U‑blox has announced the NEO-M9V module, its first GNSS positioning receiver to offer both untethered dead reckoning (UDR) and automotive dead reckoning (ADR).
The NEO-M9V is suitable for fleet management and micro-mobility applications that require reliable meter-level positioning accuracy even in challenging GNSS signal environments such as urban canyons.
Using inertial sensor measurements, UDR offers a smooth navigation experience in dense urban environments by bridging gaps in GNSS signal coverage and mitigating the impact of multipath effects caused by GNSS signals that bounce off buildings. ADR further increases positioning accuracy in demanding environments by including the vehicle speed in the sensor-fusion algorithm.
Offering both UDR and ADR on the same module delivers maximum positioning performance and design flexibility, u-blox said. The NEO-M9V also features dynamic models optimized for both cars and e-scooters.
NEO-M9V is based on the u‑blox M9 GNSS technology platform. Its ability to track up to four GNSS constellations maximizes the number of GNSS satellites within its line of sight at any given moment. Integrated SAW and low-noise amplifier filters offer excellent interference mitigation for a robust solution. Compatibility with the NEO form factor reduces migration efforts for customers upgrading existing designs.
The Air Force Research Laboratory’s complementary positioning, navigation and timing (PNT) AgilePod prototype achieved three important objectives in flight tests conducted at Edwards Air Force Base Nov. 1-10, 2021.
PNT AgilePod helps develop advanced navigation technology independent of GPS, according to Maj. Andrew Cottle, Air Force Strategic Development Planning and Experimentation (SDPE) office. This technology provides reliable, resilient PNT navigation signals through alternative means, increasing mission effectiveness in scenarios where access to GPS is not guaranteed.
The test team — representing a broad base of Air Force, Navy and vendor organizations — successfully executed eight sorties aboard a T-38C aircraft, which included:
the first test of the PNT AgilePod on a high-dynamic-range platform
the first test of fully remote interfacing and alt-PNT data transmission
the first demonstration of overland/overwater transition performance.
He said the tests demonstrated the operational utility of a fused alt-PNT system incorporating multiple technologies within a single government-owned open-architecture prototype.
A PNT AgilePod attached to a T-38C successfully demonstrated remote interfacing and alt-PNT data transmission, as well as performance over land and water. (Photo: USAF/2nd Lt. Bowen Lin, 586th Flight Test Squadron)
AgilePods Designed for Flexibility
AgilePods are comprised of a series of compartments and can be configured to meet a wide variety of mission requirements for many aircraft platforms. Experimenters can fill the spaces with plug-and-play sensors they need for a mission — high-definition video, electro-optical and infrared sensors, and devices with other capabilities — including PNT.
The AgilePod has an open hardware architecture. For the complementary PNT prototype, it was combined with an open software architecture that allows a wide variety of alternative PNT technology to integrate and pass information. These capabilities enable rapid integration of sensor technologies through standardized software and hardware interfaces, allowing the pod to seamlessly integrate on platforms that leverage the standard architectures.
In this way, one pod can perform hundreds of different mission sets with additional benefits of cost savings and increased sustainability, Cottle said.
The project directly supports the AFRL PNT Enterprise and the Air Force PNT Cross-Functional Team as they work to ensure reliable navigation within GPS-contested operational scenarios critical to the success of future Air and Space Force missions.
A PNT AgilePod attached to a T-38C successfully demonstrated remote interfacing and alt-PNT data transmission, as well as performance over land and water. (Photo: USAF/2nd Lt. Bowen Lin, 586th Flight Test Squadron)
Managing live sky and terrestrial time sources to protect critical infrastructure against cybersecurity threats
By Greg Wolff, Microchip Technology
Critical public infrastructure systems that rely on GNSS for reception of positioning, navigation and timing (PNT) data have been identified by national security agencies across the globe as potential cybersecurity attack vectors. Late in 2020, the U.S. Department of Homeland Security (DHS) published the “Resilient PNT Conformance Framework” guidelines, providing a common reference point to help critical infrastructures become more resilient to PNT attack threats. Within the framework, a cybersecurity approach has been proposed.
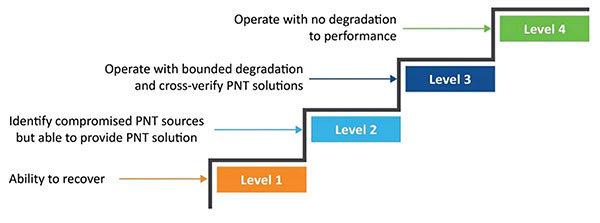
Prevent. In this first layer of defense, threats are prevented from entering a system. However, it must be assumed that it is not possible to stop all threats.
Respond. Atypical errors or anomalies are detected and action taken, such as mitigation, containment and reporting. The system should ensure an adequate response to externally induced, atypical errors before recovery is needed.
Recover. The last line of defense is returning to a proper working state and defined performance.
