ArkEdge Space successfully launched its micro-satellite AE1a on March 30, and has begun initial checkout following the establishment of communications through test radio signals.
AE1a is a technology demonstration satellite developed to advance maritime digitalization by enabling wide-area, real-time vessel tracking and communications. The satellite adopts ArkEdge Space’s standardized 6U satellite bus in its large-antenna configuration. In addition to demonstrating a deployable antenna for VDES (VHF Data Exchange System) applications, AE1a will improve and validate core technologies for a VDES receiver.
AE1a will operate in coordination with AE1d, which began operations in January 2025, and AE3Va, which began operations in June 2025, forming a three-satellite constellation for demonstration across wide-area maritime areas.
AE3Va continues to acquire AIS signals across multiple sea areas, including waters around Japan and vessel-congested areas along critical shipping lanes. Accumulated reception data is being systematically verified and analyzed.
Going forward, the program will advance from reception-focused demonstration to two-way communications, including transmission from orbit. This will enable satellites to deliver operational information directly to vessels, expanding the scope of VDES demonstration and advancing progress toward concrete use-case validation across the maritime sector.
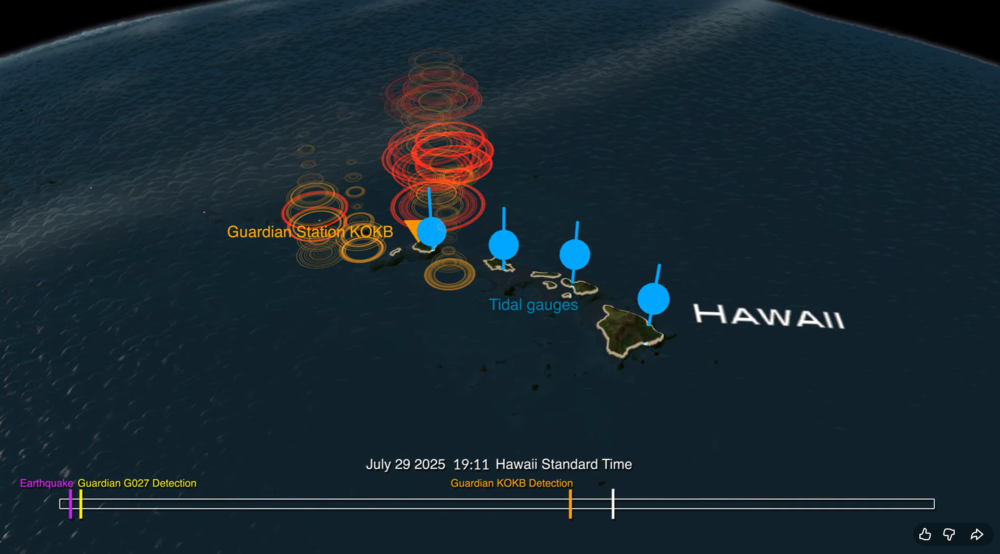
A new data visualization illustrates how an experimental NASA technology can provide extra lead time to communities in the path of a tsunami. Called GUARDIAN (GNSS Upper Atmospheric Real-time Disaster Information and Alert Network), the software detects slight distortions in satellite navigation signals to spot hazards on the move.
The animation breaks down a real-life case study: 2025’s massive Kamchatka earthquake and the tsunami that it sent racing across the Pacific and towards Hawaii at more than 500 mph (805 kph).
The visualization shows the magnitude 8.8 earthquake (seen in purple) strike off the Russian coast on July 29, 2025, triggering the tsunami. The red, orange, yellow, and green ringlets represent real-time readings from ground stations tracking GPS and other navigational satellite signals. The disturbances were spotted by GUARDIAN’s artificial intelligence-powered detection algorithms as soon as eight minutes after the earthquake.
For the next several hours, signs of the tsunami were picked up by GUARDIAN across the Pacific Ocean in near real time. The system flagged an incoming wave off the coast of Kauai some 32 minutes before it made landfall and was detected by tide gauges (shown in blue).
The results highlight GUARDIAN’s potential to augment existing early warning systems, said Camille Martire, one of its developers at NASA’s Jet Propulsion Laboratory in Southern California.
Currently, determining whether an earthquake generated a tsunami remains a challenge. Forecasters rely on seismic data and computer simulations to make their best prediction, then wait for pressure sensors attached to the ocean floor to confirm a passing wave. Those sensors work well but are expensive and thinly dispersed. Gaps in coverage remain. And in those gaps, warning time disappears.
The GUARDIAN approach is complementary and cost effective because it monitors existing data from GPS and other constellations that make up the Global Navigation Satellite System. It’s also free to access, though for now best suited to analysts trained to interpret its findings.
How GUARDIAN works
All day, every day, geopositioning constellations transmit radio signals to ground stations around the globe. On the ground, the data is refined to sub-decimeter (less than 10 centimeters) positioning accuracy by JPL’s Global Differential GPS System. Before the signals get there, however, they must travel through an electrically charged skin of plasma called the ionosphere.
Solar storms and other space weather can wreak electrical mayhem in the ionosphere, and so can events on Earth. Tsunamis and earthquakes, by displacing large amount of air at Earth’s surface, unleash pressure waves that can slightly perturb the radio signals coming down from satellites. While systems are in place to correct for this “noise,” GUARDIAN considers it a useful signal.
Currently, GUARDIAN scours data from more than 350 GNSS ground stations around the Pacific Ring of Fire, a hotbed for the ocean’s deadliest waves. And the system is not confined to tsunamis. Earthquakes, volcanic eruptions, missile tests, spacecraft reentries, meteoroid splashdowns — anything that produces a large rumble on Earth is potentially fair game. While the Kamchatka event didn’t cause widespread damage to people or property, it showed how the next time disaster strikes, NASA science could give communities a few more minutes to act.
