Since 2007, the worldwide scientific community has met every two years to discuss the possibilities for boosting the scientific use of Galileo and for contributing to the development of the GNSS.
The event is always organized in one of the 20 European Space Agency’s Member States, and makes an essential contribution to ESA’s implementation and definition of the evolution of the European GNSS. The gathering of major academic players provides a scientific reference for institutional executives and industry, as well as offering a unique platform for promoting innovative GNSS initiatives at large.
The colloquium focuses on four major areas of research:
Scientific applications in meteorology, geodesy, geophysics, space physics, oceanography, land surface and ecosystem studies, using either direct or reflected signals, differential measurements, phase measurements, radio occultation measurements, using receivers placed on the ground, in aircraft or on satellites.
Scientific developments in physics, dealing with future GNSS, particularly in testing fundamental laws in astronomy and in quantum communication. Relativistic reference frames and relativistic positioning will be addressed.
Aspects of metrology such as reference frames, onboard and ground clocks, and precise orbit determination.
Scientific aspects of satellite navigation and positioning such as signal propagation, tropospheric and ionospheric corrections and the means to model and mitigate multipath and interference.
The various possibilities to use navigation satellites such as Galileo for scientific purposes will be reviewed and the use of scientific applications to contribute to make the most of the present systems and define their evolution will be scrutinized.
The conference is being organized as a series of plenary talks and two parallel half-day sessions.
Delta IV, the current GPS launch vehicle, awaits a date with space at Cape Canaveral.
Launch Delays Ground GPS IIF and Galileo FOC
The scheduled October 23 launch of GPS IIF-5, the fifth in the current “follow-on” generation of GPS satellites, has been postponed in order to complete a review of an adjustment made to the rocket’s upper stage engine. A loss of thrust by a Delta IV rocket upper stage during a GPS launch last year worried the Air Force and the United Launch Alliance (ULA), though the satellite successfully reached its intended orbit.
A subsequent investigation identified a fuel leak in the engine system as the culprit. Two medium Delta IV rockets and one heavy version have launched since then, but ULA said further investigation had produced new information about the engine’s first start.
While no new launch date has been set, the ULA released a statement:
“The ongoing Phase II investigation has included extremely detailed characterization and reconstructions of the instrumentation signatures obtained from the October 2012 launch and these have recently resulted in some updated conclusions related to dynamic responses that occurred on the engine system during the first engine start event.
“The GPS IIF-5 Delta IV launch is being delayed to allow the technical team time to further assess these updated conclusions and improvements already implemented and determine whether additional changes are required prior to the next Delta IV launch.
“The Delta IV booster for the GPS IIF-5 mission has completed the standard processing and checkout on the launch pad and will be maintained in a ready state for spacecraft mate and launch pending completion of this assessment. A new launch date will be established when the assessment of the updated dynamic response information is completed in the coming weeks.”
A Soyuz rocket (right) will carry Galileo FOC satellites, but no sooner than June 2014.
Galileo. Continuing delays in ground testing of the first two fully operational Galileo satellites have postponed their launch to June 2014 at the earliest.
According to European officials, the European Space Research and Technology Centre (ESTEC) thermal vacuum chamber for testing satellites under orbit conditions was not ready for the two FOC satellites delivered by OHB in late summer.
The satellites thus cannot ship to the Guiana spaceport in South America in time for a planned 2013 launch on a Soyuz rocket. The Galileo schedule is also running into bottlenecks with scheduled launches by other satellite programs aboard Guiana Soyuzes.
A six-week test of the first Galileo satellite at ESTEC reportedly got under way in October.
Svalbard station on Spitsbergen in the Norwegian Arctic.
Ground Network Supports Galileo for SAR
Completion of a pair of European Space Agency dedicated ground stations at opposite ends of that continent has enabled Galileo satellites in orbit to participate in global testing of the Cospas–Sarsat search and rescue system.
The Maspalomas station, in mid-Atlantic Canary Islands, was activated in June. In September, the Svalbard site on Spitsbergen in the Norwegian Arctic activated. The two sites can now communicate and will soon undertake joint tests.
The International Cospas-Sarsat Programme is a satellite-based search and rescue (SAR) distress alert detection and information distribution system, established by Canada, France, Russia, and the United States, with participation by 33 other countries.
Activation of the two new stations enables participation of the latest two Galileo satellites in a worldwide test campaign for Cospas-Sarsat expansion.
The program is introducing a new medium-orbit SAR system to improve coverage and response times, with the Galileo satellites in the vanguard.
The second pair of Europe’s Galileo satellites — launched together in October 2012 — are the first of the constellation to host SAR payloads. These can pick up UHF signals from emergency beacons aboard ships or aircraft or carried by individuals, which are then relayed to ground stations. There, the source is pinpointed and automatically passed on to a control center, which then routes it to local authorities for rescue.
“The Galileo satellites, tested in combination with the same SAR payloads on Russian GLONASS satellites as well as compatible repeaters on a pair of U.S. GPS satellites, showed an ability to pinpoint simulated emergency beacons down to an accuracy of 2–5 kilometers in a matter of minutes,” explained Igor Stojkovic, ESA Galileo SAR engineer.
“Our in-orbit validation tests so far have been in line with expectation and beyond, giving us a lot of confidence in the performance of the final system, once completed. And using a combination of satellites is just how the upgraded system will operate in practice, in order to localize distress signals.”
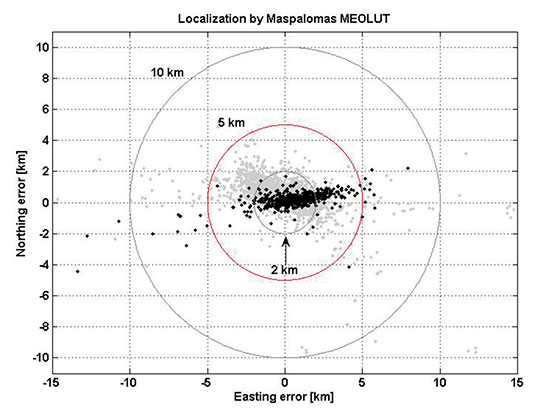
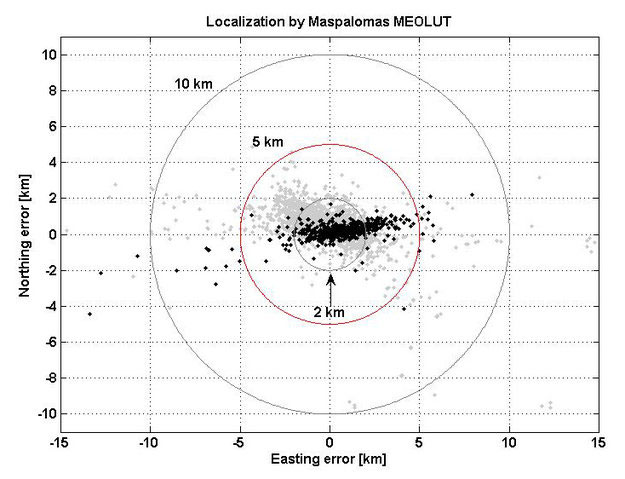
Localization test performed from Maspalomas MEOLUT as part of Galileo’s SAR in-orbit validation. Beacon locations obtained with four satellites are shown in black, while those using three satellites are shown in grey. More than 93 percent of all beacon locations, after only a single beacon burst has been received, are within the required five kilometers from actual beacon position.
System Briefs
GLONASS Seeks UK Ground. According to the website of the Russian magazine GLONASS Messenger, the Russian Federal Space Agency communicated its proposals for specific areas in the United Kingdom (or, more likely, its territories) to accommodate stations of the GLONASS System for Differential Correction and Monitoring (SDCM). Apparently, an offer was made by the deputy head of Roscosmos, Oleg Frolov, in discussions with David Parker, the director of the British Space Agency. The desired locations for the stations will not be disclosed until the approval of their establishment by the British side, the website reported.
Head Rolls. After repeated satellite launch failures and rumblings about embezzlement and corruption within the Russian space program Roscosmos, Vladimir Popovkin was let go as director and replaced by Oleg Ostapenko, a colonel general in the Russian Military, deputy minister of Defence, and former commander of the Aerospace Defence Forces. The Russian government also announced formation of new agency, the United Rocket and Space Corporation, to manage satellite and rocket manufacturing facilities heretofore supervised by Roscosmos.
Navigation Support Office Provides Services for IGS and Users
By Werner Enderle, Loukis Agrotis, Rene Zandbergen, Mark van Kints, and Jens Martin
The European Space Operations Centre has taken on the roles of real-time analysis center, data provider, and analysis-center coordinator for the International GNSS Service’s Real-Time Service, providing a number of products combining data streams from multiple sources.
The Navigation Support Office of the European Space Agency’s Space Operations Centre (ESA/ESOC) in Darmstadt, Germany, has for the last decade been involved in activities related to the provision of real-time GNSS augmentation services. The motivation for these activities is to support a number of ESA objectives, including:
Orbit determination support for low-Earth orbit missions using GNSS;
Development and validation of operational capabilities, with an emphasis on Galileo;
GNSS infrastructure development, including advanced techniques for better exploitation of the European GNSSs, Galileo, and EGNOS;
Research, development, and support to European industry through technology transfer.
The concept adopted is the generation of precise GNSS orbits using state-of-the-art batch orbit-estimation software. The predicted orbits, accurate to a few centimeters, are used in a Kalman filter, operating in real time, to estimate precise corrections to the satellite clocks from GNSS observations received from a global real-time receiver network. The orbit and clock products can then be made available to users with a latency of 3–4 seconds from the observation epoch.
The software architecture is modeled after concepts used in satellite control centers with the real-time observation and product streams treated in the same way as satellite telemetry data. A concept of circular history files has been developed, combining seamless real-time processing and retrieval capabilities with the ability to archive data for historical playback. Extensive display and visualization capabilities are also available.
Participation in the International GNSS Service (IGS) Real-Time Pilot Project has enabled validation of the ESOC software, with continuous operation and monitoring of two solution chains, starting in 2008. As the IGS Real-Time Analysis Center coordinator, ESOC has developed and operates a real-time combination solution, combining streams from multiple sources, as an offering of the IGS Real-Time Service, formally launched in April 2013.
GNSS Infrastructure
The ESOC software infrastructure modeled after real-time satellite control systems includes many of the elements for data processing, archiving, and visualization that are common to such systems. In particular, it implements a specially designed circular filing system for streaming data, allowing maintenance-free operations for processing and archiving of data and products, and seamless transitions from historical to live data processing. Additionally, it includes a highly sophisticated job scheduler for automating operations and an integrated events and alarms monitoring system.
The software subsystems belong to one of three functional categories:
Infrastructure. Software is written in C++. The main components are middleware elements for history filing and event logging and a job scheduling application. All middleware elements have C++, Java, and FORTRAN interfaces.
