The European Commission is considering a requirement for mobile phones, and perhaps other portable devices such as tablets, to be equipped with Galileo receivers that would automatically send location data as part of any emergency call to 112.
E112 is a location-enhanced version of the 112 universal European emergency services number via telephone, equivalent to 911 in the United States, in which the telecoms operator receiving the call for help transmits location information to the emergency dispatch center, which has further connection to police, firefighters, medical, and other emergency services.
A European Union Directive on E112 requires all mobile phone networks to provide emergency services with available information on the location of the caller. Currently this data is the cell id, which is of limited use in localising a call as, for example, in rural areas where the mobile cell may have a radius of two to twenty kilometres — not very helpful for police or medical emergency crews in finding someone in distress.
Whether the Commission (EC) should mandate Galileo, or take a different option, is currently the subject of consultation. The EC convoked a public hearing in Brussels in May to chew over the pros and cons.
Legal Obligation
The Commission has a legal obligation to look at potential activities that can maximise the societal benefits of Europe’s huge investment in satellite navigation technologies such as Galileo and EGNOS. It is also tasked to assess how these technologies could reinforce Europe’s economic infrastructure. To me, the E112 mandate is a low-hanging fruit ready to be picked, and the majority of stakeholders who voiced an opinion at the hearing evinced great enthusiasm for the proposal.
Interestingly, the regulatory route to achieve a mandated use of Galileo for E112 would be via a delegated act; the relevant radio equipment and telecommunication directives are already effectively in place. This means that if the Commission decides to mandate, it can do so without the need for further regulation.
Mandating a specific GNSS system for a regional service of this type is not a new idea. Russia and China have both done so. As Richard Catmur of Spirent Communications put it: “We are not seeing Galileo being pushed like GLONASS and Beidou in the market. We need input from this forum.”
Justyna Redelkiewicz of the European GNSS Agency (GSA) outlined some technical reasons for mandating Galileo. Over and above (yet to be fully proved) improved accuracy, availability. and a faster time to first fix, the likely inclusion of signal authentification in the Galileo open service would reduce any impact of spoofing — a very useful characteristic in what is essentially a safety-critical system.
Johannes Vallesverd, who chairs the group within the European Conference of Postal and Telecommunications Administrations, Electronic Communications Committee tasked with delivering harmonisation of the 112 number across Europe, was also very positive: “We need to talk about how we could be saving lives Europe.” He advocated a proactive and rapid decision.
This was reinforced by Gary Machado, CEO of the European Emergency Number Association (EENA). He estimated the annual economic cost of the delays induced by inaccurate location data at more than €4 billion across Europe. In contrast, the cost of implementing a system to relay GNSS location from equipped smart phones was of the order of €250 million. Economically, it is a no-brainer.
Bruno Gagnou from Thales Alenia also thought that GNSS — and specifically Galileo — gives the right answer for E112 positioning. “The technology is reliable and accurate,” he said, “with obvious benefits for society. Lives will be saved, the security of citizens enhanced due to quicker intervention, and European industry will be supported.” He noted that this was also the experience in the United States when the enhanced 911 regulation was introduced.
Gagnou thought that Galileo should be mandated in order to ensure a harmonised approach across Europe and avoid an anarchic, non-compliant deployment of technologies for E112. “EU emergency services should rely on EU technology,” he concluded. “EU citizens deserve the best E112 emergency service.” Galileo should be favoured, all mobile devices should be addressed, but this will require mandating. It seems to me that the Commission will agree with him.
Quantum Navigation: Ultra-Cold Alternative to GNSS?
Some potential future tech! The Quantum Timing, Navigation and Sensing Showcase at the UK’s National Physical Laboratory (NPL) in mid-May highlighted the possible use of quantum technology for highly accurate timekeeping and advanced, GNSS-independent, navigation. This so-called second quantum revolution’\ could make a big impact on the field of Timing, Navigation and Sensing (TNS) through technology based on ultra-cold, laser-cooled atoms.
The meeting was organised by the UK’s Defence Science and Technology Laboratory (DSTL). It presented a number of research projects including a table-top quantum accelerometer designed to provide ultra-precise, highly reliable positional data for submerged submarines.
As we know, GNSS does not work well underwater, so submarines navigate using accelerometers to register every twist and turn of the submerged vessel relative to its last surface GNSS fix.
“Today, if a submarine goes a day without a GPS fix, we’ll have a navigation drift of the order of a kilometre when it surfaces,” said Neil Stansfield of DSTL. “A quantum accelerometer will reduce that to just one metre.”
Once chilled to an ultra-cold state, the rubidium atoms in the accelerometer achieve a quantum state that is easily perturbed by an outside force. Another laser can then be used to track these perturbations and calculate the size of the outside force, and therefore the relative position.
At present, such devices are only found in the laboratory, but research is pushing past classical physical limits towards optimal performance, as scientists investigate miniaturisation and the potential use of new materials to reduce costs and increase the practicality of the devices. Following land trials in late 2015, it is anticipated that a sea-going version will be demonstrated in a British sub during 2016.
”The defence industry often acts as a pioneer in the development of new technologies. The potential benefits of a future in which we can navigate by inner space rather than outer space will impact both the military and civilian world,” commented Neil Stansfield.
Bob Cockshott from NPL said: “Whilst the most immediate applications are in the defence field, future quantum navigation technologies could also have significant civilian applications across a wide variety of activities, covering high frequency trading, network synchronisation, robust and ubiquitous navigation, geo-surveying, and mineral prospecting. With the first applications potentially ready for market in five years, now is the critical moment time to consider the opportunities provided by quantum.”
Cockshott points out that chip-scale atomic clocks using similar principles are here now from Microsemi in the United States — indeed, they have been integrated with GPS in some U.S. military applications — and can provide low-power, low-cost hold-over for timing applications. He expects to see European designs on the market within five years and a steady improvement in capability thereafter.
“Cold atom accelerometers may also appear in high-value (probably military) applications within five years. These could form the basis of a quantum compass,” he predicts .
GPS-like progression. He envisages something like the progression seen in GPS receivers from expensive military equipment to high-value professional users and then mass-market. DSTL and the UK’s Technology Strategy Board are working hard to get industrial suppliers of support equipment and of quantum devices working as quickly as possible to get these technologies to market, and consumer devices are certainly the ultimate aim.
“I would see these technologies as complements to GNSS, at least in the short and medium term, providing hold-over in poor GNSS environments (such as urban canyons etc) and capability where GNSS will never work — in tunnels, for example,” comments Cockshott.
Of course companies like Google would like to guide city dwellers through urban underground metro systems, switching seamlessly to GNSS when they step out into the open air. “The quantum compass will not of course provide position fixes, only information about positional changes from a known starting point,” he points out.
However, in the long term, such gravity sensors combined with detailed maps of the Earth’s gravitational field may be able to provide GNSS-free positioning and navigation. Militaries are interested in this option because there is no known physics that could jam or spoof such sensors. “But it’s hard to see them matching the precision available from GNSS,” he concludes.
Galileo First Fixers
The European Space Agency (ESA) handed out certificates to the first 50 global citizens to determine their position using only the Galileo system. They got responses from around the world.
While half the applications for certificates came from Galileo’s home continent, Europe, others first-fixers came from Australia to Canada, Egypt to Vietnam.
The first positioning fix using only Europe’s civil-owned navigation system took place at ESA’s Navigation Laboratory in Noordwijk, the Netherlands, on March 12,2013.
The Galileo team knew of fixes being performed on an informal basis, so to mark the anniversary of the first positioning fix they decided to issue commemorative certificates to groups who had picked up the signals to perform their own fixes. Teams were asked to include details of the receiver they used, the start and finish of the fixes in Universal Time Coordinated (UTC), and a plot of their latitude/longitude positioning overlaid on a map.
Italy turned out to be the single best represented country in Europe, with six separate fixes, followed closely by Germany and the UK with five each. Several groups had achieved fixes on the same day as ESA in 2013.
Most of the employed receivers were software-based radio systems, with signal processing performed by software on a computer linked to a radio-frequency front end. Professional receivers were also customised for the job.
“Most of the applications were obtained with static receivers and simple position fixes with Galileo’s Open Service signals,” explains Galileo engineer Gaetano Galluzzo.
Belgium’s Royal Military Academy performed Galileo’s first position fix at sea, aboard Belgian frigate Leopold-I, while sailing along the Norwegian coast.
A German telecom company made use of the satellite signals for timing and network synchronisation – one of the most important applications of Galileo will be as a nanosecond-scale time source, enabling the effective synching of financial, power and data networks around the globe.
