In a few weeks, we will again observe the tragic anniversary of the 9/11 attacks on the United States. This will mark nearly a full decade since that terrible day that changed the lives of people around the world, forever. Many will remember. Many will mourn. Many will work to ensure that such an event never again threatens any nation. That is a good thing.
Few outside the position, navigation, and timing (PNT) community will also recall that the day before the 9/11 attacks, the U.S. government released a landmark document that described the vulnerabilities of services provided by GPS to disruption, whether by attack or inadvertent interference. The Department of Transportation Volpe Center’s GPS vulnerability assessment recommended that services utilizing GPS-provided PNT seek alternative sources of these services. What decisions and actions have the findings and recommendations of this report promoted? The answer is most disturbing.
The U.S. government has sealed the fate of Loran-C and kept the decision on an enhanced Loran system (eLoran) in limbo for more than 10 years. The government has spent hundreds of thousands (if not millions) of dollars studying the problem over and over again and either ignoring or classifying the results. The Department of Homeland Security (DHS), a direct outcome of the 9/11 attacks, has done nothing to address the need for a national backup other than study and re-study the problem and disregard the findings and warnings of world-class PNT experts.
On the positive side, a recent paper from the Federal Aviation Administration (FAA) attempts to address the problem by proposing to investigate alternative PNT (APNT). While the FAA does this under its Title 49 responsibility and authority to ensure the safety, security, and efficiency of our National Airspace System (NAS), and the alternatives it is looking at are certainly aviation-centric, it is admirable that somewhere in this government someone is finally moving forward to define and implement a real, operational PNT alternative to GNSS and its augmentations. [An abridgement of the FAA paper appeared in the July GPS World; the full paper is available here.]
I applaud the FAA’s actions and only hope that bureaucrats and bureaucratic processes don’t penalize it for its efforts.
But the question remains: When will a decision on the U.S. national PNT backup be made? The urgency of this issue can be highlighted by posing some simple questions about another current threat to the U.S. infrastructure and economy.
To what extent are GNSS-provided PNT services being used to identify the amount and movement of the oil in the Gulf of Mexico? What level of information exactness/integrity would be lost if GNSS-provided PNT services were not available?
To what extent are GNSS-provided PNT services being utilized by cleanup crews and other impact-mitigation services? How would the efficiency of the cleanup/mitigation activities be impeded if GNSS-provided services were not available?
Finally, what is the opportunity cost of not having a national PNT backup? Why has this decision been so hard to make? One would intuit that it has encountered political obstacles, not scientific ones. What are they, exactly?
While the FAA is doing what it must to ensure a safe, secure, and efficient national airspace, what about the rest of us? The boaters, the truckers, the farmers, the power transmission people, the telecom providers, the cell-phone users? The list goes on and on.
It has been nine years. Why is this so hard?
As we take time on September 11 to remember where we were when we heard the news, to mourn those lost, and to do, each in our our way, something to ensure that such a thing never happens again, we should also take time on September 10 to thank the folks at the Volpe Center for their important efforts. And we should try, each in our own way, to do something to ensure that the effects of a loss of GNSS-provided services will be once and for all properly mitigated.
The masked engineer harbors strong convictions, matched by a desire to hold onto a day job.
At press time, GPS spacecraft IIF-1 was set to be launched May 27 from Cape Canaveral Air Force Station in Florida. This first of a new generation of satellites will travel quickly — instead of taking several days to reach its orbital slot, the new satellite should make the journey in three-and-a-half hours.
The new IIFs will broadcast the operational civil L5 signal, intended for safety-of-life applications. It will be compatible with Galileo, GLONASS, and QZSS, with the goal to be interoperable as well. L5 will transmit at a higher power than current civil GPS signals, with wider bandwidth and lower frequency that may enhance indoor reception.
IIF-1 caught its breathless ride aboard a Delta 4 rocket from the United Launch Alliance, a joint venture of Lockheed Martin and Boeing, formed in late 2006.
Earlier GPS satellites rode on smaller Delta 2 rockets that, although reliable, did not possess the oomph to place space vehicles directly into the orbiting constellation, 11,000 miles high. Delta 2s put satellites into highly elliptical orbits looping from as low as 100 miles above Earth at perigee to the 11,000-mile apogee. At a strategic point, a solid-fuel kick motor attached to the satellites pushed them into position for circular orbit on high.
The more powerful Delta 4 will shoot the IIFs directly into their destination slots. Future IIF launches may also use similarly equipped Atlas 5 rockets. The next IIF satellite, GPS IIF-2, could rise aboard an Atlas 5 as early as November.
The IIF generation, manufactured by Boeing for the U.S. Air Force, is designed not only to broadcast the new civil L5 signal, but have a longer design life of 12 years and faster processors with more memory. “These next-generation satellites provide improved accuracy through advanced atomic clocks, a more jam-resistant military signal, and a new civil signal that benefits aviation safety and search-and-rescue efforts,” said Craig Cooning, vice president and general manager, Boeing Space and Intelligence Systems.
“GPS IIF will increase the signal power, precision, and capacity of the system, and form the core of the GPS constellation for years to come,” said Air Force Col. David Madden, GPS Wing commander.
A total of 12 IIF satellites will make their contribution to getting the new L2C and L5 signals closer to operational capability before the GPS III generation takes over, beginning with a 2014 launch.
As the first spacecraft in the GPS IIF series, GPS IIF-1 underwent stringent and comprehensive testing following shipment to the launch site in February. Tests included verification of key satellite functions as well as end-to-end system testing to verify operations between the satellite and the ground control segment at Schriever Air Force Base in Colorado.
Commands were sent from Schriever to GPS IIF-1 at Cape Canaveral to turn on payloads, reprogram processors, and verify interoperability with user receivers and equipment, both civil and military.
Launch of the satellite, originally scheduled for May 20, was delayed four times because of various technical problems.
The European Commission rang up the other day, concerned that a recent column contained misperceptions about the Galileo Open Service Signal-in-Space Interface Control Document (ICD). I replied that if misperception exists, it is shared by at least some in industry. Though the EC has abandoned a plan to charge for licenses, its requirement for a free license and continued talk of patents on the Galileo signal dampen industry enthusiasm for making Galileo receivers, at least in North America.
Herewith, some Brussels counterpoint. “In the previous [ICD] there were some patents characterizing the signal, that could not be commercially exploited. The new publication completely removes these. We now propose a licensing agreement that aims to eliminate any barrier in the wide exploitation of the asset. Both licenses [research and manufacture] are based on non-discrimination. There is no exclusive basis, and they are absolutely free of charge. Furthermore, there is no geographical limitation.
“Regarding the duration of the license, we are assuming 10 years. We believe this is a proper timeframe, considering the lifecycle investment of this sector. A patent can be enforced for 20 years. The patents that we own are already about five or six years old. If you add 10 years, you almost get to the end.
“We ask companies to provide us with information on the use of these patents: whether they are used for high-precision receivers, for testing purposes, and so on. We ask for an update on a yearly basis, for information on the intended use. The only purpose is to have a good grip on the marketing, to guarantee a traceability of market needs, to interpret its evolution in a fast-changing context, and therefore enable the Commission to closely follow and support customer needs. In case a manufacturer will develop some patent on top of our patents, they have to notify us. That is, I believe, standard practice.
“It is not our intention to create barriers to access of this signal. Manufacturers have nothing to fear from providing basic information in these licenses. We want to foster innovation and promote competition.
“It might seem we are a team of lawyers creating problems where there should not be any. I am an aerospace engineer, not a lawyer.
“[Complaints] could be more a point of perception. In concrete terms, we are not much different [than GPS]. We want to keep track of what we are giving away for free. We want the widest possible access to the signals. If there are any doubts, we invite manufacturers to contact us directly to work out any misunderstandings.”
The EC was sincerely surprised to learn of discontent with the process and the patents, and hopes to have further dialog with all manufacturers.
I was puzzled by the patents: why were they taken in the first place? It’s as if you had drawn a line in the sand, from which you now feel unable to back away, even though you might like to, and it’s clearly the best idea. The EC maintains these date from the public-private partnership effort, where intelllectual property rights were (IPR) were for the private sector a non-negligible form of revenue. Since funding has shifted to public money, “the situation has changed, and we have modified our approach.”
The European Commission (EC) has published an updated Galileo Open Service Signal-In-Space Interface Control Document (OS SIS ICD) giving technical specifications and performance expectations for the future system.
As reported by GPS World in October 2009, the EC will not charge for manufacturing licenses. No fees will be required for manufacturers to design, develop, make, or sell receivers capable of using the Galileo Open Service signal. Manufacturers are required to apply for the free licenses, which “will be provided on a non-discriminatory basis in accordance with European Union rules and international commitments.”
To obtain a license, interested parties must e-mail to [email protected], “mentioning their request for a license agreement, which is without any exclusivity or geographical limitation.”
In a section addressing intellectual property rights (IPR), previously the stumbling block towards free-market manufacture and sale of Galileo receivers, the release states that “The information contained in the OS SIS ICD . . . is subject to IPR. The use of [this] information . . . including the spreading codes which are subject to IPR, is hereby allowed for research and development and/or standardisation purposes . . . “ and, in a later section regarding commercial use, “. . . is hereby allowed for manufacturing, distribution, commercialisation, sale of electronic devices (e.g. chipsets and receivers) and supply of Value Added Services.”
Galileo Frequency Plan.
SBAS Woes
In mid-April, Intelsat announced it had lost control of its Galaxy 15 satellite that hosts the WAAS SBAS transponder used by the U.S. Federal Aviation Administration (FAA). Shortly thereafter, the FAA announced that the satellite, one of two used by WAAS, would drift out of usable orbit within two to four weeks.
Once G-15 is out of usable orbit, WAAS will be disrupted for users in northwest Alaska. The rest of the WAAS service area — U.S., Canada, Mexico — will operate normally but will be reduced to a single point of failure with one WAAS broadcasting satellite remaining (PRN 138).
The FAA is investigating at least two alternatives:
Utilize Inmarsat 3 (POR) that was previously used by WAAS before switching to Galaxy 15 in 2006. POR is located at 178°E.
Accelerate the testing of Inmarsat 4-F3 (PRN 133). Testing is already in progress and due to be complete in December 2010. The FAA stated that there is “potential to implement as an emergency release.”
Neither solution is an immediate one. The FAA stated that integrating POR back into operational WAAS would take 12–16 months. The quickest solution is to accelerate the implementation of PRN 133; the FAA said it might be able to shave 1–2 months from original target date.
The FAA stated that with only a single WAAS GEO broadcasting satellite, users may experience a temporary loss of service 3-5 times this year for up to five minutes each while WAAS Uplink Station Switchovers occur.
GAGAN Tumbles. A rocket carrying a satellite-based augmentation system (SBAS) satellite crashed into the Bay of Bengal, deaing a significant blow to India’s GPS-Aided Geo Augmented Navigation (GAGAN) program. The rocket was to deliver the two-ton GSAT-4, which hosted, among other things, an L-band transponder that was to broadcast GPS navigation corrections used by civil aviation and other transportation modes. GAGAN, a program that is years into development, is similar to and compatible with the U.S. WAAS, Europe’s EGNOS, and Japan’s MSAS, designed for next-generation international aviation navigation.
The initiative was using an Indian-designed and -built cryogenic engine on a rocket for the first time. The Hindu News website reported that “India began developing the cryogenic engine as its answer to technology denial regime as the U.S. not only refused the technology but also put pressure on Russia to backtrack on its commitment to New Delhi.”
By Axel van den Berg, Tom Willems, Graham Pye, and Wim de Wilde, Septentrio Satellite Navigation, Richard Morgan-Owen, Juan de Mateo, Simone Scarafia, and Martin Hollreiser, European Space Agency
A fully stand-alone, multi-frequency, multi-constellation receiver unit, the TUR-N can autonomously generate measurements, determine its position, and compute the Galileo safety-of-life integrity.
Development of a reference Galileo Test User Receiver (TUR) for the verification of the Galileo in-orbit validation (IOV) constellation, and as a demonstrator for multi-constellation applications, has culminated in the availability of the first units for experimentation and testing. The TUR-N covers a wide range of receiver configurations to demonstrate the future Galileo-only and GPS/Galileo combined services:
Galileo single- and dual-frequency Open Services (OS)
Galileo single- and dual-frequency safety-of-life services (SoL), including the full Galileo navigation warning algorithms
Galileo Commercial Service (CS), including tracking and decoding of the encrypted E6BC signal
GPS/SBAS/Galileo single- and dual- frequency multi-constellation positioning
Galileo single- and dual-frequency differential positioning.
Galileo triple-frequency RTK.
In parallel, a similar test user receiver is specifically developed to cover the Public Regulated service (TUR-P). Without the PRS components and firmware installed, the TUR-N is completely unclassified.
Main Receiver Unit
The TUR-N receiver is a fully stand-alone, multi-frequency, multi-constellation receiver unit. It can autonomously generate measurements, determine its position, and compute Galileo safety-of-life integrity, which is output in real time and/or stored internally in a compact proprietary binary data format.
The receiver configuration is fully flexible via a command line interface or using the dedicated graphical user interface (GUI) for monitoring and control. With the MCA GUI it is also possible to monitor the receiver operation (see Figure 1), to present various real-time visualizations of tracking, PVT and integrity performances, and off-line analysis and reprocessing functionalities. Figure 2 gives an example of the correlation peak plot for an E5 AltBOC signal.
FIGURE 1. TUR-N control screen.FIGURE 2. E5 AltBOC correlation peak.
A predefined set of configurations that map onto the different configurations as prescribed by the Test User Segment Requirements (TUSREQ) document is provided by the receiver.
The unit can be included within a local network to provide remote access for control, monitoring, and/or logging, and supports up to eight parallel TCP/IP connections; or, a direct connection can be made via one of the serial ports.
Receiver Architecture
The main receiver unit consists of three separate boards housed in a standard compact PCI 19-inch rack. See Figure 3 for a high-level architectural overview.
FIGURE 3. Receiver architecture.
A dedicated analog front-end board has been developed to meet the stringent interference requirements. This board contains five RF chains for the L1, E6, E5a/L5, E5b, and E5 signals. Via a switch the E5 signal is either passed through separate filter paths for E5a and E5b or via one wide-band filter for the full E5 signal. The front-end board supports two internal frequency references (OCXO or TCXO) for digital signal processing (DSP).
The DSP board hosts three tracker boards derived from a commercial dual-frequency product family. These boards contain two tracking cores, each with a dedicated fast-acquisition unit (FAU), 13 generic dual-code channels, and a 13-channel hardware Viterbi decoder. One tracking core interacts with an AES unit to decrypt the E6 Commercial Service carrier; it has a throughput of 149 Mbps.
Each FAU combines a matched filter with a fast Fourier transform (FFT) and can verify up to 8 million code-frequency hypotheses per second. Each of the six tracker cores can be connected with one of the three or four incoming IF streams. To simplify operational use of the receiver, two channel-mapping files have been defined to configure the receiver either for a 5-frequency 13-channel Galileo receiver, or for a dual-frequency 26-channel Galileo/GPS/SBAS receiver. Figure 4 shows all five Galileo signal types being tracked for nine visible satellites at the same time.
FIGURE 4. C/N0 plot with nine satellites and all five Galileo signal types: L1BC (green), E6BC (blue), E5a (red), E5b (yellow), and E5 Altboc (purple).
The receiver is controlled using a COTS CPU board that also hosts the main positioning and integrity algorithms. The processing power and available memory of this CPU board is significantly higher than what is normally available in commercial receivers. Consequently there is no problem in supporting the large Nequick model used for single-frequency ionosphere correction, and achieving the 10-Hz update rate and low latency requirements when running the computationally intensive Galileo integrity algorithms. For commercial receivers that are normally optimized for size and power consumption, these might prove more challenging.
The TUR project included development of three types of Galileo antennas:
a triple-band (L1, E6, E5) high-end antenna for fixed base station applications including a choke ring;
a triple-band (L1, E6, E5) reference antenna for rover applications;
a dual-band (L1, E5b) aeronautic antenna for SOL applications
Figure 5 shows an overview of the main interfaces and functional blocks of the receiver, together with its antenna and a host computer to run the MCA software either remotely or locally connected.
FIGURE 5. TUR-N with antenna and host computer.
