SouthPAN includes Safety-of-Life L1 SBAS for civil aviation and open services for precise point positioning and next-generation SBAS.
The Southern Positioning Augmentation Network (SouthPAN) has successfully completed its Critical Design Review (CDR), marking a pivotal milestone towards delivering advanced satellite-based augmentation services (SBAS) across Australia and New Zealand.
Led by Lockheed Martin Australia, with GMV as a key strategic partner, SouthPAN is jointly supported by the Australian and New Zealand governments to provide satellite navigation and precise positioning services throughout Australasia.
The Critical Design Review represents a vital checkpoint in the lifecycle of a safety-critical system such as SouthPAN, validating that the design meets stringent performance, safety and security requirements necessary for civil aviation operations. As part of this milestone, the SouthPAN team provided comprehensive certification artifacts aligned with international aviation standards, including ARP 4754A for systems development processes, DO-254 for hardware, and DO-278A for software assurance.
The successful completion of the CDR demonstrates that the system’s architecture and implementation will satisfy the rigorous design assurance levels mandated for safety-of-life applications. Achieving this milestone confirms the readiness of the system’s design for operational deployment and marks a critical step forward towards its future certification for safety‑of-life services in the aviation sector.
SouthPAN is notable as the first SBAS globally designed from its inception as a service rather than as a conventional turnkey system. This service-oriented approach enables scalability and potential expansion into other regions, while establishing clear customer-provider interactions governed by service-level agreements (SLAs) and adherence to defined key performance indicators (KPIs).
Early open services have been provided since September 2022, demonstrating immediate benefits to users across Australasia. Moving forward, the SouthPAN service will fully deliver safety‑of-life L1 SBAS critical for aviation operations, significantly enhancing flight safety through precise runway approaches and superior navigation accuracy.
Additionally, SouthPAN has integrated cutting-edge dual-frequency multi-constellation (DFMC) SBAS and precise point positioning (PPP) through SBAS as open services available to diverse users, including the agriculture, maritime, rail, road transport and geomatics sectors. The DFMC SBAS capability is designed to support an effortless transition to future safety-of-life services through engineering updates and software modifications, without necessitating costly hardware replacements.
GMV is responsible for two core elements of the SouthPAN project: the Corrections Processing Facility (CPF) and the Ground Control Center (GCC). These facilities will ensure that SouthPAN consistently meets stringent performance benchmarks by generating precise corrections for navigation signals and promptly identifying and reporting anomalies critical for safety-of-life aviation services. GMV also leads the navigation performance engineering activities and continuous performance monitoring, ensuring the system reliably fulfills its specified operational criteria.
New multi-orbit space company has network of 120 GEO+MEO satellites and access to LEO constellations.
SES, a space solutions company, has completed its highly value accretive acquisition of Intelsat, creating a strengthened global satellite operator with an expanded fleet of 120 satellites across two orbits. The newly combined company will leverage its skilled teams with deep vertical expertise to deliver integrated multi-orbit, multi-band satellite and connectivity solutions to businesses and governments around the world, creating a stronger multi-orbit operator with ~60% of revenue in high-growth segments.
With a network of approximately 90 geostationary (GEO), nearly 30 medium earth orbit (MEO) satellites, strategic access to low-Earth-orbit (LEO) satellites, and an extensive ground network, SES can now deliver connectivity solutions utilizing complementary spectrum bands including C-, Ku-, Ka-, Military Ka-, X-band and Ultra High Frequency. The expanded capabilities of the combined company will enable it to deliver premium-quality services and tailored solutions to its customers. The company’s assets and networks, once fully integrated, will put SES in a strong competitive position to better serve the evolving needs of its customers including governments, aviation, maritime and media across the globe.
Adel Al-Saleh, CEO of SES, talks about the new combined company in the video below.
The transaction establishes a more robust financial foundation for SES, with pro formacombined revenue of €3.7 billion projected to grow at a low- to mid-single digit CAGR (2024-2028E). The combined company pro forma Adjusted EBITDA of €1.8 billion is expected to grow at mid-single digit CAGR including synergies (2024-2028E), with plans to generate over €1 billion in Adjusted Free Cash Flow by 2027-2028 (pre IRIS2). This stronger financial profile is supported by a combined contract backlog exceeding €8 billion, providing clear visibility into future revenue streams.
SES plans to maintain disciplined investment in future growth, with annual capital expenditures averaging €600–€650 million from 2025-2028E, excluding the IRIS2 programme. This will enable the company to continuously strengthen its network and explore emerging growthmarkets including Internet of Things (IoT), direct-to-device communications, inter-satellite data relay, space situational awareness, and quantum key distribution. The company’s profitable growth outlook, strong balance sheet metrics and expanded cash flows will support both continued innovation and increased shareholder returns, with the intent to raise the annual base dividend once targeted net leverage of below three times is achieved within 12-18 months after closing.
By integrating the two organizations, SES expects to deliver synergies with a total net present value of €2.4 billion, representing an annual run rate of approximately €370 million, with 70% of these efficiencies anticipated to be executed within three years after closing. These savings will primarily come from streamlined operations, optimised capacity costs, and procurement efficiencies, along with the strategic integration of satellite fleets and ground infrastructure.
SES remains headquartered in Luxembourg and is publicly listed on the Paris and Luxembourg stock exchanges (Ticker: SESG), while maintaining a significant presence in the United States with its North American main office in McLean, Virginia.