Figure 1. The four levels of resilience defined in the DHS “Resilient PNT Conformance Framework” guidelines. (Image: Microchip)
Four Levels of Resilience
Based on the Prevent-Respond-Recover cybersecurity model, the PNT Conformance Framework document describes four levels of resilience. Note that the resilience levels build upon each other — Level 2 includes all enumerated behaviors in Level 1, and so forth.
The framework provides a clear set of PNT resilience guidelines for equipment, whether at the silicon, module or system level. Although the framework is not specific to the use of GNSS, much of the focus has centered on GNSS vulnerabilities and the ability to be resilient to GNSS outages, whether caused by unintentional disruptions or intentional threats. However, the GNSS resiliency of specific equipment or technology does not fully address the needs of critical infrastructure operators who are managing the use of PNT services over large geographical areas.
Critical Infrastructure Expansion
Critical infrastructure is typically constructed in a tiered manner, beginning with a set of core sites connected to secondary sites that are ultimately connected to remote sites. With the rollout of 5G networks, densification and massive deployment of wireless access points will improve coverage and enable higher bandwidths to support the internet of things (IoT) and related services. However, this massive scale of access points will also require accurate timing at a much larger number of endpoints.
Within the power utility infrastructure, the power grid is being augmented and expanded with alternative energy sources, such as solar and wind. The modernized smart grid is a highly distributed architecture that is dependent on accurate timing for coordination, monitoring and logging of data for operation and identification of power-outage fault detection. Additionally, power utilities rely on timing services for communications and transport of telemetry data throughout their entire operations.
To date, GNSS has been the go-to source for timing, creating an exponential increase in the dependency on GNSS. Because of this massive dependency, the impact of errors or interruptions today is more significant than ever before.
Figure 2. Example view of timing network at data centers across the globe. (Image: Microchip)
Terrestrial Time Distribution
As an alternative for delivering accurate time to large numbers of locations and reducing dependency on GNSS, critical infrastructure operators are turning to the use of terrestrial distribution using packet protocols so that high accuracy distribution can be achieved using Precision Time Protocol (PTP).
The virtual Primary Reference Time Clock (vPRTC) is a highly secure and resilient network-based timing architecture developed to meet the expanding needs of modern critical infrastructures. The vPRTC is simple in concept. It blends proven timing technologies into a centralized and protected source location, and then uses commercial fiber-optic network links and advanced IEEE 1588 PTP boundary clocks to distribute 100-ns PRTC timing where it is needed in end points that might be hundreds of kilometers away.
Just as a GNSS-satellite-based timing system distributes timing to end points using open-air transmission, the vPRTC distributes timing using a terrestrial (typically fiber) network. The difference is that the operator remains 100% in control of the network and can secure it as necessary. This network-based timing is referred to as trusted time. It can be distributed as the primary source of timing or it can be deployed as a backup to GNSS timing solutions.
Even with the many reliability and security benefits of the vPRTC approach, however, sole dependency on terrestrial time can become a single point of failure, just like a strategy dependent solely on GNSS. Because of this, critical infrastructure operators are deploying architectures that use both GNSS and terrestrial time. To do this effectively, operators find themselves with the need to have centralized management and visibility of both key sources of time. Further, to deliver on the promise of timing resiliency, a unified management system needs to include capabilities that can deliver a cybersecurity solution encompassing the Prevent-Respond-Recover DHS security guidelines across all nodes of the timing network.
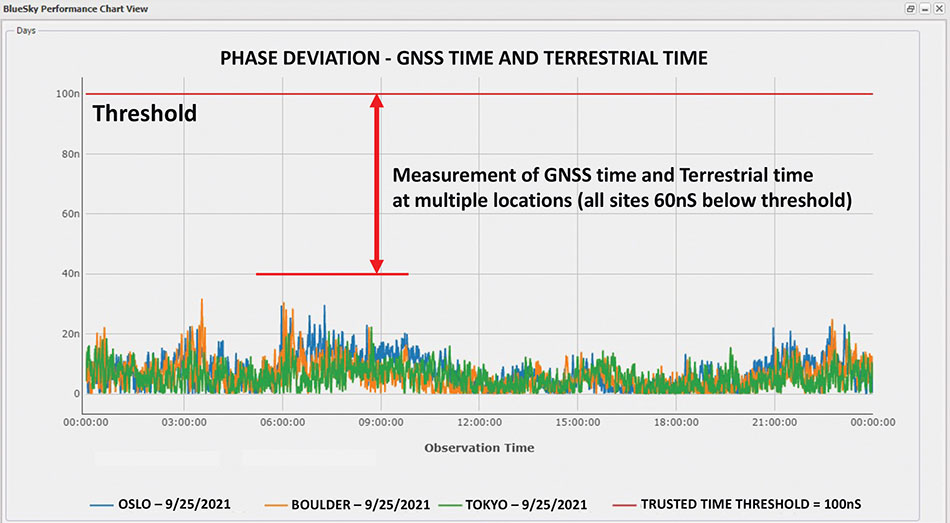
Figure 3. A measurement of phase difference between GNSS time and terrestrial time. (Image: Microchip)
Unified Time Management
Having a bird’s eye view of all nodes of a timing network is essential for providing timing security and resiliency. In the case of a GNSS anomaly or terrestrial time instability, when a problem occurs the most immediate need is to quickly identify whether the event is isolated to a specific location, affects a region, or in some cases is caused by a global situation. A centralized management and monitoring system provides a green, yellow and red threat-status indication representing different locations of interest. It is a simple way for operators to know the overall health of their timing infrastructure.