Algorithmic. Software is written in FORTRAN 90, C++ or Java. It incorporates applications for real-time and batch data processing and estimation and for generation of products and comparison statistics between results sets.
Visualization. Software is entirely written in Java for portability. It includes real-time graphical and alphanumeric display applications and the graphical user interface.
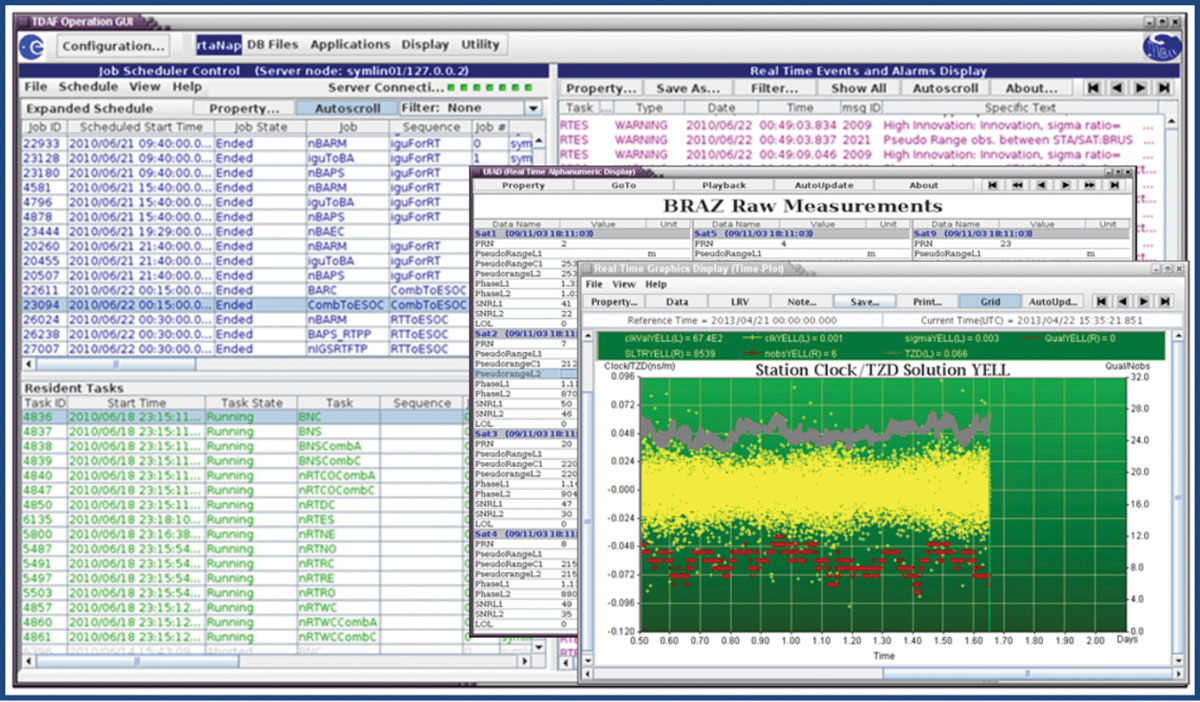
Figure 1 shows the integrated desktop that provides all the functions for software configuration, monitoring, and control. Also shown are examples of graphical and alphanumeric displays. The integrated desktop combines the job scheduler display (left side) with the events display (right), allowing the operator to easily monitor the status of all running batch and real-time applications.
Figure 1. Real-time processing desktop and sample displays.
The job scheduler is configured to submit all batch jobs at pre-defined times or intervals, and to monitor the real-time applications. The batch orbit determination function is typically executed every two hours and includes jobs for screening and processing observations from up to 80 stations. The predicted orbits from these runs are updated to provide the most recent information to the real-time estimation.
The job scheduler also acts as a watchdog to ensure that all real-time processes (resident tasks) are continuously running. Any abnormal termination is detected, and the relevant task is restarted automatically. This can also guard against hardware failures, because tasks can be configured to run on more than one hardware node and will be restarted on a backup node if the prime fails.
Resident tasks are used for processing and filing observation and broadcast ephemeris messages and for performing the real-time estimation. The real-time estimation processes phase and pseudorange observations arriving at the rate of 1 Hz and screens the data to detect outliers and cycle slips. It uses a Kalman filter to estimate multi-GNSS satellite and receiver clock corrections, tropospheric zenith delays at each observing site, and phase biases for each satellite-receiver link. The estimation interval is user-configurable and is currently set at 5 seconds. The estimated satellite clock corrections and predicted orbit information are sent to an output stream and disseminated to users in the form of RTCM SSR messages.
The software capabilities were originally designed to support the GPS constellation. These capabilities have now been extended to support all the available GNSS constellations, with emphasis on Galileo. In addition to multi-constellation, the capability of multi-frequency processing has been added.
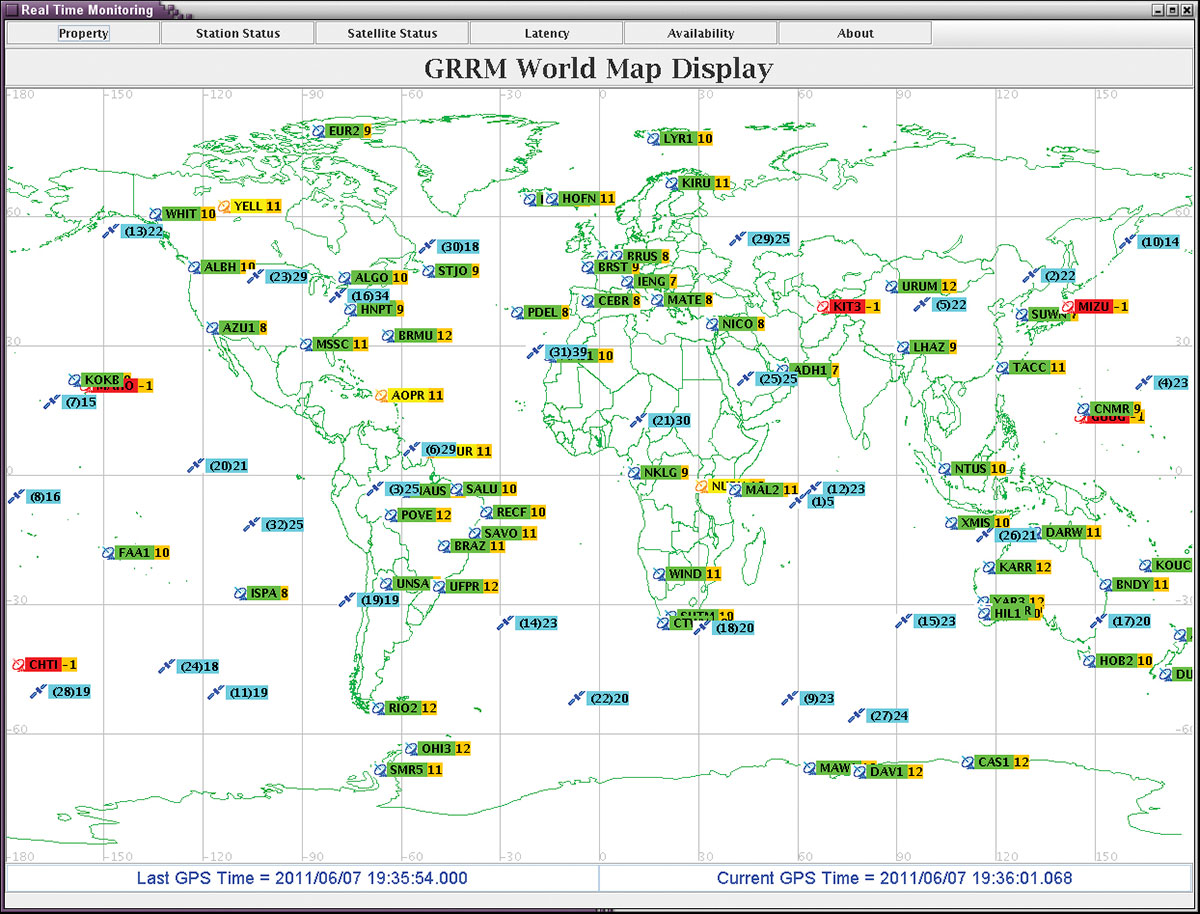
A network status monitoring display in the form of a world map (see Figure 2) gives the operator an overview of the network data flow. Station and satellite icons are color-coded to reflect the health of the live data links. It is also possible to see the number of live links to each station or from each satellite and the data latency and percentage availability of the observations from each station.
Figure 2. GNSS network status monitoring display (GPS-only).
To supplement the investment in software, ESOC has maintained and expanded the capabilities of its receiver network. This takes advantage of the existence of a number of ESA-operated satellite tracking sites with the necessary infrastructure (power, communications, atomic frequency standards, concrete pillar for mounting of the GNSS antennas) to host GNSS equipment with minimal additional operating costs. All ESA sites are now equipped with multi-GNSS capability receivers and associated antennas. Additional sites are also being procured with the objective of creating an independent network of around 30 sites with global coverage.
Real-Time Activities, Projects
The investment in GNSS software, equipment, and infrastructure has enabled ESA to participate in a number of projects with institutional and commercial partners.
As a major contributor to the IGS, ESOC has been a strong supporter of the IGS Real-Time Pilot Project. Since the original call for participation, and through to the establishment of the recently launched (April 2013) IGS Real-Time Service (RTS), ESA has played a leading role by assuming the roles of real-time analysis center, data provider, and analysis-center coordinator. In the latter role, ESOC is responsible for the generation of the RTS products and has been generating and disseminating IGS real-time combination streams after processing the real-time solutions from up to 10 analysis centers. Included in these solutions are two streams generated by the ESOC Real-Time Analysis Center. One of these uses orbit information generated by the NAPEOS software (ESOC’s Navigation Support Office standard software package for precise orbit determination), which provides orbit updates every 2 hours. The second ESOC solution stream uses the IGS rapid orbit product, which is updated every 6 hours.
Stemming from the recognition that real-time services rely on the development of standards and data formats, ESOC has been instrumental in aligning the interests of the IGS community with those of the Radio Technical Commission for Maritime Services (RTCM). ESOC, along with NRCan, represents the IGS at RTCM meetings. Over the last 4–5 years, this forum, which brings together GNSS service providers, users, and receiver manufacturers, has made significant progress in agreeing on standards for:
real-time orbit and clock correction messages in state space representation (SSR) format;
new multi-GNSS standards for real-time high-precision observations and for broadcast ephemeris dissemination.
ESOC also represents the RTCM at the Galileo Geodetic Reference Interface Working Group, a group of experts advising the EC on exploitation of Galileo services for the geodetic community.