Receiver Verification
Currently, the TUR-N is undergoing an extensive testing program. In order to fully qualify the receiver to act as a reference for the validation of the Galileo system, some challenges have to be overcome. The first challenge that is encountered is that the performance verification baseline is mainly defined in terms of global system performance. The translation of these global requirements derived from the Galileo system requirements (such as global availability, accuracy, integrity and continuity, time-to-first/precise-fix) into testable parameters for a receiver (for example, signal acquisition time, C/N0 versus elevation, and so on) is not trivial. System performances must be fulfilled in the worst user location (WUL), defined in terms of dynamics, interference, and multipath environment geometry, and SV-user geometry over the Galileo global service area.
A second challenge is the fact that in the absence of an operational Galileo constellation, all validation tests need to be done in a completely simulated environment. First, it is difficult to assess exactly the level of reality that is necessary for the various models of the navigation data quality, the satellite behaviour, the atmospheric propagation effects, and the local environmental effects. But the main challenge is that not only the receiver that is being verified, also the simulator and its configuration are an integral part of the verification. It is thus an early experience of two independent implementations of the Galileo signal-in-space ICD being tested together. At the beginning of the campaign, there was no previously demonstrated or accepted test reference.
Only the combined efforts of the various receiver developments benchmarked against the same simulators together with pre-launch compatibility tests with the actual satellite payload and finally IOV and FOC field test campaigns will ultimately validate the complete system, including the Galileo ground and space segments together with a limited set of predefined user segment configurations. (Previously some confidence was gained with GIOVE-A/B experimental satellites and a breadboard adapted version of TUR-N). The TUR-N was the first IOV-compatible receiver to be tested successfully for RF compatibility with the Galileo engineering model satellite payload.
Key Performances
Receiver requirements, including performance, are defined in the TUSREQ document.
Antenna and Interference. A key TUSREQ requirement focuses on receiver robustness against interference. It has proven quite a challenge to meet the prescribed interference mask for all user configurations and antenna types while keeping many other design parameters such as gain, noise figure, and physical size in balance. For properly testing against the out-of-band interference requirements, it also proved necessary to carefully filter out increased noise levels created by the interference signal generator.
Table 2 gives an overview of the measured values for the most relevant Antenna Front End (AFE) parameters for the three antenna types. Note: Asymmetry in the AFE is defined as the variation of the gain around the centre frequency in the passband. This specification is necessary to preserve the correlation peak shape, mainly of the PRS signals.
The gain for all antenna front ends and frequencies is around 32 dB. Figures 6 and 7 give an example of the measured E5 RHCP radiating element gain and axial ratio against theta (the angle of incidence with respect to zenith) for the high-end antenna-radiating element. Thus, elevation from horizontal is 90-theta.
UERE Performance. As part of the test campaign, TUR performance has been measured for user equivalent range error (UERE) components due to thermal noise and multipath.
TUSREQ specifies the error budget as a function of elevation, defined in tables at the following elevations: 5, 10, 15, 20, 30, 40, 50, 60, 90 degrees. The elevation dependence of tracking noise is immediately linked to the antenna gain pattern; the antenna-radiating element gain profiles were measured on the actual hardware and loaded to the Radio Frequency Constellation Simulator (RFCS), one file per frequency and per antenna scenario. The RFCS signal was passed through the real antenna RF front end to the TUR. As a result, through the configuration of RFCS, real environmental conditions (in terms of C/N0) were emulated in factory.
The thermal noise component of the UERE budget was measured without multipath being applied, and interference was allowed for by reducing the C/N0 by 3 dB from nominal. Separately, the multipath noise contribution was determined based on TUSREQ environments, using RFCS to simulate the multipath (the multipath model configuration was adapted to RFCS simulator multipath modeling capabilities in compliance with TUSREQ). To account for the fact that multipath is mostly experienced on the lower elevation satellites, results are provided with scaling factors applied for elevation (“weighted”), and without scaling factors (“unweighted”). In addition, following TUSREQ requirements, a carrier smoothing filter was applied with 10 seconds convergence time.
Figure 8 shows the C/N0 profile from the reference antenna with nominal power reduced by 3 dB. Figure 9 shows single-carrier thermal noise performance without multipath, whereas Figure 10 shows thermal noise with multipath. Each of these figures includes performance for five different carriers: L1BC, E6BC, E5a, E5b, and E5 AltBOC, and the whole set is repeated for dual-frequency combinations (Figure 11 and Figure 12).
FIGURE 8. Reference antenna, power nominal-3 dB, C/N0 profile.FIGURE 9. Reference antenna, power nominal-3 dB, thermal noise only, single frequency.FIGURE 10. Reference antenna, power nominal-3 dB, thermal noise with multipath, single frequency.FIGURE 11. Reference antenna, power nominal-3 dB, thermal noise only, dual frequency.FIGURE 12. Reference antenna, power nominal-3 dB, thermal noise with multipath, dual frequency.
The plots show that the thermal noise component requirements are easily met, whereas there is some limited non-compliance on noise+multipath (with weighted multipath) at low elevations. The tracking noise UERE requirements on E6BC are lower than for E5a, due to assumption of larger bandwidth at E6BC (40MHz versus 20MHz). Figures 9 and 10 refer to UERE tables 2 and 9 of TUSREQ. The relevant UERE requirement for this article is TUSREQ table 2 (satellite-only configuration). TUSREQ table 9 is for a differential configuration that is not relevant here.
UERRE Performance. The complete single-frequency range-rate error budget as specified in TUSREQ was measured with the RFCS, using a model of the reference antenna. The result in Figure 13 shows compliance.
FIGURE 13. UERRE measurements.FIGURE 14. L1 GPS CA versus E5 AltBOC position accuracy (early test result).
Position Accuracy. One of the objectives of the TUR-N is to demonstrate position accuracy. In Figure 14 an example horizontal scatter plot of a few minutes of data shows a clear distinction between the performances of two different single-frequency PVT solutions: GPS L1CA in purple and E5AltBOC in blue. The red marker is the true position, and the grid lines are separated at 0.5 meters. The picture clearly shows how the new E5AltBOC signal produces a much smoother position solution than the well-known GPS L1CA code. However, these early results are from constellation simulator tests without the full TUSREQ worst-case conditions applied.
FIGURE 14. L1 GPS CA versus E5 AltBOC position accuracy (early test result).
The defined TUSREQ user environments, the basis for all relevant simulations and tests, are detailed in Table 3. In particular, the rural pedestrian multipath environment appears to be very stringent and a performance driver.
This was already identified at an early stage during simulations of the total expected UERE and position accuracy performance compliance with regard to TUSREQ, summarized in Table 4, and is now confirmed with the initial verification tests in Figure 10. UERE (simulated) total includes all other expected errors (ionosphere, troposphere, ODTS/BGD error, and so on) in addition to the thermal noise and multipath, whereas the previous UERE plots were only for selected UERE components. The PVT performance in the table is based on service volume (SV) simulations.
The non-compliances on position accuracy that were predicted by simulations are mainly in the rural pedestrian environment. According to the early simulations:
E5a and E5b were expected to have 43-meter vertical accuracy (instead of 35-meter required).
L1/E5a and L1/E5b dual-frequency configurations were expected to have 5-meter horizontal, 12-meter vertical accuracy (4 and 8 required).
These predictions appear pessimistic related to the first position accuracy results shown in Table 5. On single frequency, the error is dominated by ionospheric delay uncertainty. These results are based on measurements using the RFCS and modeling the user environment; however, the simulation of a real receiver cannot be directly compared to service-volume simulation results, as a good balance between realism and worst-case conditions needs to be found. Further optimization is needed on the RFCS scenarios and on position accuracy pass/fail criteria to account for DOP variations and the inability to simulate worst environmental conditions continuously.
Further confirmations on Galileo UERE and position accuracy performances are expected after the site verifications (with RFCS) are completed, and following IOV and FOC field-test campaigns.
Acquisition. Figure 15 gives an example of different signal-acquisition times that can be achieved with the TUR-N after the receiver boot process has been completed. Normally, E5 frequencies lock within 3 seconds, and four satellites are locked within 10 seconds for all frequencies. This is based on an unaided (or free) search using a FAU in single-frequency configurations, in initial development test without full TUSREQ constraints.
FIGURE 15. Unaided acquisition performance.
When a signal is only temporarily lost due to masking, and the acquisition process is still aided (as opposed to free search), the re-acquisition time is about 1 second, depending on the signal strength and dynamics of the receiver. When the PVT solution is lost, the aiding process will time out and return to free search to be robust also for sudden user dynamics.
More complete and detailed time-to-first-fix (TTFF) and time-to-precise-fix (TTPF), following TUSREQ definitions, have also been measured.
In cold start the receiver has no prior knowledge of its position or the navigation data, whereas in warm start it already has a valid ephemeris in memory (more details on start conditions are available in TUSREQ). Table 6 shows that the acquisition performances measured are all compliant to TUSREQ except for warm start in E5a single frequency and in the integrity configurations. However, when the navigation/integrity message recovery time is taken off the measurement (as now agreed for updated TUSREQ due to message limitations), these performances also become compliant.
Specific examples of statistics gathered are shown in figures 16–21, these examples being for dual-frequency (E5b+L1) with integrity configuration. The outliers, being infrequent results with high acquisition times, are still compliant with the maximum TTFF/TTPF requirements, but are anyway under further investigation.
FIGURE 16. TTFF cold-start performance, dual frequency with integrity E5b+L1.FIGURE 17. TTFF cold-start distribution, dual frequency with integrity E5b+L1.FIGURE 18. TTPF cold-start performance, dual frequency with integrity E5b+L1.FIGURE 19. TTPF cold-start distribution, dual frequency with integrity E5b+L1.FIGURE 20. TTFF warm-start performance, dual frequency with integrity E5b+L1.FIGURE 21. TTFF warm-start distribution, dual frequency with integrity E5b+L1,
Integrity Algorithms. The Galileo SoL service is based on a fairly complex processing algorithm that determines not only the probability of hazardous misleading information (PHMI) based on the current set of satellites used in the PVT computation (HPCA), but also takes into consideration the PHMI that is achieved when one of the satellites used in the current epoch of the PVT computation is unexpectedly lost within the following 15 seconds. PHMI is computed according to alarm limits that are configurable for different application/service levels. These integrity algorithms have been closely integrated into the PVT processing routines, due to commonality between most processing steps.
Current test results of the navigation warning algorithm (NWA) indicate that less than 10 milliseconds of processing time is required for a full cycle of the integrity algorithms (HPCA+CSPA) on the TUR-N internal CPU board. Latency of the availability of the integrity alert information in the output of the receiver after it was transmitted by the satellite has been determined to be below 400 milliseconds. At a worst-case data output rate of 10 Hz this can only be measured in multiples of 100 millisecond periods. The total includes 100 milliseconds of travel time of the signal in space and an estimated 250 milliseconds of internal latency for data-handling steps as demodulation, authentication, and internal communication to make the data available to the integrity processing.
Conclusions
The TUR-N is a fully flexible receiver that can verify many aspects of the Galileo system, or as a demonstrator for Galileo/GPS/SBAS combined operation. It has a similar user interface to commercial receivers and the flexibility to accommodate Galileo system requirements evolutions as foreseen in the FOC phase without major design changes.
The receiver performance is in general compliant with the requirements. For the important safety-of-life configuration, major performance requirements are satisfied in terms of acquisition time and position accuracy.
The receiver prototype is currently operational and undergoing its final verification and qualification, following early confirmations of compatibility with the RFCS and with the Galileo satellite payload.
“This is an event where one gets one’s goals for the next year.” Paul Verhoef, program director for satellite navigation programs of the European Commission, may have exaggerated for effect, and for the benefit of his audience and hosts at the Munich Satellite Navigation Summit in March. But not by much.
The conference, now in its eighth year, has assumed increasing importance on the international circuit of GNSS policymakers and communicators. Although with a decidedly European bent, it draws representatives from most if not all systems to mingle and present. A 16-member delegation from China’s Compass system furnished one of the liveliest topics of conversation — and speculation.
“When we started in 2003, there were many technical conferences on the one side, and we saw a niche for the institutional and political side of satellite navigation,” said Berned Eissfeller of the Institute of Geodesy and Navigation, German Federal Armed Forces University, conference director and host. You can watch video clips of Eissfeller and other speakers.
GNSS came in for a check-up, a sort of self-examination this time. The 2009 conference was titled “The GNSS Race,” but this year it was “GNSS — Quo Vadis?” The Latin phrase means “Where are you going?” Following program updates, sessions focused on safety-of-life, compatibility, legal/intellectual property, and privacy issues.
Galileo. Paul Verhoef continued his remarks that open this story. “I have been given [my goal]: Galileo must succeed.
“You know the world today is not what it was a year ago. It means obviously the financial crisis has had an impact on our economies, on public finance, and therefore I would not be surprised it may leave its mark on satellite navigation. The reason is simple: the systems that are either operating or being deployed are being publicly financed. Galileo is the only system that is financed from a purely civilian budget. All the systems need more than ever to demonstrate their public utility.
“I put it to you that this is an opportunity. As we’ve already heard, there is much to be gained in this market. After the PC, mobile communications, and Internet, satellite navigation is the next breakthrough technology. There are enormous revenues foreseen and already present in this market. There are many jobs possible for those who want to get it, and we think from the European side we have an enormous chance of capitalizing on this among other things by investing in this technology. Therefore, Galileo- and EGNOS-based innovation is certainly politically of interest.
“Obviously, it is not a path of roses. There will no doubt be many more critical questions during these days. However, from our side, we have set our goals. I think they are modest, but they are firm. We want to be the second system of choice. At least in the first instance, we will see where we will go after that. Obviously, this is going to cost a bit of time. I shall invite you, if you get impatient, if the public gets impatient, to look at the history of the other systems. Developing and deploying these other systems is costing time.
“We think that Galileo will meet its deadlines. I think one of the important messages this year, and you have seen it, we are putting things in place. There are contracts in place, there are satellites on order, there are launches on order, there are installations being built — Oberpfaffenhoffen, Fucino, there are others around the world — EGNOS is operational, we’re going to declare the safety-of-life of EGNOS later this year. So we are really moving forward at good speed at the moment.
“We need to win the hearts of the users, the application providers, and the service providers. At the downstream market is the real challenge for these systems. We need to help do that. We are addressing this among other things by providing a more and more reliable schedule for availability of Galileo and EGNOS services.”
Galileo ICD Soon. “We are about to publish in the next couple of weeks the so-called signal-in-space Open Service interface control document, which I know a number of you have waited for a long time.
“We need also to move forward at a political level. In this case, no GNSS system can be credible if it is not backed by a long-term political commitment particularly by its owner. So after the decision of the Parliament and the Council to deploy the system, these two institutions are now clearly called upon to provide us such political long-term commitment that is credible in the eyes of the users.”
GPS. Anthony Russo, director of the U.S. National Space-Based PNT Coordination Office, said “Keeping cards close to the chest in a competitive situation can well become a liability, creating a future need for a re-work or undoing if you paint yourself into a technological corner.” This appeared to refer to China and its Compass system; information has been singularly difficult to obtain on almost every aspect of this budding constellation.
Regarding the April 2009 U.S. General Accountability Office report that forecast gaps in constellation availability, Russo stated, “The GAO will revise its report somewhat. They were using a model that was a little too cautious, one used by the [GPS] Wing. But satellites on orbit have been performing past estimated life. Further, we can turn off secondary payloads to conserve energy onboard satellites [and thus extend life] if needed.”
The next morning, Lt. Col. Liz Roper, Air Force Space Command, gave a status and modernization briefing; the most eagerly awaited development is the launch of the first Block II-F satellite, scheduled for some time in May. She alluded to “a few setbacks” from the August 2009 launch of SVN49 with its well-documented signal problems, but emphasized the episode’s “positive aspects: the relationships we’ve been able to build in seeking solutions to that situation.”
GLONASS. Grigoriy Stupak, deputy general director and general designer on GLONASS systems, briefed the audience in fluent Russian. For a recent launch update, see story below.
Compass. Two of the Chinese delegates spoke in the opening session. Jiao Wenhai from China Satellite Navigation Office did elaborate the basic principles of the Beidou (Compass) system:
openness (“China will widely and thoroughly communicate with other countries on satellite navigation issues.”)
independence
compatibility (“China will pursue solutions to realize compatibility and interoperability with other satellite navigation systems.”)
the frequencies Compass will use: 1561.098, 1207.14, and 1268.52 Mhz in Phase II until 2012; and 1575.42, 1191.795, and 1268.52 in Phase III by 2020.
the general development plan: five geosynchronous, five inclined geosynchronous, and four mid-Earth orbit satellites providing a Chinese regional service using mainly Compass Phase II signals; then development of a global service broadcasting mainly Compass Phase III signals from five GEO, three IGSO, and 27 MEO satellites.
