The European GNSS Agency (GSA) is inviting European industries and Member State Competent Public Regulated Service (PRS) Authorities to share their views and ideas on which technologies at user segment level are important to support the adoption of the PRS. In particular, industries with potential interests and capabilities to support the development of Galileo PRS user segment technologies such as receivers, security modules, and dedicated infrastructure are encouraged to join the discussion.
PRS signals will be restricted to authorized users by governments for sensitive applications that require a high level of continuity. The PRS uses robust signals that are encrypted and resistant to jamming.
The GSA’s objective is to ensure that PRS service is affordable and secure for all interested users while also ensuring that European industry maintains its competitive edge in the global satellite navigation marketplace.
The GSA has already conducted several studies and projects aimed at identifying, developing and sustaining the necessary technology to support PRS market uptake. Additional initiatives are expected to be launched within the Horizon 2020 Framework Programme and in other programme initiatives in late 2014 and 2015.
Based on openly available information, the GSA has drafted a roadmap for developing and identifying the necessary secure technologies. This roadmap will be augmented by information gathered during the current consultations. It is expected that industry will provide additional inputs and ideas that may be
explored in the frame of Horizon 2020 and other initiatives. The GSA will use this information in planning long-term activities in support of PRS adoption, with a focus on technology preparation for a more effective market uptake.
Consultations will focus on the following topics:
Necessary steps for transforming the identified technologies into products competitive enough in terms of cost, power, dimension etc. to support the market uptake of PRS within the 2018-2020 timeframe.
Collection of information on the current European capability and capacity with the manufacturing sectors, with particular attention to nanotechnology manufacturing capabilities, and ideas of how to better use it for PRS market uptake.
Ideas of how to build, starting from the most promising technologies, the manufacturing lines capable of serving the PRS user segment need.
Main domains, elements and interfaces that will benefit from standardization, allowing for a stronger market adoption of PRS.
The deadline to receive requests is February 28. All consultations will be organized between February and April 2014. For more information and to arrange a one-on-one meeting, send an email to: [email protected].
Galileo PRS is restricted to governmental authorized users. It is intended for use with sensitive applications that require a high-level of service continuity. Authorized users include Member States, European Council, European Commission, EEAS, EU agencies and, subject to security agreements with the EU, third countries and international organizations.
The implementation changes and first live tests of BeiDou and Galileo on Teseo-3 GNSS chips developed in 2013 are covered, bringing it to a four-constellation machine. By 2020, we expect to have four global constellations all on the same band, giving us more than 100 satellites — under clear sky, as many as 30 or 40 simultaneously.
By Philip G. Mattos and Fabio Pisoni
Multi-constellation GNSS first became widely available in 2010/2011, but only as two constellations, GPS+GLONASS. Although receivers at that time may have supported Galileo, there were no usable satellites. BeiDou was a name only, as without a spec (an interface control document, or ICD), no receivers could be built. However, the hardware development time of receivers had been effectively shortened: the Galileo ICD had been available for years, BeiDou codes had been reverse-engineered by Grace Gao and colleagues at Stanford, and at the end of 2011 they were confirmed by the so-called test ICD, which allowed signal testing without yet releasing message characteristics or content.
The last weeks of 2012 saw two great leaps forward for GNSS. Galileo IOV3 and 4 started transmitting at the beginning of December, bringing the constellation to four and making positioning possible for about two hours a day. At the end of December, the Chinese issued the BeiDou ICD, allowing the final steps of message decode and ephemeris calculation to be added to systems that had been tracking BeiDou for many months, and thus supporting positioning. The Teseo-2 receiver from STMicroelectronics has been available for some years, so apart from software development, it was just waiting for Galileo satellites; however, for BeiDou it needed hardware support in the form of an additional RF front end. Additionally, while it could support all four constellations, it could not support BeiDou and GPS/Galileo at the same time, as without the BeiDou ICD the spreading codes had to be software-generated and used from a memory-based code generator, thus blocking the GPS/Galileo part of the machine.
The Teseo-3 receiver appeared late in 2013, returning to the optimum single-chip form factor: RF integrated with digital silicon and flash memory in the same package, enabling simultaneous use of BeiDou and GPS/Galileo signals. Multi-constellation in 2012 was GPS+GLONASS, which brought huge benefits in urban canyons with up to 20 visible satellites in an open sky. Now, for two hours a day in Europe while the Galileo IOVs are visible, we can run three constellations, and in the China region, GPS/BeiDou/Galileo is the preferred choice.
This article covers the first tracking of four Galileo satellites on December 4, 2012, first positioning with Galileo, and first positioning with BeiDou in January 2013. It will cover static and road tests of each constellation individually and together as a single positioning solution. Road tests in the United States/Europe will combine GPS/GLONASS/Galileo, while tests in the China region will combine GPS/Galileo/BeiDou. Results will be discussed from a technical point of view, while the market future of multi-constellation hardware will also be considered.
In the 2010–2020 timeframe, GLONASS and BeiDou (1602 MHz FDMA and 1561 MHz respectively) cost extra silicon in both RF and digital hardware, and cause marginal extra jamming vulnerability due to the 50 MHz bandwidth of the front end. The extra silicon also causes extra power consumption.
After 2020, GLONASS is expected to have the L1OC signal operational, CDMA on the GPS/Galileo frequency, and BeiDou is expected both to have expanded worldwide, and also to have the B3 signal fully operational, again on 1575 MHz. At that point we will have four global constellations all on the same band, giving us more than 100 satellites. With a clear sky, the user might expect to see more than 30, sometimes 40, satellites simultaneously.
Besides the performance benefits in terms of urban canyon availability and accuracy, this allows the receiver to be greatly simplified. While code generators will require great flexibility to generate any of the code families at will, the actual signal path will be greatly simplified: just one path in both RF (analog) and baseband (digital) processing, including all the notch filters, derotation, and so on. And this will greatly reduce the power consumption.
Will the market want to take the benefit in power consumption and silicon area, or will it prefer to reuse those resources by becoming dual-frequency, adding also the lower-L-band signals, initially L5/E5, but possibly also L2/L3/L6 ? The current view is that the consumer receiver will go no further than L5/E5, but that the hooks will be built-in to allow the same silicon to be used in professional receivers also, or in L2C implementations to take advantage of the earlier availability of a full constellation of GPS-L2C rather than GPS-L5.
This article presents both technical results of field trials of the quad-constellation receiver, and also the forward looking view of how receivers will grow through multi-frequency and shrink through the growing signal commonalities over this decade.
History
Galileo was put into the ST GPS/GNSS receiver hardware from 2006 to 2008, with a new RF and an FPGA-based baseband under the EU-funded GR-PosTer project. While a production baseband (Cartesio-plus) followed in high volume from 2009, in real life it was still plain GPS due to the absence of Galileo satellites.
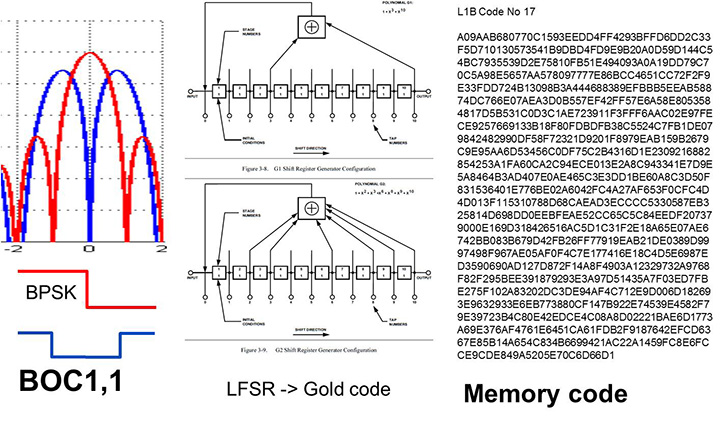
The changed characteristics in Galileo that drove hardware upgrades are shown in Figure 1. The binary offset carrier BOC(1,1) modulation stretches the bandwidth, affecting the RF, while both the BOC and the memory codes affect the baseband silicon in the code-generator area.
Figure 1. Changes for Galileo.
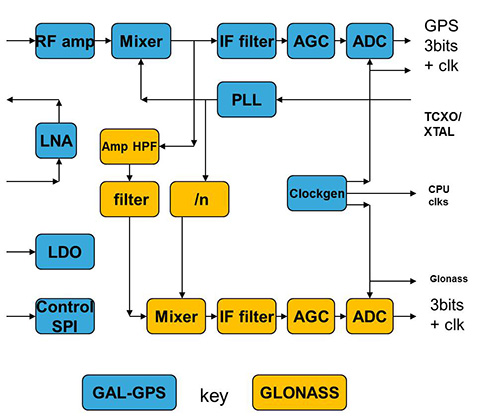
Next was the return to strength of the GLONASS constellation, meaning receivers were actually needed before Galileo. However the different center frequency (1602 MHz), and the multi-channel nature of the FDMA meant more major changes to the hardware. As shown in Figure 2 in orange, a second mixer was added, with second IF path and A/D converter.
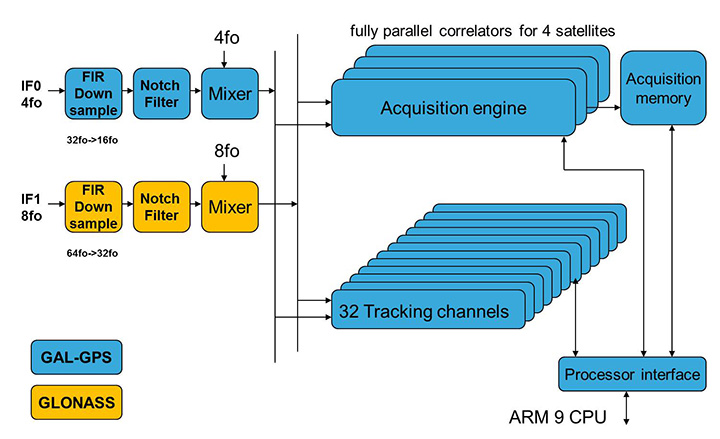
Figure 2. Teseo-2 RF hardware changes for GLONASS.Figure 3. Teseo-2 and Teseo-3 baseband changes for GLONASS.
