The U.S. Court of Federal Claims has allowed Ligado Networks to proceed with its $39 billion lawsuit against the federal government, marking a significant development in a long-standing dispute over 5G spectrum usage and property rights.
Judge Edward Damich partially favored Ligado by acknowledging the company’s case for property interest in the spectrum allegedly used by the Department of Defense (DOD) while rejecting its claim that the FCC license constituted a property right subject to federal taking.
The controversy stems from the FCC’s 2020 decision granting Ligado exclusive authority over spectrum near GPS frequencies, raising concerns about potential interference with GPS systems. Ligado’s October 2023 lawsuit accuses the U.S. government of conducting a “multiyear misinformation and disparagement campaign” to conceal its activities and misappropriate Ligado’s licensed spectrum for DOD systems without permission or compensation.
The government attempted to dismiss the lawsuit in January 2024, arguing lack of jurisdiction and that Ligado couldn’t establish a cognizable property interest in its FCC license. However, Judge Damich’s ruling allows the case to proceed.
At the core of this dispute is the proximity of Ligado’s L-band spectrum to GPS frequencies, raising concerns about potential interference with critical GPS signals used for navigation, timing and various applications essential for national security and economic stability. The DOD, GPS companies and industry officials have strongly opposed Ligado’s plans for a terrestrial 5G network, arguing it could cause harmful interference to GPS receivers.
AEVEX Aerospace has acquired Veth Research Associates (VRA), a veteran-owned firm specializing in navigation and autonomous systems. The partnership aims to enhance AEVEX’s capabilities in delivering solutions for unmanned systems operating in jammed and contested environments, which is essential for addressing the challenges anticipated in future conflict scenarios.
Established in 2013, VRA brings to AEVEX its intellectual property portfolio centered around a sensor fusion engine, which powers real-time autonomous decision-making using deep neural networks and machine learning. Integrating VRA’s expertise seeks to improve AEVEX’s ability to deliver autonomous hardware and software solutions, particularly combat-proven Group-II and Group III tactical UAS operating in GPS-denied or spoofed environments.
VRA’s LYNX vision-based navigation (VBN) system enables navigation independent of GPS. It features day/night capability, a modular design and open architecture, making it adaptable for use on both manned and unmanned platforms. It is currently deployed with multiple Department of Defense (DOD) and international users.
Brian Raduenz, CEO of AEVEX Aerospace, emphasized the strategic importance of this acquisition, stating, “With the addition of VRA’s leadership team and subject matter experts, we are well-positioned to lead the future of autonomous decision-making in contested environments. Their innovative sensor fusion engine will serve as the backbone of our navigation solutions as we advance into the next generation of GPS-denied capabilities.”
Skykraft, an Australian space technology company, has signed a participating project partner agreement to advance positioning, navigation and timing (PNT) systems in low-Earth orbit (LEO). This agreement, backed by an International Space Investment (ISI) India Projects grant from the Australian Government, marks a significant milestone in fostering space cooperation between Australia and India.
The project’s primary objective is to develop and demonstrate collaborative PNT systems. This includes establishing the viability of large-scale LEO constellations, addressing vulnerabilities in existing GNSS in denied environments, and exploring novel applications for PNT signals from LEO. Additionally, the project aims to create a comprehensive roadmap for collaborative LEO-PNT by implementing resilient, easily updatable constellations.
The project also seeks to enhance environmental monitoring capabilities through GNSS-reflectometry (GNSS-R) and radio occultation (GNSS-RO) technologies. This will improve understanding of Earth’s oceans, droughts, and floods while enhancing real-time space and terrestrial weather forecasting. It will explore emerging applications, such as tsunami monitoring and warning systems.
The automotive navigation of tomorrow is highly connected and capable of dynamically using high-resolution map information and vehicle and environmental data from the cloud. It is an enabler for powerful driver assistance, intelligent e-mobility and autonomous driving. As a global provider of software engineering services for the mobility industry, Intellias is involved in many of these developments.
Although obtaining mapping and navigation data is easier today than it was 10 years ago — thanks to dashcams, UAVs and satellites — collecting this data is still labor-intensive. Even if most corners of the world are already recorded in public and private geographic information systems (GIS), the maps still need to be maintained regularly. Data accuracy and timeliness are the two biggest challenges in the mobility industry, followed by coverage, as the physical world is constantly evolving. To meet these requirements, the evolution of navigation and digital mapping is gathering pace. The following six technology and deployment trends will drive automotive mapping and navigation in the coming years.
1. Enriching Mapping Data With AI
Satellite imagery was a breakthrough for map creation. The wrinkle, however, is that most mapping software cannot work directly with satellite photos. Visual data first needs to be codified into comprehensive navigation datasets in a suitable format such as the Navigation Data Standard (NDS). Then map owners must keep it up to date. Both processes are costly and labor-intensive, making them great use cases for artificial intelligence (AI) in mapping.
AI algorithms improve the speed and precision of digital map building by offering the ability to update maps more regularly and map new areas faster. They can classify objects in satellite images — buildings, roads, vegetation — to create enriched 2D digital maps as well as multi-layer 3D map models. With precise maps, you can delight users with better ETAs, detailed fuel or energy usage estimates, and richer point-of-interest information.
Apart from facilitating the collection of mapping data, AI can also help with generating such data. Researchers from MIT and the Qatar Computing Research Institute (QCRI) recently released RoadTagger. This neural network can automatically predict the road type (residential or highway) and number of lanes even with visual obstructions present, such as a tree or building. The model was tested on occluded roads from digital maps of 20 U.S. cities. It correctly predicted the number of lanes with 77% accuracy and predicted road types with 93% accuracy.
That said, sensor data collection from connected vehicles isn’t going anywhere. OEMs are increasingly relying on their fleets to collect new insights for digital map creation, and this process is becoming easier with advances in machine learning. HERE Technologies recently presented UniMap — a new AI-driven technology for faster sensor data processing and map creation. The new solution can effectively extract map features in 2D and 3D formats, then combine them with earlier map versions. This unified map content data model allows new digital maps to be available in 24 hours.
Photo: Intellias
2. NDS.Live: From offline databases to distributed map data systems
Conventional onboard navigation systems are designed, developed and integrated with proprietary databases, which become obsolete with every new product generation. NDS.Live is the new global standard for map data in the automotive ecosystem, promoting the transition from offline to hybrid/online navigation. It minimizes the complexities of supporting different data models, storage formats, interfaces and protocols with one flexible specification. NDS.Live is not a database, but a distributed map data system.
