Veripos, a global provider of precise satellite positioning solutions to the international offshore and marine industries, is concluding the upgrade of its global network of GNSS reference stations with high-performance multi‑frequency GPS/GLONASS/Galileo/BeiDou receivers from Septentrio.
Veripos owns and operates a network of more than 80 reference stations worldwide that is used to determine estimates of the orbit and clock errors of multiple GNSS satellite constellations. Veripos uses these estimates to calculate corrections which are then broadcast to end users to significantly improve the accuracy of positioning. At the heart of the network is Septentrio PolaRx4, a full-featured reference receiver that provides high-quality tracking and measurement of all available and upcoming GNSS signals.
The upgrade of the Veripos global network of reference stations with the latest Septentrio reference receiver technology is an outcome of the multi-year collaboration between the two companies. Septentrio also supplies Veripos with multi-frequency GNSS and heading receivers for its marine business, including the LD series of integrated mobile units that deliver the complete range of Veripos augmentation services to its customers worldwide.
“Septentrio reference stations are renowned for their excellent data-quality and robustness,” commented Bobby Johnson, Chief Technical Officer of Veripos. “Septentrio technology enables us to provide a full range of services and to remotely manage and upgrade the hardware to enhanced features, which is crucial for managing a worldwide reference network, where the equipment is often not easily accessible.”
“We are delighted to see continued positive outcome from the technical and commercial relationship we have established with Veripos over the years and that has developed into Septentrio enabling Veripos to deliver a variety of solutions with high-quality and robust industrial performance everywhere on the globe to the benefit of a multitude of users in one of the most demanding industries,” said Jan Van Hees, head of sales and business development at Septentrio.
Hemisphere GNSS has announced that all professional-level Vector products — including the V103, V113, VS131, and VS330 — now include the ability to utilize the GLONASS system along with GPS in the navigation solution. The tracking of the additional GLONASS signals provides a more robust solution, especially in challenging environments, the company said.
Vector Technology processes L1 GPS and GLONASS signals to deliver precise heading, greater positioning reliability, and improved performance in challenging environments. Hemisphere GNSS’ patented Vector technology computes the heading and pitch or roll angle while stationary or in motion allowing for heading accuracy of up to 0.01 degrees depending upon the product selected. A variety of differential correction methods also make it possible for Vector products to provide sub-meter to centimeter level RTK position accuracy.
Professional marine industry organizations can maximize performance by integrating Hemisphere GNSS Professional Vector technology into their systems for hydrographic and bathymetric surveys, autopilots, dredging, and buoys. For land applications, Vector Technology is designed for the alignment of cameras, antennas, and projectiles, and for machine control applications in agriculture, construction, and mining.
Nucleus of Four Now Operational: It “Works, and Works Well”
Dual-frequency Galileo positioning performance during the In-Orbit Validation phase: positioning accuracy is an average 8 m horizontal and 9 m vertical (95% of the time). Its average timing accuracy is 10 nanoseconds on average. Plot courtesy of ESA.
“IOV was required to demonstrate that the future performance that we want to meet when the system is deployed is effectively reachable,” said Sylvain Loddo, ESA’s Galileo Ground Segment manager. “It was an intermediate step with a reduced part of the system to effectively give evidence that we are on track.”
Following a March 2013 first determination of a ground location, jointly by Galileo’s space and ground segments, program managers undertook a wide variety of tests all across Europe.
“More than 10,000 kilometers were driven by test vehicles in the process of picking up signals, along with pedestrian and fixed receiver testing. Many terabytes of IOV data were gathered in all,” said Marco Falcone, ESA’s Galileo System manager.
According to ESA’s elaboration on the test results, the system has proved itself capable of solely performing positioning fixes across the planet.
Galileo’s observed dual-frequency positioning accuracy is an average of 8 meters horizontal and 9 meters vertical, 95 percent of the time. Its average timing accuracy is 10 billionths of a second. Its performance is expected to improve as more satellites are launched and ground stations come on line.
For Galileo’s search-and-rescue function — operating as part of the existing international Cospas–Sarsat programme — 77 percent of simulated distress locations can be pinpointed within 2 kilometers, and 95 percent within 5 kilometers. All alerts are detected and forwarded to the Mission Control Centre within a minute and a half, compared to a design requirement of 10 minutes.
“Europe has proven with IOV that in terms of performance we are at a par with the best international systems of navigation in the world,” said Didier Faivre, ESA director of Galileo and Navigation-related Activities.
Historically Speaking. In a February 2013 GPS World article, Peter Steigenberger, Urs Hugentobler, and Oliver Montenbruck discussed Galileo-only positioning. “Using an ionosphere-free dual-frequency linear combination of pseudorange measurements on the Galileo E1 and E5a frequencies, the position of the TUME reference station [at the Technische Universität München (TUM) in Munich, Germany] could be determined with a 3D position error of less than 1.5 meters,’” the authors said.
Crystal Ball Gazing. The next two Galileo satellites, of the full operational capability (FOC) class, currently complete their testing for flight clearance at ESA’s ESTEC facility.
Six such satellites are destined to rise into space in 2014, according to ESA’s master plan. Should all those launches occur as scheduled, Galileo’s initial services could start by the end of the year.
GNSS Vulnerable: What to Do?
Too Much Sensitivity, Not Enough Robustness, Says Parkinson
Brad Parkinson, the founding architect of GPS, told a UK conference that the system needs to be made more robust to ensure worldwide availability of services to users. His concerns over GPS availability relate to threats such as the loss of authorized frequency spectrum (implicitly creating licensed jammers), space weather due to hyperactive ionospheric conditions, and deliberate or inadvertent jamming of GPS signals.
He warned that GPS is more vulnerable to sabotage or disruption than ever before, and charged that politicians and security chiefs are ignoring the risk. Western governments are “in their infancy in recognizing the problem,” he remarked further in an interview with London’s Financial Times. “[In the United States] I don’t know anyone that is really in charge of it. The Department of Homeland Security should be [but] … they don’t have any people that understand it very well. They’ve got one person without any budget to speak of.”
He also warned that Europe’s €5 billion Galileo system is equally at risk.
Parkinson proposed a three-stage program to:
Protect (legally) the signal and physically eliminate jamming sources;
Toughen the GPS/Galileo receiver’s resistance to interference;
Augment the GPS signals with other satellites or with ground-based transmitters such as eLoran.
To support his proposal, Parkinson stated, “The number one need for all GPS or Galileo users is availability. Over the years, manufacturers of signal receiver technologies have focused too much on sensitivity and not enough on resilience or robustness. The maritime industry is a particular concern where users have taken GPS for granted. They must increase preparedness and backups as they do in aviation or other GNSS-using industries.
“Even today, most ships have only GPS and the vision of their crew to guide them when approaching harbors. As you can see from today’s conference, there are a wealth of solutions to toughen and back up GPS, many of which are not technologically difficult nor expensive, but still their adoption in sectors such as global shipping is certainly not adequate.”
As part of his protection program, Parkinson urged that penalties for jamming GPS networks be coordinated worldwide. “In Australia, if you cause interference likely to cause prejudice to the safe conduct of a vessel, it’s five years in the jug [jail] and $850,000.” Contrasting this with a U.S. case that may simply impose a forfeiture of the culprit’s jamming device, Parkinson added, “I’m calling for the community of nations to move to the Aussie-type penalties.”
In the toughening regard, Parkinson alluded to integration of GPS data with information derived from an inertial positioning system. “If you combine all of these things, a good set should be able to fly within 1 kilometer of a jammer with a 10-kilometer range,” said Parkinson. “That’s what I call toughening.”
Parkinson made his remarks as the keynote speech at GNSS Vulnerabilities and Resilient PNT 2014, hosted by the Royal Institute of Navigation. He will also deliver the keynote address, “Assured PNT: Assured World Economic Benefits,” for the European Navigation Conference on April 15 in The Netherlands.
Russia will deploy as many as seven ground monitoring and augmentation stations for GLONASS outside its national boundaries. GLONASS/GNSS Forum Association Executive Director Vladimir Klimov stated that “It is planned to deploy about six or seven stations on foreign territories this year.” Negotiations for the stations are now taking place with foreign nations.
Currently, there are 46 GLONASS ground stations on Russian territory, eight in neighboring countries, three in Antarctica, and one in Brazil. The United States recently spurned, with some Congressional trumpeting, a Russian tender to site one of the ground stations on U.S. soil.
New Instrument in Space. In mid-February, the most recent GLONASS-M satellite traveled to the Plesetsk cosmodrome for a probable mid-March launch. GLONASS-M 54 will carry a high-accuracy thermal stabilization unit, installed on the spacecraft for testing and flight qualification. The next-generation K-class of GLONASS spacecraft will loft this device to provide increased positioning accuracy.
Five GLONASS-M craft are planned for launch in 2014, in one triple and two single launches.
On the night of February 12-13, the GLONASS-M #54 spacecraft left ISS-Reshetnev’s facilities in Zheleznogorsk, Russia, and was transported by air to the Plesetsk cosmodrome.
A Soyuz 2.1b / Fregat rocket with the navigation satellite GLONASS-M #54 on board is scheduled for launch in mid-March. The exact launch date is due to be set at a meeting of the state commission.
As soon as the satellite arrived to the spaceport, the joint team of ISS-Reshetnev specialists and the cosmodrome’s staff members started the launch preparation campaign.
Five satellites of the GLONASS-M series are planned for launch in 2014 to maintain GLONASS in its full operational capability. Three satellites will be launched in a single batch, while the other two will fly into orbit in two single launches.
GLONASS-M #54 will also carry an additional instrument – a high-accuracy thermal stabilization unit that was installed on the spacecraft to undergo testing and flight qualification. Next-generation spacecraft intended for the GLONASS system are going to be equipped with this instrument to provide increased positioning accuracy.
Three more GLONASS-M spacecraft have already been built by ISS-Reshetnev and are being stored at the company’s premises waiting for launch.
Russia will deploy up to seven ground monitoring and augmentation stations for GLONASS outside of Russia, reports The Voice of Russia radio. GLONASS/GNSS Forum Association Executive Director Vladimir Klimov explained the plans at a conference.
“It is planned to deploy about six or seven stations on foreign territories this year,” Klimov said. Negotiations for the stations are now taking place with foreign nations, he said.
About 50 GLONASS ground stations are planned for construction. The stations will significantly improve GLONASS performance and provide efficient applications for high-precision navigation services and smooth monitoring of systems of coordinates and Earth rotation parameters, he said.
Currently, there are 46 GLONASS ground stations on Russian territory, eight in neighboring countries, three in Antarctica, and one in Brazil.
The Russian GLONASS/GNSS Forum is conducting a survey on the future of GLONASS.
When translated, the page provides the following background:
“One of the priorities of the GLONASS system is determined to ensure its competitiveness in the global market for satellite navigation services.”Currently, public customers of the federal target program “Maintenance , development and use of GLONASS for 2012-2020 ” prepared proposals on bringing the main characteristics of the system to a level that ensures its competitiveness in the medium term ( 2020 onwards ).
“It seems appropriate that in the preparation of these proposals, the opinion of the main consumers of navigation service providers and manufacturers are taken into account.”
The survey asks the following questions (translation provided by Innovation editor Richard Langley):
What characteristics of the GLONASS system in your view are the most critical for competitiveness relative to GPS, Galileo, and Compass considering plans for their deployment and development (accuracy of the “Space Segment,” access, stability characteristics, compliance with international standards on the time scale UTC and coordinate system, others …)?