Finally
Talking of fixes – has anyone heard anything from Galileo GSAT0104 recently? According to the European GNSS Service Centre, the fourth IOV satellite is “unavailable until further notice.” The setting of unavailability may be due to in-orbit validation testing, as the website implies may be the case, but no further official statement has appeared, nor active user notifications (NAGUs) at http://www.gsc-europa.eu/system-status/user-notifications.
There have been a number of NAGUs over the past couple of months concerning outages and, at different times, one or more of the Galileo satellites have been off line while this extended period of testing takes place.
The message to the recent European Space Solutions conference in Prague was simple enough: EGNOS is here, so let’s use it; Galileo is almost here, so let’s promote it.
Neither task is straightforward.
Take the European Geostationary Navigation Overlay Service (EGNOS), the European piece of a near-global network of terminals on geostationary satellites linked to networks of ground stations to verify GPS signal accuracy, primarily for aviation but with further applications as well. Other pieces of this global network are the Wide Area Augmentation System (WAAS) in the United States, the System for Differential Corrections and Monitoring (SDCM) in Russia, GPS-aided GEO-augmented Navigation (GAGAN) in India, and Multi-functional Satellite Augmentation System (MSAS) in Japan.
EGNOS is operational. It works. Once airports publish the required specificafions for localizer performance with vertical guidance (LPVs), aircraft with EGNOS terminals ultimately will be able to use EGNOS for flight terminations up to as low as 200 feet above the runway. Gone is the need for runway infrastructure, and welcome to the long-promised world of satellite-based augmentation systems. “It offers cheap solutions for precision approach,” said Fabio Gamba, chief executive of the European Business Aviation Association.
In the United States, where business aviation is a bigger market than in Europe, some 3,400 LPVs have been published for 1,670 airports. In Europe, the equivalent figure is 108 LPVs at 77 airports.
Why the sluggish response? Gamba cited a long list of issues, including some that appeared more political than technical. Part of the reason, some said, was that the EGNOS backers, including the company under contract to manage the system — European Satellite Services Provider (ESSP) of Toulouse, France — have not done enough to get the word out.
After all, these observers said, EGNOS suffered multiple delays, and its bigger younger brother, Galileo, has had bad press for years as its business model, ownership, regulatory backing, and schedule took turns in making eyes roll in Europe.
But that’s yesterday’s issue. Thierry Racaud, chief executive of ESSP, said EGNOS posted greater than 99 percent availability in May for its safety-of-life service, which is currently available on none of the other regional GPS augmentation systems except WAAS.
Racaud promised that the 108 LPVs signed so far would grow to 180 by the end of this year, and that 200-foot level approaches would be certified by late 2015. He said he hoped all 28 member nations of the European Union would have concluded their EGNOS regulatory approvals by 2017 or 2018.
“What we need now is more users,” Racaud said.
If EGNOS is not well known on its home turf, imagine its status in Africa, where European companies are trying to sell its adoption. Abdel Nasser Saint’Anna, director of the EGNOS-Africa Joint Program Office, said Africa should be Exhibit A for an EGNOS success pitch. Of the 2,500 runways in Africa, he said, only 177 were equipped with instrument landing systems (ILS), the system EGNOS and Galileo ultimately would like to replace.
Galileo, with Four, in Fourth
Galileo, too, appears headed for a successful adoption in many areas around the world even if, once operational, it likely will be the fourth global GNSS system in place, after GPS, Russia’s GLONASS and China’s BeiDou — not counting the large regional Indian and Japanese systems now being developed.
For those with scorecards, recall that four Galileo satellites, designed to validate the system’s performance, are in orbit. Carlos des Dorides, director of the European GNSS Agency (GSA) in Prague, said tests in May proved Galileo’s interoperability with GPS.
More importantly, des Dorides said the tests demonstrated how much better it is for consumers when their terminals access GPS and Galileo together. That should be obvious. Less obvious: Results were much better than with terminals tracking both GPS and GLONASS, he said.
The more satellites, the better? Yes, at least up to a point. Whether terminal manufacturers will see fit to incorporate all four global GNSS constellations, plus one or two of the regionals, in their hardware remains to be seen.
But the pent-up demand for Galileo does now seem better than it was as little as a year ago, despite the fact that some Asian nations attending the conference said they need Galileo to demonstrate its vitality sooner rather than later. Some officials said signal-quality issues with Beidou, and the recent GLONASS outage, will more than make up for Galileo’s delays as long as deployment progress is visible.
The fact remains that by 2020 there will be more than 100 GNSS satellites in medium-Earth orbit, in addition to the augmentation terminals on geostationary satellites.
A graphic presented by SpaceTec Partners’ Rainer Horn, whose company has been charged with preparing the Asian market for Galileo, showed just how dense the Asian skies will be with GNSS assets at the end of the decade. India, China, Japan, Taiwan, and South Korea are SpaceTec’s current Asian targets.
The message from these markets: Launch Galileo now. Drum up support. Occupy the media space.
Did the European Commission get the message? Time will tell. The next opportunity to wave the Galileo flag comes in late August, when the first two of 22 full-operational-capability satelllites will be launched from Europe’s spaceport in South America. Two more are scheduled to follow late this year.
Eight satellites in orbit by Christmas will not make an operational service, whatever the brochures say. But does that matter? Galileo now has secure funding, through 2020, for most — not all — of what it needs to launch a full constellation. Absent a new issue, by 2017 few will remember the delays.
Paul Weissenberg of the European Commission, who has seen the Galileo wars up close, reminded the European Space Solutions audience in Prague that one future Galileo customer sits outside the commission’s offices, waiting for approval to use Galileo’s PRS encrypted service. The U.S. Defense Department’s desire for Galileo does not have an expiration date. Just launch it.
Potential GNSS Back-up Improves to GPS-Level Accuracy
A new enhanced differential Loran system demonstrates 5-meter accuracy not achievable by the current DLoran system, and requires less expensive reference stations. A prototype tested in Rotterdam’s Europort area uses standard mobile telecom networks and the Internet to reduce correction data latency — a key source of error — by one to two orders of magnitude.
By Durk van Willigen, René Kellenbach, Cees Dekker, and Wim van Buuren
For maritime applications, Loran is considered as the most promising backup for GNSS for situations where the use of navigation satellite signals is denied. For this reason, the Dutch Pilots’ Corporation askedReelektronika to investigate whether differential Loran could meet the Dutch Pilots’ 5-meter accuracy requirement for a harbor navigation system. This proved to be an enormous challenge, as preliminary tests showed that even 10 meters was difficult to achieve with differential Loran (DLoran) as promoted by Trinity House, the UK lighthouse authority. This led to a thorough renewed investigation of all possible error sources of a complete differential Loran system. The outcome of this research is very promising, as a couple of major error sources could be isolated. This made the complete system better understandable, so adequate countermeasures could be taken.
Loran History
The development of Loran-C started in the United States about fifty years ago. It is a terrestrial low-frequency (100 kHz) system organized as chains, each consisting of a master station with two or more secondary stations. Each station broadcasts in a strict time format series of 8 or 9 pulses of approximately 250 µs. The effective radiated power is in the range of 100 to 1,000 kW, depending on the required working range. These high powers are required by the high levels of atmospheric noise in the 100 kHz frequency band.
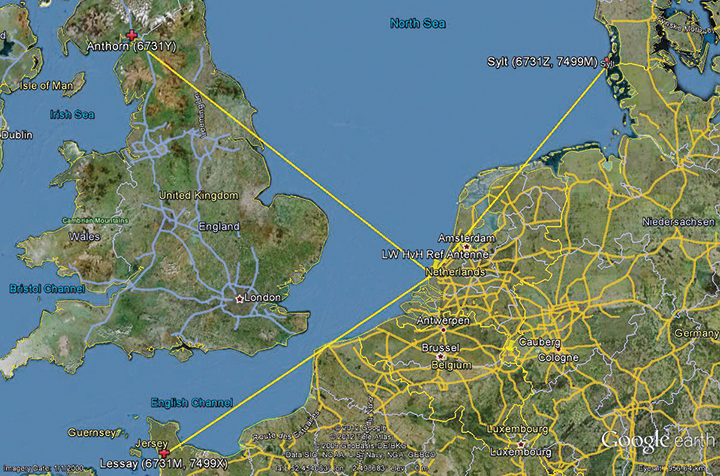
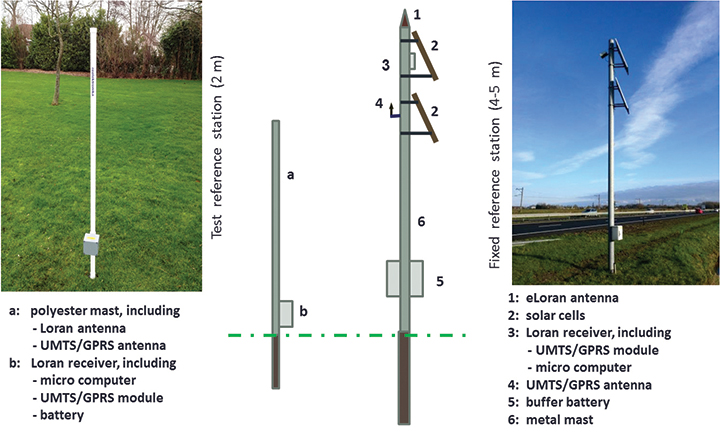
Figure 1 shows the test area of enhanced Differential Loran (eDLoran), using the Loran stations of Lessay (France), Sylt (Germany), and Anthorn (UK).
