostage to AT&T. CES was cooking with navigation announcements from car makers and more connected personal navigation devices. Garmin took a radical step. Location-based social networks applications are getting hotter with a new entry from Qualcomm. AT&T has a new location service for enterprises. And Groupon is sitting on a mattress stuffed with money.
Qualcomm is now in the location-based social network business with its introduction of Neer, an application for Android and iPhones. Neer is privacy sensitive and designed to keep information within personal groups. Unlike foursquare, it is not searchable. Locations are also given names that don’t disclose specifics. For instance, it may be “meet at school,” “arrived at work,” or “meet at game.” According to Qualcomm, Neer is accurate within a few blocks.
The market. Melissa Parrish of Forrester Research wrote a report on location-based social networks (LBSN) in July that started a heated industry discussion. Parrish estimated the market to be 4% of U.S. online adults, but many argued (some loudly) it was much larger. I asked Parrish for her current thoughts: “The LBSN market is steadily growing,” says Parrish. “Facebook Places hasn’t overpowered the market as many supposed.” This is in part because no one location-based social network app has delivered a clear and overpowering utility, allowing niche players a place at the table. Facebook also hasn’t dominated because it has been collaborative and opened up its social graph to partners like Loopt, Gowalla, and Yelp.
Privacy continues to be a big discussion around these applications. Users are concerned both about sharing their location and having data collected about their activities. As location becomes more accurate and applications become more personalized, the creepiness factor can take hold. Parrish says the question is, “What can be done; what should be done; and what will be legislated?
AT&T enterprise customers in for location. Last week AT&T announced Location Information Services, a cloud-based offering to provide enterprises with network-based location information for corporate assets, employee devices, and consumer handsets. “We’re seeing an increased demand from our business customers to utilize the AT&T global network to be more location aware of their assets,” said Chris Hill, AT&T. The service is being developed with LOC-AID and TechnoCom. The service is scheduled to launch later this year.
Money is flowing. Groupon and SCVNGR are in the money. Groupon is getting a windfall. According to the New York Times, Groupon’s $950 million financing round is the largest venture financing for a start up. Groupon sells bargains in 500 international markets. Users pay up front for discounts such as 50% off shi shi cupcakes in Santa Monica or cellulite reduction treatments in Queens. Last year Groupon partnered with JiWire to enable hyper-local offerings based on a person’s real-time location, allowing contextual ads.
SCVNGR, pronounced Scavenger, got a more modest round of $15 million. Players of this social location-based game are given challenges to compete in a particular location. Challenges might direct you to upload a photo of yourself at Sam Adam’s grave or answer a riddle about a piece of art at the Metropolitan Museum of Art. Google Ventures is one of its investors.
Game that revenue. Advertising spends on mobile gaming apps is predicted by Juniper Research to increase ten-fold over the next five years, from $87 million worldwide in 2010 to $894 million in 2015. The immensely popular Rovio Mobile’s Angry Birds is being offered for free and sustained by ad revenue. Yet Juniper forecasts paid downloads and in-game purchases will be 10 times higher than ad spends in 2015.
Garmin goes Apple (finally!). Apparently, after waiting to see if iPhones catch on, Garmin announced its first iPhone navigation app. The Garmin StreetPilot is a server-based solution, downloading maps as needed, rather than storing them on the phone. It sells for $39 on iTunes. In another first, Garmin is entering the personal and property tracking market with the GTU 10.
Transform your smartphone. Pioneer unveiled SmartCradle for iPhones at CES. The cradle is used in a vehicle in conjunction with a smartphone to create a full navigation application. According to Pioneer, it is compatible with all GPS enabled apps, including MotionX-GPS Drive, which incorporates a built-in gyro sensor and accelerometer combined with an external antenna for improved GPS reception and location accuracy. The SmartCradle will also charge the connected iPhone.
Newbie. Four months ago Geomium launched in the UK and U.S. as a new location-based social network. Michael Ferguson of Geomium says, “We are using real time location and providing our users with a dynamic experience in which they can connect to people, places, deals, and events.” Geomium finds the 20 closest deals within a few miles and provides a stream of “shouts” about what is happening nearby.
It appears that the Consumer Electronics Show is back to its pre-2009 doldrums as hotels, restaurants, cab lines, and registration numbers were up. Despite large wireless carrier presence, CES seemed to continue to be a place where aftermarket navigation providers are hawking their new units. Either way, it still is possible for LBS players, after fighting their way through miles of 3D-capable TV screens, car speakers, and dozens of entities hawking electronic tablets, to find companies still adding location to their consumer electronics offerings.
LAS VEGAS — The Consumer Electronics Show here has historically been a place where companies rolled out new navigation systems–or enhanced existing ones. Despite wireless carriers touting how their next generation services can benefit consumers, the idea that CES is a location-based services show is misleading.
Whether folks with a fancy location-finding social network want to believe it or not, navigation still is king when it comes to consumer awareness and sales. In fact, most of the bigger news came from automobile manufacturers talking about their new electronics and vehicles with navigation as a prominent part of the unit.
Ford’s honcho, Alan Mulally, said that its Sync unit is now in 3 million vehicles. He touted INRIX’ traffic services for road information. Ford also rolled out a fully electric Focus that will have Sync and a full complement of regular systems.
OnStar announced it was offering an aftermarket product for vehicles other than GM products. Best Buy will begin to offer the unit, the company said. However, the price, $299, plus installation, and the $18.95 a month price point, may be steep, said Thilo Koslowski, Gartner vice president. “It is cool [OnStar] is doing this. Something they should have done a while ago,” he said. “However, they are going to have to come down in price.”
While navigation seems to be a big component in new automobiles, there still is this “oh yeah, we offer Google maps” mantra rather than explain how location-enhancement helps sell the vehicle. Rupert Stadler, chairman of the board of management of Audi AG, mentioned his company offers navigation with Google maps, while rolling out an electric car.
Brian Inouye, Toyota’s national manager of advanced technologies, said the embedded navigation device did not die, despite the glut of portable navigation and other aftermarket devices. “When we were selling in-dash units for $3,000, and PNDs were coming out at $300 a few years ago, we were concerned,” he said. “However, people are interested in the connectivity [embedded] units have, the few wires going into the unit they have [compared to PNDs] and new personalization.”
INRIX, fresh off a recent 60 Minutes interview with its company president, had a number of announcements at CES. Toyota and INRIX announced the automaker will use INRIX’s real-time traffic information for the new Entune multimedia system on select audio headunits.
INRIX also showed off its XD Traffic in a Volkswagon Passat at CES. The unit was built on Continental’s AutoLinq platform to show routes, recommended departure times and ETAs. “User personalization is one thing we have been working on. This information includes aggregation of community routes that integrate routes and weather,” said Ken Kranseler, INRIX vice president of product management.
Navteq, in addition to being listed as partners in a number of CES products, had location-enable device offerings such as map data for geotagging and GPS positioning for cameras and camcorders. “We are integrated into the Panasonic Lumix and Fujifilm cameras,” said Toru Yoshimura, NAVTEQ senior manager, customer marketing
Navteq is high on its Discover Cities products for mobile device and pedestrian navigation. “The market is larger in Europe for [pedestrian navigation]. People are walking large distances in urban areas,” said Nicki Harada, Navteq product marketing manager.
Aftermarket Navigation Systems Still in Spotlight at CES
Most of the bigger aftermarket electronics manufacturers still are offering navigation in their in-dash systems. Kenwood is in top three highest selling in-dash navigation systems for 2011, said Keith Lehmann, Kenwood senior vice president. Lehman touted its partnership with Garmin and iBiquity as reasons for the company’s navigation success.