The Chinese speakers displayed a certain disingenuousness in giving verbally and in their slides the location of the January launch, Beidou G1 geostationary satellite, as 160 degrees East, somewhere over the open Pacific. When GPS World pointed out that NORAD satellite tracking shows G1 has been repositioned to a slot at 144.5 degrees East longitude, they huddled for several minutes before stating that yes, it had moved to that position and was undergoing in-orbit testing. That spot was previously occupied by Beidou 1D, apparently decommisioned about a year ago due to power problems. 1D currently orbits in graveyard above geostationary altitude.
A personage civilly associated with the U.S. Air Force confirmed the actual G1 location to the magazine, and could only speculate that it was more advantageous to Chinese ground control for monitoring and testing. As to why spokespersons misstated the location, that remains inscrutable.
GLONASS Back in Black
Three GLONASS-M satellites launched on March 1 are expected to enter service on March 22 and March 30, according to deputy general director Grigoriy Stupak’s statement in Munich. This would bring the constellation, according to his calculations, to 23 operational satellites, though two of those are held in reserve.
With 21 satellites broadcasting signals, the system claim 98.5 percent global availability. Block 42 (three more satellites) has an August 2010 launch date, and Block 43 one for November 2010. By December, Stupak predicted 24 active satellites on orbit, for 99.5 percent global availability.
The GLONASS-M satellites have a stated seven-year lifetime. CDMA signals will begin with next-generation GLONASS-K satellites, while FDMA signals continue in parallel. The Russians plan to “reach 5-meter accuracy by 2017, almost equal to accuracy of other GNSS,” and are “paying more attention to differential corrections for integrity monitoring.”
ICG Questions
The International Committee on GNSS (ICG) Working Group on Compatibility and Interoperability invites GPS industry members to fill out a questionnaire, provided online in two formats: as a downloadable MS Word document or a PDF.
The Industry and User Community Questionnaire is designed to obtain worldwide input from industry, academic institutions, and other representatives of the GNSS user community with technical expertise regarding GNSS signals and other system characteristics that aid or hinder the combined use of the signals in applications, equipment, or services. For instance, respondents are asked to grade certain signal characteristics as to their importance in overall interoperability considerations for a particular type of application.
Respondents are asked to e-mail completed questionnaires to the ICG by May 28.
The Russian space agency Roscosmos launched a venerable Proton rocket carrying three GLONASS-M satellites into orbit on December 14. Each 3,000-pound satellite is designed to last seven years. They join a constellation numbering 19 satellites, although only 16 are healthy.
Russian politicians and satnav system managers had hoped to launch six satellites between September and December, to attain a global service level, which requires 24 satellites, eight each in three orbital planes.
However, a payload glitch found aboard one recent satellite after its launch into space forced a return to the factory of three satellites scheduled for launch in September. The three put into orbit this week will now only bolster continuing GLONASS coverage of Russian sovereign territory, which requires 18 operating spacecraft.
The next GLONASS launch is now scheduled for a February 11–20, 2010, window.
The Block 41 GLONASS-M satellites (Nos. 30, 33, and 34) have been placed in Plane 1, which currently has only four healthy satellites. According to Roscosmos, communication has been established with all of the satellites and performance is nominal.
Next Up. Nikolay Testoedov, head of the Reshetnev satellite manufacturing company, said his enterprise plans to produce 17 more GLONASS-M satellites between now and 2013.
“The preproduction flight tests of new series of GLONASS satellites, GLONASS-K, will start in 2011,” said Andrei Buravin, vice head of Russian Institute of Space Device Engineering. The preproduction flight tests of GLONASS-K will be performed together with Reshetnev company.
It is still unclear whether the next-generation of GLONASS satellites will be launched via blocks of three satellites with Proton rockets from Baikonur, or via blocks of two satellites with Soyuz rockets from Plesetsk.
RTCM Supports Loran
It may be moot by the time you read this — the U.S. Coast Guard (USCG) could unplug Loran on January 4 — but the Radio Technical Commission for Maritime Services (RTCM) wrote to Secretary of Homeland Security Janet Napolitano in support of continuing and enhancing Loran service.
The letter asserts that it cannot be accurately certified that termination of the operation of the Loran-C signal will not adversely affect the safety of maritime navigation — counter to opinion issued by the USCG Commandant. The RTCM president states that the Loran-C infrastructure is needed to complete the eLoran system to serve as a backup to the U.S. Global Positioning System (GPS).
New Technique. Researchers have developed a technique to demonstrate a low-cost backward-compatible way to exploit eLoran to make GPS more robust. The method paves a way for the average GPS user to become a GPS+eLoran user. Go to env-gpsworld-integration.kinsta.cloud/loran for the letter and other Loran stories.
Galileo Contract Award Imminent
A contract award for at least eight of the in-orbit validation satellites had been promised for the end of this year by the European Commission (EC), but as this magazine goes to press on December 16, no official announcement has surfaced.
An unconfirmed report in early December claimed that the European Commission and European Space Agency had awarded a contract for eight Galileo satellites to underdog bidder OHB Technology of Germany. However, this report was privately denied and in fact refuted by an EC representative.
The OHB-led consortium includes small-satellite specialist Surrey Satellite Technology Ltd. of Britain, which built and continues to operate the GIOVE-A satellite, Galileo’s first launch. The competing Astrium-Thales Alenia consortium built the second Galileo satellite now in orbit, GIOVE-B.
The report, published on December 4 on the Space News website, asserted that “the European Commission has selected OHB Technology of Germany to build at least eight Galileo navigation and positioning satellites for about 350 million euros ($525 million) in a decision that postpones any award to competitor Astrium Satellites pending further negotiations with Astrium.” Reporter Peter de Selding cites industry officials as his sources.
An EC representative privately denied the report, asserting “it is not true.” An industry source said “It is not confirmed, we are waiting for the decision.”
The rumor created an uproar in the German state of Bavaria, a center for that country’s aerospace industry and government-aided research. Astrium had reportedly planned to perform much of its Galileo work in that region, and the Space News story holds out the expectation that “political pressure will be applied to reverse the ruling in the coming days.” The region is already home to the Galileo Control Center at a German Aerospace Agency (DLR) site.
Block Approach. The two consortia have been negotiating their bids on the contract with the commission and its technical adviser, the European Space Agency (ESA), for 15 months. Initially, the two European Union bodies set a contract ceiling of 840 million euros to build 28 Galileo satellites; un the past few months they revised the total order to 22 satellites and asked for bids for eight, 14, and 22 satellites. Reportedly, there are price ceilings for each of the three potential order sizes — around 400 million euros for eight satellites, 650 million euros for 14 satellites, and 840 million euros for all 22.
Repeatedly postponed throughout its conceptual phase, the Galileo system now — officially, at least — hopes to achieve initial operational capability by 2014.
Whether or not the Space News report is eventually substantiated, the central European government has already signaled in multiple ways its dissatisfaction with its various member states’ aerospace industry giants, whom it holds responsible for the protracted dysfunctionality of the now-abandoned public-private partnership to build Galileo. The EC has largely wrested control of the satellite award process away from its space agency, and indicated that it intends to maintain a firm grip on the purse strings.
Application Days: Galileo Application Days are set for March 3–5, 2010, in Brussels, Belgium, with live demonstrations of cutting-edge applications developed for GNSS under the European Union’s 7th Research Framework Programme (FP7), former ESNC Competitions, the ESA Technology Transfer Programme, and national and regional initiatives. See www.application-days.eu for details.
Roughly three years ago, the U.S. military conducted the first flex-power test on the L2 GPS codeless signal. Almost immediately, the civilian GPS community expressed concern that future changes to the L2P(Y) signal power levels might cause a signal phase shift; such a phase shift would be incompatible with equipment using the P(Y) signals in a codeless/semicodeless fashion for extremely accurate positioning applications.
Civilian users were naturally upset because they had invested millions of dollars in systems that might not be usable — even if the unusable periods were of a very short duration.
The National Positioning, Navigation, and Timing (PNT) Executive Committee responded by tasking the National PNT Engineering Forum (NPEF) to look at the problem. Within a few months, the NPEF announced a solution: flex power could be used in such a manner that it would not cause a phase shift. At the same time, the military reminded civilian users that the codeless use of L2P(Y), as accurate as it might be, was never intended and should not be a long-term solution.
An agreement was reached between the U.S. government and civilian users that the civilian users of this codeless/semicodeless technique would migrate from using the L2P(Y) carrier to using the new L2C signal to achieve not only the same, but better results. To codify this agreement, a Federal Register Notice was issued in 2008 identifying the terms of this agreement, which guaranteed the phase stability of the current L2P(Y) signal until 2020. This gives civilian users 12 years to figure out a migration plan and to obtain adequate use of the equipment they already have on hand.
In addition, 2020 is not a drop-dead date, but a date when the use of L2P(Y) codeless signals will no longer be guaranteed, though may well still work. Who knows what PNT advancements will take place between now and then? This could very well be a moot point by then, and in my opinion should be one now.
Problem Solved? Apparently not. A lag between the issuance of this national policy and analogous adjustments to interface specifications caused consternation within the civilian community. Misunderstandings added to this perceived impasse. Various solutions were identified to work around this looming quandary. However, given the national policy to support codeless/semicodeless use until 2020, the Air Force Space Command commitment to that policy, and the recommendations of the NPEF, these solutions seem wholly unnecessary to me.
The U.S. government has gone well beyond what is required to insure civilian codeless and semi-codeless users are accommodated.
For the foreseeable future, users will be able to employ L2P(Y) codeless/semicodeless techniques for very accurate position determination and will not have to worry about phase shifts disrupting their work.
— Don Jewell, GPS World Defense PNT Contributing Editor
With final satellite construction bids pending as this magazine goes to press, the Galileo program clarified a recent round of launch postponements and announced that the European Union (EU) will rescind its requirement for a special license to manufacture and sell Galileo receivers.
“We have an ambition to become, after GPS, the second system of choice,” stated Paul Verhoef, program manager of the EU satellite navigation programs, at the World Congress of the International Association of Institutes of Navigation (IAIN) on October 28. “In order to reach that, the user market is key. We are currently putting our hands to the last bits and pieces of the documentation [revising the previous Galileo Interface Control Document], to be published in a few weeks’ time. We will no longer require a licensing document in order to manufacture and sell devices. We had to do this bit of work to follow up on the initial [different] preparations made under the public-private partnership.”
Contract by Christmas. The first two in-orbit validation (IOV) satellites will be launched in November 2010, and the next two in April 2011. Verhoef referred to the previous Galileo full operational capability (FOC) date of 2013. “You now know we are not going to meet that date,” said Verhoef.
“We come to the procurement as it stands at this moment. We are procuring the capacity through six main work packages. We are on track to announce the satellite contracts before Christmas, as well as the system support contract. Perhaps the launch contract, but perhaps not until after Christmas. The other contracts are not time-critical at this point, therefore we have delayed them slightly; to be announced in first quarter 2010.
“We have split the total of the 28 satellites we will order into two work orders. In the first, we will procure up to 22 satellites, and in the second the rest. Industry bidders are to submit their best and final offer for 8, 14, and 22 satellites. The most crucial decision in the whole procurement will then be for us to go single-source with one of them, or dual-source with both.”
The final and “best” bids were due to the EU and ESA on November 13 from the two consortia competing to build out the constellation.The EADS Astrium-Thales Alenia Space partnership, larger of the two, has by conventional wisdom the inside track to win the contract. However, the competion, led by OHB of Germany, includes Surrey Satellite Technology Limited (SSTL) of the UK, which has the better track record in Galileo satellite manufacture to date.
“A double supplier would mean spending extra money,” said Verhoef in his IAIN remarks, “but it would bring some risk reduction. Will it be worth the extra money we will have to pay for it? By the end of the year we hope to have the answer for that. By the end of the year we will have under contract the delivery of 22 satellites, and the launch contract. Then we will be able to give a very clear schedule on deployment.
“There remains uncertainty on where it will end. Budget questions depend on parliament and the EC, which will drive the final aspects of the work. We live in difficult economic times, and there are some things to be determined in 2014, when the next funding cycle will begin.
“By the end of 2013, we will have an initial constellation of 16 satellites: four IOV and 12 FOC satellites. This is targeted to provide the open service, and parts of the other services: safety of life, PRS, and commercial. Completion of these will depend on funding questions.”
See the Satellite. An online story on Britain’s BBC News channel contains a two-minute video clip (see PHOTO) showing close-ups of the antennae and other elements of the IOV satellite under manufacture at an EADS Astrium facility in Portsmouth, United Kingdom.
Once completed, the payload will travel to Thales Alenia Space in Rome, Italy, for attachment to the main spacecraft bus, with a propulsion system, avionics, and solar panels, and then go to the European Space Agency (ESA) port in Kourou, French Guiana. Both intial satellites are intended to rise aboard a Russian Soyuz rocket, which has had its own problems recently, with delays due to changes necessary for the ESA launch pad.
System Updates
GPS to Fly Without Back-Up. U.S. President Obama and Congress have removed a key back-up system for GPS. The president signed the Department of Homeland Defense appropriations bill that allows termination of Loran-C in January 2010. Loran-C and modernized eLoran could prevent national and industrial infrastructure breakdown in the event of disruptions, interference, or intentional jamming. The House of Representatives passed a Coast Guard authorization bill calling for Loran termination, in line with the DHS appropriations bill. For details see www.pnt.gov; see also “Letters” in this issue, page 13. The Coast Guard Commandant and DHS are expected to sign off almost immediately that Loran-C can be terminated. Once they sign it, Loran signals could go off the air as early as January 4, 2010.
GLONASS Signal Misbehavior. The planned September and October launches of three new GLONASS-M satellites were scrubbed, and the traditional Christmas launch appears doubtful at best. The Russians have commissioned a special task force to investigate a problem with the signal generator aboard an orbiting satellite, detected in late August. It is not known whether the same problem affects three satellites on the ground, destined for imminent launch.
Beidou’s Second Bird. Beidou G2, launched last April, has drifted 10 degrees from its initial geostationary orbital slot. This may mean that it is uncontrollable and has been abandoned. Such a failure — if it is one — may delay launch of new satellites to begin filling out the Chinese GNSS. As previously reported, demonstration satellite Beidou 1D is also adrift.
Four Galileo in-orbit validation (IOV) satellites scheduled to launch next year have already missed their first pad date.The European version of Russia’s Soyuz rocket is now scheduled to carry the four IOV satellites into orbit in two launches in November 2010 and early 2011, as announced by European Space Agency (ESA) Director-General Jean-Jacques Dordain on October 9.
Both launches had been set for earlier in 2010, but ESA has encountered difficulties with the satellites, built by a consortium led by Astrium Satellites and Thales Alenia Space. Introduction of Russia’s Soyuz rocket at Europe’s Guiana Space Center in French Guiana, on the north coast of South America, has also been repeatedly delayed.
The European Union and ESA plan to select a builder for the remaining 28 satellites late this year. Final bids from 11 companies bidding for on six Galileo work packages are expected by November 11.
Experimental Satellite Moved. In July and August, Surrey Satellite Technology Ltd (SSTL) repositioned GIOVE-A, the first Galileo test satellite, to an orbit 113 kilometers above the orbit that the operational Galileo navigation satellites will occupy.
Since its December 2005 launch, GIOVE-A has achieved all of its mission objectives and remains in excellent condition well beyond its design life of two years, SSTL stated.
The test satellite secured the Galileo frequency filings with the International Telecommunication Union (ITU), collected data to characterise the medium-Earth Orbit (MEO) environment, and flight-proved technologies such as highly accurate atomic clocks.
GIOVE-A remains fully operational, and has sufficient propellant remaining for further maneuvers. A further repositioning exercise may be performed to raise the orbit higher still before GIOVE-A is finally decommissioned.
SSTL and its new owner, OHB of Germany, jointly form one of the two consortia now bidding for the development and construction of 28 satellites for the operational Galileo service.
EGNOS. The European Commission (EC) declared on October 1 the official start of operations by the European Geostationary Navigation Overlay Servic (EGNOS), with its Open Service available free of charge to businesses and consumers. EGNOS is Europe’s first contribution to satellite navigation and a precursor of Galileo, the global satellite navigation system in development.
