Developments in the LightSquared saga came fast and furious in June; highlights are listed below and briefly recapped in the adjacent news story. It will be dated by the time you receive this issue, as it went to press three weeks prior.
For current events, see Top Story and Latest News, and the full versions of stories abridged here. The Navigate, Survey Scene, and GNSS Design & Test e-newsletters, free at env-gpsworld-integration.kinsta.cloud/subscribe, will keep you up to date.
In chronological order, from late May to late June:
LightSquared Las Vegas Test Towers Flawed, FCC Filing Shows
House Bill Ensures FCC Takes No Action that Would Harm Military Use of GPS
Test Data Shows LightSquared Slams Medium, High-Precision GPS Receivers
PNT Advisory Board Finds Interference, Says Move It
LightSquared, FCC Rebuttals Distort Record
NPEF Report on Military Receivers Calls for FCC Recision
LightSquared Asks for, Receives Extension on Final Interference Report
Claims of LightSquared Solution Discounted
Air Transport Association Tells Congress to Protect GPS
Interference with GPS Poses Major Threat to U.S. Economy
LightSquared Applies to International Telecommunications Union for Global Signal
Flawed Test Towers
Results from a key round of field tests conducted near Las Vegas, Nevada, may show overly optimistic results regarding the effects of the LightSquared terrestrial signal on GPS receivers. According to a LightSquared addendum filed with the Federal Communications Commission (FCC) a week after the May 16 Working Group report, the company’s equipment broadcast during the tests at lower-than-planned levels for its eventual deployment across the United States. Further, LightSquared may not currently be prepared or equipped to broadcast according to the terms of its business plan or its conditional waiver.
LightSquared does not appear to have developed the full software suite nor possess the full equipment to implement the plan the company says has been in preparation for many years. Critical testing was conducted under conditions that do not truly replicate what may be the case should the FCC allow the plan to go forward.
House Bills Target the Waiver
On May 27, the U.S. House of Representatives passed a bill stating that the FCC shall not provide final authorization for LightSquared operations until Defense Department concerns about GPS interference have been resolved. The bill then went to the U.S. Senate for its action.
On June 23, the House Appropriations Committee approved action that would stop the FCC from expending any funds related to the LightSquared conditional waiver until all concerns have been resolved about interference with GPS. The amendment passed in a unanimous voice vote by the full committee, underscoring growing congressional concern about harm to GPS.
The House actions and a letter to the FCC signed by 32 U.S. senators may presage a showdown over the issue between Congress and the president, who has promised increased broadband access. A 4G wireless network providing this access could be facilitated by LightSquared sales of service via its tower transmitters to wireless carriers. LightSquared has already signed a $20 billion, 15-year deal with Sprint.
Tests Slam High-Precision Receivers
Data from Las Vegas field tests show that wide-bandwidth, high-precision GPS receivers started feeling the effects of the LightSquared transmission about 1,800 meters from the tower. Medium-bandwidth high-precision GPS receivers started feeling the effects of the LightSquared transmission at about 1,200 meters from the tower. In each case, there was about a 200-meter buffer from when the GPS receivers started to feel the effects of the LightSquared transmission to the GPS receiver being jammed, at 1,600 meters and 1,000 meters respectively.
GPS World has received further details of the tests but has not been authorized to publish them yet.
Deere & Company, a major provider of precision agriculture equipment and services, notified the FCC on May 26 of substantial interference with its GPS receivers by the LightSquared signal. Deere receivers registered impact of and interference by the LightSquared signal as far away as 22 miles from a transmitter. Further, the company has found no practicable technical solution to the problem.
PNT Advisory Board: Move ATC
At its June 9–10 meeting, the National Space-Based Positioning, Navigation and Timing (PNT) Advisory Board found that GPS services cannot be assured if the LightSquared plan is approved, and that the only viable option for continued availability of GPS as well as new wireless broadband is to find another spectrum for LightSquared not adjacent to the GPS frequency.
The formal recommendation reads: “The provision of GPS services cannot be assured if the LightSquared proposal for satellite and terrestrial broadband provision using the MSS L-Band receives final approval.
“The only reasonable and viable option to continue ubiquitous availability of GPS and the provision of a new 4G wireless broadband capability would be for the FCC to assign an alternate frequency spectrum to LightSquared that has little or no probability of affecting the delivery or utilization of GPS/GNSS services.”
During the discussion, one advisory board member, a former goveronor of the state of Wyoming, told presenter Jeff Carlisle of LightSquared, “Your definition of mitigation seems more tied to a legal argument than a common-sense argument.”
Rebuttals Distort Record
Claims by LightSquared’s Carlisle and FCC chair Julius Genachowski, that the GPS industry knew long ago about LightSquared’s plan for powerful terrestrial transmitters, contradict the truth. Examination of FCC filings show that the GPS industry knew about and agreed to a plan by a previous ownership of the company, for a different purpose, with a different business concept, and employing a completely different technological approach, one that would not have harmed GPS transmissions and disabled GPS users the way the current LightSquared plan does.
The terrestrial broadband operations first unveiled in November 2010 cannot be described as ancillary to the purpose for which Lightsquared predecessors Motient, MSV, and SkyTerra received their spectrum and licenses — that is, to provide a service that was primarily a mobile satellite service. The November letter to the FCC described a new business model that turns the original concept on its head. LightSquared for the first time revealed plans to build a “nationwide network of 40,000 terrestrial base stations,” and stated that “the capacity of its fully deployed terrestrial network across all base stations will be tens of thousands of times the capacity of either of [its] satellites.”
The deviations from established policy required to accommodate LightSquared’s new business model are not technicalities. They represent a fundamental change to a complex and interrelated set of rules that were carefully designed to protect GPS users from interference.
The predecessor companies had to protect their own primary satellite operations from interference. The protection that their own satellite operations required was also sufficient — at that time — to protect GPS receivers. The terrestrial network and powerful signal LightSquared now proposes bear no resemblance to the operations the FCC authorized in 2003.
Military Report Calls for FCC Retreat
The National PNT Engineering Forum concluded after testing classified and GPS receivers under LightSquared terrestrial transmission conditions: “Significant concerns remain that operation of an ATC integrated service as originally envisioned by the FCC cannot successfully coexist with GPS.”
The NPEF report calls for rescinding the FCC waiver for LightSquared terrestrial transmissions, conducting more thorough studies on impacts, and revisiting the 2003–2010 authorizations. The group tested a variety of military receivers under classified categorization, also known as “government receivers.”
Final Report Withheld
At the last minute of a June 15 deadline for the final Working Group report on interference, LightSquared asked for a two-week extension. Federal regulators granted the request, and the final report is now due on July 1.
A spokesperson for the Coalition to Save Our GPS revealed that “The Working Group results show devastating interference to GPS and no proven method of mitigation. Delay will not change these results. These results are the same results the FCC had had before it granted the waiver.”
Some Solution. Three days after requesting the delay, LightSquared announced it had solved the problem, by proposing to broadcast only from the lower end of its permitted spectrum band. GPS experts countered that this would still disable the functioning of high-precision receivers.
Air Transport Opposes Waiver
The Air Transport Association and the Aircraft Owners & Pilots Association told Congress that the only acceptable mitigation is for LightSquared’s operations to be moved outside of the L-band and away from GPS. “With so much of the early evidence showing that LightSquared’s proposed network would potentially endanger nearly every flight operating in U.S. airspace, it seems evident that no further development of this system can be allowed.”
Going Global
LightSquared has filed documents relative to the International Telecommunications Union, signaling intent to use its entire band at the full authorized power. The company’s goal appears to be to work internationally, circumventing U.S. regulation, to obtain permits to broadcast a terrestrial signal globally.
Non-aviation users of satellite- and ground-based augmentation systems do not require the conservative level of integrity built into these systems for aviation users. Removing it can produce substantial benefits in terms of smaller error bounds and improved availability.
By Sam Pullen, Todd Walter, and Per Enge
Both space-based and ground-based augmentation systems (SBAS and GBAS, respectively) are designed to enhance standalone GNSS navigation to meet the requirements of civil aviation. SBAS and GBAS corrections and integrity information are also available to the non-aviation user population, such as automobiles, buses, and trains on land as well as ships near shore. This much larger user base can benefit as much from the integrity components of SBAS and GBAS as from the increased accuracy obtained from applying SBAS and GBAS pseudorange corrections. However, there are significant differences between the aviation interpretation of navigation integrity and the interpretation that would be natural to most users.
SBAS and GBAS provide integrity in a multi-step procedure that is laid out in the RTCA Minimum Operational Performance Standards (MOPS) for the FAA versions of both systems: DO-229D for the Wide Area Augmentation System (WAAS) and DO-253C for the Local Area Augmentation System (LAAS). These systems indicate which ranging measurements should be excluded as unsafe to use and provide bounding error standard deviations, or sigmas, for the remaining usable measurements. Each aircraft uses this information to compute vertical and horizontal protection levels that define position-domain error bounds at desired probabilities. This process is straightforward, logical, and is not limited to aviation users. However, the requirements and assumptions underlying it make it very conservative.
SBAS and GBAS are designed to meet integrity requirements defined in terms of what is known as specific risk. Briefly, this means that all safety requirements must be met for the worst combination of knowable or potentially foreseeable circumstances under which an operation may be conducted. Some variable factors important to safety, such as the user’s satellite geometry, are known by definition. Others, such as receiver thermal noise, are random and unpredictable. But several factors that are critical to GNSS performance, such as multipath and ionospheric errors, are neither completely random nor deterministic. Specific risk typically treats all error sources that are not completely random in a worst-case manner. SBAS and GBAS are designed to mitigate specific risk to support civil aviation, and the resulting conservatism makes SBAS and GBAS less attractive to non-aviation users who expect tighter protection levels relative to nominal system accuracy.
Fortunately, non-aviation users need not apply all MOPS procedures required of aviation users if their own safety requirements differ. Most users define integrity in average or ensemble terms, meaning that everything not known in practice is treated as random and is probabilistically mixed (or convolved) together. The protection levels valid for these users would be much lower than for aviation users, even though the stated bounding probability is the same. This contrast is illustrated in Figure 1, which shows example bounds on 2-D vertical errors at a probability of 0.95 (the 95th percentile, or 95 percent) for accuracy and a probability of 1–10-7 for integrity. The term VPE stands for vertical position error, while VPL stands for vertical protection level. Analogous terms (HPE and HPL) and a similar picture exist in two dimensions for horizontal errors.
Only one 95 percent error bound is shown in Figure 1 because this probability can be observed, estimated, and modeled with theory and reasonable amounts of data (hundreds or thousands of independent samples). This is not at all the case at the very small probability of 10-7 that applies to aviation precision approach: it is roughly equivalent to one event in 47.5 years per 150-second precision-approach interval. Both theory and data fall far short of being able to predict such rare-event errors. Extrapolating from available data to 1–10-7 using Gaussian distributions is perilous because the Gaussian distribution almost never applies at such small probabilities. Mixed-Gaussian models, other so-called fat-tailed distributions, and inflation of Gaussian parameters help address this, but the uncertainty regarding the true error distribution results in significantly different error bounds depending on the assumptions that are made. The same is true regarding the effects of faults and anomalies that are more probable than 10-7 but are still rare and poorly understood.
In the end, different means of assessing these uncertainties and various degrees of user risk aversion result in different 1–10-7 protection levels, as shown in Figure 1. It is this difference that we wish to quantify and exploit in this article.
Average versus Specific Risk
The concept of average or ensemble risk is intuitive to those with a background in probability and is one of the key principles of probabilistic risk assessment (PRA). Thus, it helps to examine it first.
Average risk is the probability of unsafe conditions based upon the convolved (averaged) estimated probabilities of all unknown events. More specifically, probability distributions are derived (based on the best available knowledge) for all unknown parameters relevant to user safety, and these are combined (by probabilistic convolution) to create an overall distribution that represents safety risk as a function of the known parameters. This straightforward, natural interpretation of probability and uncertainty has a major advantage in that it cleanly separates the probabilistic calculation of safety risk from users’ aversion to risk. By keeping risk probability and risk aversion (or severity) separate, a final risk consequence measure can be derived that supports apples-to-apples comparisons of alternatives. One useful result of this is known as the value of information (VOI). By comparing the risk outcomes of two scenarios in which the latter case has additional information (for example, from an additional sensor or integrity monitor), the risk-reduction benefit of the added information can be traded off against the cost and complexity that it introduces to the system. Similar comparisons can be made for any definition of risk, but the definition and use of VOI in an average-risk framework makes the most sense in both theory and practice.
Turning to specific risk, no single definition exists within the aviation safety community, to our knowledge. This is partially because of the uniqueness and complexity of the concept and partially because multiple inconsistent interpretations appear to exist. Therefore, we provide our own definition: Specific risk is the probability of unsafe conditions subject to the assumption that all credible unknown events that could be known occur with a probability of one (on a risk-by-risk basis).
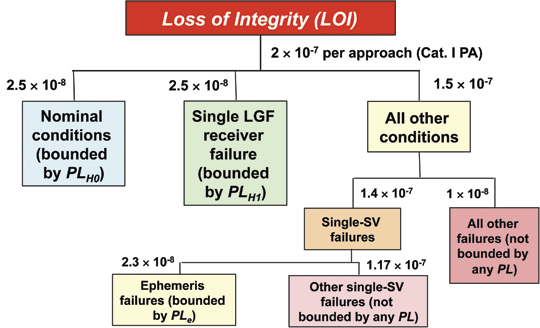
To understand how specific risk differs from average risk, it helps to start with a fault-tree representation of risk in which loss of integrity (LOI) can result from any of the nodes of the tree. Figure 2 shows a simplified example of a fault tree for CAT I GBAS. It shows the allocation of the CAT I total integrity risk requirement of 2 × 10-7 per approach to the various possible causes of integrity loss. In specific-risk analysis, each type of failure shown in the tree, if deemed to be a credible failure (meaning, in practice, that its assumed prior probability is larger than compared to its allocation in the fault tree), is assessed that the failure is guaranteed to occur in a worst-case fashion. This means that the variables that describe this particular failure scenario take the values that maximize the hazard to users. In an average-risk analysis, these variables would take many values according to their own probability distributions, and these distributions would be convolved together to provide an overall representation of risk under that scenario. Instead, one scenario drives the specific risk assessment for a particular user class, and it is the worst one possible from that user’s standpoint. (Another user class would be evaluated under a different set of parameters corresponding to the separate worst case for that user.) The improbability of the worst-case combination of parameters is not considered as long as the probability of the failure scenario as a whole is deemed high enough to be of concern.
Figure 2. Fault tree for CAT I GBAS integrity.
Since GNSS augmentation systems contain multiple levels of health monitoring, the worst-case scenario is usually the one that maximizes the probability of an undetected hazardous error for a particular user class. Hazardous error is typically defined as any error that exceeds a pre-defined safety zone known as an alert limit (AL) or any error that exceeds the computed protection level (PL), which allows integrity to be defined separately from the intended application. Both definitions are conservative in that all errors exceeding AL or PL are treated as equally hazardous. In other words, an error just above AL is treated as just as dangerous as an error of 10 × AL. They are also misleading when used in specific-risk analyses because the resulting worst-case conditions are those that give errors just above AL or PL, as these are the generally hardest for monitoring algorithms to detect.
The use of specific risk in aviation is an evolution of deterministic guidelines for tolerable risk that date back to an earlier era when flying was more dangerous. It remains dominant in aviation safety assessment because it is partly responsible for the development of safer and more reliable air transportation. However, it has several important weaknesses compared to average risk. The first is that the degree of risk aversion preferred for aviation is buried within the hazard probabilities generated by specific risk — it cannot be separated out. This means that specific-risk results do not translate well to other classes of users, as very few users would happen to have the same risk preferences that have evolved within aviation over several decades. In addition, specific risk makes a distinction between unknown events that could be known and those that are both rare and completely unknowable. A very risk-averse value of information is much different than the risk-neutral one built into PRA, as it severely penalizes systems that do not include all potentially-informative sensors. Since each sensor added to a system provides less benefit than the last, almost all cost-effective systems choose to include less than the maximum possible number of sensors.