When problems surface, critical infrastructure operators next need visibility of “observables” that can quickly isolate the root cause. With today’s timing networks relying on both GNSS time and terrestrial time, the ability to see observables that represent both timing sources in a unified manner is critical.
GNSS Observables
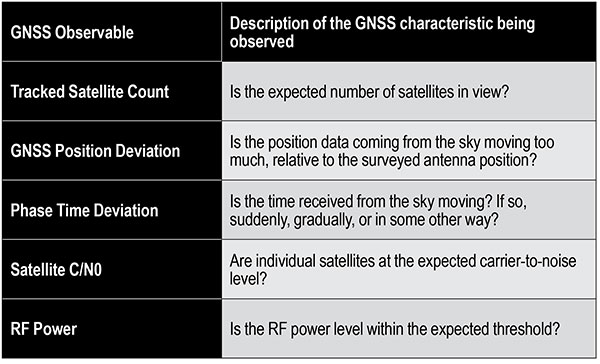
Multipath interference, weather anomalies, jamming and spoofing are terms commonly used when referring to GNSS vulnerabilities. Gaining insights (visibility) into the details to identify the root cause, however, requires more specific characterization of the signal.
Visibility into the quality of GNSS reception is accomplished by monitoring GNSS observables. Table 1 provides a sample of key GNSS observables that can be tracked and monitored.
Table 1. Sample of key terrestrial time GNSS observables.
Terrestrial Time Observables
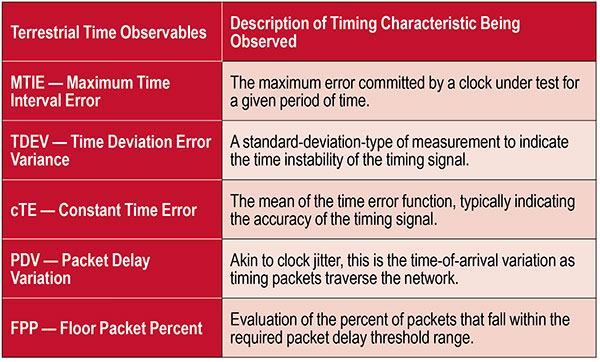
Characterizing the quality of terrestrial time requires time measurements between equipment interconnections within a single location (intra-office) or across nodes of a network (inter-office) — for example, comparison of equipment inputs and outputs or comparison of signals at different sites.
Additionally, with the standardized use of PTP, the ability to evaluate network timing packet metrics is needed to verify time transfer from location to location. Terrestrial time performance calls for a different set of observables to be made visible and monitored. Table 2 provides a sample of key terrestrial time observables.
When managing a large geographical area, being able to measure the phase difference between GNSS time and terrestrial time at multiple locations simultaneously enables an operator to determine how well these two sources of time compare. As described previously, critical infrastructure operators are ultimately in need of resiliency, which can best be achieved using both time sources.
Measuring the two sources against each other at multiple locations creates the highest level of trust knowing that these independent time sources are well aligned.
Table 2. Key terrestrial time observables that must be made visible and monitored.
Conclusion
With cooperation from industry, standards organizations and government organizations such as DHS, the use of timing services has become recognized as a foundational technology for critical infrastructure operations. Leveraging industry-standard cybersecurity models will help strengthen and harden timing equipment.
Although equipment resiliency is vital, having a bird’s eye view of timing performance across the entire network is the starting point for providing complete network visibility that is critical to providing timing security and resiliency. To deliver on the promise of timing resiliency across critical infrastructure, operators need a unified management system that enables simple and complete visibility of both GNSS and terrestrial time observables.
With a unified management of these two timing sources, operators have a platform to apply Prevent-Respond-Recover to timing threats and achieve the highest levels of resiliency and cybersecurity protection.
Greg Wolff is senior product line manager of Frequency & Time Systems at Microchip Technology. He has worked in the time and frequency industry since 1988 and was an early pioneer in the marketing of network synchronization solutions to major critical infrastructure operators across the globe. He is an active contributor to emerging standards supporting PNT resiliency and most recently, as part of Microchip Technology’s Frequency and Time Systems group, launched the BlueSky GNSS Firewall. He holds a degree in engineering science from California Polytechnic State University – San Luis Obispo.