Bluetooth network enables real-time asset tracking for enterprises worldwide
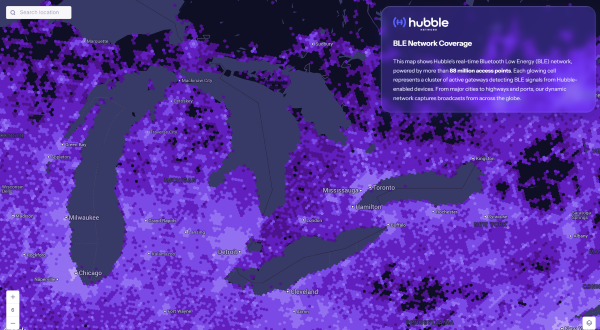
The new Hubble BLE Finding Network is a Bluetooth Low Energy (BLE) finding network built specifically for enterprise use. Hubble, based in Seattle, is a satellite startup enabling Bluetooth devices to connect directly to space.
While consumer platforms like Apple’s Find My and Google’s Find My Device brought BLE discovery to personal devices, Hubble now brings that same reach and simplicity to businesses, offering real-time visibility and full data ownership on a global scale.
“Consumer networks proved what’s possible, but businesses were left out,” said Alex Haro, co-founder of Hubble. “We’re giving them a powerful alternative with global visibility, zero infrastructure and full ownership of their data.”
The Hubble BLE Finding Network leverages nearly 100 million passive scanners across gateways, smartphones and partner infrastructure, powered by low-cost BLE chips already embedded in billions of devices. This extensive network covers homes, cities, transit systems and industrial sites, enabling comprehensive global asset tracking for enterprises.
Key Features
Global Reach: Real-time bluetooth discovery via 88+ million scanners worldwide.
Data Ownership: Maintain full enterprise control with no closed systems or vendor lock-in.
Infrastructure-Free: Activate tracking with existing BLE devices, no hardware required.
Robust Security: Protect data with encryption, rotating IDs, and verified endpoints.
Developer Friendly: Enable seamless integration with open SDKs and APIs.
Enterprise Use Cases
Asset Tracking: Monitor tools, inventory, and equipment globally.
Fleet Management: Track assets in transit, on job sites, or in the field.
Temperature Monitoring: Instantly track temperature with BLE sensor tags.
Workplace Safety: Locate badges and wearables in hazardous environments.
Equipment Sharing: Gain visibility and usage insights across distributed teams.
The Hubble’s BLE Network is now live and available for commercial deployment, including developer tools and onboarding support. To learn more or apply for access, visithttps://hubblenetwork.com.
In March 2024, Hubble made history with its Bluetooth connection to space. With a 96-satellite constellation planned by 2028, the company aims to connect one billion devices worldwide.
Q-CTRL has completed a major field trial with Australian Defence on board the Royal Australian Navy’s Multi-role Aviation Training Vessel (MATV), the MV Sycamore. The results of the trial demonstrated advancements in software-ruggedized quantum sensing for navigation.
In the trials, Q-CTRL field deployed a quantum dual gravimeter, which measures tiny variations in Earth’s gravity as part of a next-generation quantum-assured positioning, navigation, and timing (PNT) system operable when GPS is unavailable or untrusted.
This first trial saw over 144 hours of continuous operation and successful data collection with no human intervention during real maritime operations.
“Quantum sensors provide a near-term opportunity to achieve transformational defense capabilities, but previous deployments in the field have struggled to deliver defense-relevant performance,” said Q-CTRL CEO and founder Michael J. Biercuk. “Operating on a real moving vehicle is just not the same as conducting a science experiment; at Q-CTRL, we’ve taken a different approach to getting quantum sensors out of the lab, focusing on software as the critical enabler of performance in the real world.”
Earlier this year, Q-CTRL announced successful airborne field trials of a new generation of quantum-magnetic navigation solutions, Ironstone Opal, validated for the first time to outperform comparable conventional alternatives in challenging real-world settings by 50 times.
Developed and fielded in 14 months, the dual gravimeter was installed in a “strapdown” configuration (bolted to the floor) in the space of a single server rack in a communications room onboard MV Sycamore. The sensor consumed only 180W of power – about 10 times less than a household toaster.(Photo: Q-CTRL)
The newly announced trials of Q-CTRL’s gravimetric navigation technology open opportunities to bring quantum-assured navigation to maritime vessels where magnetic navigation can be less effective.
GPS denial has become one of the most pressing strategic challenges in both defense and commercial settings, risking major disruptions to civilian and military operations. Quantum navigation promises a robust and reliable GPS backup that cannot be jammed or spoofed.
Q-CTRL’s navigation capability is urgently needed in contested maritime environments, as instances of spoofed signals caused significant disruptions to ships in the Middle East waterways as recently as June 23. This causes not only critical logistical issues but disrupts collision avoidance efforts, revealing major safety implications.
In quantum gravimetric navigation, the quantum gravimeter continuously “sees” the otherwise invisible hills and valleys in Earth’s gravity, allowing a navigation computer to compare its observations against known gravity maps. This is similar to orienteering, where one can position oneself on a map by identifying landmarks like valleys, mountains, rivers, or roads. GPS is not needed, making it a robust backup in contested regions.
Q-CTRL’s demonstration with the Royal Australian Navy departs from most previous quantum sensing field trials in that these tests mandated peak performance with full autonomy and without the addition of any special infrastructure. The sensor had to operate as a real navigation system would operate during a defense mission.
The ship’s motion and engine vibrations were sufficient to cause total loss of signal using conventional operating techniques typically employed in research experiments. To address these losses, Q-CTRL’s software-ruggedization strategies recovered operation even while MV Sycamore was underway.