NDS.Live was co-developed by global OEMs and tech leaders, including Intellias, Daimler, HERE, Denso, Renault and TomTom are among those who have already adopted it. For example, second-generation Mercedes-Benz User Experience (MBUX) systems are powered by NDS.Live. The distributed map data system provides fresh information for the driver assistance system, which gets visualized as augmented reality (AR) instructions on the head-up display (HUD). NDS.Live can help massively improve the navigation experience for EVs and regular connected vehicles. It also helps OEMs deploy value-added subscriptions for assisted driving and navigation.
3. 3D and HD map generation
3D maps enable accurate rendering of physical objects in a three-dimensional form. High-definition (HD) maps feature detailed information about road features (lane placements, road boundaries) and terrain type (severity of curves, gradient of the road surface). Both types of maps are essential for launching advanced ADAS features and, ultimately, ushering in the era of autonomous driving.
3D maps define how the vehicle moves and help it interpret the data it receives from onboard sensors. Since most sensors have a limited range, HD maps assist by providing the navigation system with extra information on road features, terrain and other traffic-relevant objects.
The bottleneck of both HD and 3D mapping is collecting and rendering data. In the case of 3D maps, you need to capture video in real time from multiple cameras, plan for interference due to vibration, temperature and hardware issues, and then repeat the process across billions of kilometers of roads across the globe. Rather than doing this huge task alone, mobility players and OEMs join forces:
• HERE and Mobileye, for example, partnered to crowdsource HD mapping data collection, with VW joining later. Mobileye developed a compact, high-performance computer vision system-on-chip called EyeQ. Installed by more than 50 OEMs across 300 vehicle models, the system supplies Mobileye with ample visual data they can then render into maps with the help of partners.
• TomTom, in turn, teamed up with Qualcomm Technologies to crowdsource HD mapping insights from its users. Qualcomm provides the underlying cloud-based platform for making and maintaining HD maps from various sources, including swarms of connected vehicles.
Photo: Intellias
4. Autonomous driving simulations
Autonomous vehicles require extensive road and track tests to pass security checks. Manufacturers also need to simulate near-crash events without putting anyone in danger. Hyper-realistic virtual worlds can be much safer testbeds for autonomous vehicles (AVs) — especially as virtualization technology improves.
A group of researchers released an open-source, data-driven simulation engine for building photorealistic environments for AV training. The engine can simulate complex sensor types including 2D RGB cameras and 3D lidar, as well as generate dynamic scenarios with several vehicles present. With the new engine, users can simulate complex driving tasks such as overtaking and following.
Waymo takes a similar approach of using real-world data collected from vehicle cameras and sensors to create highly detailed virtual testbeds. The Waymo team has built virtual replicas of several intersections complete with identical dimensions, lanes, curbs and traffic lights. During simulations, Waymo algorithms can be trained to perform the most challenging interactions thousands of times, using the same or different driving conditions and different vehicles from its fleet.
To perfect the performance of the algorithm, the team uses a fuzzing technique. During training sessions, engineers alternate the speed of other vehicles, traffic light timing and the presence or absence of zig-zagging joggers and casual cyclists. Once the Waymo algorithm learns the trick of driving through a specific intersection with a flashing yellow arrow, the “skill” becomes part of the knowledge base, shared with every vehicle across the fleet.
The new generation of high-fidelity 3D environments can be built with data from different sensor types to effectively convey all details of the material world to the algorithm. Existing 3D visual databases already include realistic details for traffic signs, pavement markings and road textures. With machine learning and deep learning algorithms, complex ADAS/AD scenarios can simulate close to real-life conditions.
Photo: Intellias
5. Digital twins of road infrastructure
While OEMs leverage dashcam data collection for building better navigation systems, transportation managers use the same intelligence to digitize road infrastructure. A digital twin is an interactive, virtual representation of physical assets or systems such as a smart traffic light network or smart parking facilities. Powered by real-time data, digital twins of road infrastructure can enable advanced urban planning scenarios. This includes dynamic traffic light signal optimization to reduce congestion as well as prioritized public and service transport management and accurate traffic predictions to optimize planning, signage, construction work schedules, etc.
Low latency is crucial for autonomous driving. Yet 3D map generation on the edge requires substantial computing power. Moreover, vehicles cannot store all mapping data on their route and need to constantly receive over-the-air updates. A group of researchers has proposed placing compact map distribution devices on roadside edges to facilitate point cloud data (PCD) map delivery on the go. The results show that autonomous vehicles can perform self-localization while downloading PCD maps. This system allows autonomous vehicles to receive dynamic new maps for each new destination instead of storing tremendous data records onboard.
6. AR in HUD navigation products
The latest vehicles have an upgraded human-machine interface (HMI)design, featuring new hardware and software elements that allow for AR navigation. AR in HUDs can deliver all standard information from static displays (driving speed, status of the ADAS system, fuel or charge levels), alongside dynamic routing instructions, including information on traffic signs, speed limits, construction work alerts and ETAs.
Overall, AR navigation systems can help drivers make better decisions on the road. A recent comparative study found that drivers using AR-augmented HUDs made fewer errors and drove faster on average than those using conventional HUDs. Participants also rated AR HUD instructions as more useful and easier to understand.
The next advance in navigation will be holographic displays, offering AR instructions in 3D. Advances in lidar technologies already allow for projecting ultra-HD holographic representations of road objects in real time into the driver’s field of view. Such systems can enable shorter obstacle visualization times and reduce driving-related stress, according to Tech Explore.
Brian Thompson, the CEO of UnitedHealthcare, was shot to death on Dec. 4 outside the New York Hilton Midtown in Manhattan, where the company was hosting an investor day. The suspect fled northward on 6th Avenue on a bike toward Central Park and is still unidentified.
Police initially believed the suspect fled on a Citi Bike, which is equipped with GPS tracking devices. However, it was later clarified that the suspect used a regular electric bike, not a Citi Bike, eliminating the possibility of GPS tracking through the bike-sharing system.
Many e-bikes do not come with built-in GPS trackers. While some newer models have integrated GPS units, aftermarket trackers must be installed separately on most e-bikes.
Even if the e-bike had a GPS tracker, its effectiveness would depend on whether it was active and connected to a cellular network to transmit location data.
