An interagency agreement for the maintenance, development and use of GLONASS was signed Dec. 5 between Russia’s Ministry of Transport and the Russian Space Agency, according to Roscosmos.
The agreement seeks to increase the efficiency of the use of civilian infrastructure for the development of GLONASS coordinate-time and navigation for the Russian Federation, as well as international cooperation in the field of satellite navigation.
Priority areas of cooperation will be:
integration of resources in departmental networks for tracking GNSS signals to improve the performance of coordinate-time and navigation in Russian Federation territory using GLONASS, and improving the safety and efficiency of different modes of transport;
implementation of a coordinated technical policy to support the functioning of terrestrial systems for the efficient use of GLONASS;
the creation of a center for collection, storage, use and provision of information to interested consumers on the state of GNSS;
implementation of Russian Federation policy to create conditions that promote domestic navigation technologies based on the GLONASS system abroad.
The interagency agreement will further improve certain aspects of GLONASS, which will make the services of the Russian navigation system more attractive not only for the domestic market, but also the international market.
The agreement was signed during Transport Week, an annual business event that is one of the largest Russian forums on issues of development and improvement of Russia’s transport system.
China North Industries Corporation (NORINCO) and the Russian GLONASS nonprofit partnership agreed to establish a joint venture to promote worldwide services based on GLONASS and BeiDou, according to a report in the Russian daily newspaper izvestia.
The two parties met November 11 in the Chinese city of Zhuhai. Under the agreement, the parties will identify existing technological competence that will be the foundation for the joint venture, and seek government support for joint initiatives to promote abroad.
Before the establishment of the joint venture, the parties agreed to establish a Russian-Chinese center for the implementation of satellite navigation technologies in the civil sphere. According to the agreement, “The center will be the controlling authority in determining the future direction of the joint venture and will deal with administrative issues related to the establishment of the future joint venture.”
Another topic at the meeting was the feasibility of establishing an international techno park dedicated navigation topics using GLONASS and BeiDou. China already has two specialized industrial park focused on developing technologies based on BeiDou.
NORINCOis a Chinese company that manufactures vehicles, machinery, optical-electronic products, oil-field equipment, chemicals, light industrial products, explosives and blast materials, and civil and military firearms and ammunition. NORINCO is also involved in domestic civil construction projects.
Topcon Positioning Group said that its latest GNSS reference receiver, the NET-G5, is capable of tracking a new signal from the GLONASS constellation.
The GLONASS-M 55 satellite was launched in June 2014 and is equipped with the experimental payload capable of transmitting signals in the L3 frequency band. Engineers successfully tracked the signal with the NET-G5 receiver during a series of recent tests at the Topcon Technology Center in Moscow. The use of signals in L3 band alongside L1 and L2 bands is expected to further enhance the competitiveness of the GLONASS system.
“Topcon is committed to continually investing in research and development to offer end-users and the industry the most up-to-date solutions,” said Ivan Di Federico, chief strategy officer for Topcon Positioning Systems. “Our premier engineers, scientists and designers bring world’s first products and technologies to market, and the ability of the NET-G5 to track the latest signal — a first for the industry — is an excellent example of that dedication.”
Using Vanguard and Universal Tracking technologies, the NET-G5 receiver incorporates 452-channels capable of tracking the full GNSS signal spectrum, including modernized GPS, GLONASS, Galileo, BeiDou, QZSS and SBAS signals.
Pravda is reporting that the United States refused to negotiate with Russia to deploy GLONASS ground on its territory, citing an interview with Russian Deputy Prime Minister Dmitry Rogozin.
Rogozin stressed that no negotiations were taking place. “We have made a statement in the spring. I offered to initiate talks with the United States to deploy GLONASS infrastructure in their territory, as long as negotiations go, hang the existence of infrastructure GPS stations on the territory of the Russian Federation,” Rogozin said.
Russian specialists are excluding use of the GPS stations on Russian territory for military purposes, he said, adding that he would not reveal how this was accomplished.
“I will not expand on how we did it for obvious reasons, but we did it,” said Rogozin. “We do not want to cut off the nose to spite our face to deprive our users of the ability to work with GLONASS and GPS. Why should we create fewer opportunities for our own people? But we have completely destroyed any prospect, even an indirect one, for the use of the American navigation system for our high-precision guidance weapons,” said the official.