Quantum sensing leverages the physics of light and matter on the smallest scales to enable the detection of tiny signals. Because these devices work based on the fundamental laws of physics and are not affected by drift like other GPS alternatives, their outputs do not change over time, enabling new opportunities where long-term stability is essential. Generally, however, these devices are significantly degraded when taken from a research laboratory into the real world, an issue addressed by Q-CTRL’s software-ruggedization technology.
For more on Q-CTRL’s software-ruggedized quantum sensing technology, read their peer-reviewed technical demonstration published in Nature.
As GNSS denial, jamming and spoofing threaten aviation safety, SandboxAQ and Acubed, the Silicon Valley innovation center for Airbus, have released real-world test results from a five-month, nationwide projectdesigned to test the accuracy of AQNav.
AQNav is an artificial intelligence-driven magnetic navigation (MagNav) system. AQNav uses advanced quantum magnometers to read Earth’s crustal magnetic anomalies, like a geoohysical fingerprint, then employs large quantitative models (LQMs) to filter out electromagnetic interference and precisely determine an aircraft’s position without relying on satellite signals.
These new results come from a nationwide initiative with Acubed’s Flight Lab to test the navigational accuracy of AQNav. Meeting the aviation industry’s Required Navigation Performance (RNP) standards is necessary for deploying the system on military, commercial and civilian aircraft.
AQNav’s performance was tested under various opertional scenarios and demonstrated advanced precision, accoding to SandboxAQ. The goal was to determine whether magnetic anomaly-aided navigation could broadly meet navigation requirements for commercial aircraft. AQNav’s capabilities exceeded the accuracy required for en route travel between airports — even on the program’s longest flight.
Accuracy
RNP Standard
Required Accuracy (meters)
% of Flight Time Met
RNP 0.3
550
64%
RNP 1
1,852
95%
RNP 2
3,704
100%
To demonstrate how the real-time capable system would operate in real-world conditions, flight data was collected, reprocessed, and streamed in real time to produce statistical insights, offering representative capability data for joint team evaluation.
Real-World Impact
SandboxAQ and Acubed focused on designing tests to mirror authentic, real-world aviation scenarios. For example:
Standard aircraft platform: AQNav was tested using publicly available magnetic maps aboard a standard Beechcraft Baron 58 – rather than a compensated geosurvey platform. This aircraft was modified only to accommodate the additional AQNav instrumentation – no extensive electromagnetic shielding or specialized noise isolation were used. All sensors were positioned inside the aircraft, powered by AQNav’s software to deliver a clean magnetic signal.
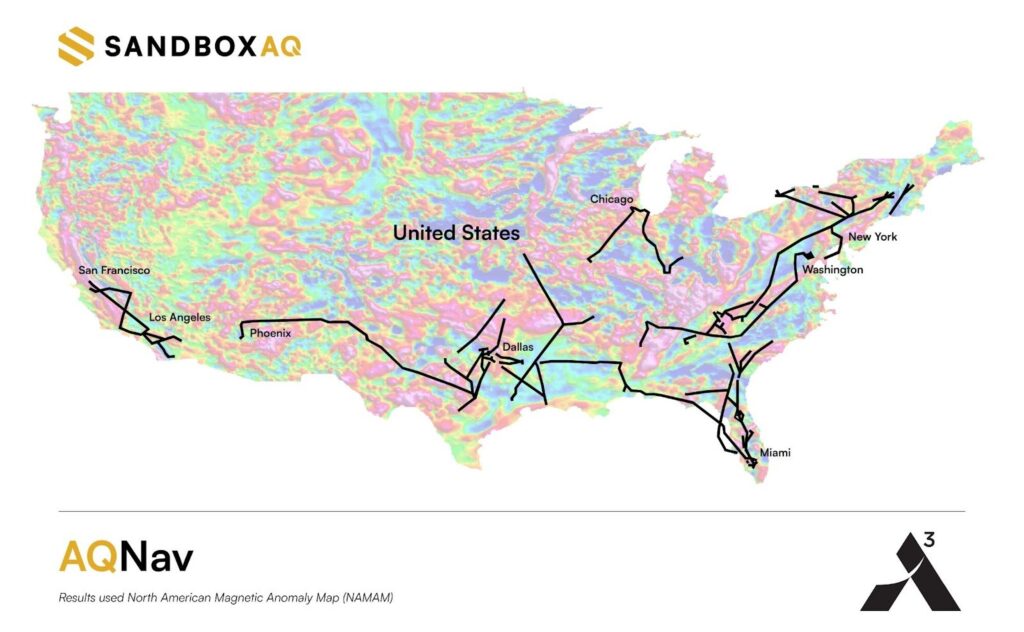
Use of apublicly available map. For all flights, AQNav researchers used the publicly available North American Magnetic Anomaly Map (NAMAM), which covers the U.S., Canada, parts of Mexico and surrounding oceanic regions.
Unfiltered flight paths: Flight operations spanned diverse, operationally relevant routes between 200 airports across the entire continental U.S. (Fig. 1), without filtering based on magnetic anomaly strength, magnetic map quality, or favorable geomagnetic gradients. More than 150 hours of flight data was collected.
Diverse geophysical environments: Data was collected over a full range of conditions, from magnetically-rich mountains to sparsely featured plains, reflecting real-world geographies where aircraft might operate without GNSS.
True operational noise: Onboard, AQNav successfully filtered out the real-world interference generated by the aircraft, including electromagnetic, vibrational and other airframe-induced noise.
Fig. 1: Acubed Flights with AQNav (Credit: AQNav
Elijha Williams, AQNav’s technical engagement manager, said: “Our campaign was not about demonstrating proof of concept performance under ideal conditions, it was about proving AQNav’s viability under the noisy, messy, and unpredictable environments real pilots face every day.”