GUARDIAN is being developed at JPL by the GDGPS project, which is partially supported by NASA’s Space Geodesy Project.
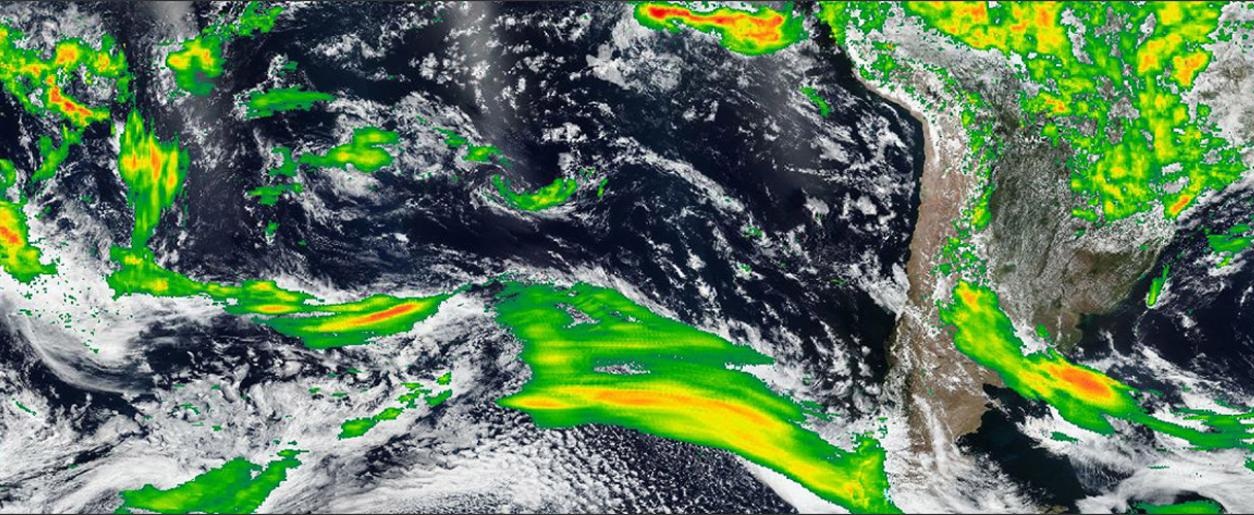
The NASA Goddard Earth Sciences Data and Information Services Center (GES DISC) and principal investigator Stephen Leroy of JANUS Research Group have released GNSS Radio Occultation (GNSS-RO) datasets.
The data release includes 72 different products from 15 different GNSS-RO receivers (or constellations of receivers) processed at four different GNSS-RO retrieval/processing centers. The data from different processing centers have been reformatted to have a common Climate and Forecast Metadata Conventions (CF) compliant format.
The algorithm was developed with funding from the NASA ACCESS 2019 program and the NASA Supplements for Open Science Support. These are the version 2.0 GNSS-RO products; version 1.1 is available through the AWS Registry of Open Data.
GNSS-RO data undergoes processing that is radically different from that of most atmospheric sounders, but it can still be categorized by its processing step:
uncalibrated data, as provided by the satellite instrument with communication information stripped, are Level 1a (not part of this release);
calibrated data, wherein the clock biases of the transmitters and receivers are removed and precise orbits determined are Level 1b;
extremely high vertical-resolution profiles of RO bending angle and microwave refractivity are Level 2a; and
profiles of temperature, pressure, and specific humidity on a coarser vertical grid are Level 2b.
Products are still being added to the archive. This initial release is complete for all processing levels of the COSMIC-1 data sets from four different processing centers. After all of the products in the initial release are complete for available data through July 2025, the project will bebegin forward processing for missions still actively producing data.
For more information about these products please see the README document and the Algorithm Theoretical Basis Document (ATBD).
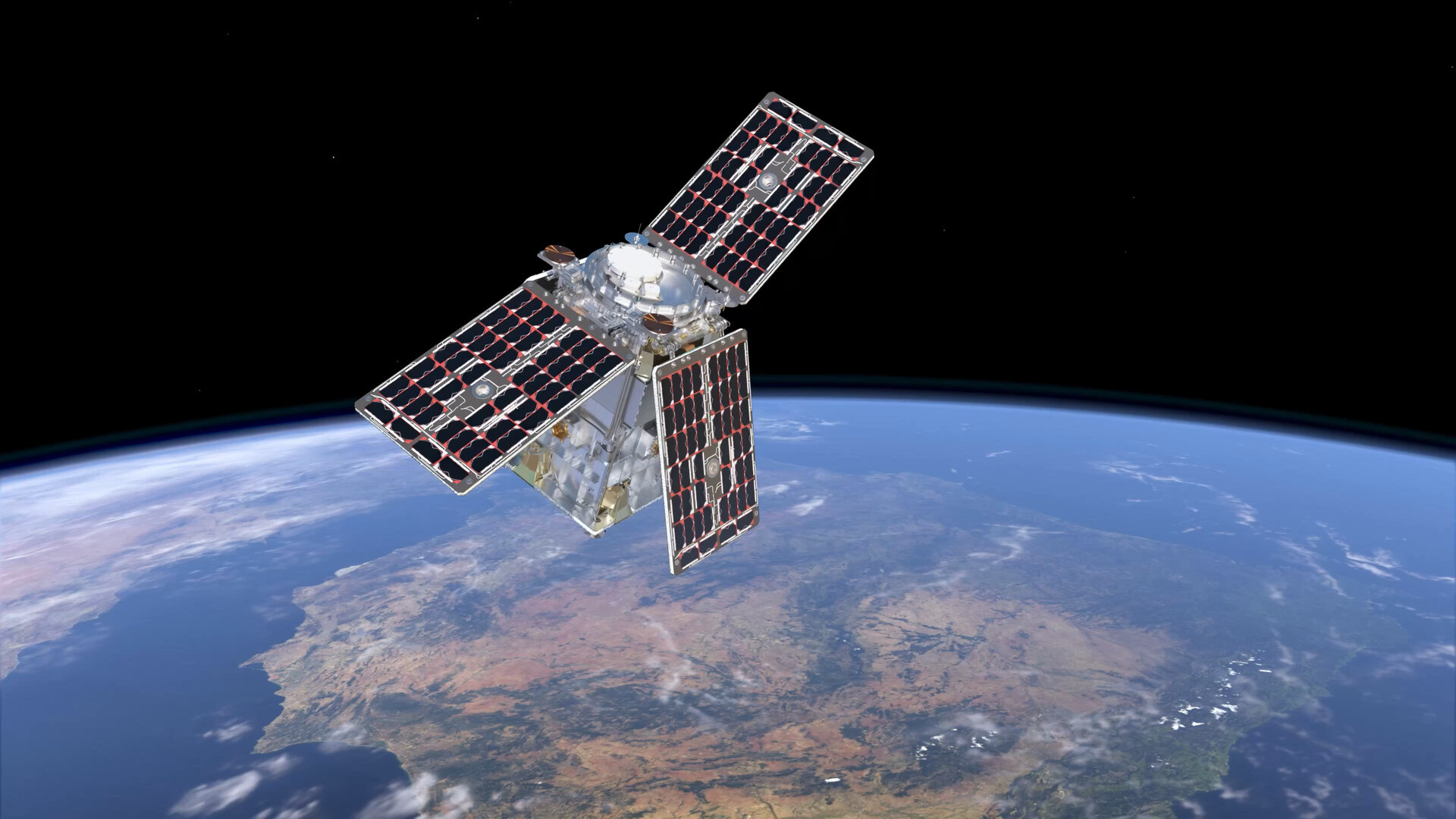
Ultra-low-noise amplifiers developed by European Engineering Consultancy Ltd. (EECL) are operating in orbit on the European Space Agency’s (ESA’s) HydroGNSS mission, marking a technical milestone for the hardware following the satellites’ launch in November 2025.
HydroGNSS consists of two small satellites designed to measure hydrological and climate-related variables using GNSS reflectometry. The satellites collect signals transmitted by navigation satellites such as GPS and Galileo and analyze those signals after they reflect from Earth’s surface. The reflected signals provide data on environmental parameters including soil moisture, freeze–thaw conditions in permafrost regions, wetlands and inundation, and above-ground biomass.