The baseband changes added a second pre-processing chain and configured all the acquisition channels and tracking channels to flexibly select either input chain. Less visible, the code-generators were modified to support 511 chip codes and 511kchips/sec rates.
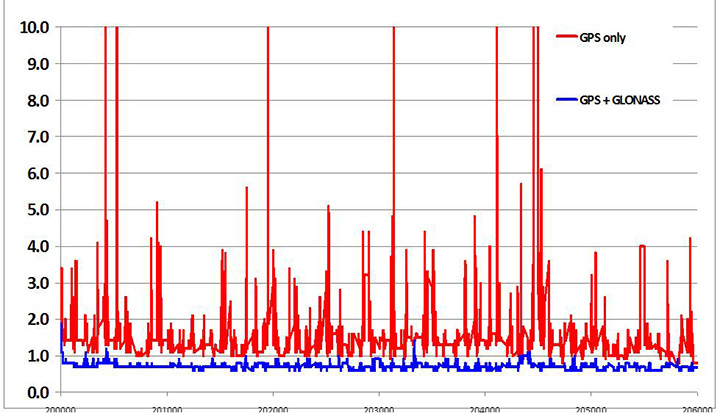
Teseo-2 appeared with GPS/GLONASS support in 2010, and demonstrated the benefit of GNSS in urban canyons, as shown by the dilution of precision (DOP) plot for central London in Figure 4. The GPS-only receiver (in red) has frequent DOP excursions beyond limits, resulting either in bad accuracy or even interrupted fix availability. In contrast, the GNSS version (in blue) has a DOP generally below 1, with a single maximum of 1.4, and thus 100 percent availability. Tracking 16 satellites, even if many are via non-line-of-sight (NLOS) reflected paths, allows sophisticated elimination of distorted measurements but still continuous, and hence accurate, positioning.
Figure 4. DOP/accuracy benefits of GNSS.
BeiDou
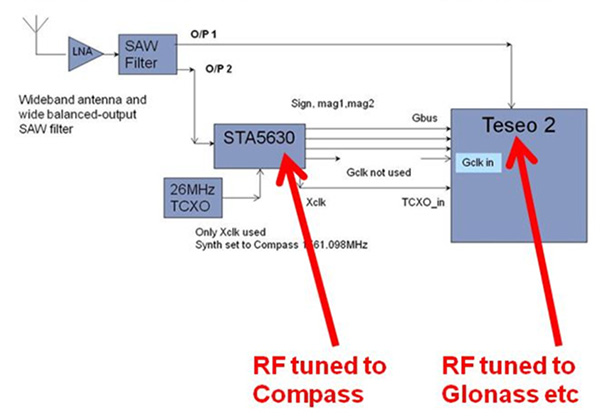
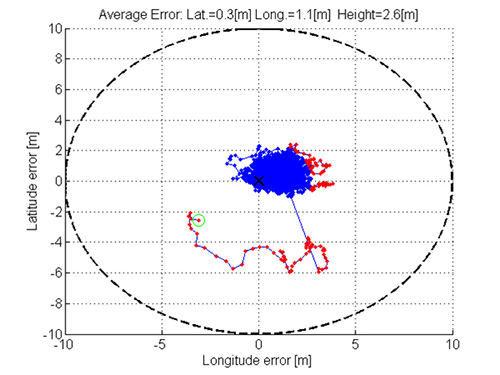
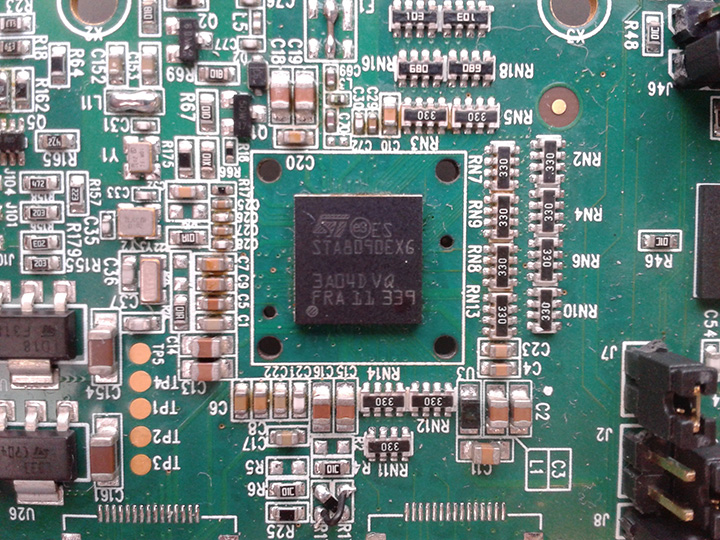
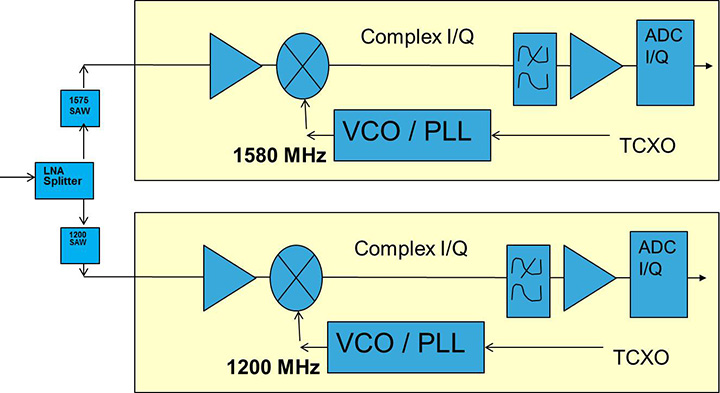
Like Galileo, BeiDou is a story of chapters. Chapter 1 was no ICD, and running on a demo dual-RF architecture as per the schematic shown in Figure 5. Chapter 2 was the same hardware with the test ICD, so all satellites, but still no positioning. Chapter 3 was the full ICD giving positioning in January 2013 (Figure 6), then running on the real Teseo-3 silicon in September 2013, shown in Figure 7.
Figure 5. Demo Teseo-2 dual RF implementation of BeiDou.Figure 6. Beidou positioning results.Figure 7. Teseo 3 development board.
The Teseo-3 has an on-chip RF section capable of GPS, Galileo, GLONASS and BeiDou, so no external RF is needed.
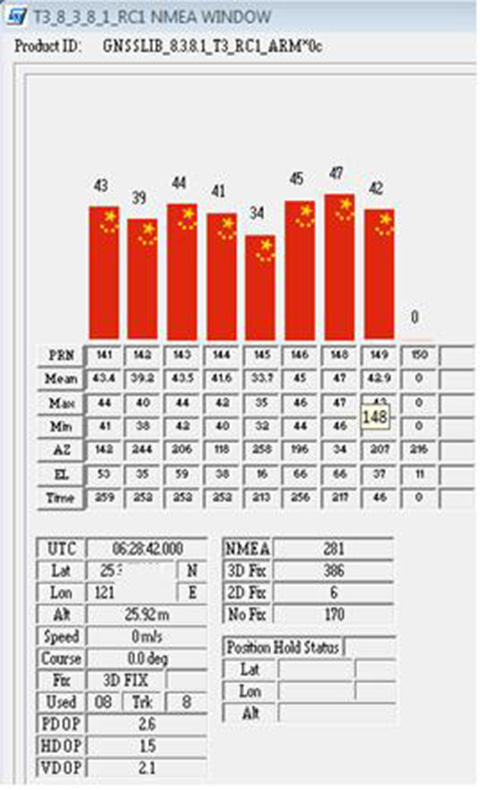
The clear green space around the Teseo-3 chip in the photo and the four mounting holes are for the bolt-down socket used to hold chips during testing, while the chip shown is soldered directly to the board. Figure 8A shows the development board tracking eight BeiDou satellites visible from Taiwan.
However, the silicon is not designed to be single-constellation; it is designed to use all the satellites in the sky. Figure 8b shows another test using GPS and BeiDou satellites simultaneously.
Figure 8A. Beidou.Figure 8b. GPS+Beidou.
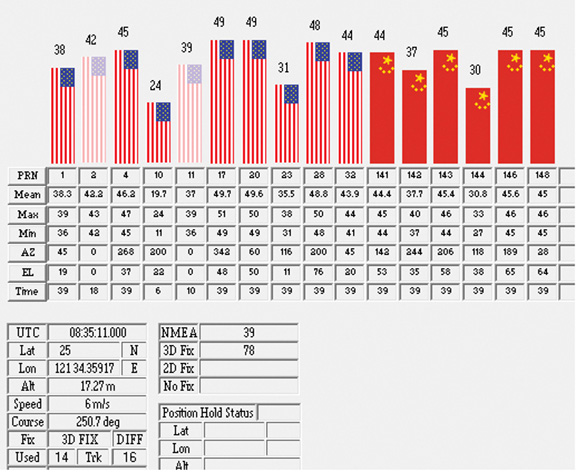
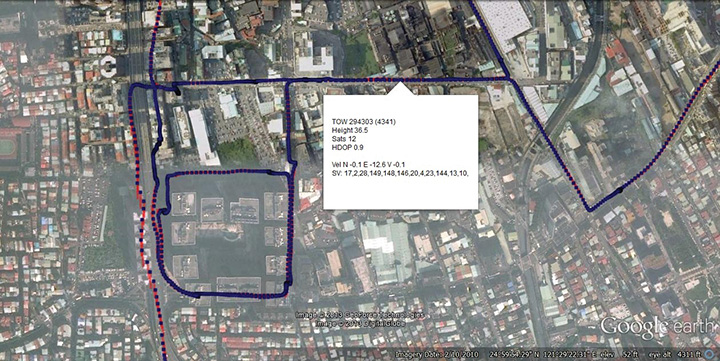
A mobile demo on the Teseo-3 model is shown running GPS plus BeiDou in Figure 9, a road test in Taipei. Satellites (SV) up to 32 are GPS, those over 140 are BeiDou, in the status window shown: total 13 satellites in a high-rise city area, though many are non-LOS.