EGNOS is a satellite-based augmentation system that improves the accuracy of satellite navigation signals over Europe. The system is composed of transponders aboard three geostationary satellites hovering high above the Eastern Atlantic and the European continent, linked to a ground network of about 40 positioning stations and four control centers, all interconnected. The EGNOS ground stations receive signals sent out by GPS satellites. Information on the accuracy and reliability of these signals is relayed to users via the geostationary satellite transponders. This allows them to determine their position to within two meters in real-time, according to EC spokespersons.
The EGNOS coverage area includes most European states and has the built-in capability to be extended to other regions, such as North Africa and European Union neighboring countries.
The commission seeks to support new applications in sectors such as agriculture (high-precision spraying of fertilizers) and transport (for example, automatic road-tolling or pay-per-use insurance schemes). EGNOS can also support much more precise personal navigation services, both for general and specific uses, such as systems to guide blind people and to improve signal reception in urban areas.
EGNOS will be certified for use in aviation and other safety-critical areas in compliance with the Single European Sky regulation. Through EGNOS a safety-of-life service is expected to be in place by mid 2010. This service will provide a valuable warning message informing the user within six seconds in case of a malfunction of the system. A commercial service is under test and will also be made available in 2010.
EGNOS operations are managed by the European Satellite Services Provider, ESSP SaS, a company based in Toulouse, France, founded by seven air navigation services providers. A contract between the EC and ESSP SaS covers management of the EGNOS operations and maintenance until the end of 2013.
The EGNOS Open Service is accessible, without service guarantee or resulting liability, to any user equipped with a GPS/SBAS compatible receiver within the EGNOS coverage area. Most receivers sold today in Europe meet that requirement. No authorization or receiver-specific certification is required.
GLONASS Signal Generates Slip
A planned late-September launch of a three new GLONASS-M satellites from the Baikonur space center was postponed due to a problem with signals emanating from a previously launched GLONASS-M satellites, now on orbit. Initially, a new launch date of October 29 was set by Roscosmos, the Russian space agency, but no word had yet come at press time regarding investigation of a problem with the signal generator aboard the orbiting satellite, detected in late August. The spacecraft was taken out of service on August 31.
GPS Wiggles: SVN49, CNAV
The GPS Wing held an extraordinary session at ION GNSS in Savannah, Georgia, September 23, frankly explaining the SVN 49 satellite’s problem and probable solutions.
SVN49, the IIR-M) + L5 civil-signal satellite, will be set healthy in the coming months and it will be useable, the GPS Wing said. Its L1 an L2 signals contain a pseudorange error that remains within specifications for compliant GPS user equipment.
On the ground, a receiver sees from this satellite both a direct signal and a weaker reflected signal, which looks like a multipath component. According to models, if the direct and reflected L1 signals are in phase at zenith, a standard code-correlating receiver will measure a C/A-code pseudorange that is 1.62 meters too long. The error becomes smaller as the elevation angle drops, reaching zero at an elevation angle of about 42 degrees, and then rising slightly as the elevation angle drops to zero.
During audience input following the Savannah panel presentations, Javad Ashjaee of JAVAD GNSS proposed simply turning the satellite on as is and using it as an opportunity, given the “defined multipath” that it effectively transmits, to study multipath and other phenomena. JAVAD GNSS Triumph receivers have demonstrated the ability to remove almost all anomalies and satellite multipath from the SVN49 signal.
An as-yet-unconfirmed report has it that U.S. Air Force representatives and others, in an informal meeting after the session, came to a provisional agreement as to the best course. However, this has not yet worked its way through channels nor been announced.
New Message. The first test of the CNAV navigation message format to be used in the future on Block IIR-M and IIF satellites was announced at the September CGSIC meeting in Savannah, and will begin soon. A Type 0 message will be broadcast on the L2C signal by SVN49. By the end of the year, this message is to be switched on, on all IIR-M satellites. However, this initial message type will not contain useful information for end users.
Message Type 0 consists of a 12-second, 300-bit long message including the preamble, satellite pseudorandom noise (PRN) number, message type ID (=0), GPS time of week, a sequence of alternating 1s and 0s, and a cyclic redundancy check (CRC) parity block. The GPS time of week will change every 12 seconds, as will the CRC bits.
Penny Axelrad Honored
Penina Axelrad, professor of aerospace engineering sciences at the University of Colorado, received the Institute of Navigation’s 2009 Kepler Award for her “contributions in the field of satellite navigation and dedication to the education of future generations of navigation engineers.”
Axelrad has done advanced research in topics including receiver autonomous GPS integrity monitoring (RAIM), GPS bistatic radar, satellite formation flying using GPS, GPS-based orbit and satellite attitude determination, and multipath characterization, modeling, and mitigation.
She received a Ph.D. in aeronautics and astronautics from Stanford University and S.B. and S.M. degrees from the Massachusetts Institute of Technology. She has taught for 17 years at the University of Colorado.
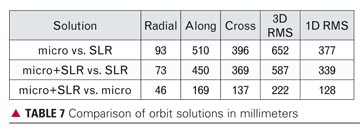
Using Microwaves and Laser Ranging for Precise Orbit Determination
By Erik Schönemann, Tim A. Springer, Michiel Otten, and Matthias Becker
Though Galileo’s GIOVE-A is a test satellite not necessarily ready for scientific use, orbit analyses with a reduced accuracy can help to identify weaknesses and suggest improvements. This month, the authors share work being carried out to precisely determine the orbit of GIOVE-A using SLR and microwave observations. This preliminary investigation will benefit the procedures to be implemented for the future Galileo constellation.
INNOVATION INSIGHTS by Richard Langley
WE USE THEM FOR LISTENING TO MUSIC, for routine surgeries, for making a point in a presentation, and even for hanging pictures straight. Of course, I’m talking about lasers. Invented in 1960, the laser (an acronym for light amplification by the stimulated emission of radiation) has become ubiquitous in modern society. Every CD and DVD player has one. Many printers use them. But lasers are also used in a wide range of industrial and scientific applications including determining the orbits of satellites through satellite laser ranging (SLR).
In the SLR technique, pulses of laser light from a ground reference station are directed at satellites equipped with an array of corner-cube retroreflectors, which direct the pulses back towards a collocated receiving telescope. By accurately measuring the two-way travel times of the pulses and knowing the location of the station and other operating parameters, the positions of the satellites can be determined. A network of SLR reference stations around the globe is used to monitor the orbits of satellites over time and their variations have been used by scientists to improve our knowledge of the Earth’s gravity field; to study the long term dynamics of the solid Earth, oceans, and atmosphere; and even to verify predictions of the General Theory of Relativity.
The first SLR measurements were obtained from the Beacon Explorer-B satellite, which was launched in October 1964. Since then, dozens of satellites equipped with corner-cube retroreflectors have been launched including a number of radio-navigation satellites. Every GLONASS satellite is equipped with retroreflectors and two GPS satellites have been equipped—SVN35/PRN05 and SVN36/PRN06. The COMPASS-M1 satellite in medium Earth orbit carries retroreflectors, as do both GIOVE-A and –B, the Galileo test satellites.
Precise orbit determination of radio-navigation satellites using SLR has the advantage of being unaffected by any onboard satellite electronics and associated signal biases. Radiometric observations of a satellite’s microwave signals, on the other hand, are influenced by the satellite’s clock, for example, and its effect must be estimated to obtain precise (and accurate) satellite orbits for navigation and positioning. Therefore, a comparison of SLR- and microwave-derived orbits can be very useful for studying the performance of the data measurement and orbit-determination processes of both techniques.
In this month’s column, we take a look at some work being carried out to precisely determine the orbit of the GIOVE-A test satellite using SLR and microwave observations. This preliminary investigation will benefit the procedures to be implemented for the future Galileo constellation.
“Innovation” is a regular column that features discussions about recent advances in GPS technology and its applications as well as the fundamentals of GPS positioning. The column is coordinated by Richard Langley of the Department of Geodesy and Geomatics Engineering at the University of New Brunswick, who welcomes your comments and topic i deas. To contact him, see the “Contributing Editors” section on page 6.
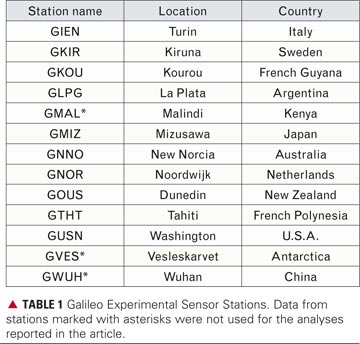
The navigation office of the European Space Operations Centre (ESOC) is engaged in various activities using observations of the Galileo test satellite, GIOVE-A (Galileo In-Orbit Validation Element-A), recorded at the Galileo Experimental Sensor Stations (GESS). The work includes the assessment of the quality and performance of GIOVE satellite observables and the testing and improvement of orbit-determination software. These activities support the long-term goal of advancing the scientific applications of the future Galileo constellation.
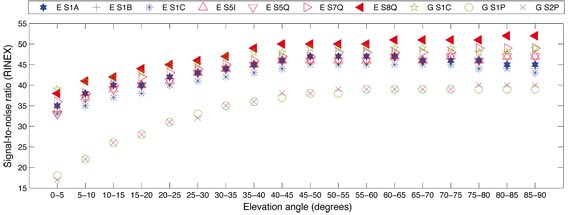
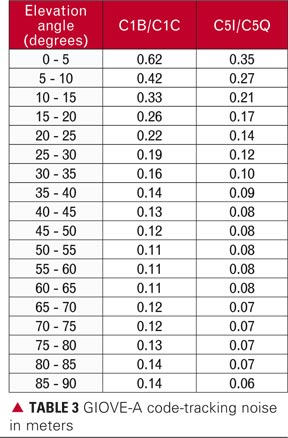
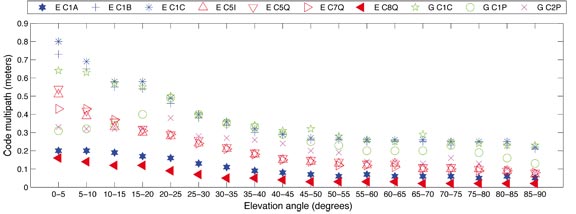
Since the launch of GIOVE-A on December 28, 2005, various tests have been carried out to analyze the quality of the new code (pseudorange) and carrier-phase observables derived from tracking the satellite’s microwave signals. All of these tests demonstrate the advantages of the new signal structure compared to that of legacy GPS signals. In general, the reduction of the noise by factor of 4-5 as well as a reduction of the code multipath by approximately a factor of 1.2 (GPS C1C versus GIOVE-A C1B/C1C) could be seen.
As the comparison of observations is done indirectly (GPS and GIOVE-A have different orbits) and the databases used for most analyses published up to now is sparse, a deeper analysis of the signal quality parameters seems appropriate, especially as data quality has a direct impact on the precision of orbit determination. Our analyses, presented in the first half of this article, are based on a broad base of data from most of the stations in the GESS network. Because of the difficulty in accessing the phase multipath directly, we first evaluated the signal strength and the code multipath, which gave the first hint of the multipath behavior. In order to compare GPS and GIOVE-A data directly, only data received from the same elevation angles and azimuths were used. Subsequently, we present an analysis of the phase residuals derived by precise point positioning.
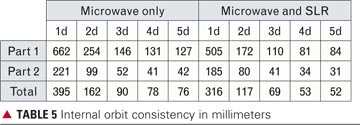
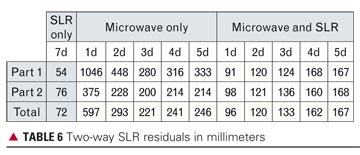
The second part of this article focuses on the precise orbit determination or POD of the GIOVE-A spacecraft. The Navigation Package for Earth Observation Satellites (NAPEOS) software used at the ESOC Navigation Support Office allows microwave (radiometric) and satellite laser ranging (SLR) observations to be used either separately or together. The two methods are different due to different tracking networks and the different sensitivity of the observables to atmospheric effects and in their noise levels. We will present the orbit results focusing on internal orbit consistency checks and SLR validation of the microwave-based orbits.
Data Analysis
We first describe the procedures used for analyzing the microwave data followed by those used for the SLR data.
Microwave Analysis. For the GIOVE-A signal analysis and precise orbit determination we used the RINEX data from all of the GESS stations available from the GIOVE archiving facility (see TABLE 1). All stations are equipped with GPS/Galileo antennas, built by Space Engineering S.p.A. and Galileo Experimental Test Receivers (GETRs), built by Septentrio. The data, containing tracking data of all GPS satellites and the GIOVE-A satellite, is given in the RINEX 3.00 data format with a sampling interval of 1 second. To save on storage space for the long-term analyses, such as orbit determination, the RINEX data is decimated to 30-second samples and Hatanaka-compressed, using a test version of the Hatanaka software for the RINEX 3.00 format.
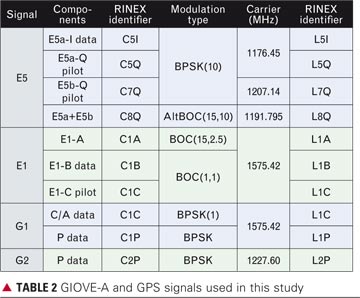
The signal analyses shown here were carried out using GNU Octave, an open-source program for performing numerical computations similar to Matlab, and different scripts developed by the Institut für Physikalische Geodäsie at the Technische Universität Darmstadt. These analyses cover a selection of the designated Galileo signals recorded by the GESS within the time span from December 16 to 27, 2006. Within this time period, the current GPS signals, as well as the GIOVE-A signals E1 and E5, shown in TABLE 2, were recorded. The table also shows the signal components as well as the RINEX observation-type identifiers, which we use in this article.
The stations used for the analyses show a quite similar level of performance in general. There are stations with different behaviors for single signals, as for example GIEN with a stronger code multipath behavior on C1B and C1A, but no station with a considerably different performance level could be identified. The averaging over the data from all sites reduces the station-dependent effects such as multipath and the atmosphere to a large extent, and gives a good indication of the mean signal performance.
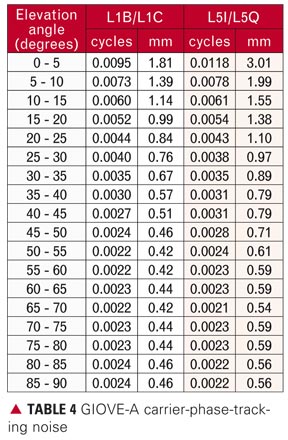
The analyzed phase residuals were taken from the processing carried out for the second part of this article. Hence, they include observation data over an extended period of 149 days and were limited to the GIOVE-A C1C/L1C and C7Q/L7Q signals.
This extended data period is from December 12, 2006 (day of year 346), until May 26, 2007 (day of year 146). During this interval, there is a period where no GIOVE-A data was available due to maintenance of the spacecraft. This gap occurred from February 12 to 28, 2007. So in total we have analyzed 149 days of microwave data. Because there are some differences between the results before and after this gap in February, many of the statistics are given for the first and second part separately. The first part covers December 12, 2006, until February 11, 2007; the second part covers March 1, 2007, until May 26, 2007.
We performed the precise orbit determination using the NAPEOS software, a general-purpose software package for orbit determination, prediction, and control, supporting all phases of an Earth-observation mission in terms of mission preparation and operations.
For the GIOVE-A analysis, the three main NAPEOS programs we used are GnssObs, Bahn, and Multiarc. GnssObs reads, cleans, and decimates the RINEX data and converts the data into the NAPEOS internal tracking-data format. The NAPEOS tracking-data format contains the ionosphere-free linear combination, for both code and phase, of the RINEX observations. For GPS, the ionosphere-free linear combination is based on the combination of C1P and C2P code and L1P and L2P phase measurements. GIOVE-A offers several different observables allowing for many different ionosphere-free observations. For most of the work presented in this article, we have used the ionosphere-free linear combination of the C1C and C7Q and L1C and L7Q observations for code and phase respectively.
The next module, Bahn, performs the parameter estimation. In this step, we use the ionosphere-free code and phase observations at a sampling interval of 5 minutes, and we have applied an elevation angle cut-off of 5 degrees. The data is processed in batches of 24 hours, thus resulting in 1-day-arc solutions. The estimated parameters in these daily solutions are the GIOVE-A state vector (position and velocity), five dynamical orbit parameters from the extended Center for Orbit Determination in Europe (CODE) orbit model, a GIOVE-A clock offset for each epoch, all receiver clock offsets for each epoch, one GPS-GIOVE-A “intersystem bias” parameter per day for each station except for a selected reference station, and the carrier-phase ambiguities (integers not resolved). The station coordinates are estimated but tightly constrained (1 millimeter) to their a priori value. We obtained the a priori station coordinates by combining the full set of daily solutions.