The satellites were launched aboard a SpaceX Falcon 9 rideshare mission from Vandenberg Space Force Base in California on Nov. 28, 2025. The mission is part of the European Space Agency’s Scout program, which focuses on relatively small and cost-effective Earth observation satellites designed to demonstrate new measurement techniques.
EECL designed and manufactured six multiband ultra-low-noise microwave amplifiers used in the spacecraft payload. The amplifiers are part of the radio-frequency front end of the receiver system and are designed to amplify very weak reflected GNSS signals while minimizing additional noise, helping preserve signal quality for scientific analysis.
Early on-orbit results indicate the satellites’ payloads are functioning as expected. Both spacecraft have begun collecting delay-Doppler maps of reflected GNSS signals, an early step in commissioning that confirms the receivers are acquiring and processing signals properly.
The HydroGNSS satellites were built by Surrey Satellite Technology Ltd., which also developed the GNSS receiver used on the mission. The spacecraft operate in low Earth orbit and are phased apart to increase global coverage of the measurements.
Data from HydroGNSS are expected to support research on the global water cycle and contribute to studies related to climate monitoring, agriculture, flood risk and ecosystem changes.
Türkiye is no stranger to earthquakes. In February 2023, a devastating 7.8-magnitude earthquake struck near the Türkiye-Syria border, followed by another nearly as strong.
Six Turkish universities have launched a real-time geodetic monitoring network to track earthquake-related ground deformation across Thrace and the Southern Marmara region, reports Hürriyet Daily News.
TR-TRAK-GNSS will monitor seismic and tectonic activity using 28 GNSS stations. The system is designed to evolve into a major scientific and early-warning infrastructure capable of detecting tectonic deformation in real time and identifying structural movements in buildings across cities and university campuses.
Once fully deployed, the network will form a continuous monitoring ring encircling Thrace and Southern Marmara.
The project will be financed through each participating university’s Scientific Research Projects resources, with institutions covering the installation costs of GNSS stations within their own areas of responsibility.