In its mandate to assist European industry, ESOC has been working with Fugro for software development related to the implementation of high-precision augmentation services. The Fugro G2 service, providing augmentation products for GPS and GLONASS, uses software developed by ESA and has been operational since early 2009. The service is being extended to include Galileo, with successful trials already demonstrated by Fugro.
Capabilities and Performance
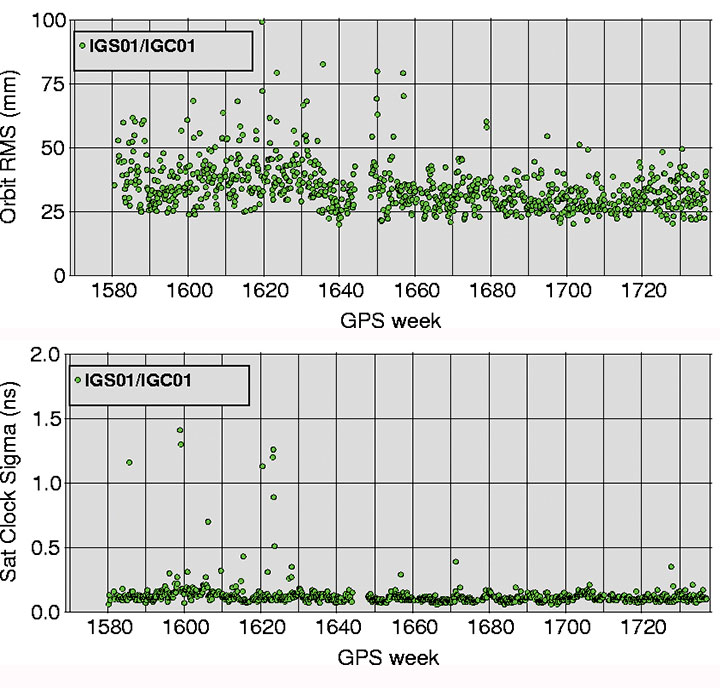
In terms of the IGS RTS, Figure 3 shows the performance of the combination solution produced by ESOC from the results of the contributing analysis centers. The plots show daily clock standard deviations and 1-D RMS orbit differences between the combination solution and the IGS rapid solution. It can be seen that the clock results are of the order of 0.1 nanosecond and the orbit differences at the level of 30–40 millimeters. The advantage of the combination is the ability to identify and eliminate outliers, by examining the differences between the contributing analysis-center solutions. It can be seen that the outliers affecting the early results have been eliminated, with very stable results since around GPS week 1650.
Figure 3. Real-time service orbit and clock comparisons against IGS rapid products.
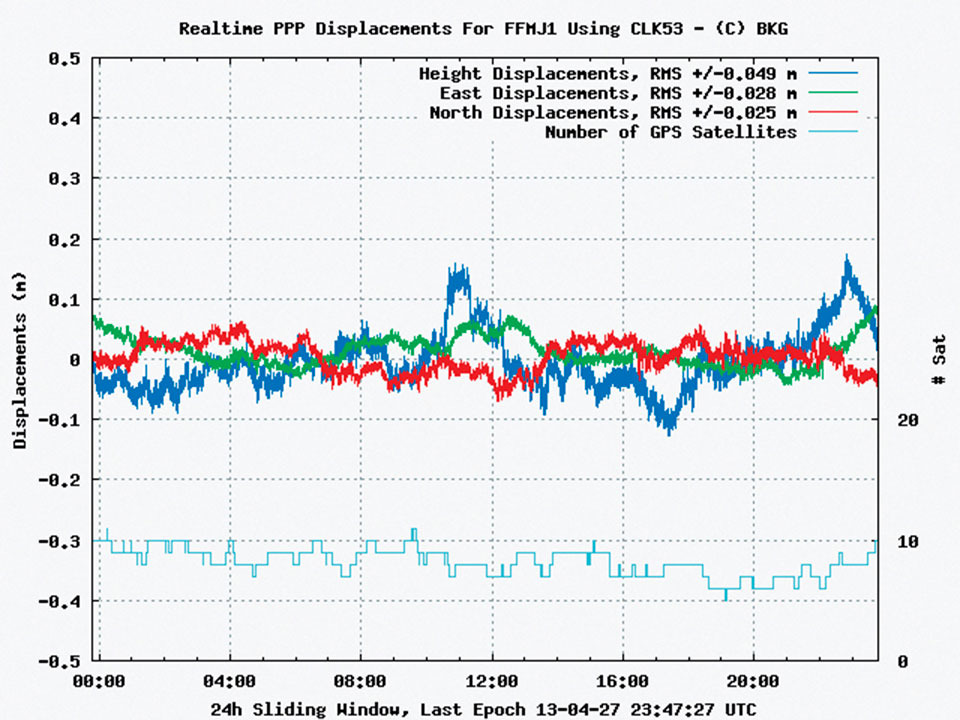
The monitoring of the RTS clock solutions in the precise point positioning (PPP) domain is performed by BKG. Figure 4 shows the kinematic PPP performance of one of the ESOC solutions over an interval of 24 hours. It can be seen that accuracies at the decimeter level can be achieved.
Figure 4. Example of kinematic PPP performance of ESOC solution.
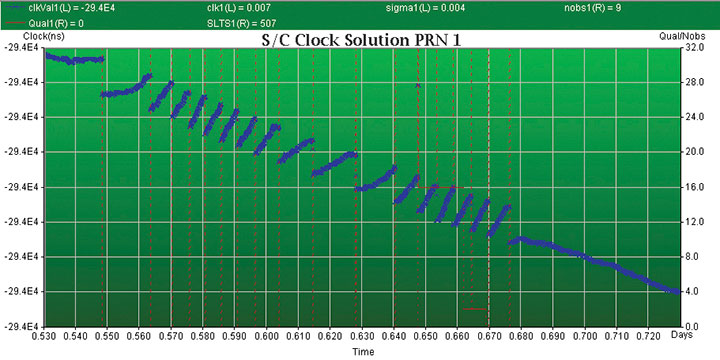
To highlight the importance of combining computational and visualization capabilities, the plot in Figure 5 shows the estimated satellite clock behavior of GPS satellite G01. Since the middle of January 2013, the satellite clock started exhibiting a series of clock jumps with a magnitude of 3 nanoseconds. This pattern was observed once per orbit, with clock jump events every 12 hours. The problem was resolved on February 6, with the satellite being taken out of service and reconfigured. The ESOC capabilities allow for the detection and monitoring of such events in real time, creating the possibilities for a timely response (for example, by suppressing the problematic satellite) to ensure the service is not degraded.
Figure 5. GPS PRN-1 anomalous clock behavior.
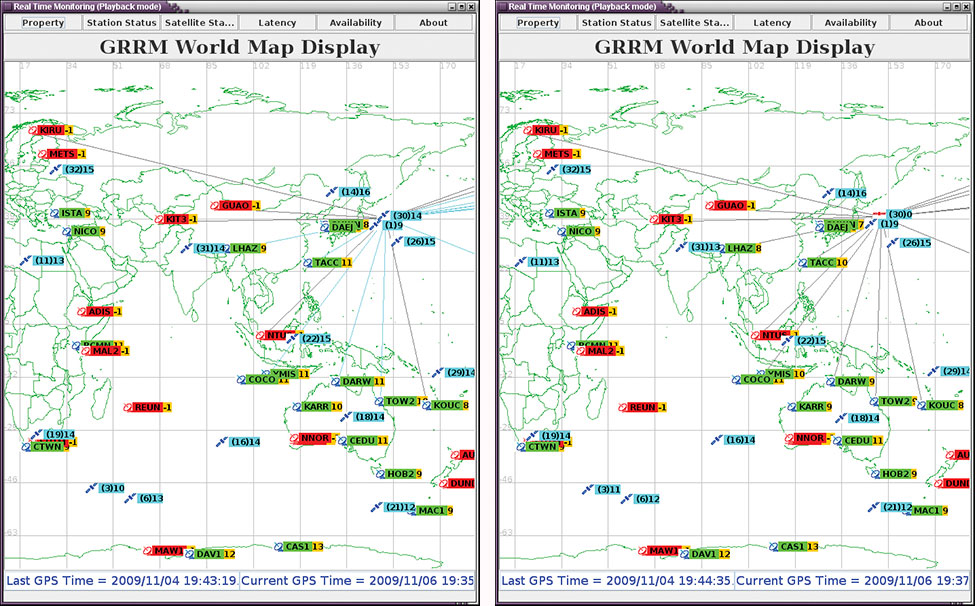
The software visualization capabilities also allow the possibility to identify and visualize signal problems with the satellites. In the example in Figure 6, GPS satellite G30 is seen to be tracked by 14 receivers at 19:43:19 on April 11, 2009. The live links are identified by the light blue lines radiating from the satellite. In the next snapshot, at 19:44:35, all 14 receivers appear to have lost the measurements from this satellite, as the grey lines indicate geometric visibility but no measurements arriving at the stations. At the same times, the receivers are continuing to track other satellites. This behavior has been observed a number of times and is known to affect only the Block IIA range of GPS satellites. A loss of measurements for a period of 1–2 minutes is typically observed.
Figure 6. Signal drop from Block IIA GPS satellite.
Conclusions
The latest improvements of ESOC’s Navigation Support Office software provide full multi-frequency and multi-constellation processing capability. The IGS Real-Time Service is provided as a routine operational service since April 2013, enabling a kinematic precise point position solution at accuracy levels in the 10–20 centimeter range. Existing ESOC real-time capabilities are also ready for potential use within Galileo.
Acknowledgements
ESOC is working with a large number of partners and real-time analysis centers. In particular we would like to thank BKG, NRCan, GFZ, CNES, DLR, GMV, JPL, IGS Governing Board, Fugro, GEO++, TUW, WHU, Geoscience Australia, NGS, UPC.
Werner Enderle is the head of the Navigation Support Office at ESA\ESOC. Previously, he worked at the European GNSS Authority and for the European Commission, in charge of the procurement for the Galileo Ground Control Segment. He holds a doctoral degree in aerospace engineering from the Technical University of Berlin, Germany.
Loukis Agrotis, with his company Symban, is a contractor for ESA working on the development of ESOC’s Real-Time GNSS infrastructure. He is also the Analysis Centre Coordinator for the IGS Real-Time Pilot Project and represents the IGS at the Radio Technical Commission for Maritime Services (RTCM). He holds a Ph.D. in satellite orbits and the Global Positioning System from the University of Nottingham, UK.
René Zandbergen is a navigation engineer in ESA’s Navigation Support Office, based at ESOC in Darmstadt, Germany. He is involved in running operational activities related to high-precision and high-availability navigation support services in near-real time and real time. He holds a Ph.D. in satellite altimeter data processing from the Delft University of Technology in the Netherlands.
Svalbard station on Spitsbergen in the Norwegian Arctic.