The Avy Aera departs from its docking station within minutes, shortening response times and reducing costs for first responders. (Photo: Avy)
Dutch company Avy has launched its Drone Response Network, combining docking stations with autonomous aircraft that have vertical take-off and landing (VTOL) capabilities.
The network offers drone coverage in a certain area, enabling instant deployment to support medical deliveries or emergency services during critical incidents.
First flights are expected to take place in the first quarter of 2022.
The network uses the Avy Aera autonomous drone that can carry up to 3 kg of medical goods over a distance of 100 km. It can operate year round, in rain and winds up to 45 kph, and is designed to meet the latest European Union drone regulations and United Nation requirements for aerial transport of medical goods.
For medical delivery, the drone is equipped with Aera’s Medkit, which has a four-liter capacity and is fitted with sensors for immediate assessment. Medical products remain cooled at 2-6 degrees for at least 100 minutes in an ambient temperature of up to 40° C.
The Avy Drone Response network is suitable for both urban and rural areas, delivering medicines, blood products, vaccines and other medical applications safer and twice as fast as road transportation, and is more environmentally friendly. It is expected to make a substantial contribution to achieving the goal of connecting hospitals and laboratories by air by 2023.
The Avy Aera can also be integrated with a high zoom RGB and thermal camera system and used to quickly detect wildfires, spot people in distress at sea, monitor oil spills and assess the situation on the ground.
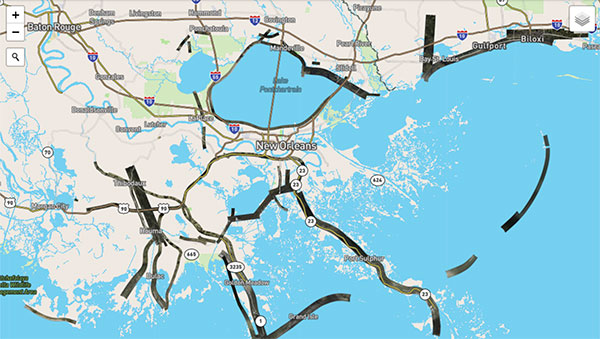
Hurricane Ida assessment imagery and data are now available. Ida was a Category 4 Atlantic hurricane from Aug. 26 to Sep. 4. (Screenshot: NOAA)
Applanix, a Trimble Company, and the National Oceanic and Atmospheric Administration (NOAA) have collaborated to provide critical information to first responders in the wake of Hurricanes Henri and Ida.
Applanix’s high-accuracy direct georeferencing (DG) technology enabled NOAA to quickly collect aerial mapping imagery to
provide valuable disaster remediation information to first responders
demonstrate the value of mapping technology in preparing for and responding to emergency situations such as hurricanes, tornadoes and other disasters.
Within hours of Hurricanes Henri and Ida making landfall, NOAA’s National Geodetic Survey collected post-storm imagery using the latest generation Digital Sensor System (DSS). The sixth-generation DSS, designed and manufactured for Applanix by Lead’Air, is the most powerful to date, thanks to several new features introduced within the solution:
simultaneous full color and near-infrared image capture using high-performance Phase One iXM 100 MP NIR and 150 MP RGB cameras
option to fly the cameras in wide coverage oblique or traditional overhead (straight line down) mode for mapping with uninterrupted measurement
embedded Trimble AP60 GNSS + inertial OEM DG solution for mapping without the need for ground control or aerial triangulation
Applanix POSPac post-processing software featuring the Trimble post-processed CenterPoint RTX correction service (PP-RTX) for centimeter-level mapping without GNSS reference stations
in-air development of raw imagery to JPEG-ready files for creating map products immediately upon landing
Lead’Air’s X-Track flight management, which enables the system to be flown outside of planned flight lines to follow roads, rivers and coastlines.
Applanix’s DG technology suite provides direct GNSS inertial georeferencing, meaning that all pixels in the aerial images taken by NOAA are mapped at their exact location on the ground.
“We have worked with Applanix for nearly 20 years,” said Michael L. Aslaksen Jr., chief of the remote-sensing division, NOAA’s National Geodetic Survey. “The level of sophistication they bring to aerial imagery and mapping keeps our team at the forefront of the industry. Their customer support team is always open to new ideas, new innovations and doing whatever it takes to get the job done.”
First responders have access to this imagery and mapping within 24 hours via the cloud (as does anyone at storms.ngs.noaa.gov) and can map detailed response plans based on highly accurate data highlighting where the greatest need lies.
Access to this turnkey emergency response imagery is available to any federal agency, municipality, insurance company or other entity that depends on highly accurate information to plan for and recover from disasters.
Heavy-equipment maker Komatsu has added two new “smart” products to its job-site solutions for construction contractors, Smart Construction Field and Smart Construction Drone.
Smart Construction Field
Komatsu has partnered with Moovila, an experienced provider of project management software, to develop Smart Construction Field, a mobile app that allows contractors to easily record job site activity and analyze operational efficiencies in near real time.