Figure 1. The Loran configuration in the test area of Europort.
Radiating such high-power pulses requires large vertical transmitting antennae of about 200 meters height (Figure 2). These high power levels have long been seen as a drawback of Loran-C. However, the upcoming GNSS interference risks changed this apparent drawback into an advantage, as jamming such high field strengths is hardly achievable unnoticed. Loran-C is, unfortunately, less accurate than GNSS but it is nearly impossible to jam over large areas. This is one of the major reasons that Loran gets so much renewed interest by all who face risks in life-critical and environment-critical applications of radio navigation.
Figure 2. Left, the antenna park of 13 masts of ≈200 meters at Anthorn, UK. Right, the 200-meter mast at Sylt, Germany.
Differential Loran
Standard Loran does not meet accuracy requirements for harbor entrance and approaches. The International Maritime Organization requires 10 meters (95 percent), which is at least 5 times more demanding than standard Loran can provide. So, differential techniques have been developed and implemented, which are comparable with differential GPS. Although the error sources of GPS and Loran are quite different, the major common error source in both systems is the lack of accurate propagation models.
Several years ago, the General Lighthouse Authorities (GLAs) of the UK and Ireland implemented Differential Loran (DLoran) in the test area around Harwich. DLoran is based on a Loran reference station in the area of interest which measures temporal deviations of the measured pseudoranges. These “errors” are then sent to the user receiver through the Eurofix Loran Data Channel. This technique strongly resembles that of differential GPS. Unfortunately, for a number of reasons it proved to be impossible to achieve absolute accuracies of better than 10 meters with DLoran.
This has led to a new research project to find a more accurate differential Loran technique. All possible error sources have been investigated again where possible, producing unexpected solutions regarding accuracy and cost.
Error Sources
The total position error of Loran depends on the accuracy in time of the high-power generated Loran pulses feeding the antenna, the stability of the physical phase center of the Loran transmitter antenna, stability of the tuning of the antenna circuit, the accuracy of the measured additional secondary phase factor stored in the Additional Secondary Factor (ASF)database, and the quality of the Loran receiver. ASF is the additional delay when Loran signals propagate over land with a varying conductivity. As the ASF data are not fixed but vary slightly over time, temporal de-correlation, differential techniques have been developed to counteract that effect. In standard DLoran systems, the differential corrections are sent to the user through the Eurofix data link. Particular error sources include:
Transmitter Timing Accuracy. A Loran transmitter sends about 100 pulses per second. Each station has three cesium clocks time-synchronized to Coordinated Universal Time (UTC) via a time-transfer network. A two-way satellite time-transfer system will make it simpler and more accurate.
Antenna Phase-Center Stability. Loran transmitter antennas are vertical towers approximately 200 meters high to provide vertical polarization. Its phase center, at the published position, does not move more than about 1 meter according to the station crew at Sylt.
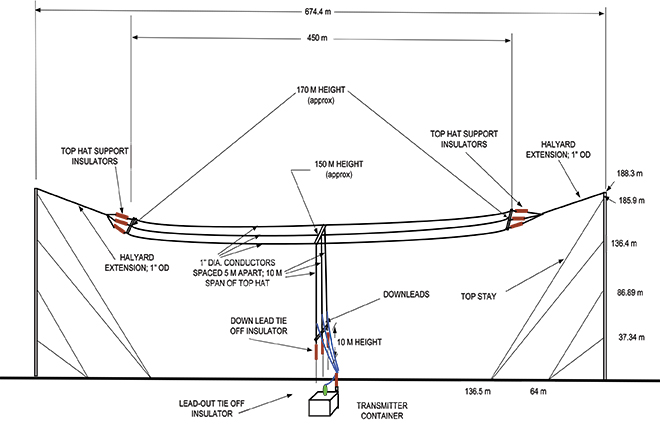
This situation is very different for a wire antenna as installed at the station at Anthorn in Northern England. The top-loaded wire antenna is installed between two towers 200 meters tall and separated by 675 meters (Figure 3). In stormy weather, the antenna position is not stable and does not continuously coincide within 1 meter of the published position of the antenna.
Figure 3. The enormous top-loaded Loran wire antenna at Anthorn. This type of antenna is not rigidly stable during storm. By courtesy of Babcock International Group.
ASF Data. The net travel time of the Loran signal from the transmitter to the receiver antenna is the sum of the propagation through the atmosphere (primary factor or PF), some extra delay due to traveling over seawater (secondary factor or SF), and finally ASF. The PF and SF are calculated from models, while the ASF must be measured. These calculations can only be accurate if the net travel time can be accurately determined and the distance between transmitter and receiver can be calculated with the help of GPS-RTK. The time stamps of the signal when leaving the antenna are not sufficiently accurate. The time stamps on the received signals are established by using a GPS-disciplined rubidium (Rb) clock. In conclusion, we cannot accurately measure and compute the absolute ASF values. All mentioned possible errors led to the use of differential techniques.
Differential Loran
As it is not possible to measure ASF data to sufficient accuracy, time-stamp errors at the transmitter can be circumvented by applying differential techniques over a limited area of interest. The receiver at the reference site and the rover receiver experience the same transmitter timing error, which makes it a common error and harmless in differential Loran. It is more difficult to cope with the offset of the Rb clocks at the reference and the rover sites, which is, unfortunately, not common-mode. Differential clock errors of a moving rover receiver may easily rise to 20 ns, equivalent to 6 meters. This type of error limits the achievable accuracy of an ASF data base.
The measured/calculated ASF data are due to weather effects on propagation slightly moving with time. That is the reason to use a reference receiver to measure these temporal variations and send these as AFS corrections to the rover receiver via the 30 bps Eurofix data link. Unfortunately, this rather slow data link introduces significant data latency, which turned out to be the source of significant differential Loran errors.
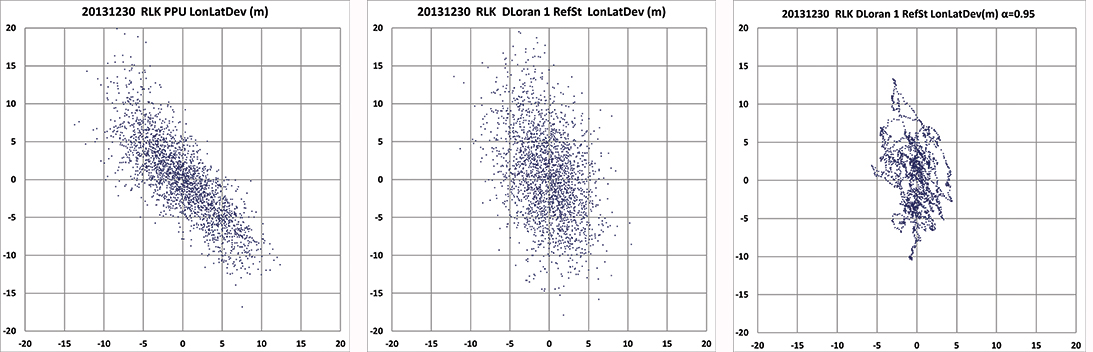
In the UK, many tests have been conducted to measure these ASF shifts and use the Eurofix data link for sending correction data to the user receiver. DLoran data are sent as pseudorange corrections per station. A complete set of DLoran correction data takes about 90 seconds. The UK plans to send correction data from multiple reference stations via a single Eurofix channel. The resulting very large data latency will preclude accuracies any better than 10 meters. The main reason of this conclusion was found by further analysis of measurements of the position of the rover receiver. These positions are shown as a scatter plot in Figure 4.