Is it important for the competitiveness of the presence of GLONASS that there be additional services such as transferring information on one of the new navigation signals to provide a highly accurate global positioning mode PPP (Precise Point Positioning) by analogy with the E6 Galileo and B6 Compass signals? What extra services could you offer for implementing in the system GLONASS for civilian users to increase its attractiveness?
Is it critical for civil GLONASS to have a complete set of new code signals (L1, L2, L3)?
Is it important in terms of competitiveness, for the GLONASS satellites, in addition to the planned new code signals in the traditional GLONASS bands (L1, L2, L3) to add another signal in the range L5? Why? If yes, for which consumers is this important?
What are the characteristics, in your opinion, that should be achieved to ensure the competitiveness of the system in 2014-2015, 2020, after 2020?
What do you see as the most effective ways to achieve the desired values of the main characteristics of the GLONASS system, including measures of state support?
Is it critical to the competitiveness of GLONASS availability to have a document of the type “Standard GLONASS civil service,” which would give the key performance characteristics of GLONASS and these characteristics would be guaranteed by the “provider” of the GLONASS system (similar to the standards issued by GPS and Compass)?
Responses are being accepted until February 14. Send responses to [email protected] with Questionnaire TTX in the subject line. Responses will be compiled and prepared for appropriate treatment to public customers of the federal target program “Maintenance, development and use of GLONASS for 2012-2020 years. “
The implementation changes and first live tests of BeiDou and Galileo on Teseo-3 GNSS chips developed in 2013 are covered, bringing it to a four-constellation machine. By 2020, we expect to have four global constellations all on the same band, giving us more than 100 satellites — under clear sky, as many as 30 or 40 simultaneously.
By Philip G. Mattos and Fabio Pisoni
Multi-constellation GNSS first became widely available in 2010/2011, but only as two constellations, GPS+GLONASS. Although receivers at that time may have supported Galileo, there were no usable satellites. BeiDou was a name only, as without a spec (an interface control document, or ICD), no receivers could be built. However, the hardware development time of receivers had been effectively shortened: the Galileo ICD had been available for years, BeiDou codes had been reverse-engineered by Grace Gao and colleagues at Stanford, and at the end of 2011 they were confirmed by the so-called test ICD, which allowed signal testing without yet releasing message characteristics or content.
The last weeks of 2012 saw two great leaps forward for GNSS. Galileo IOV3 and 4 started transmitting at the beginning of December, bringing the constellation to four and making positioning possible for about two hours a day. At the end of December, the Chinese issued the BeiDou ICD, allowing the final steps of message decode and ephemeris calculation to be added to systems that had been tracking BeiDou for many months, and thus supporting positioning. The Teseo-2 receiver from STMicroelectronics has been available for some years, so apart from software development, it was just waiting for Galileo satellites; however, for BeiDou it needed hardware support in the form of an additional RF front end. Additionally, while it could support all four constellations, it could not support BeiDou and GPS/Galileo at the same time, as without the BeiDou ICD the spreading codes had to be software-generated and used from a memory-based code generator, thus blocking the GPS/Galileo part of the machine.
The Teseo-3 receiver appeared late in 2013, returning to the optimum single-chip form factor: RF integrated with digital silicon and flash memory in the same package, enabling simultaneous use of BeiDou and GPS/Galileo signals. Multi-constellation in 2012 was GPS+GLONASS, which brought huge benefits in urban canyons with up to 20 visible satellites in an open sky. Now, for two hours a day in Europe while the Galileo IOVs are visible, we can run three constellations, and in the China region, GPS/BeiDou/Galileo is the preferred choice.
This article covers the first tracking of four Galileo satellites on December 4, 2012, first positioning with Galileo, and first positioning with BeiDou in January 2013. It will cover static and road tests of each constellation individually and together as a single positioning solution. Road tests in the United States/Europe will combine GPS/GLONASS/Galileo, while tests in the China region will combine GPS/Galileo/BeiDou. Results will be discussed from a technical point of view, while the market future of multi-constellation hardware will also be considered.
In the 2010–2020 timeframe, GLONASS and BeiDou (1602 MHz FDMA and 1561 MHz respectively) cost extra silicon in both RF and digital hardware, and cause marginal extra jamming vulnerability due to the 50 MHz bandwidth of the front end. The extra silicon also causes extra power consumption.
After 2020, GLONASS is expected to have the L1OC signal operational, CDMA on the GPS/Galileo frequency, and BeiDou is expected both to have expanded worldwide, and also to have the B3 signal fully operational, again on 1575 MHz. At that point we will have four global constellations all on the same band, giving us more than 100 satellites. With a clear sky, the user might expect to see more than 30, sometimes 40, satellites simultaneously.
Besides the performance benefits in terms of urban canyon availability and accuracy, this allows the receiver to be greatly simplified. While code generators will require great flexibility to generate any of the code families at will, the actual signal path will be greatly simplified: just one path in both RF (analog) and baseband (digital) processing, including all the notch filters, derotation, and so on. And this will greatly reduce the power consumption.
Will the market want to take the benefit in power consumption and silicon area, or will it prefer to reuse those resources by becoming dual-frequency, adding also the lower-L-band signals, initially L5/E5, but possibly also L2/L3/L6 ? The current view is that the consumer receiver will go no further than L5/E5, but that the hooks will be built-in to allow the same silicon to be used in professional receivers also, or in L2C implementations to take advantage of the earlier availability of a full constellation of GPS-L2C rather than GPS-L5.
This article presents both technical results of field trials of the quad-constellation receiver, and also the forward looking view of how receivers will grow through multi-frequency and shrink through the growing signal commonalities over this decade.
History
Galileo was put into the ST GPS/GNSS receiver hardware from 2006 to 2008, with a new RF and an FPGA-based baseband under the EU-funded GR-PosTer project. While a production baseband (Cartesio-plus) followed in high volume from 2009, in real life it was still plain GPS due to the absence of Galileo satellites.
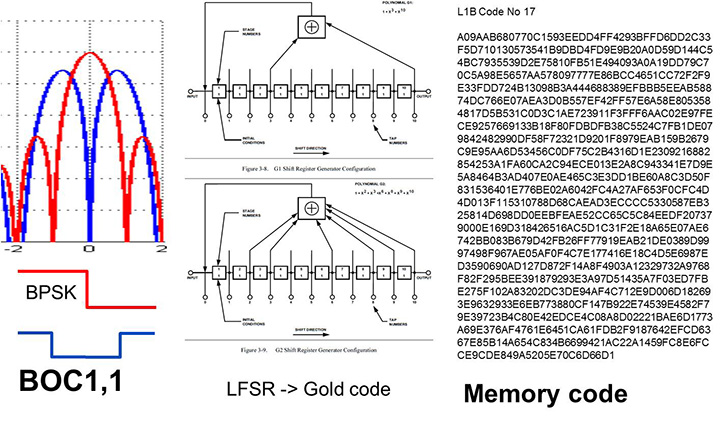
The changed characteristics in Galileo that drove hardware upgrades are shown in Figure 1. The binary offset carrier BOC(1,1) modulation stretches the bandwidth, affecting the RF, while both the BOC and the memory codes affect the baseband silicon in the code-generator area.
Figure 1. Changes for Galileo.
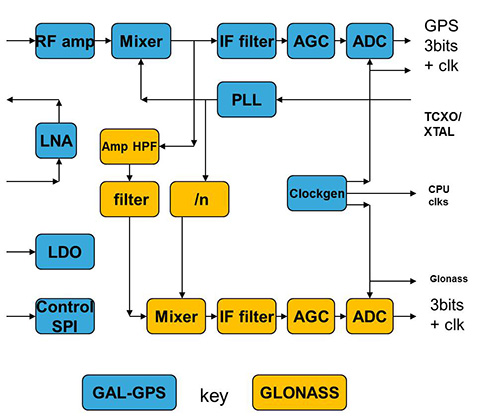
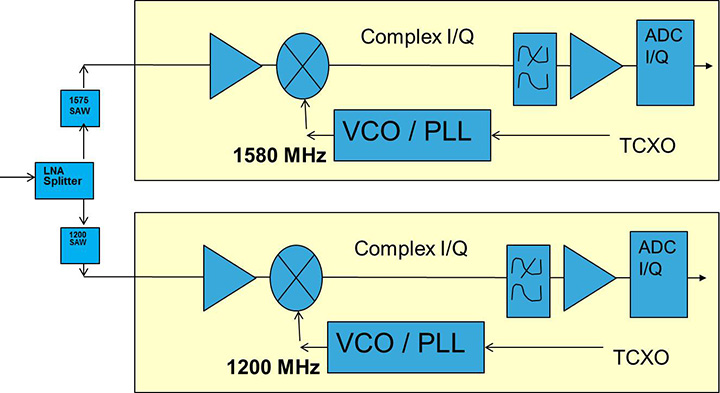
Next was the return to strength of the GLONASS constellation, meaning receivers were actually needed before Galileo. However the different center frequency (1602 MHz), and the multi-channel nature of the FDMA meant more major changes to the hardware. As shown in Figure 2 in orange, a second mixer was added, with second IF path and A/D converter.
Figure 2. Teseo-2 RF hardware changes for GLONASS.Figure 3. Teseo-2 and Teseo-3 baseband changes for GLONASS.
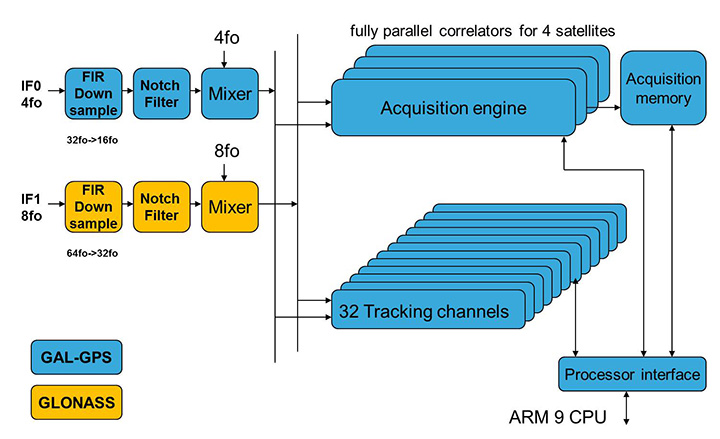
The baseband changes added a second pre-processing chain and configured all the acquisition channels and tracking channels to flexibly select either input chain. Less visible, the code-generators were modified to support 511 chip codes and 511kchips/sec rates.
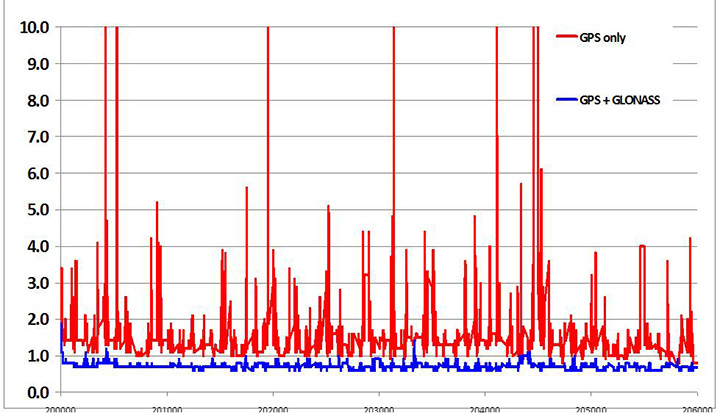
Teseo-2 appeared with GPS/GLONASS support in 2010, and demonstrated the benefit of GNSS in urban canyons, as shown by the dilution of precision (DOP) plot for central London in Figure 4. The GPS-only receiver (in red) has frequent DOP excursions beyond limits, resulting either in bad accuracy or even interrupted fix availability. In contrast, the GNSS version (in blue) has a DOP generally below 1, with a single maximum of 1.4, and thus 100 percent availability. Tracking 16 satellites, even if many are via non-line-of-sight (NLOS) reflected paths, allows sophisticated elimination of distorted measurements but still continuous, and hence accurate, positioning.