Reports generated by Smart Construction Field can track daily job-site conditions. Task progress can be broken down by labor, equipment and materials, including machine utilization and fuel distribution, receipts, timecards and subcontractor work. Regardless of equipment brand, Smart Construction Field can collect machine data from an entire fleet.
Smart Construction Drone
Smart Construction Drone survey technology collects accurate topography, including quantities for production tracking and billing, without personnel walking the job site to do a manual survey.
Contractors can gather and analyze data throughout each project phase with topographic surveys that incorporate hundreds of thousands of data points. With the capability to take still photos from up to 400 feet above ground level or under bridge decks, Smart Construction Drone can be used as pre-job verification or to keep stakeholders up to date.
Smart Construction Drone is designed to work with Smart Construction Dashboard. Built to combine data from multiple sources into one comprehensive picture, Smart Construction Dashboard combines 3D design data with aerial mapping and intelligent machine data, allowing contractors to confirm quantities and visualize job-site progress.
Smart Construction Dashboard is powered by the 3D visualization power and geospatial accuracy of Cesium, a platform that visualizes, analyzes and shares 3D data.
Both Smart Construction Drone and Smart Construction Field are part of Komatsu’s Smart Construction solutions, an umbrella of smart applications created to help construction customers optimize their business remotely, and in near-real time.
“When the Smart Construction group came in, they integrated everything, and the transition felt seamless,” said Kevin Hawkinson, vice president of operations, A.W. Oakes & Son. “Now, we can take the data, transfer it to the machines, get data back from the machines to the office, and utilize all of that information across the board for bidding, customer reference and billing.”
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
GNSS technology aids in tracking cargo across the globe, but it can’t defeat a shortage of goods, and of trucks, railcars and ships to move them from ports to their destinations. Nevertheless, some touted solutions are seeking to help. One company, CallPass, is offering a 3D imaging system that claims to eliminate noise from images, providing more accurate cargo measurement accuracy. 3D imaging enables shipping companies to better optimize the space inside trailers and containers. Along with a high-precision GPS/GLONASS receiver, the Lana Vision also uses an ultrasonic-based cargo sensor.
Photo: Gregory_DUBUS/E+/Getty Images
Scouting Radioactivity
Azur Drones and AVNIR Energy have developed a drone package for detecting radioactivity, designed for environmental monitoring of nuclear sites both in France and abroad. The “drone-in-a-box” product integrates a radioactivity sensor into Azur’s Skeyetech drone, the first drone system approved in Europe for beyond-visual-line-of-sight (BVLOS) flights without a remote pilot. AVNIR’s Ionized Zone Inspection Device scintillation detector measures radioisotopes at operational nuclear sites, both routinely and during alerts.
Photo: U.S. Geological Survey
Stay Safe, Mama Bear
Two yearling cubs of world-famous Grizzly 399 have been fitted with GPS-enabled tracking collars near Jackson Hole, Wyoming. Grizzly 399 and her four cubs — an extraordinarily large litter — have been frequenting developed areas for food, but with the collars tracking their movements, the U.S. Fish and Wildlife Service is better positioned to keep the unique family alive and out of trouble until they hibernate for the winter. At age 25, Grizzly 399 is the oldest known female with offspring in the Greater Yellowstone Ecosystem.
Photo: DeepRoute.ai
Nighttime Special Deliveries
DeepRoute.ai has begun operating self-driving, medium-duty trucks in Shenzhen, China. The trucks drive only at night, when there is far less competing traffic. The company expects official operation to launch in 2022 after driverless regulations loosen. The company is also testing Robotaxi service in Shenzhen, to train and validate its algorithm. The current fleet of five trucks could grow to dozens as the company partners with a logistics company to deliver goods.
From its very first issues, 31 years ago, this magazine has covered the role of GPS, now GNSS, in guiding ships, trains and automobiles. What were then some of the most aspirational visions of future applications are now routine. For all forms of transportation, navigation is a safety-critical issue. This is particularly true in the case of cars on public roads, which is also where the technical challenges are the greatest. Ships mostly travel in deep waters, far away from other traffic and fixed obstructions, and nearly always enjoy an unobstructed line-of-sight to GNSS satellites. So do trains, which have the additional advantages of being kept, literally, on track and of operating in controlled environments, with hardly any concerns for unexpected intrusions on their path. Cars, trucks, and busses, on the other hand, must contend with many other vehicles, including those with distracted, drowsy, drunk, or drugged drivers, as well as cyclists, pedestrians, accidents, construction and a bedeviling myriad of sudden and often unpredictable circumstances. Additionally, their view of the sky is often limited by overpasses, tunnels and tall buildings, which challenge GNSS-based navigation with signal occultation and multipath, and their view of their surroundings is often blurred by weather conditions.
Currently, prototype autonomous vehicles carry cameras, lidar scanners, radars and ultrasonic sensors to provide positioning relative to mapped features, as well as for collision avoidance. However, some use cases require absolute positioning sensors, consisting of GNSS receivers coupled with inertial sensors. For example, autonomy levels 3 and 4 require dynamic error bounds of no more than a few meters most of the time under challenging highway conditions and levels 4 and 5 will require this level of accuracy even in deep urban canyons.