Figure 9. GPS + Beidou roadtrack in Taipei.
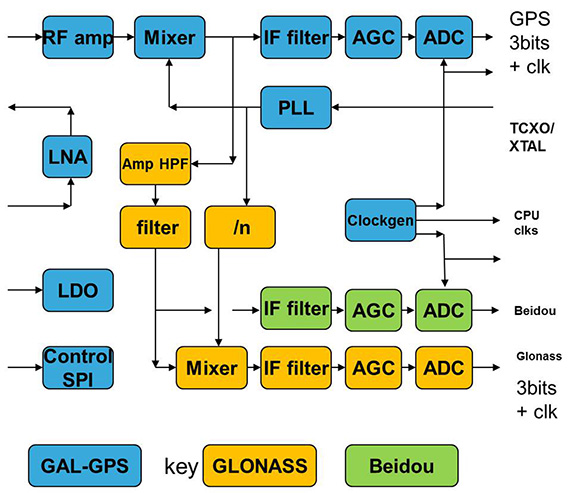
Extending the hardware to add BeiDou, which is on 1561 MHz and thus a third center frequency, meant adding another path through the IF stages of the on-chip radio. After the first mixer, GPS is at 4 MHz, and GLONASS at about 30 MHz, but BeiDou is at minus 10 MHz. While the IF strip in general is real, rather than complex (IQ), the output of the mixer and input to the first filter stage is complex, and thus can discriminate between positive frequencies (from the upper sideband) and negative ones (from the lower sideband), and this is normally used to give good image rejection. In the case of BeiDou, the filter input is modified to take the lower sideband, that is, negative frequencies, and a second mixer is not required; the IF filter is tuned to 10 MHz. The new blocks for BeiDou are shown in green in Figure 10. The baseband has no new blocks, but the code generator has been modified to generate the BeiDou codes (and, in fact, made flexible to generate many other code types and lengths). Two forms of Teseo-3 baseband are envisaged, the first being for low-cost, low-current continues to have two input paths, so must choose between GLONASS and BeiDou as required. A future high-end model may have an extra input processing path to allow use of BeiDou and GLONASS simultaneously.
Figure 10. Teseo-3 RF changes for Beidou shown in green.
Galileo Again
Maintaining the chronological sequence, Galileo gets a second chapter in three steps. In December 2012, it was possible for the first time to track four IOV satellites simultaneously, though not to position due to the absence of valid orbit data. In March 2012, it was possible for the first time to demonstrate live positioning, and this was done using Teseo-2 simultaneously by ESA at ESTEC and STMicro in Naples and Milan, our software development centres.
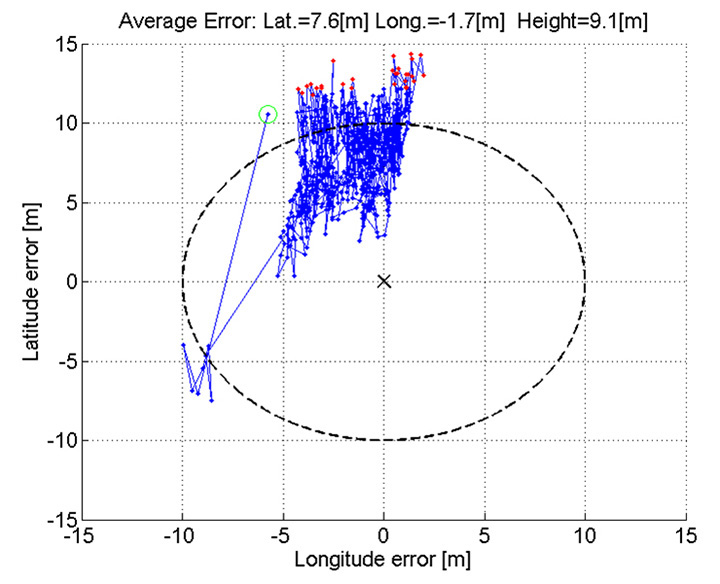
The demos were repeated in public for the press on July 24, 2013, at Fucino, Italy’s satellite earth station, with ESA/EC using the test user receiver (TUR) from Septentrio, and ST running simultaneous tests at its Italian labs. Figure 11 and Figure 12 show the position results for the data and pilot channels respectively, with independent LMS fixes. In real life, the fixes would be from a Kalman filter, and would be from a combined E1-B/E1-C channel, to take advantage of the better tracking on the pilot.
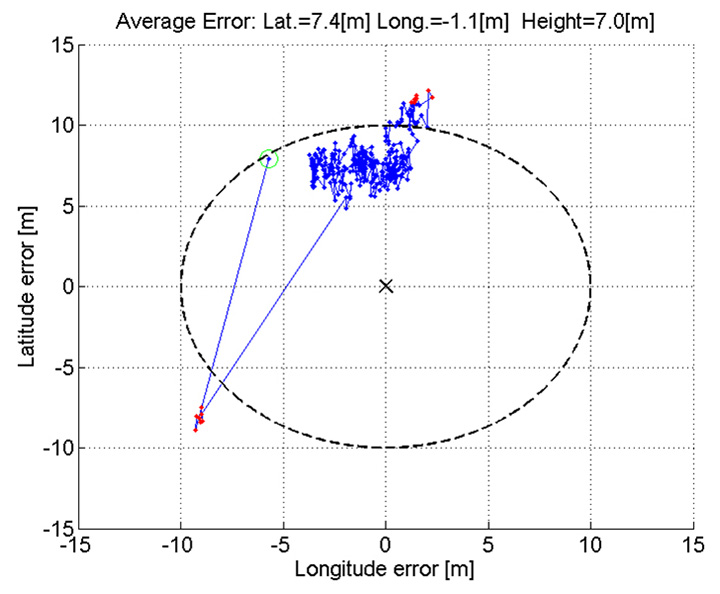
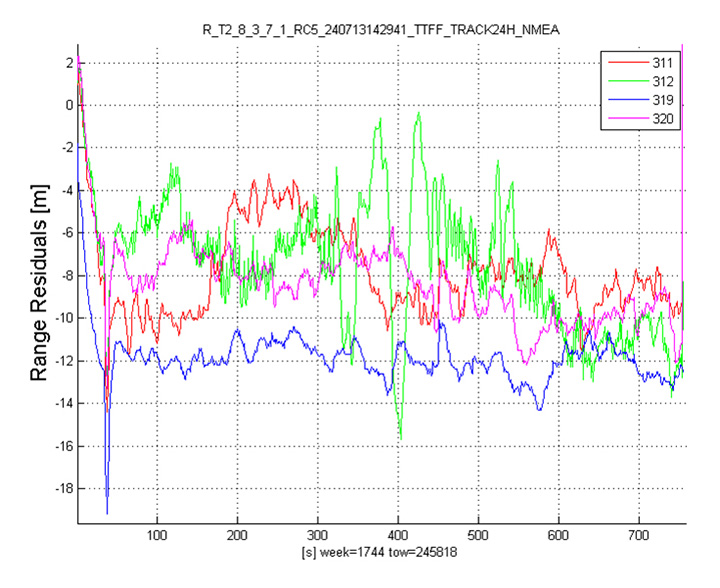
Good accuracy is not expected from Galileo at this stage. The four satellites, while orbited to give good common visibility, do not also give a good DOP; the full set of ground monitoring stations is not yet implemented and cannot be well calibrated with such a small constellation. Finally, the ionospheric correction data is not yet available. Despite these problems, the residuals on the solutions, against a known fixed position for the rooftop antenna, are very respectable, shown in Figure 13.
Figure 13. Galileo residuals, L1-B.
The common mode value is unimportant, representing only an offset in the receiver clock, and 10 meters is about 30 nanoseconds. The accuracy indicator is the spread between satellites, which is very respectable for a code-only receiver without full iono correction, especially around 640 on the TOW scale, where it is less than 2 meters. The rapid and major variation on the green data around t=400 is considered to be multipath, as the roof antenna is not ideally positioned with respect to other machinery and equipment also installed on the roof.
QZSS and GPS-III/L1C
Teseo-2 has supported the legacy (C/A code) signal on QZSS for some time, but Teseo-3 has been upgraded to handle the GPS-III/L1-C signal, waiting for modernized GPS. This signal is already available on the QZSS satellite, allowing tests with real signals. Significant changes were required in the baseband hardware, as the spreading code is a Weill code, whose generation complexity is such that it is generated once when the satellite is selected, then replayed real time from memory. Additionally it is long, in two domains. It is 10230 chips — that is, long to store but also long in time, with a 10-millisecond epoch. On Teseo-3, the legacy C/A code is used to determine code-phase and frequency before handing over to the Weill code for tracking.
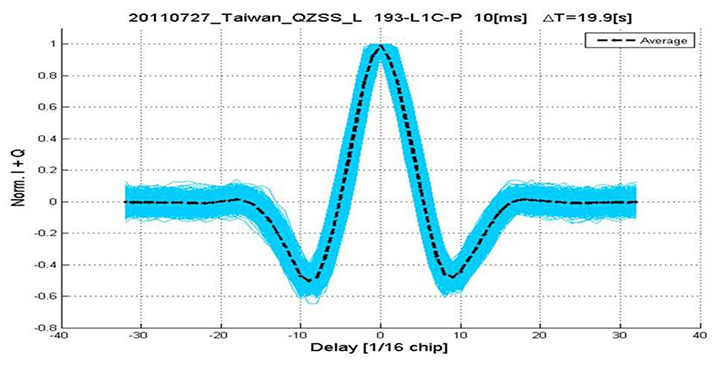
Using a long-range crystal ball and looking far into the future, a model of the future Teseo-4 DSP hardware is available, with 64 correlation taps per satellite. Running this on the captured QZSS L1-C signal gives the correlation response shown in Figure 14. Having multiple taps removes all ambiguity from the BOC signal, simultaneously removing data transitions, which can alternatively be pre-stripped using the known pilot secondary code (which on GPS III is 5 dB stronger than the data signal). The resultant plot represents 2,000 epochs, each of 10 milliseconds, plotted in blue, with integrated result for the full 20 seconds shown in the black dashed line. Assuming vehicle dynamics is taken out using carrier Doppler, this allows extremely precise measurement of the code phase, or analysis of any multipath in order to remove it. This RF data was captured on a benign site with a static antenna, so it shows little distortion.