The conservatism implicit in specific-risk assessment severely penalizes users. Although PRA would show that the combination of factors (shown in an example induced by extreme ionospheric spatial decorrelation) needed to produce a 40-meter error in a CAT I GBAS system is exceedingly improbable (almost certainly below 10-10 per approach), specific risk forces a significant part of the GBAS risk-mitigation effort to be targeted at this scenario. In this case, since monitoring is not guaranteed to detect the anomaly in time, the only recourse is geometry screening, a cumbersome technique in which the ground system continually evaluates the worst-case error and, if it exceeds a 28-meter tolerable limit at the CAT I decision height, determines which broadcast parameters to inflate such that all satellite geometries causing worst-case errors exceeding 28 meters are made unavailable (because the inflated VPL is larger than the 10-meter CAT I VAL). The result of this procedure is much lower user availability than would be achieved without inflation. SBAS pays a similar penalty, as we will see later. The broadcast grid ionospheric vertical error values that bound worst-case ionospheric errors (and thus the resulting protection levels) are much higher than they would be if the unusual combination of factors needed to create the worst-case error scenario were not the dominant concern.
To the extent that loss of availability represents a safety issue at the airspace level, the worst-case focus that results from specific risk is not optimal even from a safety standpoint. But this is not the only concern. Specific risk requires a great deal of development and testing to identify and mitigate a handful of very peculiar, non-representative conditions. When schedule and resources are limited, other potential threats that are easier to foresee but seem extremely improbable are often neglected. One example is the treatment of multiple hardware failures. If individual failures are assumed to be statistically independent, the probability of multiple simultaneous failures is very small. However, while statistical independence is a common assumption in probability classes because it makes calculations easier, it rarely applies in the real world. Because satellites and ground receivers are similar, if not identical, the presence of a failure in one unit may suggest a common cause or at least a common vulnerability, meaning that the probability of additional failures is much higher than independence would suggest. Thus, assuming independence by default could lead to neglecting entire categories of risk that are more threatening than the worst-case events that dominate specific risk.
Maximum WAAS Errors, Protection
To investigate the conservatism built into SBAS and GBAS specific risk assessment, maximum WAAS horizontal and vertical position errors over time (as measured by the Performance Analysis Network (PAN) maintained by the William J. Hughes FAA Technical Center) have been examined and compared to the protection levels computed when the maximum errors occurred. This study begins with PAN Report #8 (covering January to March 2004 — shortly after WAAS commissioning in mid-2003) and extends through PAN Report #34 (covering July to September 2010). Each PAN report covers three months of observed WAAS performance.
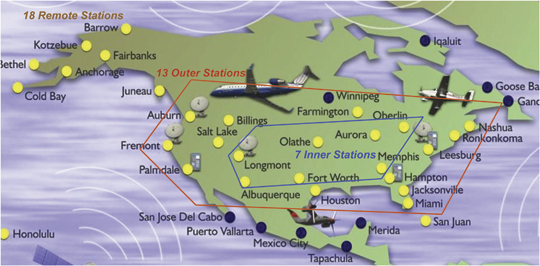
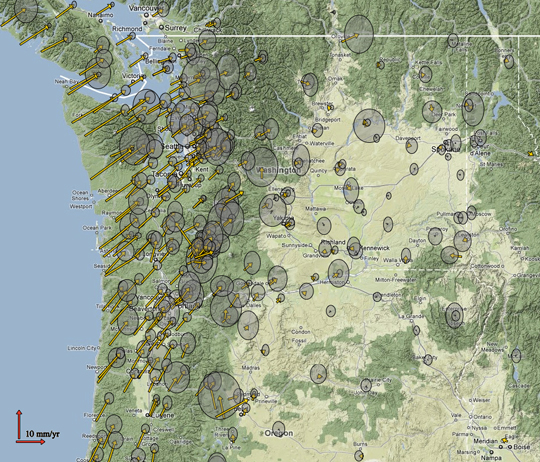
Figure 3 shows the 38 WAAS reference stations (WRSs) used by the PAN to collect position error and protection level information (some of these stations were not active in 2004 and thus were not used in earlier PAN reports). While measurements from these stations are used to generate WAAS corrections and error bounds, they are also used by the PAN as static pseudo-users that compute WAAS-corrected positions and protection levels according to the aircraft user algorithms specified in the WAAS MOPS. The resulting positions are compared to the known, pre-surveyed positions of each station to derive estimates of vertical and horizontal position errors (VPE and HPE) once per second.
Figure 3. WAAS PAN reference station network.
Figure 3 groups these stations into three sets of stations based on their presumed quality of WAAS coverage. These sets are unofficial and were created for the purposes of this study. The seven stations in the inner set are expected to have good WAAS coverage at all times because they are surrounded by other stations. The 13 stations in the outer set are expected to only have acceptable coverage because s
ome of them are at the edges of CONUS. The remote stations provide coverage to the inner and outer regions as well as the best possible coverage of their own regions. Because the remote stations extend beyond the primary coverage region of WAAS in CONUS, errors at these stations are not considered here.
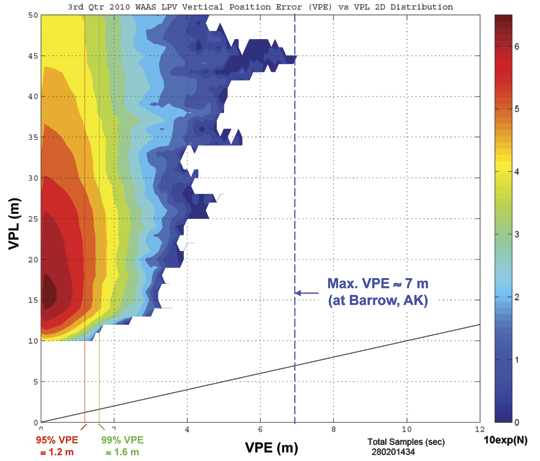
Figure 4 is a 2-D plot of position error versus protection level in the vertical axis (that is, VPE versus VPL) for all epochs and stations during the three months covered by the recent WAAS PAN Report #34 (July 1–September 30, 2010). These results are typical of the entire period since WAAS commissioning in 2003, particularly the last several years. The vertical lines on the plot indicate the 95th-percentile, 99th percentile, and maximum VPEs in this period (1.2, 1.8, and 7 meters, respectively). The maximum VPE occurred at Barrow, AK, which is one of the most remote stations in the WAAS network (see Figure 3). In comparison, the lowest VPLs (intended to be 1–10-7 bounds on VPE) are in the range of 10–15 meters, and values as high as 40 meters are not uncommon. The most demanding approach operation that WAAS supports, LPV-200, allows approaches to a 200-foot minimum decision height and requires that VPL be below a vertical alert limit (VAL) of 35 meters. HPL must also be below a horizontal alert limit (HAL) of 45 meters. When this is not the case, the approach operation is not available; thus these higher VPLs extract a significant cost.
Figure 4. WAAS vertical protection level versus vertical position error (June–September 2010).
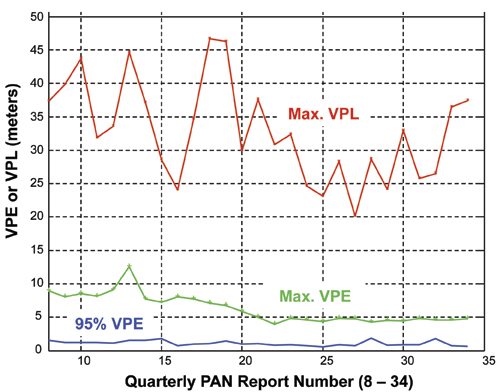
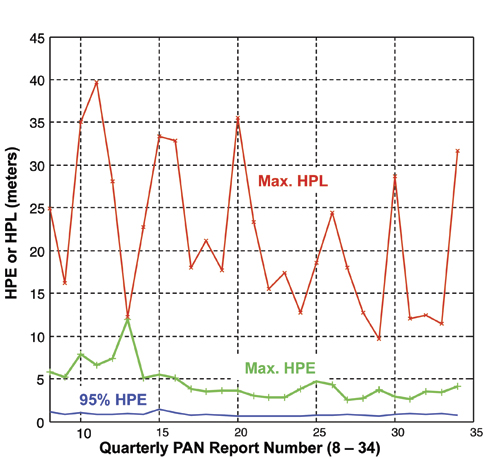
Figure 5 and Figure 6 (for vertical and horizontal errors, respectively) span the entire period of WAAS PAN Reports used in this study. VPL represents the VPL at the station and time of the maximum VPE; it is not the largest VPL recorded at a particular station. The horizontal errors shown in Figure 6 are defined analogously. Note that the station that observes the largest horizontal error in a given PAN report may differ from the one that observes the largest vertical error.
Figures 5 and 6 demonstrate that, while both 95 percent and maximum errors are quite low and are within the expected range of each other, the protection levels associated with the maximum errors greatly exceed them. This pattern is clearer in Figure 5 for vertical errors because maximum VPL tends to be more consistent across PAN reports, but it is true for horizontal errors as well.
Figure 5. WAAS vertical errors and protection levels from 2004–2010.Figure 6. WAAS horizontal errors and protection levels from 2004–2010.
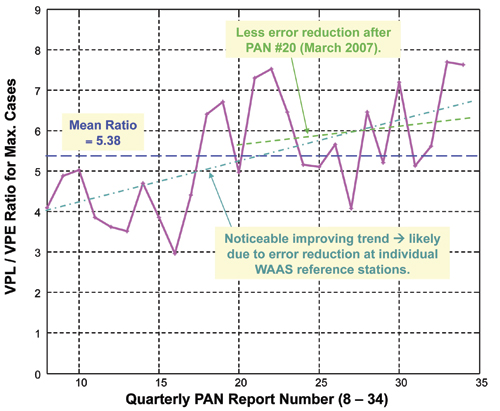
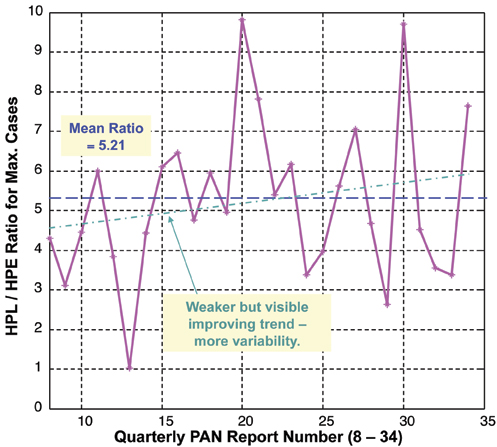
Figures 7 and 8 clarify this relationship by plotting the ratio of VPL to VPE and HPL to HPE for the station and time of the maximum error. The mean of this ratio is very high and is about the same in both cases: 5.38 for vertical and 5.21 for horizontal. Figure 7 shows a steady upward trend in the ratio that is mostly due to WRS improvements that resulted in maximum VPE being reduced over time. This trend is clearly visible in Figure 5 and appears to exceed the weaker trend of lowering VPL due to WAAS algorithm enhancements. The same trend is visible in the horizontal Figures 6 and 8 but is weaker due to the greater variability of maximum HPL over time.
To evaluate the significance of the large PL-to-max-PE ratios in the WAAS PAN database, we need to approximate the number of independent samples from which the maximum errors were derived. As noted before, WAAS protection levels represent error bounds at the 1–10-7 probability level based on specific risk. With one measurement being collected at each operational station every second, a total of about 4.25 billion samples were collected in the PAN reports from January 2004 to September 2010. Note that measurements from remote stations are included in this count, but they are also represented in the conclusions because their PL-to-max-PE ratios are very similar to the ones shown in Figures 7 and 8. Translating this number into the number of statistically independent samples depends on the interval between independent measurements. Because both nominal and rare-event errors affect this interval, it is hard to estimate. Our best guess is a range between roughly 30 and 150 seconds, suggesting that the PAN database contains between 2.8 × 107 and 1.4 × 108 independent samples. Both of these numbers suggest that WAAS protection levels are very conservative from the perspective of average risk.
Figure 7. Ratio of VPL to VPE from 2004–2010.Figure 8. Ratio of HPL to HPE from 2004–2010.
Adjusting for Average-Risk Users
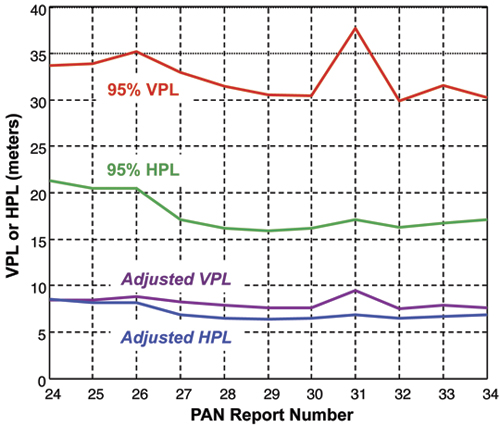
Using the above results, a preliminary estimate of the reduced WAAS protection levels that would apply to average-risk users can be made. Figure 9 shows a comparison between the actual 95 percent WAAS VPL and HPL and the adjusted VPL and HPL potentially achievable with WAAS (for the same 1–10-7 bounding probability) for average-risk users. The actual WAAS VPLs are taken from the more recent WAAS PAN Reports starting from #24 (covering January to March 2008) as the period from 2008 to 2010 includes most of the WAAS algorithm improvements introduced since commissioning in 2003. The actual 95 percent VPLs and HPLs represent the largest reported 95th-percentile values among the stations within CONUS for each quarterly period. The lower adjusted VPLs and HPLs are derived by dividing each VPL by a factor of 4.0 and each HPL by a factor of 2.5. These two reduction factors are derived from Figures 7 and 8, respectively, as conservative estimates of the ratio between protection levels and maximum position errors. Note that the factor of 2.5 for horizontal errors does not include the 12-meter error in Cleveland from PAN Report #13, as this is thought to be spurious (that is, not representative of actual WAAS behavior).
Figure 9. Projected WAAS protection level reductions for average-risk users.
While projections based on these reduction factors are imprecise, they demonstrate the much lower error bounds that non-aviation users with an average-risk safety perspective could achieve. Most non-aviation users operate on land or sea and will be primarily concerned with horizontal error bounds. Figure 9 suggests that the typical 95th percentile WAAS HPLs of 15–20 meters (for the worst location in CONUS) can be reduced to 6–8 meters and still provide a confident 1–10-7 error bound.
It is important to emphasize that these preliminary projections for average-risk users are just that. In order to formally establish new integrity requirements and protection levels for existing systems, the hazardously misleading information (HMI) analyses previously done for these systems need to be redone using the principles of PRA and average risk. While the original development of the WAAS and LAAS HMI analyses was lengthy and resource-intensive, almost all of the detailed work is already complete. As long as the original analyses are available, it is a much smaller task to take these results and create PRAs out of them by extracting the original specific-risk assumptions and applying average-risk principles instead.
LAAS Users. Since the first GBAS ground station design (the Honeywell SLS-4000 LAAS Ground Facility) was certified for CAT I use in 2009 and has not yet been approved for operations at a specific airport, much less data is available to do a preliminary analysis for GBAS similar to the one done for WAAS above. However, the degree of sigma inflation in the parameters broadcast by CAT I LAAS is approximately known, meaning that it can be more-precisely removed from the current LAAS protection levels to estimate what they would be for average-risk users.
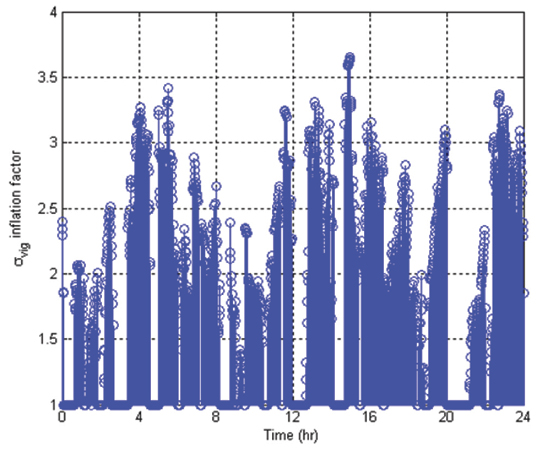
Figure 10 shows the degree of inflation applied to the broadcast σvertical_iono_gradient (or σvig) parameter in order to protect against the worst-case ionospheric anomaly described previously. This result is for the SPS-standard 24-satellite constellation over a 24-hour period at the LAAS installation at Newark Airport, New Jersey (the method used by the Honeywell SLS-4000 is somewhat different). While not all epochs require inflation, a majority cause the nominal σvig value to be increased by a factor of 2 or more, which significantly decreases CAT I availability and currently makes it impossible to take advantage of the Differentially Corrected Positioning Service (DCPS) for non-CAT-I operations.
Figure 10. Typical σvig inflation factors for CAT I LAAS.