During test flights exceeding two hours, AQNav outperformed the Inertial Navigation System (INS) without GNSS 100% of the time. During a one-hour flight over the challenging mountainous and forested terrain of California, AQNav achieved its best-observed accuracy of less than 74 meters, or roughly two-thirds the length of an American football field.
Precision, Scale and Autonomy for the Future
This campaign marks a significant step toward widespread adoption of AQNav in aviation. By consistently maintaining accuracy in an uncontrolled, national testbed, SandboxAQ demonstrated AQNav’s operational robustness under real-world conditions.
Andrew Sosa Sosanya, a quantum navigation machine learning engineer at SandboxAQ, highlighted the impact of the data collected: “Thanks to Acubed, the U.S. Air Force, and other partners, we’ve accumulated a highly relevant MagNav dataset. This creates a flywheel effect—the more data we gather, the faster we can improve model accuracy across diverse mission profiles.”
AQNav is also undergoing testing with Boeing, a U.S.-allied air force, and as part of NATO’s 2025 DIANA cohort.
Alpha Unmanned Systems (Alpha) in Madrid, Spain, has been developing and building helicopter UAVs for 10 years and has successfully employed them with defense departments in 10 countries. Its UAVs are ruggedized and qualified for the harsh conditions encountered at sea. The fully autonomous A800 and more recent A900 model UAVs have been used in military applications such as border patrol, situation awareness, intelligence gathering, coast guard support and aerial helicopter target simulation. Commercial applications include fishing fleets and oil rig support.
Alpha A900 approaches for deck landing. (Credit: Alpha)
The helicopter UAVs are equipped with a GNSS/MEMS autopilot system that maintains navigation if GNSS is jammed. MEMS sensors, however, can experience significant drift over time. The Alpha model offers two additional backup solutions. With an advanced air data system and pitot sensors, the aircraft can estimate airspeed and wind velocity to help maintain its flight path. If attitude estimation degrades further, remote pilot judgment may be required to recover control. For ground operations, a visual navigation system with a downward-looking camera can record terrain during overflights, building a database that enables navigation in GNSS-denied environments.
One of the newer capabilities Alpha has added includes an Automatic Identification System (AIS) receiver. AIS is a primary radar transponder system used by ships around the world to provide each other with tracking information on other ships that are within about a 30-mile range. With an AIS receiver onboard the UAS surveillance helicopter, ships that are out of visual range, maybe out close to the horizon, now become trackable.
Alpha is a small company that has been in operation since 2014, and it is one of the first to design helicopter UAVs for rough weather and at-sea environments. It’s good to see a focused, supportive outfit gradually succeed, not only with European defense organizations, but also in the U.S. and around the world.
Meanwhile, in a universe that’s not far, far away — in fact, in our solar system — plans are moving forward at NASA to visit Titan with a UAV. Titan is a moon of Saturn that is most favored to have the capability to start, and maybe support, life. Numerous organic compounds have been detected during earlier satellite visits. But this is no ordinary UAV, quite unlike Ingenuity, the solar-powered hopper that NASA flew 72 times on Mars.
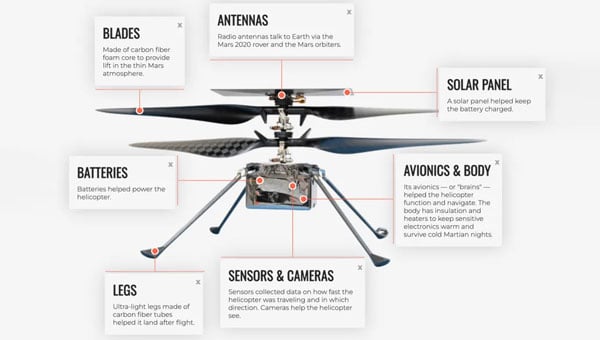
Ingenuity, a UAV that flew 72 times on Mars. (Credit: NASA)
NASA’s Ingenuity helicopter, which traveled to Mars attached to the Perseverance rover, was designed to demonstrate powered flight in the Red Planet’s thin atmosphere. Ingenuity featured oversized rotor blades to generate enough lift and was built to be as lightweight as possible. Its only equipment was a camera and speed sensors, with no scientific instruments aboard.
The helicopter performed flights over Jezero Crater, ultimately spending about 130 minutes aloft and covering 11 miles during 72 flights. Ingenuity’s mission came to an end after it sustained damage to a rotor during a hard landing, grounding the aircraft and concluding its operations on Mars.
The next interplanetary unmanned flying system is significantly more complex, replacing the lander and drone approach used on the Red Planet with a complete vehicle capable of flying and conducting the necessary investigative science. With a budget of $3.35 billion, NASA’s work has been underway since 2024, led by John Hopkins Applied Physics Lab, and a host of main and supporting organizations, including Lockheed Martin Space, Malin Space Science Systems (cameras), Honeybee Robotics (Blue Origin subsidiary, moon lander development) and participation by agencies in France, Germany and Japan. While Ingenuity was developed and built by UAV manufacturer AeroVironment with management/support from NASA/Jet Propulsion Labs (JPL), the team for Dragonfly appears to have a few industrial partners and extensive government support – hopefully, this works out!
Powered by a Radioisotope Thermoelectric Generator (RTG), Dragonfly has four sets of double rotors, landing skids, and, of course, has to be fully autonomous – the radio transit time between Titan and Earth is between 1 hour 10 minutes and 1 hour 40 minutes. Titan’s night is eight Earth days long, so the idea is to fly during the day (throughout 15 Earth days), then land and recharge batteries, and receive NASA’s instructions for the following day’s activities during the long night. The atmosphere is thought to be substantially composed of nitrogen and methane, four times thicker than Earth’s, and gravity is about 1/7, so 4 ft props with enough lift and power could carry the 880 lb to 990 lb UAV up to 10 miles for each flight at altitudes of up to 12,000 ft. But when observing and imaging the terrain, we might guess it would probably mean mostly low-level flights.
