L3Harris Technologies has received a contract from the U.S. Space Force’s Space Systems Command to develop design concepts for Phase 0 of the Resilient Global Positioning System (R-GPS) program.
This initiative aims to enhance the existing GPS constellation by integrating cost-effective small satellites, providing increased resilience for both military and civilian users. The R-GPS program seeks to augment the current 31-satellite GPS constellation with up to eight additional satellites. The new satellites are designed to counter various threats, including jamming, spoofing and more, ensuring uninterrupted positioning, navigation and timing (PNT) services.
L3Harris has provided navigation technology for all U.S. GPS satellites launched to date. The company has also contributed to the development of control systems and monitoring receivers and user equipment for GPS. This experience serves as the basis for their proposed R-GPS solution.
L3Harris is leveraging its investments in transformational PNT technology to meet the Space Force’s evolving requirements by using commercial form factors and interfaces to create a modular, scalable solution, the company said. Additionally, L3Harris is collaborating with the Space Force as the prime contractor for the experimental Navigation Technology Satellite-3 program, which focuses on developing innovative technologies and accelerating development timelines.
Notre Dame de Paris, the French capital’s cathedral, has reopened its doors five years after a devastating fire, showcasing its restored interior after extensive rebuilding work. The restoration, costing approximately €700 million ($737 million), was financed entirely by donations from around the world.
On April 15, 2019, Notre Dame tragically went up in flames, with the spire collapsing and the roof being destroyed. The following years were dedicated to rebuilding the cathedral, including the reconstruction of the spire and the restoration of stained glass and woodwork.
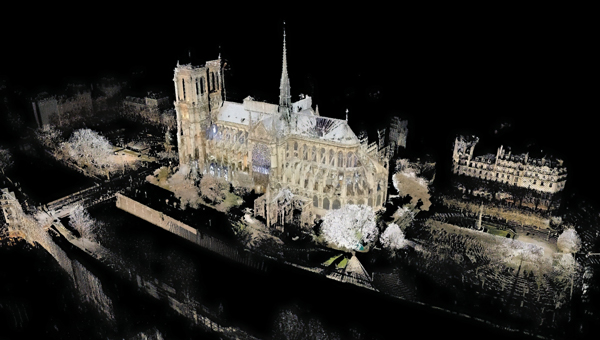
A crucial element in the restoration process was the point cloud data collected by Professor Andrew Tallon, an architectural historian from Vassar College, in 2010. Tallon’s project, which aimed to fully understand the Gothic structure and identify structural anomalies, involved creating a precise 3D model of Notre Dame using a Leica Geosystems terrestrial laser scanner.
This cloud of 1 billion points — with a TruView released by Leica Geosystems available to view here — proved to be indispensable for the digital recreation of the cathedral’s interior and exterior. Tallon’s laser scans were the only truly accurate as-built measurements of Notre Dame, translating point clouds into detailed representations of its buttresses, ribbed vaults, stained glass, ornate carvings and other architectural details.
Tallon, who died of cancer in November 2018, pioneered the use of laser technology to create a digital model of Notre Dame. Members of the restoration team and architectural historian Lindsay S. Cook — assistant teaching professor of architectural history at Pennsylvania State University, and a protégé of Tallon’s — said his work was critical to the cathedral’s rebuilding and refurbishing.
Tallon took some self-portraits as he mapped the cathedral. (Photo courtesy of the family of Andrew Tallon / Vassar College)
The value of point cloud data
While modern restoration efforts cannot fully replicate the artistry of centuries past, Tallon’s scans have been instrumental in reconstructing the Gothic cathedral, allowing architects to come remarkably close. Tallon’s groundbreaking work remained a vital resource for restoring the iconic cathedral to this day.
His meticulous 3D scans of Notre Dame provided architects with information crucial for the cathedral’s reconstruction, including:
Precise 3D models: Tallon’s precise 3D model of Notre Dame included intricate details of the cathedral’s architecture, such as flying buttresses, rib vaults, stained glass windows and ornate carvings. This level of detail was unmatched by any historical drawings or records, which often lacked precision.
