Representatives of the GPS industry presented to members of the Federal Communications Commission (FCC) laboratory evidence of interference with the GPS signal by a proposed new broadcaster on January 19 of this year. The meeting and subsequent filing did not dissuade FCC International Bureau Chief Mindel De La Torre from authorizing Lightquared to proceed with ancillary terrestrial component operations, installing up to 40,000 high-power transmitters close to the GPS frequency, across the United States.
The document describing the testing states that the Lightsquared initiative “will have a severe impact on the GPS band” and “will create a disastrous interference problem for GPS receiver operation to the point where GPS receivers will cease to operate (complete loss of fix) when in the vicinity of these transmitters.”
On January 26, the FCC waived its own rules and granted permission for the potential interferer to broadcast in the L Band 1 (1525 MHz–1559 MHz) from powerful land-based transmitters. This band lies adjacent to the band (1559–1610 MHz) where GPS and other GNSSs operate.
The FCC called for further testing to be led by LightSquared and completed by June 15.
Prior to the decision, representatives of the U.S. GPS Industry Council and GPS manufacturers Garmin and Trimble presented “Experimental Evidence of Wide Area GPS Jamming That Will Result from LightSquared’s Proposal to Convert Portions of L Band 1 to High Power Terrestrial Broadband,” to five members of the FCC’s Office of Engineering and Technology, including its chief, two members of the FCC International Bureau, one from the Public Safety and Homeland Security Bureau, and two from the Wireless Telecommunications Bureau.
The document conveys results of testing on a common portable consumer automotive navigation device and on a common general aviation receiver. The consumer GPS device began to be jammed at a power level representing a distance of 3.6 miles (5.8 kilometers) from the simulated LightSquared transmitter. The consumer device lost a fix at 0.66 miles (1.1 kilometers) from the transmitter.
The Federal Aviation Administration (FAA)-certified aviation receiver began to be jammed at a distance of 13.8 miles (22.1 kilometers) and experienced total loss of fix at 5.6 miles (9.0 kilometers) from the transmitter.
During the laboratory testing, GPS signals were simulated by a Spirent GSS6560 GPS simulator, representing a constellation of 31 GPS satellites, the current configuration. LightSquared’s signal was simulated using a Rhode and Schwartz SMIQ-03S signal generator with digital modulation, amplified to achieve the relevant signal strengths. Full technical specifications and parameters are described in the Experimental Evidence document linked above.
The industry report concludes: “The proposed LightSquared plan . . . will deny GPS service over vast areas of the United States.”
In its decision document on January 26, the FCC not only authorized LightSquared to proceed, it turned up its nose at assertions that the entire process had been conducted in near-stealth mode as well as on an accelerated track.
LightSquared was established in mid-2010 by “an experienced team of global telecommunications executives and investors.” From 2001 to 2005, Lightsquared executive vice president Jeff Carlisle served as deputy chief and then chief of the FCC’s Wireline Competition Bureau.
The Galileo Test and Development Environment (GATE) in Berchtesgaden, Germany, officially opened on February 4. The system operator, IFEN GmbH of Poing, Germany, jointly with the German Federal Minister of Transport, Building and Urban Development, announced the opening for use by commercial and organizational entities seeking to test equipment with the coming Galileo signals. GATE was developed on behalf of the German Aerospace Center (DLR) with funding by the German Federal Ministry of Economics and Technology.
The test area extends across a valley of approximately 65 square kilometers, southeast of Munich, where antennae atop surrounding peaks broadcast the various Galileo signals. Technical details and specifications of the test environment are at www.gate-testbed.com.
The GATE infrastructure is capable of transmitting the Galileo Open Service, the Safety-of-Life Service (functional, with certification as a next step), the Commercial Service, and a Public Regulated Service dummy signal.
The GATE system upgrade has been further extended to also support user integrity testing, simulating simple alarm-triggering events on the system/satellite level, supporting GPS and GATE/Galileo dual-constellation receiver-autonomous integrity monitoring (RAIM), individual user integrity test scenarios, and tests of receivers with different RAIM functionalities.
Next-Generation GLONASS
As this magazine goes to press, a Soyuz rocket carring a new GLONASS-K1 satellite has moved to the Plesetsk Cosmodrome launch pad for a scheduled blast-off on February 24. Assuming all goes well, the satellite’s eventual transmissions will include Russia’s new CDMA signal on a GLONASS L3 frequency. Further information and photos will be posted to env-gpsworld-integration.kinsta.cloud/glonassk.
In Other Developments. Roscosmos, the Russian space agency, said it lost contact with a military satellite launched on February 1, a painful incident following the failed launch of three GLONASS-M satellites in December.
The Geo-IK-2 satellite, designed for geodetic studies, remains in its transfer orbit because the upper stage failed to restart for its second circularizing burn. Based on the GLONASS-M bus, Geo-IK-2 carries laser reflectors, GPS/GLONASS receiving equipment, and an altimeter. Communications with the satellite have been re-established but it is not clear how useful it will be in its current orbit.
Galileo IOV August Launch
The European Space Agency announced that the first two Galileo in-orbit validation (IOV) satellites will rise on August 31. They will ride aboard a Soyuz-ST-B rocket from the Kouros, French Guiana, Space Center. There was no word about the third and fourth IOV satellites, which had at one point been scheduled for an October launch, at a time when the first two were penciled for a June launch.
JAVAD Receivers Track Compass B1 Signal
JAVAD GNSS has announced that, with modified firmware, all of the company’s receivers can now track the Chinese Compass B1 signal. The company states that Compass is the sixth GNSS system that its receivers can track, joining GPS, GLONASS, Galileo (the two GIOVE in-orbit validation experimental satellites), SBAS (the European Geostationary Navigation Overlay Service or EGNOS), and Japan’s Quasi-Zenith Satellite System (QZSS).
JAVAD GNSS made available several plots, shown here. One is a log file, collected on JAVAD’s TR_G3TH board in Moscow during the last weekend in January, reporting up to 26 satellites from the various systems, locked simultaneously. Also provided below are several other plots showing the new capability.
The company further stated that it will add Compass tracking to almost all receivers in near future, as a firmware upgrade.
The Galileo Test and Development Environment (GATE) in Berchtesgaden, Germany, officially opened on February 4. The system operator, IFEN GmbH of Poing, Germany, jointly with the German Federal Minister of Transport, Building and Urban Development, announced the opening for use by commercial and organizational entities seeking to test equipment with the coming Galileo signals. GATE was developed on behalf of the German Aerospace Center (DLR) with funding by the German Federal Ministry of Economics and Technology.
The test area extends across a valley of approximately 65 square kilometers, south-east of Munich, where antennae atop surrounding peaks broadcast the various Galileo signals. Technical details and specifications of the test environment are at www.gate-testbed.com.
GATE has completed its signal upgrade phase according to the latest version of the European Space Agency’s Galileo Signal-In-Space (SIS) Interface Control Document (ICD) and the European GNSS Agency’s Public Galileo Open Service (OS) ICD. The GATE infrastructure is capable of transmitting the Galileo OS, the Galileo Safety-of-Life (SoL) Service (functional), the Galileo Commercial Service (CS), and a Galileo Public Regulated Service (PRS) dummy signal.
The GATE system upgrade has been further extended to also support user integrity testing. GATE can simulating simple alarm-triggering events on the system/satellite level, supporting GPS and GATE/Galileo dual-constellation receiver-autonomous integrity monitoring (RAIM), individual user integrity test scenarios, and tests of receivers with different RAIM functionalities.
The next step will be certification of the GATE test infrastructure as an officially accredited open-air test infrastructure to perform the necessary tests needed for the process to certify Galileo SoL equipment.
Günter Heinrichs, head of customer applications and business development for IfEN GmbH, described the goals and capabilities of GATE in a 2007 GPS World article. He gave an update on developments in a 2009 video interview. A recent simulation of emergency response scenarios using the Galileo signal is described at Galileo to the Rescue.
The alarm operations center for the state of Bavaria receives this message from the accident location, and swiftly moves into coordinating activity, gathering and distributing real-time geospatial data and other key information to all emergency teams and medical facilities in the area. A demonstration of large-scale rescue operations showed how Galileo-based positioning signals in the Galileo test-bed in Berchtesgaden, Germany can more efficiently organize complex and costly rescue work through use of GNSS-supported mobile navigation devices.
Current decision-making aids in the field of search-and-rescue offer only a limited IT-supported common operational picture (COP). Many components for a full solution are still lacking. Heterogeneity in sensor networks and proprietary system designs limit interoperability and flexibility, hampering the creation of a full COP across collaborating organizations.
“E mergency Alert: Bus collision in Berchtesgaden, parking area Salzbergwerk. Many injured. Bus overturned, some thrown from vehicle, some trapped inside. Local temperature below freezing, snow falling. All crews respond immediately.”
An extensive training exercise (photo above) performed by the Fire Brigade, Bavarian Red Cross, and German Federal Agency for Technical Relief focused on challenges and advantages in this framework. The ERA-Star Project G2Real integrates real-time Earth-observation data and onsite measurements, leveraging existing and emerging open geospatial consortia. Spanish, Austrian, and Bavarian research institutes and enterprises collaborated to prepare and upgrade a COP based on integrated live information, satellite-navigation, and remote sensing. The overall aim is utilization of GNSS-enabled tools and Global Monitoring for Environment and Security (GMES) services to support search-and-rescue operations. The specific goal is a common, real-time COP that can be used by the local primary control unit/service command vehicle and by higher ranking administrations.
The common operational picture (COP).
Mission control, decision, and guidance was coordinated from a remote control room, where the mission leader, through the COP, knew everything about the position of accident vehicles, victims, rescue vehicles, and rescue team personnel, and could track their status and locations in real time. Local team chiefs on the ground also had access to this data through their mobile devices.
The mission leader could plan resources for the ensuing phases of transport and treatment, and teams on the ground could communicate with each other via a simple mobile phone application, which replaced existing calls and radio voice signals and facilitated operations and coordination.
GNSS receivers were installed in a fire engine using Galileo, GPS, and GLONASS signals to achieve best practice across all phases of emergency management. The Galileo signals were furnished by the Galileo Test and Development Environment (GATE), provided by eight transmitters atop the Alpine ridges surrounding Berchtesgaden.
Lars Holstein is project manager for Initiative Satellite Navigation Berchtesgadener Land.
Back in December 2006, I wrote about the momentum of Galileo (Europe’s planned satellite navigation system) in an article discussing GNSS trends. Galileo has been discussed off and on for well over a decade and was a hot topic for a number of years. In fact, back around 2001, the U.S. really didn’t want the European Union to embark on the project. While there was not a clear policy against Galileo, certainly the sentiment was questioning the creation of another satellite navigation system when GPS already exists that’s free for everyone to use. Ok, it probably wasn’t that simple, but you get my point. No bueno from the U.S. at that time.
The following is an EU slide that illustrates why the EU wants to develop its own satellite navigation system similar to GPS:
Source: European Commission – Montpellier, France – October 2010
Then, in 2004, the U.S. government abruptly changed its tune. It really doesn’t matter why and I’m not sure I’d believe the answer if I was given one, but President George HW Bush instituted a new policy that encouraged international cooperation. The U.S. SPACE-BASED POSITIONING, NAVIGATION, AND TIMING POLICY issued in 2004 stated, among other things, that the United States shall:
“Seek to ensure that foreign space-based positioning, navigation, and timing systems are interoperable with the civil services of the Global Positioning System and its augmentations in order to benefit civil, commercial, and scientific users worldwide. At a minimum, seek to ensure that foreign systems are compatible with the Global Positioning System and its augmentations and address mutual security concerns with foreign providers to prevent hostile use of space-based positioning, navigation, and timing services;”
Also in 2004, the U.S. and European Union signed the landmark GPS-Galileo Agreement that established a basis of cooperation. This was great news for the GNSS user community. More satellites and more signals usually equates to better performance.
The next policy update after 2004 was last year (2010) and it was simply titled “NATIONAL SPACE POLICY“. The sentiment regarding international cooperation was the same, if not leaning more towards cooperation:
“Engage with foreign GNSS providers to encourage compatibility and interoperability, promote transparency in civil service provision, and enable market access for U.S. industry;”
After the 2004 GPS-Galileo policy was published, the question from the civil user community was, “When are we going to have satellites in orbit broadcasting signals we can use?”
The answer to that question wasn’t easy, and took longer to answer than anyone predicted, including myself.
Now, we have the answer.
Unlike GPS and GLONASS, Galileo is a civilian project, not a military-funded one. I’m not saying GPS and GLONASS were easy to fund, but the core application was defined (military use), and the funding required to develop and maintain GPS and GLONASS is drawn from the military budget. Furthermore, the European Union is comprised of 27 member countries. The political dynamics are, obviously, very complex.
The Galileo funding modeling initially was to be a public-private partnership (PPP). Part of it would be funded with public money and part of it would be funded by a consortium of companies. But, that wasn’t so easy. How much funding would each contribute? What’s the return on investment? How would it generate revenue? Would there be a tax receiver sales? Would there be a user charge?