Despite the fact that the 13 GESS stations provide very good global coverage, it is expected that 24-hour solutions will not give the most precise GIOVE-A orbit estimates. To generate longer arc solutions, we have used the Multiarc program. This is a tool that has recently been added to the NAPEOS software package. It allows for a rigorous combination of normal equations, also referred to as normal equation stacking, which are generated by Bahn. During the normal equation combination, the satellite orbit parameters may also be rigorously combined, thus effectively leading to multi-day orbital arcs. For the work presented in this article, we have used Multiarc to generate solutions with arc lengths of 1, 2, 3, 4, and 5 days. We also used Multiarc to compute accurate a priori station coordinates by stacking all available 1-day normal equations.
Satellite Laser Ranging
Besides the 13 GESS stations, GIOVE-A is also tracked by more than 17 different SLR stations around the world. For most periods of the mission, the tracking has been consistent enough to allow for GIOVE-A POD using only the SLR data. As the SLR data is completely independent of the microwave data, the resulting orbit solutions will be to a large extent independent as well and thus can be used to give an indication of the achieved precision of the different microwave solutions.
The orbit determination strategy used for the SLR solutions is very similar to the one used for the microwave orbits with the main difference being the increased arc-length of 7 days. The same satellite parameters are estimated as with the microwave solutions: the GIOVE-A state vector and five dynamical orbit parameters from the extended CODE orbit model. No further parameters need to be estimated and all corrections applied to the SLR data are according to the International Earth Rotation and Reference Systems Service 2003 standards and, for station coordinates, we used those from the rescaled International Terrestrial Reference Frame 2005 solution. As the noise level of the SLR data is very low, the measurements can also be directly used to give an indication of the precision of the radial position components of the different microwave solutions by computing the SLR residuals without using them in the estimation process itself.
Combined Microwave and SLR Analysis. In this step, the SLR data was added to the microwave data in the 24-hour solutions. For the data weighting, we used 100 millimeters for SLR and 1000 millimeters and 10 millimeters for GIOVE-A and GPS code and phase observables respectively. The only change in the analysis strategy in this case was that we now processed the SLR data in 24-hour solutions and not in 7-day batches. All the processing options remained as described in the two previous sections. The resulting 1-day solutions, or rather the associated normal equations, were used in Multiarc to generate combined solutions of different arc lengths.
Microwave Data Quality
We now take a detailed look at the quality of the microwave data in terms of signal-to-noise ratio (SNR), code-tracking noise and multipath, carrier-phase-tracking noise, and carrier-phase residuals.
Signal-to-Noise Ratio. The SNR (or equivalently carrier-to-noise-density ratio, C/N0) is strongly dependent on the satellite transmitter, the signal path through the atmosphere, and the receiver configuration (ground station, antenna, receiver, cable, etc.). Hence the SNR cannot be seen as an absolute value. The SNR is specific to the position, the equipment, and the time. Furthermore, the determination of the SNR values depends on the receiver and the firmware used. As a result, SNR values from different receivers cannot be readily compared. Nevertheless, using only one type of receiver, assuming similar effects on all the different signals at the same epoch, and taking averages over a long time span, we expect the relationships among the signals to be constant. Based on this assumption, we can use the SNR values given in the GESS RINEX files without adjustment.
To compare the GPS with the GIOVE-A SNR values, we ordered the corresponding SNR values of all stations on all days by satellite position into a grid with widths of 5 degrees in azimuth and 5 degrees in elevation angle. For the evaluation, we took the grid cells occupied by both GPS and GIOVE-A values and computed the median over all the cells of equal elevation angle. The median per elevation-angle bin for each signal is shown in FIGURE 1.
FIGURE 1. Signal-to-noise ratio, GPS versus GIOVE-A
As can be seen from the figure, the signal strength of the GIOVE-A C8Q observable ranks best, followed by the GPS C1C, GIOVE-A C7Q, C5I/C5Q, C1A, and C1B/C1C. The weakest signal is found for the GPS C1P/C2P observable, with a maximum signal strength of 40 (receiver-dependent unit, approximately dB-Hz) at the zenith. Comparing the GPS open signals versus GIOVE-A, GPS C1C is considerably stronger than the GIOVE C1B/C1C. According to the GPS and Galileo interface control documents, GIOVE-A C1B/C1A should show up with a stronger signal strength than GPS C1C. The power levels guaranteed on the Earth’s surface are -160 dBW for GPS and -158 dBW for the future Galileo satellite signals except for the BOC(10,5) and BOC(n,m) modeled signals, for which a power level of even -155dBW is guaranteed. But looking at the SNR values shown in Figure 1, we see that the GIOVE-A C1B/C1C is worse by approximately 4 dB than the GPS C1C. But keeping in mind that GIOVE-A is an experimental satellite, an increase of the signal power for the future operational Galileo satellites should improve the signal performance above that shown in this article.
Code-Tracking Noise. For signals containing data and pilot components, as in the case of those from GIOVE-A, the code-tracking noise can easily be computed as the difference between the data and the pilot signal. The advantage of this computation scheme is that both signals are influenced by identical error sources (atmospheric errors, multipath errors, receiver errors, etc.). Based on the assumption of equal uncertainties in the two components, we divided the resulting noise values by the square root of two to specify the noise level of each part according to the laws of error propagation. TABLE 3 shows the code-tracking noise for the two analyzed GIOVE-A codes sorted by elevation angle. The median code-tracking noise is 0.62 meters for C1B/C1C and 0.35 meters for C5I/C5Q, for observations below an elevation angle of 5 degrees. For the C1B and C1C code measurements, the noise median stays below 0.2 meters for an elevation angle above 25 degrees, whereas the median for the C5I and C5Q code measurements for elevation angles above 35 degrees even comes down below 0.1 meters. The results discussed above are consistent with the code-tracking noise values published previously.
Code Multipath. We computed the relative code multipath effects as code minus phase differences assuming the amplitude of phase multipath to be insignificant compared to the amplitude of the code multipath. Ionospheric effects were taken into account by using the phase measurements on two frequencies in the usual way:
In this equation, CMPx is the estimate of the multipath error on the code, Px and Lx are the code and phase measurements of the same frequency, while Ly is the phase measurement used to correct the frequency-dependent ionospheric effect. The constant, , describes the relationship of the ionospheric behavior for the two frequencies.
In order to compare the code multipath level of GPS versus GIOVE-A, we sorted the multipath values using a grid covering the sky with widths of 5 degrees for both elevation angle and azimuth as before. FIGURE 2 shows the median standard deviation of the code multipath values, derived in each grid cell per day and station, versus the elevation angle. No significant difference between GPS C1C and GIOVE-A C1B and C1C, the open code signals on G1/E1, could be found. The code multipath behavior of the GPS precise codes are comparable with the GIOVE-A C5I, C5Q, and C7Q, whereas the C8Q shows the least code multipath effects closely followed by the GIOVE-A C1A, the public regulated service signal.
FIGURE 2. Code multipath, GPS versus GIOVE-A
Carrier-Phase-Tracking Noise Analyses. In the same manner as that carried out with the code, we computed the GIOVE-A carrier-phase-tracking noise as the difference of the two components (pilot minus data). To accommodate the effect of error propagation, the resulting errors were divided by the square root of two. The resulting phase-tracking noise values were sorted by elevation angle and can be found in TABLE 4.
In conformity with the theory that the phase-tracking noise is independent of the modulation scheme, both signals (L1B/L1C and L5I/L5Q) show the same results in units of cycles. Looking at the results in units of distance, GIOVE-A L1B/L1C shows up with a mean phase noise of 0.7 millimeters and L5I/L5Q with 0.9 millimeters. These values confirm those of previous studies.
Carrier-Phase Residuals. Phase residuals contain the phase tracking noise, multipath, as well as all unmodeled remaining errors such as antenna calibration inaccuracy and tropospheric effects. The magnitude of the residuals can be seen as an indicator for the observation and model accuracy as well as for measurement quality.
The following analyses are based on the ionosphere-free linear combination (GPS L1C/L2P, GIOVE-A L1C/L7Q), computed with NAPEOS. The analyses include data of the 13 GESS over a period of 149 days.
To compare the GPS and GIOVE-A residuals, we sorted them into a grid with a width of one degree in both satellite azimuth and elevation angle. Only data in overlapping grid locations were compared to make sure the data was affected in a similar way by multipath or other disturbances.
To properly interpret the results, we should mention that for GIOVE-A, 0.06 percent of the ambiguities (2501) were not fixed correctly whereas for GPS all ambiguities were fixed correctly. Looking at the GIOVE-A observations that were correctly fixed, we find a significantly larger number of rejected observations. The number of rejected observations is less by one third for GPS (6 percent) as for the GIOVE-A (9 percent) data.
Due to the small number of GIOVE-A observations for elevation angles above 86 degrees, the outlier-cleaned mean as well as the standard deviation at this elevation-angle range are not meaningful. For all elevation angles, GIOVE-A residuals show a lower standard deviation than GPS, indicating a superior performance of GIOVE-A signals.
Phase and Code Validation in Processing. Looking at the quality of the code and phase measurements on the different signals, it is conspicuous that GIOVE-A C1A/L1A and C8Q/L8Q rank best, whereas for the current processing of GIOVE-A data, usually the C1C and C7Q signals are used. This leads to the question of which is the best signal combination for GIOVE-A. Hence, we processed 10 days of GIOVE-A data, using different signal combinations. Presently the processing of the C8Q/L8Q signals is not yet implemented in NAPEOS. However, we were able to process the GIOVE-A C1A/L1A – C7Q/L7Q combination. The root-mean-square (RMS) of the code results were reduced by a factor of approximately 1.4 using L1A/C1A compared to L1C/C1C, whereas the RMS of the phase observations showed only a minor improvement. Furthermore, there is a higher number of rejected observations with L1A/C1A. Further analyses have to be carried out to evaluate the potential benefits of the different signal combinations.
Orbit Quality
In this section, we assess the quality of our precise orbit determination solutions. We have three sets of different orbit solutions. Set 1 is made up of the 7-day solutions based solely on SLR observations. Set 2 consists of the solutions based on the microwave observations using 1- to 5-day arcs. Set 3 consists of the solutions based on a joint analysis of the microwave and SLR observations also using 1- to 5-day arcs.
First, we assess the orbit quality by looking at the internal consistency of the solutions. For the two sets using microwave observations, the internal orbit consistency is done using an orbit fit. This will not tell us much about the absolute quality of the solutions but it will indicate the optimal arc length and whether adding the SLR observations to the microwave data improves the orbit estimates.
Secondly, we validate the orbits by determining the SLR residuals. Of course, the solutions that used SLR observations should perform better than the microwave-only solutions. However, the validation of the microwave orbits against the SLR observations will give us a good impression of the absolute accuracy of our orbits.
As a third test, we compare the best orbit (best arc length) of each of the three sets (set 1 only has one arc length) against each other. This should give us another indication of the quality of the orbits.
Internal Orbit Consistency. To determine the internal orbit consistency of the different solutions we make an orbit fit. For this orbit fit test, we used the middle 24 hours of two consecutive solutions and fit one 48-hour arc through these two parts. The satellite orbit was modeled by estimating the satellite state vector and all nine parameters of the extended CODE orbit model. The RMS of this fit gives us an indication of the internal consistency of the orbit estimates. For longer arcs, the RMS of fit should go down because the solutions are not fully independent of each other. So a lower RMS for the longer arc solutions is expected. On the other hand, this means that if the RMS does not go down with increasing arc length that we have reached the limit of our modeling capabilities. Furthermore, comparing the internal orbit consistencies of equal length solutions will tell us which solution has a better internal consistency. The results of this internal orbit consistency check are given in TABLE 5. The table gives the mean of the 2-day RMS over all processed days. The mean is given separately for the first and second part of the observation interval (see above) and also for the total observation interval.
Table 5 shows several interesting results. First of all, it shows that the results of part 2 of the observation interval are significantly better than the results from part 1. The reason for this is unclear since the statistics from the 1-day solutions, such as the residual RMS and number of observations, did not change significantly after the observation gap. The improvement, however, is very significant. The second observation is that the results including the SLR data are significantly better compared to those using only the microwave data. This is true for all arc lengths! As expected, we see a significant improvement of the internal consistency when going from 1-day arcs to 3-day arcs. The 4-day arcs show only a slight improvement compared to the 3-day arcs. The 5-day arcs do not show a significant improvement. This indicates that with the current observations and modeling techniques, the optimal arc length for precise orbit determination seems to be around 3 to 4 days.
SLR Validation. In this section, we look at the SLR residuals obtained from the different orbit solutions. We generated a clean SLR dataset by using the SLR-only orbit to remove any outliers in the SLR observations. The total number of valid SLR normal points for the entire period is 3520 observations from 17 different SLR stations. (A normal point is an average of a number of individual laser returns.) The number of observations for the first part of the observation period is 796 points from 12 stations and for the second part, there were 2724 normal points from 17 stations. For two of the three solutions, the SLR data has been used in the orbit determination process so the residuals will give a too-optimistic indication of the orbit quality.
As can be seen from TABLE 6, the 3-day solution based on the microwave-only data has the lowest SLR residuals and indicates a radial precision of around 100 millimeters. A similar behavior can be seen in the microwave plus SLR solution with the exception of the 1-day solution (and to a smaller extent also the 2-day solution) where the orbit solution is mainly driven by the SLR data, but the quality as can be seen from the internal consistency of the orbit is poor. Interestingly, there is a large improvement in SLR residuals for the microwave plus SLR solution, although the number of SLR data points is only 2 percent of the total tracking data in the combined solution. The values for the SLR-only solution are included in the table to give an indication of the lowest possible SLR residuals one could expect by combining the microwave and SLR data.
Orbit Comparison. To get an indication of the overall orbit quality, the best solutions were compared against each other for the second period of observation. TABLE 7 gives the RMS differences between the SLR only (SLR), 3-day microwave only (micro), and the 3-day microwave and SLR solution (micro+SLR) for the radial, along-track, and cross-track position components as well as the norm (3D).
As expected, the largest difference is between the SLR-only and microwave-only solutions giving a total (norm) orbit difference of 652 millimeters. As a major part of the SLR tracking from GIOVE-A comes from European stations, the quality of the SLR solutions is directly correlated with the ability of the European stations to track GIOVE-A. Bad weather over Europe can lead to data gaps for more than 24 hours, affecting the orbit quality. It is interesting to see the large impact the SLR data has on the combined solution. As mentioned before, the SLR data is only around 2 percent of the total tracking data but has a significant impact on the orbit solution as can be seen from the difference between the microwave-only and microwave-plus-SLR solution.
Based on the analysis presented above, we conclude that the 3-day solution using both microwave and SLR observations has provided the best orbit estimates.
Conclusion
The analyses of the observation data quality (signal quality) confirmed the good results from prior analyses for code multipath behavior and code noise. GPS C1C and the GIOVE-A C1B/C1C show a comparable multipath behavior, whereas the GPS precise codes C1P/C2P are comparable to the GIOVE-A C5I, C5Q, and C7Q. The least code multipath behavior could be found for GIOVE-A C8Q observable, closely followed by the GIOVE-A C1A. Based on this, the combination C1A/L1A – C8Q/L8Q should show the best noise behavior within the data processing scheme.
The results given in this article demonstrate that the 13-station GESS network allows us to determine the orbit of the GIOVE-A satellite quite accurately (~200 millimeters) using only microwave observations. The SLR validation of the microwave orbits gives an RMS of 100 millimeters (one-way range RMS). This result gives an absolute value for the orbital error. Of course, the SLR observations mainly tell us something about the radial orbit errors; the along- and cross-track errors could be much higher. To obtain accurate GIOVE-A orbit estimates, we need to keep the orbits and clocks of the GPS satellites, tracked simultaneously with the GIOVE-A satellite, fixed using the International GNSS Service (IGS) final orbit and clock products. Furthermore, an arc length of 3 days should be used. The microwave-based orbit estimates may be improved by adding the available SLR observations into the orbit-estimation process. Although there are relatively few SLR observations, they do have a significant positive effect on the orbit estimates, improving the internal consistency from 52 to 41 millimeters. Also, the validation of the orbits using the SLR observations shows a significant improvement. However, this is not an independent validation because the same SLR observations were used in the orbit determination.