Figure 14. L1-C tracking on QZSS satellite.Figure 15. Dual RF implementation of dual-band front end.
The Future
Having already built in extreme flexibility to the code generators to support all known signals and generalized likely future ones, the main step for the future is to support multiple frequencies, starting with adding L5 and/or L2, but as before, ensuring that enough flexibility is built in to allow any rational user/customer choice. It is not viable for us to make silicon for low-volume combinations, nor to divide the overall market over different chips. Thus our mainstream chip must also support the lower volume options.
We cannot, however, impose silicon area or power consumption penalties on the high-volume customer, or he will not buy our product.
Thus, our solution to multi-frequency is to make an RF that can support either band switchably, with the high band integrated on the volume single-chip GNSS. Customers who also need the low band can then add a second RF of identical design externally, connected to the expansion port on the baseband, which has always existed for diagnostic purposes, and was how BeiDou was demonstrated on T2. By being an RF of identical design to the internal one, it incurs no extra design effort, and would probably be produced anyway as a test chip during the development of the integrated single-chip version. Without this approach, the low volume of sales of a dual-band radio, or a low-band radio, would never repay its development costs.
Conclusions
All four constellations have been demonstrated with live satellite signals on Teseo-2, a high-volume production chip for several years, and on Teseo-3 including use in combinations as a single multi-constellation positioning solution. With the advent of Teseo-3, with optimized BeiDou processing and hardware support for GPS-3/L1C, a long-term single-chip solution is offered.
For the future, dual-frequency solutions are in the pipeline, allowing full advantage of carrier phase, and research into moving precise point positioning and real-time kinematic into the automotive market for fields such as advanced driver-assistance systems.
Acknowledgments
Teseo III design and development is supported by the European Commission HIMALAYA FP-7 project.
This article is based on a technical paper first presented at ION-GNSS+ 2013 in Nashville, Tennessee.
ST GPS products, chipsets and software, baseband and RF are developed by a distributed team in: Bristol, UK (system R&D, software R&D; Milan, Italy (Silicon implementation, algorithm modelling and verification); Naples, Italy (software implementation and validation); Catania, Sicily, Italy (Galileo software, RF design and production); Noida, India (verification and FPGA). The contribution of all these teams is gratefully acknowledged.
Philip G. Mattos received an external Ph.D. on his GPS work from Bristol University. Since 1989 he has worked exclusively on GNSS implementations, RF, baseband and applications. He is consulting on the next-generation GNSS chips, including one-chip GPS (RF+digital), and high-sensitivity GPS and Galileo for indoor applications, and combined GPS/Galileo/GLONASS chipsets. In 2008-2009, he re-implemented LORAN on the GPS CPU, and in 2009-2010 led the GLONASS implementation team. He is leading the team on L1C and BeiDou implementation, and the creation of totally generic hardware that can handle even future unknown systems.
Fabio Pisoni has been with the GNSS System Team at STMicroelectronics since 2009. He received a master’s degree in electronics from Politecnico di Milano, Italy, in 1994. He was previously with the GNSS DSP and System Team in Nemerix SA and has earlier working experience in communications (multi-carrier receivers).
Artist’s concept of a GPS III satellite in orbit, courtesy of Lockheed Martin.
Air Force Orders GPS III Satellites 05 and 06 from Lockheed Martin
A December 12 contract modification provided Air Force funding to Lockheed Martin to complete the fifth and sixth GPS III space vehicles (SV 05-06). Lockheeed originally received funding to procure long-lead parts for satellites five through eight (SV 05-08) in February 2013.
The $200,700,415 cost-plus-incentive-fee modification (P00276) on an existing contract (FA8807-08-C-0010) for GPS III space vehicles 05 and 06 means that work will be performed at Littleton. Colorado and Clifton, New Jersey, and is expected to be completed by Dec. 14, 2017 for space vehicle 05 and June 14, 2018 for space vehicle 06. The Air Force Space and Missile Systems Center Contracting Directorate, Los Angeles Air Force Base, California, is the contracting activity.
Galileo Achieves First Airborne Tracking
The European Space Agency’s Galileo satellites have achieved their first aerial fix of longitude, latitude, and altitude, enabling the inflight tracking of a test aircraft.
ESA’s four Galileo satellites in orbit have supported months of positioning tests on the ground across Europe since the first fix in March. Now the first aerial tracking using Galileo has taken place, determining the position of an aircraft using only its own independent navigation system.
The milestone took place on a Fairchild Metro-II above Gilze-Rijen Air Force Base in the Netherlands on November 12. It was part of an aerial campaign overseen jointly by ESA and the National Aerospace Laboratory of the Netherlands, NLR, with the support of Eurocontrol, the European Organisation for the Safety of Air Navigation, and LVNL, the Dutch Air Navigation Service Provider.
A pair of Galileo test receivers was used aboard the aircraft, the same kind employed for Galileo testing in the field and in labs across Europe. They were connected to an aeronautical-certified triple-frequency Galileo-ready antenna mounted on top of the aircraft.
Tests were scheduled during periods when all four Galileo satellites were visible in the sky. The receivers fixed the plane’s position, as well as determining key variables such as the position, velocity, and timing accuracy; time to first fix; signal-to-noise ratio; range error; and range–rate error.
Testing covered both Galileo’s publicly available Open Service and the more precise, encrypted Public Regulated Service, whose availability is limited to governmental entities.
Flights covered all major phases: take off, straight and level flight with constant speed, orbit, straight and level flight with alternating speeds, turns with a maximum bank angle of 60 degrees, pull-ups and push-overs, approaches and landings.
The flights also allowed positioning to be carried out during a wide variety of conditions, such as vibrations, speeds up to 456 km/h, accelerations up to 2 ghorizontal and 0.5–1.5 gvertical, and rapid jerks. The maximum altitude reached during the flights was 3,000 meters.
GPS III Prototype Proves Constellation Compatibility
The Lockheed Martin prototype of the next-generation GPS satellite, the GPS III, has proven that it is backwardly compatible with the existing GPS satellite constellation in orbit.
During tests concluded on October 17, Lockheed Martin’s GPS III testbed successfully communicated via cross-links to Air Force simulators of the current GPS constellation in orbit. The current GPS constellation includes GPS IIR, GPS IIR-M, and GPS IIF satellites.
Testing also demonstrated the ability of an Air Force receiver to track navigation signals transmitted by the GPS III Nonflight Satellite Testbed (GNST). The GNST is a full-sized, functional satellite prototype at Cape Canaveral Air Force Station.
“These tests represent the first time when the GNST’s flight-like hardware has communicated with flight-like hardware from the rest of the GPS constellation and with a navigation receiver,” explained Paul Miller, Lockheed Martin’s director for GPS III Development. “This provides early confidence in the GPS III’s design to bring advanced capabilities to our nation, while also being backward-compatible.”
The first flight-ready GPS III satellite is expected to arrive at Cape Canaveral in 2014, for launch by the Air Force in 2015.
GPS III satellites will be the first GPS space vehicles with a new L1C civil signal designed to make it interoperable with other international global navigation satellite systems.
The GNST has helped to identify and resolve development issues prior to integration and test of the first GPS III flight space vehicle (SV 01). It has gone through the development, test, and production process for the GPS III program first, significantly reducing risk for the flight vehicles, improving production predictability, increasing mission assurance, and lowering overall program costs.
The GPS III team is led by the Global Positioning Systems Directorate at the U.S. Air Force Space and Missile Systems Center.
Lockheed Martin is the GPS III prime contractor, with teammates including ITT Exelis, General Dynamics, Infinity Systems Engineering, Honeywell, ATK, and other subcontractors.
Good News for Users and Manufacturers
The U.S. Air Force is directing transmission of continuous CNAV message-populated L2C and L5 signals starting in April 2014. The move is designed to help development of user equipment compatible with the civil signals. Full text of the CNAV memo appears below.
Galileo FOC Satellites Endure Simulated Space Tests
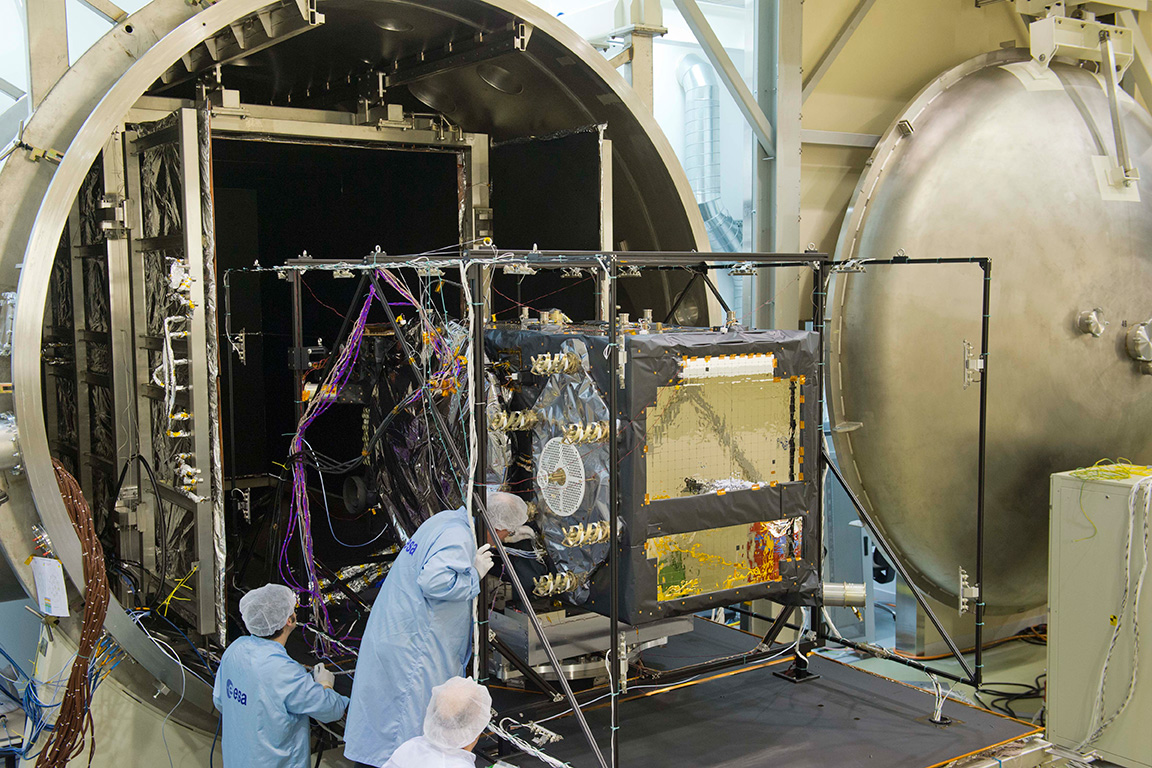
The European Space Agency’s newest Galileo satellite has emerged from five weeks of simulated space conditions. On November 29, a hatch slid open to end its thermal-vacuum test, a milestone on the way to orbit.