Figure 4. DOP/accuracy benefits of GNSS.
BeiDou
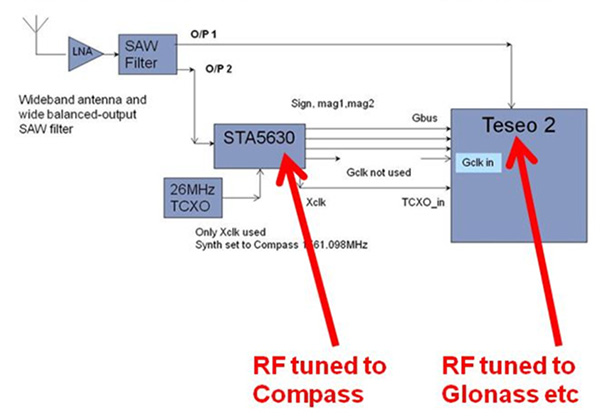
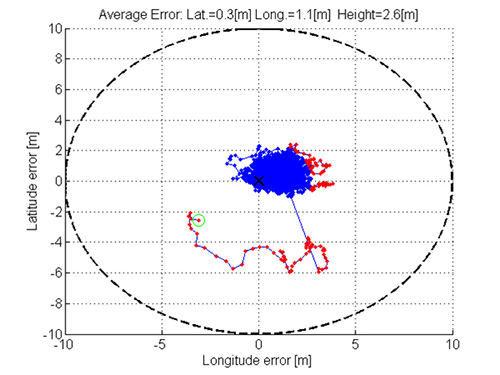
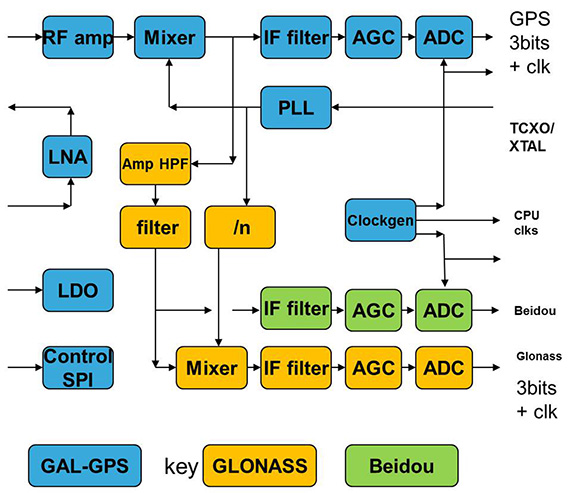
Like Galileo, BeiDou is a story of chapters. Chapter 1 was no ICD, and running on a demo dual-RF architecture as per the schematic shown in Figure 5. Chapter 2 was the same hardware with the test ICD, so all satellites, but still no positioning. Chapter 3 was the full ICD giving positioning in January 2013 (Figure 6), then running on the real Teseo-3 silicon in September 2013, shown in Figure 7.
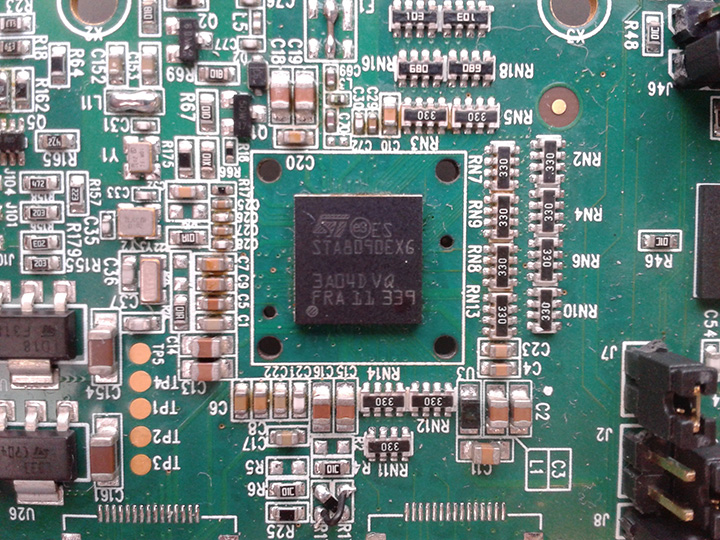
Figure 5. Demo Teseo-2 dual RF implementation of BeiDou.Figure 6. Beidou positioning results.Figure 7. Teseo 3 development board.
The Teseo-3 has an on-chip RF section capable of GPS, Galileo, GLONASS and BeiDou, so no external RF is needed.
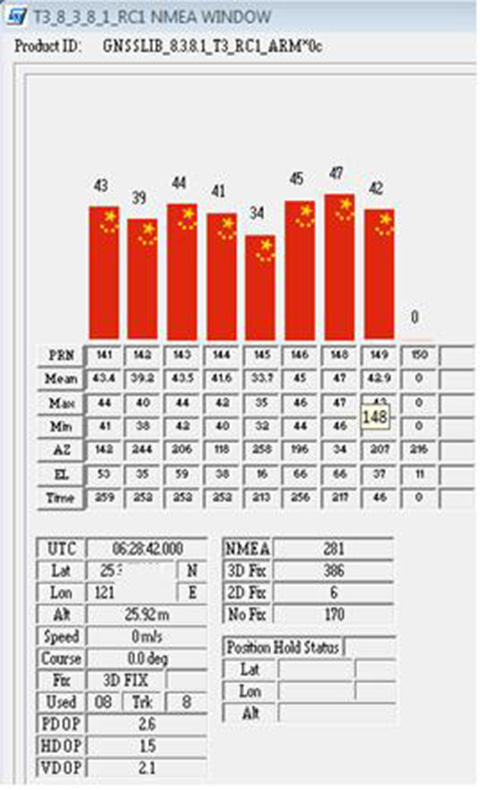
The clear green space around the Teseo-3 chip in the photo and the four mounting holes are for the bolt-down socket used to hold chips during testing, while the chip shown is soldered directly to the board. Figure 8A shows the development board tracking eight BeiDou satellites visible from Taiwan.
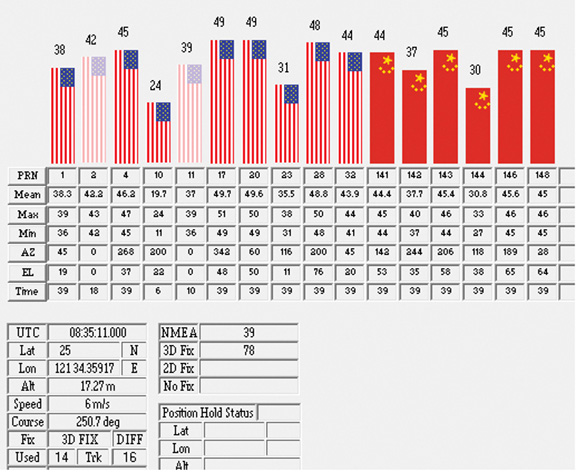
However, the silicon is not designed to be single-constellation; it is designed to use all the satellites in the sky. Figure 8b shows another test using GPS and BeiDou satellites simultaneously.
Figure 8A. Beidou.Figure 8b. GPS+Beidou.
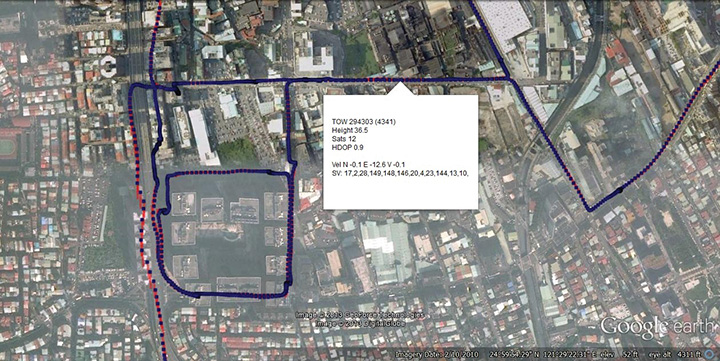
A mobile demo on the Teseo-3 model is shown running GPS plus BeiDou in Figure 9, a road test in Taipei. Satellites (SV) up to 32 are GPS, those over 140 are BeiDou, in the status window shown: total 13 satellites in a high-rise city area, though many are non-LOS.
Figure 9. GPS + Beidou roadtrack in Taipei.
Extending the hardware to add BeiDou, which is on 1561 MHz and thus a third center frequency, meant adding another path through the IF stages of the on-chip radio. After the first mixer, GPS is at 4 MHz, and GLONASS at about 30 MHz, but BeiDou is at minus 10 MHz. While the IF strip in general is real, rather than complex (IQ), the output of the mixer and input to the first filter stage is complex, and thus can discriminate between positive frequencies (from the upper sideband) and negative ones (from the lower sideband), and this is normally used to give good image rejection. In the case of BeiDou, the filter input is modified to take the lower sideband, that is, negative frequencies, and a second mixer is not required; the IF filter is tuned to 10 MHz. The new blocks for BeiDou are shown in green in Figure 10. The baseband has no new blocks, but the code generator has been modified to generate the BeiDou codes (and, in fact, made flexible to generate many other code types and lengths). Two forms of Teseo-3 baseband are envisaged, the first being for low-cost, low-current continues to have two input paths, so must choose between GLONASS and BeiDou as required. A future high-end model may have an extra input processing path to allow use of BeiDou and GLONASS simultaneously.
Figure 10. Teseo-3 RF changes for Beidou shown in green.
Galileo Again
Maintaining the chronological sequence, Galileo gets a second chapter in three steps. In December 2012, it was possible for the first time to track four IOV satellites simultaneously, though not to position due to the absence of valid orbit data. In March 2012, it was possible for the first time to demonstrate live positioning, and this was done using Teseo-2 simultaneously by ESA at ESTEC and STMicro in Naples and Milan, our software development centres.