The results presented in this article, even though based on observations from the GIOVE-A test satellite, can be considered as a first attempt towards establishing an optimal data processing approach for the future Galileo satellite constellation.
Acknowledgments
This article is based on the paper “GIOVE-A Precise Orbit Determination from Microwave and Satellite Laser Ranging Data – First Perspectives for the Galileo Constellation and Its Scientific Use” presented at the 1st Colloquium on the Scientific and Fundamental Aspects of the Galileo Program, held in Toulouse, France, October 1-7, 2007.
ERIK SCHÖNEMANN studied geodesy at the Technische Universität Darmstadt (TUD), Germany, writing his diploma thesis at the University of New South Wales, Sydney, Australia. Since receiving his diploma from TUD in April 2005, he has been working for the Institute of Physical Geodesy at TUD on GNSS station calibration and validation and analyses of GIOVE-A and GIOVE-B data.
TIM SPRINGER received his Ph.D. in physics from the Astronomical Institute of the University of Berne (AIUB) in 1999. He has been a key person in the development of the Center for Orbit Determination in Europe, one of the IGS analysis centers, located at AIUB. Since 2004, he has been working for the Navigation Support Office (NSO) at the European Space Operations Centre (ESOC) of the European Space Agency (ESA) in Darmstadt. In this group, he has led the development of the new ESOC GNSS software, which is used for most GNSS activities at NSO including GIOVE-A and -B analyses.
MICHIEL OTTEN obtained a degree in aerospace engineering from Delft University of Technology in 2001. He has been working for ESOC’s NSO since 2002. His main role within NSO is the precise orbit determination of low Earth-orbiting satellites equipped for SLR, DORIS, and GPS tracking. He is also responsible for ESA’s International DORIS Service Analysis Centre activities.
MATTHIAS BECKER is a full professor of geodesy and director of the Institute of Physical Geodesy, TUD. He received his diploma and Ph.D. in geodesy from TUD in 1979 and 1984, respectively. He is responsible for research and teaching in the fields of physical geodesy and satellite geodesy.
FURTHER READING
• GIOVE-A
“Meet GIOVE-A: Galileo’s First Test Satellite” by E. Rooney, M. Unwin, A. Bradford, P. Davies, G. Gatti, V. Alpe, G. Mandorlo, and M. Malik in GPS World, Vol. 18, No. 5, May 2007, pp. 36–42.
“Galileo Signal Experimentation” by M. Hollreiser, M. Crisci, J.-M. Sleewaegen, J. Giraud, A. Simsky, D. Mertens, T. Burger, and M. Falcone in GPS World, Vol. 18, No. 5, May 2007, pp. 44-50.
• GIOVE Tracking Network
“GIOVE Mission Sensor Station Receiver Performance Characterization: Preliminary Results” by M. Crisci, M. Hollreiser, M. Falcone, M. Spelat, J. Giraud, and S. La Barbera in Proceedings of Navitec 2006, the 3rd ESA Workshop on Satellite Navigation User Equipment Technologies, Noordwijk, The Netherlands, December 11-13, 2006.
• GIOVE Tracking Performance
“Performance Assessment of Galileo Ranging Signals Transmitted by GSTB-V2 Satellites” by A. Simsky, J.-M. Sleewaegen, M. Hollreiser, and M. Crisci in Proceedings of ION GNSS 2006, the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation, Fort Worth, Texas, September 26-29, 2006, pp. 1547–1559.
“Code and Carrier Phase Tracking Performance of a Future Galileo RTK Receiver” by T. Pany, M. Irsigler, B. Eissfeller, and J. Winkel in Proceedings of ENC-GNSS 2002, the European Navigation Conference, Copenhagen, Denmark, May 27-30, 2002.
• Multipath Mitigation in Modernized GNSS
“Comparison of Multipath Mitigation Techniques with Consideration of Future Signal Structures” by M. Irsigler and B. Eissfeller in Proceedings of ION GPS/GNSS 2003, the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation, Portland, Oregon, September 9-12, 2003, pp. 2584–2592.
• GIOVE Orbit Determination
“Estimation and Prediction of the GIOVE Clocks” by I. Hidalgo, R. Píriz, A. Mozo, G. Tobias, P. Tavella, I. Sesia, G. Cerretto, P. Waller, F. González, and J. Hahn in Proceedings of the 40th Annual Precise Time and Time Interval (PTTI) Meeting, Reston, Virginia, December 1-4, 2008.
• Satellite Laser Ranging
“GIOVE’s Track: Satellite Laser-Ranging Campaigns” by M. Falcone, D. Navarro-Reyes, J. Hahn, M. Otten, R. Piriz, and M. Pearlman in GPS World, Vol. 17, No. 11, November 2006, pp. 34–37.
“The International Laser Ranging Service: Current Status and Future Developments” by W. Gurtner, R. Noomen, and M.R. Pearlman in Advances in Space Research, Vol. 36, No. 3, 2005, pp. 327–332 (doi:10.1016/j.asr.2004.12.012).
“Laser Ranging to GPS Satellites with Centimeter Accuracy” by J.J. Degnan and E.C. Pavlis in GPS World, Vol. 5, No. 9, September 1994, pp. 62–7.
GMV, a supplier of satellite ground system software headquartered in Madrid,
Spain, with a significant role in Europe’s Galileo program, has announced
the appointment of Jesus Serrano as its new Chief Executive Officer (CEO).
Serrano, 48, replaces Luis Mayo in his position as the business group’s top
executive, reporting directly to the board.
With more than 20 years of experience through various management positions
at GMV, this Spanish native will continue to lead the multinational technology
group and expand their products and services to its customers throughout the
U.S., South America, Africa, Asia and Oceania.
Presented here is a lightly abridged version of the plenary address by the European Commission’s Head of Unit for Galileo, Paul Verhoef, at the ION GNSS conference in Savannah, Georgia, September 16.
After a brief Galileo snapshot of current status, I will proceed as requested with predictions of life in a multiple-GNSS world. We have secured an additional budget of €3.4 billion mainly for developing and launching the Galileo constellation, with the key objective of a full operational capability in 2013.
Here let me talk about our second test satellite, GIOVE-B, launched on April 27. This bird is healthy and flying according to its specifications, although I hear there was a small problem that caused the satellite to go into safe mode. The engineers are currently testing the signals and using the flight and mission data to fine-tune the last parameters for the manufacturing of the 30 satellites of the constellation.
In July the European Space Agency (ESA) launched the procurement for the Full Operational Capability (FOC). As of last week, we have a shortlist of eligible bidders for sector primes, and ESA will now start the second phase. The list will be published in the next few days. I would like to add that we have opened up this procurement internationally in accordance with the European Union’s (EU’s) World Trade Organization commitments, and with some exceptions for areas of the system that contain classified technologies. The net results will be that EU prime contractors will be able to ask for authority to use non-EU suppliers and subcontractors.
We foresee Galileo to become operational in 2013. In the mean time, the European Geostationary Navigation Overlay Service (EGNOS) will make up the first element of the European GNSS. Just to recall, EGNOS is the augmentation system improving the accuracy of GPS and warning users of possible outages. EGNOS currently covers Europe, but extensions are being considered.
EGNOS is in its final qualification stage. Its performance is excellent, within 100 percent availability recorded over about nine months now. The European Commission intends to contract a private operator to operate and maintain the system starting next spring. In parallel, certification for aviation use is under way with the target of end of 2009.Let me now turn to market issues that take us through the issue of a multi-constellation world.
In Europe the emphasis has been redirected from focusing on direct revenues for the potential operator toward the possibilities to boost business, research, and the markets for GNSS applications both in Europe and worldwide.
IP and Applications. With this new direction in mind, we are now working on two sectors: intellectual property and application issues.
Intellectual property policy is high on our work plan for later this year and next year, and an analysis advancing on impact of various options in this context. We seek a solution balancing in a fair manner three objectives:
fair treatment of industries, EU or non-EU,
reasonable return to taxpayers’ money, and
ensuring the timely and sufficient availability of Galileo user receivers and downstream services at FOC.
Against the results of a recent stakeholder consultation, we are pursuing a second closely market-related initiative, an Action Plan which spells out Europe’s objectives and plans to develop applications for GNSS.
This will not be a marketing strategy for the European GNSS, but a list of actions that the public sector should take to support the development. For example, promote interoperability of road tolling systems in the EU and facilitate receiver development.In one word, European satellite navigation programs are on track, and we are excited that we have left behind the stormy times, and we hope that we are going to sail in calmer waters in the future.
Spacescape Evolution
This brings me to the GNSS fortune-telling part, as requested.
There will be at least four global systems and at least a half a dozen regional systems in Europe, the Americas, and Asia.
How will this affect GNSS?
The end users have everything to gain. I like to believe those that say that Galileo — even at the paper stage eight years ago — was one of the catalysts for innovation in this sector. We will soon have four for the price of one in your next multi-constellation receiver.
The obvious effect is that new applications will emerge as ever-more robust PNT (positioning, navigation, and timing) data penetrates service packages ranging from logistics to law enforcement.
One cellphone maker summarized the situation for the manufacturers and end users as something between fantastic and awesome. The downstream industries are possibly the big winners, at least in the medium term, until the market reaches a saturation point and consolidation picks up pace.
What about us GNSS providers? What’s in it for us other than footing the bill?
Tougher Customer Requirements. We GNSS providers will need to think hard about things such as backward compatibility, trade-off management of conflicting requirements, manufacturer friendliness and, not least, listening to the users.
We should reduce the time-to-market for new products and ensure a comprehensive and global customer support. At some point soon we need to seriously address the issue of third-party liability.
Regulatory Work. GNSS providers believe that limited and carefully targeted regulation in satellite navigation is actually useful. Examples speak for themselves: public authorities in all four global GNSS nations have taken or plan to take regulatory measures affecting the use of GNSS. Examples: E-911 in the United States, E-112 and livestock transport in Europe, government use in China, and so on.
Competition. Let’s face it: however governmentally, non-commercially, or multilaterally we run our systems, I do believe in the human desire for fame and reward. Each of us will want to be at least that little bit ahead of our neighbor, whatever parameters are used. In that situation the customer will be the king and can shop around — at least if competition is not distorted with system-specific mandates, cartels, or the like.
Trade Policy. From international competition there is usually a short way to trade policy and disputes. While trade discussions are useful, I hope we can stay clear of disputes as much as possible, as they divert resources from “the main thing.” So far that has worked quite well, yet we may need to put more efforts into verifying whether the current trade regime is sufficient and the playing field is actually level.
Spectrum. Linked to all these developments are the various aspects of radio spectrum, some mentioned earlier today already.
There is the increasing compatibility challenge caused by scarce spectrum, shortcomings of the International Telecommunications Union (ITU) mechanism for GNSS, and the desirability of common center frequencies, wider bandwidth, and so on. In short, a lot of work ahead of us.
Cooperation. As you heard in my words, international cooperation will need to underpin this environment in order to ensure proper functioning of the systems.
Evolution of Policies
While the European Commission may be Programme Manager, it is the transport departments of the EU and its 27 member states that actually are behind Galileo. They have done this for specific purposes: they want to use it.
Our research, space, foreign policy, and, believe it or not, finance colleagues tend to push this cart with us — usually in the same direction. As Galileo gets closer to the operational capability, the interest of the other departments, institutions, and stakeholders in Galileo and GNSS in general is likely to increase.
It is here in the United States where you have accumulated the longest experiences in this field. As we have heard, transport and other non-military policies have started to weigh more in the management of GPS over the years.
GLONASS is also diversifying with a higher civilian content. Our colleagues in Asia are moving forward with civil applications of higher density.
I foresee two trends:
First, whatever the policy mix behind the various systems, we can observe today an element of GNSS patriotism, alive and kicking. We all want our own systems and for quite legitimate reasons. That trend is likely to continue for some time still in the form of states or groups of states deciding to build their own regional or even global systems or integrity networks. In this business, added security or sovereignty qualifies as return on investment just as well as service quality, new jobs, or straight cash.
This is not the only trend in town. And yes, there is a counter-current hatching in the United Nations International GNSS Committee (IGC). Already the conception years of this new forum have created somewhat the “we are in the same boat” atmosphere among GNSS providers.
The point is that the IGC is becoming the place for all the providers and users to discuss GNSS coordination issues across several sectors (the ITU, International Maritimie Organization [IMO], and International Civil Aviation Organization [ICAO] are sector- or issue-specific). We have already seen signs of reaching the limits of bilateral coordination, for example, regarding compatibility and interoperability in a multi-constellation world. Deliverables from the IGC so far are encouraging, and the forum helps in communication and transparency between the participants.
I would expect to see cooperation emerging among the providers in constellation and ground-segment management from a pure cost point of view. It is like owning a sports car; as the mileage accrues over the years, the talk shifts from tuning options to maintenance bills.
Conclusions
The evolution of GNSS is bound to foster new applications; the quantum leap in available satellites and services will give end users and manufacturers sizeable benefits. The GNSS providers will need to adapt to this new reality and volatility and have a vision of what it is we actually want to achieve. Considerable investments in security will be needed at different levels of the systems.
That said, where policies are concerned, we will probably be witnessing two conflicting trends: GNSS patriotism and multilateral action through the IGC.
In the GNSS provider states, the mix and evolution of the national policies guiding GNSS development varies considerably. The tendency is towards enlarging, however, the group of stakeholders (government or other) involved in policy-making towards more and more user sectors.
In any case, in Europe we finally believe that satellite navigation is facing a fabulous future: technology trends such as personal computing, mobile communications, and the Internet come to mind.
We need to turn this challenge into an opportunity. There are many global issues to which satellite navigation can bring a small but important contribution such as climate change, reduction of CO2, reduction of fuel consumption, search and rescue, and much more. Ladies and gentlemen, I would like to thank again our hosts for giving me the opportunity to present our intentions with this conference, and I thank you for your attention.