The European Space Agency’s completion of a pair of dedicated ground stations at opposite ends of Europe has enabled Galileo satellites in orbit to participate in global testing of the Cospas–Sarsat search and rescue system.The Maspalomas station, at the southern end of the largest island of the Canary Islands, at the southern fringe of European waters, was activated in June. And this last month has seen the Svalbard site on Spitsbergen in the Norwegian Arctic come on line — the two sites can already communicate and will soon be performing joint tests.
This speedy progress has enabled the participation of the latest two Galileo satellites in an international demonstration and evaluation program — a worldwide test campaign for a new expansion of the world’s oldest and largest satellite-based rescue system, Cospas–Sarsat.
The Maspalomas station in the Canary Island has an ESA-built Maspalomas Medium-Earth Orbit Local User Terminal (MEOLUT).
Founded by Canada, France, Russia and the U.S., Cospas–Sarsat has assisted in the rescue of tens of thousands of souls in its three decades of service. Distress signals from across the globe are detected by satellites, then swiftly relayed to the nearest search and rescue (SAR) authorities.
Now the program is introducing a new medium-orbit SAR system to improve coverage and response times, with the Galileo satellites in the vanguard of this major expansion.
Supporting search and rescue is a separate function to Galileo’s main task of providing global navigation and timing services, but no less important.
The second pair of Europe’s Galileo satellites — launched together on 12 October last year — are the first of the constellation to host SAR payloads. These can pick up UHF signals from emergency beacons aboard ships, aircraft or carried by individuals, which are then relayed to ground stations. There, the source is pinpointed and automatically passed on to a control center, which then routes it to local authorities for rescue.
“The Galileo satellites, tested in combination with the same SAR payloads on Russian Glonass satellites as well as compatible repeaters on a pair of US GPS satellites, showed an ability to pinpoint simulated emergency beacons down to an accuracy of 2-5 km in a matter of minutes,” explained ESA’s Galileo SAR engineer, Igor Stojkovic.
“Our in-orbit validation tests so far have been in line with expectation and beyond, giving us a lot of confidence in the performance of the final system, once completed.
“And using a combination of satellites is just how the upgraded system will operate in practice, in order to localise distress signals.”
Localization test performed from the Maspalomas MEOLUT on 29-30 July 2013 as part of Galileo’s search and rescue in-orbit validation. Beacon locations obtained with four satellites are shown in black, while those using three satellites are shown in grey. More than 93% of all beacon locations, after only a single beacon burst has been received, are within the required 5 km from the actual beacon position.
This colloquium intends to bring together leading members of the European scientific community and their international partners. One of its aims is to propose those in charge of Galileo operations and development means of enhancing the scientific use of Galileo and to contribute to GNSS development based on scientific approaches.
The colloquium will address four major areas of research:
Scientific applications in meteorology, geodesy, geophysics, space physics, oceanography, land surface and ecosystem studies, using either direct or reflected signals, differential measurements, phase measurements, radio occultation measurements, using receivers placed on the ground, in airplanes or on satellites.
Scientific developments in physics, dealing with future GNSS, particularly in testing fundamental laws in astronomy and in quantum communication. Relativistic reference frames and relativistic positioning will be addressed.
Aspects of metrology, such as reference frames, on board and ground clocks as well as precise orbit determination
Scientific aspects of satellite navigation and positioning such as signal propagation, tropospheric and ionospheric corrections and means to model and mitigate multipath and interference
During this colloquium, the various possibilities to use navigation satellites such as Galileo satellites for scientific purposes shall be reviewed and the question be answered how these scientific applications can contribute to make the most of the present systems, and define their future evolution. The conference will be organized as a series of plenary talks and two parallel half-day sessions.
European Union member states began their independent testing of the Public Regulated Service (PRS) broadcast by the four Galileo navigation satellites in orbit. Transmitted on two frequency bands with enhanced protection, PRS offers a highly accurate positioning and timing service, with access strictly restricted to authorized users, such as government defense, security, and emergency services.
PRS access was initially considered for Galileo’s Full Operational Capability phase, but it has been enabled in 2013 in response to the strong interest of member states in this service. To allow early access to PRS during the current phase, the European Commission and ESA began the joint project PRS Participants To IOV (PPTI) in July 2012.
ESA ensured the availability of several tools developed under ESA contracts, including test receivers and other qualification equipment. ESA’s PRS Laboratory, based at the Agency’s ESTEC technical centre in Noordwijk, the Netherlands, provided training, demonstrations and sample data.
“Belgium, France, Italy, and the UK have now performed independent PRS acquisition and positioning tests. In parallel, ESA, through collaboration with Dutch and Italian authorities, is conducting PRS fixed and mobile validation in several locations in the Netherlands and Italy,” said Miguel Manteiga Bautista, head of ESA’s Galileo Security Office.
The PRS tests have demonstrated a current autonomous positioning accuracy of less than 10 meters when in the correct geometrical configuration. This is an impressive result considering the small number of Galileo satellites in orbit and the limited ground infrastructure so far deployed.
Italy has developed its own PRS receiver, and tests have confirmed the feasibility of independent PRS receiver development and verification based on specifications provided by ESA.
“The PPTI project is still ongoing to test more advanced functionalities this coming autumn and to run the first aeronautical PRS tests in collaboration with the Dutch authorities. Other member states have also expressed their willingness to join the IOV PRS experimentation campaigns soon,“ concluded Miguel Manteiga.
The project is a first step to ensure use of the PRS as soon as it becomes operational. It will be complemented by PRS pilot projects, focused on PRS applications, which are currently under definition in a common effort between European agencies.
The United States has submitted a request to be able to use Galileo’s PRS. Other non-EU countries have also expressed a desire to be associated with the program.
PCTEL, Inc. announced the launch of its next generation multi-band GNSS antennas for global timing and precision tracking applications at the ION GNSS Conference being held this week in Nashville, Tennessee.
The new antennas, which are designed for use with GPS, GLONASS, BeiDou, and Galileo systems, are being showcased along with other PCTEL antennas at the PCTEL booth in the Exhibit Hall, Booth 318/320. All models of the new antennas are available for sale.
Equipment providers for carrier network timing, precision agriculture, and global asset tracking applications need a single antenna solution for global deployment. PCTEL’s new GNSS1-TMG-26N and GPS-LB12GL-MAG antennas address global compatibility issues for two of the industry’s most crucial applications.
For critical timing applications for macro and small cell deployments, PCTEL has developed the GNSS1-TMG-26N antenna. The GNSS1-TMG-26N is a fixed mount network timing antenna covering GPS, GLONASS, Beidou, and Galileo system frequencies in one single unit, making it a true global solution.
PCTEL’s GPS-LB12GL-MAG antenna is designed for precision agriculture.
For global precision navigation applications, PCTEL has developed the GPS-LB12GL-MAG to cover GPS L1, GPS L2, GLONASS, and L-BAND constellations. The GPS-LB12GL-MAG’s multi-band coverage addresses the precision market in the USA as well as differential correction signals needed across Europe and Asia.
“PCTEL will meet the GNSS market requirements for our global customers while maintaining PCTEL’s high standards for quality and performance,” said Jeff Miller, president of PCTEL Connected Solutions. “We understand that our products need global compatibility to support our customers around the world. We are proud to showcase our design excellence in this highly technical area,” added Miller.
EU Member States have begun their independent testing of the most accurate and secure signal broadcast by the four Galileo navigation satellites in orbit.
Transmitted on two frequency bands with enhanced protection, the Public Regulated Service (PRS) offers a highly accurate positioning and timing service, with access strictly restricted to authorized users.
“Galileo is in its In-Orbit Validation phase, planned to include experimental demonstrations of PRS capabilities in terms of positioning and access control,” explained Miguel Manteiga Bautista, heading ESA’s Galileo Security Office.
PRS access was initially considered for Galileo’s Full Operational Capability phase, but it has been enabled in 2013 in response to the strong interest of Member States in this service. To allow early access to PRS during the current phase, the European Commission and ESA began the joint project ‘PRS Participants To IOV’ (PPTI) in July 2012.
ESA ensured the availability of several tools developed under ESA contracts, including test receivers and other qualification equipment. ESA also provided the critical knowhow and expertise required to conduct these experimental campaigns.
ESA’s PRS Laboratory, based at the Agency’s ESTEC technical centre in Noordwijk, the Netherlands, was used to provide training, demonstrations and sample data.
“As a result, Belgium, France, Italy and the UK have now performed independent PRS acquisition and positioning tests. In parallel, ESA, through collaboration with Dutch and Italian authorities, is also conducting PRS fixed and mobile validation in several locations in the Netherlands and Italy,” added Miguel Manteiga.
The PRS tests have demonstrated a current autonomous positioning accuracy below 10 m when in the correct geometrical configuration. This is an impressive result considering the small number of Galileo satellites in orbit and the limited ground infrastructure so far deployed.
In the case of Italy, which has developed its own PRS receiver, the tests have already confirmed the feasibility of independent PRS receiver development and verification based on specifications provided by the Eurpoean Space Agency (ESA).
ESA’s new Telecommunications and Navigation Testbed Vehicle, a mobile test platform to support test campaigns for navigation and telecommunications services, most notably Europe’s Galileo constellation.
“But the PPTI project is still ongoing in order to test more advanced functionalities this coming autumn and to run the first aeronautical PRS tests in collaboration with the Dutch authorities. Other Member States have also expressed their willingness to join the IOV PRS experimentation campaigns soon,“ concluded Miguel Manteiga.
The project is the first step to ensure the use of the PRS service as soon as it is operational. It will be complemented by the PRS Pilot Projects, focused on PRS applications, which are currently under definition in a common effort between the EU Member States, the European Commission, ESA and the European Global Navigation Satellite System Agency.
In addition to the qualification of the PRS service, these initiatives will allow the timely availability of competitive PRS receivers in Europe and the setting up of organizations in the Member States required to handle PRS, ESA said.
By Richard Langley, Steffen Thoelert, and Michael Meurer
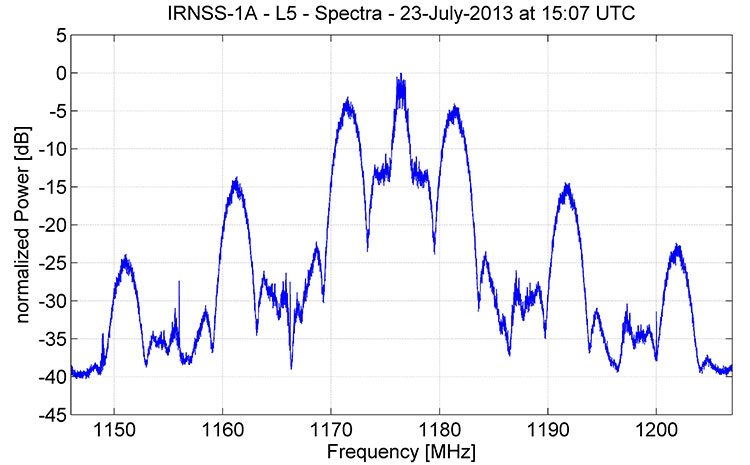
The spectrum of signals from IRNSS-1A, the first satellite in the Indian Regional Navigation Satellite System, as recorded by German Aerospace Center researchers in late July, appears to be consistent with a combination of BPSK(1) and BOC(5,2) modulation.