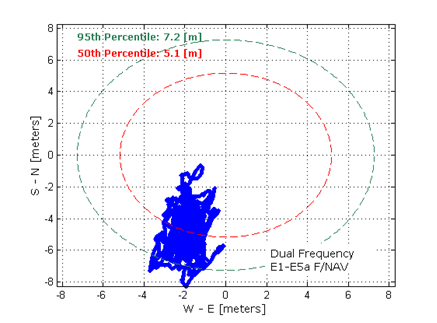
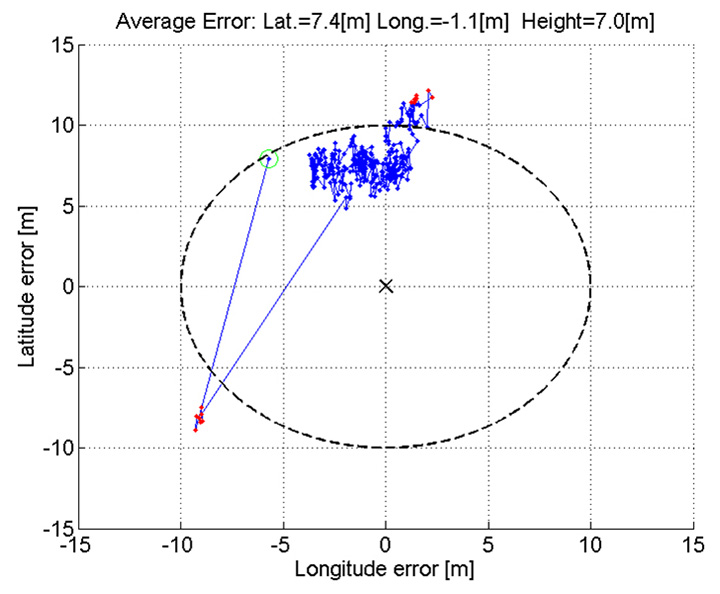
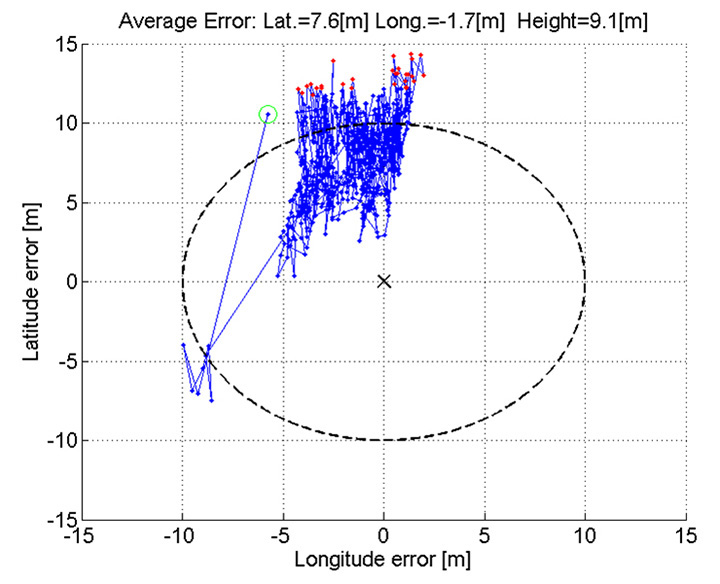
The demos were repeated in public for the press on July 24, 2013, at Fucino, Italy’s satellite earth station, with ESA/EC using the test user receiver (TUR) from Septentrio, and ST running simultaneous tests at its Italian labs. Figure 11 and Figure 12 show the position results for the data and pilot channels respectively, with independent LMS fixes. In real life, the fixes would be from a Kalman filter, and would be from a combined E1-B/E1-C channel, to take advantage of the better tracking on the pilot.
Good accuracy is not expected from Galileo at this stage. The four satellites, while orbited to give good common visibility, do not also give a good DOP; the full set of ground monitoring stations is not yet implemented and cannot be well calibrated with such a small constellation. Finally, the ionospheric correction data is not yet available. Despite these problems, the residuals on the solutions, against a known fixed position for the rooftop antenna, are very respectable, shown in Figure 13.
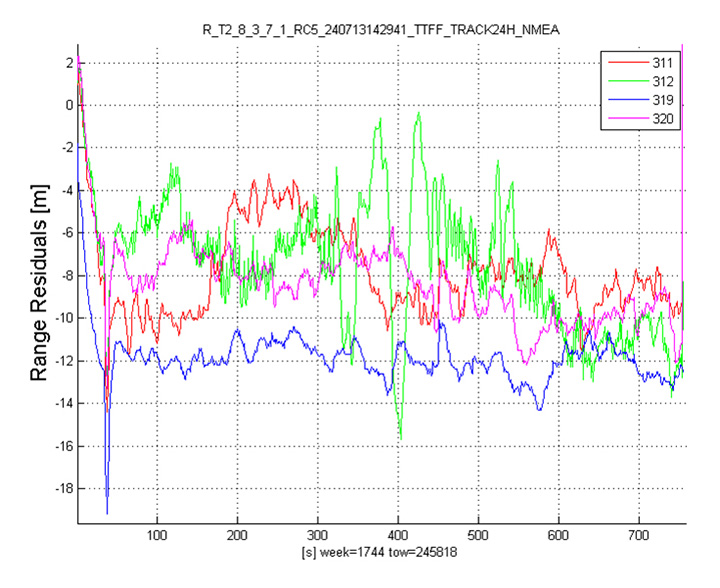
Figure 13. Galileo residuals, L1-B.
The common mode value is unimportant, representing only an offset in the receiver clock, and 10 meters is about 30 nanoseconds. The accuracy indicator is the spread between satellites, which is very respectable for a code-only receiver without full iono correction, especially around 640 on the TOW scale, where it is less than 2 meters. The rapid and major variation on the green data around t=400 is considered to be multipath, as the roof antenna is not ideally positioned with respect to other machinery and equipment also installed on the roof.
QZSS and GPS-III/L1C
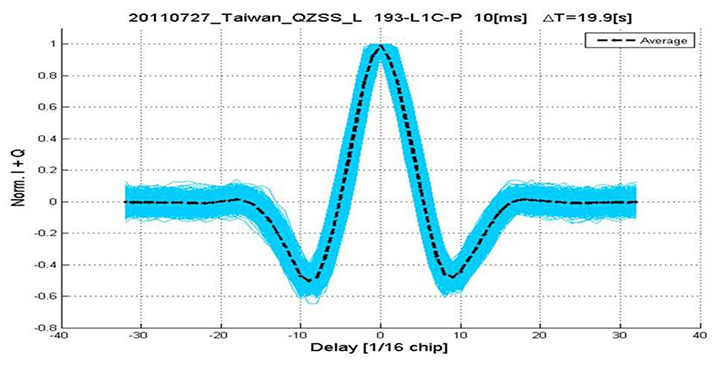
Teseo-2 has supported the legacy (C/A code) signal on QZSS for some time, but Teseo-3 has been upgraded to handle the GPS-III/L1-C signal, waiting for modernized GPS. This signal is already available on the QZSS satellite, allowing tests with real signals. Significant changes were required in the baseband hardware, as the spreading code is a Weill code, whose generation complexity is such that it is generated once when the satellite is selected, then replayed real time from memory. Additionally it is long, in two domains. It is 10230 chips — that is, long to store but also long in time, with a 10-millisecond epoch. On Teseo-3, the legacy C/A code is used to determine code-phase and frequency before handing over to the Weill code for tracking.
Using a long-range crystal ball and looking far into the future, a model of the future Teseo-4 DSP hardware is available, with 64 correlation taps per satellite. Running this on the captured QZSS L1-C signal gives the correlation response shown in Figure 14. Having multiple taps removes all ambiguity from the BOC signal, simultaneously removing data transitions, which can alternatively be pre-stripped using the known pilot secondary code (which on GPS III is 5 dB stronger than the data signal). The resultant plot represents 2,000 epochs, each of 10 milliseconds, plotted in blue, with integrated result for the full 20 seconds shown in the black dashed line. Assuming vehicle dynamics is taken out using carrier Doppler, this allows extremely precise measurement of the code phase, or analysis of any multipath in order to remove it. This RF data was captured on a benign site with a static antenna, so it shows little distortion.
Figure 14. L1-C tracking on QZSS satellite.Figure 15. Dual RF implementation of dual-band front end.
The Future
Having already built in extreme flexibility to the code generators to support all known signals and generalized likely future ones, the main step for the future is to support multiple frequencies, starting with adding L5 and/or L2, but as before, ensuring that enough flexibility is built in to allow any rational user/customer choice. It is not viable for us to make silicon for low-volume combinations, nor to divide the overall market over different chips. Thus our mainstream chip must also support the lower volume options.
We cannot, however, impose silicon area or power consumption penalties on the high-volume customer, or he will not buy our product.
Thus, our solution to multi-frequency is to make an RF that can support either band switchably, with the high band integrated on the volume single-chip GNSS. Customers who also need the low band can then add a second RF of identical design externally, connected to the expansion port on the baseband, which has always existed for diagnostic purposes, and was how BeiDou was demonstrated on T2. By being an RF of identical design to the internal one, it incurs no extra design effort, and would probably be produced anyway as a test chip during the development of the integrated single-chip version. Without this approach, the low volume of sales of a dual-band radio, or a low-band radio, would never repay its development costs.
Conclusions
All four constellations have been demonstrated with live satellite signals on Teseo-2, a high-volume production chip for several years, and on Teseo-3 including use in combinations as a single multi-constellation positioning solution. With the advent of Teseo-3, with optimized BeiDou processing and hardware support for GPS-3/L1C, a long-term single-chip solution is offered.
For the future, dual-frequency solutions are in the pipeline, allowing full advantage of carrier phase, and research into moving precise point positioning and real-time kinematic into the automotive market for fields such as advanced driver-assistance systems.
Acknowledgments
Teseo III design and development is supported by the European Commission HIMALAYA FP-7 project.
This article is based on a technical paper first presented at ION-GNSS+ 2013 in Nashville, Tennessee.
ST GPS products, chipsets and software, baseband and RF are developed by a distributed team in: Bristol, UK (system R&D, software R&D; Milan, Italy (Silicon implementation, algorithm modelling and verification); Naples, Italy (software implementation and validation); Catania, Sicily, Italy (Galileo software, RF design and production); Noida, India (verification and FPGA). The contribution of all these teams is gratefully acknowledged.
Philip G. Mattos received an external Ph.D. on his GPS work from Bristol University. Since 1989 he has worked exclusively on GNSS implementations, RF, baseband and applications. He is consulting on the next-generation GNSS chips, including one-chip GPS (RF+digital), and high-sensitivity GPS and Galileo for indoor applications, and combined GPS/Galileo/GLONASS chipsets. In 2008-2009, he re-implemented LORAN on the GPS CPU, and in 2009-2010 led the GLONASS implementation team. He is leading the team on L1C and BeiDou implementation, and the creation of totally generic hardware that can handle even future unknown systems.
Fabio Pisoni has been with the GNSS System Team at STMicroelectronics since 2009. He received a master’s degree in electronics from Politecnico di Milano, Italy, in 1994. He was previously with the GNSS DSP and System Team in Nemerix SA and has earlier working experience in communications (multi-carrier receivers).
November 29, 2013, marks the 210th anniversary of the birth of Christian Doppler. His work laid down the fundamental concepts that enabled researchers at Johns Hopkins University in the United States to make observations on the signals of Sputnik I during the International Geophysical Year of 1957. From those observations more than 60 years ago, we can trace the development of GNSS as we know it today. The very genesis of GNSS drew on the combined science, technology, and innovation from Europe, the United States, and Russia. Today, GNSS is a truly global technology that has changed for the better the lives of an estimated one billion people.
2013 also saw a major milestone in the global history of GNSS with the announcement by the European Space Agency (ESA) that the Galileo system had generated its first position fix using operational space vehicles. Here at Trimble we have for some time been providing user equipment that is ready for the modernized, multiple-constellation environment emerging in the coming years. It is still exciting to see the plans of the GNSS operators gradually become a reality, whether it is the ongoing deployment of Galileo and BeiDou or the modernization of GPS and GLONASS. There is no doubt that GNSS users worldwide will benefit significantly from these new developments, and it is natural to expect that we will see continued user-driven adoption and integration of these systems in the year ahead, together with new applications and services that make full use of the expanding GNSS capabilities.
Global Addiction to Accuracy
We have come to expect — if not demand — that technologies continuously evolve to become faster, smaller, and more cost-effective, while also providing expanded functionality and benefits. For GNSS, this expectation includes increased accuracy and precision for a growing proportion of the total user base, together with a desire to determine location in more places or, ultimately, ubiquitously.
From a technological perspective, the trend to increased accuracy is moving beyond local or regional land- or satellite-based differential augmentation toward global networks and services. New technologies such as Trimble RTX use data from a global network of GNSS stations together with global connectivity and communications to facilitate precise point positioning without the need to connect to local or regional reference station networks. Such capabilities simplify the user’s experience with precise positioning, while at the same time vastly expanding the areas on Earth where such positioning can be quickly and conveniently carried out.