Figure 4. On the left the position deviation scatter plot at the rover receiver. The middle plot is the result after applying DLoran corrections from a reference station. The right plot of the same DLoran plot after being low-pass filtered indicating the slow moving of the phase center of the Anthorn transmitter. The axes are in meters.
The left-hand plot gives the position deviation of 2,500 independent measurements, where the scattering was thought to be caused by noise on the measurements. The middle plot is the result after being corrected by DLoran data with a 90-second data latency, which shows a somewhat modified form but still quite noisy plot. However, when the DLoran data were low-pass filtered, it appeared that often all separate measurements more or less formed lines, which would not happen with just atmospheric noise. Further, the scattering after filtering did not decrease much, which would happen if the disturbances were due to noise. See the right-hand plot in Figure 4.
This demonstrates that the source of the problem is the slow data rate through the Eurofix channel, in combination with the movements of the phase center of the transmitter antenna at Anthorn. Apparently, the solution had to be found in a much faster data link which could neither be offered by Eurofix (30 bps) nor by the U.S.-proposed OFDM technique with a data rate of approximately 1 kb/s. This unexpected result forced us to drastically change the concept of differential Loran to get much better accuracy results, as requested by the Rotterdam pilots.
Enhanced Differential Loran
The above mentioned difficulties with DLoran have led to a new concept of differential Loran which had to fulfil three important primary improvements. The first is a significant reduction in the latency of the data in the data channel; the second is that a large number of reference stations should be allowed to send correction data to the user without saturating the data channel. Finally, it is necessary to measure ASF data more accurately without being dependent on atomic clocks.
The simple conclusion was that Eurofix could not meet the first two improvements. As Eurofix is an invention of Delft University in the Netherlands, it was somewhat painful for the Dutch to admit that a much faster data link is absolutely needed to achieve a two-fold better differential Loran position accuracy. However, Eurofix is still the prime GNSS backup candidate for distributing accurate UTC over very large parts of Europe. Further, Eurofix has the capability to send short messages, which might be encrypted for secure communication purposes that might then form a terrestrial backup for Galileo PRS.
Finally, the third improvement to generate more accurate ASF data cannot be found on a pseudorange method but has to be established on position bases.
Instead of using the Eurofix channel, eDLoran uses the public Global System for Mobile (GSM) network to send the differential corrections to users. eDLoran receivers therefore contain a simple modem for connection to the GSM network. The eDLoran reference stations are also connected to the Internet, which may be implemented via a cabled access or also via a GSM modem.
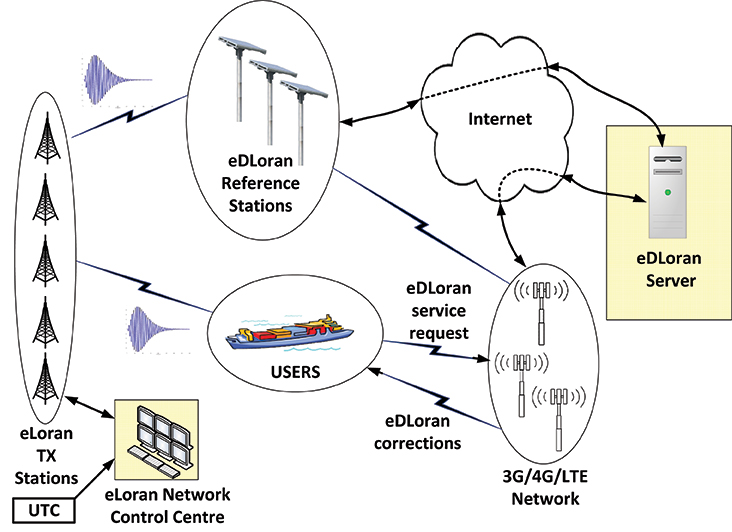
Fortunately, today many GSM networks are robust in respect of GPS outages. The eDLoran concept is quite simple and is shown in Figure 5.
Figure 5. Concept of eDLoran. By courtesy of Babcock International Group.
The eDLoran infrastructure is not connected with any Loran transmitter station and operates completely autonomously. An eDLoran reference station is connected to a central eDLoran server by its connection to the Internet.
The measured positions of these reference receivers are processed in the eDLoran server, which returns the resulting correction data to the user, also via the Internet. Data latency will be not more than 2 seconds. The rover receiver starts the entire process by sending the raw position to the server, which will then return the optimal ASF database for that particular area. Corrections can be calculated by using data from multiple reference stations. Reference stations for eDLoran are small and consume not more than 10 Watts. Two types of reference stations are under development. A portable simple battery-powered version, not larger than 2 meters, can operate for 8 hours. This version is meant to do interference analysis on selected candidate locations. For a permanent installation, a continuously operating solar-powered unit is also under development. See Figure 6.
Figure 6. Concepts of a mini reference station (left) and a permanent eDLoran reference station.
It has been mentioned that measuring accurately the departure and arrival times of Loran pulses is difficult. It is however needed in order to work out the ASF data on the pseudorange measurement for each Loran station in view. Therefore, a DLoran ASF measurement receiver concept uses Rb clocks and is relatively large and power-hungry. With eDLoran, position offsets due to ASF effects are measured and an eDLoran reference server outputs position- instead of pseudorange-corrections. Measuring positions is much simpler and more accurate and can be done with standard miniature low-power eLoran receivers. No GPS-disciplined Rb clock is needed, and total costs are significantly lower. The gain in accuracy of this simpler ASF measurement receiver together with the very low data latency is one of the reasons that the resulting eDLoran position accuracy is now approximately 5 meters instead of 10 meters with DLoran.
eDLoran Results
We conducted real-life static and dynamic tests to demonstrate the capabilities of this new concept. The static tests were done in post-processing with logged data from Hook of Holland and at Reelektronika, about 40 kilometers to the east. Only standard eLoran receivers, mostly equipped with E-field antennae, were used, and no atomic clocks were applied. At Reelektronika ,we used two 2-meter mini-reference stations, while in Hook of Holland the Loran antenna was mounted on top of the 30-meter lighthouse. Dynamic tests were done on board of the MS Polaris, the new pilot-station vessel of the Dutch Pilots’ Corporation.
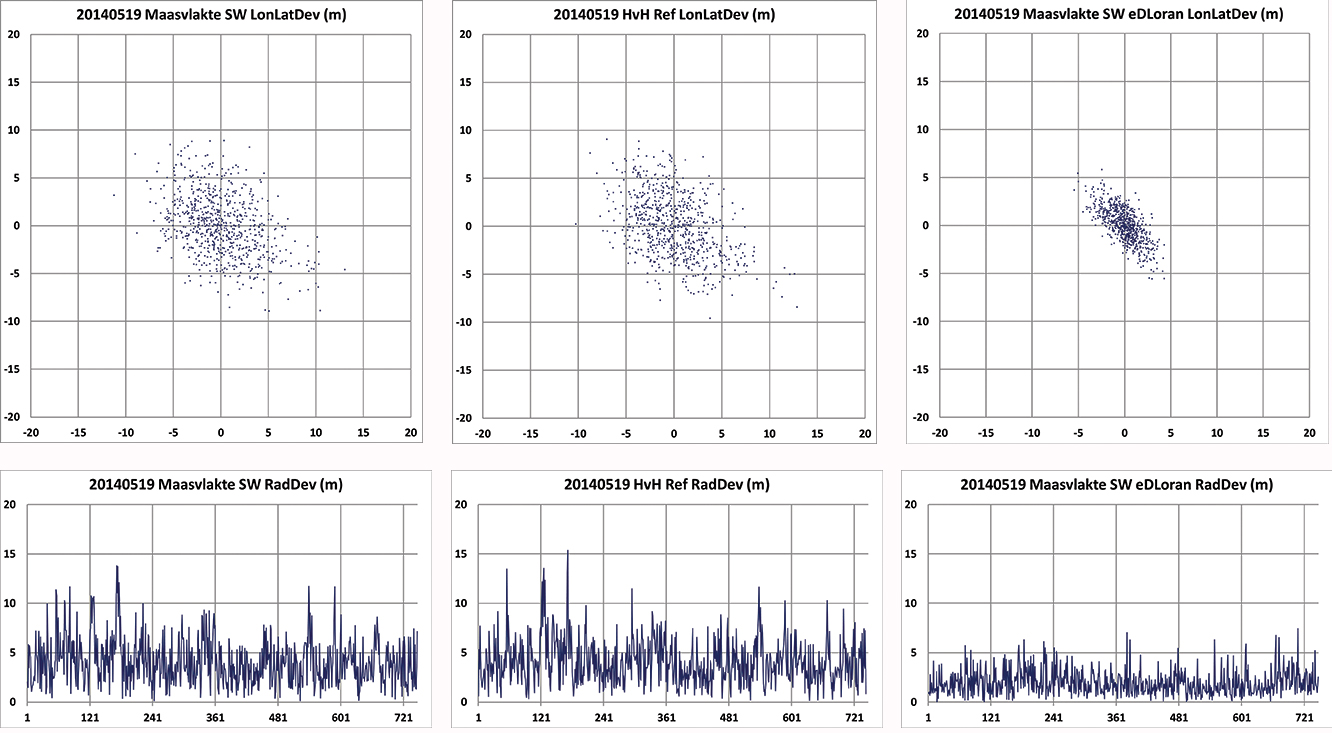
Static Tests. To give a realistic image of the resulting errors of eDLoran, the scatter plots in Figures 7 and 8 are depicted in the position domain. The radial errors are shown in the time domain where the horizontal axis gives the 5-second epochs. The left and the middle plot show the results of the rover and the reference receiver, respectively. The eDLoran plots on the right depict interesting results, as those variations in ASF are largely cancelled while the scattering is smaller than that of the measurements at the rover and the reference receiver, individually. The scattering at the two locations was apparently partly due to low-frequency disturbances, for example because of the moving phase center of the antenna at Anthorn, or instabilities in the time-control loops in the transmitters.