Dragonfly Titan UAV explorer (Credit: NASA/Johns Hopkins APL/Steve Gribben)
At this weight, we are looking at something quite substantial to be flying around the anticipated sand dunes and frozen methane surface of Titan. Autonomous operations will need to be tight and safe for this big vehicle to operate and survive; it’s not exactly a small car, but quite substantial. Not to mention that landing will need to be somewhat delicate to protect the sensitive onboard instrumentation.
A spacecraft is scheduled to launch aboard a SpaceX Falcon Heavy in 2028, embarking on a complex journey that includes a flyby of Venus and a gravity-assist maneuver past Earth to set a direct course for Saturn’s moon Titan. The probe is set to enter Titan’s dense atmosphere directly, protected by a heat shield. After initial deceleration from atmospheric drag, two drogue parachutes will deploy, followed by a powered descent to the equatorial region known as the Shangri-La dune fields.
The voyage is expected to take six years, with arrival at Titan in 2038. Once on the surface, the Dragonfly mission will begin a 2.7-year exploration of the moon.
An interesting initial glimpse into a future, really advanced drone are undertaking. Hopefully, NASA will keep to its schedule, the budget holds up, and we start to see hardware in the next few years. Meanwhile, Alpha could be on version 16 of its UAV helicopter by then and achieve massive success with its multi-mission UAV applications.
Qascom S.R.L. (IT) has successfully delivered the final presentation of the NAVISP-EL2-081 – MOOD (Moon testbed) project, marking the culmination of a multi-year effort to develop a cutting-edge GNSS simulation testbed for lunar, cislunar and space-based PNT applications.
For this purpose, Qascom upgraded its QA707 GNSS simulator introducing advanced features such as lunar-specific ranging strategies, support for multiple coordinate reference systems, custom signal transmitters (including LunaNet AFS), and a 3D Viewer for real-time scenario visualization. It also integrates BeiDou B1C signal simulation and dual-frequency RF streaming capabilities.
Key achievements include successful validation of LunaNet and BeiDou signals, implementation of Moon Principal Axis (Moon-PA) ranging, and integration with open-source and COTS receivers. The simulator has already supported the project NAVISP-EL1-062 – DEMOS-1(Lunar Surface PNT Beacon Demonstrator) and is now Qascom’s flagship GNSS simulation product.
The project was supported through NAVISP Element 2 for PNT competitiveness for European industry. The slides of this final presentation can be found here.
The U.S. Space Force’s Space Operations Command has accepted a modernized operating system for GPS, designed to maintain the resiliency of the constellation and enhance positioning, navigation and timing (PNT) services to meet evolving user demands.
The GPS Next Generation Operational Control System (OCX) upgrade is part of a broader set of Space Systems Command acquisition programs designed to deliver a range of modernized capabilities across the GPS III enterprise. In addition to OCX, these programs include the GPS III/IIIF satellite vehicles and Military GPS User Equipment.
The modernization effort is expected to improve signal access in electronically contested environments, increase the system’s ability to detect failures, enhance position and time transfer accuracy, and strengthen the integrity and uninterrupted availability of the Military Code.
“One of our missions is to deliver sustained, reliable GPS capabilities to America’s warfighters, our allies, and civilian users,” said Cordell DeLaPena, program executive officer for military communications and PNT at Space Systems Command. “The current enterprise modernization efforts underway give users confidence that GPS will continue to provide worldwide premier PNT service.”
Mission Delta 31, in partnership with Space Systems Command, developed a systematic process involving transition exercises, rehearsals and constellation transfer trials to verify the system’s integrity and capability prior to full transfer, according to Col. Stephen Hobbs, commander of Mission Delta 31. Hobbs added that risk reduction activities are underway to demonstrate OCX’s ability to integrate with existing, on-orbit GPS satellites.
Raytheon initiated the delivery of OCX to the U.S. government with the submission of the Department of Defense Form 250 on July 1, 2025. Following acceptance, Mission Delta 31 will continue integrated systems testing, operational readiness exercises and preparations for the eventual transfer of the GPS constellation to the new system.
“Testing and transition events will continue until the system is ready to transfer to operations, which is expected in late 2025,” said Hobbs. “Technology in space is advancing at lightning speed, with many new players from around the world. To continue providing reliable GPS for everyone, from your smartphone map to critical military operations, innovation is vital. Modernizing GPS is key in maintaining this essential service and remaining a leader in Space.”
CHC Navigation (CHCNAV) has released the AU20 MMS, a vehicle-mounted mobile mapping system designed for accurate and efficient collection of 3D spatial data. The system combines high-performance lidar technology, versatile sensor support and intelligent data processing to provide a practical and flexible solution for professionals in road surveying, asset management and infrastructure documentation.
The AU20 MMS features a sophisticated lidar system that uses fourth-generation real-time waveform processing technology. It achieves a scan rate of 2 million points per second and 200 revolutions per second, producing point cloud data with 5 mm accuracy and 3 mm precision. This level of detail allows for the identification of fine surface characteristics and features, supporting comprehensive asset inventories and condition assessments. The system’s long-range, multi-cycle laser technology enables high-density data capture up to 250 m in vehicle-mounted applications.
Built on the adaptable AP7 vehicle platform, the AU20 MMS supports a dual laser scanner setup to increase data density. The platform includes a 45° scanning angle to reduce data shadows and improve detection of vertical structures and road signage. The AP7’s built-in processor allows integration of up to eight external sensors, including specialized pavement detection cameras and panoramic cameras such as the Ladybug5+ and Ladybug6, giving users flexibility in data acquisition strategies.