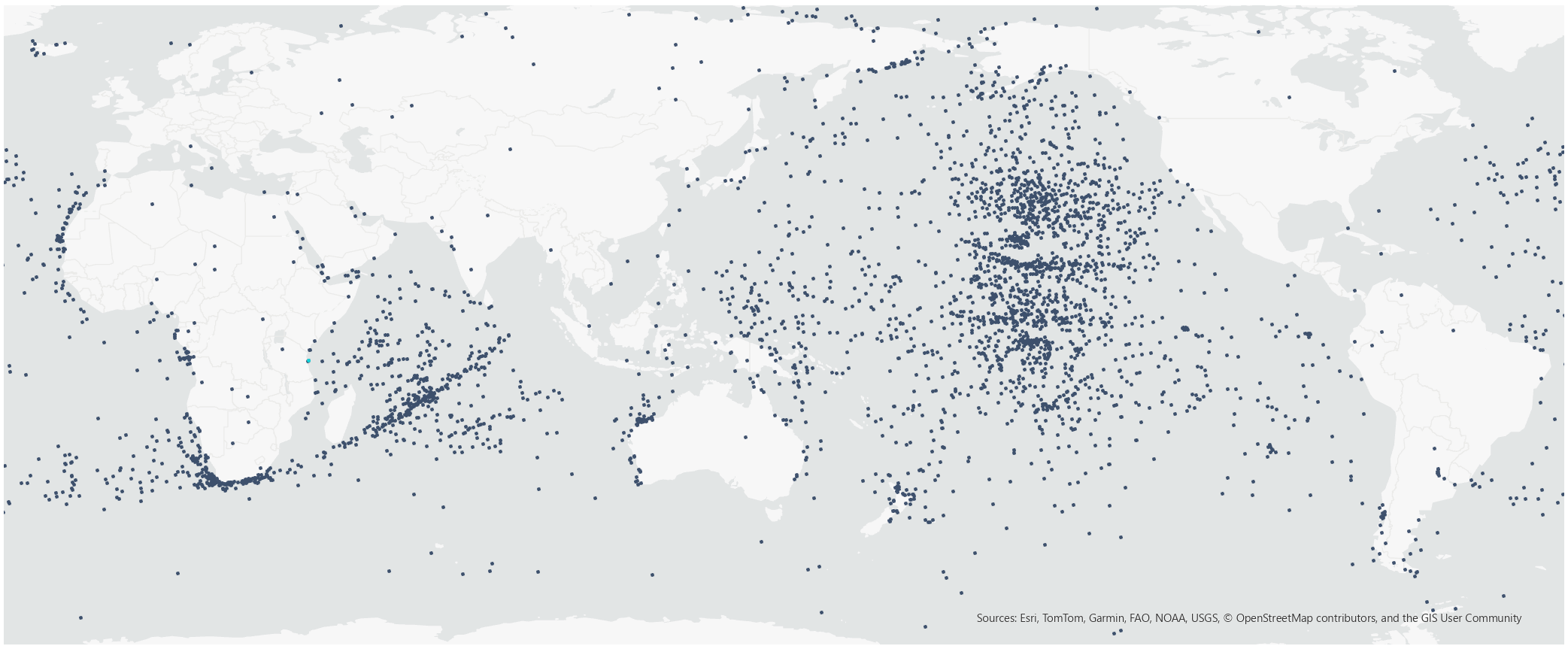
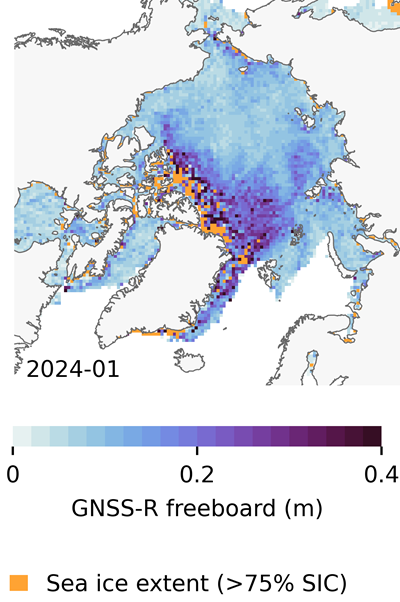
In recent years, scientists have shown that detecting changes in navigation signals from GPS and Galileo after they bounce off Earth’s surface (GNSS reflectometry, or GNSS-R) can deliver valuable information on sea ice. Now research drawing on data from Spire Global has enabled the generation of Arctic-wide sea ice maps, marking a major step forward for the emerging technique.
Spire Global‘s sea ice freeboard maps use data captured by Spire’s GNSS-reflectometry multipurpose listening constellation.
The research — enabled by the Third Party Missions (TPM) programme of the European Space Agency (ESA) — suggests that harnessing reflected navigation signals could become an important complement to established ice-monitoring altimetry missions.
The study leveraged Spire’s GNSS-R data to retrieve sea ice freeboard measurements across an entire winter season. The results show strong alignment with established altimetry datasets, including the ESA’s CryoSat mission, validating the complementary role of commercial satellite data alongside government missions.
Arctic-wide sea ice freeboard map for January 2024. (Credit: ESA)
The study was led by Felix Müller at the Technical University of Munich (DGFI-TUM) and Robert Ricker at the Norwegian Research Centre, experts in GNSS-R.
“The primary purpose of signals emitted from GNSS is to fix the location of a device at any point on Earth,” Müller explained. “However, when these signals bounce off Earth’s surface, their properties change. By analyzing these changes, we can infer information about the characteristics of Earth’s surface.”
“Previous research has shown that this technique works well experimentally,” Ricker added. “Using the Spire constellation, we aimed to demonstrate whether it would hold up on a larger scale by generating an Arctic-wide map of sea ice freeboard, which is a measure of how far ice protrudes above the waterline.”
Spire’s GNSS-R constellation
Spire’s constellation was first used to sample the atmosphere for weather forecasting. Then scientists began exploring other applications. Spire started collecting reflected signals arriving at shallow angles using a technique called grazing-angle GNSS-R. This method is particularly well suited for ice monitoring.
The research team analyzed data detected over the Arctic Ocean and surrounding seas between October 2023 and July 2024. The data was obtained via the TPM program, through which ESA disseminates data from a range of commercial and institutional partners on a free basis for research and development purposes.