At the same time, it was reported that Russia and China would discuss possible joint projects in the field of space exploration. According to Rogozin, the two countries cooperate in the field of space, working on “possible joint projects in the field of space exploration.” The official said that China and Russia were having a “pretty tumultuous relationship,” and “we would like to say a big thank you to Western countries for their active development.”
The next GLONASS launch — the GLONASS-K1 satellite from Plesetsk scheduled for November 20 — is being insured for 2.17 billion rubles ($50 million US). The insurance is costing Russia 242 million roubles ($5.6 million US).
Russia has faced numerous technical difficulties in its launches. On May 15, a Proton-M satellite crashed. In 2013, Russia lost three GLONASS satellites when their launch aboard a Proton-M rocket went awry, sending the satellites crashing into the Baikonur Cosmodrome in Kazakhstan instead of aloft into space. In 2010, three other GLONASS satellites ended up in the Pacific Ocean aboard a Proton-M rocket.
The insurance covers the launch and flight tests of the carrier rocket Soyuz-2.1b, with the satellite GLONASS-K. Flight tests, according to the tender documentation, will last for three months.
Russian companies looking to develop GLONASS products and services can soon tap into an 8-billion-ruble fund. Russian state development bank Vnesheconombank (VEB) plans to offer financial support for projects using GLONASS, pending government approval, according to the Russian news agency Ria Novosti.
VEB’s sister fund, VEB Innovations, will set up the GLONASS Fund in the fourth quarter of this year, with funds made available by next February-March. The fund will include 5 billion rubles ($122 million) from VEB and 3 billion rubles ($73.1 million) from private investors.
The project is designed to expand GLONASS market share, both to acquire advanced technology and attract new customers. It aims to support small companies with new, innovative ideas. Its goals will include the creation of an investment model that will ensure that the most promising and viable projects reach market, from conception to production.
Assistance will be sought from specific European, North American and Asian technology companies, including Norway’s Q-free, Switzerland’s Saphyrion, Slovakia’s Sygic, the Netherlands’ AND, France’s Benomad, and the Germany companies Peiker, Init and IVU. Each of these companies is involved in navigation, with hardware, software, GIS and mapping software, telematics or dispatching. The GLONASS Fund concept says that by using these technologies for the development of new domestic products and services, GLONASS can achieve technical superiority in all the major segments of the global navigation and information market.
The fund’s support will include contacts with Russian trade representatives abroad to promote the Russian products in markets such as India, Latin America and the Middle East.
RIA Novosti is reporting that negotiations regarding the placement of a differential correction and monitoring GLONASS station in the United States have not yet been renewed. The news agency quotes remarks by Grigory Stupak, first deputy general designer of Russian space systems, during the Fourth International School on Satellite Navigation.
In all, 40-50 GLONASS stations are planned for placement around the world, Stupak said. “As for the United States, we now consider the option of placing a station in Alaska, but the lack of it does not significantly affect the performance of our system,” he said, adding that Russia has worked with the southern African region and South America on placement of GLONASS stations, with one station in Brazil already operational. “There also have Cuban colleagues to host GLONASS stations,” he said.
According to Stupak, taking into account developments in the world, it does not make sense to force the negotiation situation by placing a station in Alaska.
GLONASS Satellites Based Mainly on Russian Component Base
The prevailing share of the payload for both GLONASS-M and GLONASS-K spacecraft is created by JSC Russian Space Systems (CSW), but contains an element base of both domestic and foreign production, Stupak said, according to the the GLONASS Herald.
“If you take onboard equipment [for] GLONASS-M, a significant portion of its designers develop mainly on electronic components of domestic production,” Stupak said.
Including onboard equipment, while a significant portion of the GLONASS-M design is based on domestic electronic components, for the GLONASS-K, most of the components are Russian, but some foreign components are also being used.
The Institute of Navigation’s (ION) Satellite Division awarded Pratap Misra its Johannes Kepler Award on September 12 at the ION GNSS+ Conference in Tampa, Florida, for his contributions to satellite navigation education, the understanding of GLONASS, and receiver autonomous integrity monitoring.