The satellite was placed in the 4.5-meter-diameter Phenix chamber in ESA’s ESTEC Test Centre in Noordwijk, the Netherlands, in late October. Once inside, the air was pumped out to create a space-quality vacuum. Temperature extremes were also reproduced, with the six copper walls of the thermal tent cooled by liquid nitrogen down to –180°C.
A second Galileo vehicle has been undergoing the same rigors at the site, along with a vibration and shock test to reproduce separation from the launcher. Thermal-vacuum testing on the second model will begin in early 2014. The two satellites will be launched on a Soyuz rocket from Europe’s Spaceport in French Guiana in mid-2014.
The next satellite is expected to arrive at ESTEC in March, with further satellites following every seven weeks or so. A total of 22 FOC satellites are being built by OHB in Germany, with navigation payloads being delivered from Surrey Satellite Technology Ltd. in the UK.
The first Galileo Full Operational Capability satellite emerges from the Phenix test chamber after five weeks of thermal–vacuum testing.
Prague is now the headquarters of the European GNSS Agency (GSA).
A holiday card from a colleague in Europe calls to mind GNSS’s headlong course into the future, coupled with that most backward-reflective of human preoccupations, history.
The European GNSS Agency (GSA), whence originated this card, moved from Brussels to Prague in September 2012, in a nod to the pan-European nature of the European Union (EU) generally and its GNSSs, Galileo and EGNOS, in particular. No EU agency headquarters had been sited in Eastern Europe, and it was deemed that some soon must do. Prague made a strong bid for the GSA.
A political, cultural, and economic center of central Europe under its current name since the year 908, it has a settlement history dating back to 1306 BC. Good King Wenceslaus, who looked out upon the snow round about, deep and crisp and even, and about whom we sang festively this past season, ruled from Prague around 935, subsequently rose to sainthood, and is the patron saint of Bohemia, the Czech homeland.
The GSA has a rather variegated mission: it “manages public interests related to European GNSS programmes.” This includes everything from marketing to security — in a sense, everything satnav-related that scientists and engineers do not do. Its list of tasks and responsibilities includes 12 subheads and 61 bulleted points.
Carlo des Dorides, GSA executive director, noted upon opening the new headquarters in 2012 that Prague derives from the Slavic word praga, for threshold. “I think this is appropriate for the GSA and Galileo, as it represents the beginning of a key step for both.” EC vice-president Antonio Tajani added, “Galileo is important not only for space policy and science, but for the services and jobs that it brings.”
Thus the many GSA staffers labor to wring full advantage for modern economies from the space-based radio signal generators, amid the cobblestone streets and ancient monuments of one of the best-preserved ancient European cities, a UNESCO Cultural Heritage site.
While busily plunging into the future, we cannot escape our past.
Aircraft position as obtained by Galileo-only receiver during Netherlands flight.
The European Space Agency’s Galileo satellites have achieved their first aerial fix of longitude, latitude and altitude, enabling the inflight tracking of a test aircraft. ESA’s four Galileo satellites in orbit have supported months of positioning tests on the ground across Europe since the first fix in March.
Now the first aerial tracking using Galileo has taken place, marking the first time that Europe has been able to determine the position of an aircraft using only its own independent navigation system. The milestone took place on a Fairchild Metro-II above Gilze-Rijen Air Force Base in the Netherlands at 12:38 GMT on November 12. It was part of an aerial campaign overseen jointly by ESA and the National Aerospace Laboratory of the Netherlands, NLR, with the support of Eurocontrol, the European Organisation for the Safety of Air Navigation, and LVNL, the Dutch Air Navigation Service Provider.
A pair of Galileo test receivers was used aboard the aircraft, the same kind employed for Galileo testing in the field and in labs across Europe. They were connected to an aeronautical-certified triple-frequency Galileo-ready antenna mounted on top of the aircraft.
Fairchild Metro-II aircraft used for Galileo airborne testing.
Tests were scheduled during periods when all four Galileo satellites were visible in the sky – four being the minimum needed for positioning fixes. The receivers fixed the plane’s position and, as well as determining key variables such as the position, velocity and timing accuracy; time to first fix; signal-to-noise ratio; range error; and range–rate error.
Testing covered both Galileo’s publicly available Open Service and the more precise, encrypted Public Regulated Service, whose availability is limited to governmental entities.
Flights covered all major phases: take off, straight and level flight with constant speed, orbit, straight and level flight with alternating speeds, turns with a maximum bank angle of 60º, pull-ups and push-overs, approaches and landings.
They also allowed positioning to be carried out during a wide variety of conditions, such as vibrations, speeds up to 456 km/h, accelerations up to 2 ghorizontal and 0.5–1.5 gvertical, and rapid jerks. The maximum altitude reached during the flights were 3000 m.
NLR’s Fairchild Metro-II has previously performed initial European GPS testing in the 1980s, and the first tests of the European Geostationary Navigation Overlay Service, EGNOS, which sharpens GPS accuracy and monitors its reliability over Europe for high-accuracy or even safety-of-life uses.
The definition and development of Galileo’s in-orbit validation phase were carried out by ESA and co-funded by ESA and the EU.
The Full Operational Capability phase is managed and fully funded by the European Commission. The Commission and ESA have signed a delegation agreement by which ESA acts as design and procurement agent on behalf of the Commission.
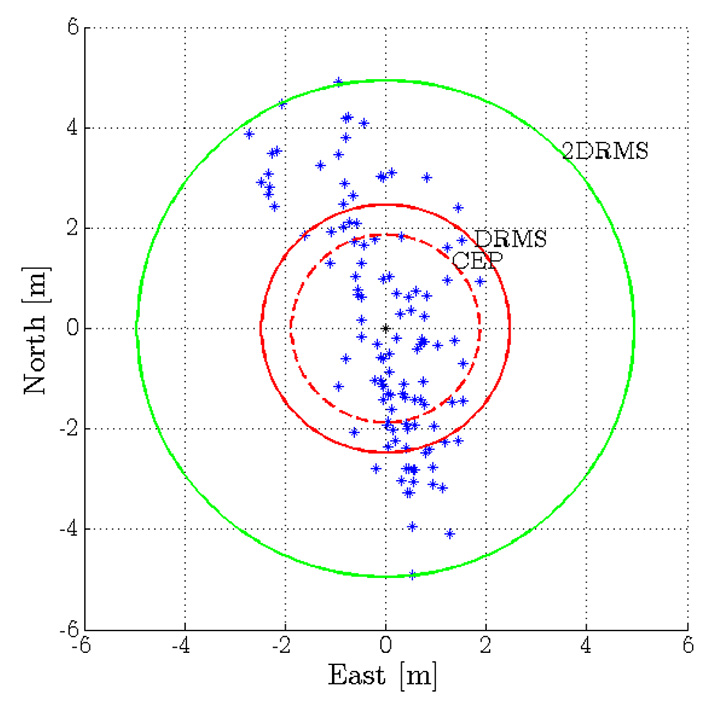
First GNSS-SDR Galileo standalone position fix using the four available satellites (Position obtained at the CTTC headquarters on 2013-Nov-10 15:52:14 UTC).
For the first time, position fixes in real time using signals from Galileo have been achieved with an open source software receiver. The milestone was achieved by a research team from the Statistical Inference Department at the Centre Tecnològic de Telecomunicacions de Catalunya (CTTC), which manages the development of the open source project GNSS-SDR.
Professional, full-featured receivers are expensive, and even in those cases the users have limited access (if any) to know exactly how position and time information were computed, CTTC said. In addition, these receivers exhibit very few upgrading capabilities. A software receiver allows all kind of modifications and inspections. “GNSS-SDR unleashes the full potential of the signals and, best of all, it is open and for free,” said Carles Fernández-Prades, GNSS-SDR project manager and Head of the Communications Systems Division at CTTC.
GNSS-SDR 2D ENU coordinates precision for the Galileo position fix.
A GNSS software receiver is a computer program that performs all the signal processing from raw satellite signals to the computation of position, velocity and time, just as is done by the GPS chips that are embedded in smartphones and other devices with satellite-based positioning capabilities. The key difference relies on the great flexibility in the design, upgradability and the experimentation possibilities that the software version allows, in opposition to integrated circuits, true black boxes with inputs and outputs but with no accessible information about what is going on inside of them.