Over the past decades, high-precision GNSS positioning has been adopted by increasingly larger numbers of users in the context of end-to-end work-process solutions in industries from agriculture to construction, surveying and mapping, energy, mining, utilities, transportation, and government, to name but a few. With assets, workers, and work sites spread over large geographic areas, these industries and operations have transformed how their work is done through the use of systems that incorporate real-time location information. While we should expect adoption and advancement in these areas to continue due to the compelling economic, safety, and environmental benefits provided, we should also expect to see increasing adoption of high-precision GNSS positioning in new applications such as intelligent transportation and within some proportion of the consumer user base. Accuracy is, after all, addictive.
Availability, Too. Along with accuracy, availability of position is also proving to be addictive; once we come to depend on location-enabled systems in our professional and personal lives, our needs and expectations will naturally tend toward that of continuous availability at all times and regardless of location. Although new constellations with more satellites and new, stronger signals help in this regard, augmentation of GNSS plays a key role on the path to more robust ubiquity. From a Trimble perspective, many of our new product launches during the past year incorporated deep integration of multiple measurement technologies. New systems combine GNSS with inertial measurement units, gyros, tilt sensors, seismometers, optical measurement, imaging systems, lasers, and other sensors or technologies, all enabling location and movement determination (increasingly in three dimensions) of more objects in more places — including, in some cases, even inside buildings. Looking to the future,we can expect the appetite for ubiquitous positioning to continue unabated.
Multiple sensors are also used to collect non-geographic information. Increasingly, innovation is taking place at the intersection and aggregation of many different types of data, providing new insights and enabling more informed, more timely, and more insightful decisions across almost every facet of human activity. GNSS is rapidly expanding its role as an enabling technology in this regard. While we know that delivering consistently accurate positions is a decidedly nontrivial achievement, those positions are often just one component of increasingly large and complex endeavors. In fact, much of the innovation today lies in applications that enable new, more efficient approaches to work and enterprise management, and in the creation of new and powerful analytics from aggregated data.
Global Utility, Global Business
2013 marks another important anniversary: GPS officially reached Initial Operating Capability twenty years ago on December 8, 1993. In his 2011 State of the Union address, U.S. President Barack Obama cited GPS, along with the Internet, as key examples of how government-funded fundamental research can stimulate innovation and create whole new industries. The combination of those two technologies has transformed our lives in ways even the early visionaries may not have imagined. The U.S. government has contributed to the global success of GPS in ways beyond technological innovation. Following the 1983 Korean Airlines 007 disaster (caused in part by inaccurate navigation), President Reagan declared that GPS should be free and available to all, providing a stable policy foundation upon which successive U.S. administrations have continued to build, increasingly recognizing the importance of civilian GPS applications.
Importantly, the United States strengthened this open-access policy framework by publishing the Interface Control Document for GPS, which enabled entrepreneurs and innovators anywhere in the world to bring to life their ideas about how this new technology in space could be used on Earth. For the most part, other governments have followed U.S. leadership in announcing predictable policy access to worldwide satellite positioning and timing availability, allowing innovation to take place wherever it may. In the process it spawned a truly global industry.
Technology alone has not achieved the global impact of GNSS. Rather, it is the combination of technology, a transparent, stable policy environment conducive to global innovation and adoption, and the economics of a global market that together have led to so many people today enjoying the benefits that GNSS provides. Such alignment is equally important for the future: just as GNSS from the beginning built upon knowledge and achievement from around the world, its full international potential will be best realized through global, user-driven innovation, vibrant international entrepreneurship, and robust open markets. Given that we are still far from reaching that full potential, there is good reason for us all to have great expectations of GNSS operators, the industry, and the user community in 2014 and beyond.
Peter O. Large joined Trimble in 1996 and has served as a vice president and a member of the executive committee since 2010. He holds a BSc (Hons) in surveying and mapping science from the University of Newcastle upon Tyne, UK, and an M.S. in management from Stanford University.
By Denis Lyskov, Deputy Head of the Russian Space Agency, Roscosmos
The fundamentals of Russian government policy in satellite navigation are defined in Presidential Decree #638 of May 17, 2007, and specify that:
GLONASS services are provided globally and free of any user fees;
GLONASS is used as a basis of the National Positioning, Navigation and Timing System.
To efficiently implement the government policy in satellite navigation, in March 2012 the Government approved the dedicated Federal Program focused on GLONASS sustainment, development, and expansion of applications. This program covers activities aimed at:
improving the accuracy and integrity of navigation;
ensuring conditions for guaranteed positioning, navigation, and timing solutions in restricted visibility, interference, and jamming environments;
enhancing current application efficiency and broadening application domains.
This year, the extensive efforts aimed at development of new generation GLONASS satellites, augmentations, and performance monitoring facilities were taken. The results obtained help to define the main directions of GLONASS development for the upcoming years.
Space Segment
The new navigation satellite will ensure navigation services for all categories of users using current frequency-division multiple access (FDMA) signals in L1 and L2 as well as new code-division multiple-access (CDMA) signals in L1, L2, and L3 bands. The full set of GLONASS signals will be transmitted using two separate phased antenna arrays — one for FDMA signals, and the other for CDMA signals. Introduction of new signals broadens the possibilities of improving the GLONASS orbital constellation configuration, structure and composition of navigation message data, as well as accuracy, reliability, and integrity of navigation solutions in various conditions. The constellation sustainment plan includes the launch of GLONASS-M-55 satellite in 2014. This satellite, similar to GLONASS-K-11 launched in February 2011, will carry an L3 navigation payload and transmit a CDMA signal in L3.
The L3 CDMA signal will also be transmitted from seven more GLONASS-M satellites planned for launch in 2014–2015.
The implementation of a GLONASS modernization program will produce a more than four-fold improvement of accuracy. This will be made by means of:
ground control segment upgrade;
introduction of a new on-board atomic frequency standard, based on different technologies;
introduction of advanced technologies of satellite control, based on intersatellite links in radio frequency and optical bands;
transition to PZ-90.11 Geodetic Reference System aligned to the International Terrestrial Reference Frame (ITRF) at the millimeter level;
synchronization of the GLONASS time scale with Coordinated Universal Time UTC (SU, for Soviet Union) at the level of less than 2 nanoseconds while keeping the UTC (SU) own long-term stability at 10-17.
Augmentations
Augmentations play an important role in improving GLONASS performance. With the launch of Luch-5V into an orbital position of 95° E in 2014, the first phase of the System of Differential Correction and Monitoring (SDCM) constellation deployment will be completed. SDCM will provide satellite-based augmentation services (SBAS) in L1 (1575.42 MHz). Simultaneously, the deployment in the Far East of the Russian Federation of uploading and monitoring facilities for Luch-5A positioned at 167° E will be completed. Special attention is being paid to ensuring compatibility of Luch-5B satellite (16° E) and Inmarsat-3F2 satellite (15.5° W) carrying a European Geostationary Navigation Overlay System (EGNOS) payload.
The future transition to using heavier satellites carrying L1/L5 transponders will present an important stage of SDCM development. The first launch of such satellites is tentatively planned for 2018.
With the purpose of improving the quality of SDCM services, the ground network consisting of several dozen sites will be deployed over the Russian territory, and more stations will be deployed along the Russian border to improve the accuracy of generating the vertical ionospheric delay map.
Apart from SBAS technology development, a system for ensuring Precise Point Positioning (PPP)service is planned for development. PPP service will be provided using geostationary Earth-orbit (GEO) satellites transmitting in L1/L3 GLONASS bands. The L1/L3 transponders are planned to be installed on board future GEO satellites. Considering the common parameters (carrier frequency, pseudorandom noise pulse rate, data rate) of PPP and GLONASS’ own signals, the informative capacity of the former is an order of magnitude greater to ensure rapid broadcast of high-precision orbits and clocks.
For PPP technology development, the global network of measuring facilities is of extreme importance. The global network ensures global monitoring of navigation signals and generation of initial data for high-precision determination and prediction of orbits and clocks.
International Cooperation
Cooperation with GNSS providers focuses on protecting the spectrum allocated to radionavigation satellite service, pursuing compatibility and interoperability of GLONASS and SDCM with other GNSSs and augmentations, creating an international GNSS monitoring system.
One of the priority directions of international scientific cooperation is the cooperation with the International GNSS Service through the exchange of measurement information between its members. At the same time, GLONASS measuring and monitoring facilities will receive and monitor all open navigation signals of all GNSSs.
A lot of attention is paid to enhancing GLONASS awareness. Since 2009, the International School on Satellite Navigation has been held annually in the Russian Federation. The Russian Federation has been preparing to host the United Nations Workshop on the Applications of Global Satellite Navigation Systems.
Denis Lyskov is state-secretary, deputy head of the Federal Space Agency of Russia (Roscosmos). He started his carrier in the Russian space industry after graduation from the Moscow Aviation Institute in 1996. He has been working in Roscosmos for the last two years and supervising the GLONASS program since June 2013.
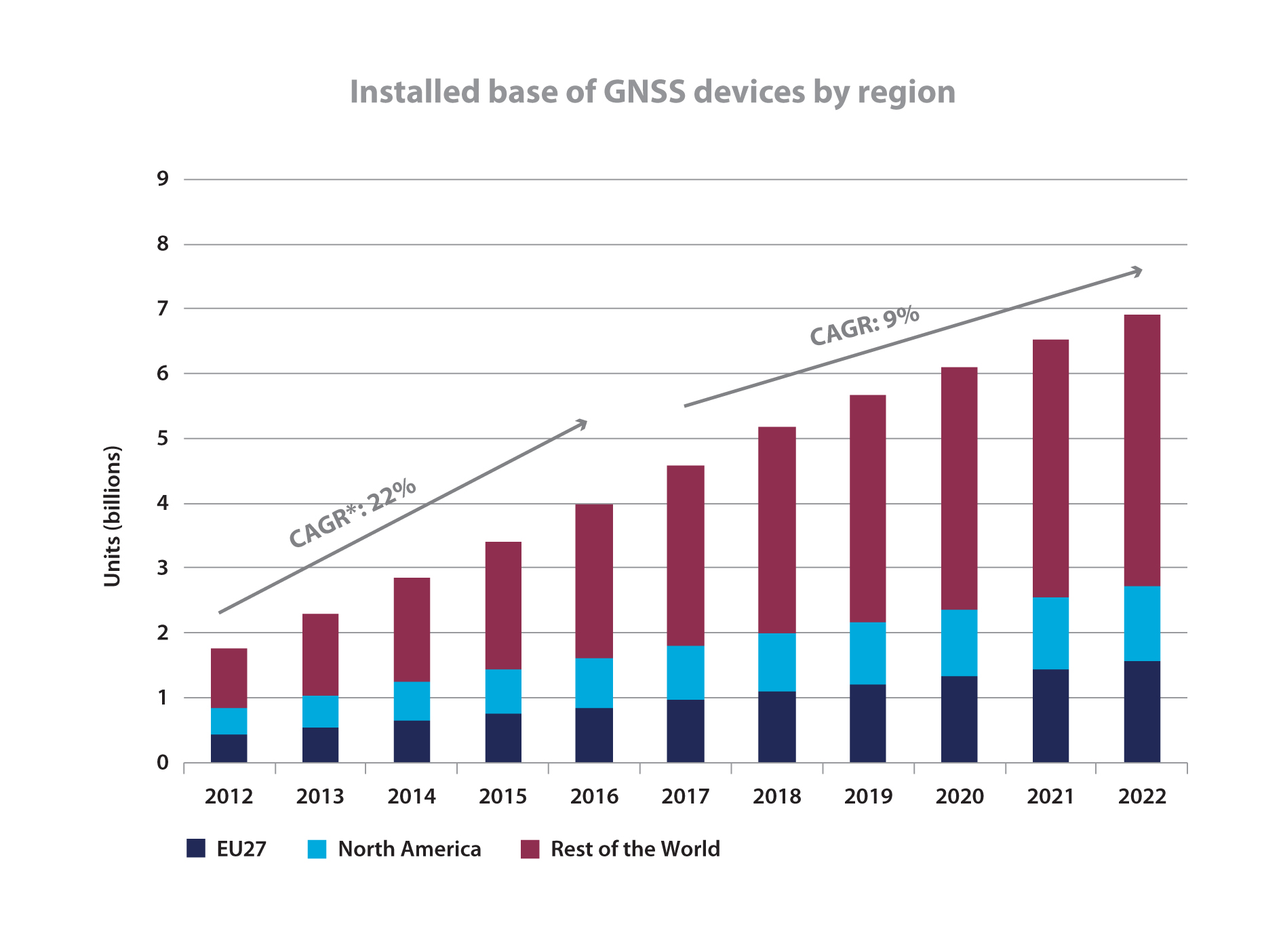
The tech press and broad public media have both made much ado about a November market report from the European GNSS Agency (GSA). Most accounts have focused on a GSA prediction of an installed base of 7 billion GNSS-enabled devices worldwide by 2022, and nearly every account has replicated the GSA math to trumpet “almost one for every person on the planet.”