We’re not talking about small sum of money. We’re talking about several billion Euros just to get it off the ground.Think about it, how much money has the U.S. military spent to develop GPS? $30-$35 billion for development, deployment and long-term maintenance. Granted, Galileo will cost a lot less than that, but it’s still a healthy sum that no company would be willing to gamble without a solid return-on-investment (ROI) argument.
Eventually, the PPP (Private-Public Partnership) funding model was abandoned and in late 2007, and as described in a January 2008 GPS World article:
“European officials responsible for the EU budget said they had found funds for Galileo, proposing to draw unused money originally earmarked for natural resources programs this year and next. The move would provide some €2.4 billion ($3.3 billion) for Galileo — the budgetary shortfall left with the dissolution of the public/private partnerships — over the course of the next six years. The following month, European parliamentarians agreed with the plan, but felt it didn’t go far enough. They boosted proposed funding for Galileo, increasing the money set aside for the program in 2008 to €739 million ($1.06 billion), up from the much more modest €151 million under the transport officials’ original proposal for next year.
Not all were sold on public funding for Galileo. But in November, European officials said they had ironed out their differences. At the 11th hour came heated debate about how Galileo funding and contracts would be awarded among member states and their respective aerospace companies. Eventually, a final accord was reached. Europe anticipates spending €3.7 billion on Galileo through 2013.”
(Updated figures: €2.1 billion for IOV and €3.4 billion for FOC)
That was three years ago. The EU folks have been working hard since then, but talk is cheap and people stopped talking about Galileo with the exception of a few information spikes here and there. There was nothing else to say until now.
2011 is the Year for Galileo
Galileo will likely meet a major milestone this summer, launching their first two satellites for in-orbit validation. But unlike the two Galileo test satellites already in orbit (GIOVE-A and GIOVE-B), these satellites will be part of the planned 30-satellite operating constellation.
For you Galileo naysayers, the EU is past the point of no return. Eighteen satellites are contracted. There is no reversing the process. And, if I were to place a bet, it’s very unlikely to stall at 18. That would be sort of like building a structure, but not finishing the interior.
Although I haven’t seen a detailed launch schedule or control segment plan, the latest Galileo public document I’ve read (European Commission – Montpellier, October 2010) presents the following timeline:
2011/2012 – In-Orbit validation: Four IOV satellites and ground segment (based on European Commission presentation from October 2010).
2014/2015 – Initial Operating Capability for early services — 18 satellites (based on European Commission presentation from October 2010).
L1/L5 dual-frequency receivers are going to be cheap, and accurate. Today, dual-frequency (L1/L2) receivers are thousands of dollars. L1/L5 receivers will be a fraction of that cost because open signal specifications will lead to increased competition.
As I mentioned in the article last summer, the GPS Directorate is planned to have 24 satellites broadcasting L5 by 2019. The beauty of Galileo is that it can cut that time in half and make it happen by 2014, only three years from now. Here’s how.
Since Galileo supports L1 and L5 similar to GPS, you only need 12 x GPS satellites broadcasting L5 and 12 x Galileo satellites broadcasting L5 to have something close to 24 satellites broadcasting L5.
The BIG question is if the U.S. and EU will coordinate orbit slots so the 12 x GPS and 12 x Galileo satellites are in a somewhat optimal 24-slot constellation instead of an uncoordinated configuration. The civil economic benefit from taking advantage of L5 as soon as possible would be substantial. Just this week, the EU issued a report stating that 6-7% of the GDP of EU countries is dependent on satellite navigation. Better accuracy enabled by L1/L5 will spur a mind-boggling number of new applications that will further broaden the GNSS user base and economic impact. It would also stimulate GNSS receiver development from a much broader range of GNSS receiver designers than we see today.
With a combined GPS/Galileo constellation, not only will accuracy become cheaper, but availability will increase significantly. The new GPS 24+ 3 configuration is certainly a big help for high precision users with respect to availability. Can you imagine how much precise positioning availability will improve when 18 Galileo satellites (not to mention 30) are added to the mix? Last summer, the EU-U.S. Cooperation on Satellite Navigation Working Group C published a report entitled “Combined Performance for Open GPS/Galileo Receivers.” The report succinctly draws the following conclusion, with which I wholeheartedly agree:
“The studies demonstrate and quantify the improvements that can be expected when using GPS and Galileo open services in combination under different environmental conditions. In all studied cases, the combination of GPS and Galileo led to noteworthy performance improvements as compared to single system performance. The most significant improvement is for partially obscured environments, where buildings, trees or terrain block portions of the sky. The increased number of satellites available provides robust performance even as some signals are blocked, which is reflected in a significant increase of positioning accuracy and availability.”
Following are some data from the report that back up the conclusions on availability.
Availability with a 15° elevation mask
GPS only – 99.10%
Galileo only – 100%
GPS/Galileo – 100%
Availability with a 30° degree elevation mask
GPS only – 57.28%
Galileo only – 75.02%
GPS/Galileo – 98.93%
Granted, you should take these numbers with a grain of salt. These are based on positioning with four satellites in view. The reality is that for high precision users, we need data from at least six satellites for robust positioning. But, I think the scale of improvement when going to GPS/Galileo constellation is obvious and will scale similarly when considering six satellite positioning.
For all the reasons above, I’m putting my stamp on 2011 as being The Year of Galileo. Look forward to further coverage on Galileo in the coming months.
Eric Gakstatter, Editor, Geospatial Solutions and Survey Scene newsletter &
Dr. Mike Whitehead, VP of Technology at Hemisphere GPS
Event Date: 01/26/2011 10:00 AM Pacific Standard Time, 5 PM GMT
Tens of thousands of users around the world utilize GPS/GNSS receivers for mapping, surveying and navigating. Since autonomous GPS/GNSS typically does not provide the needed accuracy, users must rely on a source of GPS/GNSS corrections. There are three sources of GPS/GNSS corrections available to users who desire reliable GPS/GNSS accuracy in the sub-meter to three meter range: SBAS, DGPS and post-processing. Dr. Michael Whitehead, Chief Scientist at Hemisphere GPS, will join me in presenting a background on the three technologies as well as the strengths and weaknesses of each. I’ve known Mike for a number of years. He was an early innovator in the development of SBAS technology at Satloc as well as SBAS and DGPS receiver technology at Hemisphere GPS. He is one of the leading GNSS engineers in the world. I’m particularly excited about this event and promise a lively discussion that’s full of useful information, data and concepts that anyone using or considering using GPS/GNSS for mapping, surveying or navigating will find useful.
Surplus fuel loaded in error onboard the launch rocket caused loss of three new GLONASS satellites on December 5. The mishap burdened the DM-3 booster rocket with an excess of 1.5 to 2 tons of fuel, causing it to deviate from its course after blast-off and dive into the Pacific Ocean instead of reaching orbit altitude — dashing hopes for an imminent, nearly full global operational GLONASS capability.
“The problem was not with the fuel service unit at the launching site, but with one of the sensors showing the fuel level,” said Gennady Raikunov, the head of the Central Scientific Research Institute of Machine Building. “We do not rule out the factor of human error,” he said, adding that the Russian corporation Energia may be linked to the incident.
News correspondent Peter de Selding, writing in the December 10 issue of Space News, reported that a new version of the Block DM upper rocket stage, which was used for the GLONASS launch, features larger propellant tanks than earlier versions. The DM stage is built by RSC Energia of Korolev, Russia.
“In what appears to have been a remarkable oversight,” de Selding wrote, “the personnel fueling the Block DM stage for the GLONASS launch did not account for the larger tanks. That led to loading between 1,000 and 2,000 kilograms more propellant on the Block DM stage than what had been planned for the mission. As a result of the excess propellant, the Proton’s third stage, suffering from the additional weight it was carrying, underperformed, placing the Block DM stage and the stack of GLONASS satellites into a lower-than-planned suborbital drop-off point.”
Get Back on That Horse. On December 12, the next-generation GLONASS-K1 satellite, serial number 11, was shipped to the Plesetsk Cosmodrome about 800 kilometers north of Moscow. According to manufacturer ISS Reshetnev, the satellite will transmit five navigation signals: two signals of normal and two of high precision in the L1 and L2 frequency bands, and a new code-division multiple-access (CDMA) civil signal in the L3 band (1205 MHz). The last is destined to shift the Russian constellation at least partly towards CDMA signal broadcast, in line with GPS and Galileo. It points towards possible and eventual interoperability of some kind between the systems.
Launch is scheduled for December 27 or 28 on a modernized Soyuz-2.1.b rocket equipped with a Fregat upper stage.
March FOC Vowed. Anatoly Perminov, the head of Roscosmos, the Russian Federal Space Agency, has stated that the setback is temporary and he plans to have a full 24-satellite constellation functioning by next March. He plans to accomplish this by repositioning one of the satellites now in maintenance and then bringing it back on line and by launching two more satellites over the next few months.
Galileo Supervisory Authority enroute to Prague
The Czech Republic has after an intensive multi-year lobbying effort landed a Galileo plum: the siting of the European GNSS Supervisory Authority (GSA) headquarters in its capital. The GSA has for the past three years worked out of Brussels, and longer prior to that, under the title Galileo Joint Undertaking.
An official with the GSA told GPS World informally, “I can confirm: the decision has been adopted today by the Competiveness Council. However the move might not be immediate. The Commission claimed (rightly) to be involved in the timing of the move to minimize disruption, to ensure continuation of the ongoing work, and to avoid the disruption of the progress towards the FOC of Galileo. The financial repercussions must also be assessed.”
In an interview on Czech television, Czech Prime Minister Petr Necas called the decision a success for the entire country. “This is very good news because this will bring the most advanced technologies to the Czech Republic and, accordingly, one of most technologically advanced systems in the European Union will be controlled from here, from the Czech Republic,” he said.
Necas’ statement was not entirely accurate, as the GSA does not actually control any technology. The Galileo constellation of current (two) and future (from four to 18) satellites remains firmly in the control of the European Space Agency (ESA), administratively based in Paris with many technical activities undertaken in Noordwijk, the Netherlands, and further under the thumb of the European Commission (EC), irrevocably grounded in Brussels.
Upcoming tasks faced by the GSA include most importantly the commercialization of Galileo — which may be seen as largely a marketing activity — and security accreditation and the operation of the Galileo security center.
Several countries vied to host the agency, and in the final days Prague was competing against Noordwijk itself for the post. The siting of the GSA outside the EU’s Western European core represents a nod to its pledge to include newer Eastern members in governing activities, specifically to give preference to new member states when looking for headquarters for its new agencies. Before the vote, the Czech Republic was one of four member states that joined the EU in 2004 that had not yet been chosen to host an EU agency or body. The X-37B, debriefing after its 220-day experimental mission.
Unmanned Spacecraft Returns Home
The U.S. Air Force’s first unmanned re-entry spacecraft landed at Vandenberg Air Force Base on December 3, after a 220-day maiden voyage, conducting on-orbit experiments. The X-37B, named Orbital Test Vehicle 1 (OTV-1), is a totally autonomous vehicle that depends a great deal upon GPS for
mission success.
GPS provided a significant contribution to the X-37B’s re-entry and landing — the first unmanned spacecraft that landed like an aircraft. It fired its orbital maneuver engine in low-Earth orbit to perform an autonomous reentry before landing.
The Air Force’s newest and most advanced re-entry spacecraft, X-37B performs risk reduction, experimentation, and concept of operations development for reusable space vehicle technologies.
The Air Force is preparing to launch the next X-37B, OTV-2, in spring 2011 aboard an Atlas V booster.
Overall, the program “has huge implications for the future of unmanned space flight and for the capabilities of the USAF and DoD missions in space. The GPS is a key component of this capability.”
“To go much farther,” an informed source told GPS World, “gets me into territory that I cannot discuss in this venue.”
JAVAD Receivers Track the First Truly Interoperable Signal
JAVAD GNSS engineers in Moscow have released plots of the C/A, L2C, L5, SAIF, and the new L1C signals broadcast by Japan’s QZSS Michibiki, the first satellite to transmit L1C.
The company stated that all of its current GNSS receivers can track QZSS signals with a software update that is available as an option to purchase.
A new civil signal, L1C is designed to be interoperable among GNSSs. Currently, agreements are in place between the U.S. GPS, Europe’s Galileo, and Japan’s QZSS systems regarding broadcast and use of L1C. The U.S. system is not destined to add the L1C signal until the GPS III block of satellites, still more than three years out.
The SAIF (Submeter-class Augmentation with Integrity Function) signal is a GPS augmentation with information on positioning correction and system health. The QZSS L1-C/A, L2C, L5, and L1C signals are GPS augmentation signals that can be operated reciprocally with positioning signals provided by GPS. The figures supplied by JAVAD GNSS show SNR (top) and code-minus-phase (bottom) plots for L1C.
Plot of QZSS L1C signal, SNR.
Plot of QZSS L1C signal, code minus phase (above).
Paul Verhoef, the European Commission’s program manager for European Union (EU) satellite navigation programs, discussed current issues at length with GPS World, in a conversation on November 10. He addressed aspects of interoperability with GPS and prospects for further development in that area, the need for an ongoing political commitment by the EU to Galileo, the challenges of financing, the prospects for an 18-satellite constellation (which he dismisses as unrealistic), military considerations for both Galileo and GPS, and the recent uncertainty around Galileo’s Public Regulated Service.