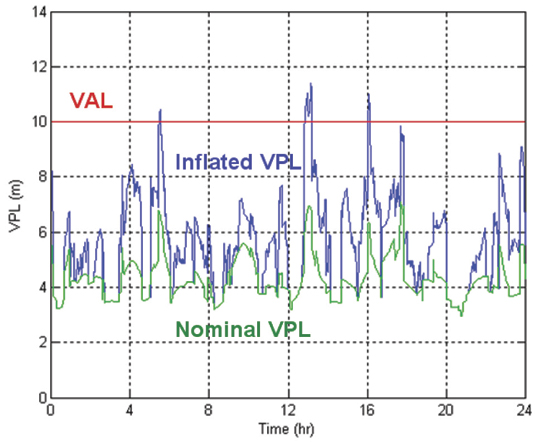
Because of the extreme rarity of the worst-case event that dictates this inflation, it would likely not be needed for average-risk users. Figure 11 shows how much the σvig inflation in Figure 10 increases the LAAS VPL at Newark for the standard 24-satellite constellation. The VPL reduction from removing the inflation is not as dramatic as the potential reductions shown for WAAS in Figure 9, but they are significant relative to the 10-meter VAL for LAAS CAT I approaches. Furthermore, the pre-inflated nominal value of σvig for LAAS is 6.4 millimeters/kilometer, which is much higher than the actual one-sigma nominal gradient value of 1–2 mm/km because, under specific risk, the very worst nominal data must be bounded (also, worst-case tropospheric gradients must also be bounded by σvig). Other broadcast parameters that affect VPL, such as σpr_gnd and the ephemeris P-value that bounds worst-case ephemeris failures, would also be reduced significantly by switching to average risk. Overall, it is likely that LAAS protection levels based on average risk would be reduced from the current specific-risk PLs by about the same range of factors (2–5) observed from WAAS data.
Figure 11. Impact of σvig inflation on LAAS VPL.
User Performance Improvements
This discussion assumes that most non-aviation users who are not encumbered by the history of aviation standards development will prefer to quantify risk using PRA and the average-risk approach. As noted earlier, average risk better matches most users’ intuitive understanding of uncertainty and has the enormous advantage of separating risk quantification from risk aversion. Regardless of how risk-averse or conservative a given operator is, his or her model of risk aversion can be applied most efficiently to a risk-neutral calculation of risk that fairly represents all aspects of uncertainty. Inserting risk aversion into the calculation of risk, as done in the specific-risk approach, is both inefficient and non-optimal from a safety perspective because extensive focus on a few extreme worst-case events drives attention away from other events.
The HPL reductions for average-risk users illustrated here would be significant for many classes of ground and marine transportation users. They would allow operations with tighter physical safety margins to be supported. Users who gain no particular benefit from tighter protection levels would still obtain much higher availability of integrity, as a 25-meter HPL could be supported by much poorer satellite geometries than would otherwise be the case. In other words, users that can tolerate 25-meter horizontal error bounds would be able to operate safely a much higher percentage of the time, because the degree of GNSS constellation deterioration needed to exceed this limit would occur much less often. These benefits do not only apply at the 1–10-7 probability level, as they would scale to the higher probabilities (1–10-4 to 1–10-6) that many non-aviation applications would be most concerned with.
While very few non-aviation users of GNSS today have real-time safety requirements similar to those of civil aviation, the number of such users will likely increase as the coverage of augmented GNSS (and the availability of integrity from standalone receiver-autonomous integrity monitoring, or RAIM) expands. The evolution of standalone civil GPS usage provides a precedent: as basic GPS accuracy improved from tens of meters to several meters, and the cost of user equipment dropped, more and more uses were discovered. A similar, although smaller-scale, trend is likely to occur as the advantages of augmented GNSS become more available and better understood. The primary beneficiaries are likely to be intelligent road-transport systems, train services, and marine transportation in restricted waters.
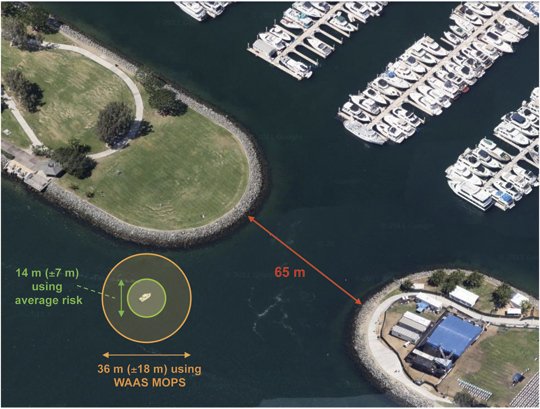
One application where tight real-time integrity bounds would be useful is in harbor and marina entry and exit; see Figure 12, taken from a Google map of a marina in San Diego, California. Based on the earlier analysis, two typical 1−10-7 horizontal protection levels are shown: 18 meters using the unchanged WAAS MOPS approach, and 7 meters based upon modifying the broadcast bounding parameters to represent average risk (these HPLs are bounds on error in either direction, positive or negative; thus the 2-D error bounding circle has a diameter of twice the HPL).
Figure 12. Example of reduced protection levels for harbor/marina access.
When the resulting error bounds are compared, the relative advantage of the smaller bound for this application is immediately apparent. In general, when HPL is significant compared to potential obstacles, its significance varies with the square of HPL rather than HPL itself, as the area being protected matters more than either linear direction. In this example, the ratio of HPLs being compared is 18/7, or 2.57, but the ratio of HPL-squared is much larger: 182/72 = 6.61.
When real-time integrity is not needed, augmented GNSS provides an easy means to guarantee or certify vehicle locations after the fact with great precision and reliability, without the need for post-processing. Vehicle and cargo tracking based on standalone GPS is common today, a certification of the correctness of the tracking data to probabilities suitable for legal or commercial guarantees is lacking. For this, error bounds at 1–10-4 to 1– 10-6 probabilities are likely sufficient, and would allow HPLs of below 5 meters from WAAS and below 3 meters from LAAS. In some scenarios, the difference between a 5-meter and a 15-meter guarantee would be minor, but in others, it could make a substantial difference.
As noted earlier, even for uses where the required HPL (as represented by the safe error limit, or HAL, for a particular application) is satisfied by the existing WAAS and LAAS protection levels, the use of modified average-risk protection levels increases the availability of integrity, which is most often expressed as the probability or percentage of time (over all satellite geometries and othe
r variable system states) that the integrity requirement is met throughout an operation (in simple terms, that HPL ≤ HAL). For user locations within good WAAS or LAAS coverage, the most variable element over time is satellite geometry. Decreasing HPL by a factor of 2.5 or more substantially increases the margin between HPL and HAL and makes it far less likely that the satellite geometry will degrade to the point where HPL exceeds HAL. For example, if the unmodified WAAS HPL equals HAL at an (un-weighted) HDOP of about 1.5, the resulting satellite availability (an upper bound on overall availability) for the SPS-standard 24-satellite GPS constellation would be roughly 98.5 percent. This means that the satellites in view (in this case, all satellites above 5 degrees elevation at a location in CONUS) would provide HDOP ≤ 1.5 about 98.5 percent of the time. However, the modified average-risk HPL (using the factor-of-2.5 reduction) would roughly translate into a limiting HDOP of about 3.75. This allows the required integrity bound to be satisfied by much poorer GPS geometries and gives a satellite availability of greater than 99.9 percent. Thus, when integrity is needed, this much greater availability of integrity is a major advantage.
Summary
SBAS and GBAS broadcasts are freely available to all GNSS users, most of whom will have different definitions of acceptable risk. These users are not optimally served at present and may hesitate to take advantage of SBAS and GBAS as a result.
Using years of collected data for the FAA WAAS system and analysis of the inflation factors built into the CAT I version of the FAA LAAS system, it appears that average-risk users of WAAS and LAAS would be adequately supported by protection levels that are 2 to 5 times lower than those currently derived by aviation users. The fact that two different approaches used to examine WAAS and LAAS suggest similar levels of over-conservatism lends credence to these estimates. While further validation by full-scale probabilistic risk assessments is necessary, we conclude that non-aviation users willing to accept average risk would obtain much better performance and availability from simple modifications to the existing SBAS and GBAS protection level calculations specified for aviation users.
Acknowledgments
We thank the FAA Satellite Navigation Program Office for its support of our research on WAAS and LAAS. However, the opinions expressed here are solely our own. We thank Jim Kelly and Tim Murphy for their explanations of the evolution of today’s SBAS and GBAS integrity requirements. We also thank the FAA Technical Center for its efforts in collecting and publishing WAAS error data over the last decade using its Performance Analysis Network (PAN).
Sam Pullen is a senior research engineer at Stanford University, where he is the director of the Local Area Augmentation System (LAAS) research effort. He has supported the FAA and others in developing GNSS system concepts, requirements, integrity algorithms, and performance models since obtaining his Ph.D. from Stanford in Aeronautics and Astronautics.
Todd Walter is a senior research engineer in the Department of Aeronautics and Astronautics at Stanford University. He received his Ph.D. from Stanford and is currently working on the Wide Area Augmentation System (WAAS), defining future architectures to provide aircraft guidance, and on assuring integrity on GPS III.
Per Enge is a professor of aeronautics and astronautics at Stanford University, where he is the Kleiner Perkins, Mayfield, Sequoia Capital Professor in the School of Engineering. He directs the GPS Research Laboratory and received his Ph.D. from the University of Illinois.
The Earth’s surface is constantly shifting, being deformed as earthquake faults accumulate strain, and slip or slowly creep over time. Not long ago, scientists relied solely on seismometers to monitor the earth’s movements. Today, GPS has taken prominence as an indispensible tool.
PANGA, the monitoring network covering the Pacific Northwest, uses GPS to monitor this movement by measuring the precise position (within 5 millimeters or less) of stations near active faults relative to each other. By determining how the stations have moved, ground deformation can be determined.
If the plates near the coast or the Cascade Mountains move even a few centimeters, the scientists at PANGA know within seconds. The network is still being built, but eventually it’s expected that PANGA will be able to sense earthquakes faster and more accurately than traditional seismometers, and issue alerts to warn citizens of impending activity.
“GPS is helpful in distinguishing magnitude 8 from M9 earthquakes quickly,” explained Rex Flake, PANGA. “By design, seismometers only record high-frequency energy that becomes saturated during strong ground motion. Moreover, seismic data ‘clip’ at high magnitudes whereas GPS become more accurate. Seismographs are mainly intended to detect very small to moderately large earthquakes. GPS gives actual ground motions that in theory could be incorporated very quickly into tsunami models and warning systems. That is one of the things we are working on now.”
Volcano Watch. “A more speculative application is that some (not all by any measure) large earthquakes are preceded by slow creep events,” said Andrew Miner, PANGA. “While not really good enough to predict an earthquake, I think if we saw a very large transient creep event it would at least ring alarm bells. Unfortunately though, earthquakes are by their nature just not very predictable, at least to the level of a day or week that people could reasonably act on. On the bright side, volcanoes are reasonably predictable, and GPS is also an important tool in monitoring them. We work with the Cascade Volcano Observatory on several monitoring projects.”
PANGA is one of a series of earthquake monitoring networks stretching along the West Coast. The Pacific Northwest Geodetic Array is run by the PANGA Geodesy Laboratory at Central Washington University (CWU) in Ellensburg, and includes 300 continuously operating, high-precision GPS receivers located throughout the Pacific Northwest. Sixty more stations are expected to be installed this year. Trimble, Leica, Topcon, and Javad are the main receivers used in the region.
Data from these receivers is continuously downloaded, analyzed, archived, and disseminated. About one third of PANGA’s GPS stations are telemetered in real-time back to CWU, where the data are processed using NASA’s Jet Propulsion Laboratory’s GIPSY/OASIS II software for high-precision data analysis, and Trimble’s RTKNet Integrity Manager software for real-time analysis. The data provide relative positioning of several millimeters across the Cascadia subduction zone and its metropolitan regions. These real-time data are used to monitor and mitigate natural hazards arising from earthquakes, volcanic eruptions, landslides, and coastal sea-level hazards.
Sagging Bridges. The data are also used to monitor man-made structures such as Seattle’s sagging Alaska Way Viaduct, the State Route 520 and Interstate 90 floating bridges, and dams throughout the Cascadia subduction zone, including those along the Columbia River. For instance, for the S.R. 520 bridge, PANGA teamed up with Washington State Department of Transportation (WSDOT) to monitor movement of the 520 bridges during wind storms and seismic events.
The receivers continuously monitor and record structural deformation with about a millimeter precision. Raw GNSS satellite phase and pseudorange estimates are acquired and processed continuously into receiver positions estimated every 5 seconds and delivered with 10 and 30-second latencies. Daily-averaged receiver positions computed with predicted and post-processed satellite orbit and clock corrections are provided with 1-6 day latencies.
Seattle’s aging Alaska Way viaduct is one of several major man-made structures being monitored by PANGA’s GPS Network. (photos courtesty of CWU Geodesy Lab.)
Tremor Slips. The Northwest is at the forefront of earthquake-related GPS research, in large part because the area provides a lot to learn from GPS monitoring, Flake said. “For example, when we started it was strongly suspected but not definitely known that the Cascadia subduction zone was locked over parts of its surface and a major earthquake threat. Thanks to GPS monitoring we now have a pretty good idea not only exactly where it is locked, but also when parts of it do slip or creep.
“One important discovery made with GPS data, along this line, was that of the Episodic Tremor Slip (ETS) events that occur here in the Northwest U.S.,” Flake said. “Since the time duration of ETS motion takes place on the scale of days to weeks, these earthquake events were unrealized by traditional seismic detection methods.”
GPS data shed light on this peculiarly predictable earthquake phenomenon. “With these GPS data we can measure strain accumulation within the continental crust (where people live) and calculate the residual that can be expected to rebound in a large subduction zone earthquake,” Flake said.
“Even more detailed than that, we can use GPS data from past ETS events to constrain the locked zone of the subducting crustal plate by inferring the amount of slip at depth that best reproduces the observed GPS recordings — important in determining possible magnitude and location of the megathrust earthquakes (Mw = 8 to 9) that will someday occur. This is of obvious concern to society and is a major reason that we lead the geodetic applications of GPS research.”
Data Online. PANGA maintains a website that integrates daily GPS measurements from about 1,500 stations along the Pacific/North American plate boundary, ranging from Alaska to the U.S-Mexico border. Cleaned, network solutions from several arrays are merged and grouped into regional clusters.
Arrow on a Velocity Field Map of Oregon and Washington represent ground motion as measured by GPS at each particular location. The grey circles are 2 sigma error ellipses (click to enlarge.) (photos courtesty of CWU Geodesy Lab.)The PANGA team constructs a bedrock drill-brace geodetic monument at Howard Hanson Dam east of Auburn, Washington. (photos courtesty of CWU Geodesy Lab.)
This blog presents an efficient procedure for directly geo-referencing static 3D laser scans. This is a worthwhile way to obtain the required transformation parameters from the local sensor-defined coordinate system to a global system. Therefore, a multi-sensor systems (MSS) is designed with a phase-measuring laser scanner and 3D positional sensors (see Figure 1). By means of at least one eccentrically mounted GNSS antenna on top of the rotating laser scanner one gets a 3D trajectory of the antenna reference point (ARP). The analysis of the resulting trajectory within a recursive state-space filtering approach (e.g., Kalman filter) yields the transformation parameters (position and orientation) and their full variance-covariance matrix. Apart from the geo-referencing of single laser scans the propagation of the transformation parameter variances to the point clouds is possible. Moreover, an improvement of the obtained direct geo-referencing results by means of matching algorithms (like, e.g., Iterative Closest Point (ICP) algorithm) with consideration of the stochastic point cloud information of each single 3D point is feasible.
Figure 1. Sketch of the MSS (at the Geodetic Institute of the Leibniz Universität Hannover) composed of a phase-measuring laser scanner, GNSS equipment and two single-axis inclinometers.
Overview about the enlisted sensors, their specifications and the algorithm for the transformation parameter estimation
The main characteristic of the terrestrial laser scanning (TLS) technique for engineering geodesy is the immediate data acquisition in 3D space. This is realised with a high spatial resolution (a few millimetres for mean distances of approx. 25 m), as well as with a very high frequency (up to 50 profiles per second) in a relative or local sensor-defined coordinate system. The TLS technique can be used in a static or a kinematic mode. Static scanning is characterised by one single fixed translation and orientation of the laser scanner in relation to an absolute or global coordinate system. For kinematic scanning, where the data acquisition is commonly reduced to 2D profiles, the translations and orientations are time-dependent. Hence, the transformation parameters for each profile are different in relation to each other as well as to an absolute or global coordinate system. When a combination of several static scans from different stations into one coordinate system (registration) is required, the transformation parameters for each scan have to be determined. For an additional link to an absolute or global coordinate system (geo-referencing), typically control points in a known geodetic datum are necessary. By the direct observation of the required transformation parameters by means of GNSS equipment and arbitrary navigation sensors, one can solve the registration and geo-referencing in one single step without the need of additional control points.