Oh Hosanna. We (will) have reached holy ground at last.
Other than asserting that this bonanza “has the potential to deliver additional significant benefits, not measured in this report, especially in terms of time and fuel savings, as well as efficiency gains,” neither the GSA itself nor any pundit’s account of the report that I have seen ventures to speculate on how this might actually change daily human life. Hopefully ‘twill not be on the order of how cell phones have affected society, communication, and interaction; read tweeting and social-network stress. But knowing what little we do about human nature, this possibility is not at all to be discounted.
Allow me to walk the plank out into left field long enough to quote from a 2009 NBC News Science report titled “Is Twitter evil?” “Researchers probing the workings of the brain have found that it takes longer for feelings of social compassion and admiration to register on our neural circuits — and they worry that the rapid-fire effect of texting and tweeting could have ‘potentially negative consequences’ for our moral fiber.”
Could total, global, continuous, pervasive location-awareness in the palm of everyone’s hand possibly lead down a similar path? I’m sure that cell-phone enthusiasts also promised vast, billionish-plus benefits, with absolutely no downside, three decades ago.
If I can pry myself back from Nostradamus mutterings — and I am sure you are glad that I have now done so — the GNSS Market Report Issue 3 contains a great deal of data worth considering.
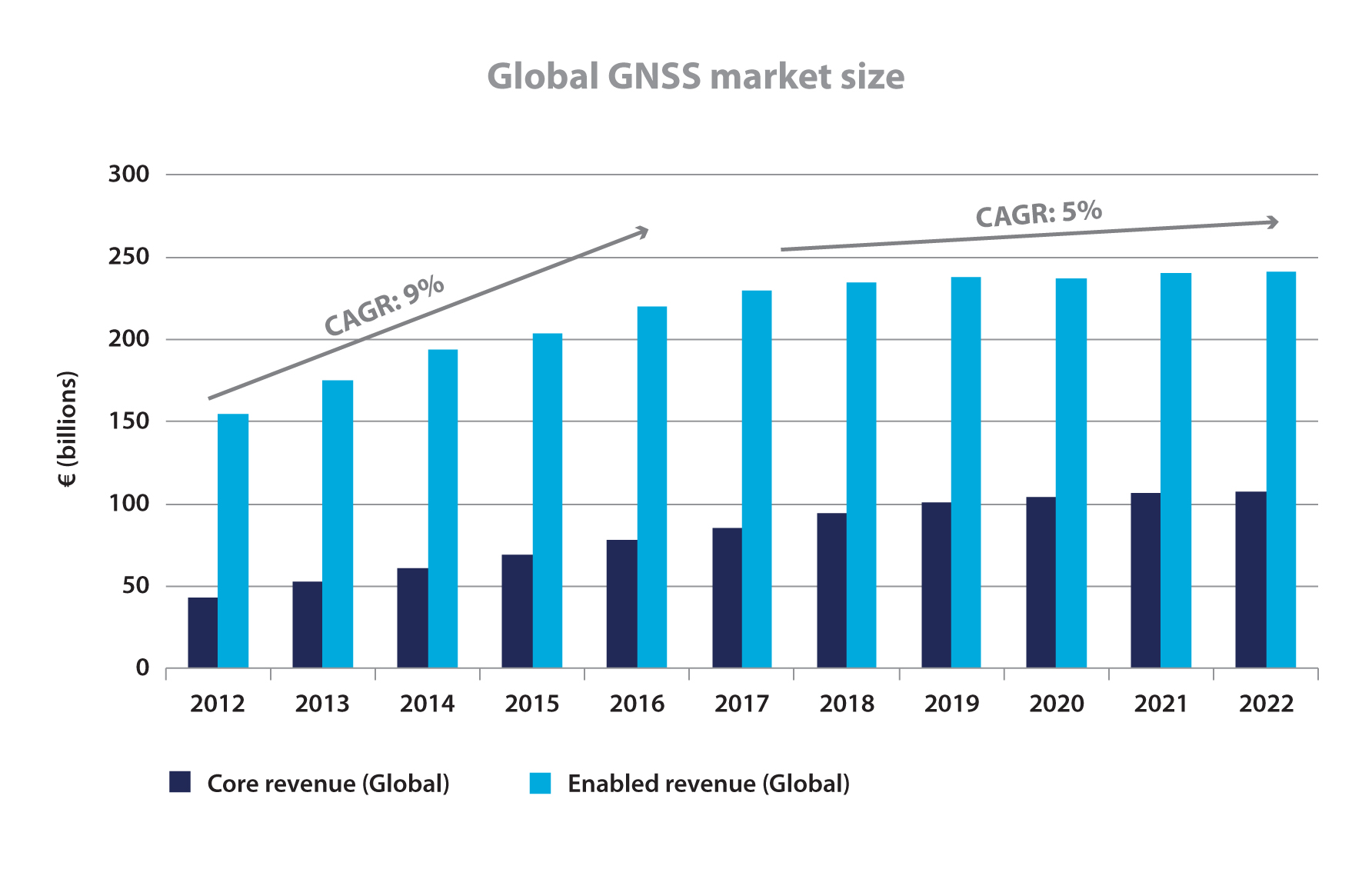
Said document foresees compound annual growth rates (CAGRs) for “GNSS core” and “GNSS-enabled” revenues increasing by 9 percent through 2016 and 5 percent through 2020, to attain €350 billion ($478 billion) per year. Of the 2022 total, GNSS core revenues will comprise about €100 billion (US$137 billion).
To further differentiate “core” and “enabled,” this from the report’s early Market Definitions section:
“This market report primarily considers the core GNSS market. For multi-function devices, such as smartphones, the core market includes the value of GNSS functionality only (rather than the full device price) and service revenues directly attributable to GNSS functionality (e.g. data downloaded by smartphones to use Location-Based Services).
“For multi-function devices, a correction factor is taken into account, for example:
• GNSS-enabled smartphone: only the value of GNSS chipsets is counted, estimated at 1% of the price.
• Personal Navigation Devices (PNDs): 100% of retail value since GNSS is the key enabler.
• Aviation: the value of the GNSS receiver inside the Flight Management System is taken into account.
• Precision agriculture system: the retail value of the GNSS receivers, maps, and navigation software is counted.
“The Executive Summary also presents results for the enabled market. The enabled market represents the services and devices enabled by GNSS, and includes the core market. For the enabled market, the entire retail value of the smartphone is included.”
The 72-page report breaks out market segments, focusing in turn on: location-based services (LBS), road, aviation, rail, maritime, agriculture, and surveying. The weight of the report, as you might guess by the necessity of reaching that 7 billion figure, falls primarily on LBS, a heading that for the GSA encompasses “smartphones, tablets, digital cameras, laptops, fitness and people-tracking devices, and mobile-data revenues.”
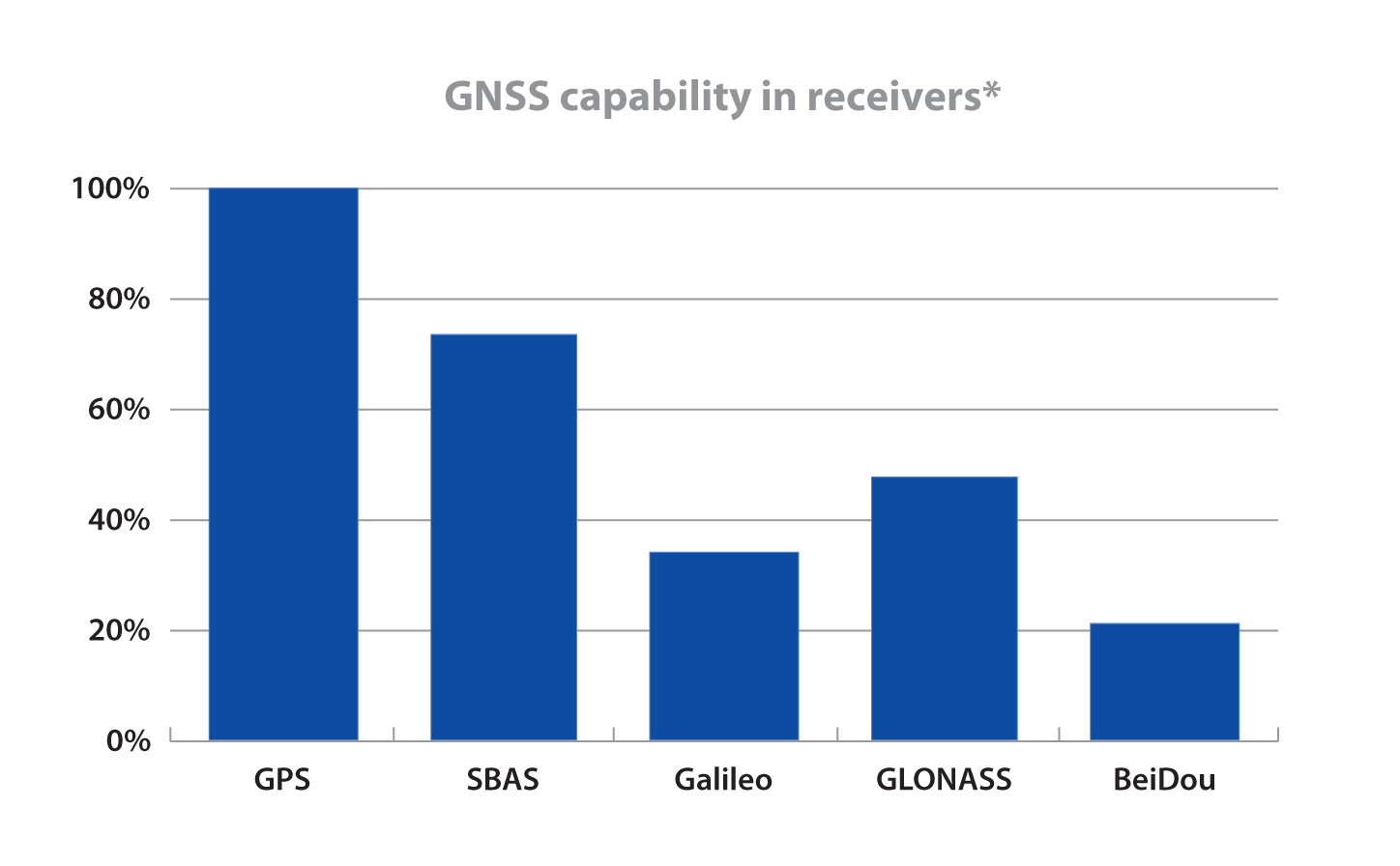
What’s good for the mass market must surely be good for satellite makers and operators around the world, as they attempt the jump from one to many systems. That’s the underlying but unstated premise of the report. “Multi-constellation receivers become widely available on the market” trumpets the Executive Summary headline on page 8. In what is certainly the money pitch for the Prague-based, European Union-funded agency, “Galileo is recognised as a valuable element in multi-constellation systems, and it is already present in more than 30% of receiver models, well ahead of its full operational capability.”