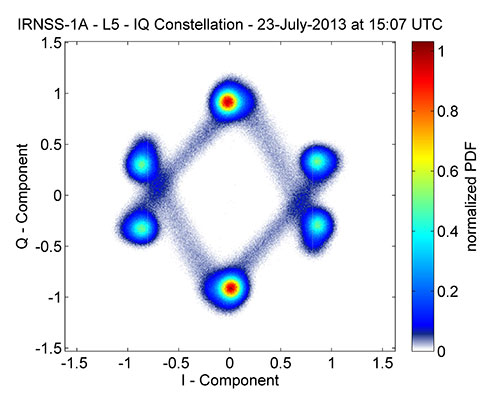
Figure 1 shows that, centered at 1176.45 MHz, the signal has a single symmetrical main lobe and a number of side lobes characteristic of the signal structure that the Indian Space Research Organization (ISRO) announced would be used for IRNSS transmissions in the L-band. Figure 2 shows the corresponding IQ constellation diagram. Further analysis will be required to sleuth additional signal details as ISRO, so far, has not publicly released an IRNSS interface control document describing the signal structure in detail.
Figure 1. Spectrum of IRNSS-1A L5 signal.Figure 2. IQ constellation diagram of IRNSS-1A L5 signal.
The German scientists caution that “this is a very early snapshot of the current signal transmission and probably both the signal power and the signal quality will change and possibly improve during the in-orbit-testing phase of the satellite’s operation.
Extra Life for IIRs, IIR-Ms
U.S. Air Force engineers are testing on-orbit a technique to extend the life of the 19 GPS IIR and IIR-M satellites on orbit, roughly 60 percent of the current contellation.
A new charging method may reduce the rate of satellite battery degradation, thereby extending satellite operational life. If the technique passes the test, the initiative could add a combined 20 years to the life of the satellites — saving the Air Force tens of millions of dollars in the process.
Gen. William Shelton, commander of Air Force Space Command, credits Capt. Jacob Hempen of the Air Force’s 2nd Space Operations Squadron for the job. Capt. Hempen says in turn that Warren Hwang of the Aerospace Corporation originated the idea.
When satellite solar panels are directly exposed to the Sun, they charge satellite batteries while continuing to power other operations onboard the space vehicle. When the satellite passes into the Sun’s shadow behind the Earth, it runs on batteries. The batteries can be re- charged at variable rates. When some of the batteries are powered above a certain rate threshold, they can overheat, accelerating their natural rate of decay.
Lowering battery charging rates could still enable the satellites to perform well while minimizing the rate of degradation. Hitting the optimum number called for some finely-honed calculations.
The satellites were built by Lockheed Martin Space Systems, and the oldest still in operation was launched in 1997.
They had an intial design life of eight years, which many have now well outlasted. If the technique proves out and is carefully applied across the board, it could conceivably fill in replenishment gaps equivalent more than two additional spacecraft — conceivably as much hundreds of millions of dollars in build and launch costs, postponed. In today’s budget environment, a postponement can be construed as equivalent to outright savings.
System Briefs
GLONASS Partial Make-Good. Russia will launch two GLONASS satellites later this year to make up for the loss of three satellites in the July 2 Proton rocket explosion. The first is scheduled for the beginning of September, and the second at the end of October. Both will rise aboard Soyuz carrier rockets, which have proven more reliable than the Protons. A constellation of 29 GLONASS satellites is now in orbit, with 24 spacecraft in operation, three spares, one in maintenance, and one in test flight phase.
Meanwhile, plans to reduce GLONASS funding have alarmed at least some deputies of the Duma, the Russian state legislative body. Government officials have floated a plan to reduce funding of the space program in 2014 by 11.7 billion rubles ($355 million), by 13.5 billion rubles in 2015, and by 40 billion rubles in 2016. The federal space program of Russia for 2006-2015 already lacks 10.5 billion rubles funding, and this year there has been a 2.3-billion-ruble additional reduction in R&D. A Duma committee chairperson warned that this trend will “lead to the loss of confidence of the international community in the GLONASS system and, consequently, to a reduction in its use globally. Russia will lose a strategic global instrument of political and economic prestige.” The Duma has recommended that the government maintain funding of federal space programs.
Galileo Satellites’ Trial By Noise. The first Galileo Full Operational Capability (FOC) satellite successfully completed acoustic testing in July, part of a full-scale test campaign at ESA’s ESTEC Test Centre in Noordwijk, the Netherlands.
The satellite was placed in the Large European Acoustic Facility (LEAF), effectively the largest sound system in Europe. A quartet of noise horns embedded in a wall of the 11 x 9 x 16.4 meter test chamber generated an acoustic noise level of 140.7 decibels, about the same noise as standing 25 meters from a jet taking off, and intended to simulate the extreme environment experienced by a satellite atop a rocket about to fire itself off the launch pad.
A second FOC satellite arrived at ESTEC on 9 August from manufacturer OHB in Bremen, Germany. It will undergo a similar acoustic testing and then a System Compatibility Test Campaign will linking it with the Galileo Control Centres in Germany and Italy and ground user receivers as if it were already in orbit.
A total of 14 FOC satellites are being produced and then tested at ESTEC as an integral part of their path to orbit. A second work order of eight satellites has been given to OHB.
GPS III Pathfinder. On July 19, Lockheed Martin delivered a full-sized, functional prototype of the next-generation GPS satellite to Cape Canaveral Air Force Station to test facilities and pre-launch processes in advance of the arrival of the first GPS III flight satellite.
The GPS III Non-Flight Satellite Testbed (GNST) paves the way for the first flight GPS III satellite, expected to arrive at the Cape in 2014, ready for launch by in 2015.
An innovative investment by the Air Force under the original GPS III development contract, the GNST has helped to identify and resolve development issues prior to integration and test of the first GPS III flight space vehicle (SV-01).
Following the Air Force’s rigorous “back-to-basics” acquisition approach, the GNST has gone through the development, test and production process for the GPS III program first, significantly reducing risk for the flight vehicles, improving production predictability, increasing mission assurance and lowering overall program costs.
Lockheed Martin is currently under contract for production of the first four GPS III satellites (SV 01–04), and has received advanced procurement funding for long-lead components for the fifth, sixth, seventh and eighth satellites (SV 05–08).
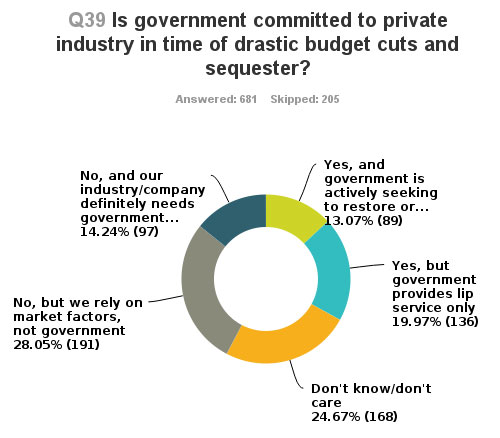
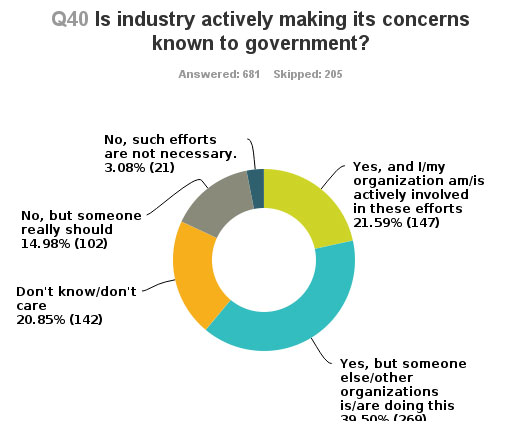
GNSS Industry Survey. Here are the results of two questions asked about government and industry from the 2013 GNSS STATE OF THE INDUSTRY SURVEY.
Is government committed to private industry in a time of drastic budget cuts?Is industry actively making its concerns known to government?
By Steffen Thoelert, Johann Furthner, and Michael Meurer
Future positioning and navigation applications of modernizing and newly established GNSSs will require a higher degree of signal accuracy and precision. Thus, rigorous and detailed analysis of the signal quality of recently launched satellites, including the discovery of any possible imperfections in their performance, will have important implications for future users.
Global navigation satellite systems achieved amazing progress in 2012, with major milestones reached by the various navigation and augmentation systems, bringing new satellites and satellite generations into orbit. Since the complexity of the satellites and also the requirements for a precise and robust navigation increase consistently, all of the newly available signals of the existing or emerging navigation satellite systems must be analyzed in detail to characterize their performance and imperfections, as well as to predict possible consequences for user receivers.
Since the signals are well below the noise floor, we use a specifically developed GNSS monitoring facility to characterize the signals. The core element of this monitoring facility is a 30-meter high-gain antenna at the German Aerospace Center (DLR) in Weilheim that raises GNSS signals well above the noise floor, permitting detailed analysis. In the course of this analysis, we found differences in the signal quality in the various generations of the Chinese navigation satellite system BeiDou, differences which influence the navigation performance.
This article gives an overview of new navigation satellites in orbit. For selected satellites, a first signal analysis reveals important characteristics of these signals. The data acquisition of these space vehicles was performed shortly after the start of their signal transmission to get a first hint about the quality and behavior of the satellites.
For more detailed analysis, these measurements should be repeated after the satellites become operational. Then the acquired high-gain antenna raw data in combination with a precise calibration could be used for a wider range of analyses: signal power, spectra, constellation diagrams, sample analysis, correlation functions, and codes to detect anomalies and assess the signal quality and consequently the impact at the user performance.
Measurement Facility
In the early 1970s, DLR built a 30-meter dish (Figure 1) for the HELIOS-A/B satellite mission at the DLR site Weilheim. These satellite missions were the first U.S./German interplanetary project. The two German-built space probes, HELIOS 1 (December 1974–March 1986) and HELIOS 2 (January 1976–January 1981), approached the Sun closer than the planet Mercury and closer than any space probe ever. Later, the antenna supported space missions Giotto, AMPTE, Equator-S, and other scientific experiments.
Figure 1. 30-meter high-gain antenna.
In 2005, the Institute of Communications and Navigation of the DLR established an independent monitoring station for analysis of GNSS signals. The 30-meter antenna was adapted with a newly developed broadband circular polarized feed. During preparation for the GIOVE-B in-orbit validation campaign in 2008, a new receiving chain including a new calibration system was installed at the antenna. Based on successful campaigns and new satellite of modernizing GPS and GLONASS, and GNSSs under construction — Galileo and COMPASS — the facility was renewed and updated again in 2011/2012.