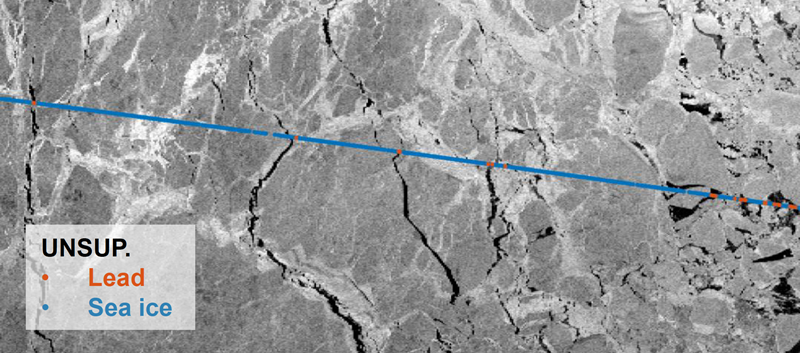
The team focused on one of the most critical challenges in sea ice altimetry: reliably identifying narrow openings in the ice pack, known as leads. These openings are reference points for determining sea surface height and, ultimately, sea ice freeboard.
In turn, sea ice freeboard can be used to infer sea ice thickness — an essential parameter for tracking climate change, estimating sea level, and modeling ocean and weather patterns.
Identifying leads in sea ice with GNSS-R data. (Credit: ESA)
Classifying surface properties
“In the initial phase of the project, we used two complementary methods to identify surface properties based on GNSS-R data, with the aim of identifying leads,” Müller said.
The first — known as the adaptive threshold technique — involved measuring the power of the reflected navigation signal to classify surface type as either water or ice. This method allows rapid processing of the entire GNSS-R dataset, while remaining robust to changes in signal conditions.
The second method — known as unsupervised clustering — offers a more complex approach to classifying surface conditions. In addition to signal power, it considers multiple other signal features that tease out more nuanced information on surface type, including identifying thin or refrozen ice.
Both methods were compared with co-located CryoSat surface-type classifications and Sentinel-1 imagery, confirming that the GNSS-R classifications were largely comparable against conventional satellite products.
Mapping sea ice freeboard
“Building on this classification work, we then took the research to the next step by producing Arctic-wide sea ice freeboard maps from GNSS-R data,” Ricker said.
The team corrected ice surface height measurements generated from GNSS-R data for tidal variations, sea surface height, and atmospheric delays, which is standard practice in altimetry. A refined algorithm then identified where leads in the ice were likely to occur, with the lowest points in these areas revealing estimated sea surface height. Sea surface height estimates were then subtracted from ice surface heights to retrieve freeboard. Using this approach, monthly gridded freeboard products were generated for the full winter season.
The team reported that the GNSS-R datasets showed strong agreement with CryoSat freeboard datasets across much of the Arctic, confirming that GNSS-R can reproduce large-scale patterns previously observed by dedicated altimetry missions. Independent validation against upward-looking sonar measurements in the Beaufort Sea further supported the accuracy of the retrieved freeboard values.
However, as expected, the GNSS-R estimates became less reliable during spring, when surface melt alters reflection characteristics. This limitation is consistent with earlier GNSS-R and radar altimetry studies and remains an active area of research.
The contribution of commercial data
While GNSS signals have long been used for positioning, this research highlights how reflected signal analysis can extend their value into large-scale Earth observation applications, delivering persistent coverage independent of sunlight or weather conditions, said Theresa Condor, Spire Global CEO.
“Advances in miniaturization, digital signal processing, and machine learning have fundamentally changed what’s possible in RF sensing,” Condor said. “Commercial constellations can now deliver persistent, high-quality RF data that complements traditional government systems with greater flexibility and cost efficiency.
“As environmental monitoring requirements intensify, we’re seeing agencies increasingly integrate commercially sourced RF datasets into operational architectures, reflecting the continued maturation of this market and the growing role of commercial infrastructure in government missions.”
“By producing analysis-ready gridded datasets, this work marks an important milestone in the progress of grazing angle GNSS-R from an experimental method to a reliable technique for mapping Arctic sea ice freeboard at scale,” said Matthieu Talpe, Remote Sensing Product Engineer, Spire Global. “In doing so, it strengthens the case for the grazing angle GNSS-R technique employed by the Spire constellation as a valuable complement to existing ESA and partner missions, helping to close observational gaps in one of Earth’s most rapidly changing regions.”
A new technology called Mars Global Localization lets Perseverance determine precisely where it is, without human help.
Imagine you’re all alone, driving along in a rocky, unforgiving desert with no roads, no map, no GPS, and no more than one phone call a day for someone to inform you exactly where you are. That’s what NASA’s Perseverance rover has been experiencing since landing on Mars five years ago. Though it carries time-tested tools for determining its general location, the rover has needed operators on Earth to tell it precisely where it is — until now.
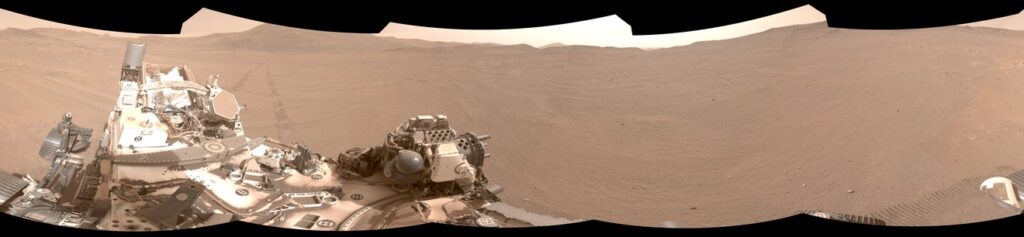
A new technology developed at NASA’s Jet Propulsion Laboratory in Southern California enables Perseverance to figure out its whereabouts without calling humans for help. Dubbed Mars Global Localization, the technology features an algorithm that rapidly compares panoramic images from the rover’s navigation cameras with onboard orbital terrain maps.