Misra is credited with tracking GLONASS satellites using the AF Deep Space Tracking Network to determine their orbits in the coordinate frame used by GPS, while the satellites broadcast their positions in the Soviet coordinate frame. Misra is recognized for his ground-breaking work on navigation with combination of GPS and GLONASS signals and is the western world’s leading expert on what’s now the Russian satellite navigation system. He was a technical advisor to the Federal Aviation Administration for many of the bilateral and multi-lateral committees that worked on the development of GPS/GLONASS spectrum sharing and avionics.
Additionally, Misra has worked on receiver autonomous integrity monitoring (RAIM), and contributed a novel approach that does not require the simplifying assumption of Gaussian errors. He was also the first to provide a RAIM algorithm that leveraged the receiver clock to put a bound on the vertical position error. These algorithms are expected to play a significant role in the upcoming multi-constellation environment.
Misra is a research associate professor of Mechanical Engineering at Tufts University, and is well known for the textbook that he co-authored with Professor Per Enge of Stanford University, Global Positioning System: Signals, Measurements and Performance. Misra is a past chair of the ION Satellite Division and has held numerous volunteer positions within ION, most recently focusing on the support of student programs. He is both an ION Fellow (2003) and IEEE Fellow (2007).
The Kepler Award recognizes and honors an individual for sustained and significant contributions to the development of satellite navigation. It is the highest honor bestowed by the ION’s Satellite Division.
The chief of Russia’s space agency Roscosmos has discussed plans for bilateral cooperation in space with his Chinese counterparts in Beijing, according to the ITAR-TASS news agency.
“On Thursday, the chief of Roscosmos held a meeting with the head of China’s Satellite Navigation Office Ran Chengqi. The officials discussed Russian-Chinese cooperation on navigation satellite systems GLONASS and Beidou, in particular, the placement of Russian stations in China and Chinese stations in Russia,” the Roscosmos press service said.
The two sides agreed to establish a sub-commission for cooperation in the sphere of satellite navigation under the bilateral commission in charge of preparing regular meetings of the two countries’ prime ministers.
Earlier, Roscosmos deputy chief Sergei Savelyev said that Moscow this year would sign an agreement with Beijing on deploying GLONASS and Beidou stations in China and Russia respectively. Each country will accommodate three such facilities.
By Gerhard Beutler, Rolf Dach, Urs Hugentobler, Oliver Montenbruck, Georg Weber, and Elmar Brockmann
What Happened: On April 1, 2014, at 21:15 UTC, all GLONASS satellites started to transmit wrong Broadcast Messages (BM) as previously reported by GPS World. The satellite positions derived from these BM were wrong by up to ± 200 kilometers in each of the three coordinates x, y, and z of the Earth-fixed, geocentric, equatorial coordinate system. The problem disappeared after an hour (after two erroneous BM) for two GLONASS satellites; for other satellites, the problem lasted much longer: up to 10 hours. By about 07:30 UTC on April 2, the April Fools’ “joke” was over.
Effect on GPS/GLONASS Receivers
Essentially, we can distinguish two classes of receivers: those using the GLONASS BM for tracking and those not using them. The first class of receivers “became aware” of problems in real time, because GPS and GLONASS observations did not result in a consistent position estimation. In the best case, all affected GLONASS observations were flagged (and removed from further consideration) and the positioning worked properly with a reduced number of satellites. In the worst case, the receivers stopped tracking GPS and GLONASS satellites completely. The second class of receivers tracked GPS and GLONASS normally. The tracking problems created a major uproar in the user community of combined GPS and GLONASS receivers.
On June 3, 2014, at the 13th meeting of the U.S. National Space-based Positioning, Navigation, and Timing (PNT) Advisory Board, Gerhard Beutler, representing the authors of this article, delivered a presentation including an example of a permanent network of GPS and GLONASS dual-system receivers in Switzerland and neighboring countries, where about 40 percent of the approximately 60 receivers stopped tracking both GLONASS and GPS satellites. The malfunctioning receivers had to be reset manually on the morning of April 2 (for more information, see: www.gps.gov/governance/advisory/meetings/2014-06/beutler1.pdf).