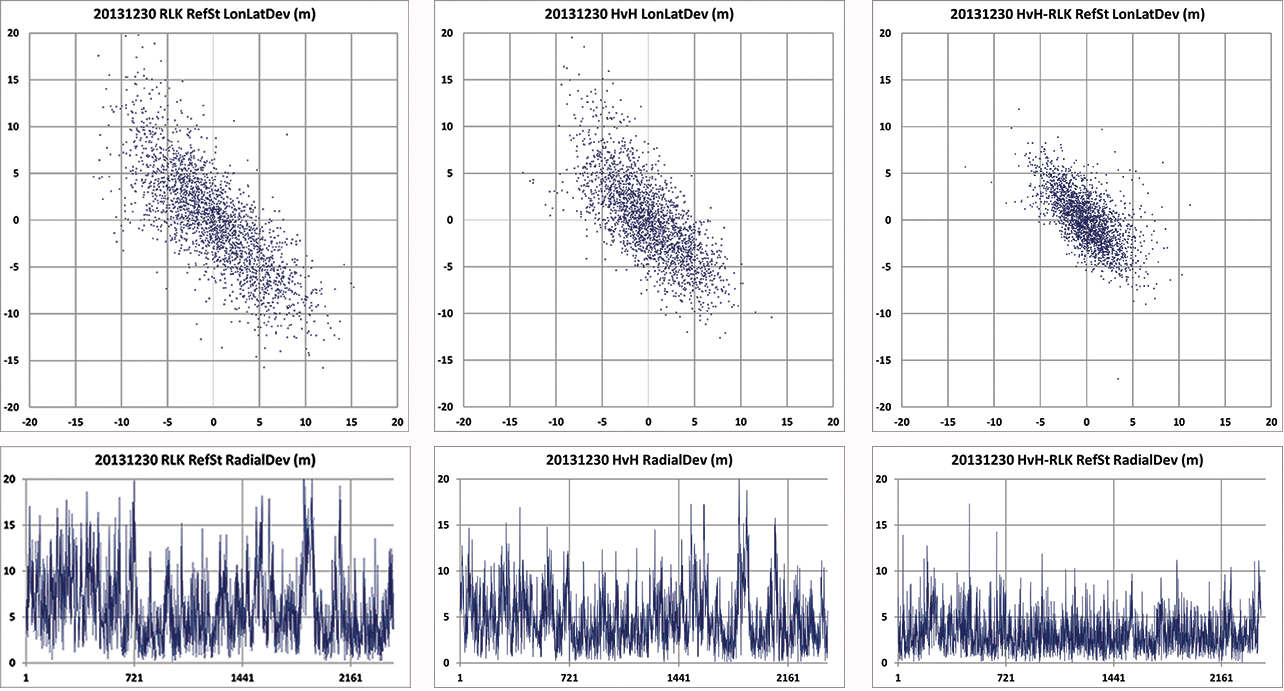
Figure 7. Position scatter plots in the upper row and radial error plots in the lower row of the user receiver on the Maasvlakte and the reference receiver at Hook of Holland. The right-hand column depicts the results for eDLoran. The two sites are separated by about 11 km. The horizontal axis shows the 5-second epochs.Figure 8. Position scatter plots in the upper row and radial error plots in the lower row of the receivers at Reelektronika and Hook of Holland. The right-hand column depicts the results for eDLoran. The two sites are separated by about 40 km. Some eDLoran accuracy degradation around events 250 and 500 may be due to local interference at Reelektronika.
Figure 7 shows the situation where the rover and the reference receiver were separated by 11 kilometers, while Figure 8 depicts the results when the rover receiver was at Reelektronika, more than 40 kilometers from the reference site at Hook of Holland.
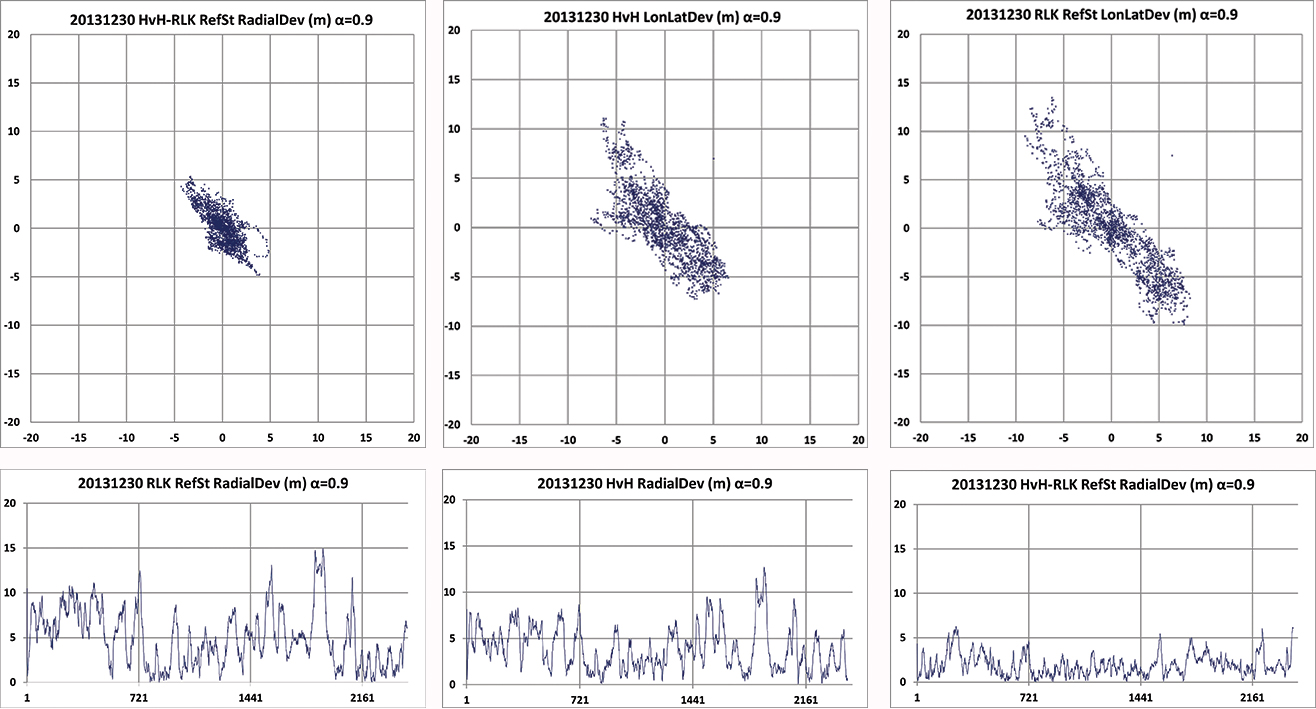
This effect of movement of the phase center of the transmitter antenna is further made visible by applying an alpha-tracker (α = 0.9) on the position data of both receivers, which have an update rate of 5 seconds. The lining-up of dots on some parts of the scatter plots in Figure 9 are believed to be due to swaying of the transmitter antenna. Due to the low-pass filtering, the disturbances now contain fewer high-frequency terms.