Running on a powerful processor that Perseverance originally used to communicate with the Ingenuity Mars Helicopter, the algorithm takes about two minutes to pinpoint the rover’s location within some 10 inches (25 centimeters). Mars Global Localization was first used successfully in regular mission operations on Feb. 2, then again Feb. 16.
“This is kind of like giving the rover GPS. Now it can determine its own location on Mars,” said JPL’s Vandi Verma, chief engineer of robotics operations for the mission. “It means the rover will be able to drive for much longer distances autonomously, so we’ll explore more of the planet and get more science. And it could be used by almost any other rover traveling fast and far.”
This panorama from Perseverance is composed of five stereo pairs of navigation camera images that the rover matched to orbital imagery in order to pinpoint its position on Feb. 2, 2026, using a technology called Mars Global Localization. (Credit: NASA/JPL-Caltech)
The upgrade is especially valuable given how well Perseverance’s auto-navigation self-driving system has been working. Enabling the rover to re-plan its path around obstacles en route to a preestablished destination, AutoNav has proved so capable that the distance Perseverance can drive without instructions from Earth is largely limited by the rover’s uncertainty about its whereabouts. Now that it can stop and determine its exact location, Perseverance can be commanded to drive to potentially unlimited distances without calling home.
Implementation of Mars Global Localization comes on the heels of another innovation from the Perseverance team: the first use of generative artificial intelligence to help plan a drive route by selecting waypoints for the rover, which are normally chosen by human rover operators. Both technologies enable Perseverance to travel farther and faster while minimizing team workload.
Beyond visual odometry
Unlike on Earth, there is no network of GPS satellites in deep space to locate spacecraft on planetary surfaces. So missions — whether robotic or crewed — must come up with other ways to determine their location.
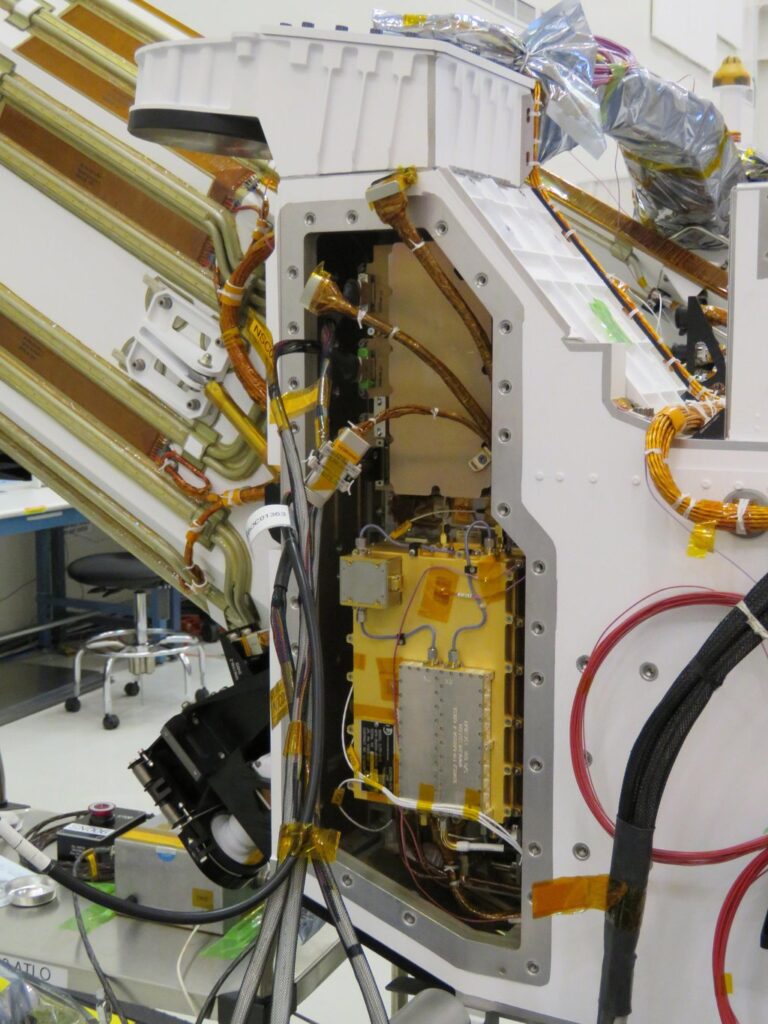
The Mars Global Localization algorithm runs on a fast commercial processor in the Helicopter Base Station — the upper, gold-colored box that was integrated into NASA’s Perseverance rover in a clean room. Perseverance used the base station to communicate with the now-retired Ingenuity Mars Helicopter. (Credit: NASA/JPL-Caltech)
As with NASA’s previous Mars rovers, Perseverance tracks its position using what’s called visual odometry, analyzing geologic features in camera images taken every few feet while accounting for wheel slippage. But as tiny errors in the process add up over the course of each drive, the rover becomes increasingly unsure about its exact location. On long drives, the rover’s sense of its position can be off by more than 100 feet (up to 35 meters). Believing it may be too close to hazardous terrain, Perseverance may prematurely end its drive and wait for instructions from Earth.
“Humans have to tell it, ‘You’re not lost, you’re safe. Keep going,’” Verma said. “We knew if we addressed this problem, the rover could travel much farther every day.”
After each drive comes to a halt, the rover sends a 360-degree panorama to Earth, where mapping experts match the imagery with shots from NASA’s Mars Reconnaissance Orbiter (MRO). The team then sends the rover its location and instructions for its next drive. That process can take a day or more, but with Mars Global Localization, the rover is able to compare the images itself, determine its location, and roll ahead on its preplanned route.
“We’ve given the rover a new ability,” said Jeremy Nash, a JPL robotics engineer who led the team working on the project under Verma. “This has been an open problem in robotics research for decades, and it’s been super exciting to deploy this solution in space for the first time.”