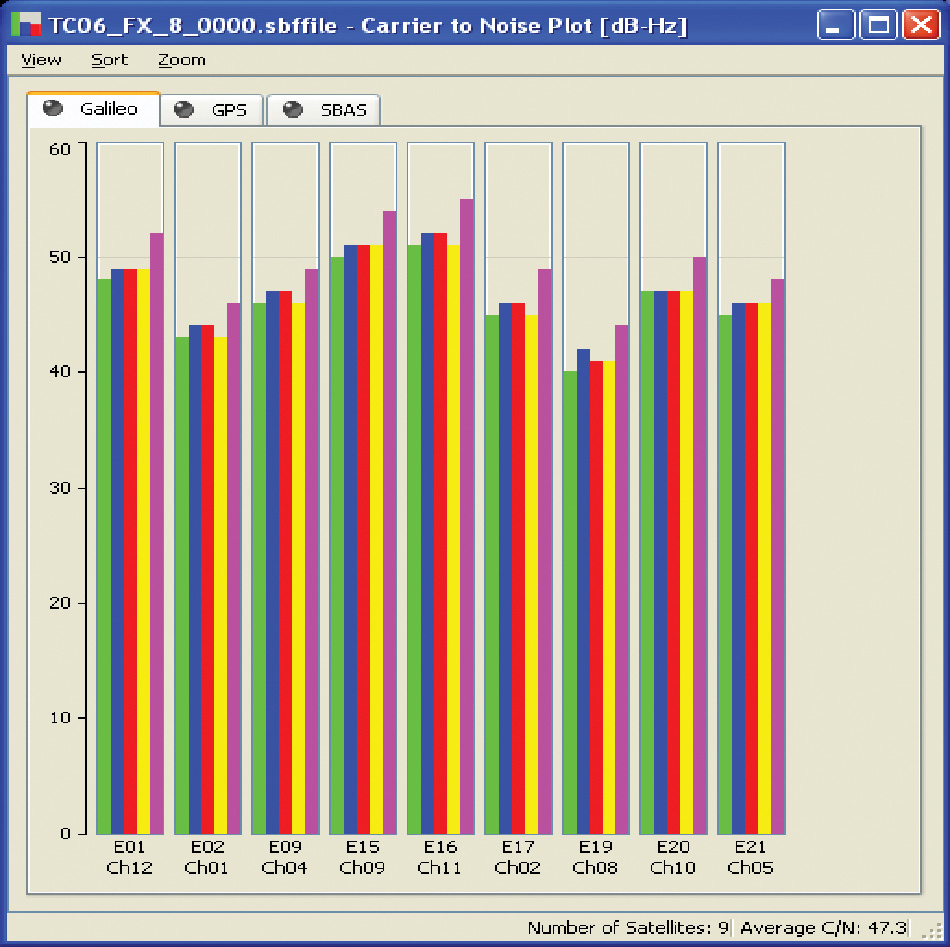
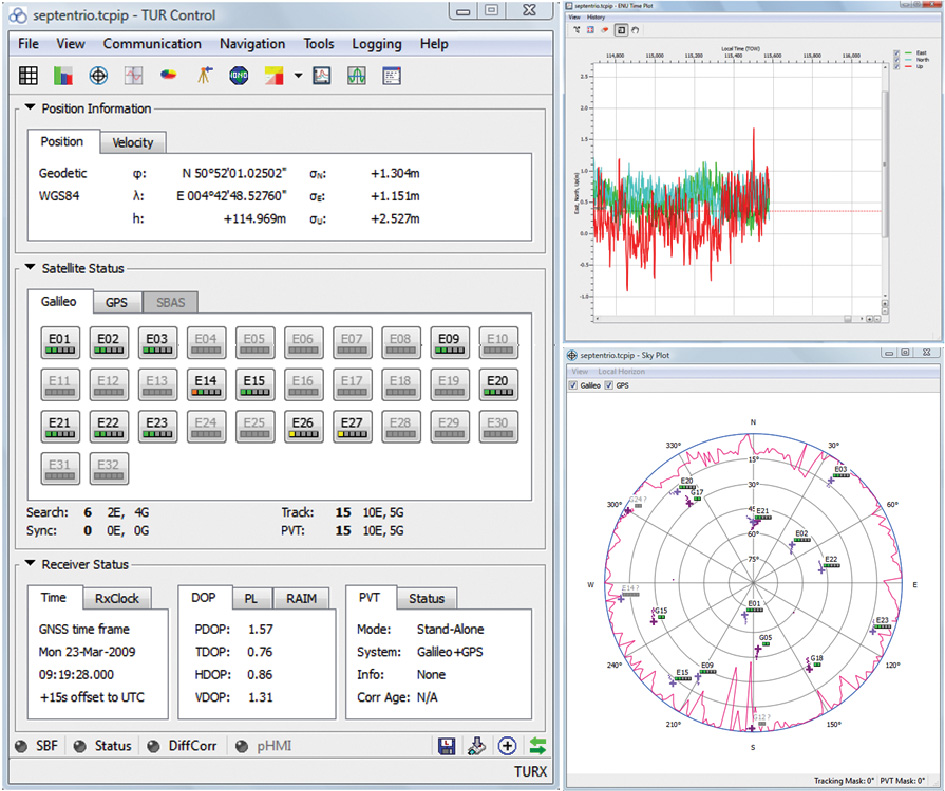
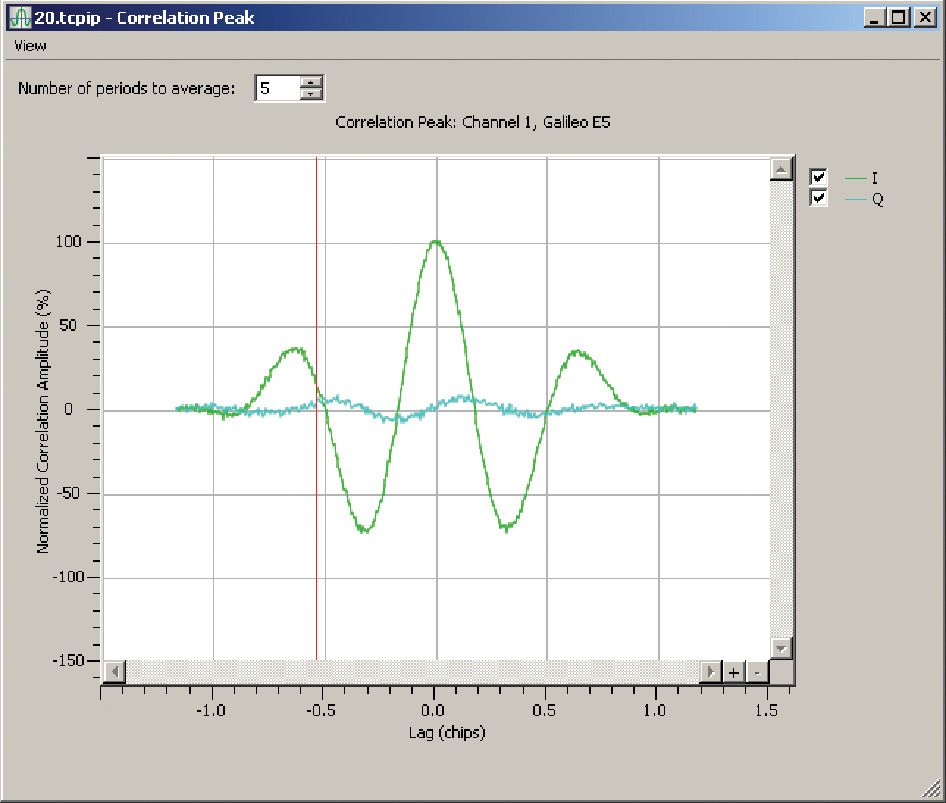
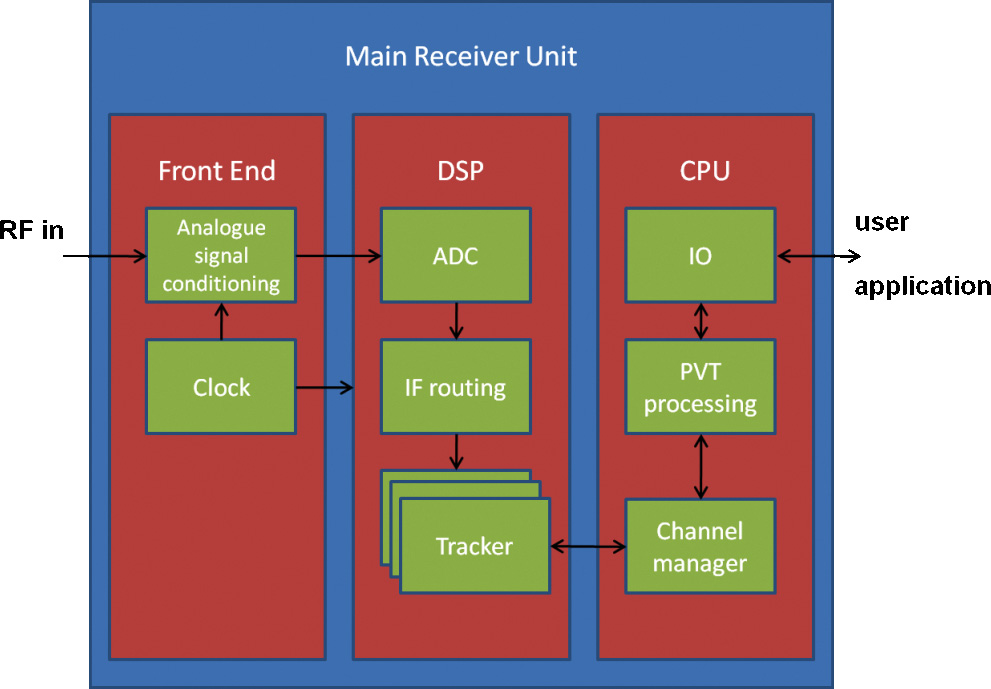
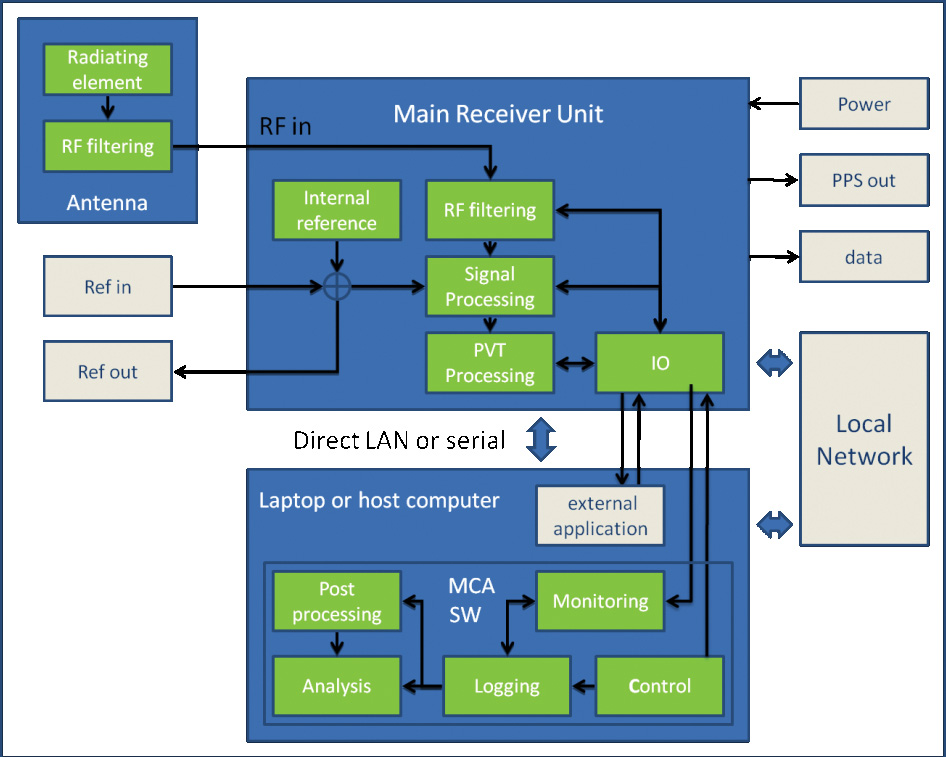
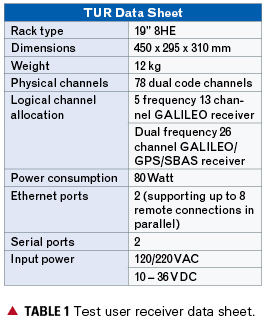
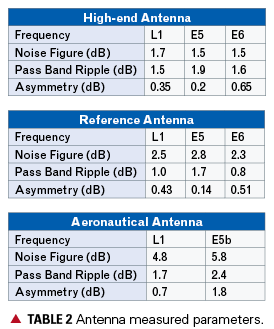
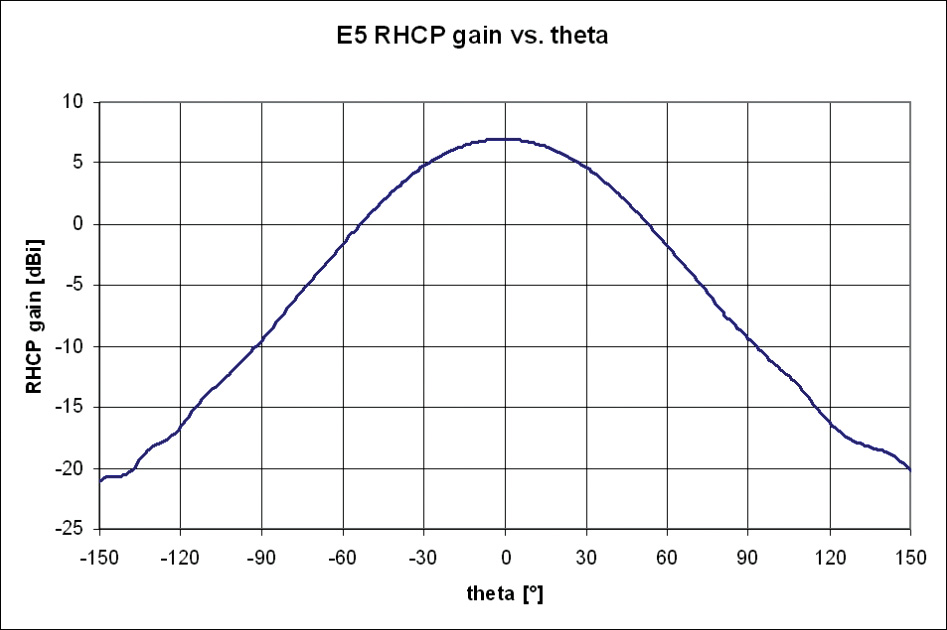
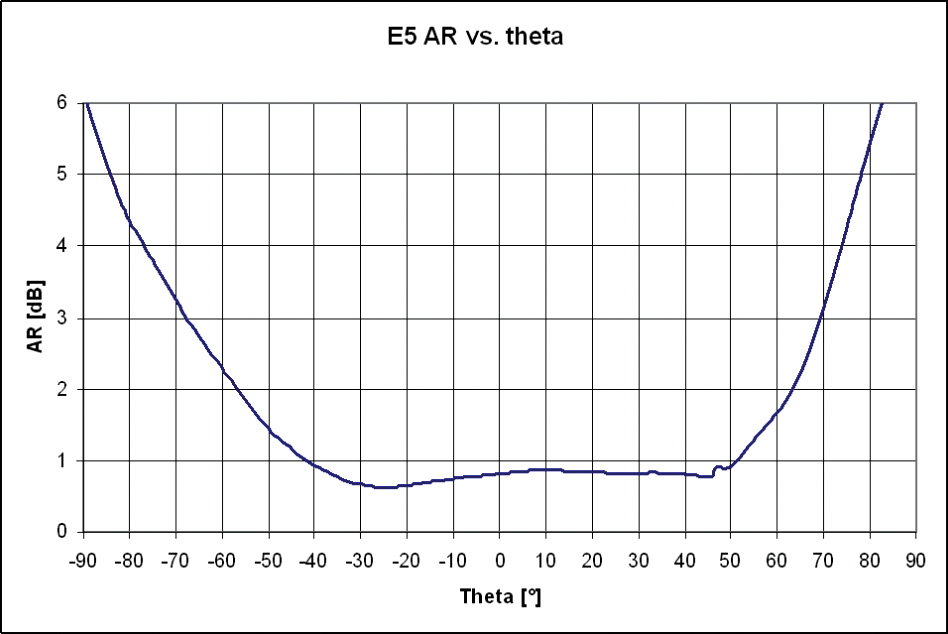
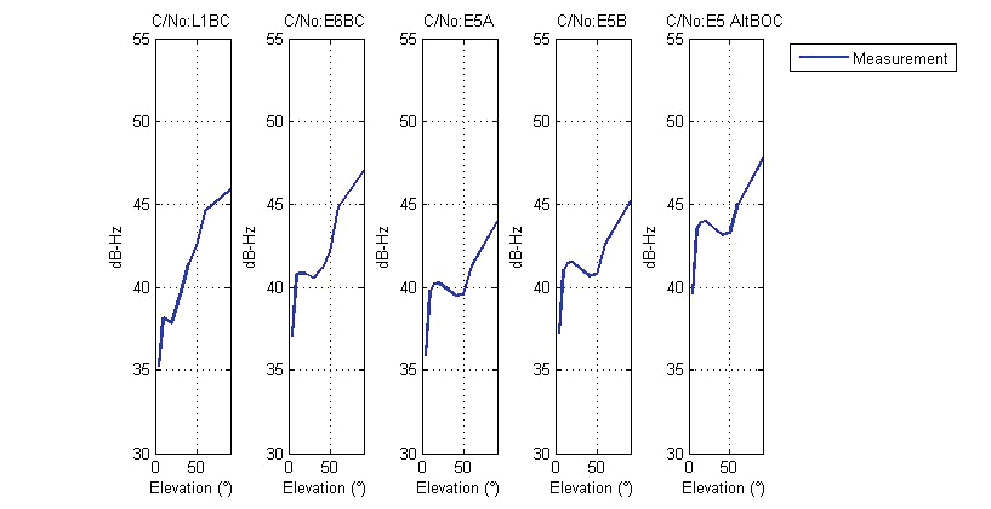
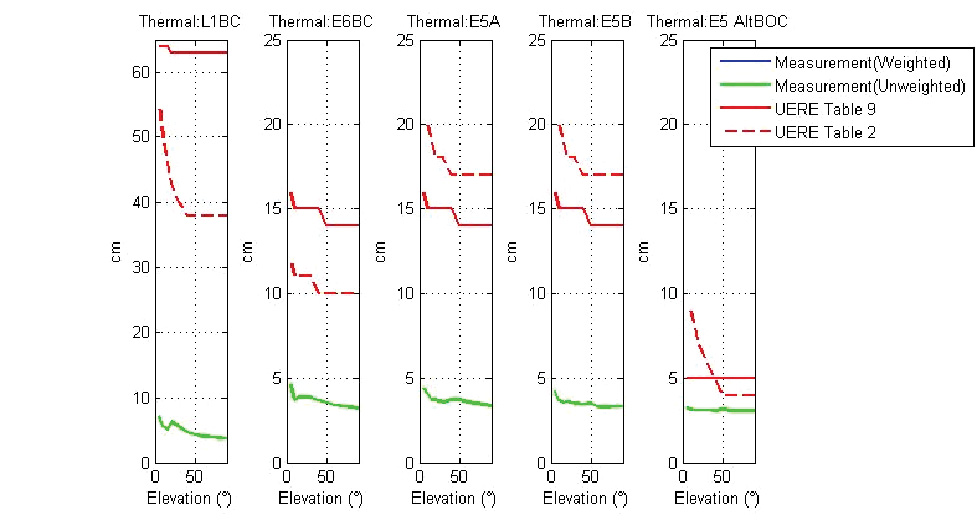
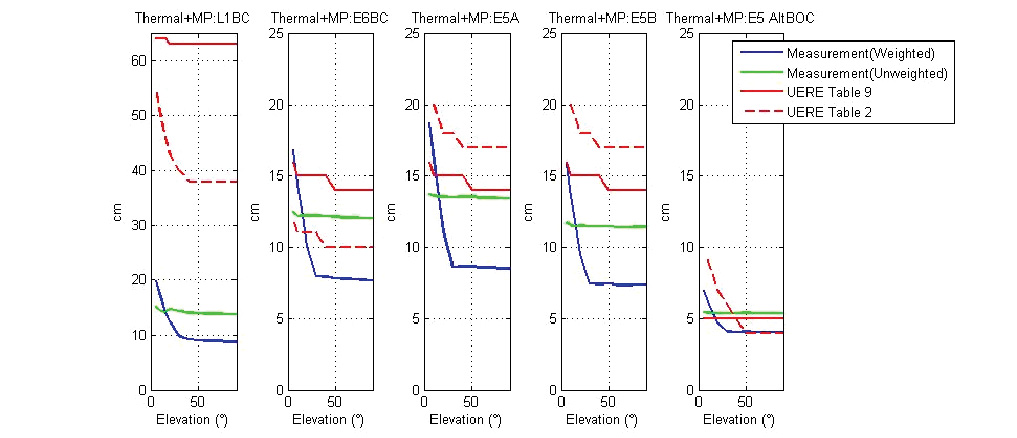
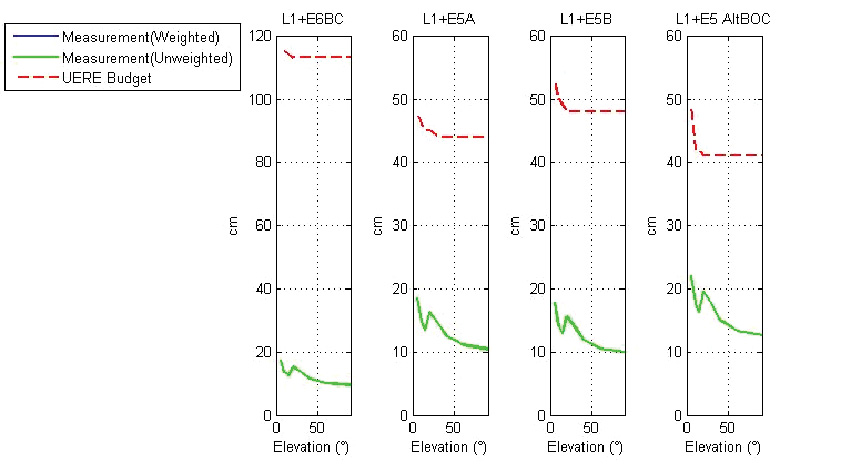
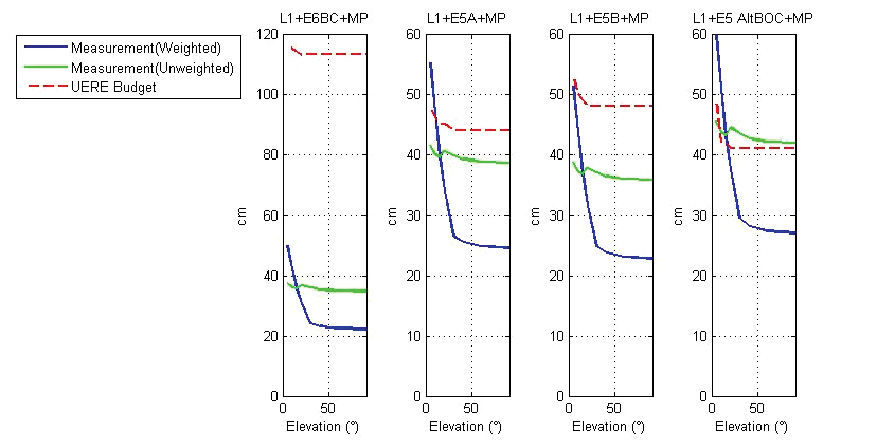
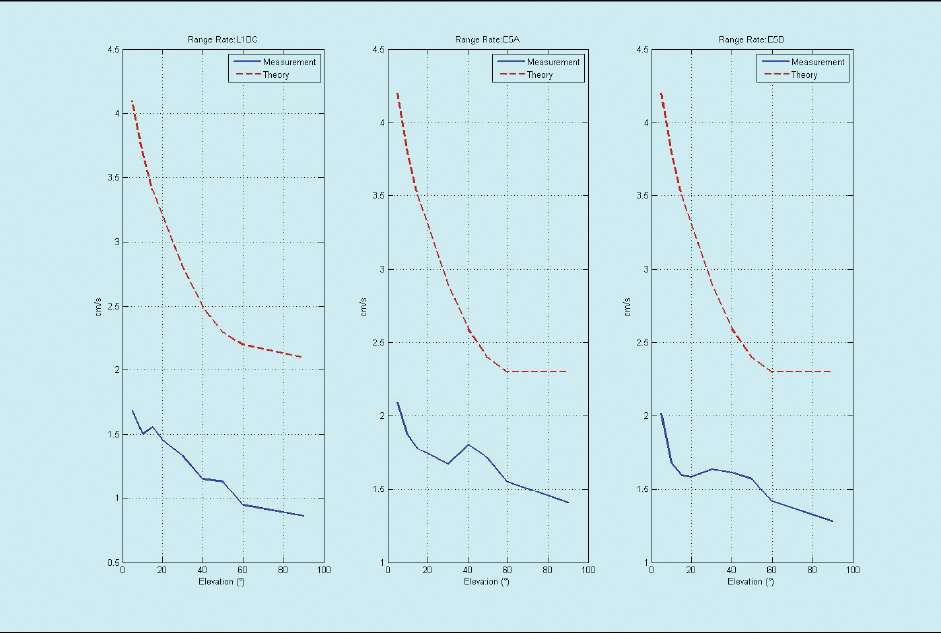
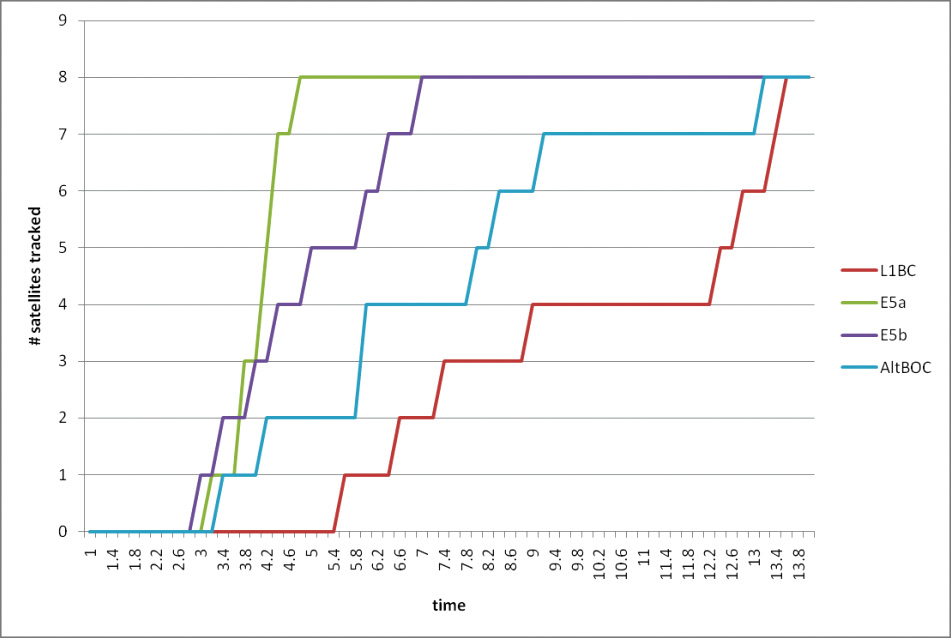
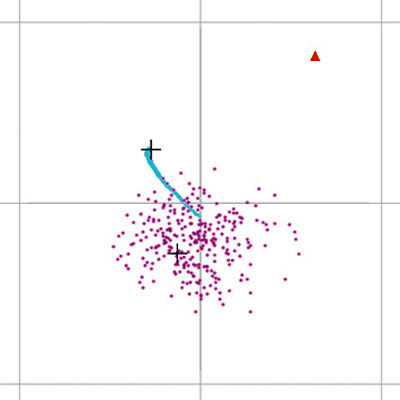
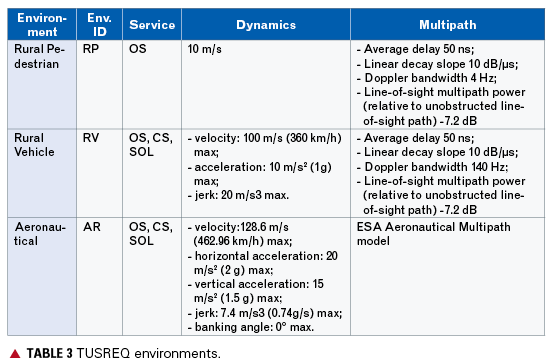
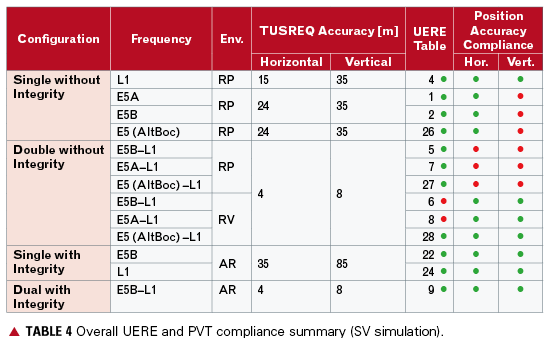
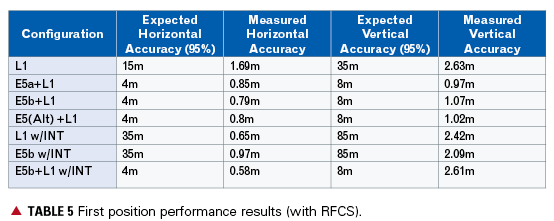
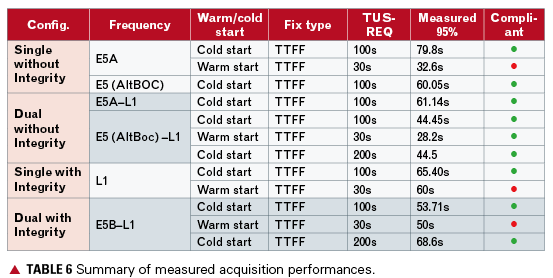
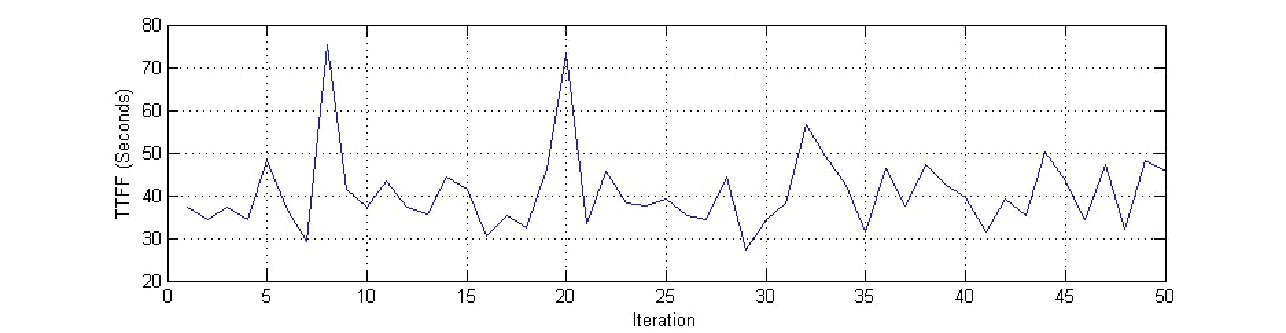
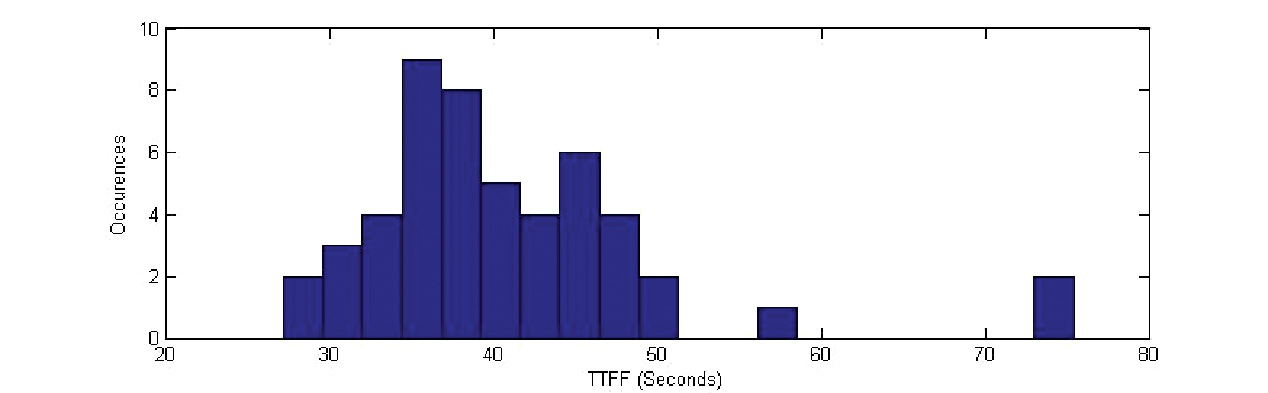

 Three GLONASS-M satellites launched on March 1 are expected to enter service on March 22 and March 30, according to deputy general director Grigoriy Stupak’s statement in Munich. This would bring the constellation, according to his calculations, to 23 operational satellites, though two of those are held in reserve.
Three GLONASS-M satellites launched on March 1 are expected to enter service on March 22 and March 30, according to deputy general director Grigoriy Stupak’s statement in Munich. This would bring the constellation, according to his calculations, to 23 operational satellites, though two of those are held in reserve.
 However, a payload glitch found aboard one recent satellite after its launch into space forced a return to the factory of three satellites scheduled for launch in September. The three put into orbit this week will now only bolster continuing GLONASS coverage of Russian sovereign territory, which requires 18 operating spacecraft.
However, a payload glitch found aboard one recent satellite after its launch into space forced a return to the factory of three satellites scheduled for launch in September. The three put into orbit this week will now only bolster continuing GLONASS coverage of Russian sovereign territory, which requires 18 operating spacecraft.

 Four Galileo in-orbit validation (IOV) satellites scheduled to launch next year have already missed their first pad date.The European version of Russia’s Soyuz rocket is now scheduled to carry the four IOV satellites into orbit in two launches in November 2010 and early 2011, as announced by European Space Agency (ESA) Director-General Jean-Jacques Dordain on October 9.
Four Galileo in-orbit validation (IOV) satellites scheduled to launch next year have already missed their first pad date.The European version of Russia’s Soyuz rocket is now scheduled to carry the four IOV satellites into orbit in two launches in November 2010 and early 2011, as announced by European Space Agency (ESA) Director-General Jean-Jacques Dordain on October 9.