Despite this setback, investigators are still utilizing various technological methods to track the suspect. Police are analyzing video from street cameras and other sources to trace the suspect’s escape route. Additionally, a cell phone was recovered from the alley where the suspect fled, which could potentially provide valuable information. The suspect was spotted on surveillance video carrying an e-bike battery less than two hours before the shooting, which might offer additional leads.
While GPS tracking through the bike is no longer an option, law enforcement is leveraging other technological resources and traditional investigative methods to locate the suspect.
Transportation continues to be a key application area for GNSS and related technologies — both directly, as with receivers on trains, and indirectly, as in airport construction. For this month’s cover story, I chose three transportation-related projects that showcase different aspects of this relationship:
The project to triple the size of the international airport in Lima, Peru, and transform it into the Jorge Chávez Airport City. I posed a few questions to Carlos Ruiz Miranda, chief surveyor at the Lima airport project with SACYR, a Madrid-based global concessions, engineering and infrastructure and services company that specializes in large-scale infrastructure projects.
A train safety project in Vélizy, France. I talked with Joel Korsakissok, president of Syntony GNSS, a French company, which partnered for this project with Hitachi Rail, a global company headquartered in London.
A navigation test on San Francisco’s Market Street using an INS-GNSS integration from ANELLO Photonics, which specializes in silicon photonics and sensory technology. I spoke to Kirstin Schauble, Ph.D., director of systems engineering.
Trimble: Peru builds South America’s first airport city
A construction worker at Lima’s airport uses a Trimble GNSS receiver and a TSC7 controller. Requirements included precisely positioning the bolts for more than 700 seismic isolators. (Photo: Trimble)
On April 3, 2023, the first commercial plane took off from a new 2.2 mile-long runway at the Jorge Chávez International Airport, in Lima, Peru, headed for Tarapoto with 140 passengers. That same day, a Peruvian Air Force jet was the first aircraft to land on the runway. Both aircraft were monitored from a new 213 ft.-high control tower with a 360° view of the airport.
The new infrastructure is part of a larger $2 billion project to triple the size of the airport, turning it into Jorge Chávez Airport City. Additionally, third-party investment for the construction will exceed $400 million in the first phase. The continent’s first such venture, it will enable Peru to become one of its principal aviation hubs. Spanning 2,310 acres, in addition to the new runway and control tower, it includes a 67-acre passenger terminal designed to handle about 40 million passengers a year.
Construction began in January 2022, and the expanded airport is scheduled to open in January 2025. It is a joint project of Lima Airport Partners — which operates more than 30 airports around the world — the Peruvian Ministry of Transportation and Communications, the Peruvian Airports and Commercial Aviation Corporation, and the aviation community in general, under the supervision of Ositran.
The modernization project’s scope and scale are matched by the means and methods used to build it. They include advanced surveying, grade control and coordination techniques in the field and about 2,700 active building information models (BIM) containing more than 50 miles of utilities that multiple contractors will construct. To fully synchronize the digital workflow between the field and the office, Ruiz led the transition from cloud-based collaboration software to a digital workflow. This improved coordination and productivity across departments and helped to keep the project on track.
The transition began by implementing a cloud-based common data environment (CDE), using Trimble Connect to provide a real-time, centralized collaboration platform for the construction crew, the field surveyors and the project’s managers. The CDE became a hub for managing data from field solutions, including laser scanners, UAVs, grade control systems, total stations, GNSS receivers and machine control systems on heavy earthmoving equipment.
A critical part of the terminal expansion is the airside airplane parking area around the terminal, which requires about 70,000 cubic meters of concrete and asphalt. The systems developed by the construction team enable the paving crew to achieve 10 mm accuracy, well below the 18 mm requirements.
Given the number of elements to this project in the terminal and surrounding areas, the SACYR survey team found that one of the best ways to facilitate the data flow between the office and the field is to use augmented reality (AR). “Initially, we tried using paper printouts to manually check for issues in the field. We tried Google Earth, but that was not satisfactory,” said Ruiz. Instead, SACYR turned to Trimble’s SiteVision AR software to provide real-time visualization of data, which improved decision-making and planning and reduced errors and costs.
Nearly 20 Trimble solutions were used in this project (see the sidebar), which helped to synchronize communication between field and office during construction, provided high accuracy results, and improved visualization and collaboration with the customer.
An aerial image shows the new terminal at Lima’s airport under construction. It will be able to handle up to 40 million passengers a year. (Photo: Trimble)
I asked Ruiz a few questions about the GNSS part of the project.
Q: What were the key challenges in surveying for this airport expansion project? Given the nature of the project and its location, multipath was probably not a problem. Also, the new runway and control tower were built away from existing air traffic, so that presumably was not a problem either.
A: The challenge has been organizing workflows between the field and the office. The location was not an issue for the project, but the limited space between the existing runway and the new one was. Nevertheless, it was not really an issue for construction.
Q: The airport will be the first one in South America to have seismic isolators to allow it to serve humanitarian flights following an earthquake. Did that pose any special challenges for surveyors?
A: Yes, it was a challenge for surveyors because there are more than 700 seismic isolators, and they each have anchor bolts that have precise tolerances to be embedded in the concrete. For this they used Trimble total stations.
Q: Did this project have any special requirements?
A: Special requirements were the precision of the seismic isolators, the precision of the plumbness of the columns and beams, and the precision of the leveling of the concrete of the parking spaces and the asphalt for the aircraft.
Q: What total stations were used?
A: A S5 1 second with TDC600, software access, a UHF 35Watt GPS data radio, and different GNSS receiver models for the project.
Q: The airport expansion is part of Lima’s new airport city. How was surveying for the former tied into the latter?
A: The benchmark control points certified by the Peruvian IGN will be left in place and become part of the LAP airport geodetic network.
Autonomous railway track detection
Redundant ssm receiver installation inside a test train in France. (Photo: Hitachi Rail and Syntony GNSS)
Around the world, efforts are underway to increase the safety of rail transportation — both for passengers and for communities along rail lines that are vulnerable to derailments that can lead to spills of harmful chemicals. The most notable recent example of the latter in the United States was the derailment of 38 cars of a freight train in East Palestine, Ohio, in February 2023, which forced the evacuation of a 1-mile radius around the spill.
Hitachi Rail and Syntony GNSS are collaborating on a train safety project in Vélizy, France. Members of the Hitachi Rail team wrote a paper1 on the project that they presented at the Institute of Navigation’s GNSS+ 2024 conference in Baltimore in September 2024. “Everybody is now trying to locate trains with the highest possible Safety Integrity Level (SIL), which is SIL 4,” said Korsakissok, discussing the project. “The partnership between Hitachi Rail and Syntony aims to reach this level by the end of 2025.”