This renewal included not only an upgrade of the measurement system itself, but also refurbishment of parts of the high-gain antenna were refurbished.
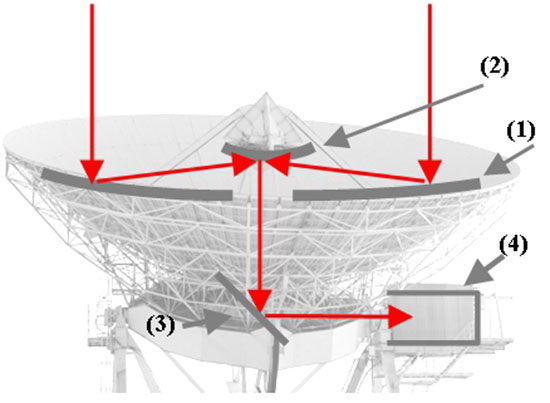
The antenna is a shaped Cassegrain system with an elevation over azimuth mount. The antenna has a parabolic reflector of 30 meters in diameter and a hyperbolic sub-reflector with a diameter of 4 meters. A significant benefit of this antenna is the direct access to the feed, which is located within an adjacent cabin (Figure 2). The L-band gain of this high-gain antenna is around 50 dB, the beam width is less than 0.5°. The position accuracy in azimuth and elevation direction is 0.001°. The maximum rotational speed of the whole antenna is 1.5°/second in azimuth and 1.0°/second in elevation direction.
Figure 2. The shaped Cassegrain system: (1) parabolic reflector of 30 m diameter; (2) hyperbolic sub- reflector with a diameter of 4 meter; (3) sub-reflector; (4) Cabin with feeder and measurement equipment.
Measurement Set-up
The antenna offers another significant advantage in the possibility to have very short electrical and high-frequency connection between the L-band feeder and the measurement equipment. As mentioned earlier, the challenge for future GNSS applications is the high accuracy of the navigation solution. Therefore, it is necessary to measure and then analyze the signals very accurately and precisely. To achieve an uncertainty of less than 1 dB for the measurement results required a complete redesign of the setup, which consists of two main parts:
paths for signal receiving and acquiring the measurement data;
calibration elements for different calibration issues.
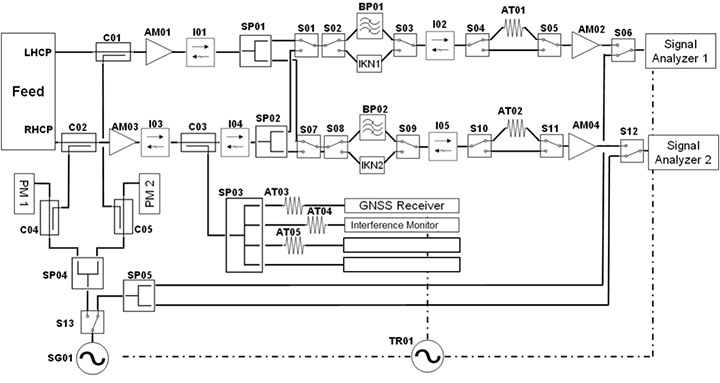
The path for receiving the signal and acquiring the measurement data consists of two signal chains, each equipped with two low-noise amplifiers (LNAs) with a total gain of around 70 dB, a set of filters for the individual GNSS navigation frequency bands, and isolators to suppress reflections in the measurement system. With this setup it is possible to measure right-hand circular polarized (RHCP) and left-hand circular polarized (LHCP) signals in parallel.
This provides the capability to perform axial ratio analysis of the satellite signal, and consequently an assessment of the antenna of the satellite. Using the switches SP01 and SP02, the measurement system is also able to acquire data from two different bands at the same time. This enabless investigations concerning the coherence between the signals in post-processing.
The signals are measured and recorded using two real-time vector signal analyzers with up to 120 MHz signal bandwidth. Both analyzers are connected to a computer capable of post-processing and storing the data. Additional equipment like digitizers or receivers can be connected to the system using the splitter III outputs, where the unfiltered RHCP signals are coupled out after the first LNA. A high-performance rubidium clock is used as reference signal for the whole measurement equipment. In front of the first LNA of each chain, a signal can be coupled in for calibration issues.
Control Software. Due to the distance of the antenna location from the Institute at Oberpfaffenhofen (around 40 kilometers) it was necessary to perform all measurement and calibration procedures during a measurement campaign via remote control. A software tool was developed which can control any component of the setup remotely. In addition, this software can perform a complete autonomous operation of the whole system by a free pre-definable sequence over any period of time. This includes, for example, the selection of the different band-pass filters, the polarization output of the feed, and the control of the calibration routines.
After the measurement sequence, the system automatically copies all data via LAN onto the processing facility, starts basic analysis based on spectral data, and generates a report. Sophisticated analysis based on IQ raw data is performed manually at this time.
Absolute Calibration
To fulfill the challenge of highly accurate measurements, it is necessary to completely characterize all elements of the measurement system, which comprises the antenna itself and the measurement system within the cabin after the feed. An absolutely necessary precondition of the calibration of the high-gain antenna is a very accurate pointing capability. The pointing error should be less than 0.01° concerning antennas of this diameter.
Furthermore, it is important to check long-term stability of these characterizations and the influences of different interference types and other possible error sources. This has to be taken in to account, when it comes to a point where the value of the absolute calibration has the same range as the summed measurement uncertainties of the equipment in use.
Antenna Calibration. High-accuracy measurements require not only the correct antenna alignment but also accurate power calibration of the antenna. To determine the antenna gain, well known reference sources are needed. These could be natural sources like radio stars or artificial sources like geostationary satellites.
Standard reference signal sources for the calibration of high-gain antennas are the radio sources Cassiopeia A, Cygnus, and Taurus. All these radio sources are circumpolar relative to our ground station, and therefore usable for calibrations at all times of the year. A further advantage of these calibration sources is the wide frequency range of the emitted signals. Thus, contrary to other signal sources (like ARTEMIS satellite L band pilot signal) the antenna gain can be calibrated in a wide bandwidth. With the help of the well-known flux density of the celestial radio sources and using the Y-method, the relation between the gain of the antenna and the noise temperature of the receiving system, or G/T, can be measured. Measuring the noise figure of the receiving system, the antenna gain can finally be calculated.
System Calibration. The measurement system calibration behind the feed is performed using wideband chirp signals. The chirp is injected into the signal chains via coupler I and II (Figure 3). The calibration signal is captured by the two vector signal analyzers. In the next step, the signal is linked via the switches directly to the analyzers, and the chirp signals are recorded as reference again. It has to be taken into account that more elements are in the loop during the chirp recordings compared to the receiving chain. These are the link between the signal generator and the couplers and the direct path to the analyzers.
Figure 3. Measurement setup overview.
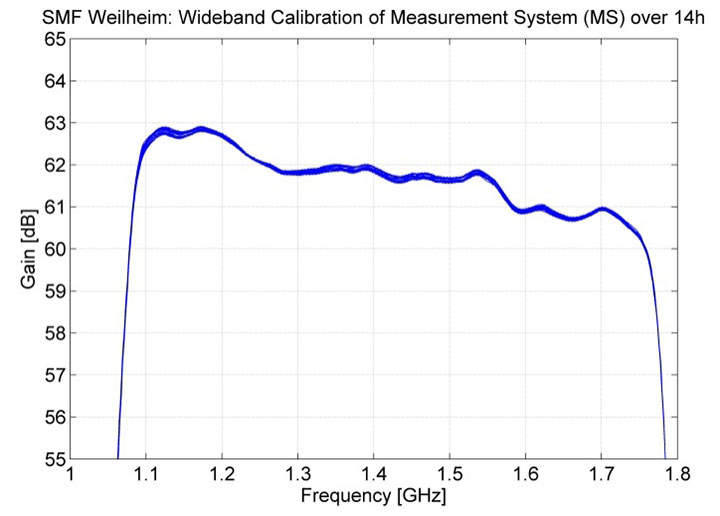
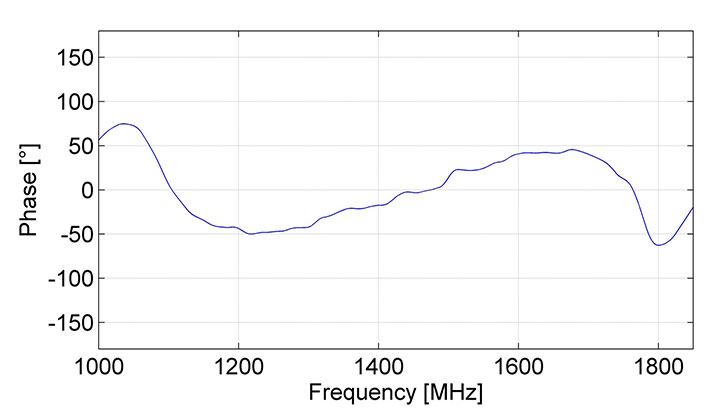
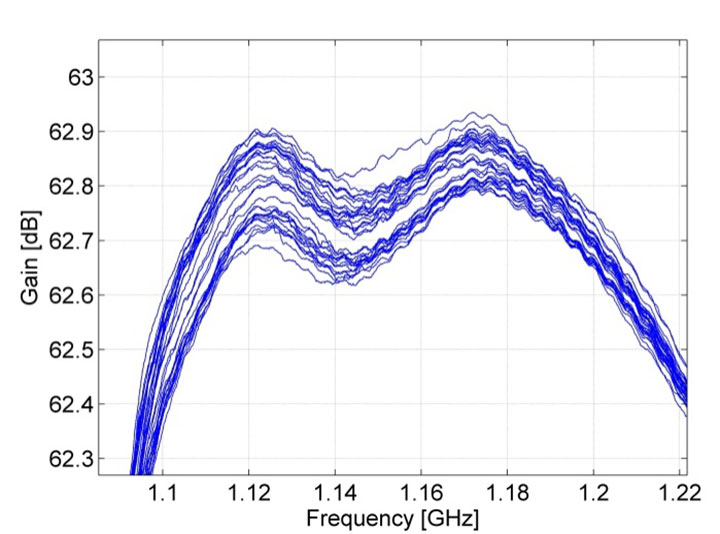
To separate the receiving chain from the additional elements within the wideband calibration loop, two more measurements are needed. The injection path from the signal generator to the couplers and the direct paths are characterized by network analyzer (NWA) measurements. Based on the chirp and NWA measurements, the transfer function of the system is calculated to derive the gain and phase information. To determine the calibration curve over the frequency range from 1.0 GHz to 1.8 GHz, a set of overlaying chirps with different center frequencies is injected into the signal paths and combined within the analysis. Figure 4 and Figure 5 show the results of the wideband calibration of gain and phase.