The systems are still for the high-end buyer, with the Kenwood Excelon DNX9980HD going for $2,000. The unit features 3D Garmin navigation and Navteq traffic data service.
Lehmann also said Kenwood is working with Garmin, for the fourth year, to offer a rebate program.
Pioneer announced that it was rolling out a location-based Smart Cradle that has an external GPS receiver, gyroscope/accelerometer for smartphones. Ted Cardenas, Pioneer Car Electronics Division director of marketing, said that Smart Cradle will make smartphone better at getting quality GPS signals. Pioneer is big on putting connectivity in vehicles. “There are some limitations of smartphones — they have small screens and require a user’s complete attention,” Cardenas said, driving home the notion that Pioneer can come up with products and applications that allow users to get all of their mobile information safely without the smartphone being the end all to be all device.
For the PND market, Magellan, Garmin and TomTom all rolled out new units with different features. Magellan’s RoadMate 9055 features lifetime traffic and Bluetooth connectivity to mobile devices. Magellan’s Stig Pederson said that the PND market will concentrate on future consumer personalization to remain competitive. “Sharing data and relevant information is something the consumer wants,” he said.
The connected GO 2505 M LIVE comes fully-loaded with powerful LIVE services, including the award-winning TomTom HD Traffic. The TomTom GO 2505 M LIVE will be available at retail stores and from online retailers in mid-2011 for $349 MSRP. A trial subscription of LIVE services will be available for free with each purchase.
“The traffic is very personalized. It looks at all considerations of the road—actual speed of traffic, rather than posted traffic speed,” said Tom Murray, TomTom’s senior vice president of market development.
TomTom also rolled out the VIA Series PNDs into the United States and Canada markets. The PNDs are slim with a new mounting system that limits exposed wires.
Also at CES, Nike and TomTom unveiled a new sports watch. The new running watch, which has CSR’s SirfSTAR IV GPS installed, is tied to Nike’s online running community that has four million members.
Other CES Observations:
Actor Seth Rogen stopped by a Sony reception to plug the new movie, The Green Hornet, and ran down a list of things his crime-fighting car has: Machine guns, flame thrower…and “Sony GPS navigation system, of course.”
CES management had an LBS zone in North Hall with 25 exhibiting companies, many international. The goodness is, while there was not a single CES-sponsored LBS panel (though there were two in-vehicle panels), the LBS zone had great booth traffic near anchor companies OnStar and Audi.
AT&T Location Information Services was rolled out at their developer’s conference a day before CES. AT&T’s partners include LOC-AID Technologies and TechnoCom.
By Pere Molina, Ismael Colomina, Markus Troger, Bernhard Hofmann-Wellenhof, and Carmen Aguilera
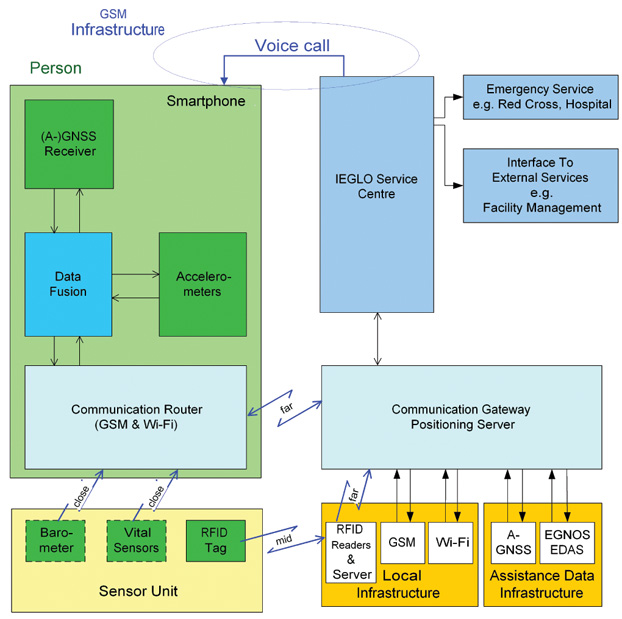
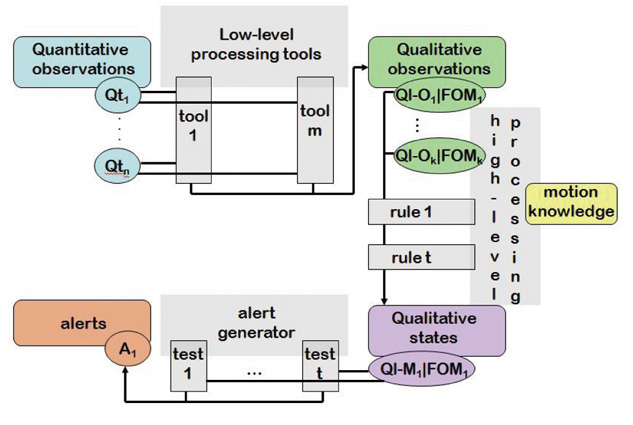
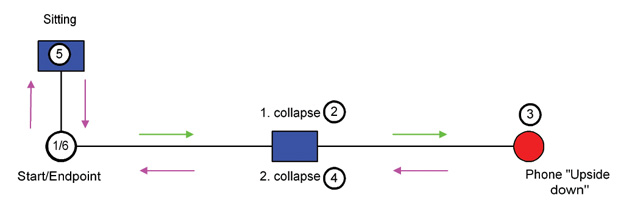
A pocket tracker for elderly people and Alzheimer’s patients consists of a smartphone using GNSS, WLAN, RFID, and GSM for basic positioning, communication channels, and an accelerometer triad for collapse and motion detection. It seeks to determine not only the quantitative where but the qualitative how: has the user lost balance, fallen, or ceased moving?
Accidents involving senior citizens and handicapped people have increased dramatically over recent years. Elderly people, especially those with Alzheimer’s disease, often get in situations where they need assistance due to disorientation or after a physical collapse. The Infrastructure Augmented Galileo/GNSS Receiver for Personal Mobility (IEGLO) project incorporates seamless indoor and outdoor positioning and emergency call services for healthcare applications.
Positioning is very important in such applications, but this target group has another key requirement: 30 percent of elderly people fall at least once per year. Furthermore, falls are responsible for 70 percent of accidental deaths in persons more than 75 years old. 71 percent of falls had physical consequences: 7.7 percent caused broken bones, and 21.7 percent needed medical aid. Moreover, 64 percent of fallers feared of falling again.