The small team began working in 2023, testing the accuracy of the algorithm they’d developed using data from 264 previous rover stops. The algorithm compared rover panoramic photos to MRO imagery and correctly pinpointed the rover’s location for every single stop.
How Ingenuity helped
Key to Mars Global Localization is the rover’s Helicopter Base Station (HBS), which Perseverance used to communicate with the now-retired Ingenuity Mars Helicopter. Equipped with a commercial processor that powered many consumer smartphones in the mid-2010s, the HBS runs more than 100 times faster than the rover’s two main computers, which, built to survive the radiation-heavy Martian environment, are based on hardware introduced in 1997.
As a technology demonstration designed to test capabilities, the Ingenuity mission was able to risk employing more powerful commercial chips in the HBS and the helicopter even though they hadn’t been proven in space. It paid off: Expected to fly no more than five times, the rotorcraft completed 72 flights.
The power of the HBS processor inspired Verma to look for ways the Perseverance mission might harness it. “It’s almost like a gift. Ingenuity blazed the trail, proving we could use commercial processors on Mars,” Verma said.
Tapping into the HBS computer has had its challenges. To address reliability, the team developed a “sanity check”: The algorithm runs on the HBS multiple times before one of the rover’s main computers checks to ensure the results match. During testing, the team repeatedly found the rover’s position was off by 1 millimeter. They discovered damage to about 25 bits — a minuscule fraction of the processor’s 1 gigabyte of memory — and developed a solution to isolate those bits while the algorithm runs.
Alongside the broader Mars Global Localization process, the team’s sanity check and memory solutions are expected to find new uses as faster commercial processors are employed in future missions. In the meantime, the team has already turned their sights to the Moon, where difficult lighting conditions and long, cold lunar nights make knowing exactly where spacecraft are located all the more critical.
More about Perseverance
NASA’s Jet Propulsion Laboratory, which is managed for the agency by Caltech, built and manages operations of the Perseverance rover on behalf of NASA’s Science Mission Directorate in Washington, as part of NASA’s Mars Exploration Program portfolio. Learn more about Perseverance.
Seekr has launched the beta testing of SeekrGeo, a geospatial reasoning engine. SeekrGeo provides advanced geospatial intelligence to enterprises and government agencies, accelerating actionable insights with launch partner Wyvern to deliver hyperspectral imaging capabilities.
Wyvern, a hyperspectral imaging and Earth observation data company, provides a comprehensive licensing agreement as Seekr’s inaugural data partner. The alliance accelerates enterprise access to scalable, high-resolution hyperspectral imaging powered by AI-driven analysis that can reason, detect changes over time, and identify meaningful patterns in activity for both national security and commercial use cases including wildland fire management, supply chain intelligence, and countless other actionable VLM-based insights.
As geospatial intelligence (GEOINT) grows to a projected $63B market by 2030, the gap between data availability and usable intelligence continues to widen. Bringing together Wyvern data and Seekr technology fills the gap in the market, giving enterprises and government customers a way to both access multimodal hyperspectral data, and synthesize intelligence and actionable insights with SeekrGeo’s Remote Sensing Foundation Model built for multimodal understanding, contextual reasoning, and autonomous analysis.
“Our first SeekrGeo customers required the use of Hyperspectral imaging to solve the most complex recognition problems. We recognized Wyvern for their best-in-class Hyperspectral LEO constellation and are very pleased to be working with them,” said Rob Clark, Seekr president.
“The biggest barrier to hyperspectral adoption has never been the data, it’s been the difficulty of turning that data into applications,” said Chris Robson, Co-Founder and CEO of Wyvern. “Seekr’s geospatial foundation model changes the equation entirely. Instead of needing months of specialized development work, our customers will be able to build new applications in a fraction of the time at scale.”
ArkEdge Space Inc. has formed a consortium with General Incorporated Association Cross U, Axelspace Corporation, and Double Feather Partners to promote co-creation in the African space market. The four organizations entered into a memorandum of understanding (MoU) on Feb. 18 to establish a framework for collaboration.
ArkEdge Space is a Tokyo-based space start-up delivering micro-satellite constellations from design to operations.
The consortium seeks to move beyond conventional official development assistance frameworks by directly connecting Japan’s advanced space technologies with the private-sector dynamism of African nations. It will embed Japanese digital infrastructure, including satellite systems, data platforms, and space-enabled services, into Africa’s social and economic foundations.
Through this approach, the initiative aims to operationalize within the space domain the principles of Japan’s “Free and Open Indo-Pacific” vision, originally advocated by the Japanese government in 2016 under then-Prime Minister Shinzo Abe.
Sustainable co-creation model Across Africa, countries face urgent challenges, including climate change-driven droughts and floods, food security risks, and growing infrastructure demands from rapid urbanization. Satellite data and space-based technologies offer concrete tools to address these issues; however, limited local infrastructure, institutional readiness, and operational know-how continue to constrain practical implementation.
Through the Cross U Africa Initiative Working Group established in November 2025, the four organizations collaborated with more than 20 Japanese partners across industry, academia and government to explore concrete models for co-creation with African nations.
In January, the parties established the consortium to move beyond the cooperation phase and enter an implementation phase, driving concrete, private-sector-led business across the continent, following participation in the Ministry of Foreign Affairs of Japan’s Public and Private Joint Mission for Promoting Trade and Investment in Africa.
The consortium seeks to bring to life, within the space industry, the principle of “co-creation of innovative solutions” set forth in the Yokohama Declaration adopted at TICAD 9. Rather than simply transferring technology, it aims to build genuine partnerships with African business counterparts and cultivate a space industry ecosystem that drives economic growth for both Japan and African nations.