“With GNSS-SDR, researchers and technology enthusiasts can easily change the implementation of a certain functional block and assess the impact of that change on the whole receiver performance,” said Pau Closas, GNSS-SDR scientific advisor and Head of the Statistical Inference Department at CTTC. “This paves the way to innovative mass-market, industrial and scientific applications that could make use of Galileo signals but require non-standard features which are not present in mass-market receivers nor in costly professional equipment.”
The first Galileo-based positioning fix, obtained by Javier Arribas using a general purpose GNSS antenna and a RF front-end connected to a commodity PC running GNSS-SDR represents an important milestone in the research on GNSS receiver design. “Next steps will be devoted to provide outputs in standard formats that will allow the application of geodesic-grade tools for extremely precise positioning (on the order of centimeters) and higher degrees of reliability,” Arribas said.
GNSS-SDR is the first open source solution that offers this possibility, CTTC said. The source code released under the GNU General Public License (GPL) secures practical usability, inspection, and continuous improvement by the research community, allowing the discussion based on tangible code and the analysis of results obtained with real signals. The source code is complemented by a development ecosystem, consisting of a website, as well as a revision control system, instructions for users and developers, and communication tools.
With GNSS-SDR, researchers from CTTC (with the aid of an open community created around the project, such as the students participating in the Google Summer of Code program in 2012 and 2013 Luis Esteve, Mara Branzanti, Daniel Fehr and Marc Molina) are offering a tool that fosters the use of GPS and Galileo signals in unexpected new ways, making possible applications with unforeseen benefits in a wide range of fields, such as geodesy, robotics, unmanned vehicles and safety-related systems.
The first Galileo Full Operational Capability satellite emerges from the Phenix test chamber after five weeks of thermal–vacuum testing.
ESA’s newest Galileo satellite has emerged from five weeks of simulated space conditions. On Friday, a hatch slid open to end its thermal-vacuum test, a milestone on the way to orbit.
The satellite was placed in the 4.5-meter-diameter Phenix chamber in ESA’s ESTEC Test Centre in Noordwijk, the Netherlands, in late October. Once inside, the air was pumped out to create a space-quality vacuum. The temperature extremes were also reproduced, with the six copper walls of the thermal tent cooled by liquid nitrogen down to -180°C.
A second Galileo has been undergoing the same rigors at the site, along with a vibration and shock test to reproduce separation from the launcher. Thermal-vacuum testing on the second model will begin early next year. The two satellites will be launched on a Soyuz rocket from Europe’s Spaceport in French Guiana midway through this coming year. They are the first two Full Operational Capability (FOC) satellites, following on from the first four already in orbit.
The next Galileo is expected to arrive at ESTEC in March, with further satellites following every seven weeks or so. A total of 22 FOC satellites are being built by OHB in Germany, with navigation payloads being delivered from Surrey Satellite Technology Ltd. in the UK.
November 29, 2013, marks the 210th anniversary of the birth of Christian Doppler. His work laid down the fundamental concepts that enabled researchers at Johns Hopkins University in the United States to make observations on the signals of Sputnik I during the International Geophysical Year of 1957. From those observations more than 60 years ago, we can trace the development of GNSS as we know it today. The very genesis of GNSS drew on the combined science, technology, and innovation from Europe, the United States, and Russia. Today, GNSS is a truly global technology that has changed for the better the lives of an estimated one billion people.
2013 also saw a major milestone in the global history of GNSS with the announcement by the European Space Agency (ESA) that the Galileo system had generated its first position fix using operational space vehicles. Here at Trimble we have for some time been providing user equipment that is ready for the modernized, multiple-constellation environment emerging in the coming years. It is still exciting to see the plans of the GNSS operators gradually become a reality, whether it is the ongoing deployment of Galileo and BeiDou or the modernization of GPS and GLONASS. There is no doubt that GNSS users worldwide will benefit significantly from these new developments, and it is natural to expect that we will see continued user-driven adoption and integration of these systems in the year ahead, together with new applications and services that make full use of the expanding GNSS capabilities.
Global Addiction to Accuracy
We have come to expect — if not demand — that technologies continuously evolve to become faster, smaller, and more cost-effective, while also providing expanded functionality and benefits. For GNSS, this expectation includes increased accuracy and precision for a growing proportion of the total user base, together with a desire to determine location in more places or, ultimately, ubiquitously.
From a technological perspective, the trend to increased accuracy is moving beyond local or regional land- or satellite-based differential augmentation toward global networks and services. New technologies such as Trimble RTX use data from a global network of GNSS stations together with global connectivity and communications to facilitate precise point positioning without the need to connect to local or regional reference station networks. Such capabilities simplify the user’s experience with precise positioning, while at the same time vastly expanding the areas on Earth where such positioning can be quickly and conveniently carried out.
Over the past decades, high-precision GNSS positioning has been adopted by increasingly larger numbers of users in the context of end-to-end work-process solutions in industries from agriculture to construction, surveying and mapping, energy, mining, utilities, transportation, and government, to name but a few. With assets, workers, and work sites spread over large geographic areas, these industries and operations have transformed how their work is done through the use of systems that incorporate real-time location information. While we should expect adoption and advancement in these areas to continue due to the compelling economic, safety, and environmental benefits provided, we should also expect to see increasing adoption of high-precision GNSS positioning in new applications such as intelligent transportation and within some proportion of the consumer user base. Accuracy is, after all, addictive.
Availability, Too. Along with accuracy, availability of position is also proving to be addictive; once we come to depend on location-enabled systems in our professional and personal lives, our needs and expectations will naturally tend toward that of continuous availability at all times and regardless of location. Although new constellations with more satellites and new, stronger signals help in this regard, augmentation of GNSS plays a key role on the path to more robust ubiquity. From a Trimble perspective, many of our new product launches during the past year incorporated deep integration of multiple measurement technologies. New systems combine GNSS with inertial measurement units, gyros, tilt sensors, seismometers, optical measurement, imaging systems, lasers, and other sensors or technologies, all enabling location and movement determination (increasingly in three dimensions) of more objects in more places — including, in some cases, even inside buildings. Looking to the future,we can expect the appetite for ubiquitous positioning to continue unabated.
Multiple sensors are also used to collect non-geographic information. Increasingly, innovation is taking place at the intersection and aggregation of many different types of data, providing new insights and enabling more informed, more timely, and more insightful decisions across almost every facet of human activity. GNSS is rapidly expanding its role as an enabling technology in this regard. While we know that delivering consistently accurate positions is a decidedly nontrivial achievement, those positions are often just one component of increasingly large and complex endeavors. In fact, much of the innovation today lies in applications that enable new, more efficient approaches to work and enterprise management, and in the creation of new and powerful analytics from aggregated data.
Global Utility, Global Business
2013 marks another important anniversary: GPS officially reached Initial Operating Capability twenty years ago on December 8, 1993. In his 2011 State of the Union address, U.S. President Barack Obama cited GPS, along with the Internet, as key examples of how government-funded fundamental research can stimulate innovation and create whole new industries. The combination of those two technologies has transformed our lives in ways even the early visionaries may not have imagined. The U.S. government has contributed to the global success of GPS in ways beyond technological innovation. Following the 1983 Korean Airlines 007 disaster (caused in part by inaccurate navigation), President Reagan declared that GPS should be free and available to all, providing a stable policy foundation upon which successive U.S. administrations have continued to build, increasingly recognizing the importance of civilian GPS applications.
Importantly, the United States strengthened this open-access policy framework by publishing the Interface Control Document for GPS, which enabled entrepreneurs and innovators anywhere in the world to bring to life their ideas about how this new technology in space could be used on Earth. For the most part, other governments have followed U.S. leadership in announcing predictable policy access to worldwide satellite positioning and timing availability, allowing innovation to take place wherever it may. In the process it spawned a truly global industry.
Technology alone has not achieved the global impact of GNSS. Rather, it is the combination of technology, a transparent, stable policy environment conducive to global innovation and adoption, and the economics of a global market that together have led to so many people today enjoying the benefits that GNSS provides. Such alignment is equally important for the future: just as GNSS from the beginning built upon knowledge and achievement from around the world, its full international potential will be best realized through global, user-driven innovation, vibrant international entrepreneurship, and robust open markets. Given that we are still far from reaching that full potential, there is good reason for us all to have great expectations of GNSS operators, the industry, and the user community in 2014 and beyond.
Peter O. Large joined Trimble in 1996 and has served as a vice president and a member of the executive committee since 2010. He holds a BSc (Hons) in surveying and mapping science from the University of Newcastle upon Tyne, UK, and an M.S. in management from Stanford University.
View of the Czech Republic’s capital Prague from the Vltava River.
The Fourth International Galileo Colloqium, taking place in Prague, Czech Republic, December 4-6, will bring together leading members of the European scientific community and their international partners. They will propose ways of increasing Galileo’s scientific uses to those in charge of operating and developing the system, and to contribute to future satellite navigation development based on scientific approaches.
As Galileo takes shape, as well as offering precision navigation and timing services around the world it is also shaping up to become a promising tool for science, according to the European Space Agency. The satellites orbiting Earth and the signals that will increasingly rain down upon it are useful new yardsticks for the measurement of our planet — from the supposedly solid Earth to its land surface and oceans, and the atmosphere surrounding it.
A differential-grade satnav receiver kept at the same point for a long time reveals very slight geological movements, down to centimetre scale. This is the basis of existing GPS networks, set to be bolstered by Galileo.
Combining orbital velocities with nanosecond-accuracy atomic clocks, Galileo should also allow for the study of fundamental physics questions — how space and matter behave at very high speed within very short timeframes.
The colloquium will address four main areas of research:
Applications of the system for weather studies, measurement of Earth and its dynamic behaviour over time, geophysics and space physics, oceanography, land surface and ecosystem studies. Receivers on the ground, in aircraft or on satellites can employ either direct or reflected signals, perturbed signals or radio occultation, where signal refraction or delay can be employed to deduce characteristics of the atmosphere.
Developments in physics applicable to future global satellite navigation systems, particularly in testing fundamental laws in astronomy and quantum communication, and the potential of relativistic positioning systems.