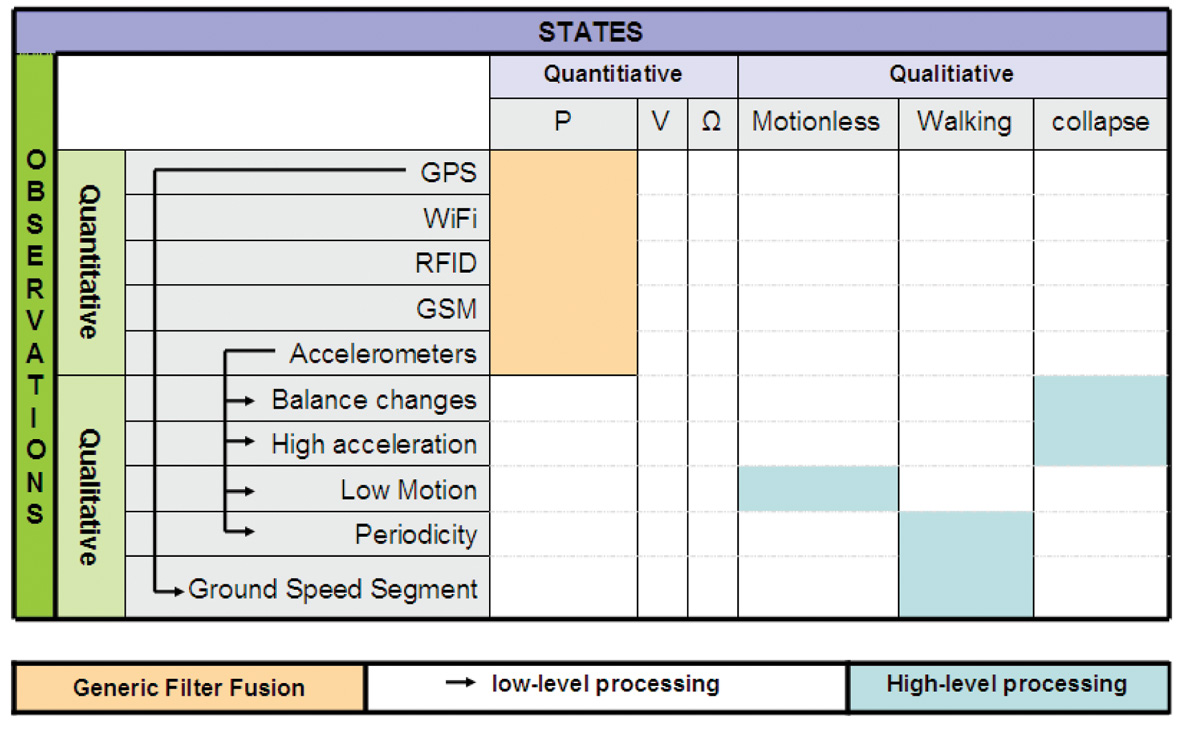
IEGLO seeks to establish automatic and reliable fall detection, through a personal device that can indicate a loss of balance of the carrier. This navigation enhancement — traditional orientation plus information about the personal behavior — has been called qualitative motion analysis (QMA).
System Overview
The IEGLO system concept, shown in Figure 1, consists of three parts: a mobile unit with an external sensor unit; a communication gateway/positioning server (CG/PS), and a service center.
Figure 1. Overview of Infrastructure-Augmented Galileo/GNSS Reciever (IEGLO) system concept.
A commercial-off-the-shelf smartphone with integrated sensors and an RFID transponder represent the components of the mobile unit located at the monitored person. The mobile device cannot be fixed to the body in an precise initial attitude, but must move along with the person in order to capture his/her movements. Distress situations are detectable and alert messages can be generated manually or automatically at the mobile unit.
The mobile unit includes a GPS receiver able to process assisted-GPS data. A Wi-Fi adapter provides additinal communication when Wi-Fi access points are available, or if a determined access point is self-monitored. However, the main communication function in the mobile unit is provided by the GSM module. Both Wi-Fi adapter and GSM module, are also used for positioning purposes. An orthogonal accelerometer triad is integrated in the device and provides accelerometer measurements. For near-field communication, a Bluetooth interface is available. Through it, other sensors such as barometers or vital-signs sensors could be polled.
The RFID transponder forms together with the smartphone the mobile unit. RFID information including the transponder ID is sent to an RFID reader when the person passes by an RFID gate. Several pieces of RFID data are gathered on an RFID server, which sends the information necessary for positioning to the CG/PS.
The CG/PS is responsible for the position calculation. Through a TCP/IP interface, it recieves sensor data from the mobile device and processes it with additional reference information from Wi-Fi, GSM, and RFID positioning. A filter/fusion module calculates one integrated IEGLO position from the different determined positions. That position, together with quality information, is transmitted to the service center. The CG/PS also instantly forwards alarm and status messages from the mobile device to the service center.
The service center forms the interface between IEGLO operator and users. It stores databases of position information and personal information. The geo-database contains all information about the positions of the monitored person. The personal database contains user information, emergency contacts, and nursing staff.
The user interface at the service center is Internet-based. A standard desktop PC with web browser relays alarm messages from the different mobile devices and manages user data and nursing staff information. In cases of alarm, the event is instantly displayed via the user interface. Information such as body behavior, position, and location of the user are visualized for the operator, who can then start the alarm chain, which includes as a first measure contacting the mobile user. As further measures, emergency services can be contacted and guided to the person in distress.
Quantitative and Qualitative Nav
In this article, non-conventional INS/GNSS integration refers to classical, or quantitative navigation, combined with what we have named qualitative navigation. Roughly speaking, quantitative navigation provides the where, while quantitative navigation furnishes the how. Qualitative navigation was a key requirement for IEGLO, as the patient’s primary information of interest is her or his safety status. Figure 2 summarizes the relationships between quantitative and qualitative observations.
Any type of navigation, particularly quantitative navigation, is characterized by a navigation space. For example, in INS/GNSS navigation the navigation space N or state space is P × V × Ω (the set of position, velocity and attitude vectors) and the navigation function
T → P×V×Ω
t → (p,v,ω)
maps the time t into a particular navigation state (p(t),v(t),ω(t)). Typically,
T ⊂ R, P = R3, V = R3 and Ω = [0,2π]3. It is well known that there are various choices for the navigation space, from the simple point navigation where N = P to the complex N = P × V × Ω × B, where B includes time-dependent calibration and other ancillary states.
Qualitative navigation differs from classical quantitative navigation in the navigation space and, clearly, in the navigation function T → N. To illustrate the idea, let us compare and describe the classical quantitative navigation space P × V × Ω with one possible P′ ×V′ × Ω′ qualitative navigation space. While for quantitative navigation we have
t ∈ T ⊂ R,
p = (x,y,z) ∈ P ⊂ R3
v = (vx , vy , vz) ∈ V ⊂ R3
ω = (ωx, ωy, ωz) ∈ Ω = [0,2π]3,
for qualitative navigation we might have
t ∈ T ⊂ R,
p′ ∈ P′ = {hospital, home, park}
v′ ∈ V′ = {not moving, walking, running}
ω′ ∈ Ω′ = {standing, lying, sitting}.
Quantitative navigation is not just about providing estimations of the navigation states; the stochastic figures describing the precision of the estimated states are also provided. Thus, quantitative and qualitative navigation spaces are extended in dimension to include the precision space component, namely ΣP ×V ×Ω and ΣP ×V ′ ×Ω′ .
Navigation theory claims that navigation states might be estimated from observations through the appropriate dynamic and static models (differential and ordinary stochastic equations). Such a statement applies for both proposed navigation approaches, quantitative and qualitative. Thus, the relation model-observation-parameter can be written as l → h(l, X ) for the quantitative case, where:
the quantitative observations l are usually obtained by performing the navigation sensor measurements (INS, GNSS, and so on).
X ∈ P × V × Ω × ΣP×V×Ω
h represents the model that relates l with X (INS mechanization equations, GNSS position models, and so on)
and for the qualitative case, the relation can be written as f → q(f,M), where:
the qualitative observations f are obtained from quantitative observations by performing low-level processing.
M ∈ P′ × V′ × Ω′ × ΣP′×V′×Ω′
q represents the model that relates f with M, based on high-level processing.
In the IEGLO project, this theoretical approach has been materialized by defining the appropriate quantitative and qualitative observation and navigation spaces.