Many modern automatic train operation (ATO) systems — an advanced technology that enables trains to run automatically without the need for a human driver — provide real-time information to the train about its location, speed and other important operational parameters. They use small radio beacons placed along the railway track, typically every third of a mile to half a mile, and an onboard antenna to collect the data. The problem with this positioning system is that it has high installation and maintenance costs. Therefore, the use of GNSS is seen as a major step toward train autonomy. However, due to local disturbances (masking and multipath), classical GNSS positioning methods can be inaccurate by up to many meters, which does not meet railway safety requirements.
The Hitachi Rail safety project in Vélizy is part of a global next-generation train positioning architecture. It supplements a stand-alone GNSS positioning solution with a satellite signal map matching technique and derived integrity methods. It uses cold start for track detection and requires neither motion nor a priori knowledge of the train’s position. The GNSS receiver used in this project is from Syntony GNSS.
A satellite signal map matching (SSM) algorithm developed for this project, in combination with accurate maps, computes the correlation between the received GNSS signal and a predicted PRN code for a chosen satellite, chosen epochs and a known georeferenced point from the map. In the absence of any errors, the user’s antenna would be expected to be located at the georeferenced point. However, this matching is never perfect, so the technique evaluates its quality based on its degree of correlation and the observed delays. It then uses several consolidation methods that take advantage of the whole set of available satellites.
“This approach is well suited to the track detection case of railway navigation when no previous knowledge of the position is given (at train cold start), as the algorithm is detecting a known position, while most of the current GNSS algorithms are estimating a position,” write the authors of the ION paper on the project, who are all members of the Hitachi Rail innovation team in Vélizy.
“The receiver embedded in the train is based on Syntony’s ORION receiver platform,” Korsakissok said. “ORION is a hardware platform that includes a system-on-chip (SoC) from Xilinx, inside which we put a GNSS software-defined radio (SDR) receiver that tracks the GPS L1/L5 and Galileo E1/E5a signals.” For Hitachi, Korsakissok continued, Syntony added a “map matching” feature to the receiver, “which is done in an original (and patented) way: All along the rail tracks, we define some ‘points of interest’ (POI) and the objective of the SSM algorithm is to detect the probability of going over one POI at a given time. Obviously, if there is only one track, and if the train goes from one station to the next, we know that it will pass over this POI, and the only question is when. Inversely, if there are two or more tracks, the most important question is on which track the train is, to avoid any collision. In this case, we define a set of POI on each track, and the key is for our SSM algorithm to tell us which one the train passed.”
The autonomous location software (ALS) used for this project runs on an industrial-grade computer approved for railway usage. Running tests are done in a lab with an antenna located both on the roof of the team’s building in Vélizy and on the train. A grid map from true line tracks is used in both cases.
“To our knowledge,” Korsakissok explained, “almost all train operators that are locating trains with GNSS for positive train control (PTC) or for the European Rail Traffic Management System (ERTMS) are solving this problem by measuring the distance between the position computed by the receiver and all present tracks, then choosing the lower one as the most probable. This can work well if the train is moving and if a hybridization algorithm is used with an inertial navigation system (INS) and odometry. However, it does not solve the so-called ‘cold start’ problem — which is that you cannot use the train’s last known position as the new starting point because it could have been moved without powering up its electronics. The SSM algorithm solves this issue, because it directly correlates each satellite signal that should be received if the receiver were exactly at the position of the targeted POI. This correlation algorithm will have a very strong peak as soon as the antenna is near the correct position. This method has been simulated and tested on real tracks and has shown very good and significant results.”
Once the project achieves SIL 4 — a milestone scheduled for late 2025 — Hitachi Rail will embed the receiver designed and manufactured by Syntony GNSS in its future lines and trains.
Inertial-assisted navigation in an urban canyon
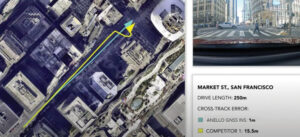
San Francisco’s market street, like all urban canyons, is a very challenging environment for satellite navigation. (Photo: Spondylolithesis / iStock / Getty Images Plus / Getty Images)
Urban canyons — city streets lined with tall buildings on both sides — present two challenges to GNSS: a limited view of the sky, thus a reduced number of satellites in view and a higher positional dilution of precision (PDOP) than under open sky, and multipath, as signals bounce off the vertical faces of the buildings before reaching receivers on the ground. This greatly complicates the tasks of accurate positioning and navigation — which is especially important for vehicles in congested city traffic, where it is essential that they do not stray from their lane.
Hundreds of research papers on possible solutions to the challenge of urban canyons have been presented at satellite navigation conferences over the years. One standard way to compensate for both a reduced number of satellites in view and multipath is to couple a GNSS receiver with an INS. GNSS and INS are inherently complementary technologies.
An INS consists essentially of an inertial measurement unit (IMU) and a computer. An IMU measures an object’s linear acceleration (typically, with three orthogonally mounted accelerometers) and angular velocity (typically, with three orthogonally mounted gyroscopes) in three axes. Because an IMU requires no external inputs, it can operate in tunnels, inside buildings and underwater, and is unaffected by such vagaries of the radiofrequency environment as jamming and spoofing. An INS integrates IMU data to compute positions that are very stable epoch to epoch. However, all inertial systems accumulate measurement errors, an effect known as drift, and therefore must be periodically re-initialized.
Conversely, GNSS-based navigation systems offer consistent absolute positioning accuracy, but their performance is severely degraded by a restricted view of the sky and multipath, two conditions characteristic of urban canyons, as well as RF interference (jamming and spoofing) and ionospheric disturbances.
Therefore, GNSS and INS, when coupled, assist each other beautifully: The INS takes over when the performance of the GNSS receiver is degraded or entirely impeded, then the latter re-initializes the former once it returns to full operation.
An INS provides another benefit for vehicle navigation. In addition to providing data about a vehicle’s trajectory, it also measures its attitude (roll, pitch and yaw), thereby enabling the software to better correlate and interpret the data from the other sensors. For example, when a car breaks sharply, its front end goes down and any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface. An INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and that in which the vehicle is pointing (true heading). A slip angle as small as 0.5° can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks.
A recent test in one famous urban canyon proved once again the value of GNSS-INS integration.