Aspects of metrology — the science of measurement — such as reference frames, onboard and ground-based atomic clocks as well as precise orbit determination.
ignal propagation through the atmosphere, including tropospheric and ionospheric corrections and the means to model and reduce unwanted reflected-signal multipaths and interference.
Hosted at the Czech Republic’s Ministry of Transport, Prague is an appropriate venue for such discussions, having played a major role in the history of physics.
Located in a square near the centre of the Czech capital, the Prague Astronomical Clock was among the world’s most accurate timepieces in medieval times. It was put in place back in 1410, incorporating various astronomical and religious details, and is still working to this day.
The city’s Prague Astronomical Clock was among the world’s most accurate timepieces in medieval times, while 16th-century astronomers Tycho Brahe and Johannes Kepler collaborated here, on the ways to discovering the laws of planetary motion. The 19th-century physicist Christian Doppler formulated what became known as the Doppler Effect while teaching in Prague.
In 1911 Albert Einstein became professor of theoretical physics at the Prague German University, a few years before developing his general theory of relativity.
Today, general relativity has had to be taken of account of by Galileo designers, because Earth’s curvature of spacetime and satellite motion means orbiting clocks tick faster than their equivalent clocks on the ground on the order of tens of microseconds — enough to induce kilometre-scale positioning errors if left uncorrected.
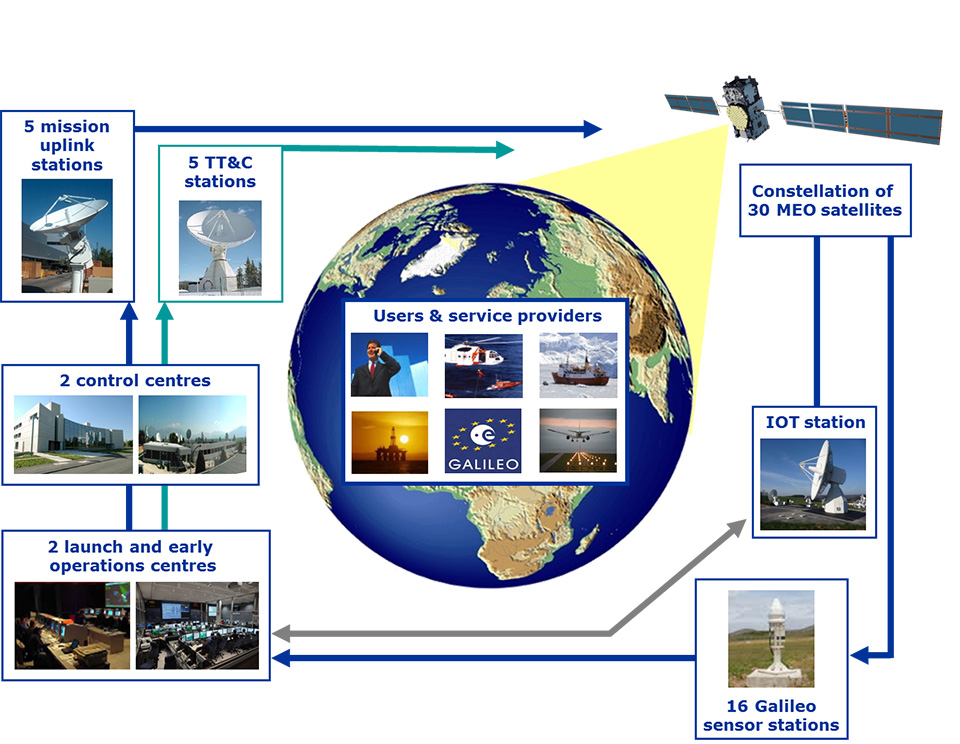
With four satellites in space, launched by pairs in October 2011 and October 2012 from French Guiana, the Galileo project is now successfully completing the In-Orbit Validation (IOV) phase. The Galileo space, ground, and user segments have been qualified through extensive on-ground and in-orbit tests, and operations, of a core satellite constellation and the associated ground segment.
The IOV architecture is being implemented as an integral part of the Full Operational Capability (FOC) — that is, the complete system, consisting of 30 satellites and a set of remote stations distributed worldwide to command and monitor the constellation and deliver the navigation and timing services to the users. Now that the overall design has been validated, the system will be progressively completed, in a staggered approach, to reach the FOC.
Figure 1. Galileo System Architecture.
Galileo System Overview
A joint initiative by the European Union and the European Space Agency, Galileo is one of the most ambitious and technologically advanced service-oriented systems being developed in Europe. A navigation satellite programme under civilian control, it is meant to provide positioning, navigation and timing signals on a global scale.
Galileo is based on a constellation of 30 satellites organized in a 24-satellite nominal constellation plus six active spares, a worldwide network of ground stations, and a number of Control Centres established in Europe to control the constellation, perform the navigation mission management, and monitor system performances
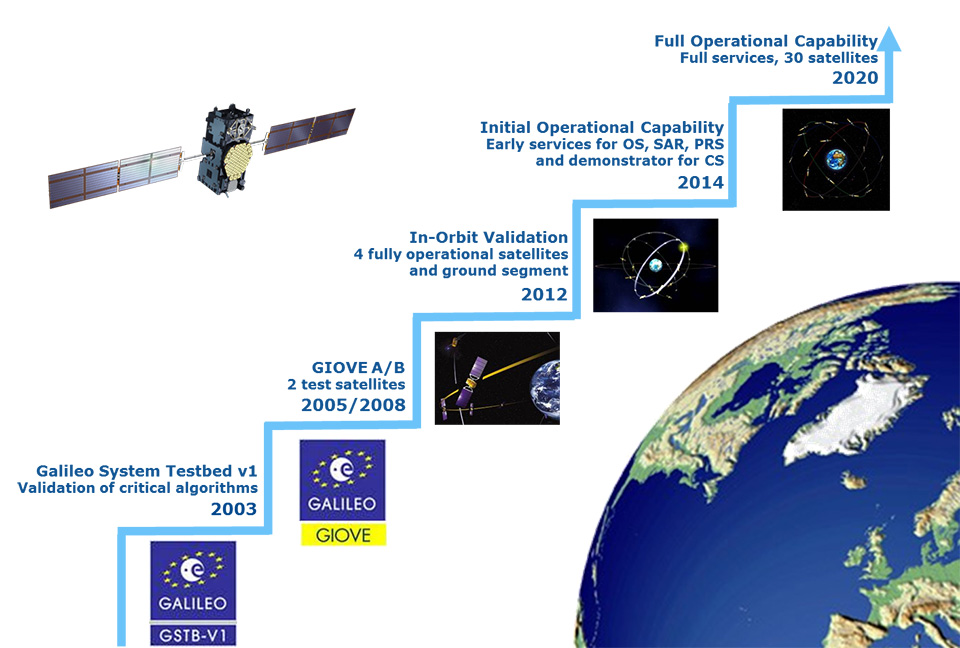
The Galileo programme is following an incremental path towards the deployment of the complete system and the exploitation of services.
The programme has been structured according to the main following phases:
IOV phase, to develop and validate in-orbit performance;
Initial Operational Capability (IOC) phase, including Early Services, to start delivering limited but guaranteed services, promoting chipset and receiver developments, downstream applications, and pilot projects by EU Member States;
FOC phase, to deploy in full the ground and space infrastructure as required for full operational capability;
Operations and service provision phase to operate the FOC infrastructure and provide navigation services over the system lifetime.
The definition, development, and IOV phases of Galileo were carried out by the European Space Agency (ESA) and co-funded by ESA and the European Union. The FOC phase is managed and fully funded by the European Union and supervised by the European Commission (EC). The EC and ESA have signed a delegation agreement under which ESA acts as design and procurement agent on behalf of the EC.
Galileo Early Services
ESA began navigation systems research and development in cooperation with the EC and the civil aviation community. The development strategy was conceived with two major pillars: the European Geostationary Navigation Overlay Service (EGNOS), a pan-European augmentation system, complementing GPS to deliver reliability information to users, and Galileo. Today, EGNOS is operational and certified, forming the basis of a wide range of general and safety-critical applications across the European continent.
Once Galileo becomes operational, a portfolio of navigation services will be offered by Galileo and EGNOS, based on varying user needs.
Galileo’s full operations and services will commence when all the satellites have been deployed, with the complete constellation of operational satellites and spares, supported by an extensive network of ground stations and local and regional service centres in their final configuration.
However, after a political decision by EC Vice-President Antonio Tajani, Galileo will start officially delivering Early Services as from the end of 2014.
Based on the space and ground configuration available in 2014, the following early services are targeted:
Open Service: delivery of stable E1, E5a, and E5b signals in space from a number of satellites in orbit, allowing users to perform ranging, E1 and E5a being interoperable with GPS;
Public Regulated Service: delivery of stable, secure E1 and E6 signals in space allowing pilot projects with EU Member States, to demonstrate PRS management capabilities;
Search and Rescue: guaranteed SAR forward link, which allows the detection and localization of COSPAS-SARSAT distress beacons;
Commercial Services: initial demonstration of precise positioning and authentication services with potential service providers.