Interoperability. “We have seen in the process with the U.S. that first of all there has been a quite clear political commitment on both sides, at the highest levels, that interoperability was wanted. Secondly, in the implementation we’ve had a very good working relation with our U.S. colleagues in order to establish that. The advantage that I see is that we have been able at a very early stage to deliver on such an interoperability agreement, that this is clear to industry, it provides for predictability. It allows industry to monitor clearly how the two systems are evolving, and when this interoperability is actually going to be available in the marketplace, and it allows them to time their investments, their R&D, their production, and all the rest.” [ . . . . ]
Challenges. “It is time that Galileo delivers something concrete. We’ve had many years of discussion behind us on whether the system will come, and if it will come, and how it will come, and what it will look like, and all the rest. For my part, I’m very happy to see that in 2011, we plan to launch.
The first four satellites are on the way; they are almost ready. About half the ground infrastructure is currently under implementation, we have every couple of months the opening of another ground station around the world. With this, the system becomes a reality, and I think once the satellite launches will go across television screens in the whole world, people will see that the system is becoming a reality. And I think that is desperately needed in order to give it a sense that things are moving forward. I’m really looking forward to that. That is a piece of good progress we have achieved over the last couple of years.
Constellation. “There is a bit of a discussion for some reason in Europe, for some reason some people seem to think that we could do away with 18 satellites. Well, from me you will hear a solid ‘No.’
“The availability figures for an 18-satellite constellation are around 90 percent on average, which means that for an aggregate total of some six weeks a year you would not receive sufficient views, not have sufficient satellites in sight to actually determine a position. There are going to be sectors like aviation where this is completely unacceptable, and they would never invest in anything if that is what we’re going to do. So my sense is that we will always have a lot of upward pressure in terms of constellation size. Of course it needs to be offset against costs and other considerations, but I think the pressure is always going to be there. It is very premature for people to be trying to take a shortcut, to think, well, maybe we could do with less. Because in the end you would have a constellation with a technical performance which the marketplace is not interested in, and then you would have a real problem.”
The U.S. Air Force 2nd Space Operations Squadron is scheduled to release the next software upgrade for the GPS ground system in early December, as part of an ongoing effort to improve and maintain the GPS Operational Control Segment before the next-generation GPS Control Segment is deployed in 2015. The upgrade is expected to be completed in early January 2011. The upgrade does not change the navigation message and should be transparent to GPS users. Tests have shown that the navigation message produced by the new software is identical to that produced by the current ground software. While no anomalies are expected, civilians experiencing any anomalies should contact the Coast Guard Navigation Center at (703) 313-5900.
GLONASS Launch Fails
The Russian Federal Space Agency announced that the December 5 launch of three GLONASS-M satellites ended in failure when the Proton-M rocket’s Block DM upper stage and its three payloads crashed into the Pacific Ocean about 1,500 kilometers (932 miles) northwest of Honolulu. Although an investigation will look into the exact cause of the failure, early unconfirmed reports indicate a software error. According to the Russian News Agency RIA Novosti, incorrect calculations were loaded into the rocket’s onboard computers.
Compass Settles, Moves
The Beidou/Compass G4 satellite launched on October 31 achieved geostationary orbit by November 6. The satellite is positioned at about 160 degrees east longitude. G4 is the furthest east of the operational Beidou geostationary satellites. Meanwhile, the orbital location of the Beidou 1A satellite has been changed.
On or about October 27, as indicated by NORAD tracking data, the satellite underwent a significant delta-V, raising its orbit by about 200 kilometers. Its orbit had been slightly drifting for a few weeks before the maneuver, and there was speculation that the satellite had been placed in a disposal or graveyard orbit. However, on November 24 a second delta-V was observed that returned the satellite to the geostationary belt.
The two maneuvers placed the satellite at a new location at about 60 degrees east longitude — the furthest west of any of the Beidou satellites. The satellite may eventually end up at 58.75 degrees east, one of the Beidou orbital slots registered with the International Telecommunication Union.
The geostationary satellite, the first for the demonstration regional Beidou system or Beidou-1, was launched on October 30, 2000, and positioned at 140 degrees east longitude. Following several years of use, there were unofficial reports that the satellite was no longer functional. However, station-keeping was maintained, implying some usefulness of the satellite. It remains unclear how functional the satellite is and whether it is still useful for the Beidou-1 demonstration system.
Two figures for your holiday mulling here. I keep putting one and one together, and coming up with three.
The first one points to a value of $1,000 billion. Or, as we like to say, one trillion dollars. That has a nice ring to it.
The second one hovers at a lower level, around $230 billion, not nearly as melodic as the first. But if the second one creates the first one, how much magic is there in that — do you see what I’m saying?
Let me elucidate the second one first. It emerged at the European Navigation Conference, when a spokesperson for Galileo Services put forth the assertion that, currently, European industry holds a market share of around 20 percent of global GNSS hardware, software, and services, a market size he estimated at 180 billion euros, or $230 billion. Thus the first figure.
The speaker’s point was that in other high-tech sectors, European industry held a market share of 33 percent, so really, they could be doing better. But that’s beside my point, which takes, as a rough estimate — and much subject to debate, granted — that the current global market of GNSS hardware, software, and services lies in the neighborhood of $230 billion.
Returning to the first figure, it comes from a conversation with Paul Verhoef of the European Commission; a lengthy interview treats other issues, but I don’t want to let this snippet get away. He stated, based on some market research the EC has done but not yet released (you bet I’m trying), that “at the moment, 6 to 7 percent of the European Union gross domestic product (GDP) is directly dependent on the availability of GPS. This is a GDP value of around 800 billion euros; this is more than $1,000 billion.”
A cool trillion dollars of European economy directly dependent on GPS availability.
Wouldn’t it be nice if we knew the similar figure for the U.S. economy?
Let’s just assume, for the sake of argument, that it roughly equals the European number. So United States and Europe combined, two trillion dollars of GDP directly dependent on GPS availability. Throw in the rest of the world and I’ll bet you’re at three trillion dollars.
Boy, I wish I had an investment portfolio that I could throw $230 billion at, and wind up with $3 trillion at the end of the day.
What, what, what are world governments doing, pinching pennies and cutting back programs and replenishing on need and sliding to the right — when they could be feeding a roaring economic engine, a behemoth that would support and stimulate so many other industries, and their GDPs as a whole?
Come to think of it, Russia and China are pushing forward with this capitalist plan. It’s Western countries that appear ignorant of, and thus unable to learn from, their own economic history.
A comprehensive methodology combines spectral-separation and code-tracking spectral-sensitivity coefficients to analyze interference among GPS, Galileo, and Compass. The authors propose determining the minimum acceptable degradation of effective carrier-to-noise-density ratio, considering all receiver processing phases, and conclude that each GNSS can provide a sound basis for compatibility with other GNSSs with respect to the special receiver configuration.
Power spectral densities of GPS, Galileo, and Compass signals in the L1 band.
As GNSSs and user communities rapidly expand, there is increasing interest in new signals for military and civilian uses. Meanwhile, multiple constellations broadcasting more signals in the same frequency bands will cause interference effects among the GNSSs. Since the moment Galileo was planned, interoperability and compatibility have been hot topics. More recently, China has launched six satellites for Compass, which the nation plans to turn into a full-fledged GNSS within a few years. Since Compass uses similar signal structures and shares frequencies close to other GNSSs, the radio frequency (RF) compatibility among GPS, Galileo, and Compass has become a matter of great concern for both system providers and user communities.
Some methodologies for GNSS RF compatibility analyses have been developed to assess intrasystem (from the same system) and intersystem (from other systems) interference. These methodologies present an extension of the effective carrier power to noise density theory introduced by John Betz to assess the effects of interfering signals in a GNSS receiver. These methodologies are appropriate for assessing the impact of interfering signals on the processing phases of the receiver prompt correlator channel (signal acquisition, carrier-tracking loop, and data demodulation), but they are not appropriate for the effects on code-tracking loop (DLL) phase. They do not take into account signal processing losses in the digital receiver due to bandlimiting, sampling, and quantizing. Therefore, the interference calculations would be underestimated compared to the real scenarios if these factors are not taken into account properly. Based on the traditional methodologies of RF compatibility assessment, we present here a comprehensive methodology combining the spectral separation coefficient (SSC) and code tracking spectral sensitivity coefficient (CT_SSC), including detailed derivations and equations.
RF compatibility is defined to mean the “assurance that one system will not cause interference that unacceptably degrades the stand-alone service that the other system provides.” The thresholds of acceptability must be set up during the RF compatibility assessment. There is no common standard for the required acceptability threshold in RF compatibility assessment. For determination of the required acceptability thresholds for RF compatibility assessment, the important characteristics of various GNSS signals are first analyzed, including the navigation-frame error rate, probability of bit error, and the mean time to cycle slip. Performance requirements of these characteristics are related to the minimum acceptable carrier power to effective noise power spectral density at the GNSS receiver input. Based on the performance requirements of these characteristics, the methods for assessing the required acceptability thresholds that a GNSS receiver needs to correctly process a given GNSS signal are presented.
Finally, as signal spectrum overlaps at L1 band among the GPS, Galileo, and Compass systems have received a lot of attention, interference will be computed mainly on the L1 band where GPS, Galileo, and Compass signals share the same band. All satellite signals, including GPS C/A, L1C, P(Y), and M-code; Galileo E1, PRS, and E1OS; and Compass B1C and B1A, will be taken into account in the simulation and analysis.
Methodology
To provide a general quantity to reflect the effect of interference on characteristics at the input of a generic receiver, a traditional quantity called effective carrier-power-to-noise-density (C/N0), is noted as (C/N0)eff_SSC. This can be interpreted as the carrier-power-to-noise-density ratio caused by an equivalent white noise that would yield the same correlation output variance obtained in presence of an interference signal. When intrasystem and intersystem interference coexist, (C/N0)eff_SSC can be expressed as
Ĝs(f) is the normalized power spectral density of the desired signal defined over a two-sided transmit bandwith ßT, C is the received power of the useful signal. N0 is the power spectral density of the thermal noise. In this article, we assume N0 to be –204 dBW/Hz for a high-end user receiver. Ĝi,j(f) is the normalized spectral density of the j-th interfering signal on the i-th satellite defined over a two-sided transmit bandwith ßT, Ci,jthe received power of the j-th interfering signal on the i-th satellite, ßr the receiver front-end bandwidth, M the visible number of satellites, and Kithe number of signals transmitted by satellite i.Iext is the sum of the maximum effective white noise power spectral density of the pulsed and continuous external interference.
It is clear that the impact of the interference on (C/N0)eff_SSC is directly related to the SSC of an interfering signal from the j-th interfering signal on the i-th satellite to a desired signal s, the SSC is defined as
From the above equations it is clear that the SSC parameter is appropriate for assessing the impact of interfering signals on the receiver prompt correlator channel processing phases (acquisition, carrier phase tracking, and data demodulation), but not appropriate to evaluate the effects on the DLL phase. Therefore, a similar parameter to assess the impact of interfering signals on the code tracking loop phase, called code tracking spectral sensitivity coefficient (CT_SSC) can be obtained. The CT_SSC is defined as
where Δ is the two-sided early-to-late spacing of the receiver correlator.
To provide a metric of similarity to reflect the effect of interfering signals on the code tracking loop phase, a quantity called CT_SSC effective carrier power to noise density (C/N0), denoted (C/N0)eff_CT_SSC, can be derived. When intrasystem and intersystem interference coexist, this quantity can be expressed as
where IGNSS_CT_SSC is the aggregate equivalent noise power density of the combination of intrasystem and intersystem interference.
Equivalent Noise Power Density. When more than two systems operate together, the aggregate equivalent noise power density IGNSS ( IGNSS_SSC or IGNSS_CT_SSC ) is the sum of two components
IIntra is the equivalent noise power density of interfering signals from satellites belonging to the same system as the desired signal, and IInter is the aggregate equivalent noise power density of interfering signals from satellites belonging to the other systems.
In fact, recalling the SSC and CT_SSC definitions, hereafter, denoted or as , the equivalent noise power density (IIntra or IInter) can be simplified as
where Ci,j is the user received power of the j-th signal belonging to the i-th satellite, as determined by the link budget.
For the aggregate equivalent noise power density calculation, the constellation configuration, satellite and user receiver antenna gain patterns, and the space loss are included in the link budget. User receiver location must be taken into account when measuring the interference effects.