Co-creation in Ethiopia using satellite data A pilot project was launched in Ethiopia in Ethiopia in January when Axelspace and Ethiopian technology company Jethi Software Development PLC signed a MoU to collaborate on the use of satellite data to address pressing social challenges. Ethiopia will serve as a reference model for future expansion across the continent.
By integrating Axelspace’s expertise in high-frequency satellite data analytics with Jethi’s local network and software development capabilities, the partners will develop solutions targeting Ethiopia’s most pressing priorities, including agricultural productivity, forest conservation, and urban planning optimization.
The project aims to establish a sustainable business model in which local enterprises independently operate and monetize satellite-enabled services. Through this model, Japanese space technologies can be embedded into Ethiopia’s social and economic infrastructure, enabling both sustained business growth and measurable social impact.
Outlook In April, consortium members will return to Africa to engage in discussions with local public institutions aimed at forming additional implementable projects and advancing new co-creation models.
As a key year for translating TICAD 9 commitments into tangible action, the consortium will present progress updates at Nihobashi Space Week 2026 in November, one of Asia’s largest space business events.
The consortium will continue expanding partnerships across African nations, with the goal of embedding space-based technologies into local economies and fostering industries that endure beyond any single project or funding cycle.
Topcon Positioning Systems has signed a commercial agreement with Xona to secure early-adopter access to Pulsar, Xona’s low Earth orbit (LEO) satellite navigation constellation. This agreement positions Topcon among Xona’s first commercial customers preparing to integrate Pulsar into future high-precision positioning workflows.
“The letter of agreement reinforces Topcon’s long-standing commitment to innovation and customer-driven technology leadership,” said Ron Oberlander, head of the Topcon Geomatics Platform. “It lays the groundwork for a new era of high-precision performance possibilities as LEO satellites come online. By proactively adopting next-generation navigation infrastructure, we strengthen our commitment to provide reliable, resilient, and future-proof solutions for our customers.”
“Topcon understands where accuracy, continuity and confidence matter most for operators in the field,” said Bryan Chan, co-founder and VP of Strategy at Xona. “By adding a modern navigation layer into Topcon’s offerings, Pulsar will strengthen signal performance and resiliency in even the most challenging environments, ensuring Topcon customers can operate with greater confidence wherever their work takes them.”
UAVOS has completed successful flight testing of its optoelectronic, gyro‑stabilized payload onboard device (POD), integrated into the HAPS ApusNeo 18. The ApusNeo 18 is a solar‑powered high‑altitude pseudo‑satellite developed as part of a joint project with Mira Aerospace.
Using steerable high-resolution cameras, the system demonstrated coverage of 472 km of electro‑optical imagery with a ground sampling distance of 69 cm per pixel, as well as infrared imagery at 480 cm per pixel, from an altitude of 15,000 m. The camera’s footprint covered 53.9 km², while its steerability allowed access to any point within a 54.5 x 12.3 km area at any time.
Designed specifically for stratospheric operations, the POD significantly enhances the intelligence, surveillance and reconnaissance capabilities of HAPS platforms.
The POD weighs 3.6 kg and features a compact form factor measuring 845 mm (length) × 128 mm (width) × 142 mm (height). It is equipped with an onboard computer for data processing and a UAVOS radio modem with a 10 W amplifier, enabling high‑throughput data transmission to the ground control station.
To ensure reliable high-altitude performance, the POD incorporates an integrated heating and cooling system that maintains optimal operating conditions for onboard sensors. It also includes a foldable, servo‑driven antenna that can be stowed in a safe position when required.
Additionally, the mechanical design enables video and photo acquisition with roll stabilization of up to ±50 degrees, expanding operational flexibility and imaging performance.
“The Payload Onboard Device (POD) has already been successfully tested for wildfire monitoring in Spain. When integrated with the HAPS ApusNeo 18, which is capable of surveying hundreds of kilometres in a single flight, the system delivers a comprehensive situational picture, improving operational efficiency, reducing costs, and increasing overall mission effectiveness,” said Aliaksei Stratsilatau, founder and CEO of UAVOS.
JAVAD GNSS has announced the TR-2S LEO, a compact GNSS OEM board designed and manufactured at the company’s headquarters in San Jose, California. The TR-2S LEO delivers high-precision GNSS positioning for low Earth Orbit (LEO) missions.
Developed for customers requiring high-integrity navigation performance under the demanding conditions of space, the TR-2S LEO integrates radiation-tolerant, space-hardened electronics with patented spoofing and jamming detection to support, secure and protect continuous GNSS operation. The board tracks 874 channels across all major GNSS constellations, enabling robust and real-time position, velocity, time and measurements (PVT) with multi-frequency resilience.
JAVAD GNSS brings more than two decades of flight heritage, with OEM boards deployed on most commercial launch vehicles worldwide, including the Vega program of the European Space Agency (ESA). The company continues to build upon its experience, now with focused concentration on LEO-based applications with technologies like the TR-2S LEO and the SpaceAnt-G3T OEM GNSS antenna. The SpaceAnt-G3T features a stable phase center and is usable for single-, dual- and triple-frequency applications.
“The TR-2S LEO reflects our commitment to delivering mission-critical GNSS solutions engineered and manufactured entirely in the United States,” said Tom Hunter, senior vice president, Aerospace and Defense Solutions at JAVAD GNSS. “As commercial space operations expand, our customers need a navigation platform they can trust — one built on proven flight heritage, radiation-hardened design, and the technical support to see their missions succeed. That’s what we deliver.”
The TR-2S LEO is adaptable to a wide range of commercial launch vehicles, spacecraft and high-dynamic applications.