Quantitative Navigation
Quantitative navigation in IEGLO is based on positioning; thus, no quantitative velocity or attitude determination is performed. This leads to a very specific navigation space:
t ∈ T ⊂ R
p = (x,y,z) ∈ P ⊂ R3,
IEGLO uses different positioning technologies for indoor and outdoor positioning; GPS serves as the main positioning method outdoors, while Wi-Fi and RFID are used primarily for indoor positioning.
A GPS position augmentation service has been developed to augment GPS-only position solutions using European Geostationary Navigation Overlay Service (EGNOS) information acquired via the local area network and the Internet. The augmentation service is useful for receivers which are not capable of processing EGNOS data, but also for receivers which cannot receive EGNOS signals due to signal shadowing by urban canyons or the like. In this case, the GPS-only position is transmitted to the augmentation server, which corrects the position solution and retransmits the EGNOS Data Access System/signal-in-space through the Internet (EDAS/SiSNeT)corrected position. Figure 3 shows the functional modules of the augmentation server. EDAS provides access to the wide-area differential correction of EGNOS. SiSNeT is a free service that provides EGNOS widea-rea differential corrections and integrity information over the Internet.
Figure 3. Position augmentation server functional modules
The augmentation server accesses EGNOS information from EDAS or SiSNeT, decodes the data, and stores it in a database. As a backup solution, if EDAS cannot be accessed, the augmentation server can also interface to an EGNOS receiver to decode the EGNOS signal in space. The augmentation server is provided with ephemeris and ionospheric information from EDAS/SiSNeT. The GPS position is received from the correction requesting unit together with its time and used satellites. It is corrected at the augmentation server and retransmitted back to the requesting unit.
From the mobile device, sensor information is transmitted to the CG. The sensor data is processed into positioning messages with additional reference information for Wi-Fi, RFID, and GSM positioning. A generic filter method determines a reliable IEGLO position from the different determined positions, which is transmitted to the service center together with the accuracy and time information. The choice of the position depends on its accuracy and its age.
Qualitative Navigation
Positioning is, indeed, the main navigation component in IEGLO. A main goal of the project is to be able to contact a person in case of an emergency anytime, anywhere, and thus position is sufficient. But beyond this sufficiency, a broader navigation concept can be developed using two of the available sensors in the IEGLO system: the GPS receiver and the 3-axial accelerometer. As described earlier, these two sensor measurements (quantitative observations) would yield some motion features of the person (qualitative observations) with which to estimate the motion context of the person (qualitative states). This is a two-step processing: low-level and high-level.
Low-Level Processing: from quantitative to qualitative observations. As depicted in Figure 2, the qualitative observations used in IEGLO are: ground speed segment, balance changes, high accelerations, low motion, and periodicity. These qualitative observations are low-level processed in two steps. First, robust and non-robust statistical estimators (based in order statistics like the median, median absolute deviation normalized (MADN), α-trimmed mean and deviation, or least-squares like the mean, standard deviation, respectively), and deterministic analyzers (such as the fast Fourier transform (FFT), velocity transformation (VT), equidistant maxima search (EMS) are applied to estimate some intermediate values, like the first and second statistical moments, maximum and minimum values, and FFTs. Secondly, these intermediate quantities are evaluated using propositional calculus to decide if a situation is finally detected. All the qualitative observations’ extraction in IEGLO are described as follows.
On one hand, GPS positions are used to compute the ground speed segments of the device. That is, given a sample of GPS positions P = {(ti, pi )}Ni=1 , the ground speed sample is extracted through a finite difference-based technique called velocity transformation (VT). Thus, a speed sample S = {(ti, si = ||pi − pi-1||ground)}Ni=2 is obtained. In addition, this sample is statistically through robust and non-robust estimators yielding E(S) and, thus, deriving the person’s ground speed profile.
On the other hand, accelerometers are the key sensors to enable qualitative observation computation to later derive a qualitative attitude, that is, the detection of a collapse. Accelerations are involved in the computation of four types of qualitative observations, and its use is based on the following three statements:
Independence of any initial attachment or placement of the device on the body is fundamental to ensure a loose and easy start-up of the device.
Independence of any sensor error-calibration should not be an issue.
Balance is the key observable to perform collapse detection.
First, balance changes are extracted from accelerometers as they sense the gravity vector projection on each axis, and any change on these projections is interpreted as balancing the device. Indeed, balance is not exactly attitude: the gravity vector defines a normal plane, called equilibrium plane, which is a 2-degree-of-freedom object. Nevertheless, the left degree-of-freedom not sensed in this approach corresponds to the heading changes, which do not contribute to collapse situations. Therefore, given a 3-axis acceleration sample AN = {(ti , aix , ai sup>y , aiz)}Ni=1, an analysis is performed using robust and non-robust statistical estimators, as monitoring the first and second statistical moments of this sample enables detection of variations on the gravity distribution among the axes. Finally, thresholding is performed on the propositional calculus to obtain balance change extraction.
Second, given an acceleration sample AN , high accelerations are extracted using the distance operator di= || ai − E {AN} || and a threshold-based propositional calculation.
Third, accelerations are also used for low-motion detection. Given an acceleration sample, AN, first and second moments of the acceleration norm sample (E( || AN || )) and V ar(AN ) = E(( || AN || − E( || AN || ))2)) are computed and evaluated through threshold-based propositional calculations to detect norm-wise low-acceleration profiles.
Finally, accelerations are the key observations to perform periodicity detection. Given a set of accelerations AN, two deterministic analyzers are used to extract periodicity patterns: EMS and FFT. The first technique enables computing j local maximum values, one for each sub-sample ANj, j = 1…m, where AN = Umj=1ANj. Evaluating the j local maximum values interdistance along time against some thresholds enables periodicity detection. The FFT analysis complements the periodicity detection achieved by the EMS technique.
In addition to the extraction itself, a figure of merit (FOM) is computed for each qualitative observation. Consisting of a rational number between 0 and 1, it is an empirical magnitude describing how many extractions have been done for a certain observation in relation to the maximum possible amount of extractions. This figure enables a reliability computation similar to a discrete probability function. Nevertheless, at this stage of development we do not claim completeness and therefore do not state that FOM computation is a discrete probability function.
High-Level Processing: from qualitative observations to qualitative states. So far, one may think that the navigation requirements are already fulfilled: a person can be localized, in a seamless indoor and outdoor way, and thus can be feasibly reached if needed. But IEGLO seeks to enhance this navigation concept to provide contextual information about the person, and eventually activate automatic warning messages in case of undesired motion behavior. To do this, the qualitative navigation concept has been developed by analogy of the quantitative navigation: [qualitative or quantitative] observations are used to estimate [qualitative or quantitative] states.
The qualitative states in IEGLO are:
t ∈ R
V′ ∈ {motionless, walking}
Ω′ ∈ {collapse}
This particular choice of the navigation state is fully driven by the user requirements. With the estimation of the collapse and motionless states, IEGLO can provide the user with an automatic distress detection system. These two states specially represent the type of undesired behaviors that IEGLO seeks to detect and respond to. In addition to the distress states, walking is useful to support the pedestrian navigation concept, which is based on single point navigation.
As can be seen in Figure 2,
collapse estimation is performed by means of the balance change and high-acceleration qualitative observations
motionless estimation is performed by means of the low-motion qualitative observation
walking estimation is performed by means of the ground-speed segment and periodicity qualitative observations
In all cases, the weighted combination of the qualitative observation FOMs is performed to determine the qualitative state FOM, as a degree of truth. The role of the FOMs is crucial when generating automatic alarms in case of eventual distress situations. The more accurate the FOM, the fewer false alarms are generated.