Market Street in San Francisco is one of the major routes across the city, with a diverse urban landscape. It poses numerous challenges in effectively navigating vehicles, especially autonomous ones, due to narrow streets with skyscrapers, resulting in limited sky view and severe multipath. ANELLO tested its GNSS INS here and evaluated the system’s performance in real-world driving conditions compared to other established inertial navigation systems solutions on the market.
Anello’s GNSS INS remains accurate despite multipath and a limited view of the sky. (Photo: ANELLO Photonics)
Market Street is a 3.5-mile urban artery that winds through diverse neighborhoods and commercial zones, presenting a formidable challenge for vehicle navigation as much due to its bustling traffic as for its towering urban canyons. The ANELLO GNSS INS addresses this complex environment by integrating data from its optical gyroscope with those from a GNSS receiver and wheel speed odometers using its sensor fusion engine and unique optical gyroscope technology. In addition to autonomous vehicles, it is also a good solution for agriculture, robotics, construction, trucking, mapping/surveying and defense applications.
To evaluate the performance of its GNSS INS, ANELLO installed it on a test vehicle together with a comparable system made by a different company. The ANELLO team then conducted multiple drives along Market Street, focusing its assessment on the system’s overall heading and positional accuracy. According to ANELLO, the system maintained a close alignment with the vehicle’s actual position along the entire route with a drift of about 1 m on multiple occasions, “significantly outperforming its competitor’s drift rates of 15.5 m, over a drive length of 250 m.”
“The interplay between GNSS and INS is like a tightly choreographed dance,” said Schauble, “where the choreographer is a sensor fusion algorithm. This algorithm continuously evaluates the quality of the GNSS and IMU measurements, assigning weights to each based on their reliability and accuracy.”
The accuracy of an INS is inherently dependent on the quality of its IMU. “When an INS system containing a MEMS IMU is used in an urban canyon, the algorithm is forced to either lean more heavily on the degraded GNSS measurements or accept the noisy and biased IMU measurements,” Schauble pointed out. “This often results in a poor and unpredictable solution in such environments. On the other hand, ANELLO’s GNSS INS leverages a silicon photonics optical gyroscope (SiPhOG) that provides significantly better bias and noise compared to MEMS IMUs. This makes the algorithms less vulnerable to degraded GNSS and multipath effects, allowing the INS solution to maintain accurate positioning in an urban canyon.”
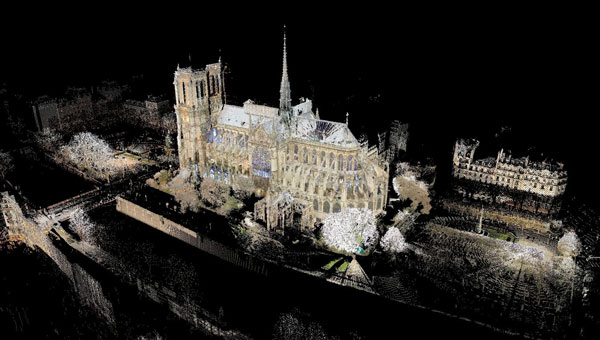
3D model of the Notre Dame Cathedral. (Image: Andrew Tallon/Vassar College)
Notre Dame Cathedral in Paris has reopened its doors five years after the devastating fire, showcasing its restored interior after extensive rebuilding work. The restoration, costing approximately €700 million ($737 million), was financed entirely by donations from around the world.
On April 15, 2019, Notre Dame went up in flames, with the spire collapsing and the roof being destroyed. The following years were dedicated to rebuilding the cathedral, including the reconstruction of the spire and the restoration of stained glass and woodwork.
A crucial element in the restoration process was the point cloud data collected by professor Andrew Tallon, an architectural historian from Vassar College, in 2010. Tallon’s project, which aimed to fully understand the Gothic structure and identify structural anomalies, involved creating a precise 3D model of Notre Dame using a Leica Geosystems terrestrial laser scanner.
This cloud of 1 billion points proved indispensable for the digital recreation of the cathedral’s interior and exterior. Tallon’s laser scans were the only truly accurate as-built measurements of Notre Dame, translating point clouds into detailed representations of its buttresses, ribbed vaults, stained glass, ornate carvings and other architectural details.
The value of point cloud data
While modern restoration efforts cannot fully replicate the artistry of centuries past, Tallon’s scans have been instrumental in reconstructing the Gothic cathedral, allowing architects to come remarkably close. Although Tallon died in 2018, his groundbreaking work remained a vital resource for restoring the iconic cathedral.
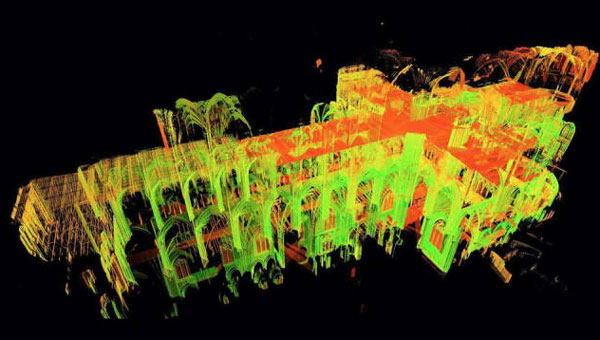
A point-cloud scan taken from Andrew Tallon’s scans of the Notre Dame Cathedral. (Photo: courtesy of Vassar University)
Tallon’s meticulous 3D scans of Notre Dame provided architects with information crucial for the cathedral’s reconstruction, including:
Precise 3D models: Tallon’s precise 3D model of Notre Dame included intricate details of the cathedral’s architecture, such as flying buttresses, rib vaults, stained glass windows and ornate carvings. This level of detail was unmatched by any historical drawings or records, which often lacked precision.
Dimensional and formal reconstruction: Pascal Prunet, one of the architects tasked with rebuilding the cathedral, said in an interview with Lindsay S. Cook that the point cloud data provided an “exact trace” of the cathedral’s state at the time of scanning, allowing him and his team to reconstruct elements — such as the vaults — “without hesitation” regarding dimensions or forms. This was essential for accurately rebuilding complex structures such as flying buttresses and rib vaults.
Structural analysis: The scans revealed structural details that were previously unknown, aiding in understanding how the cathedral was originally constructed and how it changed over time. This information was vital for designing custom supports and ensuring structural stability during reconstruction.
Integration with modern technology: The point cloud data was integrated into Building Information Modeling (BIM) processes, which allowed architects to create a digital twin of Notre Dame.