Investigating the radial error plots of Figure 9, it is remarkable that the large excursions at event 1880 largely cancelled. The disturbance at event 1880 might be caused by antenna movement at Anthorn, which is nearly perfectly cancelled by eDLoran.
Figure 9. Above plots are based on the same data as in Figure 8 but now after passing through an alpha tracker with α = 0.9. Note the correlation of the radial deviations around events 1800 in both 40 km separated receivers and the strong reduction in scattering.
Investigating the radial error plots of Figure 8 and 9, it is remarkable that the large excursions around epoch 1900 largely cancel, while this is not happening at epoch 250. There, some local interference might have been the cause. The disturbance at event 1900 might be caused by swaying of the Anthorn antenna which is then a common-mode error at both receivers and is therefore strongly reduced in the eDLoran plots.
Dynamic Tests. Dynamic testing on board the Polaris at sea (Figure 10) is somewhat more complex to do correctly. The eDLoran receiver was installed about 1 meter above the GPS-RTK reference receiver. In this way, the lever-arm problem of not installing the antennae of the two receivers at the same location was avoided. The next issue was measuring ASF position data, which should happen synchronously with the GPS measurements. Time synchronization can be achieved by using simple GPS receivers at both Loran receivers. Some months later, the eDLoran concept was tested by using the stored AFS data and using a Reelektronika eDLoran receiver as a portable pilot unit (PPU) which looks identical to the GPS-based units the Rotterdam pilots use, manufactured by AD Navigation in Norway.
Figure 10. Top right, the Pilot Station Vessel MS Polaris (80 meters) used to test eDLoran (photo copyright Loodswezen). Below is a complete eDLoran receiver with a ‘life-line’ connected to avoid losing the receiver by accident and to allow charging the internal batteries.Figure 11. Five test antennae on the MS Polaris. From left to right the ADNav Master Processing Unit, the ADNav Heading Unit, the ADNav Position Unit with the Reelektronika eDLoran receiver 1 meter above it and, finally, a second Reelektronika eDLoran receiver.
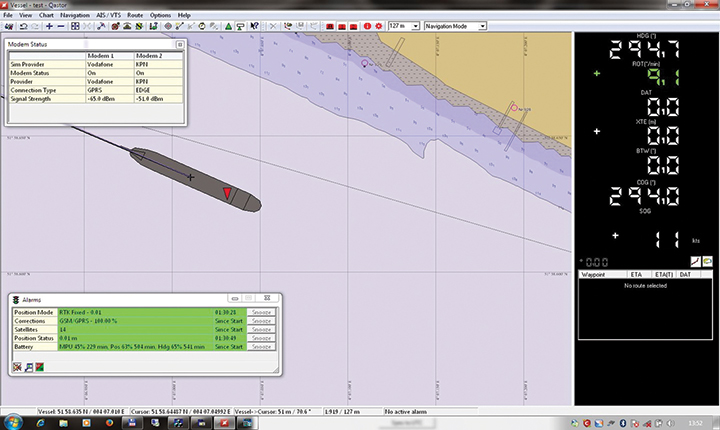
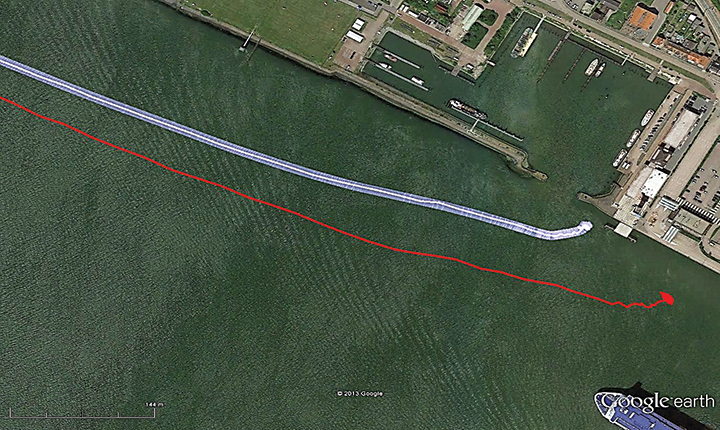
The results have been demonstrated to the harbor authorities in real-time on the laptop of the pilots on which the GPS-RTK and the eDLoran position were simultaneously shown. See Figure 12, where the large gray ship model represents the position and heading derived from GPS-RTK. The width of the ship model is 10 meters. The red triangle gives the eDLoran position; it remains within the borders of the ship symbol. For further demonstration purposes, the logged GPS-RTK data could also be plotted on a Google Earth map (Figure 13). The track was widened to 10 meters, as the accuracy requirements are 5 meters on either side of the track. The raw eLoran track is also shown, as well as the final white eDLoran track of unfiltered raw eDLoran data, which stays well within the 5-meter boundaries.
Figure 12. The large ship symbol (grey) is derived from the GPS-RTK receiver of the Rotterdam pilots. The width of the ship symbol is 10 meters and the speed-over-ground was 11 kts. The red triangle is generated by the eDLoran receiver and remains between the required ± 5 meter limits for eDLoran.Figure 13. The red track is based on raw eLoran data without any corrections. The transparent blue line is made by GPS-RTK and is widened to 10 meters giving the required ± 5 meter limits of eDLoran. The white line is output from the eDLoran receiver which stays within the borders of the 10 meter wide transparent blue line.
During the sea trials, the eDLoran receiver was connected to the eDLoran server on land via a miniature GSM modem to the Internet. All differential data were read via this mobile link. The required data bandwidth is very low, approximately 150 bps per ship (client).
Conclusions
The outcome of this research opens some new and quite surprising possibilities for multiple applications:
eDLoran offers the best possible eLoran accuracy, as it does not suffer from unstable transmitter antennas, sub-optimal timing control of the transmitter station, and differential data latency.
There is no need to replace older Loran-C stations with eLoran transmitters; this potentially would save large amounts of money. Further savings may be obtained by containerizing the transmitter and operating the stations unmanned.
Installing eDLoran reference stations is fast, simple, and very cost-effective.
The Eurofix Loran Data Channel can be freed from a relatively large stream of DLoran data, which leaves the full data bandwidth available for UTC and short-message services over very large areas.
As there is no data channel bandwidth limitation, multiple reference stations can be installed, offering increased reliability and making the system more robust to terrorism and lightning damage.
Single or multiple eDLoran servers can be installed in a protected area. There is hardly a practical limit to the number of differential reference stations to serve.
The server selects the most optimal differential data based on the raw position of the user (client) and the available reference stations.
As there is no need for any Loran data channel, eDLoran can be installed in all locations where Loran or Chayka coverage and access to the Internet are available. Required data bandwidth is approximately 150 bps per user.
Standard eLoran receivers used on controlled trajectories (for example, pilots and ferries) collect position data when accurate DGNSS is available. The collected GNSS and eLoran data can be uploaded to the server to further refine the ASF data base. It is basically a self-learning system.
All eDLoran reference stations monitor the eLoran and GNSS positions to offer alarm services in case of GNSS jamming or spoofing.
Acknowledgments We are very grateful for the near-endless hospitality of the Rotterdam Pilots and especially the crew of the MS Polaris and the MS Markab. Without their help, we would not have obtained the eDLoran results presented here. During the days at sea, we learned how much experience and professionalism is needed to bring those extremely large vessels safely in the harbor of Rotterdam.
We thank Martin Rumens and Dave Kelleher of Babcock International Group for their valued comments and diagrams.
DURK VAN WILLIGEN is a retired professor of electronic systems for navigation at the Delft University of Technology. He is founder and president of Reelektronika B.V., and started the development of Eurofix in 1985. He received the Thurlow Navigation Award of the Institute of Navigation (U.S.) and the Gold Medal of the Royal Institute of Navigation (UK).
RENÉ KELLENBACH graduated from Delft University of Technology in electrical engineering. After joining Reelektronika as a systems engineer, he has been involved in designing hardware and software for radionavigation and radar systems.
CEES DEKKER graduated from the Delft University of Technology in electrical engineering. He worked previously at Philips Research Labs and now assists Reelektronika B.V. with the development of Loran systems and GPS-related projects, and information systems.
WIM VAN BUUREN is a licensed maritime pilot in Rotterdam who took the initiative to develop a backup positioning system for the approaches to Rotterdam. He has been involved in the design and development of the hardware and software of Portable Pilot Units on a national and European level since 2000.