Dimensional and formal reconstruction: Pascal Prunet, one of the architects tasked with rebuilding the cathedral, said in an interview with Lindsay S. Cook that the point cloud data provided an “exact trace” of the cathedral’s state at the time of scanning, allowing him and his team to reconstruct elements — such as the vaults — “without hesitation” regarding dimensions or forms. This was essential for accurately rebuilding complex structures such as flying buttresses and rib vaults.
Structural analysis: The scans revealed structural details that were previously unknown, aiding in understanding how the cathedral was originally constructed and how it changed over time. This information was vital for designing custom supports and ensuring structural stability during reconstruction.
Integration with modern technology: The point cloud data was integrated into Building Information Modeling (BIM) processes, which allowed architects to create a digital twin of Notre Dame.
Restoration guidance: The scans provided a highly detailed record of Notre Dame’s pre-fire condition, which helped restoration professionals select appropriate techniques for stabilizing and rebuilding various parts of the cathedral.
Tallon’s laser scans provided the only accurate as-built measurments of Notre Dame de Paris, capturing detailed representations of its architectural features. (Photo: Andrew Tallon (Vassar College / Columbia University))
Why precision matters
On Oct. 25, 2023, Philippe Villeneuve, architect in chief of historical monuments in charge of Notre Dame, and Pascal Prunet, a fellow restoration architect, delivered a Claflin Lecture at Vassar College in New York. They discussed their efforts to shore up, conserve and restore the cathedral since the devastating fire.
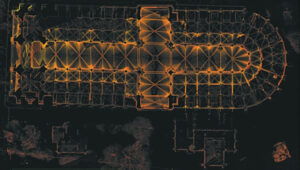
3D digital renderings were obtained from Tallon’s laser scans of Notre Dame Cathedral in Paris. (Photo: Andrew Tallon (Vassar College / Columbia University))
The two architects highlighted the crucial role Tallon’s laser scan of the cathedral played in their restoration process. They shared how this detailed digital model provided them with precise measurements and structural information, enabling Notre Dame to, in essence, “guide its own restoration.” By relying on this accurate data, the team could ensure its work remained faithful to the iconic cathedral’s original design and construction.
When speaking with Cook, Prunet shared, “At Notre Dame, we are doing an enormous amount of work, but we are not doing creative work; we are putting things back together again.” Villeneuve added, “What we’re doing isn’t very personal.” Tallon’s laser scan has enabled the architects to allow Notre Dame to “speak for itself,” according to Villeneuve.
Tallon had sent a copy of his point cloud to Villeneuve’s predecessor, Benjamin Mouton, before Mouton retired in 2013. After the 2019 fire, Marie Tallon saw that the architects had access to her late husband’s work. During their 2023 lecture and in a follow-up interview, Villeneuve and Prunet said Tallon’s scan — which Prunet called an “exact trace” of the state of the building at the time it was scanned — had been used in numerous ways since the fire.
For example, it aided the design of the wooden centering custom-made to cradle each unique flying buttress and rib vault and to rebuild the damaged vaults and the sole transverse arch destroyed when the tip of the spire separated from its base and fell westward, becoming a projectile that crashed into the nave.
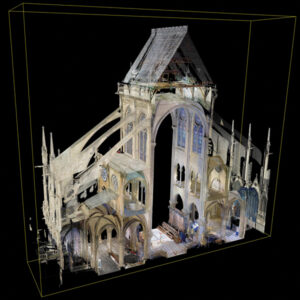
The point cloud data was integrated into Building Information Models (BIM) processes, which allowed architechts to create a digital twin of the cathedral. (Photo: Andrew Tallon (Vassar College / Columbia University))
“Andrew Tallon’s point cloud, well, it’s a bit like listening to a Mahler symphony,” said Prunet, alluding to the scan’s scale and complexity. Prunet continued, “It’s a recording,” but one that “needs to be decrypted.”
Tallon’s laser scan of Notre Dame has proven invaluable in the restoration process. This digital twin, created in 2015, offers unparalleled precision and detail, capturing the cathedral’s every nuance with accuracy up to 5 mm. This level of detail allowed the restoration team to address the structure’s complexities and make informed decisions about the rebuilding process, ultimately helping to preserve Notre Dame’s authenticity and historical integrity.