Degradation of Effective C/N0. A general way to calculate (C/N0)eff, (C/N0)eff_SSC , or (C/N0)eff_CT_SSC introduced by interfering signals from satellites belonging to the same system or other systems is based on equation (1) or (4). In addition to the calculation of (C/N0)eff , calculating degradation of effective C/N0 is more interesting when more than two systems are operating together. The degradation of effective C/N0 in the case of the intrasystem interference in dB can be derived as
Similarly, the degradation of effective C/N0 in the case of the intersystem interference is
Bandlimiting, Sampling, and Quantization. Traditionally, the effect of sampling and quantization on the assessment of GNSS RF compatibility has been ignored. Previous research shows that GNSS digital receivers suffer signal-to-noise-plus interference ration (SNIR) losses due to bandlimiting, sampling, and quantization (BSQ). Earlier studies also indicate a 1.96 dB receiver SNR loss for a 1-bit uniform quantizer. Therefore, the specific model for assessing the combination of intrasystem and intersystem interference and BSQ on correlator output SNIR needs to be employed in GNSS RF compatibility assessment.
Influences of Spreading Code and Navigation Data. In many cases, the line spectrum of a short-code signal is often approximated by a continuous power spectral density (PSD) without fine structure. This approximation is valid for signals corresponding to long spreading codes, but is not appropriate for short-code signals, for example, C/A-code interfering with other C/A-code signals. As one can imagine, when we compute the SSC, the real PSDs for all satellite signals must be generated. It will take a significant amount of computer time and disk storage. This fact may constitute a real obstacle in the frame of RF compatibility studies. Here, the criterion for the influences of spreading code and navigation data is presented and an application example is demonstrated. For the GPS C/A code signal, a binary phase shift keying (BPSK) pulse shape is used with a chip rate fc = 1.023 megachips per seconds (Mcps). The spreading codes are Gold codes with code length N = 1023. A data rate fd = 50 Hz is applied. As shown in Figure 1, the PSD of the navigation data (Gd(f) = 1/fd sin c2 (f/fd) ) replace each of the periodic code spectral lines. The period of code spectral lines is T = 1/LTC. The mainlobe width of the navigation data is Bd =2fd.
Figure 1. Fine structure of the PSD of GPS C/A code signal (fd = 50 Hz ,without logarithm operation).
For enough larger data rates or long spreading codes, the different navigation data PSDs will overlap with each other. The criterion can be written as:
Finally,
When criterion L ≥ fc/fd is satisfied, navigation signals within the bandwidth are close to each other and overlap in frequency domain. The spreading code can be treated as a long spreading code, or the line spectrum can be approximated by a continuous PSD.
C/N0 Acceptability Thresholds
Receiver Processing Phase. The determination of the required acceptability thresholds consider all the receiver processing phases, including the acquisition, carrier tracking and data demodulation phases.The signal detection problem is set up as a hypothesis test, testing the hypothesis H1 that the signal is present verus the hypothesis H0 that the signal is not present. In our calculation, the detection probability pd and the false alarm probability pf are chosen to be 0.95 and 10–4, respectively. The total dwell time of 100 ms is selected in the calculation.
A cycle slip is a sudden jump in the carrier phase observable by an integer number of cycles. It results in data-bit inversions and degrades performance of carrier-aided navigation solutions and carrier-aided code tracking loops. To calculate the minimum acceptable signal C/N0 for a cycle-slip-free tracking, the PLL and Costas loop for different signals will be considered. A PLL of third order with a loop filter bandwidth of 10 Hz and the probability of a cycle slip of 10–5 are considered. We can find the minimum acceptable signal C/N0 related to the carrier tracking process. For the scope of this article, the vibration induced oscillator phase noise, the Allan deviation oscillator phase noise, and the dynamic stress error are neglected.
In terms of the decoding of the navigation message, the most important user parameters are the probability of bit error and the probability of the frame error. The probability of frame error depends upon the organization of the message frame and various additional codes. The probability of the frame error is chosen to be 10–3. For the GPS L1C signal using low-density parity check codes, there is no analytical method for the bit error rate or its upper bound. Due to Subframe 3 data is worst case, the results are obtained via simulation. In this article, the energy per bit to noise power density ratio of 2.2 dB and 6 dB reduction due to the pilot signal are taken into account, and the loss factor of the reference carrier phase error is also neglected.
Minimum Acceptable Degradation C/N0. The methods for accessing the minimum acceptable required signal C/N0 that a GNSS receiver needs to correct
ly process a desired signal are provided above. Therefore, the global minimum acceptable required signal carrier to noise density ratio (C/N0)global_min for each signal and receiver configuration can be obtained by taking the maximum of minima. In addition to the minimum acceptable required signal C/N0, obtaining the minimum acceptable degradation of effective C/N0 is more interesting in the GNSS RF compatibility coordination. For intrasystem interference, when only noise exists, the minimum acceptable degradation of effective C/N0 in the case of the intrasystem interference can be defined as
Similarly, the minimum acceptable degradation of effective C/N0 in the case of the intersystem interference can be expressed as
Table 1 summarizes the calculation methods for the minimum acceptable required of degradation of effective C/N0.
Simulation and Analysis
Table 2 summarizes the space constellation parameters of GPS, Galileo, and Compass.
For GPS, a 27-satellite constellation is taken in the interference simulation. Galileo will consist of 30 satellites in three orbit planes, with 27 operational spacecraft and three in-orbit spares (1 per plane). Here we take the 27 satellites for the Galileo constellation. Compass will consist of 27 MEO satellites, 5 GEO, and 3 IGSO satellites. As Galileo and Compass are under construction, ideal constellation parameters are taken from Table 2.
Signals Parameters. The PSDs of the GPS, Galileo and Compass signals in the L1 band are shown in the opening graphic. As can be seen, a lot of attention must be paid to signal spectrum overlaps among these systems. Thus, we will concentrate only on the interference in the L1 band in this article. All the L1 signals including GPS C/A, L1C, P(Y), and M-code; Galileo E1 PRS and E1OS; and Compass B1C and B1A will be taken into account in the simulation and analysis.
Table 3 summarizes GPS, Galileo and Compass signal characteristics to be transmitted in the L1 band.
Simulation Parameters. In this article, all interference simulation results refer to the worst scenarios. The worst scenarios are assumed to be those with minimum emission power for desired signal, maximum emission power for all interfering signals, and maximum (C/N0)eff degradation of interference over all time steps. Table 4 summarizes the simulation parameters considered here.
SSC and CT_SSC. As shown in expression (1) or (4), (C/N0)effis directly related to SSC or CT_SSC of the desired and interfering signals. Figure 2 and Figure 3 show both SSC and CT_SSC for the different interfering signals and for a GPS L1 C/A-code and GPS L1C signal as the desired signal, respectively. The figures obviously show that CT_SSC is significantly different from the SSC. The results also show that CT_SSC depends on the early-late spacing and its maximal values appear at different early-late spacing.
FIGURE 2. SSC and CT_SSC for GPS C/A-code as desired signal.FIGURE 3. SSC and CT_SSC for GPS L1C as desired signal.
The CT_SSC for different civil signals in the L1 band is calculated using expression (3). The power spectral densities are normalized to the transmitter filter bandwidth and integrated in the bandwidth of the user receiver. As we saw in expression (3), when calculating the CT_SSC, it is necessary to consider all possible values of early-late spacing. In order to determine the maximum equivalent noise power density (IIntra or IInter), the maximum CT_SSC will be calculated within the typical early-late spacing ranges (0.1–1 chip space).
Results and Analysis
In this article we only show the results of the worse scenarios where GPS, Galileo, and Compass share the same band. The four worst scenarios include:
◾ Scenario 1: GPS L1 C/A-code ← Galileo and Compass (GPS C/A-code signal is interfered with by Galileo and Compass)
◾ Scenario 2: GPS L1C ← Galileo and Compass (GPS L1C signal is interfered with by Galileo and Compass)
◾ Scenario 3: Galileo E1 OS ← GPS and Compass (Galileo E1 OS signal is interfered with by GPS and Compass)
◾ Scenario 4: Compass B1C ← GPS and Galileo (Compass B1C signal is interfered with by GPS and Galileo)
Scenario 1. The maximum C/N0 degradation of GPS C/A-code signal due to Galileo and Compass intersystem interference is depicted in Figure 4 and Figure 5.
Scenario 2. Figure 6 and Figure 7 also show the maximum C/N0 degradation of GPS L1C signal due to Galileo and Compass intersystem interference.
Scenario 3. The maximum C/N0 degradation of Galileo E1OS signal due to GPS and Compass intersystem interference is depicted in Figure 8 and Figure 9.
Scenario 4. For scenario 4, Figure 10 and Figure 11 show the maximum C/N0 degradation of Compass B1C signal due to GPS and Galileo intersystem interference.
From the results from these simulations, it is clear that the effects of interfering signals on code tracking performance may be underestimated in previous RF compatibility methodologies. The effective carrier power to noise density degradations based on SSC and CT_SSC are summarized in Table 5. All the results are expressed in dB-Hz.
C/N0 Acceptability Thresholds. All the minimum acceptable signal C/N0 for each GPS, Galileo, and Compass civil signal are simulated and the results are listed in Table 6. The global minimum acceptable signal C/N0 is summarized in Table 7. All the results are expressed in dB-Hz.
Effective C/N0 Degradation Thresholds. All the minimum effective C/N0 for each GPS, Galileo and Compass civil signal due to intrasystem interference are simulated, and the results are listed in Table 8. Note that the high-end receiver configuration and external interference are considered in the simulations. According to the method summarized in Table 1, the effective C/N0 degradation acceptability thresholds can be obtained. The results are listed in Table 9.
As can be seen from these results, each individual system can provide a sound basis for compatibility with other GNSSs with respect to the special receiver configuration used in the simulations. However, a common standard for a given pair of signal and receiver must be selected for all GNSS providers and com
munities.
Conclusions
At a minimum, all GNSS signals and services must be compatible. The increasing number of new GNSS signals produces the need to assess RF compatibility carefully. In this article, a comprehensive methodology combing the spectral separation coefficient (SSC) and code tracking spectral sensitivity coefficient (CT_SSC) for GNSS RF compatibility assessment were presented. This methodology can provide more realistic and exact interference calculation than the calculation using the traditional methodologies. The method for the determination of the required acceptability thresholds considering all receiver processing phases was proposed. Moreover, the criterion for the influences of spreading code and navigation data was also introduced.
Real simulations accounting for the interference effects were carried out at every time and place on the earth for L1 band where GPS, Galileo, and Compass share the same band. It was shown that the introduction of the new systems leads to intersystem interference on the already existing systems. Simulation results also show that the effects of intersystem interference are significantly different by using the different methodologies. Each system can provide a sound basis for compatibility with other GNSSs with respect to the special receiver configuration in the simulations.
At the end, we must point out that the intersystem interference results shown in this article mainly refer to worst scenario simulations. Though the values are higher than so-called normal values, it is feasible for GNSS interference assessment. Moreover, the common standard for a given signal and receiver pair must be selected for and coordinated among all GNSS providers and communities.
This article is based on the ION-GNSS 2010 paper, “Comprehensive Methodology for GNSS Radio Frequency Compatibility Assessment.”
WEI LIU is a Ph.D. candidate in navigation guidance and control at Shanghai Jiao Tong University, Shanghai, China. XINGQUN ZHAN is a professor of navigation guidance and control at the same university. LI LIU and MANCANG NIU are Ph.D. candidates in navigation guidance and control at the university.
Paul Verhoef, the European Commission’s program manager for European Union (EU) satellite navigation programs — namely Galileo — discussed current issues at some length with GPS World, in a conversation on November 10. He addressed aspects of interoperability with GPS and prospects for further development in that area, the need for an ongoing political commitment by the EU to Galileo, the challenges of financing, the prospects for an 18-satellite constellation (which he dismisses as unrealistic), military considerations for both Galileo and GPS, and the recent uncertainty around Galileo’s Public Regulated Service.
Alan Cameron (AC): All four GNSS operators are or have been in discussions about interoperability, to varying levels. In my perception, the U.S.-E.U. agreement on GPS/Galileo interoperability appears to be the strongest, most defined, and most committed result of all these talks. Do you agree?
Paul Verhoef: I think that’s correct. We have I think seen in the process with the U.S. that first of all there has been a quite clear political commitment on both sides, at the highest levels, that interoperability was wanted. Secondly, in the implementation we’ve had a very good working relation with our U.S. colleagues in order to establish that. The advantage that I see is that we have been able at a very early stage to deliver on such an interoperability agreement, that this is clear to industry, it provides for predictability. It allows industry to monitor clearly how the two systems are evolving, and when this interoperability is actually going to be available in the marketplace, and it allows them to time their investments, their R&D, their production, and all the rest.
I’m extremely happy with that. We have moved on with U.S. colleagues to look at a whole range of other issues between the two systems, be it safety-of-life service, be it all sorts of other issues, and I think also because we jointly tie in our industries, we are transparent about the results, we provide papers, as we have recently done on SOL, we provide clarity to users worldwide. I think it is an excellent example of how this work can be done, and I’m extremely happy with it.
There is possibly still quite a lot of work ahead of us. I would say there is work forever. There are evolutions in the thinking on GPS, there are evolutions in the thinking on Galileo, we need to adapt to new situations jointly, but there is a clear endeavor between the two sides to progress with that. There are suggestions every now and then, also some of the areas we haven’t been looking into, we should look into more closely, particularly referring to our PRS service, and whether we should have some closer contacts with the U.S. on how we would, on what we do jointly on PRS and GPS use, etc. But comments made, there is quite a lot of work underway.