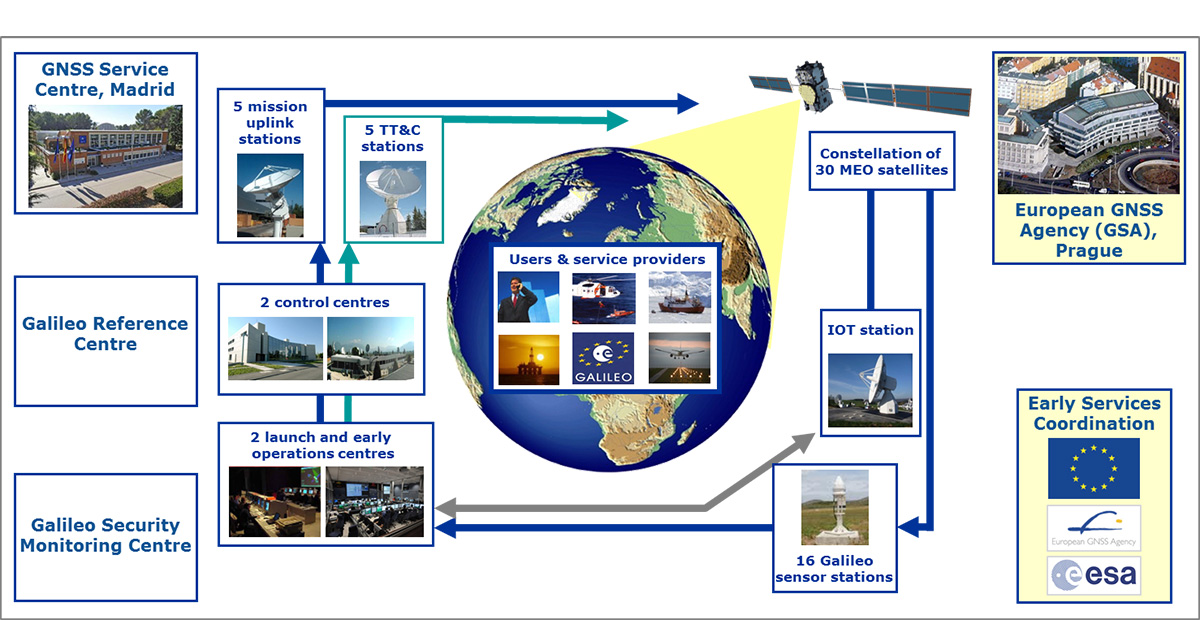
The Early Services phase is being prepared in close coordination by engineers from the EC, the European GNSS Agency (GSA), and ESA. The activities include the definition and procurement of infrastructural assets other than the Galileo core system, namely the GNSS Service Centre, which is the interface with user communities, and the Galileo Reference Centre to monitor service performance. Organizational and operational pillars of the Early Services provision are also defined with the public and industrial organizations involved and their governance and with all processes required for the delivery of services with all their dynamics. A service definition document defining expected service behavior and non-functional properties will be made available to all users through the GNSS Service Centre website.
Figure 3. Galileo Early Services Organisation.
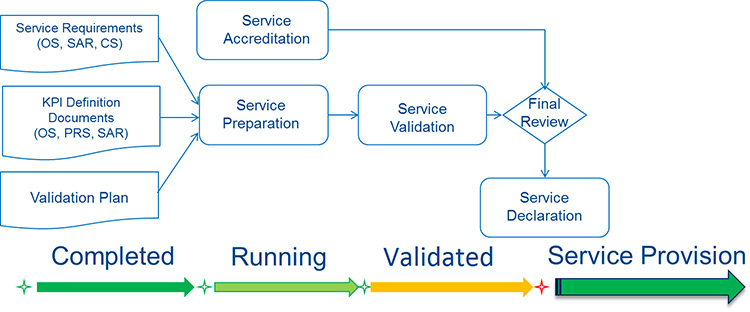
Service performance will be monitored by the Galileo Reference Centre over time by means of key performance indicators (KPIs), with target values and target ranges to be achieved over a certain time period. As far as processes are concerned, performance (quality, reliability, throughput), productivity (efficiency, effectiveness) and safeguards (security, safety) will be monitored over time.
Prior to official declaration of the Early Services, KPIs and technical performance will be monitored during a Service Validation Phase, aiming at a confirmation of the readiness of the overall service organization.
Figure 4. Service Validation Activities.
As part of the service validation, receiver and chipset manufacturers will be offered the possibility to test the performance of Galileo. The objective is to verify the market readiness and optimize Galileo use in a multi-constellation environment. A call for interest went out in July 2013, and leading mass-market chipset and professional receiver manufacturers have expressed interest in participating in the test campaign.
The tests have been adapted to the nature of the applications and markets targeted by each manufacturer. A first set of tests is planned at ESA, focusing on mass markets. These tests will evaluate assisted GNSS performance in difficult environments such as urban canyons. They will also address the need for a seamless switch from outdoor to indoor.
Another set of tests is planned at the European Union Joint Research Centre (JRC). They will respond to the needs of high-precision users, testing, for example, dual frequencies. Each test will be performed for different combinations of available GNSS to evaluate and demonstrate the added value of Galileo. The testing will start at the beginning of 2014 with laboratory tests based on simulated data and will continue during 2014 using real Galileo data.
Conclusion
Galileo will be an autonomous, global, European-controlled GNSS providing several guaranteed services to users equipped with Galileo-compatible receivers. From a value-chain viewpoint, Galileo is a system providing services meant to support or make feasible other service systems. Together with the introduction of state-of-the-art technology and of very complex system architecture, the delivery of sophisticated services is established on well-defined governance, operational, and regulatory bases.
After the successful completion of the IOV phase, Early Services will mark a new, substantial milestone towards the system’s full operational maturity and the exploitation of its capabilities and services.
Eric Chatre is the Head of Sector on Services and Exploitation for the EU Satellite Navigation Programmes in the European Commission, EC. Horst Faas is GNSS exploitation programme manager at the European GNSS Agency (GSA). Marco Lisi is GNSS services engineering manager at the European Space Agency.
On August 30, QinetiQ and Rockwell Collins demonstrated the first joint satellite navigation positioning using live signals from the encrypted governmental services from the U.S. Department of Defense (DOD) GPS Precise Positioning Service (GPS-PPS) and the new European Galileo Public Regulated Service (PRS). The signals on GPS L1 and L2, together with Galileo PRS L1A and E6A, were processed and combined to form multi-frequency, multi-constellation position fixes.
Positioning, navigation and timing (PNT) services provided by GNSS, such as GPS and the forthcoming Galileo system, are essential to underpinning both commercial and economic activity (the EC estimates 6-7% of the developed world’s GDP) and the delivery of governmental responsibilities including the safety and security of citizens.
GNSS systems such as GPS and Galileo make use of very low power signals and are subject to inadvertent interference, deliberate jamming and spoofing (where an attacker generates a false signal masquerading as a valid one to mislead a user receiver). Attacks on GNSS may range from low-level criminal nuisance (a delivery driver stopping their employer tracking them), enabling theft of high-value vehicles fitted with trackers, through to state-sponsored attacks. This is potentially a significant concern for a wide range of governmental users including law enforcement, security and emergency services, critical national infrastructure, transport and defense users. The use of multiple independent, secured navigation services provides significant improvements to navigation robustness and, along with other measures, offers substantial counters to these threats.
“This has been our first opportunity to explore how secured navigation services on GPS and Galileo can be used together to provide users with critical reliance on PNT with robust and continuous navigation services,” Nigel Davies, Head of QinetiQ’s Secured Navigation Group said. “QinetiQ is proud to be a key, long-term contributor to the Galileo Programme, having been working closely with the European Space Agency (ESA), the European GNSS Agency (GSA), European industrial partners and European Member States since 2003. QinetiQ and Rockwell Collins wish to thank ESA, the EC and GSA for support in accessing Galileo, as well as the UK Space Agency, UK Satellite Applications Catapult and the UK MOD for their support.”
Online analysis of athletes’ tactical, technical, and physical capability is the focus of this year’s newly named Galileo Master, Kinexon GmbH.
The 10th European Satellite Navigation Competition (ESNC) recognized the best products, services, and innovations that facilitate the use of satellite navigation in everyday life. At the 2013 awards ceremony, prizes worth a total of about EUR 1 million were presented in 32 categories. The ceremony helped kick off the European Space Solutions conference, which is taking place November 5-7 at Alte Kongresshalle München.
ESNC 2013 gave participants from all around the world the chance to vie for any one of 25 regional prizes. In addition, topic-specific special prizes were sponsored by the following partners: the European GNSS Agency (GSA), the European Space Agency (ESA), the German Aerospace Center (DLR), and — for the first time this year — the European Patent Office (EPO) and Metaio GmbH. Students and research assistants were also encouraged to submit their ideas to the ESNC University Challenge.
Athletic analysis is playing an increasingly important role in modern sport training. The underlying idea — known as the Hawthorne effect — is simple: if you can measure your performance, you can also improve it. Following this principle, two research assistants from Technische Universität München (Germany) founded the company Kinexon GmbH at the ESA Business Incubation Centre Bavaria and developed a cloud-based solution for analyzing and visualizing training data on mobile devices.
Kinexon’s solution kits athletes out with a small, portable location sensor and feeds the resulting data into the cloud by means of a stationary base antenna. This enables users to track and analyze performance parameters and tactical movements down to the centimeter in real time.
In particular, however, it was the solution’s user-friendliness during training and relatively low cost (compared to the camera-based systems commonly seen today) that won over the international jury of experts in the European Satellite Navigation Competition. So far, the high price of such systems has limited their use to professional sport; Kinexon’s system will now give amateur clubs the chance to benefit from adding online analysis to their training activities, as well.
Along with the sport sector, this flexible satellite-based localization system also exhibits huge potential in tapping into further markets, including healthcare, logistics, and unmanned aerial vehicles (UAVs). “We’re pleased to be supporting Kinexon at ESA BIC Bavaria,” affirms Thorsten Rudolph, CEO of Anwendungszentrum GmbH Oberpfaffenhofen. The Kinexon system, the first version of which is set for market launch in November 2013, managed to edge out more than 400 other ESNC entries from nearly 50 countries.
Gerd Gruppe, member of the Executive Board, German Aerospace Center (DLR), conferred the EUR 20,000 grand prize on Kinexon GmbH founders Oliver Trinchera and Alexander Hüttenbrink.
“DLR sets great store in technology transfer,” Gruppe said. “After all, innovations form the basis of economic success and hold considerable potential for society. The ESNC has developed into a driving force behind the innovative use of satellite navigation technologies and a starting point for numerous successful start-ups in Germany, Europe, and the rest of the world.”
Winners of the 10th European Satellite Navigation Competition
In addition to the overall winner, the Galileo Master, the 10th European Satellite Navigation Competition rewarded Special Prizes in seven different categories and 25 prizes to regional winners.