Swift Navigation and Quectel Wireless Solutions have partnered to enhance GNSS accuracy across various industries. This collaboration integrates Swift’s Skylark Precise Positioning Service with Quectel’s high-precision GNSS modules.
Skylark, a cloud-based GNSS corrections service, is designed to improve standard GNSS accuracy from several meters to a few centimeters. It utilizes advanced atmospheric modeling and a carrier-grade network to provide reliable, scalable, and high-integrity precision.
The partnership offers three Skylark variants: Skylark Cx , Skylark Nx RTK and Skylark Dx. Each variant is tailored to meet specific industry requirements and can be paired with Quectel’s GNSS modules for various applications.
Integration and Applications
Automotive: Quectel’s LG69T module with integrated inertial measurement units combined with Skylark Cx offers lane-level accuracy for intelligent driving systems.
Outdoor Robotics: The LG290P module paired with Skylark Nx RTK offers centimeter-level accuracy for autonomous robots such as robotic lawnmowers.
Micromobility: Quectel’s LC29H module with Skylark Dx achieves decimeter-level accuracy for e-bikes and scooters in urban areas.
UAVs: The LG290P module with Skylark Nx RTK offers high accuracy for fast-moving UAV applications.
Quectel’s LG290P is a quad-band GNSS module designed to deliver high performance for demanding applications, ensuring RTK availability and quality even in challenging environments. When paired with Skylark Nx RTK, the LG290P achieves the centimeter-level accuracy needed to ensure the precision required for applications such as precision agriculture, robotic lawnmowers, surveying and personal robots.
The LC29H module is a dual-band multi-constellation solution with optional dead-reckoning capabilities that supports seamless integration with all Skylark variants and comes in a standard 12.2mm × 16.0mm footprint. Developers can transition from standard positioning to high-precision GNSS without hardware changes while choosing the Skylark variant that meets their specific requirements.
Lockheed Martin has demonstrated an uncrewed capability with a surrogate HIMARS launcher. On Dec. 4, 2024, the company showcased the launcher’s ability to navigate autonomously using non-emitting perception sensors, enabling seamless day and night operations without a human crew.
This advancement marks a substantial step toward integrating autonomous solutions into the existing HIMARS fleet, supporting the U.S. Army’s modernization efforts for artillery capabilities. The technology offers enhanced adaptability in complex environments and aligns with Lockheed Martin’s 21st Century Security vision.
The autonomous HIMARS system is designed to be easily integrated into existing platforms, maximizing the Army’s investment while retaining the option for crewed operations. This flexibility allows for adaptation to changing mission requirements and supports all-domain deterrence.
Looking ahead, the Army envisions pairing manned HIMARS with autonomous wingman launchers for more efficient artillery operations. A follow-up demonstration is scheduled for the latter half of 2025.
u-blox has launched the UBX-M10150-CC, a GNSS chip designed for wearable devices. It offers advancements in size, power efficiency and performance for battery-powered devices.
The chip measures 2.39 x 2.39 x 0.55 mm, making it suitable for integration into small wearable devices such as sports watches and smartwatches — it also includes a mode specifically designed for open water swimming. The UBX-M10150-CC utilizes low energy accurate positioning technology, which achieves power consumption as low as 10mW. This technology, combined with smart adaptation to signal conditions, allows for a 50% reduction in power consumption compared to previous M10 chips, according to u-blox.
It incorporates multipath mitigation technology, which enhances position accuracy, particularly in urban environments where signal reflections are common. This feature can be beneficial for maintaining accurate tracking in challenging signal conditions, u-blox said.
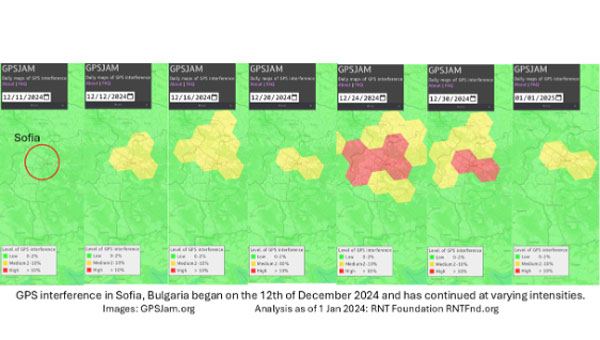
On Dec. 12, 2024, the European Union decided to include Bulgaria and Romania in the Schengen visa-free zone. On the same day, Bulgaria’s capital, Sofia, began experiencing interference with GPS signals. The interference, as reflected in aviation ADS-B systems and reported on GPSJam.org, continued through the new year and is ongoing as of this writing.