Juniper Systems and Futura Systems have partnered to provide enterprise utility GIS solutions for the electric and utilities industries. This August, Futura Systems will be launching at its user conference a new pole-staking application called GPSStaker.
Staking, or line design, is performed when new locations need to be added to an existing electric line. It involves mapping a new utility pole run, ensuring that the distance between each pole is up to code and geolocated, and then recording the GPS coordinates of where each pole should be placed. GPSStaker was optimized for Juniper Systems’ Archer 2 rugged handheld, and works with Esri ArcMap.
Using GPSStaker, stakers — or field engineers — can GPS-stake a job on the Archer 2 using ArcPad 10. The data is then automatically synced back into a main database.
“The people in the field want lighter hardware and more efficient staking processes,” said Doug Malinowski, CIO of Futura Systems. “With Futura GPSStaker and the Archer 2, we’ve designed a promising solution that combines the accuracy they need with the design quality they want.”
Because of overwhelming interest in the Pegasus:Two Mobile Mapping Contest, the Leica Geosystems Mobile Mapping team has announced an extension of the contest deadline. Entrants now have until August 31, 2014, to submit their detailed proposals and project timelines.
“We are very excited about the interest shown in the Pegasus:Two mobile mapping solution and the resulting enquiries into the contest,” says Stuart Woods, project manager at Leica Geosystems. “Extending the contest deadline provides potential entrants with more time to create and prepare their entries. There are many fantastic ideas developing throughout the world and we’re extremely curious to learn about them.”
The winner of this contest, who will receive free use of a Leica Geosystems’ Pegasus:Two mobile mapping system for six months plus $10,000 USD to spend on the project, will be announced on September 8.
Half the year is over. It’s gone. Now it’s time to figure out where the location industry is going for the remainder of the year. One analyst (actually, several) believe that the industry, fueled by indoor location and place-based advertising, is around $14 billion right now — with no place to go but up — given some bump in consumer awareness. In other news in a busy month, Google bought Skybox Imaging for $500 million in cash.
As the mid-point of 2014 arrives, with a few big location industry deals already consummated, there is a chance for industry executives to study what is going to be a strong niche market in the months ahead.
One analyst believes a big location niche is indoor analytics and proximity marketing, which is defined as nearby a store or within a business. “The latter would include ads and coupons. We’ve estimated that roughly $3.5 billion of potentially $14 billion, or so, in 2014 U.S. mobile ad revenue, will be location-based [broadly defined],” said Greg Sterling, founder of Sterling Market Research. “Of that, about $1.4 billion will be ‘geofenced’ or nearby.”
Sterling believes that the in-store component is still in an embryonic stage. “There are billions of dollars of coupons distributed every year, but most of that is still print. Some of that is in-store distribution and redemption,” he said. “A portion of that over time will migrate to mobile in or near stores.”
Sterling said there are billions of dollars available from proximity marketing, but it will take time. He cites “Mapping the Indoor Marketing Opportunity,” a report he authored for Opus Research, that says the market for indoor location and place-based marketing/advertising will surpass $10 billion by 2018. (See a preview of the report here.)
In a published report, Sterling admitted that he was nervous about the $10 billion number, but it may turn out that the figure could be conservative because of the software licensing from indoor markets.
Sterling says that while indoor positioning has been important to the older location business, it is still in its early stages. The big deal is mobile, which has brought new attention and interest to location, he said. “Indoor location will feed mobile and online marketing with data and analytics as well as targeting opportunities,” he said.
Many executives and analysts in the location industry have marginalized privacy issues; some even say it is dead with opt-in approval by consumers. However, privacy issues will continue to hamper the location industry, Sterling said.
“Privacy is far from dead. Indeed, it’s on the rise, and a major issue that everyone in the location and mobile segments needs to tackle head on,” Sterling said. “Denial, delay and obfuscation will result in regulatory intervention and/or consumer fear/rejection.”
In a blog, Sterling said that the San Francisco-based Philz Coffee chain no longer will be tracking customers after a local ABC affiliate revealed they were using Euclid retail analytics. Sterling said the ABC report acted as if it had uncovered a big government or corporate conspiracy.
Sterling will be giving the keynote address at the Place Conference in New York on July 22 at the W Hotel. Topics include proximity marketing, indoor positioning markets, privacy and other location topics.
Google Continues Location Industry Dominance with Acquisition
Google enhanced its online mapping service by acquiring Mountain View, California-based Skybox Imaging for $500 million in cash. Sources say both Google and Facebook are purchasing satellite and drone companies in an attempt to expand into other market areas.
One of the ways Google will be leveraging Skybox is in disaster relief and to improve Internet access in remote areas, something the company has been strongly pursuing.
On its website, the five-year-old Skybox said that it plans also to share in the development of the burgeoning autonomous vehicle market and continue to design its own satellites.
A Skybox satellite image of Tampa, Florida.
AT&T Expands Location Information Services
AT&T’s new Location Information Services, which includes a security function and LBS, is expanding into more than 150 countries this summer in a pilot project. The Location Information Services are enabled through an API that can notify companies when their customers, who opt-in for the service, arrive in a new country.
Some application examples, provided by AT&T, include credit card companies confirming customers have traveled to a new country as soon as a device is turned on; allowing the credit card company to either decline or approve purchases overseas; companies using the service to track the movement of equipment to prevent stolen property; and the ability for hospitality entities to offer restaurant and other suggestions to consumers based on their location.
In other LBS news:
The new Amazon Fire Phone has GPS and location functions plus a new feature, Dynamic Perspective, which can be used for such built-in apps as maps and games. The phone is available on July 25, but Amazon is taking pre-orders. In the meantime, competitor Apple has a new iOS 8 feature that allows shoppers to enter their payment details on an m-commerce site by scanning their credit card with the camera on their mobile device, according to published reports. The operating system will use sensors to provide apps with indoor positioning data.
HERE acquired the mobile predictive analytics firm, Seattle-based Medio, earlier this month. The company plans to integrate Medio’s predictive analytics, in conjunction with its map platform, to customize LBS “prediction experiences” for consumers, according to published reports. These experiences (full disclosure, I hate it when companies use the word, “experience”) may include delivering restaurant or other information at a relevant time, such as around lunch. While no financial details were released, the deal is expected to close at the end of July.
Hundreds of businesses in Brixton, near London, will be integrating Apple’s iBeacon as part of the first networks for mobile payments, according to published reports. Businesses in Brixton are switching from currency payments to mobile payments by text. Previously, iBeacons have been used for proximity offers, advertisements and product information when a user is in a retail area. The mobile payment application allows users to quickly check out, reports say.
Google enhanced its online mapping service by acquiring Mountain View, California-based Skybox Imaging for $500 million in cash. Sources say both Google and Facebook are purchasing satellite and drone companies in an attempt to expand into other market areas.
One of the ways Google will be leveraging Skybox is in disaster relief and to improve Internet access in remote areas, something the company has been strongly pursuing, according to GPS World’s LBS Editor Kevin Dennehy.
On its website, the five-year-old Skybox said that it plans also to share in the development of the burgeoning autonomous vehicle market and continue to design its own satellites.
Skybox posted a message about the acquisition on its website: “We’ve built and launched the world’s smallest high-resolution imaging satellite, which collects beautiful and useful images and video every day. We have built an incredible team and empowered them to push the state-of-the-art in imaging to new heights. The time is right to join a company who can challenge us to think even bigger and bolder, and who can support us in accelerating our ambitious vision.
“Skybox and Google share more than just a zip code. We both believe in making information (especially accurate geospatial information) accessible and useful. And to do this, we’re both willing to tackle problems head on — whether it’s building cars that drive themselves or designing our own satellites from scratch.”
Steven Spriggs was pulled over by a motorcycle cop for using his iPhone while driving. He immediately held it up to show the officer that he was using Apple Maps, and not talking or texting. More about Mr. Spriggs later. With approval of the pending transportation bill in Congress, smartphone maps and navigation will be regulated. The National Highway Traffic Safety Administration (NHTSA) would receive the power to regulate apps like Google Maps or Apple Maps. NHTSA’s job would be to review navigation apps and order changes to decrease driver distractibility.
Guess who is in favor of this new regulation for smartphone apps? Automakers. Embedded navigation systems, those found in the dashboard of vehicles, are already regulated by NHTSA. Smartphone navigation apps are a much cheaper option than the systems offered by automakers, who are looking for a more level playing field and a way to slow down the smartphone navigation juggernaut.