This doesn’t mean we aren’t doing anything with the other systems. We have with most of them very good relationships. Sometimes, like with the Russians, interoperability is a bit more complex because of the different technologies used, but the interest is there. We are with Japan pretty well advanced with the number of discussions; it is of course in a bit more limited context in relation to what the result would be for the services over Japan and the Asian region. With India, we are moving forward. As you know, with our Chinese colleagues the situation is a bit more complex. Although we have good discussions, I think there is still a bit of length to go before . . . . We come first of all with clear notions of compatibility, and interoperability is yet beyond that. So we need to take that in the order of priority, and the first priority is obviously compatibility.
AC: How does this commitment to interoperability balance with the lagging arrival of Galileo satellites, relative to the speed with which Compass is establishing a constellation? For market acceptance and worldwide use, is a well-defined and interoperative signal structure more important than a fully operating constellation?
Verhoef: That’s a good question. It’s not easy for me to predict how the markets will see that. If I judge by the way that our interoperability agreement with the U.S. has been received, one would tend to think that the market would be in favor of some predictability and some transparency in terms of the plans of the deployment schedule, and the standing, the solidity of the program in having a visibility, the capabilities of the technology, in having a timely interface specifications available, and all that sort of thing. We have done that, obviously there are currently a number of delays. My sense from what I hear from the marketplace is they are not too worried about that. They are really interested in being able to follow that.
Whether the strategy of playing for speed is going to work, I guess is still an open issue. In my view it is rather a dangerous and rather tricky situation, because there is not too much visibility on the Chinese program. It is only recently that they have started lifting a bit of the veil on it. I’m not sure from what I hear from the marketplace, whether they think they know what the system is going to do, they don’t know the specifications, they don’t know what the exact planning is. And obviously there is a bit of an issue hanging in the air there: that if compatibility and interoperability with that particular system is not in place, what is going to be the consequence?
Those agreements from China are not in place with us. It is not in place with the U.S., it is not in place with Russia, it is not in place as far as I can see it with Japan or with India. So the Chinese give a bit of an impression that they’re quite willing to go at this alone. Now I must say that over the last two years they have come into the fold of the international community a bit more, we have managed to convince them to discuss these issues with us not only bilaterally but also multi-laterally, at the providers’ forum which is taking place in the context of the International Committee on GNSS of the U.N. I think that they see that this is a good place to be. They have now offered to host a meeting of that committee in 2012, so the first indications are there that they are ready to be more of a world citizen, so to speak. But I think in order to find acceptance not only at the level of governments, but also at the level of markets, they’re going to really come forward with clarity on their intentions on compatibility and interoperability. As long as there is uncertainty about that, my sense is that the marketplace will be holding back and will want to see how this develops before they move on anything at all.
So it could be a rather risky strategy for the Chinese if they don’t seek to come to rather clear agreements with the other providers. And not only the first time, like now, but on a continuous basis. We all have evolving systems, we all want to come with the possibility of new ideas. I don’t think there is anybody really trying to stop the others, but we are going to have to work very hard to make sure our respective plans all can be granted without undue impacts on the others. This is a continuous process which is going to last, I guess, forever. We’re going to have to really work at that. We are continuing everything we can in order to progress with the colleagues in China. I’ve recently had meetings with them, a couple of weeks ago, in August, to try and really understand what their concerns are and be able to address those. We still have hope to be able to
come to a satisfactory conclusion.
AC: Other than financing, what are the most significant challenges for the Galileo programme today?
Verhoef: My sense, Alan, is that the most significant challenge for the programme is that we need to be able to give from the EU levels, at a political level, a political commitment to the system, which is solid. Meaning investments in receivers, in applications are done on the basis of a belief that the political commitment to the system, to supply the necessary minimum technical performance, that commitment is sufficiently solid, and sufficiently underpinned in order to have users worldwide say, Yes, we believe in this, and we think our own investment in this, even if it is sometimes a few thousand euros or sometimes hundreds of thousands or millions of euros is really warranted.
Of course this commitment is currently in place in the U.S., the U.S. government has been able over the years to provide a very credible goal commitment as to its performance with GPS. There are sometimes discussions on it, but by and large people do accept that the commitment of U.S. government is very credible. Obviously, we seek to establish a very similar level of credibility of commitment, because otherwise there would always be doubt as to, well, there is a problem now and what would you do in the future, and would they continue doing this, and would I finance that, and all the rest, and you would have continuous discussions, and it brings a large measure of uncertainty in the marketplace. Given the rather difficult financial times everybody goes through around the world, this is not a good way to proceed. We are really working very hard with all the political levels in Europe to try and get such a commitment to the table, and with it of course the underpinning for it.
The other challenge is, I think it is time that Galileo delivers something concrete. We’ve had many years of discussion behind us on whether the system will come, and if it will come, and how it will come, and what it will look like, and all the rest. I think that for my part, I’m very happy to see that in 2011, we plan to launch. The first four satellites are on the way; they are almost ready. About half the ground infrastructure is currently under implementation, we have every couple of months the opening of another ground station around the world. We had recently Kourou, New Caledonia, we will have next month the opening of the new ground station in Kiruna in northern Sweden. We have Oberpfafenhoffen in Germany open, we have Fucino in Italy open. With this, the system becomes a reality, and I think once the satellite launches will go across television screens in the whole world, people will see that the system is becoming a reality. And I think that is desperately needed in order to give it a sense that things are moving forward. I’m really looking forward to that. That is a piece of good progress we have achieved over the last couple of years.
AC: And now, would you like to say anything about financing?
Verhoef: Financing of any big programs, be it in the U.S. or Europe or any other part of the world, is always a challenge. Whether it is for civil programs, for military programs, for space programs, for terrestrial programs, no matter what, these sort of programs always have an issue with financing. Obviously, what we are trying to do at the moment is come to a financial engineering of the program, if you wish, in such a way that we can, from the program management point of view, take a commitment that we are normally not going over certain levels of financing, of budget use. I think this is possible to do. Obviously, then we will need our political levels, as I just said, to come to the commitment for this financing. We have at the moment in the world, but also in Europe, a particularly harsh financial crisis which means that many programs, be it in infrastructure provision, or in space, or in other areas, are under pressure.
We think that the situation with Galileo is rather solid, not only have we already invested a lot, but I think the return on investment is important. The fact that we need an independent system is clear to everybody. Just to give you some figures on that, at the moment, 6 to 7 percent of the European Union GDP is directly dependent on the availability of GPS. This is a GDP value of around 800 billion euros, this is more than 1,000 billion dollars. This is a figure where you say, well, you know, is it acceptable that we have this all dependent on a single system, and I think that the view of most is, No, this is silly, this is a risk we shouldn’t take. Therefore our own system is well worth putting in space. I think the cause for Galileo is fully accepted, and on that basis I don’t feel too concerned.
What is important is that we get a good grip on the cost of such a program. We’ve had to struggle with that a bit because we have found out — and this is known — we have found out that a number of our estimates a couple of years have been underestimated, particularly in the area of launches, which is much more expensive that we had anticipated. It is always difficult to do a good estimation for a program like this, because basically what you are buying is a machine that has not been made, at least in Europe, ever been made before. And because it is completely custom-made, it is not entirely clear during the estimates what are the costs that would be associated with it. But we are slowly coming to grips with that.
We now have a much better view of where our cost envelopes would be going, and I think this is important for the European ministries of finance. I think they are not necessarily too worried about the actual costs, as long as those costs have some form of stability in them. As soon as there is any uncertainty, of course, ministries of finance become very nervous, because then they are heading for very uncertain futures, and they don’t know how to handle any possible program reserves, and all the rest of it. That is of course a very difficult situation for them. But I think these times are now almost over, we now know, after we have the majority of the initial procurements behind us, we know pretty well what the system is going to cost, and that is a good basis to proceed.
AC: Regarding the launches in particular, I’ve seen a proposal recently to move the launches away from Ariane and to Russia. Is this politically feasible?
Verhoef: This is obviously politically very complex, in the sense that there are a couple of elements. The number one element, we have in Europe an access to space policy with a clear strategy to make sure we have our own abilities to launch. This access to space policy is built on a philosophy that we need to have our own capacity, meaning that Ariane Espace is also used for commercial purposes, but it is particularly used for governmental launches. There is obviously a price tag attached to that, and I think that is then to be seen how we handle that.
The second thing is maybe a very formal issue, but in the end I think is very important. We have taken in the WTO a commitment that others could launch governmental satellites for us, but only the basis of reciprocity, meaning that we are willing to open our markets of governmental launches for launch providers from other regions of the world, but only if they open up their own governmental markets. This until now has not happened. So, if we would give access to either Russian or U.S. launchers, to take two of a number of theoretical possibilities, it would be difficult to see that we would see competition to our own launch system, without our own launch system having access to the governmental markets in the U.S. and in Russia. I think this is a basic political fact of life, and I don’t see quite easily that this position is going to be changed.
I know there has been an expressed interest, both from a couple of Russian quarters, also from U.S. quarters, and I have been very clear to them. At the moment that the two respective governments that I mentioned open up their governmental launch market for the European launch systems to compete in, then I can accept offers from them in any bidding phases that we have. This is an issue, one can say, well you are running over cost, maybe you should go out nevertheless. This is an easy way out, but on the one hand, it would completely undermine our WTO commitment and our policy in this, so I cannot see at the political level that there is going to be a change in this. We’re going to have to see how this proceeds. There is obviously a discussion on it, because one can now see what some of the price implications possibly would be, but this is where we are. I’m not too worried about that.
It is true that we receive the launch providers, they have their ideas, they have their suggestions they offer to us. I have been careful in making sure to them they understood the context in which they do this, and I think they know what the situation is. Obviously they still try because maybe they would be able to provoke a change at the political level, but for the moment I very much doubt that that would be the case. AC: Going back to the figures of GDP percentage dependent on GNSS, if these could be published, and if the U.S. could supply the corresponding figures for the U.S. economy, and even Russia and China, this would be of mutual benefit, to furthering all GNSSs everywhere.
Verhoef: These are indeed as you mentioned very important notions and they need to be well understood. This is where I see that the cooperation with us and the U.S. government is so good, because we have realized, on both sides, exactly that. We are very happy that there is a GPS system in certain ways complementary to ours, and in other ways a backup to us, and vice versa. You see it in the recent statement of the Obama administration, where they say they would want to extend their discussions with third countries to look at how these systems work together. My sense from what I hear is that this goes well beyond compatibility and interoperability. If we together provide a real important piece of infrastructure to the world, we need to be aware of the responsibility we carry with that. AC: When you say it goes beyond compatibility and interoperability, what would you call it?
Verhoef: There have been certain very informal suggestions already over the last couple of years from the U.S. as to whether we think it would be possible at some moment in the future to optimize operations between the two systems. For example, look at maintenance and outages jointly, so there is the least impact on the user community. To see whether certain optimizations would be possible between the two systems which would help that. Maybe to even go so far as looking into what sort of backup we could play to each other, etc., etc. I can well see for example that we have a need to have access to a large amount of territories around the world for our ground segment. So does the U.S., and I hear that this discussion is coming to the fore once more. Well, we can help each other with that. The European countries have access to quite a bit of territories around the world, the U.S. has as well, and there are other territories. Maybe we can co-locate a number of facilities with some joint security and all the rest of it.
One can imagine a whole lot of things where we say, well, you know, we are helping each other to make sure that in terms of operations and overall service provision, that we have a common strategy. This doesn’t mean we are going to be fully dependent on each other. It is more the reverse. Use the respective independencies to the maximum, but by having the common strategy, optimize the full use of those infrastructures so there are the least impact on users if there are issues.
AC: I’ve heard that kind of suggestion of optimization between the two systems from Brad Parkinson. Have you heard them from some kind of official entity, a negotiating body of the U.S. government?
Verhoef: I have personally been approached at a very high level in the U.S. government about this, but very, very, very informally. As to whether we would think that, not immediately but in the future, and these would be possibilities, and would we be interested to discuss that, and all the rest. Now, for the moment, it hasn’t come to much, because we have so much else to look at which is much more urgent. But the notion that this is maybe useful in the longer term is clear. Let’s face it, the current work that we are currently doing with the U.S. colleagues on defining safety of life service, which has a single standard across the two systems and which is then respectively implemented and supported, and being a future backbone for the aviation sector, is one of these things.
If one goes further, there have been indeed also by people more on the ground, there have been suggestions, maybe we could learn from each other. I recall a visit to the GPS Wing where the colleagues there were enthusiastic, saying we have learned all sorts of good things, and maybe you want to profit from that: you get certain experiences in the future from which we would like to learn. We should keep an open mind to see that we on both sides have some channels on that, etc., etc.
This is not to say — on the contrary — that we have received formal letters with requests for all this to be put on paper and negotiated. That is not the point. I think on both sides there is awareness that these are potentials that one moment we may want to develop.
AC: You mentioned earlier the words “commitment to a minimum necessary technical performance.” Is that 18 satellites, is that 24?