While these two events may be entirely unrelated, Vladimir Putin has a history of using GPS jamming and spoofing to show his displeasure with his neighbors growing closer to the West.
On Dec. 15, 2023, Poland activated a U.S. Aegis anti-missile system near its border with Kaliningrad, Russia. On the same day, Russia began jamming and spoofing GPS signals in northern Poland and parts of the Baltic. That interference persists to this day.
The interference in Sofia may be contributing to a prolonged Bulgarian political crisis. Politicians there have been struggling to form a new government since elections in October. Dec. 10 saw the beginning of a new attempt. Interference with GPS can undermine overall confidence in government systems and institutions — another of Putin’s goals for neighbors with whom he is displeased.
Another, though less likely, impact may be on Bulgaria’s electrical service. On Dec. 25, 2024, 20,000 households in western Bulgaria (Sofia is in the far west) lost electrical power and the outage continued for days. Many grid operators use GPS timing to help manage their systems. While press reports put the outages down to heavy snow and fallen trees, increased difficulty managing the grid might also be a factor.
Bulgaria’s GPS interference appears to be coming from somewhere in Sofia, not from Russian territory, as is the case in the Baltic. Yet Russia may still be involved, at least in a supporting role.
Well, it’s January 2025 and it’s almost here — that is, the release of the beta version of the new, modernized National Spatial Reference System (NSRS) – NATRF2022, PATRF2022, CATRF2022, MATRF2022 and NAPGD2022.
This newsletter will highlight some activities associated with the new NSRS. That said, this is short notice, but I would like to highlight that there is a webinar and workshop that will address the new NSRS scheduled for Jan. 9, 2025 — TRB workshop, “Navigating the Modernized National Spatial Reference System: A Geospatial Odyssey” and NGS webinar “Updates to Products and Models within the North American-Pacific Geopotential Datum of 2022.” I will provide more details on this later in the newsletter.
The modernization of the NSRS is scheduled to occur in 2025 or 2026. NGS intends to release associated tools and services within five years of the modernization. The following details from the Federal Register outline the process for the rollout of the modernized NSRS:
NGS plans to roll out components of the modernized NSRS in 2025 or 2026. As each component is released at beta.ngs.noaa.gov, it can be publicly tested with feedback provided to NGS. The testing will continue for at least six months after the final component is released on beta.ngs.noaa.gov.
Once testing is complete and all modernized NSRS components appear to be stable and correct, the Federal Geodetic Control Subcommittee (FGCS) will be asked to vote to approve the modernized NSRS (likely in 2026). If FGCS approves the modernized NSRS, NGS will publish an FRN announcing the approval of the modernized NSRS and begin a several-month process of transitioning all modernized NSRS components to the official website at geodesy.noaa.gov. During this transition, the beta website may be wiped of submitted data and no further submissions to the NGS IDB (the repository for the current NSRS) will be allowed.
Excerpt from Federal Register Notice. (Photo: Federal Register website)
What does “Only one major improvement to the current NSRS is expected during this time: ITRF2020 will be integrated in all products and services” mean? I understand that one product that ITRF 2020 will be integrated into is the NOAA CORS Network (NCN). The CORS coordinates and velocities will be updated with ITRF 2020 values. That said, NGS datasheets will still provide coordinates in NAD 83 (2011), epoch 2010.0.
As I’ve mentioned in previous newsletters, time really is running out and users need to obtain a working knowledge of the new, modernized National Spatial Reference System. For those attending the104th TRB Annual Meeting on Jan. 5-9, 2025, in Washington, D.C., there is a scheduled workshop on the modernized NSRS. The workshop is sponsored by TRB Geospatial Data Acquisition Technologies Committee (AKD70). The workshop, titled “Navigating the Modernized National Spatial Reference System: A Geospatial Odyssey,” will be held on Thursday, Jan. 9, 2025, from 9:00 am to noon, in room 202B in the Convention Center in Washington, D.C.