At the present developmental stage of the MSS (at the Geodetic Institute of the Leibniz Universität Hannover), it is composed of a phase-measuring laser scanner, one eccentrically mounted GNSS antenna and two inclinometers on top of the rotating laser scanner (cf. Figure 1). Hereby, the horizontal rotation of the laser scanner of at least 360 degrees is suitable to derive the position as well as the azimuthal orientation of the laser scanner.
Currently, the GNSS data processing is done in post processing. In general, real-time processing is possible within the purposed geo-referencing procedure. The practicability within the direct geo-referencing procedure due to expected higher variances for the trajectory points of the ARP has to be investigated in the future. However, the short high frequent trajectory of the ARP makes the GNSS analysis a challenging problem which has to be overcome. The overall duration is about 15 min with up to 20 hz data rate. In this approach the alternating antenna orientation with respect to an earth-centred earth-fixed coordinate system will contribute to the error budget due to the right-hand circular polarisation of the satellite signals and the azimuthally varying phase centre corrections (PCC). In addition, near-field effects caused by the antenna adaption (made from aluminium) on the laser scanner, or possibly multipath from the vicinity surrounding the scanner may contribute to the error budget. Investigations of these GNSS related errors yield to no significant impact of the used antenna adaption within a double difference analysis in the observation domain. As expected, the rotated PCC against the original PCC has an effect of up to 5 mm in the observation domain which corresponds to the horizontal offset components of the used GNSS antenna. The analysis in the coordinate domain also indicates an effect of up to 5 mm. The analysis shows that the PCC effect is dominated by the phase centre offset components. One can conclude that within the currently applied epoch-wise GNSS analysis the effect of rotated PCC has no significant impact on the transformation parameters in the geo-referencing procedure. For further details about these investigations please refer to Paffenholz et al. (2011).
The analysis of the 3D ARP trajectory (cf. Figure 2) is performed within an adaptive extended Kalman filter (aEKF). This yields the transformation parameters (position and orientation) alongside their full variance-covariance matrix. The benefits of using a closed form algorithm on the basis of a Kalman filter (KF) are the following: Firstly, the KF allows real-time data processing, and secondly, the parameter estimation will be less sensitive to outliers. To deal with non-linearities in the system and measurement equations, an extended KF (EKF) is used to estimate the transformation parameters of the MSS. Another promising approach for a non-linear state estimation is the combination of Sequential Monte Carlo filtering (also known as particle filter) and an EKF, which was proposed by Alkhatib et al. (2011). The main benefit of the proposed approach is the better performance in case of high-nonlinear state-space equations. An improvement of the dynamic model of the EKF can be achieved by augmenting the EKF with adaptive parameters. These parameters are time invariant and system-specific with well-known initial values. For further details please refer to Paffenholz et al. (2010).
Figure 2. Sample ARP trajectory of a 360 degree rotation of the laser scanner around its vertical axis. Red indicates the original10 hz measurements with a Javad GNSS receiver Delta with Javad GrAnt-G3T antenna. Blue and green indicate the predicted and filtered trajectory within the aEKF approach, respectively.
Performing the direct geo-referencing by applying the transformation parameters and calculation of the uncertainty measures of the 3D point cloud
The final step of the purposed direct geo-referencing procedure is to apply the transformation parameters (translation vector as well as at least the azimuthal orientation) to the 3D point cloud. The three spatial rotation parameters can be reduced to the azimuthal orientation in case of a sufficient sensor orientation to the direction of gravity. The left part of Figure 3 shows the transformation result from the local sensor-defined to an absolute coordinate system in the case of two 3D point clouds, each from a different static scanner station (red and blue). The radial distance between the scanner and the object is 15 m and 20 m, respectively. It is obvious, that the two geo-referenced point clouds have a slight misalignment of a few centimetres. Due to the known absolute coordinates of the pillar on the roof of the building (middle part of the figure), one can conclude that the geo-referencing of the blue point cloud is inaccurate. Moreover, the variances for the transformation parameters from the blue station are higher than the variances for the red station. This leads to the conclusion that the estimated transformation parameters for the blue station are not reliable. Nevertheless, this direct geo-referencing can be used as adequate pre-registration for matching algorithms.
To overcome this misalignment the application of matching algorithms, like the ICP algorithm, is worthwhile. As input for the ICP algorithm the pre-registered 3D point clouds are used. The a-priori alignment (within a few centimetres) of the two point clouds is sufficient for the application of the ICP algorithm to find an adequate amount of corresponding points for a reliable estimation of the transformation parameters. The ICP result is shown in the right part of Figure 3. One can clearly see that the matching of the two point clouds was successful. The recent topic of the ongoing research is the consideration of the uncertainties of each point cloud within the ICP algorithm for a further improvement of the matching results. Figure 3. Left: Applied transformation parameters to two scans from different stations (red and blue). Right: Result after running the ICP algorithm on the pre-registered 3D point clouds (shown in the left part of this figure).
In the current research work uncertainties for each single point cloud are calculated by variance propagation: Combining the uncertainties of the scanner measurements (e.g., manufacturer values for the angle and range measurement accuracy), and the uncertainties of the direct geo-referencing procedure (variance-covariance matrix of the transformation parameters obtained within the aEKF). As mentioned before, these uncertainties should be considered in the ICP algorithm in the ongoing work for a further improvement of the matching results. Bae et al. (2009) already stated that the consideration of positional uncertainties in the point cloud matching will be a worthwhile approach to improve the matching, as well as the interpretation of 3D point clouds. An example for the result of the variance propagation of the scanner and direct geo-referencing uncertainties is illustrated in Figure 4. The figure depicts a stochastic point cloud of the red station (similar 3D point cloud as shown in Figure 3). As measure for the uncertainty the mean of the coordinate uncertainty in a range of 5 mm up to 30 mm is shown.
Figure 4. Stochastic point cloud of red station resulting from variance propagation for the uncertainties of the scanner measurements and the direct geo-referencing procedure. Depicted is the mean of the coordinate uncertainty.
Conclusions and Future Work
This article describes an on-site direct geo-referencing of 3D static laser scans by means of tracking the circular motion of the laser scanner around its vertical axis with 3D positioning sensors. The required transformation parameters from the local to an absolute coordinate system are estimated within a Kalman filter approach. The results show a misalignment for two different static laser scanner stations in a range of a few centimetres. Nevertheless, this is an adequate pre-registration for matching algorithms. Besides the geo-referencing, the uncertainties of the 3D point clouds are calculated by variance propagation. The future work is focused on the consideration of the stochastic point cloud information within matching algorithms (like, e.g., ICP) for an optimal fusion of different (pre-) registered point clouds into one optimal solution.
References
Alkhatib, Hamza; Paffenholz, Jens-André; Kutterer, Hansjörg (2011): Sequential Monte Carlo Filtering for nonlinear GNSS trajectories. In: Sneeuw; Novák; Crespi and Sansò (Eds.): Proceedings of the VII Hotine-Marussi Symposium on Mathematical Geodesy, Rome, 6-10 June 2009. International Association of Geodesy (IAG). 1st Edition. Berlin, Heidelberg: Springer, (in press).
Bae, Kwang-Ho; Belton, David; Lichti, Derek D. (2009): A Closed-Form Expression of the Positional Uncertainty for 3D Point Clouds. In IEEE Trans. Pattern Analysis and Machine Intelligence 31 (4), pp. 577–590.
Paffenholz, Jens-André; Kersten, Tobias; Schön, Steffen; Kutterer, Hansjörg (2011): Analysis of the Impact of Rotating GNSS Antennae in Kinematic Terrestrial Applications. In: Proceedings of the FIG Working Week 2011. FIG. Marrakech, published on CD only / also available via www.fig.net.
Paffenholz, Jens-André; Alkhatib, Hamza; Kutterer, Hansjörg (2010): Direct geo-referencing of a static terrestrial laser scanner. In JAG 4 (3), 115–126.
Jens-André Paffenholz received his Dipl.-Ing. in Geodesy and Geoinformatics at the Leibniz Universität Hannover. Since 2006 he has been research assistant and since 2008 also PhD candidate at the Geodetic Institute at the Leibniz Universität Hannover, respectively. His current interests are: terrestrial laser scanning, industrial measurement systems, and process automation of measurement systems. The present research focus is: precise direct geo-referencing in terrestrial laser scanning applications.
Recent events, some of them summarized here, may appear to have dealt setbacks to LightSquared, the boundless opportunist of wireless broadband that just happens to interfere with GPS. But the company has not run out of moves yet. Would you, if you had $20 billion at stake? The latest gambit, led by lawyers and cloaked in jargon, appears to be an end-run around the U.S. government to appeal to the International Telecommunications Union, which has ultimate and international authority over spectrum. Watch out, GLONASS and Galileo — and U.S. troops operating in foreign theaters.
GPS World has received copies of three “fact sheets” authored by two lawyers and a strategic consultant. The documents are addressed to ITU-R WP 4C, the International Telecommunications Union Working Party that handles mobile satellite services (MSS) and radio determination satellite service (RDSS spectrum) and orbits. One document is titled “ Compatibility between Complimentary Ground Componenet in the 1525–1559 Mhz and 1626.5–1660.5 Mhz Bands and Other Service.” All three documents appear to be cover sheets for longer treatises, and their language and citations are not entirely clear to me, as my legal and regulatory background leaves something to be desired.
However, they announce their purpose as “to modify and refine the example methodology to calculate aeronautical mobile satellite (route) service spectrum requirements,” and “to address ongoing Integrated Mobile Satellite Service Complimentary Ground Component compatibility matters,” and finally “to update the Integrated Mobile Satellite Service Complimentary Ground Component technical characteristics based upon the most recent information regarding CGC deployment plans in this frequency band.”
One source familiar with the documents, who did not wish to be named, commented that “One should interpret what LightSquared is doing with ITU as a bellwether indication of intent to use the whole band at the full authorized power, no matter how they spin ‘protect GPS’ in their press releases.
“At first blush, the filings look innocuous; let me assure you, they are not. This is the first salvo. Watch what they do, much more than what they say.
“These are fact sheets intended to inform the U.S. government that LightSquared intends to develop papers with the intent to get the U.S. government to approve the papers to be sent to the ITU WP-4C, the Working Party that handles MSS and RDSS spectrum & orbits. The ultimate goal is to work internationally to allow LightSquared to allow ancillary terrestrial component (ATC) broadcast globally.”
In other developments, going now in reverse chronological order, from most recent to early June:
Congressional Activity
On June 23, the U.S. House of RepresentativesAppropriations Committee approved the fiscal year 2012 Financial Services and General Government Appropriations bill. One amendment to the bill prohibits funding for the Federal Communications Commission (FCC) to remove conditions on or permit certain commercial broadband operations until the FCC has resolved concerns of harmful interference by these operations on GPS devices. The amendment was adopted on a voice vote. More details here.
Previously, on May 27, the U.S. House of Representatives passed a bill stating that the FCC shall not provide final authorization for LightSquared operations until Defense Department concerns about GPS interference have been resolved. The bill then went to the U.S. Senate for its action.
The House actions and a letter to the FCC signed by 32 U.S. senators may presage a showdown over the issue between Congress and the president, who has promised increased broadband access. A 4G wireless network providing this access could be facilitated by LightSquared sales of service via its tower transmitters to wireless carriers. LightSquared has already signed a $20 billion, 15-year deal with Sprint.
Money Talks
A report on “The Economic Benefits of Commercial GPS Use in the United States and the Costs of Potential Disruption” was presented by during a June 21 webinar sponsored by the Coalition to Save Our GPS. The report estimates that “the direct economic benefits of GPS technology on commercial GPS users are . . . over $67.6 billion per year in the United States,” but also that ““the direct economic costs of full GPS disruption to commercial GPS users and GPS manufacturers are estimated to be $96 billion per year in the United States.” Final Report Withheld
At the last minute of a June 15 deadline for the final Working Group report on interference, LightSquared asked for a two-week extension. Federal regulators granted the request, and the final report is now due on July 1.
A spokesperson for the Coalition to Save Our GPS revealed that “The Working Group results show devastating interference to GPS and no proven method of mitigation. Delay will not change these results. These results are the same results the FCC had had before it granted the waiver.”
Some Solution. Three days after requesting the delay, LightSquared announced it had solved the problem, by proposing to broadcast only from the lower end of its permitted spectrum band. GPS experts countered that this would still disable the functioning of high-precision receivers.
“This comes out of the blue, without the knowledge, agreement or consensus of the industry group studying the problem,” riposted the Coalition to Save Our GPS. “That may well be because virtually nothing has actually changed in this “new” proposal relative to what LIghtSquared pledged at the outset of testing. The power levels don’t change. Nor do the frequencies. In fact, the only thing that has changed is the order in which the channels within the band adjacent to GPS would be deployed.
“LightSquared’s announced “solution” has two components:
“1. LightSquared acknowledges that “[e]arly test results indicated that one of LightSquared’s 10MHz blocks of frequencies poses interference to many GPS receivers.” LightSquared states that for “the next several years” it would not operate in this band – which is directly adjacent to GPS spectrum and is referred to as the “upper MSS band.” During this period, LightSquared would commence operations in a second 10 MHz block of the MSS band , referred to as the “lower MSS band,” slightly further away from GPS.
“2. According to the proposal ‘LightSquared will modify its FCC license to reduce the maximum authorized power of its base-station transmitters by over 50 percent. This action will limit LightSquared to the power it was authorized to use in 2005.’
“This so-called solution is not a solution in any shape, form or fashion,” continues the Coalition. “This is not a move to an alternative frequency band. Nor is it a reduction in power relative to what has been tested from the beginning. The “solution” would cause massive disruption to many critical U.S. economic sectors, initially including public sector users of high precision GPS, later followed – af
ter “the next several years” — by other GPS users. The only real solution to the LightSquared interference problem is to move out of the MSS band altogether."
The Air Transport Association and the Aircraft Owners & Pilots Association told Congress that the only acceptable mitigation is for LightSquared’s operations to be moved outside of the L-band and away from GPS. “With so much of the early evidence showing that LightSquared’s proposed network would potentially endanger nearly every flight operating in U.S. airspace, it seems evident that no further development of this system can be allowed.”
Military Report Calls for FCC Retreat
The National PNT Engineering Forum concluded after testing classified and GPS receivers under LightSquared terrestrial transmission conditions: “Significant concerns remain that operation of an ATC integrated service as originally envisioned by the FCC cannot successfully coexist with GPS.”
The NPEF report calls for rescinding the FCC waiver for LightSquared terrestrial transmissions, conducting more thorough studies on impacts, and revisiting the 2003–2010 authorizations. The group tested a variety of military receivers under classified categorization, also known as “government receivers.” Rebuttals Distort Record
Claims by LightSquared’s Carlisle and FCC chair Julius Genachowski, that the GPS industry knew long ago about LightSquared’s plan for powerful terrestrial transmitters, contradict the truth. Examination of FCC filings show that the GPS industry knew about and agreed to a plan by a previous ownership of the company, for a different purpose, with a different business concept, and employing a completely different technological approach, one that would not have harmed GPS transmissions and disabled GPS users the way the current LightSquared plan does.
The terrestrial broadband operations first unveiled in November 2010 cannot be described as ancillary to the purpose for which Lightsquared predecessors Motient, MSV, and SkyTerra received their spectrum and licenses — that is, to provide a service that was primarily a mobile satellite service. The November letter to the FCC described a new business model that turns the original concept on its head. LightSquared for the first time revealed plans to build a “nationwide network of 40,000 terrestrial base stations,” and stated that “the capacity of its fully deployed terrestrial network across all base stations will be tens of thousands of times the capacity of either of [its] satellites.”
The deviations from established policy required to accommodate LightSquared’s new business model are not technicalities. They represent a fundamental change to a complex and interrelated set of rules that were carefully designed to protect GPS users from interference.
The predecessor companies had to protect their own primary satellite operations from interference. The protection that their own satellite operations required was also sufficient — at that time — to protect GPS receivers. The terrestrial network and powerful signal LightSquared now proposes bear no resemblance to the operations the FCC authorized in 2003.
At its June 9–10 meeting, the National Space-Based Positioning, Navigation and Timing (PNT) Advisory Board found that GPS services cannot be assured if the LightSquared plan is approved, and that the only viable option for continued availability of GPS as well as new wireless broadband is to find another spectrum for LightSquared not adjacent to the GPS frequency.