Verhoef: There are a number of factors in that. The first is, I think we need to be looking at where the users are going. The users are clearly asking for high figures in terms of availability, and in terms of accuracy. Those sort of demands, which I would only expect to increase over time, I would hardly expect to see that in this particular technological world, users are going to say, no, no, we can do with less availability and less accuracy — I just don’t believe it, I don’t think that is the normal trend where you go with technology. My sense is there is always going to be pressure from users for those, which translates certainly into more satellites. At the very simplest level, it militates in favor of more satellites. This is the first element.
The second element is I see, the discussion in the U.S. where there is a commitment of the U.S. government to provide 24 satellites, and as we saw at the ION conference once more serious discussions as to whether, with over 30 satellites in orbit, how comfortable the U.S. is positioned in providing that minimum technical performance. I think one has to come to the conclusion that this is to be looked at with some care. The question is, indeed, is 24 enough, or should we go to a higher minimum in order to look at that. Or should we adjust the spare strategy in order to have a much larger margin on that. Which effectively means that you also have more satellites in orbit, presumably.
There are obviously, there is a discussion in Europe, because the 30-satellite constellation that we had defined was in part dictated by a very high-performance safety-of-life service that we had foreseen. Now that we have come to the conclusion that that particular safety-of-life service, whic
h at that time was foreseen to be much more proprietary, to give a PPP consortium a chance of better revenues — now that we have come to the conclusion that that is no longer necessary, and no longer desired by the marketplace, because the marketplace is very clearly saying, sorry guys, we are much more interested in you having an agreed standard with GPS and implementing that. There is obviously a review needed to see whether the 30-satellite constellation we had foreseen is what we’re going to do.
There is another element. If I look for the moment at the performance charts and statistics which are put in front of me by the European Space Agency and a few other space agencies in Europe, it is clear that it is probably more satellites that are necessary rather than less. There is a bit of a discussion for some reason in Europe, for some reason some people seem to think that we could do a way with 18 satellites. Well, from me you will hear a solid No.
The availability figures for an 18-satellite constellation are around 90 percent on average, which means that for an aggregate total of some six weeks a year you would not receive sufficient views, not have sufficient satellites in sight to actually determine a position. There are going to be sectors like aviation where this is completely unacceptable, and they would never invest in anything if that is what we’re going to do. So my sense is that we will always have a lot of upward pressure in terms of constellation size. Of course it needs to be offset against costs and other considerations, but I think the pressure is always going to be there. It is very premature for people to be trying to take a shortcut, to think, well, maybe we could do with less. Because in the end you would have a constellation with a technical performance which the marketplace is not interested in, and then you would have a real problem.
AC: What about factors other than the marketplace? European governments and European militaries, what is their thinking about the PRS, and about having to work with an 18-satellite constellation, either for incomplete, as you say 90 percent availability, or perhaps a reconfigured constellation that gives continuous coverage over Europe but not over the rest of the world?
Paul Verhoef: The latter, I have not heard of. Presumably if Europe, there is an interest in using satellite navigation for strategic defense capabilities as you mention, my impression is that that is only in part an interest in Europe, but that is particularly of interest outside Europe, so I think you would still look at a sort of near-worldwide requirement.
Let me say it in different words. Everything that I have heard is that our governments are interested in a fully fledged PRS service which is accessible from around the world, which is uninterrupted, and which has the highest grades of security. All of that means 18 satellites is just not going to do it, and we need more. There is then a question, coming back to the discussion on interoperability, what is it GPS and Galileo could do together? I think that it’s early days, the discussion is not really fully on the table yet. There are a number who show an interest in possibly discussing this. We will see whether this comes to a discussion and how we would do that.
My presumption is, nevertheless, even if this would be done there is on both sides of the Atlantic an interest in having a basic level of autonomy and independence, even if there is a possible combined use, and it means that under the basic conditions of autonomy and independence, that you are fully capable of using that services for governmental purposes. From that perspective, we’re going to need a fully-fledged constellation.
So I think the discussion on the constellation size is particularly introduced by those who consider that the system is maybe expensive, and one can cut costs and thereby reducing the size of the constellation is an element of cutting costs. Which obviously, in theory is true. But I think that no matter what the size of the constellation, you’ll always have a basic level of costs, of operations which is linked to manpower and basic ground installations which is going to be necessary. The procurement of a number of satellites more or less, I don’t think is going to be making that much of a difference in the overall picture.
AC: In all European discussions, the military seems to take a very quiet and very backrow seat, if even perceived to be in the room at all. This is very different in the U.S., where the GPS is financed, largely, out of the military budget and obviously administered by the military. What influence on your activities and the Galileo program does the military in Europe play, and secondly, if there was a budget shortfall, can military funds be accessed to help get Galileo going?
Verhoef: It’s a bit of a theoretical question. You know, the EU budget is made available by our 27 member states, and we get money from them. There is no tag on that money which says, “this part is coming from agriculture and this part is coming from military and this part is coming from transport, and therefore it has to be used for that.” We get a certain sum of money and on the basis of that, on the total, there is then a discussion on for what purposes it is used. So the question in Europe is not so much where it comes from, but what it is being used for.
On the national level, of course, it is a bit different, because there you have a defense ministry or a transport ministry, buying with its budget a certain thing. Well in this case, it is the European Commission buying, on behalf of the EU, on the basis of a general budget which is made available.
But let’s come back to the military. There is at the moment, number one, there is a discussion ongoing in the Council, on the basis of a proposal which we have recently made in the Parliament on the access rules to the PRS service. That means, what are the agreed rules that the member states would like to establish, who is having access, under what conditions, to PRS? It is a fully controlled service with only government-authorized users. It is clear there is an enormous amount of use foreseen , including in the defense area. I think there is a very broad level of agreement in the EU, that the normal use in terms of logistics etc. etc. of the defense establishment should be completely possible. There seems to be an increasing majority of member states that is keen to see that the PRS is made available for certain peacekeeping missions and other things. You know this is defense/military use, but in the particular context.
What is still not being discussed is would Galileo be used for purely military purposes? Let’s put a word to it, for missile delivery, or not? This is where I think the discussion is not there. There are no doubt member states that have a view on that. I think everybody is aware of the sensitivity of that particular discussion. It is not something that the Commission gets involved in, because this is an issue would need to be decided by the member states and the European Parliament. Everybody knows that there are differences of views on this.
But with that sector excluded for the moment, this means that there is a large sector of agreement for civil protection purposes, for overall logistics purposes, for peacekeeping purposes, and all sorts of other purposes — PRS should be used. There are as a result in many of our member states, very advanced works taking place on shaping this up, on finance preparations at the national level, to put authorities in place at the national level who control this use. They will in turn interact with the system in order to organize the distribution of encryption keys and all the rest. There are going to be common minimum standards which are going to be developed. In a whole lot of ministries there are groups looking at how this technology is going to be used, under what circumstances industry can be licensed to build the receivers necessary for it, how they would use it in their respective operations, etc., etc.
So what you see in addition to the expenditure at the EU level for the system itself, and for the security of the system itself, there is quite a large investment in member states to prepare themselves for the use of PRS. It is true that in some countries, the military se this as an opportunity to have much more direct involvement in advanced satellite navigation technology, which with GPS is always under license form the U.S. DoD, which has a lot of strings attached. In this case too there will be strings attached, but they will be strings which we attach ourselves to it.
One also has to say that the use of GPS for military purposes in Europe, between member states is not equal. Not all our member states have access to military GPS, which means that for example if we would have joint peacekeeping missions from EU member states, and we would do that on the basis of GPS, that a number of member states would not be able to involve themselves in that, if that is a core technology which needs to be used, because they don’t have access to it. So this is another reason why there is an increased interest to see what we would do with the situation and how it would evolve.
My sense is that this is an area where there is a lot of discussion. There is a lot of effort being put into it. PRS service is clearly one of the key services that the system is going to deliver. Our governments are by and large very upbeat about using it, they are preparing for it, and this is a good issue.
AC: In September, you participated in GPS World’s Grand Game of GNSS, playing for the purpose of the game the role of a member of the U.S. Industry group. Any lessons learned, perspectives gained?
Verhoef: First of all, Alan, it was a fantastic game. I want to congratulate you personally for having put this into the very enjoyable evening, it was certainly part of a lot of fun. It was fun to play U.S. industry, and my colleague from the State Department playing a European operator, a funny situation.
What I learned from this, if you slip into these roles, basically everybody has similar roles across the world, industry, governments, same roles. One can easily understand — whether I did learn anything particular from it, I did learn that one can have a lot of fun together.
Once envisioned to orbit 30 satellites, Galileo’s constellation has over time been reduced to a planned, though still not space-borne, four initial satellites plus 14 operational satellites for a total of 18. The European Space Agency (ESA), under direction of the European Commission (EC), confirmed at the October 19–21 European Navigation Conference (ENC) in Germany that it plans to declare an Initial Operating Capability (IOC), or FOC-1 (Full Operating Capability, Phase One) — the terminology varies — once a constellation of 18 is achieved, in the 2014–2015 timeframe.
Such a reduced system will not enable global delivery of the Public Regulated Service (PRS), planned as a Galileo-only (that is, not in interoperation with or dependent upon any other GNSS) application. The PRS will use encrypted signals, and access will be limited to authorized governmental agencies. Much sought by the EC, its member states and militaries, and in some views the original and most compelling motivation for Galileo in the first place — to wit, independence from GPS — PRS now appears to recede from view. Quite simply, more satellites are necessary.
The same geometry-in-space and radio-frequency factors apply to some of the high-precision services once envisioned for intelligent transport systems (ITS) within Europe: tools to relieve traffic congestion and decrease environmental pollution, to enable more and denser high-speed rail links and freight, and similarly for marine (in-harbor and along-canal) operations.
Galileo finds itself face to face with the potential absence of its own raison d’être. It may need to collaborate with GPS to achieve what were Galileo-only goals. A possible alternative would be to reconfigure the reduced constellation somehow so that it can provide continuous service over the European continent only. This option would not satisfy the needs of European peace-keeping missions around the world, however.
Doubts from the Floor. An audience member at the E1NC posed the question of the hour to Edgar Thielman, Head of Unit, EU Satellite Navigation Programmes, in charge of Applications, International Relations and Security Issues:
“We are going to have Galileo-only applications like the Public Regulated Service (PRS) for governments. This cannot work with 18 satellites, unless maybe — this has to be investigated — the 18 satellites are configured in a constellation that will give optimum coverage of Europe. Has this been thought about yet?”
Thielman replied that European governing agencies are “in discussions about what to do.”
The EC’s problem is that there is no money available after 2014 — at least not until the next formal round of funding allocations is made.
A high-level representative of DLR, the German aerospace agency, spoke from the audience about simulations his agency had undertaken using a hypothetical constellation of 24 satellites. This seemed to hint that Germany might know where additional funding could be found for more satellites, but separate news developments (see following story) contra-indicated this possibility.
Proposal. Earlier in October, the EC released a proposal for better management of critical transport and emergency services, better law enforcement, improved internal security (border control), and safer peace missions — all through the PRS.
“The safety and security of each and every European citizen lies at the heart of this proposal,” said Antonio Tajani, EC vice president in charge of industry and entrepreneurship. “Given our increasing reliance on satellite navigation infrastructures, there is an urgent need to ensure that key services, such as our police forces and rescue and emergency services, continue to function in moments of crisis, terrorist threat, or disaster. Furthermore, the market for PRS applications offers an important opportunity for Europe’s entrepreneurs.”
Thielman Speaks. In a private conversation with GPS World, Edgar Thielman stressed that “PRS will be one of the first services of Galileo, as soon as it is functional. We envision that in the 2014/2015 timeframe, with 18 satellites enabling the IOC. We know that development of receivers and technical hardware is still to be done. Thus we put forward the proposal, to be on safe ground, to have a common understanding for industry and participants.
“The IOC constellation will provide in the beginning the Open Signal (OS), the Safety-of-Life (SOL), and the PRS. The interests are of these three services are different from one another. The PRS follows a completely different logic. But the Member States are interested in getting this specific service, and also the European Commission and the European Council.”
Thielman explained that these three collective entities anticipate PRS capabilities to deal with “crisis situations — where the Open Signal is jammed. Government services must be able to function in very difficult circumstances, for instance, peace-keeping missions.”
He added, “We want to open this service to other international organizations and states, subject to agreement.” Such discussion on cooperation with third countries, as well as discussions within the EC and among Member States on optimization — that is, ways to overcome the deficiencies of a constellation limited to 18 satellites — are ongoing.
“We have a lot of talks. The starting point is to have a system that satisfies the needs of the EU and EC with the means we have.”
It was not stated, but seems implicit to many observers, that such means to enable the PRS may require more cooperation with and use of GPS than Galileo proponents may have originally wished.
Space, Ground Work Package Signed
The EC signed the fourth of six procurement contracts for Galileo, this one for €194 million for operations of the space and ground infrastructure, with Space-Opal GmbH, a joint venture created by DLR GfR (Germany) and Telespazio S.p.A (Italy). EC VP Antonio Tajani maintained that “Galileo is becoming a reality. Europe will have its own independent satellite navigation system capable of high precision and reliability. We are fully committed to the roll-out of the system. Given the increased reliance of companies and citizens on satellite navigation, Galileo will play an important role in our daily lives.”