Nevertheless, GLONASS is the second GNSS constellation choice of receiver manufacturers after GPS.
For BeiDou, the researchers will only venture that “Several equipment manufacturers, particularly those based in Asia-Pacific, have started to offer BeiDou-enabled models.”
More than 70 percent of models on the market are GPS-SBAS capable (SBAS comprising WAAS, EGNOS, and MSAS) and this penetration will grow further.
In a final provocative note (neither final nor provocative from the GSA’s point of view, although I confess it causes me a vague unease), the four-fold increase in the number of GNSS devices will be “largely driven by increased penetration in regions outside Europe and North America.”
Production of the report relied on “advanced forecasting techniques together with a validation process with market experts.”
Lest you feel unfairly treated by my curmudgeonly take, here is some actual data generated by and taken from the report.
Global GNSS Market Size, from GNSS Market Report 2013 Issue 3Installed Base of GNSS Devices by Region, from GNSS Market Report 2013 Issue 3GNSS capability in receivers, from GNSS Market Report 2013 Issue 3
Phones sold in Russia will have to use GLONASS or GLONASS + GPS as of 2014, according to a report from the Voice of Russia. Phones with only GPS will be illegal in Russia, and any mobile devices imported will have to support GLONASS.
A new bill claims that in order to guarantee stable operation of a unified telecom network in Russia regardless of conditions, it’s necessary that the satnav system used be the one controlled by the Russian Federation. New requirements for mobile devices with satellite navigation capabilities are expected to follow.
The authors of the bill note that after the bill is adopted, its requirements will cover all manufacturers and vendors of cellphones, making it impossible to sell a mobile device without GLONASS support.
The Telecom Ministry and industry watchdog Roskomnadzor will oversee the changes.
Russian scientists propose a new code-division multiple-access signal format to be broadcast on a new GLONASS L3 signal. Once implemented across the modernizing GLONASS constellation, this will facilitate interoperability with — and eventually interchangeability among — other GNSS signals. The flexible message format permits relatively easy upgrades in the navigation message, if required.
By Alexander Povalyaev
Navigation messages (NM) developed and broadcast so far, by both GPS and GLONASS, are fixed, regular structures including pages (frames), subframes (rows), and words. Despite their simplicity, such structures are very conservative. The only possibility to update such navigation messages is restricted to the use of previously allocated backup frames. Increasing numbers of such frames make for ineffective use of navigation message transmission capacity. Conversely, the relatively small number of backup frames restricts the potential for future navigation-message upgrades.
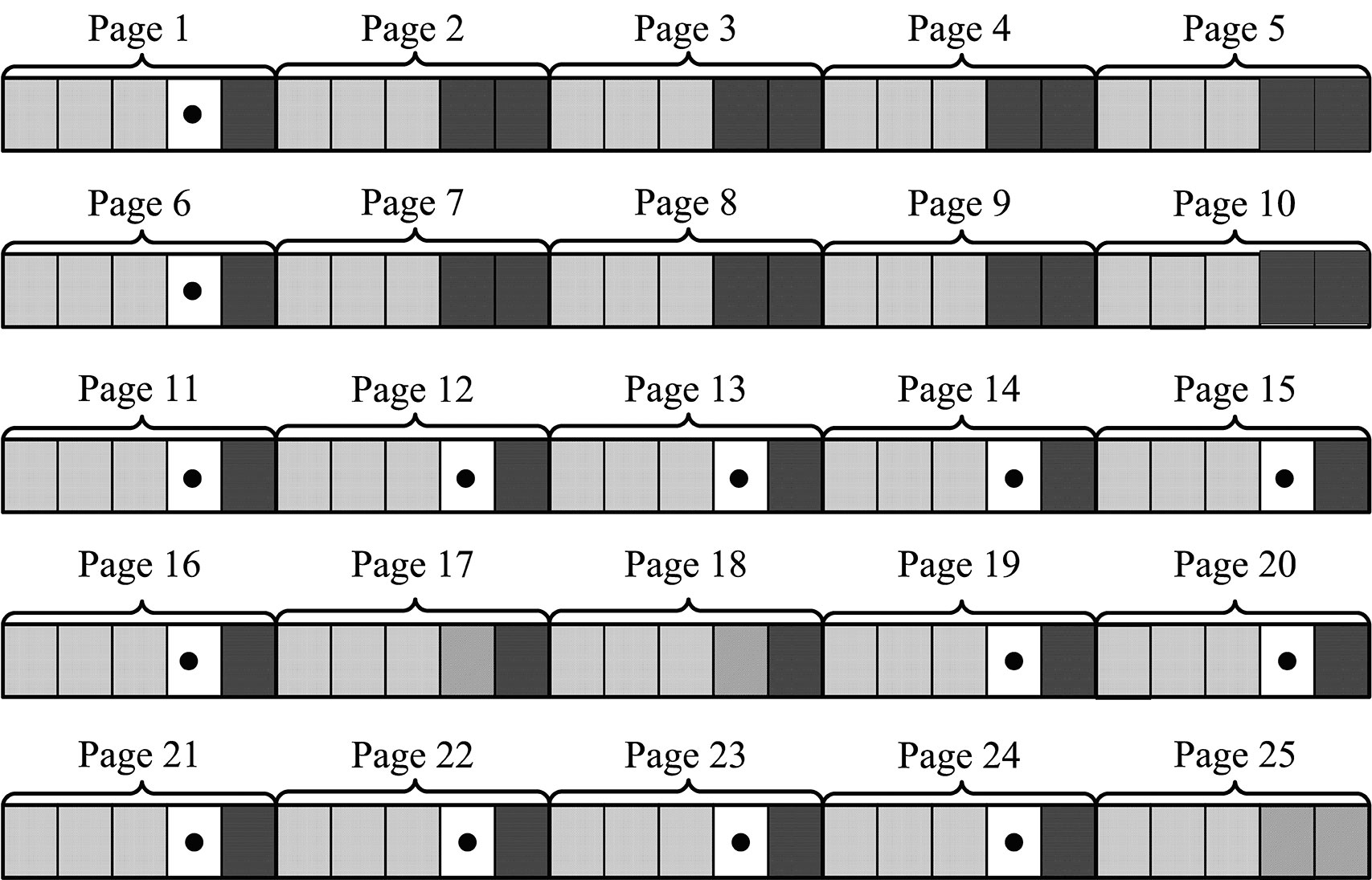
This concept is illustrated by the next two figures. Figure 1 shows the structure of GPS NM superframe.nBackup subframes are showed in bold dots. We can see that from 125 subframes of a GPS NM with a duration of 12.5 minutes, 14 subframes (or roughly 11 percent) are backup ones.
Figure 1. Backup of GPS NM superframe.
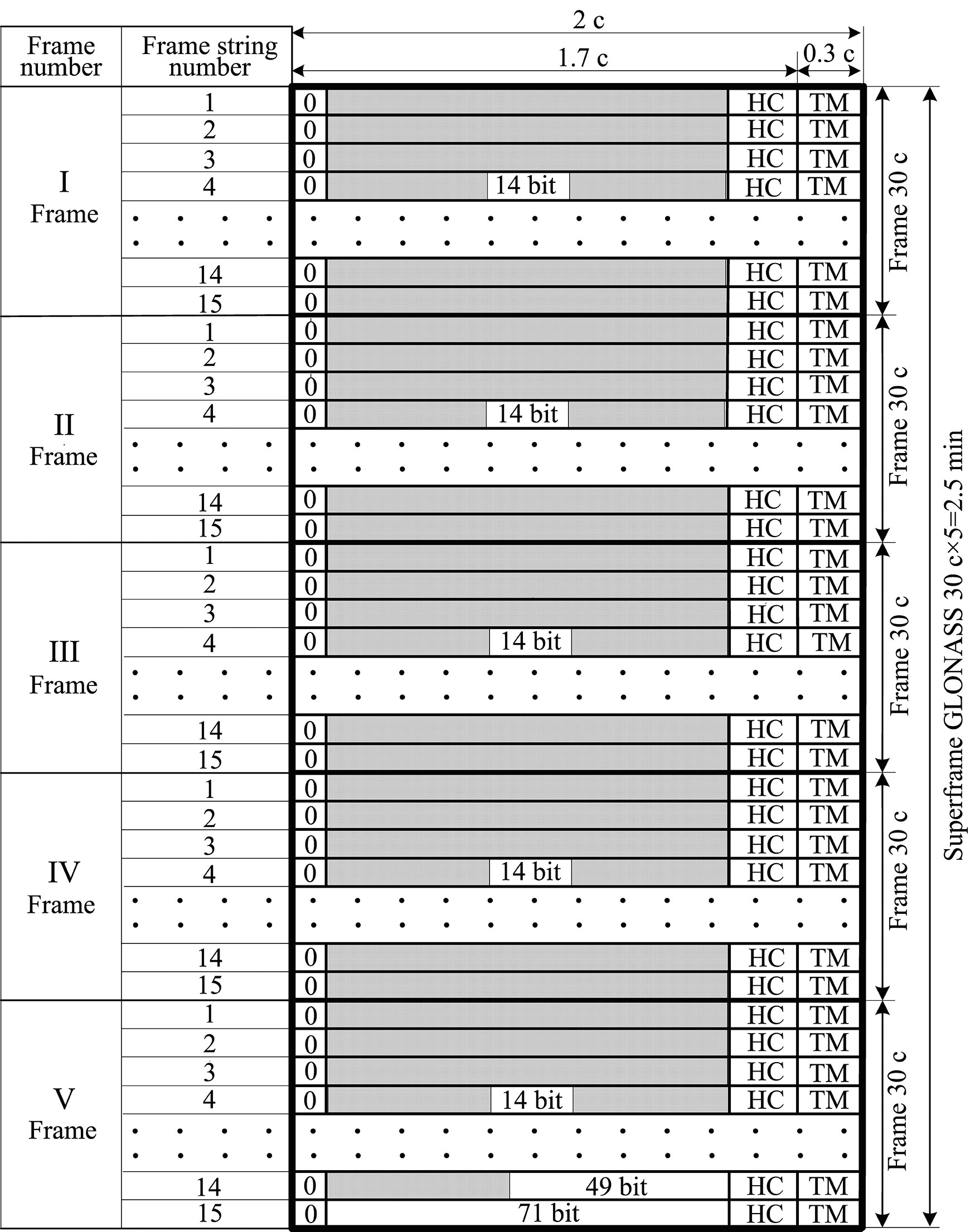
Figure 2 shows the structure of GLONASS NM. Backup frames with indication of bit numbers are shown by unhatched fields. In the GLONASS superframe with a duration of 2.5 minutes, these bits occupy only about 3 percent.