Restoration guidance: The scans provided a highly detailed record of Notre Dame’s pre-fire condition, which helped restoration professionals select appropriate techniques for stabilizing and rebuilding various parts of the cathedral.
Why precision matters
The two architects highlighted the crucial role Tallon’s laser scan of the cathedral played in their restoration process. They shared how this detailed digital model provided them with precise measurements and structural information, enabling Notre Dame to, in essence, “guide its own restoration.” By relying on this accurate data, the team could ensure its work remained faithful to the iconic cathedral’s original design and construction.
Tallon’s laser scan of Notre Dame Cathedral has proven invaluable in the restoration process. This digital twin, created in 2015, offers an unparalleled level of precision and detail, capturing the cathedral’s every nuance with accuracy up to 5 mm. This level of detail allows the restoration team to address the structure’s complexities and make informed decisions about the rebuilding process, ultimately helping to preserve Notre Dame’s authenticity and historical integrity.
YellowScan and Argosdyne have partnered to integrate YellowScan’s Surveyor Ultra OEM lidar system with Argosdyne’s newly C2 Class certified AQUILA-2 UAV. This collaboration aims to improve data acquisition and drone performance for various industries.
The C2 Class certification allows for safer operations near people and in urban areas, meeting European safety standards. Combined with YellowScan’s lidar technology, this certification allows for more precise and efficient data collection for surveying, mapping and environmental monitoring projects.
The integrated system captures detailed point cloud data and high-resolution imaging, providing comprehensive views of topography, structures, and vegetation. This technology can be applied in urban planning, construction, infrastructure inspection, and environmental science. Argosdyne’s AQUILA-2 UAV was showcased at INTERGEO 2024.
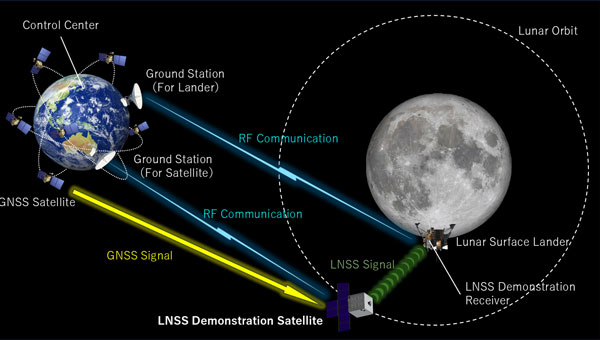
ArkEdge Space, a Japanese space start-up based in Tokyo, has been selected by the Japan Aerospace Exploration Agency (JAXA) under its Space Strategy Fund to lead the development of advanced lunar navigation technology.
Under the agreement, ArkEdge Space will plan and design the mass production and operation of micro-satellite constellations to lead the development of a next-generation Lunar Navigation Satellite System (LNSS), a vital component to the International “LunaNet” initiative driven by National Aeronautics and Space Administration (NASA), European Space Agency (ESA) and JAXA. LunaNet seeks to establish essential infrastructure to support sustainable lunar exploration and foster the growth of the lunar economy.
This program, supported by up to 5 billion yen ($32.5 million) over four years, tasks ArkEdge Space with developing a 100 kg class micro-satellite, developing crucial technology including the:
Lunar navigation payload
Demonstration satellite platform, along with a system operations plan
Establishment of an approach to mission evaluation
These efforts will help reduce development costs and timeframes while advancing core LNSS technologies and enabling the development of future lunar navigation system demonstration satellites, according to ArkEdge Space.
ArkEdge Space’s work on LNSS leverages its expertise in satellite technology and builds on its ongoing collaboration with JAXA. A key innovation of the project involves the use of faint GNSS signals, originally designed for Earth, to determine satellite position and time in lunar orbit—approximately 380,000 km from Earth. Additionally, LNSS complements advancements in low-Earth Orbit positioning navigation and timing (LEO-PNT) systems, designed to provide high-precision, robust navigation services globally, enhancing existing GNSS infrastructure.
As lunar exploration accelerates, high-precision infrastructure has become indispensable for activities such as rover navigation, base construction, and in-situ resource utilization. LNSS supports lunar operations and serves as a stepping stone for future exploration of Mars and deep space.
This is a challenging time for coral reefs. Although they cover less than 0.1% of the ocean floor, coral reefs support 25% of all marine creatures. Collectively, they form one of the planet’s most important ecosystems. Their health is in jeopardy due to increased ocean acidification, rising temperatures, pollution runoff, and overfishing and other destructive fishing practices.
The news is not uniformly bleak. A global study of coral reefs that seemed wildly ambitious when it launched in 2014 suggests that some coral reefs are showing impressive resilience. Some could even be considered thriving.
From the beginning, managing the study, dubbed the 100 Island Challenge, has depended on a creative and geographic approach.
Geographic information system (GIS) technology helped the 100 Island Challenge scientists define the initial scope of the study. Now it is allowing them to visualize and analyze the data they collect. GIS has also enabled the construction of environmental digital twins. In this case, the highly realistic and navigable 3D models depict many of the world’s major coral reefs, capturing flora and fauna in precise detail.
Reassessing Reefs
“I’m focused on coral reefs because it’s a great place to watch animals,” said Stuart Sandin, an ecology professor at Scripps Institution of Oceanography at UC San Diego. “Organisms are packed together, interacting with one another.”
Since the early 2010s, marine ecologists like Sandin have noted how reef health is indicative of a greater overall breakdown in ocean health.
“The timely issue was that we were seeing a ton of degradation,” he said. “It was no longer just a discussion about these ecological principles.” Coral health became a matter of global urgency that highlighted a possible tipping point, with coral decline contributing to biodiversity loss.
Sandin was drawn to the question of local and direct human influences, like overfishing and pollution. He realized that this was, at its roots, a spatial question and it was urgent. If humans were causing harm, changes could be made to reduce the impact. Analyzing the connection involved assessing the influence of humans on nearby reefs.
One of the earliest inquiries Sandin and his Scripps colleagues made involved the Line Islands, 11 atolls in the central Pacific Ocean, a thousand miles south of Hawaii. The mix of inhabited and uninhabited atolls belong to the Republic of Kiribati (pronounced “KIR-ee-bas”) and US territories.
Studies of the coral reefs near the uninhabited islands yielded positive results.
“The baseline ecosystems were everything we dreamt of,” Sandin said. “Tons of big sharks, big corals, clean water. We thought it was cool that those conditions still exist.”