The formal recommendation reads: “The provision of GPS services cannot be assured if the LightSquared proposal for satellite and terrestrial broadband provision using the MSS L-Band receives final approval.
“The only reasonable and viable option to continue ubiquitous availability of GPS and the provision of a new 4G wireless broadband capability would be for the FCC to assign an alternate frequency spectrum to LightSquared that has little or no probability of affecting the delivery or utilization of GPS/GNSS services.”
During its meeting, the Advisory Board heard directly from one representative of LightSquared, the company’s executive vice president, regulatory affairs and public policy, Jeff Carlisle, and from Jim Kirkland, vice president and general counsel, Trimble Navigation, speaking on behalf of the Save Our GPS Coalition. "Without knowing otherwise," commented one observer, "one might have thought they were talking about two different sets of FCC actions. Their interpretations of FCC actions were completely orthogonal to each other."
During the discussion, one Advisory Board member, a former governor of the state of Wyoming, told presenter Jeff Carlisle of LightSquared, “Your definition of mitigation seems more tied to a legal argument than a common-sense argument.”
Other speakers on the LightSquared/GPS panel included Dean Bunce, co-chair of the National PNT Engineering Forum (NPEF), which has had responsibility for testing various classified GPS receivers under LightSquared conditions; and Robert Frazier of the Federal Aviation Administration (FAA) Spectrum Planning and International Office.
Another observer at the Advisory Board meeting opined of the LightSquared presentation and subsequent replies to questions from board members, “I’ve seen weasels before, but not like this. Misinformation, mis-statements, reversals and take-backs, outright lies.”
Tests Slam Hi-Precision Receivers
Data from Las Vegas field tests show that wide-bandwidth, high-precision GPS receivers started feeling the effects of the LightSquared transmission about 1,800 meters from the tower. Medium-bandwidth high-precision GPS receivers started feeling the effects of the LightSquared transmission at about 1,200 meters from the tower. In each case, there was about a 200-meter buffer from when the GPS receivers started to feel the effects of the LightSquared transmission to the GPS receiver being jammed, at 1,600 meters and 1,000 meters respectively. For further details, see this article.
GPS World has received further details of the tests but not an authorization to publish them yet.
Deere & Company, a major provider of precision agriculture equipment and services, notified the FCC on May 26 of substantial interference with its GPS receivers by the LightSquared signal. Deere receivers registered impact of and interference by the LightSquared signal as far away as 22 miles from a transmitter. Further, the company has found no practicable technical solution to the problem.
Originally, the LightSquared/GPS Technical Working Group’s (TWG) report was due to the FCC on June 15, 2011. LightSquared requested from the FCC, and received, a two-week extension to submit their report. Three days later, LightSquared announced it found a solution to the GPS interference problem. Its new proposed solution is not good news for the high-precision GPS user community. Instead, it’s a threat directed squarely at high-precision GPS users like you and me. Do you recall what I wrote a month ago? It’s ringing true with the latest LightSquared proposal.
“I’m going to keep this simple. You, the high-precision GPS user, are likely going to be considered collateral damage.
The military is going to be accommodated in the name of national security. The aviation industry is going to be accommodated in the name of safety-of-life. The auto navigation industry is going to be accommodated because they are high-profile. The high-precision user is going to be thrown under the bus because we are the most difficult to accommodate (technically) and don’t have a high profile nor are perceived as significant enough to accommodate.”
If you recall, the TWG consists of LightSquared and GPS industry representatives tasked with testing the effect that LightSquared’s proposed system may have on GPS. Four of the five sub-teams were ready to file their final report with the FCC on June 15. LightSquared’s sub-team, according to the Coalition to Save Our GPS webinar on Thursday June 16, was only sub-team not ready to file its report.
Ok, so after the FCC granted LightSquared the two-week extension, I’m thinking we have a two-week hiatus from the LightSquared discussion as LightSquared compiles and prepares their July 1 submission.
LightSquared’s solution is to temporarily abandon the upper frequency they originally planned to roll out (1550-1555 MHz) and rollout its service using the lower spectrum I refer to as “modified” (1526-1536 MHz) in Figure 1.
It’s important to remember that the lines separating frequency spectrums are not “brick walls.” There is signal “roll off” that results in a gray area between spectrums. That’s the reason the LightSquared upper frequency at 1550-1555 MHz was slamming GPS. Even though it is apparently separated from GPS L1, the sheer power of the LightSquared signal at 1,500 watts significantly bled into the red RNSS zone (1559-1610 MHz) in Figure 1.
Figure 1: FCC Spectrum Dashboard
Using only the lower frequency spectrum (1526-1536 MHz), LightSquared claims that they are “largely free of interference issues with the exception of a limited number of high-precision GPS receivers that are specifically designed to rely on LightSquared’s spectrum.” LightSquared’s CEO said that this solution will accommodate 99.5% of the GPS receivers.
Uh oh, guess who the remaining .5% are? Yes, your high-precision GPS receiver. One half of one percent is about the percentage of high-precision GPS receivers with respect to the total GPS market size in the U.S.
I’m pretty confident that LightSquared isn’t weighting the receivers, so that means a $2 GPS chip inside a mobile phone carries the same weight as your $15,000 RTK receiver. But obviously the impact on our infrastructure and economy differs by orders of magnitude between the two.
Remember last month when I wrote that high-precision GPS receivers might be thrown under the bus and considered collateral damage (LightSquared: It’s Worse than You Think)? The latest LightSquared proposal is what I was referring to. High-precision GPS receivers are the most difficult to accommodate, and LightSquared is thinking that if they tell the FCC (and the world) that they’ve taken care of 99.5% of the GPS receivers in the U.S., the other .5% can deal with it.
It’s not yet clear how LightSquared broadcasting on 10L (1526-1536 MHz) will affect high-precision receivers. We should see some of those details at the end of the month when all reports are filed with the FCC.
But either way, it’s clear that LightSquared broadcasting in the 1526-1536 Mhz spectrum would slam OmniSTAR and Deere & Co. Starfire users as you can see in Figure 1.
Not so fast, say GNSS engineers. What about GLONASS, Galileo, and Compass?
Russia’s GLONASS satellites are increasingly being used by high-precision receivers. In fact, it’s safe to say that all major manufacturers sell GPS/GLONASS receivers, which is an expensive option on most receivers. However, it’s relatively easy to justify the additional expense due to the productivity gains from the additional GLONASS satellites. Generally speaking, more satellites equals less down-time.
The problem is that the U.S. government has no vested interest in protecting the GLONASS spectrum.
The FAA doesn’t care about it. The U.S. military doesn’t care about it. The first-responders don’t care about it. Although GLONASS is starting to show up in consumer GPS chips, it’s not being used in those markets like it is in the high-precision markets such as surveying, engineering, construction, agriculture, GIS, and various machine control applications. Therefore, no GLONASS testing was performed at the Maryland test site (simulator not configured to output GLONASS) and little or no testing was done using GLONASS at the New Mexico or Las Vegas sites unless individual companies took it on themselves.
Some say that GLONASS will get hammered by LightSquared mobile phones.
To this point, most of the talk has been about GPS interference from LightSquared transmitters in the 1525-1559 MHz spectrum. We also need to be aware of LightSquared mobile phones, of which they intend to field 250 million — 100 million by the end of 2012. While LightSquared has control over the filtering on their transmitters, it have no control over the filtering used in mobile phones designed to use their system.
I’ve heard there is some mention of LightSquared mobile phones in the reports that are to be filed with the FCC, but not made public yet. However, no LightSquared mobile phones exist today so it’s only possible to simulate them in a lab environment using a lot of design assumptions.
The uplink frequency used by LightSquared mobile phones (to talk to the nearest tower) is in the range 1626.5-1660.5 MHz. That frequency is getting close to the top end of GPS and really close to GLONASS L1 which has a range of ~1598-1605.4MHz.
According to one RF engineer I’ve spoken to, “We already know that Iridium (1616-1626.5 Mhz) and Inmarsat cannot co-exist in the upper band and seeing that the LightSquared handset transmit frequency is in that same spectrum, I think GLONASS in the U.S. is toast.”
The future of GNSS receivers is definitely trending towards integrating GPS, GLONASS, Galileo, Compass, etc. signal
s. A section of the NPEF report (mentioned above) succinctly describes the interference issue with GNSS receivers.
Another approach examined involves limiting the LightSquared transmissions to the lower 5 or 10 MHz channel of their planned deployment. However, while this approach would protect a limited number of GPS applications other applications would still be susceptible to interference. Using this approach it may be possible to protect classes of GPS receivers, primarily those with greater receiver selectivity. However, some classes of GPS receivers would still not be protected under this mitigation technique. Receivers having wider RF front-end characteristics, such as those used for scientific and commercial uses requiring high-precision measurements, and some receivers capable of receiving multiple signals from different GNSS systems (e.g., GLONASS) would remain susceptible. Additionally, the use of only the lower LightSquared channel would provide only a temporary solution to the existing interference problems as 4G LTE levels of service may not be possible. Thus, even if allowed, the FCC’s objectives and service conditions on the LightSquared license would not be met.
Finally and on a slightly different note, the future GPS L1C signal and L1 signals proposed by Galileo and Compass are a wider band than the current GPS L1 CA, which means they are likely more subject to interference from the LightSquared system.
FCC Chairman Julius Genachowski: “As I have stated previously to Congress, the commission will not permit LightSquared to begin commercial service without first resolving the commission’s concerns about potential widespread harmful interference to GPS devices. Under no circumstances would I put at risk our nation’s national defense or public safety.”
The FCC has stated on numerous occasions that LightSquared won’t be allowed to begin commercial service until GPS interference issues are resolved, but what does that really mean?
Chairman Genachowski has also stated that “It should come as no surprise to anyone involved in the LightSquared matter that the company was planning for some time to deploy a major terrestrial network in the spectrum”. He’s implying that all parties involved should have prepared for this moment, and if the GPS industry didn’t, it should bear some of the burden. This is bad news indeed.
Bottom line: The FCC is not looking out for your interests. The National Broadband Plan is heavy on their minds. I can clearly see the FCC thinking “in the interest of the bigger picture, the high-precision GPS user community can deal with it since its only .5% of the total GPS market.”
We need to squash this new proposal by LightSquared in a hurry. It’s a threat directed squarely at the high-precision GPS user community.
LightSquared Consultant claim:in the GPS industry’s “insatiable thirst for precision,” it made poor engineering decisions that made GPS receivers more vulnerable to interference from neighboring bands.
Although it appears the statement is from an independent consulting firm, PRTM consultant Dan Hays is a Harbinger crony so don’t let it fool you into thinking it’s anything but another piece of LightSquared propaganda.
But, let’s visit the subject for a minute to clarify because LightSquared has also claimed that high-precision GPS receivers are somehow at fault because they “are looking in our spectrum”.
Jim Kirkland, VP and General Counsel for Trimble Navigation, said it well when I presented Mr. Hays’ statement during the Coalition to Save Our GPS webinar last Thursday. Mr. Kirkland responded:
“… we’ve engineered our products to use services that are available for payment to LightSquared’s predecessors. That’s a critical point…these precision receivers are designed to receive MSS signals to make the services better and they pay for those services to Skyterra (owned by LightSquared) and Inmarsat (LightSquared vendor). So if that’s a bad design decision that we decided to design our receivers so that our customers could pay money to Skyterra (LightSquared), that’s one of the more absurd things I’ve heard in this whole debate.”
What he’s talking about is that OmniSTAR pays SkyTerra (LightSquared) to lease bandwidth on their satellite to deliver corrections to high-precision GPS users on the ground. Yes, if you pay OmniSTAR for their VBS, HP, or XP service, then a portion of what you pay goes to LightSquared. The irony is as thick as molasses. Furthermore, Deere & Co/Navcom offer a similar service called Starfire in which they lease satellite bandwidth from Inmarsat. LightSquared and Inmarsat are connected. Based on an original agreement signed in December 2007 between LightSquared’s predecessor and Inmarsat, Inmarsat is to receive hundreds of millions of dollars from LightSquared towards “the re-banding and efficient reuse of L-band radio spectrum covering North America.”
Essentially, what LightSquared is doing is selling the GPS industry their satellite-to-earth wireless services (a la OmniSTAR), but they are complaining that the GPS industry has designed GPS receivers to utilize services in which LightSquared gets paid. Is that a “poorly designed GPS receiver”?
I’ve even heard, through the grapevine, that some legislators are regurgitating this nonsense of “poorly designed GPS receivers.” Maybe there’s no ill-intent, but it’s either that or a fair amount of ignorance.
Logically, many of today’s high-precision GPS receivers have OmniSTAR/Starfire capability built into their antennas and RF front-ends to look into the 1525-1559 Mhz spectrum for the OmniSTAR/Starfire signals. They don’t focus on particular frequencies in that band because the frequencies change periodically as OmniSTAR users can attest. Also, even if you have the OmniSTAR/Starfire capability turned off in your receiver, the antenna is still designed to look into that band so there’s no way around it.
Like I mentioned earlier, even if your receiver isn’t designed to utilize OmniSTAR/Starfire, no one knows yet if it might be affected by the LightSquared 5L/10L signal.
Where do we go from here?
There’s a lot more to talk about on this issue. It’s as critical as it’s ever been that you make you concerns known to your state senators and representatives as well as the FCC. Scroll to the bottom of this article for web links and contact information.
Free Webinar – Thursday, June 23. LightSquared: What it means to the GPS Surveying/Mapping User Community
Thursday, June 23, I will conduct a webinar to discuss the LightSquared issue as it relates specifically to the GPS Surveying/Mapping community (high-precision users). Joining me will be Dr. Mike Whitehead, VP of Technology at Hemisphere GPS. He’s a leading GNSS design engineer and can speak clearly about the technical ramifications of LightSquared interference on high-precision GPS receivers. Click here to sign up for the webinar. Sign up even if you can’t attend the live webinar on Thursday because you’ll be sent an email on how to view the archived presentation that you can listen/view at your convenience.
Light
Squared coverage at the Esri Survey Summit (July 7-12, San Diego, CA)
On Friday, July 8th @ 2pm at the Survey Summit, I’ll be giving a 60 minute presentation entitled “GPS/GNSS Technology Update” focused on covering the latest developments in GPS/GNSS. I will cover the latest LightSquared news as well as other recent GPS/GNSS technology developments.
On Saturday, July 9th @ 3:30p and 4:00p respectively, Jeffrey Carlisle from LightSquared and Peter Large from Trimble Navigation will give 30 minute presentations on the GPS/LightSquared interference issue.
On Sunday, July 10th @ 8:00a-10:00a there will be a GPS/LightSquared discussion panel consisting of myself, Peter Large, Jeff Carlisle, Curt Sumner (ACSM), John Matonich (NSPS), and Dr. Javad Ashjaee. The panel discussion will be moderated by Joe Paiva. This will be the first panel discussion in the industry focused on the high-precision GPS/LightSquared interference issue.
Following the discussion panel, at 10:30am-Noon, there will be a strategy session designed to plan actions that surveyors (high-precision users) can take to avoid becoming collateral damage.
———————–
Take Action Now
The Coalition to Save Our GPS has posted guidance on its website as to how to submit your comments. They are:
Voice your concerns directly to Congressional Representatives
To voice your concerns about GPS interference, you can send letters, emails, faxes, call or visit your Congressional representatives’ office in person to explain how you use GPS as a local business and what the impacts of interference would be to the local economy.
The Washngton Wire reported this week that “A bipartisan group of 66 House members asked the FCC Tuesday to protect global positioning systems from interference from wireless broadband start-up LightSquared…”
For your ready reference, below are the actions the Coalition is seeking from the FCC:
The FCC must make clear, and the NTIA must ensure, that LightSquared’s license modification is contingent on the outcome of the mandated study unequivocally demonstrating that there is no interference to GPS. The study must be comprehensive, objective, and based on correct assumptions about existing GPS uses rather than theoretical possibilities. Given the substantial pre-existing investment in GPS systems and infrastructure, and the critical nature of GPS applications, the results of studies must conclusively demonstrate that there is no risk of interference. If there is conflicting evidence, doubts must be resolved against the LightSquared terrestrial system. The views of LightSquared, as an interested party, are entitled to no special weight in this process.
The FCC should make clear that LightSquared and its investors are proceeding at their own risk in advance of the FCC’s assessment of the working group’s analysis. While this is the FCC’s established policy, the Commission’s International Bureau failed to make this explicit in its order.