The AU20 MMS uses artificial intelligence-based algorithms to refine data quality and streamline processing. AI-driven vehicle motion trajectory adjustment automatically identifies control points, correcting point cloud inaccuracies to within two centimeters to meet highway-grade survey requirements. AI-powered panoramic coloring achieves more than 95 percent accuracy in recognizing and handling vehicles and pedestrians, resulting in clean, interference-minimized colorized point clouds with efficient one-click optimization.
CHCNAV’s software suite, CoPre and CoProcess, streamlines workflows through intelligent automation. CoPre optimizes data preprocessing, allowing real-time adjustments to point clouds and imagery while minimizing manual intervention. CoProcess uses AI algorithms for feature extraction, including road assets, terrain models and building structures, to accelerate project delivery.
One of the most persistent sources of GNSS error — ionospheric delay — has been challenging to correct in real time, especially for mass-market devices. While dual-frequency receivers and commercial correction services can mostly mitigate this issue, they remain too costly and impractical for the billions of smartphones and IoT devices that rely on single-frequency GNSS. Even for dual-frequency systems, the commonly used ionosphere-free linear combination amplifies multipath and receiver errors and reduces data redundancy — yielding only two usable combinations from four original measurements.
This landscape may be shifting with the introduction of GloTEC, a real-time global Total Electron Content (TEC) map from NOAA’s Space Weather Prediction Center (SWPC), released in February 2025. GloTEC assimilates both ground- and space-based observations to provide real-time global ionospheric corrections without relying on error-prone linear combinations.
Unlike coarse models such as the broadcast Klobuchar algorithm or forecast-only products such as the predicted IGS Global Ionosphere Maps, GloTEC updates every 10 minutes using real-time measurements. This high refresh rate establishes a new benchmark for open-access ionospheric nowcasting in GNSS applications.
Originally designed to monitor and mitigate space weather impacts on aviation and communications, GloTEC may also deliver a broader benefit: enabling precise, scalable GNSS corrections for low-cost, single-frequency devices, making high-accuracy positioning more accessible and democratic.
Why Nowcasting Matters for GNSS
The GNSS community has long had to choose between accuracy and latency. Predictive models, such as those from NASA CEDIS or CODETEC, can offer reasonable approximations but may fall short when real-time corrections are required, particularly in the context of navigation, asset tracking or autonomous systems.
Post-processed products (such as rapid/final IGS GIMs) provide excellent fidelity but are typically delayed by hours, days, or even weeks. This makes them useful for research or auditing, but not for real-time navigation needs.
Commercial correction services, such as Trimble RTX and Hexagon’s TerraStar, have filled the gap for high-value applications. These systems interpolate ionospheric corrections in real time, but at a significant cost and they typically require specialized GNSS receivers.
GloTEC bridges this gap by delivering a publicly accessible, high-refresh ionospheric product that can support near real-time corrections. Updated every 10 minutes with a 2.5° latitude and 5° longitude spatial resolution, GloTEC represents a major step forward for public sector GNSS capability, particularly in contexts where accuracy, reliability and scale are all crucial. The data has also been supporting the United States Space Force and is accessible through their Unified Data Library (UDL).
Technical Approach: Adapting GloTEC for Practical Use
While the potential of GloTEC is exciting, turning it into usable corrections for consumer-grade devices isn’t straightforward. TEC maps represent volumetric electron density, while most mass-market GNSS chipsets, especially in smartphones, expect simplified models, such as the eight-parameter Klobuchar model broadcast by GPS satellites. GloTEC is a three-dimensional data assimilation system that uses a Gauss-Markov Kalman Filter to estimate electron density in the ionosphere. It ingests slant TEC measurements from ground-based GNSS receivers and space-based radio occultation data, using the IRI-2016 model as its background state.
To bridge this mismatch, Zephr’s team has been exploring regional fitting techniques, whereby a local subset of GloTEC data is used to generate custom Klobuchar coefficients. These can be transmitted to devices via standardized protocols, such as the LTE Positioning Protocol (LPP), enabling improved ionospheric delay estimation with minimal changes to device-side computation. Even with a regionalized Klobuchar fit and LPP encoding, there is still the problem of accessing the GNSS chip to apply the corrections. To solve this problem, Zephr has created a virtualized positioning engine that takes the raw GNSS measurements from the chip and provides a purely software-based solver. This approach allows the team to implement a variety of more advanced positioning techniques using commodity hardware such as smartphones.