Procurement for Galileo’s full operational capability is divided into six contracts. In January 2010, three contracts were awarded to ensure system engineering support, satellites, and launchers. The two remaining procurement contracts, for the completion of the ground mission infrastructure and the ground control infrastructure, will be awarded in early 2011.
Money Trouble
The global financial crisis has European finance ministers trying to back away from current Galileo funding, let alone any projected future increases. The German government asked the EC to propose ways to cut current Galileo cost projections, said that country’s Transport Ministry. According to reports, one suggestion to realize savings calls for a switch from the planned Ariane 5 launcher (operated by a largely French company) to the Russian Soyuz launcher to place Galileo satellites in orbit.
Financial Times Deutschland cited an EC report forecasting extra costs of €1.5–1.7 billion ($2.1–2.4 billion), beyond the current €3.4 billion budget. FTD said the report labels Galileo as unprofitable in the long term, at an annual loss of €750 million.
In 2007, the European Parliament withstood such running tides and devised an unusual financing scheme to keep the program going, by raiding a massive surplus agricultural support fund. Such a maneuver may not be repeatable, as farmers have long memories; EC officials, still feeling the heat from that move, profess that, barring an unforeseen occurrence, Galileo cannot get any more money.
Notwithstanding, Edit Herczog, member of the European Parliament’s committee on industry, research, and energy, stated that “If it is too big to fail, then it can’t. This is something we can build on.”
Antonio Tajani, an EC VP, rejected the German press figures as “exorbitant” and “unimagineable.” He maintained that Galileo’s costs remain at €3.4 billion ($4.7 billion). “I don’t know where these figures come from,” he stated at a news conference.
Space Agency Acts on Security, IP Concerns
ESA abruptly withdrew six technical presentations on new Galileo developments from the European Navigation Conference (ENC) without immediate explanation. Probing by GPS World elicited a reply that “the papers were withdrawn by ESA because they contained too detailed information that could have led to knowledge transfer.” A further hypothetical, and emphatically unofficial, possible reason was posited later by one knowledgeable attendee, having to do with security issues.
Most of the presentations were due to be given during a session on “Galileo Development and Test Results” on Tuesday afternoon, October 19. The withdrawal created some consternation among the several hundred conference attendees, as the session would have been the technical highlight of the conference and was much anticipated, and further because no official explanation for the action was offered. A somewhat dated presentation was offered in place of the first paper, and the rest of the session was simply dismissed.
Later during the conference, GPS World heard speculation from a conference participant, who did not have any official knowledge or clearance, that one or more of the papers may have contained information about the Galileo ground control system that, if made public, might have created vulnerabilities to Internet hacking attacks.
The withdrawn papers covered the Galileo Orbit and Synchronisation Processing Facility, results from the first user receiver-autonomous integrity monitoring and interference mitigation tests at the Galileo Test Range (GATE) — although the GATE manager stated to GPS World that this particular paper was not withdrawn by ESA for any official reason, but by the GATE itself, because it had received the special test receiver necessary from ESA too late to perform the tests in question — the Galileo ground mission segment operability chain, cumulative distribution function overbounding, the Galileo constellation system verification processes and methods, and, from a later session on GNSS software and algorithms, a paper on coherent E5 ALTBOC processing with the Galileo TUS receiver.
In the closing session, David Broughton, secretary-general of the International Association of Institutes of Navigation, summarized,”Content of the conference generally was excellent, with the exception of coverage of Galileo, with many papers withdrawn by ESA. Understandably, this caused much annoyance from the delegates. It was disappointing to see the conference treated with such disdain — if the European Navigation Conference cannot be given a true account of Galileo’s progress, then who can?” This drew applause from the delegates.
The authors of three of the papers are staffers from ESA itself; the authors of the other three come from companies under contract to the agency.
SatNav Briefs
China’s next BeiDou-2 Compass-G4 satelliterose into orbit on October 31 from the Xi Chang Satellite Launch Center in Sichuan Province, 10 years to the day from the launch of the first BeiDou-1A.
Japan’s new QZSS vehicle Michibiki has reached its final quasi-zenith orbit.JAXA, the Japanese aerospace agency, stated “we started transmission of one of the positioning signals, namely the L1-SAIF signal from the L1-SAIF antenna of the Michibiki on October 19, after we turned on its onboard positioning mission devices.
“We will make sure that the L1-SAIF signal has compatibility with the existing positioning services, and then begin transmitting signals from the L-band helical antenna, namely the L1-C/A, L2C, L5, L1C, and LEX signals.”
SBAS for Latin America. A new satellite-based augmentation system signal covering the Caribbean, Central and South America was broadcast by GMV and Inmarsat. The demonstration of an SBAS in test mode took place in front of representatives from the International Civil Aviation Organisation (ICAO).
At the Civil GPS Service Interface Committee meeting in Portland, Oregon, on September 20, Sergey Revnivykh, Deputy Director General of Roscosmos’s Central Research Institute of Machine Building, reported on the status and future of GLONASS.
He provided a number of details on the present constellation and how it will be augmented in the future, stressing that GLONASS is doing well and that a full constellation of 24 primary satellites will be in operation within months. The average signal-in-space range error has improved by a factor of five in the past three years and presently stands at about 1.8 meters (one sigma).
Figure 1. The GLONASS satellite generations through GLONASS-K2.
The present constellation consists of 20 healthy satellites with two reserve satellites, GLONASS 714 and 726. Revnivykh stated that GLONASS 726 had a failure of its navigation payload. It is known that the signal generator on the satellite is faulty and it had been set unhealthy since August 31, 2009. Nevertheless, it was placed in reserve status on March 19, 2010. GLONASS 714 is nominally healthy and could be brought back to service if needed. These initial reserve satellites are also being used to train the ground team to operate spare satellites in a full or nearly full constellation.
GLONASS 727, in orbital slot 3, which was taken out of service on September 8, has also had a failure of its navigation payload and may not be returning to service. The three new satellites launched on September 2 are expected to enter service in early October. About 11 more GLONASS-M satellites will be launched by the end of 2012.
Revnivykh announced that there will be two versions of the new GLONASS-K satellites: GLONASS-K1 and GLONASS-K2. GLONASS-K1 satellites will have a 10-year design life and a daily clock stability of 5 x 10-14.
The first GLONASS-K1 satellite will be launched this December from the Plesetsk Cosmodrome about 800 kilometers north of Moscow. This will be the first launch of a GLONASS satellite from other than the Baikonur Cosmodrome. Only one more GLONASS-K1 satellite will be built and launched after that. The K1 satellites will test an open service CDMA signal on the GLONASS L3 frequency in the 1205 MHz band. Although the launch of the first GLONASS-K1 satellite will occur in December, the design process for the CDMA signal structure is not yet finished, according to a subsequent e-mail message from Dr. Revnivykh. When the process is completed, the structure will be made public.
A completely new design, GLONASS-K2, will start launching in 2013. GLONASS-K2 satellites will have a 10-year design life and a daily clock stability of 1 3 10-14. Besides the CDMA signals on L3, CDMA signals will also be transmitted on L1 and L2. The GLONASS-K satellites will transmit the legacy FDMA satellites in addition to the CDMA signals.
A modernized GLONASS-K satellite, GLONASS-KM, for launch after 2015, is now under study. In addition to transmitting legacy FDMA signals on L1 and L2 and CDMA signals on L1, L2, and L3, CDMA signals may also be transmitted on the GPS L5 frequency at 1176.45 MHz. Also being studied is an alternative to the present three-plane, equally spaced satellite constellation. A different constellation design would be possible using CDMA signals. Such a move would require that the legacy FDMA signals be switched off. Revnivykh stated that any such move would require at least 10 years’ advance notice.
The signals that will be transmitted by the future generations of GLONASS satellites as well as those transmitted by the initial GLONASS satellites and the GLONASS-M satellites now on orbit are shown in Figure 2.
Figure 2. Signals transmitted by the different generations of GLONASS satellites. OF 5 open-access FDMA, SF 5 special (military) FDMA, OC 5 open-access CDMA, OCM 5 open-access CDMA modernized.
Revnivykh also spoke on the satellite-based augmentation system under development, System for Differential Correction and Monitoring (SDCM). Correction and integrity data will be transmitted by Luch geostationary communication satellites now under development. Luch 5A, to be launched in 2011 and positioned at 16°W longitude, and Luch 5B, to be launched in 2012 and positioned at 95°E longitude, will transmit signals on an L1 frequency. Luch 4, to be launched in 2013 and positioned at 167°E longitude, will transmit on two frequencies. The three satellites will provide almost global coverage. The satellite payloads are under development.
According to Revnivykh, the SDCM will make use of 12 monitor stations currently in operation in Russia and one in Antarctica at Russia’s Bellingshausen research station. However, the SDCM website indicates only 10 Russian stations currently in the test network. This anomaly might be explained by the fact that some locations have multiple monitor stations. Eight more monitor stations will be added in Russia and five more outside Russia. Revnivykh showed a map revealing the locations of the additional overseas stations as Cuba, Brazil, Vietnam, Australia, and an additional station in Antarctica. It is not intended, at least initially, that these stations would be used in generating the orbit and clock data broadcast by the GLONASS satellites themselves.
Finally, Revnivykh stated that a GLONASS performance document will be released in the 2012–2013 time frame. His full presentation is available on the U.S. Coast Guard Navigation Center website (www.navcen.uscg.gov).
Meanwhile, the three GLONASS-M satellites launched on September 2 have arrived at their designated orbital slots: GLONASS 736, plane 2, slot 9; 737, plane 2, slot 12; 738, plane 2, slot 16.
The operating frequencies are not yet fully known. GLONASS 736, in physical slot 09, is currently undergoing experimental tests. It is included in the broadcast almanac at slot 16 and is transmitting on frequency channel -6. Stations in the International GNSS Service ground network are tracking the satellite. According to the Roscosmos Information-Analytical Centre, when the tests are completed, GLONASS 736 will transmit on channel -2 and be identified as slot 09 in the almanac. It is unclear if GLONASS 736 will replace GLONASS 722 also currently in slot 9, with the latter becoming a spare, or if GLONASS 736 will become the spare as previously inferred.
GLONASS 737 and 738 have not started normal transmissions. Their assigned shared frequency channel is not yet known but -6 would be a likely candidate.
Future GPS Control Segment Advances
The Raytheon Company team developing the next-generation GPS Advanced Control Segment (OCX) successfully completed on schedule an integrated baseline review with the U.S. Air Force.
When completed, GPS OCX will deliver a control segment designed to provide secure, accurate, and reliable navigation and timing information to military, commercial, and civil users. Raytheon is the prime contractor on the $886 million program. The team includes ITT, The Boeing Company, Infinity Systems Engineering, Braxton Technologies, and NASA’s Jet Propulsion Laboratory.
Power Flex Positive
From September 7 to 12, the U.S. Air Force Space Command (AFSPC) activated the long-awaited Flex Power demonstration for GPS, a power increase on L1 and L2. The trial of a new capability designed for military use under special circumstances was deemed a success, essentially going off without a hitch, according to Colonel David Buckman, AFSPC Command Lead for PNT, and Colonel Bernie Gruber, GPS Wing Commander.
Officially, the flex power assessment ensured that the GPS control segment baseline (AEP 5.5) is properly integrated with the space segment with regard to command and control of High-Y Flex Power, a capability that increases the nominal transmit power of the desired signal by shifting power between signals (M-code and P(Y)) within a particular L-band. The net sum gain remains the same. High-Y Flex Power does not change total transmit power, does not affect phase stability between L1 and L2, is ICD-GPS-200E compliant, and does not affect the navigation message.
Only a handful of 10-year-old reference receivers may have been adversely affected, possibly due to an outdated algorithm. Many government, commercial, and civil agencies were involved in the test, and hundreds of GPS receivers were closely monitored. As far as impacts to the overwhelming majority of global users, it was a non-event. The 2nd Space Operations Squadron (2SOPS) was able, over the course of five days, to make power changes to several GPS satellites without causing a phase shift and without the majority of users even knowing what was happening, although various announcements and press releases had appeared to alert them of the fact.
All GPS satellites and signals have now returned to their normal power levels.
Air Force Fends off GAO Zinger
The U.S. Government Accountability Office has issued a follow-up to its alarming and much-criticized report, issued 16 months ago, on the health and prospects of the GPS constellation. Senior officers at the Air Force Space Command and Space and Missile Systems Center have characterized the new report as “overly pessimistic.”
The report’s principal findings — that the Air Force continues to face challenges in launching its satellites as scheduled, which could affect the availability of the baseline GPS constellation, that on-orbit performance of IIF satellites remains uncertain, that a disconnect exists between GPS III and OCX, and that a predicted possible delay in GPS III could affect GPS constellation performance — are discussed and rebutted in detail by GPS World defense editor Don Jewell, with further commentary (paraphrased) by Air Force Space Command, in his October column.