Note that in this high-level processing approach, every model q(f,M) must be fed by values that are external to the process. These values help to fine-tune the adjustment of the model to the user carrying the device. In pedestrian navigation, values like step strength and time-to-step play a role in the walking model and fully depend on the individual’s way of walking. In IEGLO, the knowledge of the individual user is a key piece to properly perform qualitative-state estimation. The IEGLO approach is implemented architecturally to allow to input and removal of data about a specific individual’s motion habits. Figure 4 depicts the architecture of the kinesic behavior detection (KBD) module, the software platform where these qualitative navigation concepts have been implemented.
Figure 4. IEGLO KBD module architecture.
Position Augmentation Tes
To test the augmentation service, a test user terminal (TUT) has been specified and assembled. The TUT uses two identical GPS/EGNOS receivers, interfaces directly with the augmentation server, and processes the position response. One receiver has been configured to output GPS-only position information, the other to use EGNOS corrections for the position computation. The position of the GPS-only receiver was forwarded to the augmentation server. The EDAS/SiSNeT corrected position information was routed to the EDAS file database. In this manner, three different calculated positions of one point per epoch are available: GPS-only, GPS/EGNOS, and GPS/EDAS/SiSNeT (see Figure 5).
Figure 5. Modules of Test User Terminal.
A low-cost patch antenna providing single-frequency (L1) output was used for the tests, connected to an antenna splitter. A notebook computer provided an interface to a GSM/GPRS module and to the receivers.
An April 2010 test was conducted in the area surrounding an assisted living home. Figure 6 shows the number of satellites used for positioning during the measurement campaign. The area around the building was very hilly, so satellite signals were exposed to shadowing effects at the beginning and at the end of the measurements. The middle of the campaign had good satellite visibility.
Figure 6. GPS/EGNAS/EDAS: Number of satellites.
Figures 7–11 show the user trajectory during the dynamic measurement. For better readability, longitude, latitude, and height values were reduced by the mean value of the corresponding coordinate. Therefore, the zero line in the y-axis of each plot symbolizes the mean value of the whole measurement. The same configuration is used for the five plots.
Figure 7 demonstrates the good performance of the augmentation server concept regarding the height solution. The ionospheric delay, which can be corrected with the EGNOS signal, particularly influences the height component of the position. Thus, the potential of the EDAS/SiSNeT-based correction is seen in the height plot.
Figure 7. GPS/EGNOS/EDAS: Height plot.
Figures 8 to 11 show the longitude and the latitude of the different solutions. Two plots of each coordinate were used: the first one shows the coordinates during the whole measurement, and the second one emphasizes the time interval between second 51820 and second 51890. Here, the EGNOS and EDAS/SiSNeT solution are very similar. In some other parts of the measurement, the EDAS/SiSNeT solution is closer to the GPS-only solution.
Figure 8. Longitude overview for the GPS, GPS-EGNOS and GPS-EDAS position solutions.Figure 9. Longitude zoom for the GPS, GPS-EGNOS and GPS-EDAS position solutions.Figure 10. Latitude overview for the GPS, GPS-EGNOS and GPS-EDAS position solutions.Figure 11. Latitude zoom for the GPS, GPS-EGNOS and GPS-EDAS position solutions.
Note that during the whole test, the EDAS/SiSNeT solution was determinable, meaning that even during blockage of the EGNOS signal-in-space, a position augmentation was possible. However, the quality of position augmentation always depends on the quality of the GPS-only position. The test shows a diverse image of the performance of the augmentation server.
The functionality of the augmentation server could be shown.
All positions transmitted to the augmentation server have been processed and transmitted back in corrected form.
Some measurements clearly show the benefit of position correction of the augmentation server, where the EDAS/SiSNeT solution tends to the EGNOS solution
Some measurements show a better height solution than the GPS solution (Figure 7).
The quality of the augmented position strongly depends on the quality of the GPS-only position.
Any receiver only capable of processing GPS but not of EGNOS would benefit from the augmentation server concept.
Collapse, Motionless, Walking Tests
To validate the proposed qualitative navigation approach proposed, a test pattern was specially designed to test the KBD module for two different purposes. On one hand, and by definition, the test pattern should represent all the situations in which detection must be tested, that is, the defined qualitative states: collapse, motionless, and walking. At the same time, the test design should provide means to prove the KBD module resilient against these issues:
False alarms: Users of similar systems have stated that false-alarm generation is the key problem of automatic-detection-based systems of any kind. False alarms are generated when a situation is misunderstood and treated as a undesired situation, causing the system to generate an alarm. In the IEGLO case, some situations such as sitting, walking up or down stairs, or picking up the phone are, motion-wise, similar to the collapse situation. Therefore, the test design includes sitting and picking up the phone, to assess KBD module robustness against false alarms.
Initial Attitude. Many pedestrian navigation systems are constrained by the initial placement and/or attachment to the user. Some systems integrates gyroscopes, and therefore their initial attitude with respect to a person-relative frame needs to be known quite precisely. Other systems based on step detection and gait analysis rely on foot-mounted or hip-mounted accelerometers. The IEGLO approach, driven by the user needs of elderly people and Alzheimer’s patients, cannot assume such constraints. An inconspicuous, yet at the same time, familiar system is desired, and no specific initial attitude is required. Therefore, carrying the phone in a pocket (which turns out to be a preferred placement) shall be sufficient, and its actual initial attitude shall not be relevant.
The test design shown in Figure 12 therefore consists of walking to Point 2, where a collapse situation and a motionless period lying on the floor are performed. After standing up, those actions are duplicated to reach Point 3. There, after standing up, the phone is taken out of the pocket and replaced upside down with respect to the previous attitude. The sequence is repeated to return to the start. Finally, the design leads to Point 5, where a sitting action is performed. After standing up, the end point is reached, and the phone is taken out of the pocket.
Figure 12. Sample correlation function showing two peaks.
Data was collected on four tests. Basically, the inputs of the IEGLO KBD module show that the GPS trajectories are quite discontinuous and different among them. Different visibility conditions, eventual multipath, low-cost receiver performance, and phone position in the pocket are just some examples of causes for the GPS trajectories’ discontinuities. But in any case, these are the conditions that pertain in real use, and therefore draw a very realistic test frame.
Estimation of Qualitative States. Each data acquisition is composed of 16 different possible qualitative states: two collapses, four motionless periods, five walking periods, and five other misleading situations (sitting, taking the phone out of the pocket).
The KBD module estimates the collapse and motionless states perfectly; that is, there were no missed detections (thus no risk on the user’s side) and no false alarms (no risk on the system side) were generated during the execution of the KBD module in the four tests.
For walking detection, two modalities were tested: the accelerometer-only detection and the combined accelerometer/GPS combination. The first mode used qualitative observations only, derived from accelerations, and the second mode used qualitative observations derived from both accelerations and GPS positions. In the first mode, 66 percent of the walking time was properly detected, with 2 percent of false alarms, and 32 percent of missed detections. The acceleration-only approach seemed to work well in very evident walking situations, but at the start or end of walking action, when there is a increase or decrease of motion, the approach was not able to capture a proper walking situation. Nevertheless, when GPS-based observations were used, the results improved up to 80 percent, and missed detections were reduced to 18 percent. Note that the walking state was the only non-distress situation. Therefore, missed detections in that case were definitely not critical for personal safety.