If we assume a data equivalence transmitted in the GLONASS and GPS navigation solutions, we can see that data transmission rate in GLONASS is five times as much as in GPS. This is explained by the higher redundancy of the GPS NM. Besides the roughly 11 percent of subframes kept in backup, the GPS superframe reserves field for transmission of 32 satellite almanacs, although the number of satellites in GPS constellation is always less than 32. As a result, the NM transmission channel in GPS used ineffeciently.
For GLONASS, the situation is different. The NM includes only about 3 percent of backup bits, and the superframe reserves field for transmission of only 24 satellite almanacs. This significantly increases the NM transmission channel efficiency relative to GPS, but causes big problems during any process of system update.
In these cases, upgrades or updates should only occur when they furnish backward compatibility, which means that previously manufactured user equipment can still maintain its compatibility with the updated system. When generating a NM in the form of fixed, strictly regular structures including pages (frames), subframes (rows), and words meeting the backward compatibility principle, this means that update sonly can be done using backup frames, because modification of basic, non-redundant frames will produce problems with earlier user equipment health. From this point of view, a large number of backup frames in very preferable.
Difficulties. As an example, let us consider the problems that arise in the process of a GLONASS upgrade, the purpose of which is to increase the number of GLONASS satellites in the constellation up to 30. Such an upgrade can be done in order to exclude areas of dilution of precision (DOP) degradation that arise due to GLONASS’s symmetrical constellation geometry. To provide that the rule of backward compatibility is met, it is necessary that almanacs of six extra satellites be placed in backup bits of the superframe. But the number of such bits in the GLONASS superframe (as shown in Figure 2) allows placement of only one satellite almanac. Thus in the case of such an upgrade, the almanac of the first basic 24 salellites will be transmitted within the time of 1 superframe, that is, 2.5 minutes, and the almanac of the xis extra satellites will be transmitted consequently in backup rows within the time of six superframes, that is, 2.5 × 6 = 15 minutes.
Figure 2. Backup of GLONASS navigation message superframe.
A New Way. Avoiding such difficulties associated with NMs with fixed, strictly regular structures including pages (frames), subframes (rows), and words is possible through the use of a NM with flexible row structure. Such a structure was formed for the first time for the GPS L5 signal. In this structure, the NM is formed as a variable-row flow of different types. Each row type has a unique structure and contains specified information type, for example: ephemeris, almanacs of specified satellites, parameters of Earth pole movement models, parameters of ionosphere delay models, and so on.
User equipment allots a successive row from the flow, defines its type, and in accordance with the type allots data contained in this row. When using such NM structure, strict regularity of different data types received by user equipment is disturbed, but GNSS control system guarantees that data transmission delays for each data type in NM will not exceed maximum values previously defined in the interface control document (ICD). For example, rows with ephemeris data in the GPS L5 signal are transmitted a minimum of once every 24 seconds, the so-called restricted almanac of the system is transmitted minimum once every 10 minutes, and so on. (See the “Navstar GPS Space Segment/User Segment L5 Interfaces, IS-GPS-705,” www.navcen.uscg.gov/pdf/Number.pdf.)
Deploying a Growing GNSS. A flexible row structure of the NM provides more effective use of NM transmission channel capacity, especially during the stage of system deployment which, as experience has shown, may last several years. During this stage, the GNSS orbital constellation is not complete and thus the NM may be generated as a row flow containing almanacs of only those satellites that are actually included in the orbital constellation. Reducing the number of rows with satellite almanacs allows reducing the time interval per which ephemeris are transmitted. Obviously a NM with fixed regular structures does not permit this capability.
The main advantage of a NM with flexible row structure is the possibility of its evolutional upgrade meeting the rule of backward compatibility. For this purpose, the ICD of respective signals for developers of user equipment states that if the user equipment encounters unknown row types, it should ignore them. This allows adding new row types in the process off GNSS upgrade. Including rows of new types in the NM certainly lowers the transmission rate, relative to rows of old types.
Previously manufactured user equipment ignores rows with new types and therefore does not use innovations introduced in the process of GNSS upgrade, but at the same time its health is not affected. More recent user equipment gets the opportunity to use data both from old and new row types and therefore to use introduced innovations.
In this case, user equipment upgrade replaces old software versions with new ones. This replacement is not due to any invalidity of old software version, but the equipment owner’s desire to benefit from the innovations introduced by GNSS.
Very old row types may on the other hand be removed from NM. At that point, very old and not-upgraded user equipment would become non-operational. This situation is quite normal because it may be considered as excluding excessively obsolete user equipment from operation.
When using flexible row structure, a GLONASS NM upgrade as in the previous example on exceeding the number of satellites up to 30 would mean simply exceeding the number of rows with the type defining the structure of almanac data. In this case, transmission rate of ephemeris and almanac would certainly degrade a little, but it would require no conversion of user-equipment software.
Status. Currently GLONASS uses signals with frequency separation in L1 (1592.9 – 1610 MHz) and L2 (1237.8 – 1256.8 MHz). The system upgrade now underway will in the long-range outlook turn to signals with code-division multiple-access (CDMA) in L1, L2, and L3 (1190.35 – 1212.23 MHz). One satellite has been launched transmitting signals with code separation in L3.
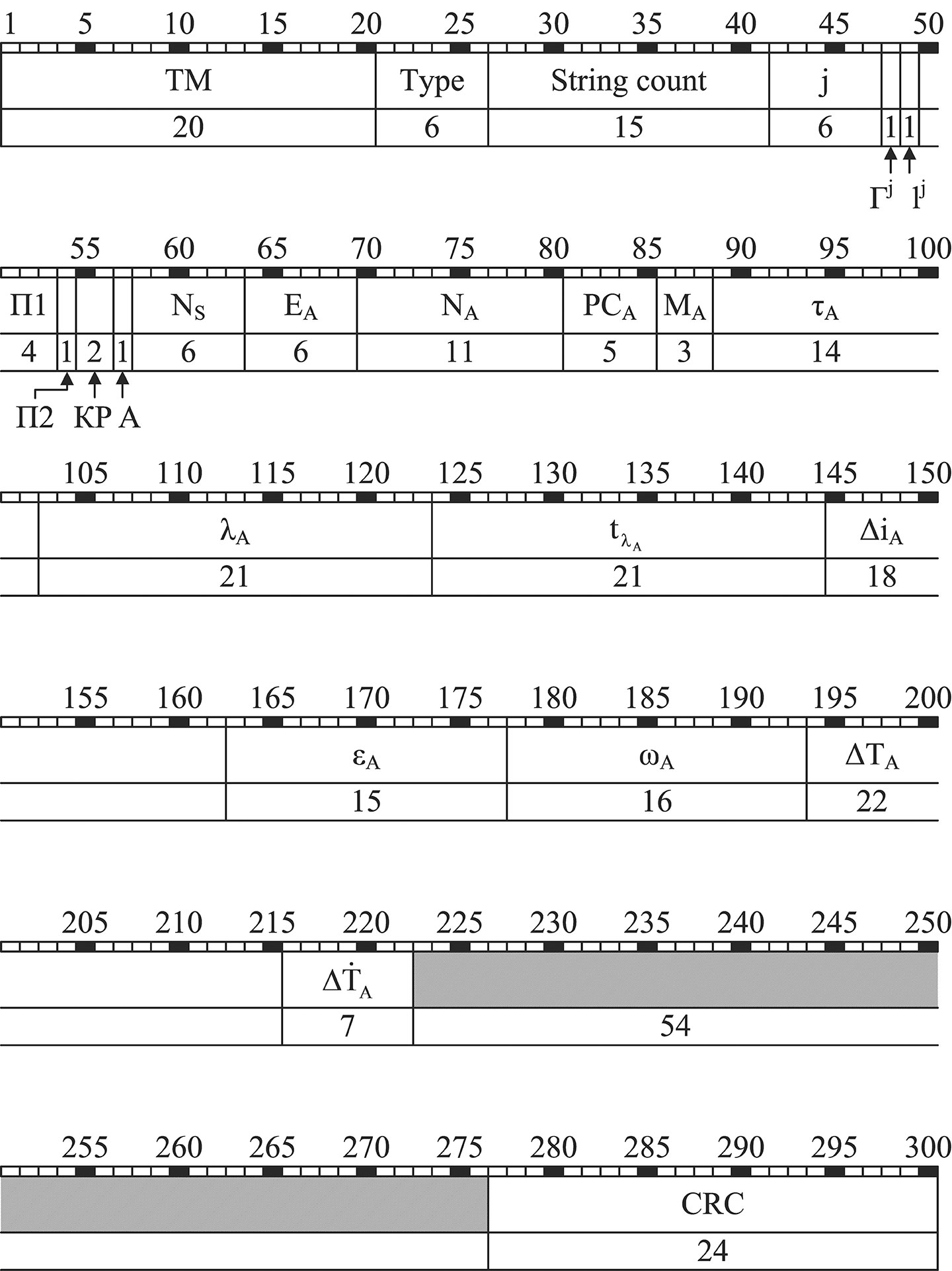
The NM of all new GLONASS signals with code separation, or CDMA, will have flexible row structure. Documents are now being developed concerning NM row structure of this type. For example, Figure 3 shows the structure of 20throw type for open signal L3OC with code separation in L3 containing almanac. L3OC signal rows contain 300 bits and have time interval of 3 seconds.
Figure 3. The structure of 20th row type for GLONASS open signal L3OC with code separation.
Parameters shown in Figure 3 have the following meaning:
TM time mark signal Type row type (in this case = 20) String count time mark numeralization; j number of satellite transmitting present NM Гj health operative feature («0») or unhealth operative feature («1») of satellite j navigation radiosignal lj reliability feature («0») or unreliability feature («1») of NM data in the current row with number j; П1 service bits for calling ground control system (НКУ) П2 satellite orientation mode feature: П2 = 0, satellite is in orientation mode to the Sun; П2 = 1, satellite is in the mode of anticipatory turn or in the mode change status (Sun orientation and anticipatory turn) КР feature of planned correction of onboard time scale (OTS) by ± 1 sec at the end of Greenwich current quarter А anomaly feature of the following row which, when onboard time scale has been corrected by ± 1 sec, will have 2 or 4 sec CRC control bits of cyclic redundancy code.
The above parameters of 20th row type are service parameters. Their content remains unchanged for all NS rows of L3OC. The following parameters of 20th row type are information parameters. Ns the number of satellites in the current constellation EA satellite almanac age NA calendar day number within 4-year interval to which almanac belongs РСA status register of navigation radiosignals L1, L2, L3 MA satellite upgrade with the number j τA correction for transition from OTS of the satellite with number j to GLONASS time scale (GTS) λA geodetic longitude of the first ascending node of the satellite orbit with number j within the day with number NA tλA the time (according to the Moscow decree time) when the satellite with the number j transits the first ascending node within the day with number NА ΔiA correction to the orbit inclination average value (63º) for the satellite with the number j εA satellite orbit eccentricity with the number j ωA satellite orbit perigee argument for the satellite with the number j ΔTA correction to average value (43,200 seconds) rate of change of Zodiacal orbital period for the satellite with the number j ΔTA Zodiacal orbital period for the satellite with the number j.
Acknowledgment
The author would like to thank Sergey Karutin and Dmitry Lerner for help in translation of this paper.
Alexander Povalyaev is deputy head of division in JSC Russian Space Systems and a professor at the Moscow Aviation Institute. He has been developing methods and algorithms for GNSS carrier-phase measurements processing for more than 30 years. Currently he focuses on developing new code-division GLONASS signals.