New Galileo ICD Embraced
European Commission (EC) officials held a briefing during ION-GNSS in Portland for industry representatives, to discuss the new Galileo Open Service Signal-in-Space Interface Control Document (OS SIS ICD). Hosts Paul Verhoef and Michel Bosco said they were pleased with what they characterized as positive feedback from U.S., European, and Japanese industry representatives regarding collaboration and consultation over changes made in the ICD. The updated version is available.
The EC grants free access to the technical information on the future Galileo open service signal: the specifications manufacturers and developers need to process data received from satellites. Anyone who wishes to use the intellectual property rights contained in the document simply needs to send an e-mail to [email protected] mentioning their request for a license agreement, which is without any exclusivity or geographic limitation.
FAA Green-Lights ADS-B
The U.S. Federal Aviation Administration (FAA) gave the go-ahead signal for full-scale, nationwide deployment of the satellite-based surveillance system called Automatic Dependent Surveillance – Broadcast (ADS-B) following its successful roll-out at four key sites. Air traffic controllers are now able to use the new technology to separate aircraft in areas with ADS-B coverage. Controller screens in those areas will show aircraft tracked by radar as well as aircraft equipped with ADS-B avionics, which broadcast their positions.
The new system tracks aircraft with greater accuracy, integrity, and reliability than the current radar-based system, the FAA said. ADS-B targets on controller screens update more frequently than radar and display information including aircraft type, call sign, heading, altitude, and speed.
Nationwide ADS-B coverage is scheduled to be complete in 2013. According to the FAA, every part of the country now covered by radar will have ADS-B coverage. More than 300 of the approximate 800 ADS-B ground stations that will comprise the entire network have been installed.
By 2020, aircraft flying in controlled airspace in the U.S. must be equipped with ADS-B avionics that broadcast their position.
As this issue goes to press in late August, the first Japan Aerospace Exploration Agency Quasi-Zenith Satellite System (QZSS) space
vehicle, nicknamed Michibiki, holds steady for a September 11 launch.
QZSS will use multiple satellites in inclined orbits, placed so that one satellite always appears near zenith above Japan, well known for its high-rise cities. The design provides high-accuracy satellite positioning service covering almost all of the country, including urban canyons and mountainous terrain.
QZSS Phase One will validate technological enhancement of GPS availability, performance, and application. Phase Two will demonstrate full system capability using three QZSS satellites, including Michibiki.
The satellites will generate and transmit their own signals, compatible with modernized GPS signals. QZSS also transmits GPS corrections and availability data.
Michibiki Profile. Dual-box shape with wing-type solar-array paddles; overall dimensions, 2.9 x 3.1 x 6.2 meters, paddles extending 25.3 meters; weight approximately 4,000 kilograms; altitude approximately 32,000–40,000 kilometers; inclination approximately 40 degrees;
period, 23 hours 56 minutes.
Compass. In early August, the first Beidou/Compass inclined geosynchronous orbit (IGSO) satellite achieved near-geosynchronous orbit. The mean east longitude of the sub-satellite ground point is currently 117 degrees, 19 minutes (see figure 1). This is one of the first, if not the first, satellite to use such a highly inclined circular geosynchronous orbit.
Figure 1. Left, the orbit path of three QZSS satellites will eventually keep at least one of them directly over Japan at all times. Right, the inclined geosynchronous orbit of the fifth Compass satellite, launched in July, has a similar ground track and mission goal.
Multi-GNSS Campaign. An international collaboration is poised to take advantage of a coming proliferation of satellites, led by Compass and QZSS but also including GPS, GLONASS, and Galileo, over the Asia/Pacific region. The website www.multignss.asia/campaign.html states, “The Asia and Oceania region is a unique place where the number of usable modernized navigation satellites will increase much faster than other areas in the world. We will see great improvement of PNT capability and hence there is a great opportunity to try, test, and validate new receiver hardware, algorithms, and applications in order to address user requirements.”
The web page also carries an animation of the availability of more than 100 GNSS space vehicles that will operate over the region in the next decade. An initial campaign workshop in Bangkok, Thailand, in January drew 195 participants from 18 countries. A second workshop is scheduled for November 21–22 in Melbourne, Australia.
GLONASS September. Three GLONASS-M satellites to be launched on September 2 completed pre-launch testing and mating to the upper stage of the booster rocket at Baikonur Cosmodrome. Numbered 36, 37, and 38, the satellites will constitute the Block 42 triad.
GPS III Design: Done. The Lockheed Martin team developing GPS III has successfully completed the program’s Critical Design Review (CDR) phase, two months ahead of baseline schedule. CDR completion validates the detailed GPS III design to ensure it meets warfighter and civil requirements. It culminates many rigorous assembly, subsystem, element, space vehicle and system-level CDR events, validates the overall design maturity of the GPS III space vehicle, and allows Lockheed Martin to enter production phase. Col. Bernard J. Gruber, U.S. Air Force GPS Wing Commander, certified the completion. Lockheed Martin, ITT, and General Dynamics are working under a $3 billion development and production contract for up to 12 GPS IIIA satellites. The team is on track to launch the first GPS IIIA satellite in 2014.
GPS Interface Specs. New IS-GPS-200E, IS-GPS-705A, and IS-GPS-800A documents have been posted to www.gps.gov/technical.
SVN62 Rubidium Clock. The U.S. Naval Research Laboratory issued a preliminary report on the rubidium atomic clock currently in use on the SVN62 Block IIF satellite. While documenting excellent short-term performance, the report notes anomalous fluctuations in the clock signal with distinct 12-hour and 6-hour periodicities. The exact cause has not been identified although it is speculated that the fluctuations are of thermal origin like SVN-62’s L5 phase variance detected earlier. But note that the clock signal analysis relies only on L1 and L2 measurements.
GPS IIF Got Active. The 50th Space Wing’s 2nd Space Operations Squadron formally took over command and control of the first Block IIF satellite on August 26 from the GPS Wing, and the satellite was set healthy on August 27, making 31 healthy GPS satellites on orbit.
Advisory Board Update
GPS World Editorial Advisory Board member Art Gower has been elected a Lockheed Martin Fellow, an honor recognizing pre-eminent technical individual contributors in the company, delivering mission success and vision by undertaking the most difficult technical challenges facing the company and its customers. Art started his career with IBM Federal Systems Division (now part of Lockheed Martin Integrated Systems and Global Solutions) in 1983, developing displays and performing navigation upload and command and control system engineering for the GPS control segment, and becoming chief engineer for the GPS control segment in 1990. He has spent the majority of his career working on GPS, GNSS, and SBAS systems.









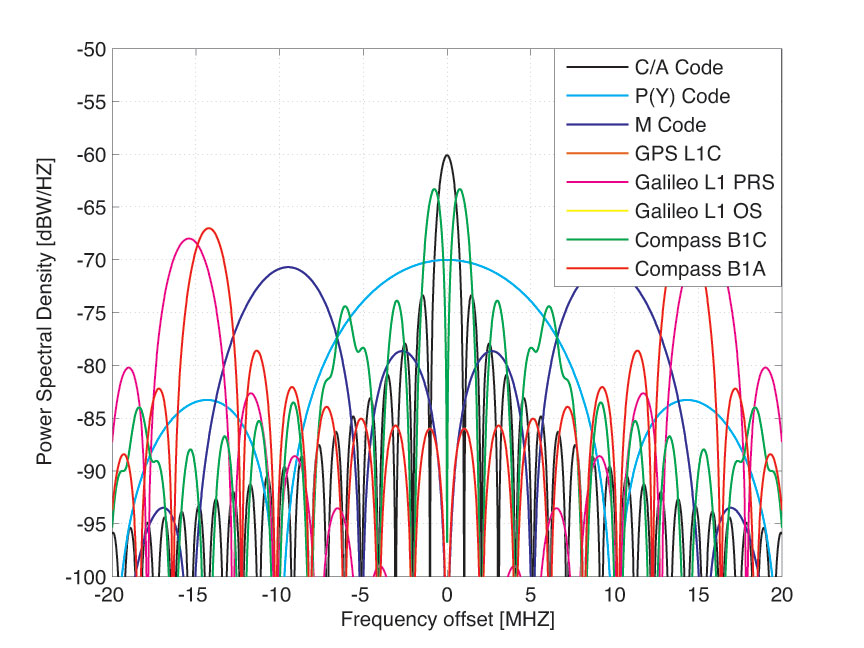
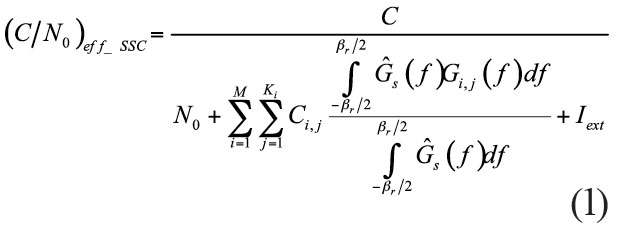
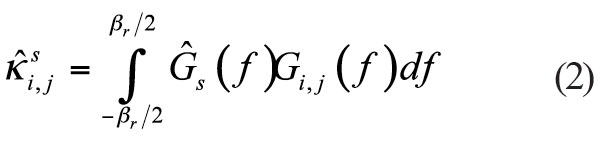
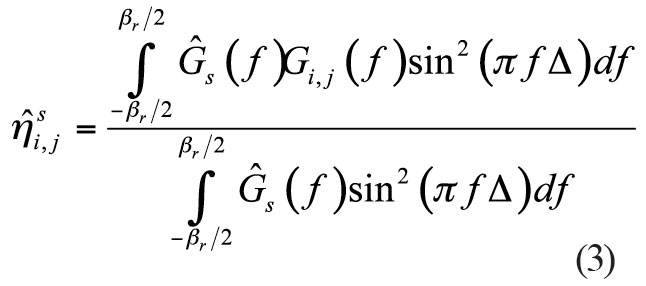




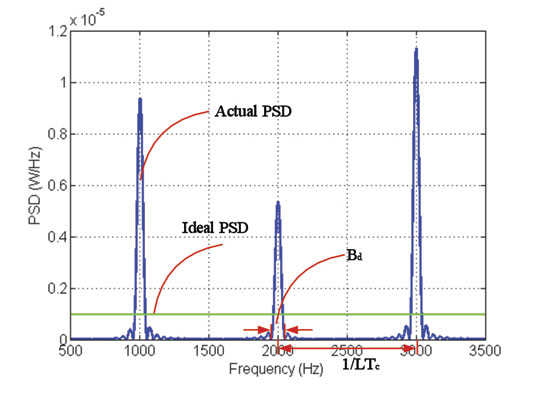

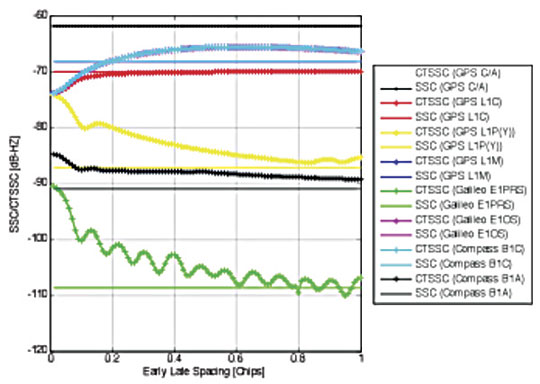
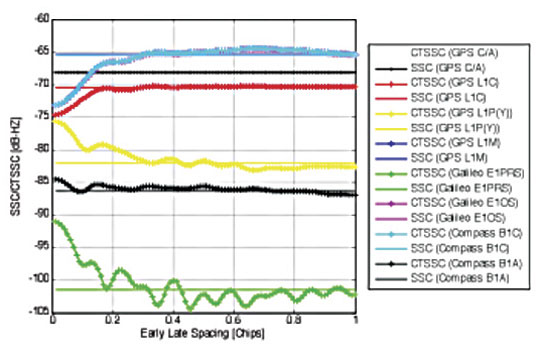





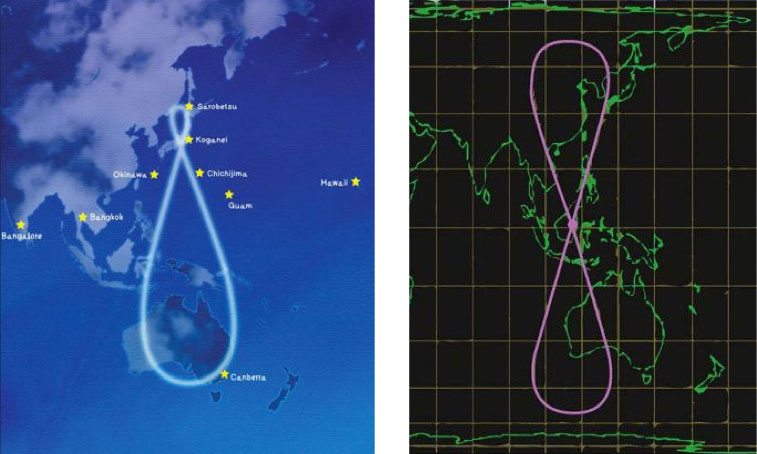
{kind=link}