Thurs., Jan. 9, 2025 9:00 am to 12:00 pm Room 202B, Convention Center Washington, D.C.
This workshop will cover the following topics:
Why the NSRS is being updated
The key goals of the modernization effort
Timeline, standards and technology considerations
The Geospatial Data Act of 2018 and its impact
There will be a discussion about the replacement of the North American Datum of 1983 and vertical datums and implications for existing workflows
There will also be a discussion about use cases and practical scenarios, how to transition and how to leverage new technology and tools.
For those interested in more information on the TRB AKD70 committee, my August 2024 GPS World Newsletter highlighted activities associated with the Transportation Research Board’s ADK70 Standing Committee on Geospatial Data Acquisition Technologies.
Since the new NSRS will be introduced this year, it is time for users of the NSRS to get familiar with the NOAA Technical Memorandum NOS NGS 92 document titled “Classifications, Standards and Specifications for GNSS Geodetic Control Surveys using OPUS Projects” written by Dave Zenk and Dan Gillins, Ph.D., National Geodetic Survey, published on Oct. 23, 2024. This document provides the specifications users must adhere to when submitting GNSS projects to NGS for review and publication.
Photo: NGS website
The section below explains the purpose of the document. There are a few items that I have highlighted in the preface that users should be aware of:
The document replaces NOAA Technical Memorandum NOS NGS 58 and NOAA Technical Memorandum NOS NGS 59
Users will need to follow these specifications for all projects that will be submitted to NGS using OPUS Projects for review and publication
This publication supplements Standards and Specifications for Geodetic Control Networks issued in September 1984 (Bossler 1984).
This publication replaces NOAA Technical Memorandum NOS NGS 58 Guidelines for Establishing GPS-Derived Ellipsoid Heights (Standards: 2 cm and 5 cm), Version 4.3 (Zilkoski et al. 1997) and also replaces NOAA Technical Memorandum NOS NGS 59 Guidelines for Establishing GPS-Derived Orthometric Heights (Zilkoski et al. 2008).
This publication provides classification, standards, and specifications for GNSS geodetic control surveys that use Global Navigation Satellite Systems (GNSS), which will be submitted to NGS using OPUS Projects for review and publication. These types of surveys were not well-established by the dates of the 1984, 1997, and 2008 publications, nor did OPUS Projects exist. In addition, since 2008 GNSS technology has improved and considerable research has been done into the best practices regarding these surveys and the analyses of achievable results (e.g., Allahyari et al. 2018; El Shouny and Miky 2019; Gillins and Eddy 2015, 2017; Gillins et al. 2019a; Gillins et al. 2019b; Jamieson and Gillins 2018; Park et al. 2018; Schenewerk et al. 2016; Soler and Wang 2016; Wang and Soler 2013; Wang et al. 2017; Weaver et al. 2018). That research supports this publication.
This publication is specifically limited to supporting OPUS Projects (version 5.x), the current North American Datum of 1983 (NAD 83), the North American Vertical Datum of 1988 (NAVD 88) and other current vertical datums that are officially recognized by NGS. Future versions of OPUS Projects and future datums will require revision of this publication.
I highlighted some important sections of the April 2023 webinar in my May 2023 newsletter. Future newsletters will address the specifications in more detail, but I would encourage readers to download the NGS 92 document and the April 13 webinar and slides.
On Dec. 18, 2024, NGS sent an email to individuals on NGS’s listserv informing them that they have made several updates to the NAPGD2022 products and that these updates are now available on the NGS alpha site.
NGS Dec. 18 newsletter. (Photo: NGS website)
To explain the product updates, NGS has scheduled a webinar for Jan. 9, 2025, to discuss the North American-Pacific Geopotential Datum of 2022 (NAPGD2022).
As previously stated in my newsletters, users should obtain a working knowledge of the new, modernized National Spatial Reference System. NGS publicly given presentations that have been collected for public viewing can be downloaded here.
I would like to wish everyone a Happy New Year and a year filled with exciting opportunities.