Field Testing: A Quantitative Step Forward
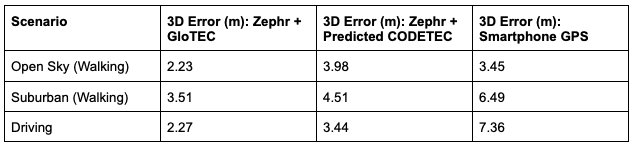
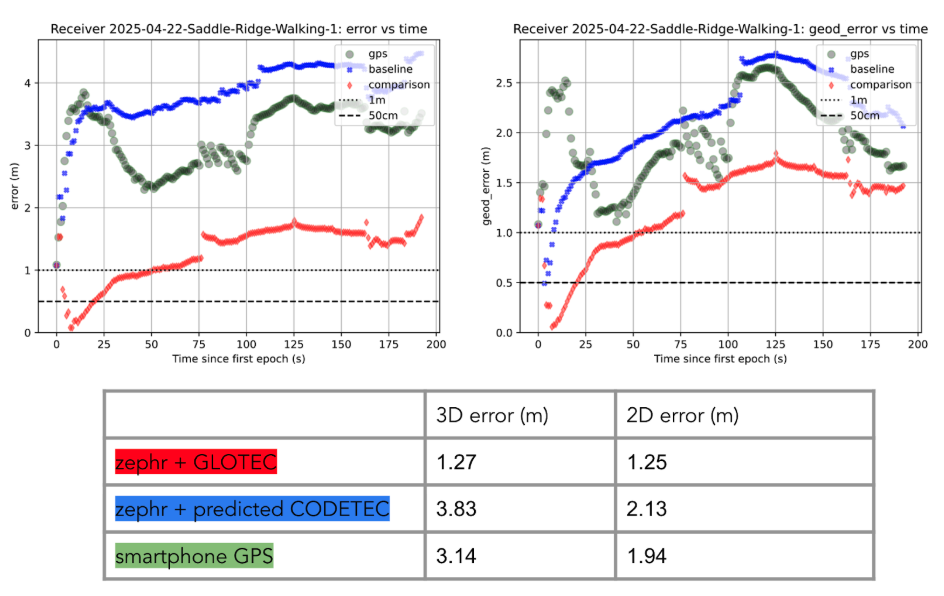
To evaluate the efficacy of GloTEC in improving GNSS accuracy, engineers at Zephr used the virtualized positioning engine to conduct 51 real-world campaigns across various conditions – including urban, suburban, static, walking, and driving – using a Pixel 8 smartphone and an RTK unit for ground truth.
The results were promising, as shown in Figure 1:
Figure 1: GloTEC vs. CODETEC vs. Android Native across multiple scenarios. (All figures provided by author)
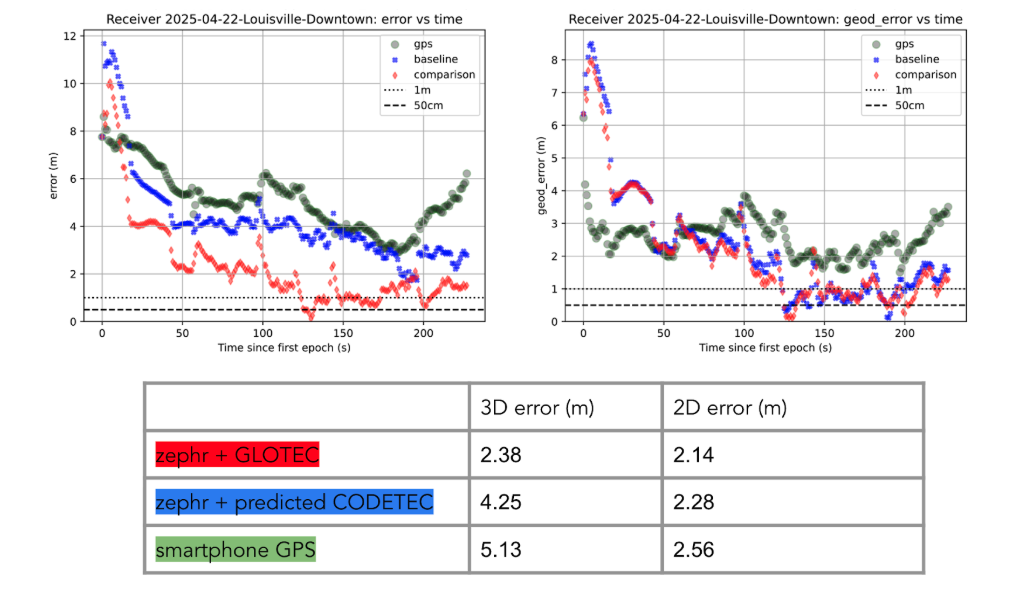
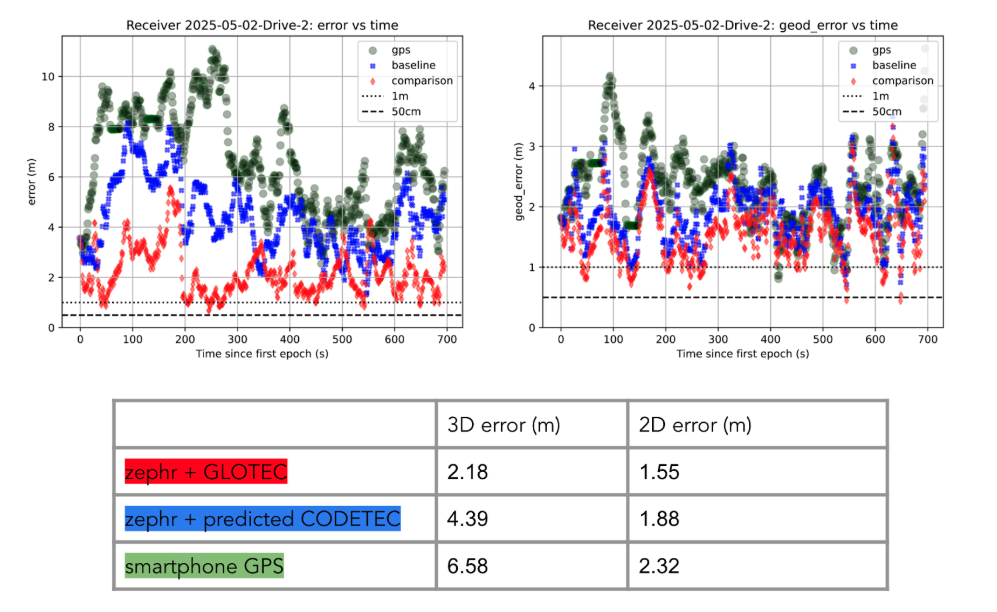
We can break down these results using detailed graphs for each scenario as examples. This will provide a more in-depth look at the positioning for specific traces through the outlined scenarios in Figure 2, Figure 3 and Figure 4:
Figure 2: GloTEC vs. CODETEC vs. Android Native for an open sky walking scenario
Figure 3: GloTEC vs. CODETEC vs. Android Native for a suburban downtown walking scenario.Figure 4: GloTEC vs. CODETEC vs. Android Native for a mixed sky driving test.