Resolution of interference has to be the obligation of LightSquared, not the extensive GPS user community of millions of citizens. LightSquared must bear the costs of preventing interference emanating from their devices, and if there is no way to prevent interference, it should not be permitted to operate. GPS users or providers should not have to bear any of the consequences of LightSquared’s actions.
This is a matter of critical national interest. There must be a reasonable opportunity for public comment of at least 45 days on the report produced by the working group and further FCC actions on the LightSquared modification order should take place with the approval of a majority of the commissioners, not at the bureau level.
LightSquared Prospects Dimming. Concerns by government and the private sector about GPS interference from LightSquared’s proposed wholesale LTE service accelerates. Government experts just reported that interference with GPS occurred in high portions of LightSquared’s spectrum bands and little in the lower spectrum. The National Space-Based PNT Advisory Board’s tests showed that some GPS receivers lost signal strength while others were fully disabled by LightSquared’s signal. FCC Chairman Genachowski, under fire for granting LightSquared a conditional waiver, has reiterated that he will not permit LightSquared to begin commercial service without first resolving concerns about potential interference to GPS devices.
Genachowski hit back at the GPS community in a letter to Sen. Charles Grassley, “It should be no surprise to anyone involved in the LightSquared matter that the company was planning for some time to deploy a major terrestrial network in the spectrum adjacent to GPS.” Members of the National Space-Based PNT Advisory Board have stated that they and the GPS community were not properly notified when the FCC removed the limit on the number of base stations deployed on this spectrum. And so it goes on. (See also LightSquared, FCC Rebuttals Distort Record.)
Getting Intimate. Mobile phones are the most personal computing devices. How personal? iPass conducted a study of 3,700 mobile employees at 1,000 enterprises worldwide. Sixty-one percent of these mobile workers sleep with their smartphones and 43 percent of those within arm’s reach. It gets worse. 58 percent of those that sleep with their phones at least occasionally, check it during the night. Not surprisingly, almost a third of mobile workers say their relationship with their smartphone causes friction with their partner. I’d say.
Frienemies. In a newly extended agreement, Google will continue to provide archrival Apple with map and search capabilities. This kills rampant rumors that Apple will have a home-grown mapping database ready in the near term. In March, AppleInsider discovered an Apple job listing for an iOS Maps Application Developer to “radically improve” Apple’s location-based services. Even for Apple, a mapping database will take time to develop.
App Stores Aren’t the Holy Grail. App developers whose marketing strategy starts and ends with getting onto app store “shelves” need a reality check. With more than 200,000 apps on Google’s Android Market and 350,000 on the Apple store, it is hard to stand out. According to Distimo, 20 percent of free applications and 80 percent of all paid applications have been downloaded less than 100 times in the Google Android Market, worldwide. Ninety-six applications have been downloaded more than 5 million times, with Google Maps the winner, with more than 50 million downloads in the Android Market.
Traffic Targeted. Navteq will begin delivering its traffic services in Transport Protocol Expert Group (TPEG) standard format to enable location-targeted traffic services with radius search capabilities and user authentication and session management. The format allows more targeted data to be delivered in smaller file sizes.
Mobile Advertising Flying High. Many of the location content providers are counting on monetizing with mobile advertising, and things are looking good. AdMob is receiving more than 2.7 billion mobile ad requests daily, spanning more than 80,000 mobile applications and websites. Now they are introducing ads for tablet formats. Ad Mob was purchased by Google last year for $750 million.
Snippets
Nokia is ending the confusion of its dual names by killing the Ovi brand. Ovi maps, Ovi e-mail, Ovi music, Ovi store, and other Ovi products will continue to operate under the Nokia brand name.
Industry-backed Future of Privacy Forum is launching a new ApplicationPrivacy.org website to help developers create their own privacy policies. Location privacy concerns have so far been focused on the big players like Apple and Google, but app providers have a critical role.
Firefox for Android now includes a “do not track” tool that signals all web pages, images and advertisers that the user doesn’t want to be tracked.
Taipei officials are ordering Apple and Google to offer free seven-day mobile app trials in alignment with Taiwan’s Consumer Protection Act.
Google is raking in more than 97 percent of U.S. mobile search spending. Yahoo and Microsoft’s Bing share the remainder.
Monetizing with Nothing. The Inside Virtual Goods report estimates $1.6 billion dollars was spent by game players on virtual goods last year and is predicting a 40 percent increase in 2011. There is a gender factor. MocoSpace, mobile entertainment provider, reports that although the percent of male players (53 percent) is only slightly higher than female, men account for 90 percent of all virtual goods purchased in their games. Can you lend me your sword, sir?
SOFIC 2011, the Special Operations Industry Conference held in Tampa, Florida, received a lot of attention this year for several reasons. First, the apprehension and death of Osama Bin Laden by the Navy SEALs was a national attention grabber. Second, as irregular warfare becomes the norm, there is a growing need for unconventional operations. As a result, the Special Operations community is seeing their budgets increase while other military activities are seeing cuts. SOFIC was extremely well attended with over a one-hour-long line for late on-site registration. Thankfullly I pre-registered early.
The conference was what one would expect with all the major defense industry players showing off some of their latest technology. Boeing was highlighting its A160 Hummingbird Unmanned Aerial Vehicle, a helicopter that can reach high altitudes, hover for long periods of time, go great distances, and operate much more quietly than current helicopters. It features a unique optimum speed rotor technology that enables the Hummingbird to adjust the RPM of the rotor blades at different altitudes and cruise speeds. One of its proposed GIS-related missions is as an ISR platform.
Lockheed Martin was demonstrating HULC, a sci-fi looking exoskeleton that was surprisingly unobtrusive and intuitive for the user. HULC (Human Universal Load Carrier) is hydraulic powered, permitting users to carry loads of up to 200 pounds for extended periods of time over all terrains. The design permits deep squats, crawls, and upper-body lifting. HULC senses what users want to do and augments their ability, strength, and endurance. See the following video which does a better job of explaining its features and capabilities. For those of you doing field GIS data collection in remote locations it may be of interest as a way of carrying heavy gear over rough terrain. Click on the image below to view the video.
Also on display was information about the new line of dirigibles for persistent surveillance and ISR data collection such as this Northrop Grumman Long Endurance Multi Intelligence Vehicle (LEMV). These airships are a hybrid blimp and ridged aircraft that have aerodynamic lift, designed to hover at high altitudes for long periods of time, up to 21 days. They can be manned or unmanned. One would think that these large slow vehicles could be vulnerable to small arms fire but the high altitude combined with a semi-ridged tough skin and low helium pressure make them almost immune to ground attack.
GIS-related exhibitors included ESRI, BAE with the new version Socket GXP for imagery analysis and exploitation, and TerraGo showing GeoPDF creation and add on tools. Although there was no direct information about geospatial participation in the Bin Laden raid, experience teaches us that GIS played a part in mapping and reconstructing the compound using aerial and ground-level imagery with GPS guidance throughout the operation. In conversations with some attendees, we guessed that the compound was reconstructed to the last detail including construction using the same types of building materials so the teams could practice how tough penetration would be and the level of protection walls would provide. But remember, even at this SOFIC conference, those who really know won’t talk and those who talk don’t really know.
One guess I’m confident about is that they practiced every possible scenario over and over again. In my personal experience during my Navy career, I was the Weapons Officer of the USS Forrest Sherman DD-931 which was part of the Iranian hostage rescue attempt in 1980. In 1980 carriers and large combatants didn’t operate in the Persian Gulf because everyone thought the waters were too shallow and the Gulf too small for carrier ops. As a result, we were the only combatant in the Persian Gulf and our job was to act as a ”horse’s twitch” attracting the attention of the Iranians in the northern Gulf while the helicopters came in from the south. The key lesson learned from the helicopter crash and failed attempt was practice, practice, practice and plan for every contingency.
At trade shows I always like to hit the small booths because that’s where the innovation shines. Several smaller vendors had items of interest to us GIS people. One example that may be of interest to GIS field operators, especially emergency response command centers, was a very portable satellite dish antenna that is a precision inflatable ball. GATR Technologies makes the four-pound antenna that can be carried in a backpack and set up in minutes to provide 1.2-meter high-bandwidth communications. The entire equipment package is less than 50 pounds and the inflated ball was surprisingly stable, even in heavy winds, according to the GATR rep.
Another high-tech GIS based technology was a robot swarm capable of performing many hazardous tasks. The science-fiction-like swarm, built by Solstice, can operate autonomously or as directed by an operator. The individual robots use GPS and IMUs to move to target locations and report back their position and data collected in the field. The location of the bots can be displayed on a GIS along with the data attributes collected. One example of their use was rapid combat airfield inspection. Dozens or more robots are sent out to inspect a proposed landing site for potholes or FOD (debris that can pose a jet engine intake hazard). Then the bots can line up and provide approach and runway illumination.
You probably have seen toy remote control helicopters sold in specialty gift stores. The Shadow and Dark Shadow are serious versions designed for surveillance and data collection. Built by BCB of the United Kingdom, the remotely piloted four rotor helos have a 2.5 lb. payload and a 70-minute flight duration on internal battery power. They can easily carry still or video cameras.
The booth that tickled me the most was a young inventor’s new design for a lowly tent stake. When I saw it I wanted to do a Homer Simpson “D’oh, why didn’t I think of that?” Eric Simonson, shown here, inventor and president of ToughStake, solved the annoying problem of tent stakes not working well in sand.
He realized that the reason stakes pull out is that the load pulls the top of a traditional stake which pulls it over then out easily. Eric came up with a design that is genius in its simplicity. He built a flat metal shovel-like stake that has a steel cable and ring running from the bottom of the stake up to the load. Since the pressure is applied to the bottom the stake it is not pulled ove
r but actually drives deeper. At his booth, Eric had a simple test box filled with dry sand so attendees could try it for themselves. I tried it and with the force of one arm I couldn’t budge it.
His stake works equally well in normal soil, dry sand or snow. I could see this stake solving a lot of field installation problems such as setting up remote antennas towers, data collection gear, tents, and protective canopies. Well done to Eric for solving such a basic problem that has plagued many military field operations with such an elegant solution.
And of course I have to end with a big “Bravo Zulu” (Navy talk for well done) to Navy SEAL Team Six.
As touchscreens get larger in vehicles, so does the thought that location-based services should be included. At the Telematics Detroit 2011 conference, while most industry observers say that some sort of advertising will soon be in every vehicle, not everyone is sold on having advertising flashed to drivers as they go by a business.
NOVI, Mich. — While the automobile may become the ultimate mobile communication device, it remains to be seen how big a role location-based services will play in this new development, said an analyst here at the Telematics Detroit 2011 conference.
“We have been looking into LBS for 10 years. The idea of driving by a store and getting a coupon is one that [consumers are] cool to. There is a big privacy issue that may backfire on companies,” said Thilo Koslowski, Gartner vice president. “In our studies, social networking still scores low for the average car consumer. The people who are buying cars are not thinking about Twitter while driving their cars — though the numbers are higher among younger drivers. Navigation is still the top feature that consumers want.”
Because of larger screens going into many vehicles, LBS seems like a natural advertising fit, but Koslowski says it will be more along traditional display-type marketing models.
Koslowsi said the biggest competition the auto industry has is the smartphone or other consumer mobile device. “We will see growth in vehicle application on the Android platform, while Apple will be leveling off. [Research in Motion] will have a lower share.”
The risk for auto manufacturers is getting too many gadgets and applications into a car. “There is a lot of risk, and hype, when manufacturers try to get too much into a vehicle. Consumers will expect certain connectivity features in the future,” Koslowski said. “Many of these innovations will occur, for the premium brands, in 2013 — that’s just around the corner in automotive years.”
Overall, Koslowski says telematics vendors and automakers should balance their priorities and opportunities. “They should seek new partnership models and strive for controlled openness [of systems], which means not complete control. The automobile will emerge as the ultimate mobile device,” he said. “There are several challenges about the connected vehicle. It is too expensive — not a must-have for consumers. Manufacturers have an unrealistic expectation.”
One of the companies wanting to get its services into a vehicle, Verizon Wireless, showcased its “Rule the Road” initiative at the conference. Rule the Road, which leverages the 4G and LTE networks, features a suite of services such as Wi-Fi hotspots, vehicle diagnostics, navigation, and traffic and safety/security.
“What you can and can’t do [in a vehicle] are important. Most navigation systems have long wait times to reroute; in the LTE world, traffic date and rerouting are immediate,” said Janet Schijns, Verizon Wireless vice president, business solutions group, who previously worked at Intel and Motorola’s enterprise group. “The car is the most powerful mobile device.”
Schijns says the car will be a great mobile communications device because owners are more loyal to it than another consumer product. “The average person used to own a computer for five years — that time continues to be reduced. They are less loyal to their mobile devices,” she said. “But people are loyal to their cars. They are the longest-life mobile device.”
Manufacturers continue to innovate and roll out products tailored to the automotive telematics market. CSR made several announcements, and exhibited, at Telematics Detroit.
One of its products, the SiRFstarIV GPS engine (GSD4e 9500), features active jammer removal technology that precludes in-band interference in cars.
“It’s the same receiver adopted by Samsung on their Galaxy mobile phones,” said Lars Boeryd, CSR director of automotive marketing.
CSR also said that Renesas Electronics Corp. adopted its location and connectivity hardware for its automotive infotainment platform. The company also is tailoring its CSR6000 Wi-Linx to automotive manufacturers to turn cars into rolling Wi-Fi hotspots, which seemed to be a big deal during sessions here.
M2M Constitutes Large Location Market
One bright spot in the whole location market is the burgeoning machine-to-machine segment. Some of the numbers are big: 4.4 million MRM units deployed by 250,000 companies, said Clem Driscoll, CJ Driscoll & Associates founder, in his annual presentation at Telematics Detroit.
Driscoll still believes that the Contran 245 Brazil law that requires every new vehicle in that country to have a GPS-enabled system will be huge for the industry. However, he concedes that the South American country has been slow to implement this law.
Trucking fleet markets, which have been in the doldrums since a 2008-2009 slump, may be heading back toward profitability because of new government regulations that require electronic onboard monitoring recorders, or EOBRs, Driscoll said. “These simple EOBRs will be in the $300-$500 range,” he said.
Kore Wireless Group, which exhibited at Telematics Detroit, said they bought Melbourne-based Mach Communications Pty Ltd., a wireless M2M network provider. “The growth in the Asia-Pacific market is going to triple. We wanted to have a solid presence in that area,” said Pete West, Kore Telematics business development manager.
Kore, which partners with Vodaphone and Iridium, is looking at such future M2M markets as insurance and health-care diagnostic monitoring, West said.
Another M2M company, Telenor Connexion, announced that it had partnered with Italy-based Octo Telematics, which specializes in telematics services and systems for the insurance and automotive market. “The company has seen aggressive growth, particularly in emerging countries in Eastern Europe. In Europe, the market is pay-as-you-drive. It’s a progressive way for building new customer segments that did not want restrictions in Europe,” said Per Lindberg, Telenor Connexion global business development executive.
Telenor Connexion, which has a long-established relationship with Volvo Trucks and many other companies, now builds its own M2M platforms.
In other conference news:
Overused conference word alert! The word “experience,” as in “driving experience,” or “consumer experience,” is way overused. Just like the 1990s’ “value-added” and ”best-of-breed” or “solution” (instead of product). A prominent wireless exec used the word “experience” more than a dozen times in her 40-minute presentation.
Telematics Detroit 2011 had a big crowd, which was not bad in a so-so economy in a remote location.
The recent furor concerning President Obama telling Israel to withdraw to its 1967 pre-war boundaries brought back some vivid memories for me. I was there in Israel in 1967, coincidentally and thus unintentionally covering the Six-Day War for Radio Free Europe, along with several other genuinely surprised correspondents and journalists. We encountered many unusual situations and not a few difficulties, which I will relate shortly.
In his Mideast statement, the President obviously misread his GPS (Geo-Political Situation) where Israel is concerned. He, along with his appointee at the Federal Communications Commission, also misreads the needs of this nation, and here I’m talking about the real GPS — the Global Positioning System.
The two scenarios — Israel in 1967 and the United States today — are connected, and that connection has to do with GPS. I urge all my readers to take prompt action, as outlined at the end of this column. Believe me, it is in your own best interest.
Navigation in 1967
One of the difficulties my fellow journalists and I encountered in 1967 was navigating around Israel in the pre-GPS era. All we had then were paper maps, of course, and after six days everything had changed, and not in small ways, either. Plus, there were mined roads and mined pathways everywhere that were not marked accurately on any map, but were marked on the ground with white flags that approximated the area of the minefield.