The European Space Agency (ESA) will host the first FutureNAV Industry Day on Feb. 18, 2025 — at ESTEC, the Netherlands — to address the growing demand for advanced positioning, navigation and timing (PNT) technologies. This event aims to bring together European stakeholders in satellite navigation to discuss future developments and foster collaboration within PNT and GNSS sectors.
As the leading system developer and design authority for Galileo and EGNOS, ESA plays a crucial role in Europe’s satellite navigation landscape. The agency launched the FutureNAV program in 2022 to unify efforts in advancing navigation technologies. Two key missions under this initiative are low-Earth orbit (LEO) PNT, which will demonstrate the potential of navigation satellites in LEO and Genesis, which will combine four geodetic techniques in one satellite to improve Earth’s reference frame.
FutureNAV Industry Day seeks to provide attendees with insights into ESA navigation plans and potential opportunities for European industry. It will follow a Request for Information on LEO-PNT industrialization, gathering information on European production capabilities for payload building blocks and satellite platforms.
To complement these upstream initiatives, the Navigation Innovation and Support Programme (NAVISP) Industry Days will be held at the University of London on March 4-5, 2025, focusing on downstream applications and bringing together industry leaders and innovators.
Click here to register and learn more about the event.
The Overture Maps Foundation has released the general availability of its global transportation dataset. This dataset encompasses 86 million km of roads worldwide and is designed to support various industries, including automotive, logistics, navigation, urban planning and humanitarian response.
The transportation dataset incorporates detailed information from multiple sources:
Aerial imagery for accurate road representations
Clear road routes with recognizable highway signs
Comprehensive rail and ferry route information
Complex traffic rules and restrictions
Building upon OpenStreetMap data, Overture has re-engineered the data structure to create a more stable dataset with a documented schema, the company said.
Data enhancements
Overture has implemented several improvements to the OSM data, including:
Normalization: The dataset adheres to a standard set of attributes, ensuring uniformity across features such as right turns and speed limits. This seeks to facilitate simplified analysis, interpretation and use of the data.
Global Entity Reference System (GERS): Overture has introduced unique identifiers through a linear reference system. This allows users to attach external data, such as accident reports or road construction updates, to specific road segments with precise location information.
According to Overture, the transportation dataset will undergo continuous updates and improvements. Future enhancements will leverage artificial intelligence and other open data sources to maintain and expand the dataset’s accuracy and completeness.
Burro, an agricultural robotics provider, and GEODNET, a blockchain company providing precise GPS positioning solutions, have entered a strategic partnership to integrate GEODNET’s real-time kinematic (RTK) GPS technology into Burro’s autonomous robots.
Burro’s autonomous robots are designed for material transport in various agricultural settings, including nurseries, fields and farms. These robots utilize advanced artificial intelligence, computer vision and lidar technology to perform tasks with high precision. Integrating GEODNET’s RTK GPS technology seeks to significantly improve the robots’ navigation accuracy and operational efficiency, particularly in areas where reliable GPS coverage is crucial.
RTK can provide centimeter-level precision, compared to the 2 m to 4 m accuracy of traditional GPS systems, GEODNET said. The increased precision reduces overlap in field operations, minimizing fuel usage and time required to complete tasks. Precise positioning enables more accurate application of seeds, fertilizers and pesticides, reducing waste and improving crop yields.
The partnership between Burro and GEODNET will allow for the provision of RTK corrections and base stations to Burro’s robots. This capability is particularly valuable in regions with limited GPS coverage. The ability to rapidly deploy new base stations offers increased flexibility for users, allowing them to expand their operations quickly and efficiently.
Advanced Navigation has finalized a multi-million dollar deal with Rheinmetall Defense Australia to provide fiber-optic gyroscope (FOG) inertial navigation systems (INS) for integration into Rheinmetall’s Boxer Combat Reconnaissance Vehicles (CRV), currently deployed by the Australian Army.
This agreement builds upon a previous collaboration in 2021, where Advanced Navigation supplied over 200 FOG INS units for the Boxer CRV as part of the LAND 400 Phase 2 Program.
Arming the Boxer CRV with FOG INS technology
The FOG INS technology developed by Advanced Navigation incorporates sophisticated algorithmic capabilities, resulting in a compact yet powerful navigation solution that outperforms traditional filter-based systems.