When Sandin’s team turned to some of the Kiribati islands with small but growing human populations, the difference was stark. Human activity—particularly the modest amount of fishing done by residents of this small country—had degraded and even destroyed some of the reefs.
The results appeared to speak for themselves. Islands with no human presence had healthy reefs—those with people did not.
As Sandin looked at other islands around the world—including other more distant Kiribati islands—he discovered the strict dichotomy did not hold true. Some inhabited islands that had experienced many generations of fishing still had thriving coral ecosystems. The health of an island’s reef systems was not necessarily determined by human presence.
“I realized the human dimension was more than just binary,” Sandin said. “It wasn’t just presence versus absence. I knew we should start studying the variation of human use, where it works well and where it doesn’t.”
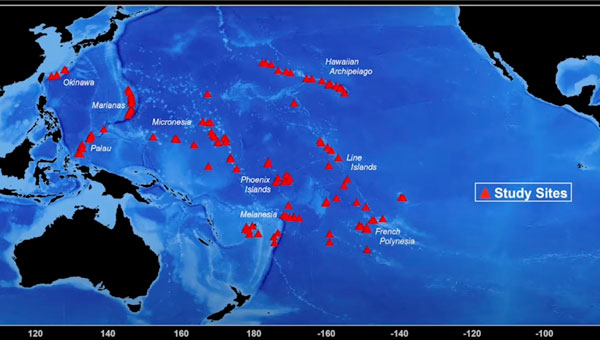
The selection of regions and islands within regions is strategic, with an aim to capture the variability of environmental conditions. (Photo: courtesy of the 100 Island Challenge team at Scripps Institution of Oceanography)
The Challenge Begins
A major challenge of studying ecosystems, even those as spatially concentrated as a coral reef, is the dizzying array of factors that affect their function. Sandin’s team defined 18 types of islands, based on such factors as the size of the human presence and the island’s geography.
The team members decided they should find five island examples of each of the 18 classifications, meaning the project was committed to studying 90 islands. Then they decided that adding 10 islands, bringing the total to 100, would give the study a more impressive pedigree. “We rounded up to make the T-shirts look better,” Sandin joked.
From the beginning, the 100 Island Challenge presented logistic hurdles. Sandin’s team had to research islands for possible inclusion, classify them, and maintain a globally dispersed atlas of candidates. The islands chosen are mostly concentrated throughout the Pacific, the Indian Ocean, and the Caribbean Sea. The team has attempted, whenever possible, to work with residents on each island to both ensure respect for its culture and maximize local knowledge.
“Every island has a story,” Sandin said. “And that’s why we had to go bigger.”
Mapping the Challenge
GIS maps played a key part of building the massive atlas, giving the team members an ongoing reference as they gathered data. The team aimed to visit each island in the study at least twice to monitor changes over time.
GIS also provided a way to determine specific observation sites for every island. From each of these vantage points, researchers can visualize key spatial relationships, including the location of reefs and human settlements, the size and extent of fishing industries, and freshwater sources that flow into the ocean.
The maps promote transparency. Shared with people who live on the inhabited islands, GIS maps help everyone understand the study’s objective of measuring ecological health.
The maps also support the data-gathering process, which includes both low- and high-tech components. Divers swim the reefs, making observations that fall in various categories, such as coral conditions and the amount of wildlife. These categories become individual data layers on the map.
Divers carry still cameras that record one geotagged image every second. This amounts to millions of images added to the map, documenting the conditions of reefs for further study.
A dual-camera rig captures high-resolution images that can be stitched into a 3D composite for ongoing analysis of each reef. (Photo: courtesy of the 100 Island Challenge team at Scripps Institution of Oceanography)
Coral Fights Back
“One of the first things we observed, with the help of image-based mapping products, is that the idea that every coral on the planet is suffering is a complete fallacy,” Sandin said. “What’s actually happening is that every coral on the planet is growing. But in patches, we’re seeing a lot of them die.”
The situation may not be universally dire, Sandin added, but it is urgent.
“Every coral we see is fighting,” he said. “They’re getting hit, site by site, by different stressors, like pollution and overfishing, and some of the hot-water events they can’t recover from. But there is resilience.”
The data-gathering cameras serve a dual purpose. They document reefs that have not been able to recover from the stressors, particularly those linked to climate change. At the same time, the cameras serve to document the resilience. Both objectives help researchers understand how coral can thrive under modern conditions.
Underwater Digital Twins
The amount of data collected by the 100 Island Challenge is staggering. And it’s all feeding into the digital twin.
“Right now, we’re actively involved in finding a way to deal with this petabyte of data, making it transparent and accessible,” Sandin said. “That’s where a lot of these spatial analytic tools and all the creative approaches to visualize data really come into play.”
Thanks to advances in data processing and GIS-enabled imaging, millions of images can be processed quickly. Aided by game engines, computers can stitch together realistic 3D digital twins of the reefs.
Scientists and GIS novices alike can, in effect, explore the reefs in stunning detail. The resolution, which approaches millimeter level, is high enough to see baby coral. The digital twins have also helped scientists understand the dispersal of adolescent and adult coral. GIS tools can even measure the buffering zones around different coral types in various stages of development to see how they interact with each other.
Granting a Voice
For those whose lives are deeply entwined with the reefs, the study’s GIS maps show the coral’s struggle to save itself.
“One of the stories that really struck me was when we were meeting with one of the governors of the southern states in Palau,” Sandin said. “We showed him printed maps and he said, ‘I’m a fisherman, and the fish talk to me. They can tell me what’s wrong. If there are too few fish, I go somewhere else. But the reef has never had a voice.’”
As Sandin recalled, the governor pointed to the map. “This,” he said, “gives the reef a voice.”
Propeller Drones has secured a $7 million contract with the Israel Electric Corporation (IEC) to conduct fully autonomous UAV operations for electrical infrastructure inspection. This project marks an advancement in beyond visual line of sight (BVLOS) drone operations in Israel, as it represents the first government approval for pre-approved BVLOS flights using an unmanned traffic management (UTM) system.
Under the collaboration, Propeller Drones and FlightOps will partner to enhance AI flight capabilities that meet IEC requirements and regulatory standards. Airwayz, a company specializing in low-altitude UTM solutions, has been selected to provide the UTM system for managing drone operations.
Airwayz’s UTM system, developed by experienced air traffic controllers, integrates real-time weather and location data to optimize airspace usage and manage multiple drone fleets simultaneously. This technology allows for efficient rerouting of unmanned vehicles in case of unexpected incidents.