Think for a moment about navigating through minefields with simple paper maps as designators, and hopefully that will get your attention and give you some idea of the daunting navigation challenges we faced in 1967.
If President Obama, the Federal Communications Commission, and LightSquared have their way, we may soon find ourselves navigating without GPS and reverting to paper maps here in the United States as well. I wonder if that is really the legacy for which the Obama administration wants to be remembered: destroying the efficacy of the greatest satellite constellation ever placed in orbit. More on the FCC and LightSquared later.
Return Visits
I have returned to Israel several times over the last 44 years on various military assignments, including one to the vastness of the Negev desert, which comprises half of Israel’s southern landmass, where there are few discernable landmarks. Navigating in the Negev can be a daunting task without GPS, because believe me when I say Israel is still a country surrounded by a host of enemies. This means that a wrong turn when you are navigating close to those borders can be disastrous, even fatal; for that reason among others, GPS units are very popular in Israel. Almost everyone I met had one or more units. Handheld units are extremely popular because you can get just as lost and in as much trouble walking around and making wrong turns as you can by driving, even in the Israeli capital of Jerusalem.
Consequently there are several Israeli companies today that produce excellent GPS units, including ruggedized military units. In fact, an Israeli company makes one of the best military SAASM GPS units for warfighters manufactured today. But that is another story, for another time. For now let’s briefly travel in time back to 1967.
There I was…
For reasons probably left better to the imagination, I found myself in Israel just as the Six-Day War drew to a rapid close. At the time I was attending University Abroad in Munich, Germany, and working as a broadcaster for Radio Free Europe. Even though I had not planned it, I was able to cover the immediate aftermath of the Six-Day War on the scene for Radio Free Europe as a foreign correspondent. Great shades of Edward R. Murrow.
It was an amazing, tension-filled, historical moment that I will never forget. As I mentioned, one of those memories involves how we managed to navigate around a country that had just won a war conducted throughout its own and neighboring territories. To say that navigation in post-war Israel in 1967 was sometimes a major issue is putting it mildly.
For example, during a memorable journey from the port of Haifa to our quarters in Jerusalem and then on to our destination of Masada, near the Dead Sea, we used several different forms of transportation. We departed the busy port city in a tour bus to Jerusalem, and then continued by desert trucks toward Masada. Halfway there, we switched to horses, then to camels, and our final transports were tiny burros supposedly able to carry us up the ramps at the lofty 2,000-year-old natural stone fortress steeped in history.
Granted, all these forms of transportation were not strictly necessary, but since we were in Israel for the experience, an unforgettable experience is what transpired — although a full-blown war and its exciting but very confusing aftermath were not exactly what we had envisioned. I might add that we were constantly accompanied by bodyguards and a security force for the entire duration of our visit, which was vaguely comforting and troubling at the same time. I will never forget our first meal at Masada when we were able to converse with our bodyguards and ask the proverbial question, “What did you do during the war, Jacob?” The answer was of course “If I told you I would have to …” Well, you know the rest. Aerial view of Masada and the remains of the camp of Roman besiegers built in 73 C.E.
Considering all the forms of modern and ancient transportation we utilized during our visit, you might ask how we managed to navigate accurately, since the GPS was of course still eleven years away even from its initial launch, let alone operability.. The answer is, we navigated as accurately as possible and we did it the old-fashioned way, using the pre-1967 version of GPS: Global Navigation & Planning (GNC) maps, ancient street maps, and at times hand-drawn maps. The GPS abbreviation in 1967 stood not for Global Positioning System but for Going Places Slowly, while stopping every fifteen minutes to consult a paper map of dubious accuracy.
Today
Today, of course, the trip from Haifa to Jerusalem and then to the storied fortress of Masada can be made on a fancy European tour bus in air-conditioned comfort, and you can take a cablecar to the top of Masada. Once there, you might be able to just barely see the Dead Sea, which is much further away now than it was in 1967. Yes, unfortunately the Dead Sea is shrinking drastically, due to the high demand for water in Israel today. It is barely visible from the top of Masada’s highest vantage point. You might find it interesting to know that all the young men and women in the Israeli armed forces today take their oaths of allegiance atop Masada. The reasons are historical and make interesting reading, check it out.
Today, of course, everyone navigates accurately to all these wonderful historic venues with a handheld or vehicle-mounted GPS. And believe me, as I said, it seems that everyone in Israel has at least one. And no one in that country today, for personal and security reasons, wants to go back to the old days of navigating with paper maps, where one wrong turn can be catastrophic.
Lessons Learned
So anytime you find yourself being the least bit complacent about GPS and what it does for you, think about what it is like to live in Israel, where GPS has revolutionized the way an entire county navigates and literally serves as a lifesaving device every single day.
Here is the United States, we tend to take our technology for granted — no surprise there — but when you find yourself in some place like Israel, Iraq, or Afghanistan, and your life
literally depends on a satellite system 12,500+ miles up in space, believe me, you no longer take it for granted.
An Enabler
Always remember: GPS is a ubiquitous utility that is provided to the world free of charge, as a gift from the United States government. Countries around the globe, including Israel, use the positioning, navigation, and timing (PNT) capabilities enabled by GPS for critical national infrastructure, for military planning and execution, and yes, for everyday navigation. Plus, as I have stated many times, more than 90 percent of the 1 billion-plus people around the world who use GPS, use it for time and all the capabilities that time accurate to 1×10-E14 enables.
Will It Be There?
Please never take your GPS for granted. Part of not taking it for granted is ensuring that GPS is available and is protected from encroachment and jamming by companies like LightSquared. If LightSquared has its way, and its FCC terrestrial license is not revoked, then the company will be able to legally jam GPS and deny everyone in the United States from enjoying the innumerable activities that GPS enables around the globe.
Does that make sense? The U.S. government provides the GPS service globally, but we in the United States cannot benefit from it because a private company has convinced the FCC that being able to Google or Twitter on a cell phone in the middle of Kansas is more important than all the industries and capabilities that GPS enables, not to mention the $100 Billion in revenue that the GPS industry generates every year?
I ask again — does that make sense?
Bottom Line
Let’s hope we never have to fight another war on our homeland, because if we do and LightSquared and the FCC have their way, we will do it without GPS. We will find ourselves navigating by the seat of our pants, just as I did in Israel in 1967. Call your Congressman and complain loudly about LightSquared and the FCC. Help put an end to this insanity.
Until next time, Happy Navigating.
P.S. Our 1967 group of war correspondents included the grandson of former British Prime Minister Sir Winston Churchill, who was named after his famous grandfather. Young Winston wrote an excellent book about the war shortly afterwards. If you want to know more about the Six Day War from an eyewitness then I highly recommend The Six Day War by Randolph S. Churchill and Winston S. Churchill. As I was there, I can verify that Winston’s book is forthright and factual. Winston tells it like it was with no dithering of the facts for political correctness.
By Ahmed M. Kamel, Daniele Borio, John Nielsen, and Gérard Lachapelle, University of Calgary
A fuzzy tracking system performs as a narrow bandwidth tracking system in terms of noise reduction, and a wide bandwidth tracking system in terms of dynamic response, overcoming the contradiction between receiver bandwidth requirements using classical tracking techniques for either noise reduction or dynamic tracking.
Autonomous navigation systems onboard precision guided missiles or fighter planes depend on GNSS and its very weak signals for positioning and navigation. Performance of a GPS receiver usually depends on the phase-lock loops (PLLs) used to down-convert these weak signals and track their carrier phase and frequency. A PLL can properly work only if its bandwidth is wide enough to track the signal dynamics, which can be significantly high, given the extremely rapid movements, accelerations, and direction changes of a missile or plane. On the other hand, wide-loop bandwidths allow larger portions of noise and interference to enter the tracking loops and disturb the signal tracking process. Excessive noise and interference can lead to loss of lock.
Aiding from a frequency lock loop (FLL) allows reducing the PLL bandwidth. This cannot prevent, however, frequent loss of lock and can be strongly affected by interference. The tradeoff between bandwidth requirements motivates design of alternative tracking systems replacing conventional FLL-assisted-PLLs.
We used fuzzy systems to design and test an innovative FLL-assisted-PLL. The output of a fuzzy controller that replaced standard loop filters drives the numerically controlled oscillator (NCO). The proposed fuzzy frequency phase lock loop (FFPLL) uses both frequency and phase discriminator outputs to generate the required frequency changes to tune the NCO, which in turn generates the local carrier for signal down-conversion.
The main core of any fuzzy system is its fuzzy sets or membership functions (MFs) that map input/output parameters into defined linguistic variables describing the input/output states. Loop discriminator outputs mainly depend on the incoming signal carrier-to-noise power density ratio (C/N0) and have a probability density function (PDF) that, under lock conditions, can be accurately approximated by a Gaussian distribution. Although the mean of this Gaussian distribution is zero under normal tracking conditions, it can be affected by sudden changes in the presence of dynamics that can cause cycle slips and other phase errors. The standard deviation of this distribution is also dependent on the signal quality and hence on the interference level. For these reasons, the discriminator output values have been clustered into several overlapped Gaussian MFs that can linguistically describe their state. The variance of the Gaussian MFs assigned to the phase and frequency discriminator outputs are adaptively tuned according to the incoming signal quality. So any change in the interference power level leads to variations in the Gaussian MF variance to ensure accurate linguistic description of the discriminator output signal. The fuzzy rules are selected to tune the NCO and ensure accurate and robust signal tracking.
We assess performance of the fuzzy tracking system in the presence of different power levels of interference. To generate GPS signals corrupted by radio frequency (RF) interference, we used a hardware GPS signal simulator combined with two external signal generators, and applied different interference levels combined with missile harsh dynamics to test the proposed system. Results show that the fuzzy tracking system significantly improves system robustness and accuracy such that it is able to track very high dynamics with reduced tracking jitter. The system shows resilience against strong interference up to a certain extent where increasing jamming levels are compensated by the online adaptation of the MF distribution on the basis of a small amount of data or C/N0 information.
The system performs favorably against standard tracking loops that cannot sustain the same level of dynamics and interference. The adaptive FFPLL can sustain interference power levels up to J/S = 40 dB. Even when the algorithm loses lock, a fast, reliable reacquisition is obtained when the interference power is reduced.
Theoretical Basis
Most physical processes are nonlinear in nature. Linear approximations and models are employed because linear systems are simple, understandable, and can provide acceptable approx-imations of the actual processes. Unfortunately, most tracking problems are too complex, and their linear approximation does not provide sufficient insight on the system in all environmental conditions.
Standard tracking loop filters are obtained by solving an optimization problem where the noise characteristics and the order of the signal dynamics are known. Different loop orders are obtained for different orders of dynamics. Moreover, the optimization problem is usually solved by considering a linear approximation of the loop. These assumptions are strong, but the standard solution can fail to provide satisfactory performance when the loop is no longer working in its linearity region, or the noise characteristics are not completely known. In such conditions, an approach based on a linguistic description of the system variables may be preferable. In that sense, fuzzy control systems provide sufficient tools for designing a robust alternative to standard loop filter.
In previous cases where researchers tried to use fuzzy techniques for PLL design, they used fuzzy logic controllers (FLCs) in parallel with a classic PLL architecture. We take a different approach, designing a new fuzzy rule-based tracking system to replace the standard FLL-assisted-PLL. The new system uses the noisy phase and frequency discriminator outputs and directly produces a control signal that represents the frequency change required by the NCO to maintain phase lock.
New Signal-Tracking Approach
GPS L1 signals consist of carrier, spreading code, and navigation data. To successfully demodulate the navigation data from the received signal, an exact carrier wave replica must be generated, generally using PLLs and FLLs. Figure 1 shows the basic block diagram of a standard PLL. The two first multiplication stages are required to wipe off the input signal carrier and pseudorandom noise (PRN) code required for any CDMA communication system. A local replica of the PRN code is provided by the delay lock loop (DLL) and is used to remove the PRN sequence from the incoming signal. The carrier loop discriminator is used to estimate the phase error between local and incoming carrier. The discriminator output, which represents the phase error, is then filtered and used to tune the NCO, which adjusts the frequency of the local carrier wave. Thus, the local carrier wave tends to be a precise replica of the input signal carrier.
FIGURE 1. Basic PLL block diagram (courtesy of Kai Borre).
PLL design is a challenging task, particularly if the receiver is affected by high dynamics, or if the input signal power is low due to signal interference or degraded environments. It is therefore desirable to provide robust algorithms for the PLL design.
FLLs are more resilient against signal dynamics and produce accurate velocity measurements. PLLs however also provide signal-phase information, leading to a simplified data demod-ulation process as compared to FLLs. Several attempts to combine the benefits of both loops have been done in the past, leading to various FLL-assisted-PLL schemes where the joint use of the two loops becomes an effective way to accomodate high signal dynamics. The ability of a tracking loop to track signal dynamics is also determined by the loop order. For high dynamic
scenarios, a 3rd order PLL is usually used as it is only sensitive to acceleration jerks. Higher-order PLLs can produce system instability and greater noise level. Figure 2 shows the loop filter of a typical 2nd order FLL-assisted 3rd order PLL, where T is the update period of the loop. All the gains shown in the figure are design parameters and function of loop bandwidths, Bnp and Bnf , as reported in Table 1.
Figure 2. Schematic of a loop filter of a 2nd order FLL-assisted 3rd order PLL (courtesy of Elliot Kaplan).Table 1. FLL-assisted-PLL loop filter gains.
The response of a GPS receiver to different signal-to-noise levels depends mainly on the code and carrier (phase/ frequency) tracking loop bandwidths. However, there is a trade-off between noise resistance and response to dynamics. Narrow bandwidth track-ing loops are more resistant to noise, which makes them suitable for moderate jamming environments. Wide bandwidth tracking loops are more responsive to dynamics. Thus, tracking loop bandwidth requirements for GPS receivers are conflicting. One solution is to adapt the tracking loop bandwidth to the receiver measured carrier-power-to-noise density ratio (C/N0) and receiver dynamics. However, this approach can hardly solve for both concerns at the same time; trade-off must be found.
Automatic control methods based on artificial intelligence approaches (for example, fuzzy systems, neural networks, and genetic algorithms) have emerged as an alternative model to analytic control theory. One of the greatest advantages of fuzzy controllers is the simple and intuitive design. On the other hand, this simplicity is perhaps the primary cause of their initial slow acceptance among the control community.
Figure 3 shows the structure of the system design, where the standard loop filter is replaced by the proposed FFPLL controller. The fuzzy controller is composed of three consecutive layers named as fuzzification, fuzzy associative memories (FAMs, or fuzzy rules or fuzzy associations), and defuzzification layers.
Figure 3. Schematic diagram of a fuzzy tracking loop design.
The fuzzification layer is composed of a number of fuzzy sets characterized by MFs determined by the designer. These MFs are responsible for converting the crisp input values into linguistic values. The defuzzification layer is related to the fuzzification layer through the FAM rules that compose the second layer. FAM rules operate in parallel and to different degrees. Each is a set-level implication and represents ambiguous expert knowledge or learned input-output transformations. The system nonlinearly transforms exact or fuzzy state inputs to a fuzzy set output. This output is defuzzified with a centroid operation to generate an exact numerical output.
System Design
The fuzzy frequency/phase tracking system is designed to rapidly recover the signal frequency in the presence of large frequency errors, that is, after acquisition/reacquisition, and to behave as a PLL, with precise phase recovery, in the case of small frequency errors. The fuzziness of the system inputs is mainly due to the low power of GPS signals with respect to thermal noise, the main source of phase/frequency jitter. Noise distribution then plays a major role in the system design. This is why an a priori knowledge of expected signal parameters such as C/N0 is essential. This knowledge can be achieved during signal acquisition or in the first stages of signal tracking. For example; a signal with a C/N0 equals to 39 dB-Hz, in static condition and in an interference-free environment, is characterized by a phase discriminator output with a distribution approximately Gaussian as shown in Figure 4. The standard deviation of this signal, when using a standard PLL, can be theoretically calculated as follows:
where (rad) is the standard deviation the dot-product discriminator, which also suits well the arctangent discriminator used in this research, T (s) is the predetection integration time and c / n0 carrier to noise power expressed as a ratio (Hz).
Figure 4 shows the time-domain representation for the phase-discriminator output during tracking the incoming signal received from PRN 5 using a 4 Hz 3rd-order PLL in 1-millisecond coherent integration time and its histogram with the Gaussian function approximation. The corresponding Gaussian probability density function (PDF) in this case covers the signal expected values in standard tracking conditions at certain C/N0 levels, and it can be linguistically described as zero-state if compared to the ideal phase discriminator output. The mean and standard deviation, which are the two main parameters that govern the Gaussian distribution function, are directly related to the signal dynamics and signal quality respectively.