This month’s cover story highlights progress in several transportation-related GNSS/PNT applications
Researchers presented hundreds of papers at the 2021 Institute of Navigation (ION) GNSS+ conference, which took place virtually and in person Sept. 20–24 in St. Louis, Missouri. The following five presentations focused on the challenges of urban navigation. The papers are available at www.ion.org/publications/browse.cfm.
Integrating Autonomous Air Vehicles
The emergence and development of advanced technologies and vehicle types has created a growing demand for the introduction of new forms of flight operations. These new and increasingly complex operational paradigms, such as Advanced and Urban Air Mobility (AAM/UAM) present regulatory authorities and the aviation community with several design and implementation challenges — particularly for highly autonomous vehicles.
An overarching and daunting task is finding methods to integrate these emerging operations without compromising safety or disrupting traditional airspace operations. Predictive risk mitigation is critical to meeting this challenge. The authors of this study focus on the development and testing of a prognostic service aimed at estimating the quality of GNSS performance for an autonomous aircraft in complex environments. Flight operations would be able to factor into pre-flight and in-flight route planning an estimate of GNSS quality, thereby predicting poor or unacceptable navigation system performance. The authors provide methodologies for producing quality estimates, and provide results for selected simulation and flight-test cases.
Citation. Dill, Evan, Gutierrez, Julian, Young, Steven, Moore, Andrew, Scholz, Arthur, Bates, Emily, Schmitt, Ken, Doughty, Jonathan, “A Predictive GNSS Performance Monitor for Autonomous Air Vehicles in Urban Environments,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 125–137. https://doi.org/10.33012/2021.18138
Processing Scheme for Integrity Monitoring
Integrity monitoring is of great importance for GNSS applications. Unlike classical approaches based on probabilistic assumptions, the alternative interval-based integrity approach depends on deterministic interval bounds as inputs. Different from a quadratic variance propagation, the interval approach has intrinsically a linear uncertainty propagation adequate to describe remaining systematic uncertainty.
To properly characterize all ranging error sources and determine the improved observation interval bounds, the authors propose a processing scheme. The team validated how the sensitivity analysis is a feasible way to determine uncertainty intervals for residual ionospheric errors and residual tropospheric errors, taking advantage of long-term statistics against reference data. Transforming the navigation problem into a convex optimization problem, the interval bounds are propagated from the range domain to the position domain. The authors implemented this strategy for multi-GNSS positioning in an experiment with static data from International GNSS Service (IGS) station Potsdam (POTS) and an experiment with kinematic data from a measurement campaign conducted in the urban area of Hannover, Germany, on Aug. 26, 2020.
Citation. Su, Jingyao, Schön, Steffen, “Improved Observation Interval Bounding for Multi-GNSS Integrity Monitoring in Urban Navigation,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 4141–4156. https://doi.org/10.33012/2021.18078
Removing Multipath Errors
In the urban environment, multipath and non-line-of-sight cause measurement errors and signal power loss. In urban canyons, while multi-GNSS provides the required number of satellites to obtain a position, the signals may be affected by gross multipath errors, leading to a potentially unsafe position. In this paper, the authors use machine-learning techniques to model multipath error distributions. The features assessed are commonly used parameters such as elevation, S/N and user speed.
The authors drove a sensor-equipped vehicle in Toulouse, France, collecting hours of experimental data for evaluation of their model’s validity. The multipath error component was extracted from data processed from a single-frequency GNSS receiver using measurement differential, clock bias estimation and other techniques. The quantile of multipath error was then modeled using a neural-network-based regression technique. Results using the proposed method are validated by an integrity assessment of the experimental data.
Citation. No, Heekwon, Milner, Carl, “Machine Learning Based Overbound Modeling of Multipath Error for Safety Critical Urban Environment,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 180–194. https://doi.org/10.33012/2021.17874
GNSS/INS/Radar Sensor Fusion
Autonomous driving has gathered much interest in recent years with significant research directed at solving the localization problem. To enable a fully autonomous platform, the navigation system must provide accurate solutions at high rates, be reliable, and be available in all types of environments. These requirements necessitate the use of multiple sensors while remaining cost-effective to enable widespread adoption.
To maintain accurate positioning in GNSS-challenged areas, perception sensors such as cameras, lidar or radar provide another source of absolute positioning information. This paper presents a multi-radar integrated version of AUTO, a real-time integrated navigation system that provides an accurate, reliable, high rate and continuous (always available) navigation solution for autonomous platforms by integrating INS, GNSS-RTK, odometer and multiple radars sensors with high-definition maps. AUTO uses a tight nonlinear integration scheme to fuse information from multiple imaging radars with the INS/GNSS/odometer solution. The HD maps may come from a map provider or be crowdsourced from radar data.