The system incorporates Advanced Navigation’s algorithmic technology, enabling the FOG INS to provide navigation data that surpasses outputs based on traditional filter methods while maintaining a compact form factor. The optical gyroscope’s design, free from moving parts, ensures exceptional resilience against shock and vibration-induced errors – a crucial feature for vehicles traversing challenging terrains.
Validated in real-world operations, the FOG INS integrated into the Boxer CRV, an armored 8×8 vehicle, offers enhanced troop safety, security and protection, coupled with high levels of firepower and mobility for sustained operations ranging from peacekeeping to high-intensity combat. The Boxer CRV is equipped with a reconnaissance mission module, including the two-person digital Lance turret, the first crewed medium-caliber turret to be put into service on the Boxer platform.
This partnership between Rheinmetall and Advanced Navigation aligns with the objectives of the Australian Defense Global Supply Chain (GSC) Program, aimed at expanding opportunities for Australian suppliers and boosting export prospects within the global defense industry.
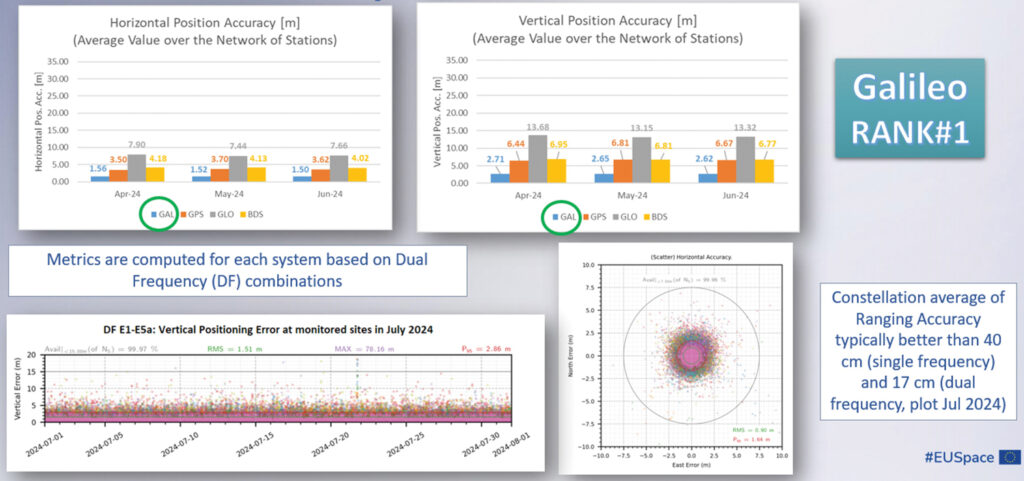
Galileo is Europe’s civil global navigation satellite constellation and a major success of the European Union (EU). It provides the world’s most precise satellite navigation performance. Galileo services began in December 2016 and are currently supplied to more than 3 billion users. They offer several high-performance services worldwide, featuring various levels of accuracy, robustness, authentication and security.
Galileo is a key component of mass-market applications for such areas as transport, agriculture and timing but also for security-critical applications, such as health services, emergency and rescue services and law enforcement. Galileo services continue to expand with many new capabilities that are unique with respect to other GNSS.
The European Union Agency for the Space Programme (EUSPA) and the European Space Agency (ESA) continue to collaborate effectively on the many developments, deployments and evolution activities of the Galileo Programme, each according to their respective responsibilities for exploitation and system development, with the European Commission acting as the program manager.
Stable Service Performance
Galileo services continue to deliver excellent performance every month in a safe, secured and seamless manner, managed by EUSPA. The performance parameters of the Galileo services are independently monitored by the Galileo Reference Centre (GRC) and are regularly published on the web portal of the GNSS Service Centre (GSC): gsc-europa.eu.
The performance of the Open Service (OS) remains “Best in Class” among the GNSS providers. Timing users also continue to receive accurate (in the order of 5 ns) access to Galileo System Time, which they can trace to Universal Coordinated Time (UTC) through the corresponding offset parameters transmitted by the satellites.
The Search and Rescue (SAR) service was delivered well beyond the commitment to the users, for both forward and return link services, while the High Accuracy Service (HAS) and the Public Regulated Service (PRS) continue being provided as planned in the corresponding Service Definition Document (SDD).