FIGURE 4(a). Time domain representation of a PLL phase discriminator output, (b) Histogram and Gaussian approximation, (c) An example of mapping between PDF and MF.
Receiver dynamics can cause phase tracking errors, and hence the distribution mean will be shifted from zero. On the other hand, the changes in signal quality will produce changes in the standard deviation as illustrated in Equation (1). An appropriate mapping between the signal PDF and fuzzy MFs can be made, and in this case, the probability of occurrence described by the PDF will be replaced by a degree of occurrence sensed by a number of overlapped Gaussian MFs as shown in Figure 4(c).
Using this approach, both phase and frequency-error inputs in addition to the NCO tuning-frequency output domains are clustered into several overlapping Gaussian fuzzy sets, each of them describing a certain linguistic definition of input or output value (big, medium, small, zero, and so on). The number of MFs adopted for the fuzzy controller is reported in Table 2.
Table 2. Distribution of fuzzy membership functions.
The number of fuzzy sets associated with each fuzzy variable is a design parameter selected according to the required tracking accuracy. How much these contiguous sets should overlap is also a design issue depending on the problem at hand; too much overlap blurs the distinction between the fuzzy set values, whereas too little overlap can produce excessive overshoot and undershoot.
The fuzzy rules that relate all the linguistic variables can be expressed as:
Ri : if x1 is Ai1 and x2 is Ai2,
then y is Bi. i = 1, 2 . . . 81
where x1, x2, and y are linguistic variables, and Ai1, Ai2 and Bi are linguistic labels (or fuzzy sets) characterized by an MF. A defuzzification process is used to determine a crisp value according to the fuzzy output from the inference mechanism. The fuzzy centroid method, which calculates the center of the area of the infer
ence mechanism output possibility distribution, is used as defuzzification strategy in the FFPLL. The output y is obtained as
(2)
where n is the number of fuzzy output sets, yi is the numerical value of the ith output membership function, and u(yi) represents its membership value at the ith quantization level. Table 3 shows the fuzzy rule table providing the human knowledge base of the controller.
Table 3. Fuzzy rules. The terms are B: big, MB: medium big, M: medium, S: small, and Ze: zero.
Gaussian MFs ended by trapezoidal rules were chosen as shown in Figure 5, Figure 6, and Figure 7, respectively. The variance of each Gaussian function can be changed according to signal noise level as described earlier, and online adaptation can be performed as described in a later paragraph. The FAMs are designed to act like an FLL for fast frequency tracking recovery in case of large frequency error indicated by the frequency discriminator. That can be seen in Table 3 in all the rules except when the frequency error is in the zero region. In this case it starts to look for the phase error, which is indicated by the phase discriminator for accurate phase tracking, and to extract the required data message.
Figure 5. Phase membership functions.Figure 6. Frequency membership functions.Figure 7. NCO tuning frequency membership functions.
Interference Effects
As shown in Equation (1), higher C/N0 values ensure a small noise standard deviation, hence accurate and stable tracking. Increasing signal interference level will decrease the C/N0 level.
Interference signal power usually changes according to the receiver maneuver by approaching or moving away from a jammer, jammer motion, or to the jammer power changes. These changes affect the effective C/N0 on the receiver side. The analogy between Gaussian noise distribution and fuzzy MFs as shown in Figure 4 still holds, but a continuous change of the MF parameters — particularly the standard deviation — is required to cope with the C/N0 variations.
For online adaptation of the MFs, the noise standard deviation associated with the phase and frequency discriminator outputs must be continuously estimated. This can be done using past samples from the phase and frequency discriminators. Small analysis windows, used for collecting past phase and frequency discriminator samples, should be used to properly follow rapid changes due to the interfering signal. A tradeoff between sensitivity and accuracy must be taken into consideration. For this research, we found a small analysis window with a width of 1 second to be enough for good sensitivity at high dynamics. Figure 8 shows the modified FFPLL system with the standard deviation estimation. This information is used for the online adaptation of the Gaussian fuzzy MFs.
Figure 8. Modified FFPLL with estimation of phase and frequency discriminator output standard deviation for MF online adaptation.
Test and Simulation
The primary equipment used for testing the proposed algorithm is a hardware simulator. The hardware configuration is capable of producing GPS signals in the L1, L2 and L5 frequencies in addition to adjustable additive interference through two separate signal generators. Several custom scenarios representing typical missile motion in space have been designed and tested. The radio frequency (RF) signals are collected through a front end after passing through an external low noise amplifier (LNA) using sampling frequency of 10 MHz, and saved for post-processing.
To assess performance of the tracking algorithm under interference and dynamic effects, we designed two categories of simulation scenarios. The first category is designed to test interference effects where a static receiver with gradually increasing interference level has been used. Both the interference and high dynamic effects are examined in the second category, in which scenarios of a missile that maneuvers near an interference source are designed. Four different tracking schemes are used for GPS signal tracking. They include the usage of a standard PLL with narrow and wide bandwidths (4 Hz and 14 Hz, respectively), FLL-assisted-PLL using narrow bandwidths (3/4 Hz), and finally the new FFPLL. The performance of each algorithm is evaluated by assessing the continuity of tracking during high dynamics, that is, the ability of the receiver to maintain lock, and the noise standard deviation of the estimated Doppler.
Interference Effect on Accuracy
The first test category involves studying the interference effect on GPS signal tracking capability and accuracy, using a custom scenario of a static GPS receiver with gradually increasing interference level. A continuous wave (CW) interference signal centered at the L1 frequency is combined with the generated GPS L1 signal and collected by the front end for post processing. Figure 9 shows the increasing interference effect on the signal quality particularly the signal C/N0. In this scenario, the jamming to signal (J/S) interference power is gradually increased every 10 seconds in steps of 10 dB each starting from 0 dB higher than the GPS L1 power.
Figure 9. PRN 23 C/N0 level changes due to increasing interference power.
After reaching an interference power of about 40 dB higher than the GPS power, none of the tracking algorithms was able to track the signal and hence 40 dB is considered the maximum jamming tracking threshold. Figure 10 shows the estimated Doppler standard deviation for PRN 23 using the four tracking schemes described earlier at different interference levels. It is clear that the FFPLL scheme is superior to the other three conventional tracking schemes in terms of Doppler tracking jitter and hence tracking accuracy. The changes in C/N0 level due to the increasing interference level affect the discriminators output noise level as described in equation (1). These effects can be noticed clearly in Figure 10. On the contrary, these changes are almost absorbed by the adaptive FFPLL, and hence the C/N0 changes have a minimum effect on the Doppler tracking accuracy.
Figure 10. Doppler standard deviation calculated for PRN 23 using four tracking configurations.
Interference and High Dynamics
The second test category assesses the system performance under CW interference and high dynamics. The scenario considered here comprises the effect of missile maneuver near an interference source. Due to this maneuver, the GPS signal C/N0 is changed with the distance from the interference source. The missile velocity in this scenario is increased to reach 300 meters/second performing hard maneuvers with acceleration up to 8 g and jerks up to 50 g/second. The same scenario is repeated five times with different CW interference powers. Due to missile high dynamics narrow bandwidth PLL or FLL/PLL was not able to p
rovide continuous signal tracking and losing lock occurred, that is why only a 14 Hz bandwidth PLL and FFPLL are considered. Interference powers generated are 20, 30, 40, 45, 50 dB respectively above normal GPS signal power. Figure 11 shows the 3D plot of missile trajectory and its maneuver near the jammer, while Figure 12 shows the effect of this maneuver on the signal C/N0 for PRN 3 when a 40 dB interference signal is applied. C/N0 increases and decreases according to the separation from the interference source.
Figure 11. 3D plot of the missile maneuver near an interference source.Figure 12. C/N0 evaluated as a function of time for PRN 3 during maneuver around an interference source.
Tracking results show the ability of continuous tracking under interference level up to 40 dB higher than the GPS signal for both PLL 14 Hz and FFPLL. Higher levels of interference lead to tracking loss. FFPLL is able to recover tracking mode and retrieve the signal phase when interference source is disabled due to missile maneuver away from the jamming source whereas the wideband PLL is not able to retrieve back the signal phase in these high dynamics conditions.
Figure 13 shows the effect of adding a 40-dB interference signal on PRN 3 estimated Doppler and Doppler standard deviation respectively, using PLL 14 Hz and FFPLL. Tracking continuity is achieved using both algorithms; the interference signal greatly affects PLL tracking accuracy whereas FFPLL tracking accuracy is much better in both interference and interference free conditions.
Figure 13. Estimated Doppler calculated for PRN 3 using PLL 14 Hz and FFPLL at J/S = 40 dB.
Conclusions
The fuzzy tracking system solves the contradiction between receiver bandwidth requirements using classical tracking techniques for either noise reduction or dynamics tracking. It shows better performance in both cases since it performs as a narrow bandwidth tracking system in terms of noise reduction, and a wide bandwidth tracking system in terms of dynamic response.
The fuzzy tracking algorithm FFPLL provided tracking robustness in very high dynamics and signal interference up to 40 dB higher than GPS L1 power. The noise level calculated from the estimated Doppler is small, equivalent to results obtained with a very narrow PLL bandwidth under normal conditions. During high dynamics, tracking continuity is achieved using FFPLL with dynamic performance comparable to a wideband PLL or FLL/PLL. Signal tracking recovery is achieved if the interference power causing signal tracking denial is reduced or turned off.
Manufacturers
Spirent GSS7700 simulator, National Instruments PXI 5661 front-end.
Ahmed M. Kamel is a Ph.D. candidate in the Position, Location and Navigation (PLAN) Group at the University of Calgary. He holds an M.Sc. in electrical engineering from Military Technical College (MTC), Cairo, Egypt.
Daniele Borio received a Ph.D. in electrical engineering from Politecnico di Torino, Italy, was a senior research associate in PLAN Group, and is a post-doctoral fellow at the Joint Research Centre of the European Commission.
John Nielsen is an associate professor at the University of Calgary.
Gérard Lachapelle is professor of geomatics engineering at U. of Calgary, Canada Research Chair in wireless location, and head of the PLAN Group.
Ed. note: I originally published this article in 2010. I occasionally re-run it as it generally receives interesting reader response.
Get It Surveyed (GIS) always brings out a small roar of laughter at the local RPLS chapter meeting. Hardee, har, har. The irony is that if you laugh at that joke, then you might as well wear a sign on your head that says “GIS Dummy.” GIS isn’t about accuracy. I’ve said it many times and I’m sure I’ll say it many more times. The fact is that the average land surveyor is only exposed to a small sliver of how GIS’s are used, namely parcel databases.
Do you think when McDonald’s is planning (not building) a new restaurant that they care if the parcel accuracy is +/- a tenth? Of course not, accuracy of tens of feet (or even hundreds of feet) suffices in the strategic planning phase. What they care about is a demographic analysis of the area, local competition, traffic behavior, etc. The power of GIS is that it can handle this sort of data and answer questions such as “show me all of the 3+ acre commercial parcels for sale within 500 ft. of Main St. and within 2000 ft. of the nearest Burger King.” Read this article that describes how a company is using GIS to find new restaurant sites. Do you think they care about pinpoint accuracy?
Another GIS app that’s gaining momentum with the general public are predator GIS databases. You can check out Family Watchdog. Plug in your street address and have it perform a search. Do you think positional accuracy is important to users of this service? Having a correct address and other descriptive information is more important than +/- 10 feet positional accuracy.There are many thousands of GIS uses like the above that don’t require pinpoint accuracy. Would it be nice to have pinpoint accuracy in all GIS services? Of course, but financially speaking, it’s not realistic.
The purpose of writing the above is to paint a picture of the scope of GIS. It’s much, much larger than what the average land surveyor is exposed to. It’s not just the part-time GIS technician at the local government office whose life goal seems to be making things difficult for you.
As much as it may offend you (the typical land surveyor) to hear it, you can’t handle GIS. You can equate it to using Microsoft Word or Excel, you might use it daily and use some of its capabilities, but you really only use about 10 percent of what it’s capable of. So, the thought that a GIS professional should be “under the supervision” of an RPLS, from a broad perspective, is ridiculous. I know many RPLS’s and in trying to imagine some of them being in responsible charge of a GIS is an absolutely frightening thought.
Ok, I’m not here to go on an RPLS-bashing tirade. In fact, the properly educated RPLS is vitally important to a GIS. Last Fall, I wrote a column emphasizing the importance of the RPLS and GISP collaborating together. I just want to put it in perspective because I hear from and read about land surveyors who complain about a GIS and about the incompetence of those running it, how land surveyors should be in responsible charge, etc. The fact is that most RPLS aren’t qualified.
On the flip side, I’ve heard of a fair share of part-time (and full-time) GIS technicians who don’t understand the local statutes and who have no problem saying, with the utmost confidence, that “your survey is wrong.” These are the folks who “manage” the parcel database that the RPLS are used to dealing with. Not that this is always the case; in fact, there are many competent GISP, but those are primarily in the densely populated, metropolitan areas where there is a healthy tax base to support a full-time GIS team. Unfortunately, much of the U.S. is comprised of low-density (thus, low tax base) rural areas.
A discussion has been around for many years that promotes the idea of a nationwide parcel database so that the disparity between the quality of the Los Angeles County and Modoc County parcel GIS data is not so large. There’s even a book on the subject called “National Land Parcel Data: A Vision for the Future.” From its description, the book summarizes that “nationally integrated land parcel data is necessary, feasible and affordable.” However, the author goes on to admit that little progress has been made since 1980 when a National Research Council book called for such a national system. Why is that?
Brent Jones (RPLS, PE) is the surveying/engineering/land administration industry manager at ESRI. He recently established a blog discussion on the website Spatialroundtable titled “National Parcel Land Data and Surveyors” and references the aforementioned book. There have been several comments on the blog from reputable industry people. It’s well worth reading the comments.
I contend that, counter to the book’s conclusions, a national parcel database is not affordable…and I’m not talking about funding (necessarily), but culturally unaffordable. Case in point:
Pat the RPLS files a plat with the county. Chris, the county GIS technician, reviews the plat and informs Pat that the boundary doesn’t match the county GIS so it will not be accepted as is. Of course, Pat blows a gasket, then re-checks the plat and verifies it’s correct. Pat then proceeds to educate Chris on the regional statute, thus establishing Pat’s authority. Chris bows and accepts the plat. Pat is fuming on the way back to the office because he doesn’t know who to charge the two hours of time spent educating Chris.
Why does the story end here? I contend that land surveyors have boxed themselves into being short-term minded, extremely short-term minded….not quarterly, like corporate America, but even worse…hourly. How many times have you heard “I billed 110 percent of my hours this week?” spoken like they’ve earned a Bronze Star. Yes, it’s impressive to the boss and he/she may get a nice bonus at the end of the year, but it’s a very short-term attitude and part of the reason that land surveyors are trying to grab the wagging tail of the big GIS dog instead of walking shoulder-to-shoulder down the sidewalk.
I’ve had several RPLS say to me “I’ve been actively looking for GIS work.” Translated: “I’m looking for someone to pay me to provide GIS services that I need to learn.” It’s not that easy. You didn’t get paid to go to school. The same is true here. The RPLS has to invest time into GIS. I’m not talking about just an online GIS course. It needs to be good ol’ OJT (on the job training). If I were Pat, I’d foster the relationship with Chris and have Chris show me how the GIS works, what the procedures are, how the GIS data was created, how the GIS data is updated, what the plan is for updating, what Chris’s departments hot buttons are, how Chris’s budget is funded, etc. I’d even go the point of volunteering to enter some data to get a real feel for how the GIS works. This type of OJT is orders of magnitude more effective than reading a book or taking a class. During this OJT, Pat might also find out that he is weak in some areas important to GIS such as geodesy or database structure and needs to gear up in those areas.
Hmmm… Just think if every RPLS association chapter reached out to its local city or county GIS department and started a collaborative effort to teach each other about the challenges that each faces in their jobs, both as RPLS and GISP. They would educate each other, understand each other better, and ultimately serve each other’s needs more effectively. Too simple-minded? I don’t think so. Which relationship do you think would be more effective when discussing collaborating on a National Parcel Database — meeting the local GIS department manager for the first time or meeting with Chris, with whom you’ve worked on a number of small, local GIS projects and already have a solid understanding of the GIS department needs, processes, strengths, and limitations?
Thanks, and see you next week.