Conclusions and Next Steps
IEGLO uses GNSS technology as the main positioning method in caregiving applications. As healthcare assistance is not a core GNSS application, this potentially expands GNSS adoption.
The combination of indoor/outdoor location technologies using mass-market off-the-shelf devices was the key innovation of the project. Different localization methods were used to obtain a reliable user position.
During the project phase, the position augmentation server was used to enhance the GNSS positions on the server side. If signal blockages occurs or if the mobile units are not able to receive and process the EGNOS signal-in-space, position corrections can be still accomplished. Tests showed that augmented positions provide higher accuracies in the majority of measurements, particularly in the vertical dimension.
With respect to qualitative navigation, the KBD module enhances the navigation domain to gauge user context in addition to user position. Some qualitative states were selected for the KBD as of particular interest for u
ser requirements: collapse, motionless, and walking situations. Results show nearly perfect detection of the first two qualitative states and an 80-percent correct detection of the third.
Further research on qualitative navigation should address the personal signature issue: it is of the utmost importance to determine the biometric characteristics of each user. Customizing the KBD for each user, can provide a deeper analysis of user motion and behavior, such as fatigue, leading to proactive prevention of distress situations.
We may also anticipate GPS receiver improvements in smartphones, as navigation technology gets cheaper, smaller, and better. Potential improvements in walking detection may thus occur through reduction in the number of missed detections. Finally, it is of great interest to investigate other scenarios in which the KBD makes sense: indeed, motion analysis is of interest for many applications such as videogames and personal safety. User requirements must be gathered to contextualize such concepts and to determine KBD software modularity and extendibility.
Acknowledgments
This research received funding from the European Community’s Seventh Framework Programme (FP7/2007-2013) under grant agreement n226971.
The authors thank all IEGLO consortium partners (OECON GmbH, Germany; PIAP, Poland; Tele+ Italia S.A.S, Italy) for their contributions, and a special mention to M. Eulàlia Parés for her work on the qualitative navigation concept and general support.
Manufacturers
The Magellan AC12 served as the GPS/EGNOS receiver in the tests.
Pere Molina is a research assistant at the Institute of Geomatics in Barcelona, where he obtained an MSc in airborne photogrammetry and remote sensing.
Ismael Colomina is the director of the Institute of Geomatics. He holds a PhD in mathematics from the University of Barcelona and is a mem-ber of the Editorial Advisory Board of GPS World.
Markus Troger works for TeleConsult Austria GmbH as system engineer and project manager in positioning and navigation. He received a master’s degree in geomatics science from Graz University of Technology, Austria.
Bernhard Hofmann-Wellenhof received his Dipl.- Ing. and doctoral degree from Graz University of Technology, where he is a professor of navigation and satellite geodesy. He is a founder and managing director of TeleConsult Austria GmbH.
Carmen Aguilera is market development officer at the European GNSS Supervisory Authority. She holds a masters degree in telecommunication sciences.
More Satellites, More Sensors Take Urban Navigation Downtown and Deep Indoors
By Frank van Diggelen
As we all know, GPS is practically perfect in every way — as long as it’s outside and unobstructed. Even cell phones can now produce meter-level accuracy under open sky. There are still many deficiencies in state-of-the-art location, particularly in deep urban canyons and inside large buildings. Which technologies will lead personal navigation into the future?
As we all know, GPS is practically perfect in every way . . . so long as it’s outside and unobstructed. Even cell phones can now produce meter-level accuracy under open sky. And, with Assisted GPS (A-GPS), those cell phones have mitigated the two great deficiencies of the original GPS: slow time to first fix (TTFF), and outdoor-only operation. A-GPS receivers can produce TTFF as fast as one second after a cold start, and (sometimes) work indoors.
However, there are still many deficiencies in the state of the art of location, particularly in deep urban can yons and inside large buildings. In the latter you will soon notice that even if your A-GPS operates in your house, it does not operate everywhere. The term “indoor GPS” is rather like “off-road vehicle”: your four-wheel drive may let you cruise down the beach, but you certainly cannot use it to climb every mountain nor ford every stream. Similarly “indoor GPS” denotes the presence of a capability — not the absence of all limitations.
And so what is the future of urban and indoor navigation, and which technologies will prevail? The short answer is: more satellites and more sensors. In this article we’ll look at the technologies that will move us from the era of GPS-only into the future of GPS-plus.
This is Manhattan.This is Manhattan on Wi-Fi.
Other GNSS
The most likely addition to GPS will be the other global navigation satellite systems, and all GPS receivers will be replaced by true, multi-system, GNSS over the next two to three years. Not because this will ever fully solve indoor location, but because of the outdoor problem in deep urban canyons.
When asked why he wanted to climb Everest, George Mallory famously said “because it is there.” Of the various GNSS systems, those with the most influence in the next few years will be GLONASS, because it is there, and QZSS because (as Mallory might have added) it is high. The first QZSS satellite recently began functional transmission. So let’s use QZSS as an example of why extra satellites are so important in the deep urban canyon.
Figure 1 shows Shinjuku, Japan, a typical deep urban canyon and a terrible place for GPS. The blue dots show the positions of a GPS receiver. The white and orange lines show the actual line-of-sight vectors to the GPS satellites. The white lines are to GPS satellites in direct view. The orange lines are to satellites behind buildings. However, the high-sensitivity A-GPS receiver tracks all these satellites, by acquiring and tracking reflected signals. Thus the whole concept of GPS — of measuring distance by time-of-flight — breaks down. The reflected measurements are inaccurate because of the extra path length. And even if the receiver could somehow tell orange lines from white, the horizontal dilution of precision (HDOP) of the white-only lines is 58 in this real-life example. Now add two high-elevation satellites, shown by green lines, and things are much better. The green lines show the location of two QZSS satellites, and the HDOP of the five green + white satellites is 3.
Figure 1 shows the problem of the deep urban canyon, and the value of extra satellites. The problem is that there are not enough satellites in direct view. This puts receiver designers in an insoluble dilemma: Track only strong satellites, and you will not have enough; or track weak satellites, and you will measure reflections with large measurement errors because of the extra path length of the reflection. Moreover, the reflected signals can be indistinguishable from direct signals in their characteristics, especially in mobile phones where the antennas are poor, and directional — so that signal strength is not a reliable indicator of whether a signal is direct or not.
This example should put to rest the false notion that extra high satellites will not improve HDOP. In this case the HDOP improves by about 20 times, from 58 to 3. It is easy to find many similar examples using GPS + GLONASS or any other GNSS combination. More often than not, extra satellites improve the situation significantly.
The QZSS system uses inclined geostationary orbits to provide high elevation coverage above Japan (and, as a by-product, neighboring regions.) In this respect it is unique amongst the major GNSS: it is exclusively designed to provide good urban coverage of its home region. Compass has a similar component, but ultimately it, like GPS, GLONASS, and Galileo, has global ambitions.
Some other satellite systems, such as satellite radio, use inclined geostationary orbits like QZSS. With QZSS providing an alternative example of a new GNSS, European taxpayers might well ask why Galileo should provide medium-Earth orbit satellites that spend more time over America and Asia than over Europe. As a U.S. taxpayer, I’m all in favor of the current Galileo plan — after all, the United States has been sending GPS satellites over Europe for the last 30 years, so a little reciprocation seems only fair.