The results in this paper compare multi-radar configurations of one to five imaging radars for a vehicle and demonstrate the accurate solution achieved through the tightly integrated system. Key performance indices are presented for a multi-radar configuration of AUTO for vehicle and robot. The results show how radar data contributes significantly with other sensors to provide a high-rate, accurate, reliable and robust navigation solution in GNSS-degraded environments and adverse weather conditions.
Citation. Krupity, Dylan, Ali, Abdelrahman, Chan, Billy, Omr, Medhat, Salib, Abanob, Al-Hamad, Amr, Wang, Qingli, Georgy, Jacques, Goodall, Christopher, “AUTO: Multiple Imaging Radars Integration with INS/GNSS for Reliable and Accurate Positioning for Autonomous Vehicles and Robots,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 77–92. https://doi.org/10.33012/2021.17903
Feature Matching for Visual Nav
Typical feature matching on aerial imagery results in a majority of features being placed on trees and other seasonally variable features. The researchers tested the effectiveness of using semantic segmentation to create and force robust features onto desired areas of an image for the purpose of visual navigation. The process involves testing several segmentation algorithms to achieve state-of-the-art segmentation results and evaluating the effectiveness of feature matching on segmented imagery. The aim is to develop a near state-of-the-art semantic segmentation model for aerial imagery that can extract desired buildings from an image.
The research will then focus on feature-selection and feature-matching algorithms to compare the segmented aerial key features with a database of features from satellite imagery. So far, results show that feature selection algorithms such as SIFT fail to overcome the nuances among multisource aerial imagery. Improving the feature selection algorithm ideally will allow for an increased quantity and quality of matches, ultimately resulting in a camera pose estimation sufficient to be a reliable alternative to GPS.
Citation. Hussey, Tyler, Leishman, Robert C., Woodburn, David, “Towards More Robust Vision-based Map Matching Through Machine Learning & Improved Feature Matching,” Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, Missouri, September 2021, pp. 1647–1653. https://doi.org/10.33012/2021.17911
Autonomous vehicles require lane-level accuracy at all times and in all conditions. However, under many conditions, such as in urban canyons and tunnels, they may lose line-of-sight to enough GNSS satellites to achieve accurate and robust positioning or may have no signal at all. In these situations, they need data from other sensors, including an odometer and an inertial measurement unit (IMU). Creating reliable and safe autonomous navigation requires fusing GNSS and inertial technology in a multi-layered system.
SBG Systems and its partners LeoDrive.ai and Intempora, have been doing this to develop solutions for autonomous vehicles. SBG’s technology enables multi-sensor integration while addressing such autonomous navigation challenges as time synchronization, integrity, precise positioning and high-definition mapping.
“To ensure performance and build trust, we assemble our own IMUs from carefully selected industrial-grade parts, then we calibrate all our products individually,” said Laurent Le Thuant, business manager for SBG, in a recent webinar.
For safe operation, Le Thuant explained, the vehicle’s true positional error (PE) must be smaller than its protection level (PL), which in turn must be smaller than its alert limit (AL): PE < PL < AL. Otherwise, the solution is declared unavailable or reports misleading information.
In automotive tests conducted in a business district near Paris, an SBG vehicle was equipped with both a GNSS-only, automotive-grade multiband RTK receiver equipped with a PL determination algorithm and an RTK GNSS receiver tightly-coupled with an IMU and an odometry input. A comparison showed that the former was not suited for self-driving, while the latter significantly improved the solution availability, accuracy and protection levels.
For self-driving in the most severe conditions, even this solution requires integration of supplementary sensors, such as cameras, lidars and radars for precise localization.
Swift Navigation designs, manufactures and integrates GNSS receivers, as well as providing the Skylark wide-area GNSS corrections service. Its markets are automotive, transportation (last mile delivery, commercial trucking, rail), robotics/machine control (construction, mining, precision agriculture, landscaping), UAVs, micromobility and mobile devices and applications.
The company’s technology is compatible and interoperable with most major GNSS receivers for multiple markets. Its Starling positioning engine and Skylark corrections “are scalable to bring precision to legacy low-cost single-frequency receivers, all the way to the most sophisticated state-of-the-art triple-frequency multi-constellation systems,” said Joel Gibson, Swift’s executive vice president of Automotive. “By working with a multitude of receiver vendors for different applications, Swift leverages all constellations and all signals and maximizes the performance required for the application.”
The most accurate and reliable navigation system for every application would take advantage of all available GNSS signals, as well as all available corrections, dead reckoning and fused data from other sensors, such as cameras, lidar and radar. However, of course, that is not possible due to cost, size, weight and power considerations. Swift’s approach to the trade-offs required depends on each use case.