The collaboration seeks to address long-standing regulatory challenges in the UAV industry by demonstrating the ability to conduct large-scale autonomous operations safely and efficiently. According to Propeller, this project has the potential to open up new opportunities for drone applications across various industries, particularly for inspections in hazardous or hard-to-reach areas.
As the system accumulates flight hours and data, it is expected to contribute to the advancement of autonomous BVLOS UAV operations, potentially influencing future regulatory approvals and industry standards. Propeller shared that the success of this project could pave the way for broader adoption of autonomous drone technologies in Israel and potentially serve as a model for other countries.
Among them was a funding increase for the National Physical Laboratory’s National Time Centre (NTC) project, from £30 million to £62.7 million, and a plan to have NTC and the first of the nation’s new eLoran towers at initial operating capability by January of 2027.
Plans for all efforts beyond next year were necessarily caveated with “subject to spending review.”
Still, seminar attendees were gratified to hear the minister endorse the ten-point PNT policy framework published by the previous administration in 2023. It was particularly encouraging that he also committed to operationalizing it with implemented systems.
The minister did not mention the UK’s significant investment in quantum research, which was discussed later in the seminar. This research has the potential to contribute to PNT with better timekeeping and inertial and gravimetric sensing. Three quantum hubs — one each in Scotland, the Midlands and the South — are part of this effort.
Lord Vallance, UK Science Minister. (Image: 10 Dowing Street)
Lord Vallance and Shabana Haque, Ph.D., the head of the National PNT Office, who spoke later, also mentioned two important non-technology themes.
The first theme was that the PNT office is fully funded, staffed and very active. It was created last year as a cross-government effort and included representation from the Ministry of Defence. In addition to pushing the nation’s PNT efforts forward, the office has been engaged with numerous other governments, including those of the United States, Canada, Australia, New Zealand, Europe, Japan and Korea.
Secondly, the PNT initiatives are necessary for the nation’s resilience and security but will also be a source of economic benefits. This goes beyond PNT resilience, enabling Britain’s economy to function during local and potentially widespread GNSS disruption events. As the nation develops the technology stack to support its own resilient PNT architecture, along with enabling and supporting policies, devices and services will become marketable to others.
Shabana Haque, Ph.D., head of the UK PNT Office, spoke to the RIN at its 2024 UK PNT Leadership Seminar. (Image: RIN)
A sovereign PNT capability that can both stand independently and cooperate with GNSS is becoming increasingly attractive to many nations. Being able to source such a capability from a respected and trusted ally such as Great Britain could make acquiring and implementing such a system much easier for many.
The UK government has been working with several partners to advance its understanding and planning implementation of an eLoran capability. Haque highlighted work with the ESA’s F)!NAVISP program, resulting in the UK’s Roke developing an eLoran antenna for handheld devices. She also discussed the integration of the National Timing Centre’s clock and fiber network with eLoran signals and the development of GNSS/eLoran receivers. Of particular interest to many was an “eLoran Effectiveness Report” that the government commissioned and received from the General Lighthouse Authority’s Research and Development (GRAD) team. GRAD has had extensive experience with the technology, having operated and evaluated a differential eLoran system along Britain’s east coast for more than a year.
In a related move that helped signal the UK’s commitment to the technology, the Ministry of Defence issued a request for information (RFI) about a deployable eLoran capability in September. The RFI indicated that the document was a prelude to an acquisition.
The UK Science Minister also praised the RIN’s work and publication of a series of tools to help explain PNT and the need for resilience to those outside the community. The tools will also help organizations evaluate their readiness for GNSS disruptions.
A PNT Resilience Checklist for organizations to use to self-evaluate their risk from GNSS disruptions.
The RIN recommends that PNT experts use these tools to work with customers, suppliers and partners and act as a “guiding hand.”
The RIN sees these all as a “phase 1 release.” Feedback on the tools is encouraged and should be sent to [email protected] The RIN team say they are eager to know what works, what could be improved, and to receive suggestions for other efforts.
As a “learned society,” the RIN has a significant influence on government policy and direction. Lord Vallance recognized this, saying that “the Royal Institute has played a really important role in recent years to highlight the PNT opportunity and risk, to provide expertise, and to work with government on solutions.”
The RIN’s director, John Pottle, and RIN Fellows Ramsey Faragher, Guy Buesnel and Andy Proctor were all recognized during the seminar for their contributions to the organization’s resilient PNT efforts.
Commercial eLoran to be offered in the UK
Hellen Systems, Inc. and Arqiva have partnered to develop a commercial eLoran service in the United Kingdom. The announcement was made on the Hellen Systems LinkedIn page.
The partners seek to support critical national infrastructure, government, and military users by citing the need for “sovereign, independent, resilient” PNT alternatives.
eLoran is deployed and operating across China and South Korea. Older versions of Loran are operating in Russia and Saudi Arabia. Yet, aside from a single transmitter in the UK being used as a timing signal, operating Loran systems have been off the air in the West since the European system shut down in deference to Galileo in 2016.
In recent years, increasing interference with GNSS signals has rekindled Western interest in the technology. The European Space Agency (ESA) recently sponsored a project that produced an eLoran antenna suitable for mobile devices. Three transmitters are on-air in the U.S., presumably for testing, and the UK Ministry of Defence has issued a request for information, which is expected to lead to the purchase of a deployable eLoran system (the U.S. Air Force operated a deployable capability called Loran-D in the 1970s).
Originally developed and used in World War II, some still view Loran as old technology. Its advocates counter that today’s telephones and televisions are vastly improved over 1940s technology, and the same is true for eLoran over its older Loran-A and Loran-C versions.
A high-power terrestrial system operating at 100kHz, UK demonstrations with differential eLoran in 2014 showed an accuracy of 10 m positioning and 50 ns timing. The positioning accuracy for the previous version of Loran, Loran-C, was approximately 460 m absolute accuracy, 90 m repeatable accuracy and 5 µs.
Hellen Systems’ President, Bridge Littleton, says the partnership is “… excited to bring commercial eLoran to the UK as a unique resilient PNT capability” and cites its advantages as a secure signal able to penetrate deep indoors without the need for an external antenna. The UK frequency regulator, Ofcom, proposed offering commercial eLoran licenses in 2022 and began the process in 2023. Hellen was granted a UK spectrum license for eLoran earlier this year.
The announcement also lists Microchip, Chronos Technology, Ltd, Continental Electronics, and CGI as team members in the project.