Across all categories, the GloTEC-based regional fitting approach significantly outperformed both the default GNSS solution (which uses broadcast data plus a Klobuchar mode) and the competing IGS products. Accuracy improved by up to 69% in driving scenarios and 46% in walking scenarios, compared to standard smartphone GPS.
While the Pixel 8 used in testing supports dual-frequency GNSS, smartphones face several practical limitations that hinder effective use of ionosphere-free dual-frequency combinations. These include limited signal availability (due to antenna constraints, L1/L5 support gaps, and partial constellation coverage), elevated multipath and noise (especially from omnidirectional antennas in dynamic conditions), and unstable clock biases that complicate error modeling. In fact, iono-free combinations can amplify multipath effects, potentially degrading accuracy in some conditions.
Despite these constraints, the results show that meaningful improvements in positioning are possible using a software-based approach with publicly available corrections. GloTEC, when paired with cooperative or cloud-based GNSS engines, offers a substantial step forward without requiring expensive commercial correction services or specialized hardware.
Broader Implications and Next Steps
While these results are promising, several challenges remain before GloTEC-based corrections can be broadly deployed:
Connectivity Requirements: Real-time access to GloTEC requires periodic downloads over cellular or Wi-Fi connections, raising questions about reliability in low-bandwidth or disconnected environments.
Global Calibration: The accuracy of regional fitting depends on local coverage density and VTEC variability. Further tuning may be needed in equatorial or polar regions, where ionospheric behavior is more volatile.
Nevertheless, the availability of GloTEC marks a significant milestone. For the first time, a free, real-time, high-resolution ionospheric correction product is accessible to developers, researchers, and engineers seeking to improve GNSS accuracy at scale. NOAA SWPC has plans to integrate more low-latency space-based and ground-based data into GloTEC in the near future. The new version of the model outputs will be released to the public once the results are validated. As techniques for applying it to mobile and IoT devices mature, the GNSS community may see a broad shift toward more precise, resilient, and cost-effective positioning systems.
GloTEC may have been designed to help forecasters monitor the response of the ionosphere due to space weather events, but its potential to provide an advanced tool for positioning on Earth is just beginning to be understood. In a world where nearly every mobile application depends on location, and where the cost of poor accuracy is rising (from package delivery failures to navigation errors), this kind of public infrastructure is invaluable.
Researchers and industry developers alike should explore how this NOAA capability can be integrated into their positioning systems. If properly supported, GloTEC could become one of the most impactful GNSS innovations of the decade.
Septentrio, part of Hexagon, has added the onocoy GNSS correction service to its Agnostic Corrections Partner Program. The program is designed to give users the ability to select from multiple high-accuracy correction services, supporting a range of application needs and geographic requirements.
The onocoy service operates as a decentralized, crowdfunded RTK network, providing reliable and cost-effective high-accuracy positioning. This approach is intended to benefit sectors such as agriculture, mining, drone operations, robotics, autonomous vehicles, geodesy and more.
Onocoy operates a community-driven GNSS RTK network powered by Web3 and blockchain technology, to offer secure, transparent and efficient data sharing and transactions, according to the company. Although privately operated, this network actively monitors its base stations to maintain service reliability and quality. Onocoy is joining Septentrio’s Agnostic Corrections Partner Program, which already includes several leading correction services such as GEODNET‘s RTK Service and Swift Navigation’s Skylark Precise Positioning Service.
The Netherlands Ministry of Defence has procured eight V-BAT unmanned aircraft systems from Shield AI to enhance maritime intelligence, surveillance and reconnaissance (ISR) operations for the Royal Netherlands Navy and Marine Corps.
The deal was publicly announced at the “Maritime Uncrewed” event hosted by the Royal Netherlands Navy in Den Helder, where officials highlighted the V-BAT acquisition as part of a broader effort to modernize the force.
The navy’s decision was informed in part by V-BAT’s demonstrated success in Ukraine, where the platform is executing long-range, long-endurance ISR and targeting with independence from GNSS.
According to Shield AI, the decision to procure V-BAT reflects a push to field battle-proven, autonomy-enabled systems capable of operating in contested environments and without reliance on GNSS for navigation or mission execution.
The navy’s decision was informed in part by V-BAT’s demonstrated success in Ukraine, where the platform is executing long-range, long-endurance ISR and targeting with independence from GNSS. V-BAT also conducted a successful month-long flight trial during NATO’s REPMUS 2024 exercise, where V-BAT conducted maritime ISR operations aboard the HNLMS Johan de Witt. That event helped validate the system’s shipboard performance and informed the Dutch Ministry’s decision-making process.
The V-BAT is a single-engine ducted-fan vertical takeoff and landing (VTOL) unmanned aircraft system operationally deployed across multiple regions worldwide. Its compact footprint and ability to launch and recover in confined spaces make it suitable for shipborne and austere environments, ensuring flexibility and resilience in complex missions.
V-BAT has operated in GPS-denied and comms-contested environments. Its proven performance in regions like Ukraine, the Black Sea, and the Indo-Pacific demonstrates its ability to withstand advanced electronic warfare threats that have grounded many traditional drones.