Micromobility
In the area of micromobility (such as scooters), the main constraints for implementing a positioning solution are cost and power, coupled with the challenge of satellite signal outages and multipath in dense urban environments where these vehicles primarily operate, Gibson explained. “Cost-effective dual-frequency GNSS receivers are now showing up in micromobility architectures. Pairing them with our Starling positioning engine, which integrates inertial sensor data and wheel ticks, and augmenting them with Skylark corrections data, makes it possible to meet such compliance requirements as geofencing and limiting sidewalk use.”
Additionally, by achieving decimeter-level positioning, Swift’s micromobility solution makes it easier for both users and service staff to find scooters, which increases the scooter companies’ revenues.
Photo: Swift Navigation
Automotive
In the automotive industry, inertial sensors and wheel odometry are ubiquitous and pair naturally with GNSS to mitigate satellite signal outages, Gibson pointed out. Likewise, cameras and radar — cornerstones of ADAS — are very complementary to GNSS for safety applications, and lidar further complements GNSS in feature-rich environments such as dense urban areas.
Rail
Rail applications, such as Positive Train Control, have traditionally needed an accuracy of one or two meters, coupled with ruggedized hardware. “Swift’s precise positioning solution is deployed across continental rail systems today, and we are now engaging rail OEM and operator programs requiring sub-meter accuracy to ensure track-to-track accuracy and safety requirements in support of the transition to more autonomous rail operations,” said Gibson. “Leading rail companies are also looking for operational efficiencies by transitioning away from the high operational costs of maintaining reference base stations along track routes, instead moving to the more cost effective, reliable and seamless Skylark corrections coverage.”
Flipping the traditional scenario, in which car racers risk their lives on a racetrack, the Indy Autonomous Challenge (IAC) aimed to help save lives by improving collision avoidance systems, train future automotive engineers, and make the public more comfortable with autonomous cars. Held Oct. 23 at the Indianapolis Motor Speedway and organized by Energy Systems Network, the race saw 21 universities from nine countries forming nine teams to compete for a $1 million grand prize. Following in the footsteps of the DARPA Grand Challenge, first held in 2004 and later renamed the DARPA Urban Challenge, the IAC was the world’s first high-speed autonomous race. The winning team was TUM Autonomous Motorsport from the Technical University of Munich, Germany.
All competing teams were given the same identical vehicle to work with, a Dallara AV-21, modified to carry no one in the cockpit and equipped with two Hexagon | NovAtel PwrPak7-Ds multi-frequency, multi-constellation GNSS receivers, six cameras (two of which faced backward), three lidar scanners and four radars. Each team had to develop its own autonomy-enabling software stack, including the algorithms and neural networks. All the components, except the computer, had to be commercial-off-the-shelf, available on the market. No sensors could be custom-made.
Since 2001, Dallara has been the sole supplier of the Indy Lights series, a championship to prepare drivers for the NTT IndyCar Series. The Dallara AV-21 is a collaboration between Dallara’s Italian headquarters in Varano Melegari (Parma) and Dallara IndyCar Factory in Speedway, Indiana. The new car offers a modern, stylish appearance and provides the proper training required for drivers as the final step on the ladder to the NTT IndyCar Series.
The process by which the automated vehicle sensors and computers were fused into a singular package and integrated into the AV-21 was led by Clemson University’s International Center for Automotive Research’s Deep Orange 12 (DO12) project. The Deep Orange process mirrors that of automotive original equipment manufacturers (OEMs), and the DO12 project scope allowed for engineering and innovation across multiple subsystems. Student groups within the DO12 team explored solutions within and across multiple subsystems, including:
vehicle-to-vehicle communications
perception systems
onboard computing
drive-by-wire chassis control systems
vehicle dynamics
vehicle-to-infrastructure communications
powertrain design and integration
vehicle demonstration based on high precision GPS.
Hexagon’s Autonomy & Positioning division provided GNSS receivers and subject-matter experts to the Deep Orange 12 team. The team architected the sensor kit for the Dallara reference vehicle, which AutonomousStuff then replicated 10 times. The team did not compete in the IAC to avoid a conflict of interest and allow students to work closely with competitor teams from universities around the world. The PwrPak7-E1 contains a MEMS IMU to deliver Hexagon | NovAtel’s SPAN technology, a deeply coupled GNSS + inertial engine in a single-box solution. Each GNSS receiver has two antennas to provide heading. The Deep Orange 12 team used HxGN SmartNet RTK corrections, which brought the accuracy down to a few centimeters.
Without developing a driverless decision-making algorithm, Clemson students tested the vehicle with the help of a high-precision positioning system. They developed a control algorithm that can track the optimal line around the Indianapolis Motor Speedway such that all vehicle systems could be validated in a simulated racing environment. Data from these tests were shared with the competition teams to aid in their development of driverless algorithms.
Energy Systems Network will host a head-to-head, high-speed autonomous racecar passing competition at the Las Vegas Motor Speedway on Jan. 7, 2022, during the Consumer Electronics Show. Several of the teams that competed in the IAC, including the winner and finalists, will participate. The primary goal is to advance technology to speed commercialization of fully autonomous vehicles and deployments of advanced driver-assistance systems.