Figure 4. Gain of the measurement system after the feed over 14 hours.Figure 5. Phase of measurement system.
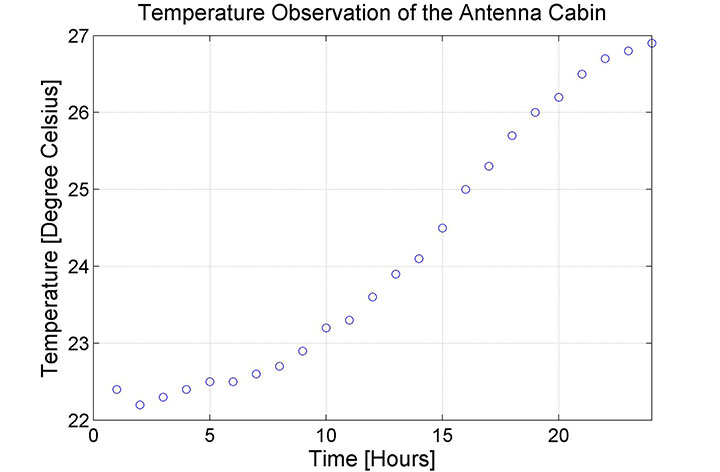
Is it enough to determine the gain only once? If we assume that there is no aging effect of the elements, and the ambient conditions like temperature are constant, the gain should not change. In reality the behavior of the system is not constant. Figure 6 shows the temperature within the cabin during a failure of its air conditioning system. Figure 7 shows the corresponding gain of the measurement system during the temperature change in the cabin of about 5° Celsius. Clearly, it can be seen that the gain changed around 0.2 dB.
Figure 6. Cabin temperature increase during outage of the air condition concerning measurements shown in Figure 7.Figure 7. Gain variations of the measurement system based on temperature variations in the cabin (see Figure 6).
This example shows the sensitivity of the system to changes in environmental conditions. Usually the measurement system is temperature-stabilized and controlled, and the system will not change during data acquisition. But every control system can be broken, or an element changes its behavior. For this reason, the calibration is performed at least at the beginning and at the end of a satellite path (maximum 8 hours).
Measurement Results
Here we present selected results from the European Galileo and the Chinese BeiDou navigation systems.
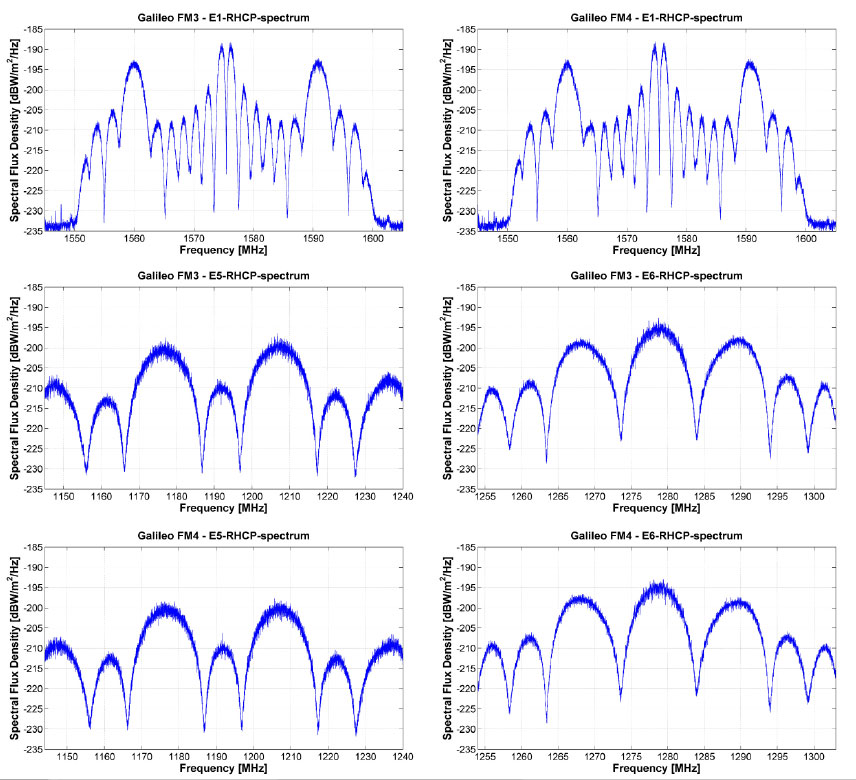
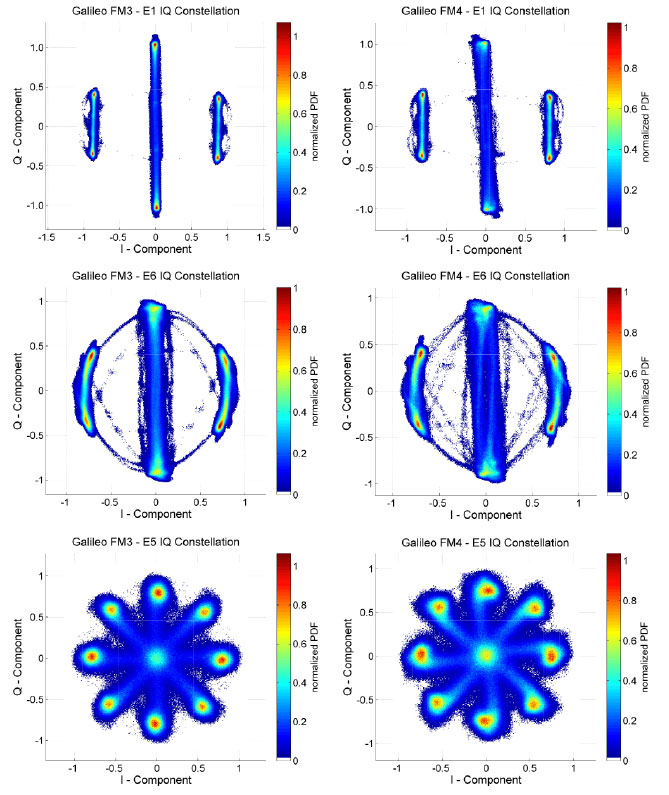
Galileo FM3 and FM4. In October 2012, the third and fourth operational Galileo satellites, FM3 and FM4, were launched into orbit. Signal transmissions started in November and in December, respectively. Both satellites provide fully operational signals on all three frequency bands, E1, E5, and E6. The measurement data of both satellites were captured in December 2012, shortly after the beginning of the signal transmission. Figure 8 shows the spectra of both satellites for El, E5, and E6 bands. The quality of the transmitted signals seems to be good, but for the El signal of FM4 satellite, minor deformations of the spectra are visible.
Figure 8. Measurement results of Galileo IOV FM3 & FM4: El, E5 and E6 spectra.
Figure 9 shows the results of the IQ constellations both for FM3 and FM4 concerning each transmitted signal band. The constellations and consequently the modulation quality of each signal are nearly perfect for the FM3 satellite. The IQ constellation diagrams of FM4 show minor deformations in each band. What impact these imperfections create for future users has yet to be analyzed. Both satellites were at the time of measurement campaign still in the in-orbit test phase and did not transmit the final CBOC signal in the E1 band. It could be expected that especially the signals of the FM4 will be adjusted to become more perfect.
Figure 9 Measurement results of Galileo IOV FM3 & FM4: E1, E5, and E6 – IQ Constellation.
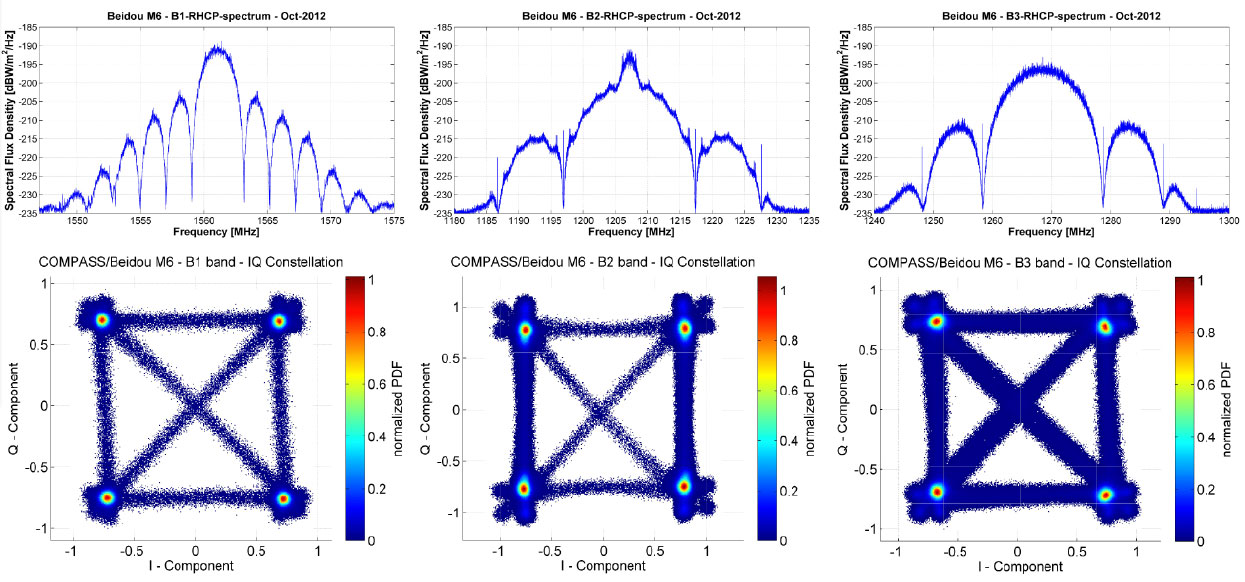
BeiDou M6. BeiDou satellites transmit navigation signals in three different frequency bands, all are located adjacent to or even inside currently employed GPS or Galileo frequency bands. The center frequencies are for the B1 band 1561.1 MHz, B3 band 1268.52 MHz, and B2 band 1207.14 MHz.
In 2012, China launched six satellites: two inclined geostationary space vehicles and four medium-Earth orbit ones, concluding in September (M5 and M6) and October 2012 (IGSO6). There have been further BeiDou launches in 2013, but these satellites’ signals are not analyzed here.
Figure 10 displays calibrated measurement results from the Beidou M6 satellite. The spectra of the B2 and B3 band of the Beidou M6 satellite are clean and show no major deformation. Within the B1 spectra, some spurious results, especially on top of the side lobes, are obvious. This behavior has to be investigated more in detail to determine their origin. The IQ diagrams, which visualize the modulation quality, show also no major deformation. Only within the B3 signal, a marginal compression of the constellation points can be seen, which points to a large-signal operation at the beginning of the saturation of the amplifier of the satellite.