Figures 2 and 3 show how the three satellites of QZSS provide better high-elevation coverage over Tokyo (and neighboring regions), than all of the 30 GPS satellites combined.
QZSS-capable chips are already found in mobile phones and tablets available in the Asian market. As this article was being written, a Broadcom BCM4751 chip in Tokyo was computing the first-ever GPS+QZSS position.
Figure 2. Elevation above horizon of the QZSS satellites, as seen from Tokyo. Note that the inclined-geostationary orbits of the QZSS system have been designed so that there is always one satellite above 70°.Figure 3. Elevation of GPS satellites as seen from Tokyo. About half the time none of the 30 GPS satellites is above 70° elevation, a quarter of the time one GPS satellite is above 70°, a quarter of the time two GPS satellites are, and for half an hour three GPS satellite are. The three satellites of the QZSS constellation provide better high-elevation coverage in Tokyo than the 30 GPS satellites.
Wi-Fi
After GNSS, the second-leading location technology is wireless local area networks, commonly known as Wi-Fi. Wi-Fi location works by using a database of media access control (MAC) addresses and locations. When a mobile device senses a Wi-Fi access point, the MAC address and database give the location of the access point (AP). A simple average of many APs gives position accurate to tens of meters.
Wi-Fi location is already tightly integrated with GPS in many smartphones. Wi-Fi location accuracy is good enough that it is often mistaken for GPS, especially in cities where the density of APs is large. In Manhattan, for example, there are more than 25,000 APs per square kilometer (see opening figure.)
Several major companies, including Apple, Broadcom, and Google, have worldwide databases of Wi-Fi AP
locations that are used in mobile devices, especially smartphones and tablets.
MEMS, Accelerometers, and Gyros
The micro-electromechanical systems (MEMS) technique etches the silicon on a chip to exploit its mechanical and electrical properties. A MEMS chip, such as a chip-level accelerometer or rate gyro, thus has tiny moving parts that can sense acceleration or rate of turn, respectively. Both sensors are already common in smartphones, where they are used to set the correct screen orientation (portrait or landscape), and for gaming. Because they are already there, they are a natural addition to location technologies, and many companies are moving rapidly to integrate motion sensors with GPS for improved accuracy indoors and in urban canyons.
As an example of the benefits of MEMS motion sensors, Figure 4 shows a test case where GPS was deliberately degraded by denying it the high direct-view satellites discussed earlier, and then adding nothing but low-cost MEMS sensors.
Figure 4. GPS-only positions and GPS + MEMS. The red circles show where poor GPS-only performance was dramatically improved by the addition of low-cost MEMS accelerometers and rate-gyros such as those already found in certain smartphones and PNDs.
Magnetic Compasses
Like accelerometers and gyros, magnetic compasses are already found in many smartphones. The technology is rapidly evolving, and different techniques are used by different suppliers to determine magnetic north, including Hall effect sensors, fluxgate compasses, and MEMS. Performance is dramatically affected by nearby metal and severely affected by magnets. You may not think that you are surrounded by magnets, but you are — especially in your car where every speaker of your sound system is a magnet — and the better the speaker, the larger the magnet. Thus magnetic sensors alone are not a reliable location technology, but integrated with other sensors, such gyros or accelerometers, they can be and are very useful, especially for pedestrian applications.
Altimeters
Altimeters are another MEMS technology. Typically a hermetically sealed cavity on the chip is used to measure change in atmospheric pressure — the surface of the cavity is deformed as the outside pressure changes, and the deformation can be measured using piezoelectric strain gauges. The integration of altimeters with GPS is already well established for such applications as hiking receivers. Similar integration is likely in other consumer devices, especially smartphones.
AFLT, MRL, and Cell-ID
The three cellular-wireless technologies of AFLT, MRL, and Cell-ID are all components of A-GPS.
AFLT (Advanced Forward Link Trilateration) is a technique used in CDMA phone systems, where the cell towers are precisely synced to GPS time. Because of this precise time synchronization, one can use the cellular signal to measure range from the cell tower, using time-delay just like GPS. CDMA phones with GPS are usually using AFLT when providing position indoors.
MRL (Measured Results List), is the UMTS analogy of AFLT for non-synchronized systems. The MRL provides a list of neighboring cell towers and received power. Received power is used to estimate range, and from this, position. Accuracy is not nearly as good as AFLT, but can be decent, especially in cities where accuracy may be better than 100 meters, good enough for emergency location applications such as E-911.
Cell-ID is simply the technique of looking up location in a cell ID database. This is analogous to Wi-Fi location, but not nearly as accurate since cell tower ranges are much greater than Wi-Fi. However, although perhaps the least exciting, this technique is the foundation of many important technologies. The AFLT and MRL techniques require Cell-ID as a necessary component. A-GPS usually uses Cell-ID for providing the assistance position, a necessary component of the high sensitivity that A-GPS provides. And Cell-ID alone is necessary for E-911 location, when A-GPS fails.
Digital TV and Radio
Location from digital TV works by measuring ranges from DTV towers, analogous to GPS and AFLT. However, DTV towers are not precisely synchronized to each other, and so DTV location requires the build out of fixed site infrastructure to deal with individual tower clock offsets.
DTV location is in a way the opposite of Cell-ID. While Cell-ID is intellectually boring, the technique is practically very important and widely used. DTV, by contrast, is an exciting idea, because it can be accurate like GPS but with much more powerful signals. However, it has been a commercial failure.
DTV location, or related technologies, may enjoy a resurgence in the future once mobile TV or digital radio (HD Radio and DAB — digital audio broadcasting) become more widely adopted.
Pseudolites
Well known to precison-location cognoscenti, pseudolites provide GPS-like signals from ground-based transmitters. They typically use a transmit frequency that is offset from GPS, but otherwise their signals are like GPS so that they can be used with a receiver with the same baseband as GPS.
Pseudolites can be very accurate, as good as five centimeters when using carrier-phase measurements. They require local, fixed transmitters which are fairly sophisticated (since they must maintain time and phase coherency to work properly.) This makes them prohibitively expensive for widespread applications. However, pseudolites are highly valued and widely used in niche markets, and will probably remain so.
IMES and Local Beacons
IMES stands for indoor measurement system, and it, or something like it, could be the most interesting new location technology of all. IMES is a local-beacon system — it works by providing a very weak signal that is exactly like GPS, but is meant for data-transmission only, not ranging. Thus it is fundamentally different from pseudolites, which are designed for ranging. The power of each IMES transmitter is so low (0.1 to 0.4 nanowatts) that it can only be acquired within about 10 meters of the transmitter. The signal is modulated with a PRN code (PRN numbers 173 to 182) and data: the data contains the location of the transmitter. The system technology may be summarized as “if you can hear me, here you are.” And the accuracy is inherently about 10 meters.
A fascinating detail of the IMES data message is that it contains (in message type 000): latitude, longitude and floor number.
IMES is designed to work with any GPS receiver that can decode PRNs 173 through 182. And, because they are not intended for ranging, the transmitters do not have to be precisely synchronized with GPS or with each other. This makes them cheap to build and install. However, they do still need to be deployed in large numbers (at least one every 10 meters), and will require a government-sized effort to become reality. Interestingly, they might just get it: The IMES system is defined in an annex to the QZSS interface specification from JAXA, the Japan Aerospace Exploration Agency. But it is not clear how much funding is available for IMES, or if there is any mass deployment schedule.
Even if IMES is never deployed, other, similar local-beacon systems may emerge. They will require a government-level (or similar) effort for the mass deployment required to make a system a reality for consumers.