The downside to this regulation is big. If it was just Apple and Google mapping, oversight would be simpler, but Apple App Store and Google Play Store are filled with hundreds of mapping and navigation apps. Logistically it doesn’t seem possible for the NHTSA to review all of the apps efficiently without causing interference in the market. NHTSA doesn’t currently have the budget, infrastructure or staffing to be successful.
The forum of the radio show “Car Talk” is alive with discussion on NHTSA’s desire to control navigation. The vast majority of posters point out the distraction from using a paper map or being lost. “Personally, I prefer a full-sized road atlas on the seat beside me for all my navigation needs. Taking occasional readings with a sextant helps, but is difficult while eating my Big Mac and holding the wheel with my knee,” Paul Carney writes with sarcasm. On the other side, Victor Cooper responds, “YES! It is long overdue. And I think it is about time we treat texting while driving the same as we do drunk driving…criminal penalties and all.”
I think regulation on mapping and navigation may help make the apps simpler to use and less distracting. Before passing a regulatory law, I’d like NHTSA to successfully demonstrate a review system that doesn’t impede innovation, significantly delay new products, or make it overwhelming difficult for small start-ups.
So what happened to Steven Spriggs? The police officer went ahead and wrote a $165 ticket for using a cell phone while driving, despite Spriggs argument that the law didn’t apply to navigation apps. Spriggs challenged his ticket in California’s state appeal court and won. The $165 went back into Spriggs’ pocket and map users everywhere sighed with relief,
An independent study of indoor tests of a hybrid wireless location technology was submitted today to the Federal Communications Commission (FCC) by wireless location engineering firm TechnoCom. The study demonstrates that existing technologies can satisfy location requirements within the timeframe proposed by the FCC in its draft rule on indoor 911 accuracy for wireless calls, according to True Position, which commissioned TechnoCom to perform the testing.
Multiple wireless carriers have challenged the technical feasibility of the proposed rule, claiming that existing technologies cannot satisfy the proposed accuracy requirements, with a spokesperson for the industry trade association claiming the rule represented “aspirational target setting.”
The results filed today by TechnoCom disprove those assertions, showing that viable technology exists in the market today, True Position said. According to TechnoCom’s findings, “The outcome is a current overall performance that readily meets the FCC’s proposed location performance threshold for indoor wireless E911 at the 67th percentile. The demonstrated performance even comes very close to meeting the 50 meter threshold at 80%, which is intended for 5 years from adoption of the proposed rules.”
Multiple other vendors have submitted filings to the FCC claiming that their technologies would also satisfy the requirements of the rule on the timeline proposed by the FCC.
“These results should prove helpful to the FCC as it moves toward reaching a resolution on its proposed rule on indoor location requirements,” said Craig Waggy, CEO of True Position. “We know that accurate location information is vitally important to American consumers, and that the FCC is intent on remedying the lack of wireless indoor location requirements for calls placed to 911 from wireless devices.”
The tests were conducted using True Position’s commercially available Uplink Time Difference of Arrival (UTDOA) technology standalone, and a hybrid solution consisting of Assisted GPS (A-GPS) and UTDOA technologies, and included indoor testing in both urban and suburban environments in Wilmington, Delaware, and surrounding areas.
For the testing, buildings of varying sizes, construction materials and use were selected by the independent firm, and a total of 62 test points were selected among 16 buildings. In all cases, the test buildings and test points remained anonymous to True Position until the conclusion of the testing and delivery of all results to the independent firm.
In early 2013, TechnoCom conducted the indoor accuracy testing for the FCC’s Communications, Security, Reliability and Interoperability Council (CSRIC). The same location and measurement methodologies were used in these tests.
The FCC has estimated that 10,000 lives could be saved each year if calls made to 911 from wireless phones had accurate location information.
Eagle Mapping Ltd., a North American digital airborne mapping company, is now using the new Riegl LMS-Q1560 airborne laser scanner system. Designed to capture ultra-wide swaths and complex environments, the high-performance Riegl LiDAR will enable Eagle Mapping to expand into new markets including large-area, forestry and urban mapping applications for governments and first-nation organizations.
“The Riegl LMS-Q1560 is a powerful laser scanner developed to acquire data over large geographic areas at high altitudes,” said James Hume, Eagle Mapping President. “This will allow us to map expansive cities, counties and tribal lands quickly and cost effectively.”
Riegl designed the powerful dual-channel LMS-Q1560 laser scanner with integrated medium-format camera for a variety of airborne mapping projects with an emphasis on wide-swath coverage. With a 58-degree field of view, the laser can be operated at a maximum pulse repetition rate of 800 kHz capable of measuring 530,000 points per second on the ground from an altitude up to 15,500 feet AGL.
“The Riegl LMS-Q1560 is the most cost-competitive airborne laser scanner on the market today,” said Hume. “We can fly at a higher altitude and collect a denser spacing of elevation data than any other LiDAR system out there.”
In addition, the Riegl LMS-Q1560 has a forward-and-look capability which, when combined with its wide field of view, enables the device to capture data from multiple angles effectively and accurately at an extremely high point density. The sensor also utilizes Multiple-Time-Around processing, echo digitization and waveform analysis to simultaneously track more than 10 pulses in the air.
This means the LiDAR can collect tightly spaced elevation points even in complex environments. Examples are built-up city centers with a variety of buildings and vertical structures, as well as extremely rugged mountain terrain where elevations change dramatically and abruptly.
“Whether working in the mountains of British Columbia or over a densely developed urban center, we will capture accurate elevation points between soaring peaks as efficiently as we do between high-rise office buildings,” added Hume. “And regardless of the terrain, we’ll collect more data in a day and finish jobs faster than we could before.”
Over nearly three decades, Eagle Mapping has built its reputation on finding more accurate and affordable mapping technologies. Focusing primarily on the global mining industry, the Vancouver firm was among the first to deploy airborne LiDAR technology for mapping. More recently, the Canadian firm configured a high-density, narrow-swath Riegl VQ-580 LiDAR with a DiMAC medium-format camera on a single aircraft to simultaneously collect elevation and image data for efficient mapping of pipeline and transmission line corridors.
“As we expand into urban and large-area projects for government clients, we will continue to support our extensive client base in the international mining and corridor mapping markets,” said Rodney Cope, vice president of sales and marketing.
Eagle Mapping operates a Cessna 206 and Piper Navajo aircraft based in British Columbia. The Navajo carries the new Riegl LMSQ1560, and the Cessna is equipped with the Riegl VQ-580 LiDAR and DiMAC digital camera. The firm maintains field offices in Bellingham, Washington, USA, and Medellin, Colombia, in South America.
The LBS market continues to grow strongly and with the arrival of always-on ubiquitous location, ABI Research believes that the market is ready to truly support location based advertising efforts. In Western Markets, a third generation of location-based services is now underway. It has forecast retail/shopping, ambient intelligence, hyperlocal social and personal asset tracking/BLE beacon applications to emerge as the next wave of important location based services over the next five years, with ABI Research forecasting a four-fold increase in revenues by 2019.
In emerging regions the value of location is not lost with strong local deals/offers markets already emerging. Senior analyst Patrick Connolly comments, “In Asia, ABI Research sees LBS downloads breaking 4 Billion in 2019. In China, major Internet companies can see the necessity of location and are acquiring/integrating as they move to mobile. Tencent, the Chinese Internet giant, has spent approximately $200 million to acquire an 11.28% stake in mapping company NavInfo. This follows Alibaba’s acquisition of AutoNavi. Tencent has also invested in the Chinese Yelp, Dianping, which is one of the top three players in the local deals market, which is estimated to have reached $1.2 Billion in 1Q14. Sina Weibo, which floated on the NASDAQ in April also has its own Places application.”
Furthermore, in a reversal of previous LBS application trends, ABI Research expects to see many of these companies expanding into international markets in the future. Momo is such an app, with 20 million subscribers, which is using location to go local and generate advertising revenues. It has used a round of investment to launch an English version of the application, which it hopes will enable it to expand.
A new text and reference book, Geospatial Computing in Mobile Devices, has been published by Artech House. Recent developments in smartphones enable them to meet many of the demanding requirements for geospatial computing, in terms of computation power, data storage capacity, and memory space. This book, written by Ruizhi Chen and Robert E. Guinness, addresses and instructs in geospatial data acquisition, processing, visualization, context detection, and context intelligence.
Chapters of the 209-page book include:
Fundamentals of Mobile Positioning
GNSS, Wireless, and Hybrid Positioning in Mobile Devices (three separate chapters)
Mobile GIS and LBSs (two separate chapters)
Context Awareness and Reasoning (two chapters), and