Figure 10. BeiDou M6 satellite signal spectra and IQ constellations at B1, B2 and B3 band
Conclusion
Reviewing the quality of the presented measurements, signal analysis, and verification on GNSS satellites, the use of the 30-meter high-gain antenna offers excellent possibilities and results. Regarding the calibration measurements of the antenna gain and measurement system, the variances are in the range of measurement uncertainty of the equipment.
The sensitivity of the measurement system concerning ambient conditions was exemplarily shown based on the gain drift caused by a temperature drift. But the solution is simple: stabilize the ambient conditions or perform calibration in a short regular cycle to detect changes within the system behavior to be able to correct them.
Based on this absolute calibration, a first impression of the signal quality of Galileo FM3 and FM4 and the BeiDou M6 satellites were presented using spectral plots and IQ diagrams. Only minor distortion could be detected within the Galileo FM4 and Beidou M6 signal; these distortions may be negligible for most users. Concerning FM4 and FM3, both satellites were in the in-orbit test phase during the data acquisition. The signal quality may have been changed during their stabilization process in orbit, or the signals have been adjusted in the meantime. Thus, it would be interesting and worthwhile to repeat the measurements and perform detailed analysis to assess the final satellite quality and consequently the user performance.
Acknowledgments
The authors wish to thank the German Space Operation Centre for the opportunity to use the high-gain antenna. The support of colleagues at the DLR ground station Weilheim for the operational and maintenance service over recent years is highly appreciated. This work was partly performed within the project “Galileo SEIOT (50 NA 1005)” of the German Space Agency, funded by the Federal Ministry of Economics and Technology and based on a resolution by the German Bundestag. Finally, the support of DLR’s Centre of Excellence for Satellite Navigation is highly appreciated.
This article is based on the paper “GNSS Survey – Signal Quality Assessment of the Latest GNSS Satellites” presented at The Institute of Navigation International Technical Meeting 2013, held in San Diego, California, January 28–30, 2013.
Steffen Thoelert received his diploma degree in electrical engineering at the University of Magdeburg. He works in the Department of Navigation at German Aerospace Centre (DLR), on signal quality assessment, calibration, and automation of technical processes.
Johann Furthner received his Ph.D. in laser physics at the University of Regensburg. He works in the DLR Institute of Communication and Navigation on the development of navigation systems in a number of areas (systems simulation, timing aspects, GNSS analysis, signal verification, calibration processes).
Michael Meurer received a Ph.D. in electrical engineering from the University of Kaiserslautern, where he is now an associate professor, as well as director of the Department of Navigation at DLR.
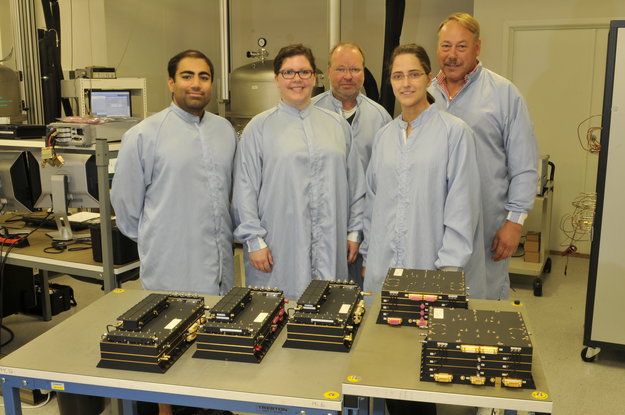
Galileo hardware ready for delivery. The last three Search and Rescue Transponders (SARTs), left, and the last two Frequency Generator and Upconverter Units (FGUUs), right, units produced by Kongsberg Norspace under the first work order for the first 14 Galileo Full Operational Configuration (FOC) satellites being prepared for shipment to Surrey Satellite Technology Ltd, seen together with some of the key project team members.
A trans-European production line is progressively transforming the Galileo satnav system into a working reality, according to the European Space Agency (ESA). The 22 satellites so far contracted to join the four already in orbit are having their payloads manufactured at Surrey Satellite Technology Ltd. in the UK, which are then integrated to their satellite platforms at OHB in Germany. Finally, each complete satellite is tested at ESTEC in the Netherlands for launch from Europe’s Spaceport in French Guiana.This main manufacturing process is fed by smaller but no less crucial production lines all across the continent, run by specialized companies supplying essential building blocks to Galileo’s prime contractors, ESA said.
The old Norwegian naval town of Horten, just south of Oslo, is home to Kongsberg Norspace, a 95-strong company contributing two key elements to these next 22 Galileo Full Operational Capability satellites.
“We won the contracts to supply the Frequency Generator and Upconverter Units (FGUUs) and Search and Rescue Transponders (SARTs) for all the Galileo FOC satellites,” explains Sverre Bisgaard, CEO of Kongsberg Norspace.
The shoebox-sized Frequency Generator and Upconverter Units (FGUU) is a pivotal item of equipment that takes the outputs of the satellite’s adjacent Navigation Signal Generator Unit and converts them into L-band signals across Galileo’s three spectral bands. It is these signals that end up guiding Galileo users through their receivers.
The shoebox-sized FGUU is a pivotal item of equipment, effectively giving Galileo its voice. “It takes the outputs of the satellite’s adjacent Navigation Signal Generator Unit and converts them into L-band signals across Galileo’s three spectral bands. It is these signals that end up guiding Galileo users through their receivers,” Bisgaard said.
“These signals end up being very low power by the time they reach the ground, so maintaining the signal quality is key, in terms of power range, frequency shape and low noise. The FGUU actually relies on Galileo’s atomic clocks to keep accurately locked on its set frequency. It also actively determines which of the clocks and other redundant subsystems it should employ at any one time for optimal operations,” Bisgaard said.
Kongsberg Norspace’s second, similarly sized contribution is the SART, which picks up emergency distress calls from the ground or sea and relays them to the nearest rescue centre, while also sending a return-link message that help is on the way. Galileo’s search and rescue capability marks a significant enlargement of the international Cospas–Sarsat system, which has been active for more than three decades and rescued thousands of lives.
The company won the SART contract having previously supplied similar transponders to ESA’s Meteosat Second Generation satellites.
“The SART’s job as a transponder is just to relay messages, theoretically a simple task but requiring clever design to make it work,” adds Mr Bisgaard. “The SART is operating across noisy frequencies, and has to recognise, filter and amplify the very weak messages in question without missing anything.
“So both FGUU and SART have a need for effective filtering in common, to ensure that they are processing the right frequencies with the right signal shape without any garbling. This filtering is performed physically, based on ‘Surface Acoustic Wave’ (SAW) technology.
“SAW makes use of the physical effect called ‘piezoelectricity’ – if an electrical field is applied to quartz it is converted to a mechanical or acoustic wave. By converting our electrical signal in this way then converting it back again the signal can be filtered and shaped as desired. This is one of our key technologies and in fact ESA recognises us as a preferred supplier for SAW systems.”
While the FGUU has embedded redundancy and the SART is a non-redundant unit, one of each design is being supplied for each Galileo satellite, a total of 44. Batch production is a shift from how the space industry traditionally operated, with bespoke designs for each individual satellite, but Kongsberg Norspace has had a lot of experience working in such a way.
“We’ve had similar series contracts in the past, for instance contributing 48 identical units to five satellites of the Russian Express-AM series and up to 12 units per satellite for the 64-satellite Globalstar low-Earth orbit telecom constellation.
“We’ve already delivered units to SSTL for the first 14 satellites, which was the first contract won, with the next eight in production. It is SSTL who set the technical requirements and give us information on the interfaces with the other items of equipment, such as the clocks and navigation signal generator unit. We deliver directly to SSTL where the integration is performed.”
Norspace has been doing business for just under three decades, originally formed as a subsidiary of another company before being spun out. In 1986 it won its first ESA contract, supplying systems for the Agency’s ERS-1 remote sensing missions, subsequently diversifying into the US telecommunications market under the ownership of Alcatel.
A decade ago a management takeover took place, with the company bought by Kongsberg in 2011. Upwards of 150 satellites rely on hardware supplied by the company.
“Telecom missions remain an important part of our business, but Galileo is becoming more important – it represented 40% of our sales during the last couple of years.
“We have been involved with Galileo since the start, supplying equipment for the initial testbed systems, then the GIOVE-A and -B test satellites and the initial In-Orbit Validation quartet of satellites. We hope to maintain our involvement into the future as Galileo evolves, so we are discussing about joining with primes to prepare for future bids.
Telit Wireless Solutions has been selected among various applicant members of the Italian Technology Industry as one of the nation’s key representatives in the global roll-out of Europe’s Galileo satellite positioning system. The selection reflects the high degree of credibility demonstrated by the Italian government in the strategic plan proposed by Telit to accelerate global adoption of the Galileo technology, Telit said.
Telit is a global enabler of machine-to-machine (M2M) communications providing cellular, short range and positioning module products. Telit’s positioning technology R&D center is an integral part of the company’s R&D function headquartered in Trieste, Italy.
Telit also received a grant to execute its proposed strategic plan. The grant offers Telit the opportunity to accelerate its activities in development of projects for the positioning technology market. It bolsters human and financial resources required to enable Telit to quickly advance in this market area and achieve leadership in product performance with services to match. This achievement is likely not only to enhance the company’s competitiveness but is also provide measurable boost for the Italian economy, concretely contributing tangible progress in the strategic and very high growth segment of m2m.
The inclusion of positioning expertise stems from the company’s mergers and acquisitions over the past few years, which have made it a leading designer and manufacturer of innovative GNSS solutions for OEM applications, from personal and asset tracking to automotive solutions. Telit has sold millions of high-performance GPS modules sold worldwide.
Galileo is Europe’s global navigation satellite system, designed to provide a highly accurate, guaranteed global positioning service under civilian control. It is inter-operable with GPS and GLONASS, the U.S. and Russian global satellite navigation systems. By offering dual frequencies as standard, Galileo delivers real-time positioning accuracy down to the meter range. It ensures availability of the service under all but the most extreme circumstances and informs users within seconds of any satellite failure, making it suitable for safety-critical applications such as guiding cars, running trains and landing aircraft. A range of services will be extended as the system is built up from initial operational capacity (IOC) to reach the Full Operational Capability (FOC) by this decade’s end. The fully deployed Galileo system consists of 30 satellites (27 operational + 3 active spares), positioned in three circular Medium Earth Orbit (MEO) planes at 23 222 km altitude above the Earth, and at an inclination of the orbital planes of 56 degrees to the equator.
“Achievement of a leading position in now in Galileo technology not only boosts Telit’s global stance and strength, and consequently that of the Italian technology industry but also extends the reach of our leadership in positioning which already includes two decades of pioneering work in GPS in the United States,” said Dominikus Hierl, chief marketing officer at Telit Wireless Solutions. “The planned work-force expansions in support of this new effort will create extraordinary value-add, not only in terms of project acceleration but also in innovation, vision and new relationships for Telit.”