Thus IMES or similar local-beacon technology may amount to nothing, or it may be a complete game-changer, depending on how the game is played and how the cards fall.
Summary
We have seen that GPS is practically perfect, when outdoors. And because A-GPS has worked so well over the last decade, it has become the predominant location technology in consumer platforms such as smartphones and tablets. But, precisely because of this success, GPS is more challenged than ever as consumers expect it to work where it was never meant to: indoors, in deep urban canyons, and with very small, cheap, antennas.
These challenges have led us to other technologies, in particular more satellites, sensors, and other wireless location techniques. The most prevalent and valuable additions to GPS in the next few years will be GLONASS and QZSS, as well as MEMS technologies, magnetic sensors, Wi-Fi, and cellular wireless technologies.
Roughly speaking, the 1960s and ’70s were the decades of GPS conception, the 1980s the decade of development and delivery, and the 1990s the introduction to the world. Since 2000 we have had the decade of mass-market adoption, and the 2010s will be the decade of GPS-plus: other GNSS and other sensors.
FRANK VAN DIGGELEN is senior technical director for GNSS, and chief navigation officer of Broadcom Corporation. He is the author of the bestselling textbook A-GPS: Assisted GPS, GNSS and SBAS, and holds more than 50 U.S. patents on A-GPS. He received his Ph.D. in electrical engineering from Cambridge University and is a consulting assistant professor at Stanford University.
From a distance, the Garmin-Asus partnership to produce GPS-enabled smartphones looked pretty good — particularly during the market erosion for portable navigation devices. However, published reports indicate that the companies will not renew their partnership in January 2011.
Switzerland-based Garmin and its Dutch competitor TomTom have seen steeply declining sales for personal navigation devices (PNDs) since the high point of the market two years ago, industry observers say.
“[The Garmin-Asus divorce] was predictable. The product didn’t sell very well and no partnership can survive forever if there’s no revenue coming,” said Marc Prioleau, Technology Growth Advisors principal. “The smartphone market is incredibly competitive and navigation is a pretty standard feature. So you’ve got small revenues, limited differentiation…not much to build a long-term partnership around.”
Since the Garmin-Asus strategic alliance in February 2009, the companies said they have developed and marketed six devices. These products are available through carrier and retail channels in several countries. One of the phones, the Garmin-Asus A10, a touchscreen smartphone running on the Android platform, is optimized for pedestrian navigation.
Location-Based Advertising. TeleNav, which now has 17 million subscribers, recently launched a navigation-based mobile advertising platform that allows businesses to place a sponsored listing at the top of the search results located in its mobile navigation applications. The company says users can click on a sponsored listing to receive additional information such as coupons or menu information.
The user can call, map, or receive turn-by-turn directions to the business — all of which are actions TeleNav measures and reports as metrics to advertisers. Sounds like an interesting concept — but are carriers committing to it?
“We see location-based advertising (LBA) as a natural and important extension of our business. As an industry, I feel that we are only at the tip of the iceberg on advertising within the intersection of location and mobile,” said Ky Tang, TeleNav director of marketing. “This is new for us and for the industry as a whole. While it’s difficult to speak on behalf of a carrier, in general, I’d say that they too see a significant opportunity here.”
TeleNav released data saying which brands are winning the battle for the attention of the mobile consumer. Through analyzing keyword searches of millions of its mobile users, the company is able to identify where consumers are looking to go while on the road.
“We do not in any way, shape, or form provide user-specific information to our advertisers,” Tang said. “We only provide aggregate information of how our users are engaging with their ads within our application. So in addition to the traditional impressions and clicks, we let advertisers know how many people conducted a ‘drive to’ to a specific business.”
Tang said that, in regard to the company’s data analysis, it does provide aggregate data on what users are searching for when using the application. “We believe that this type of information is insightful for brands to really understand how users who are on the go remember and prefer certain brands over others,” he said. “For those whose brand equity isn’t as strong — as measured by how often our users search for their specific name — we give them the ability to promote their brand to the top of the list. One of the implications behind this is that in the mobile, location-based arena, perhaps there’s an opportunity for more brand equality.”
While it remains to be seen whether the LBA space is close to seeing rapid growth, some advertising agencies are taking notice. “Some leading, innovative ad agencies see it and get it right away. But by and large, there’s still a lot of education that is required in this space,” Tang said. “Location-based advertising is very powerful and we see it to represent the next major wave of digital advertising. But in the same way that it took online advertising some time to blossom and become more mainstream, we see the same thing here for location-based advertising.”
The European GNSS Agency (GSA) has published a 2010 GNSS Market Monitoring report, providing key information in support of entrepreneurship in the satellite navigation sector.
GNSS market forecasting is of great interest to private and public GNSS stakeholders, for business and strategic planning and policymaking, said the GSA. According to the new report, the market for GNSS will grow significantly over the next decade, at a compound annual growth rate (CAGR) of 11 percent, reaching €165 billion for the core GNSS market in 2020. Delivery of GNSS devices will exceed one billion per year by 2020.
“This Report confirms that the market potential of GNSS is significant,” said Gian Gherardo Calini, head of the GSA Market Development Department. “The information should be useful to researchers, market players and decision makers who want to grasp the GNSS market opportunities today and tomorrow.”
Report Highlights
Road leads the way: The report shows that the road transport sector is still the leading GNSS segment, accounting for more than 50% of market share. The penetration of receivers in road vehicles, today at 30%, will exceed 80% over the next decade. However, after a period of fast growth, market saturation and competition in the form of ‘smartphones’, often equipped with free navigation capabilities, have resulted in a slowdown in the car-based navigation market.
Price erosion has been high, driven by declining costs and strong competition. Vendors are using innovation as a differentiator resulting in ‘converged’ products with both communication and multimedia functionalities. Some Personal Navigation Device (PND) vendors are also tapping into new distribution channels, including car dealerships and smartphone application stores.
GNSS for road transport: The road transport sector is facing major challenges, such as the demand for increasing safety and for reduced congestion and pollution. These problems are particularly acute in highly populated zones, including big cities and suburban areas. GNSS represents a powerful tool for improving road transport. Not only does it help get drivers where they want to go more quickly and efficiently, but it also promises fairer road-pricing schemes, for example, to automatically charge drivers for the use of road infrastructure.
GNSS in your hands. Mobile location-based services (LBS) are taking off as progress is being made in different areas. More and more mobile phones now have GNSS capabilities, the result of both increasing consumer and developer awareness and an improvement in navigation services and performance.
All major mobile phone operating system vendors now provide application programming interfaces (API) with location functions. In 2009, in the UK, France and Germany, 5 out of the 10 best-selling iPhone applications were related to navigation or location-based applications. Also, 30% of Android developers’ contest winners used location capabilities in their applications.
A promising future for location-based services. The integration of accurate hand-held positioning signal receivers, within mobile telephones, personal digital assistants (PDAs), mp3 players, portable computers, even digital cameras and video devices, brings GNSS services directly to individuals, making possible a fundamental transformation of the way we work and play. The penetration of GNSS in mobile phones is therefore expected to increase very quickly, from some 20% today to above 50% within the next five years.
The GSA says Galileo in the future and EGNOS today open up new and exciting prospects for economic growth, benefiting citizens, businesses and governments throughout the EU and beyond.
Just the beginning. The GSA underlines that the GNSS Market Monitoring process is ongoing and future reports are planned to update information presented in this first report and to cover other sectors. The Agency welcomes stakeholder contributions.