Event as Viewed by the IGS
At first sight, the GLONASS April 1 and 2 event was actually a non-event for the International GNSS Service (IGS). The IGS is a voluntary federation of more than 200 worldwide agencies that pool resources and data from about 400 permanent GPS and GLONASS stations to generate precise GPS and GLONASS products.
The IGS product series, including precise GPS and GLONASS ephemerides, were generated as usual before, during, and after the event. On April 4, a quick analysis by Urs Hugentobler revealed that only the GLONASS BM were affected; the GLONASS code (pseudorange) and phase observations and the GLONASS satellite clock corrections, were not affected.
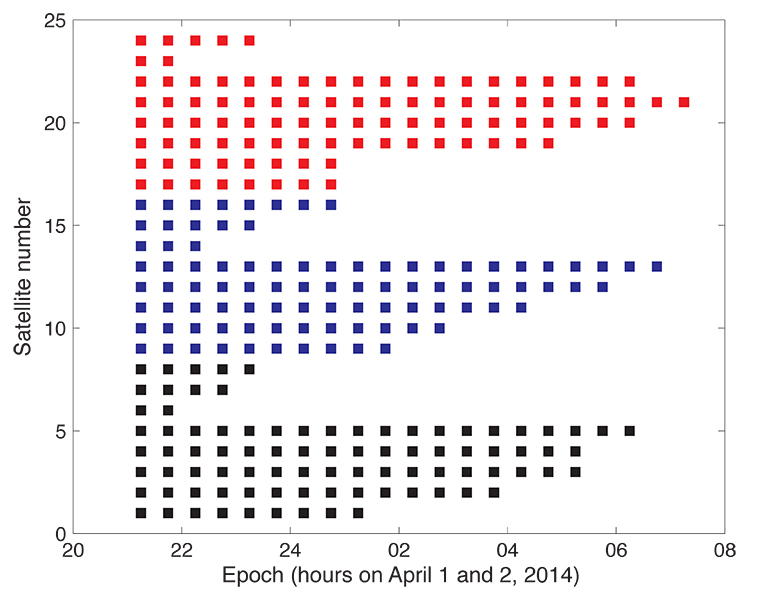
Figure 1 shows that the GLONASS event started simultaneously for all satellites (for stationary receivers, the first wrong positions were calculated for 21:00 UTC, based on the BM with Time of Clock (ToC) at 21:15 UTC). The problem was fixed for the first two satellites (the GLONASS satellites in orbital slots 6 and 23) one hour later; the last satellite wasn’t fixed until 07:30 on April 2 (using the correct BM at 07:45).
Figure 1. Affected broadcast messages for each GLONASS satellite. Colors indicate the different orbit planes.
More than 60 percent of the more than 200 combined GPS and GLONASS receivers in the IGS network tracked the GLONASS satellites normally. Fewer than 40 percent of the combined-constellation receivers had serious data outages (for GLONASS or even for both GLONASS and GPS). The number of GLONASS observations used in the daily work of the IGS analysis centers (ACs) was, however, only reduced by about 10 percent on April 2 (and even to a lesser extent on April 1). The small reduction is explained by the fact that only the last three and the first seven hours of April 1 and 2, respectively, were affected.
As the IGS ACs do not need the BM (neither for GPS nor for GLONASS), but may rather use their predicted orbits derived from the precise ephemerides of the preceding days, the number of good observations was still amply sufficient to calculate precise GLONASS orbits for April 1 and 2, essentially at the expected accuracy level.
Detailed Analysis
To further explore the structure of the problem, the BM-derived satellite positions were used as pseudo-observations in an orbit determination process. Orbit determination was successful when analyzing only “good” positions (prior to April 1, 21:00 or after April 2, 07:30). Orbit determination was successful, as well, when using only positions from “bad” BM. Successful means that the root-mean-square (RMS) error of the orbit determination process was of the order of about 0.5 meters per satellite coordinate — the expected order of magnitude.
As the bad satellite positions are now known to obey the laws of orbital motion, one may further investigate the nature of the differences between the “good” and the “bad” orbital positions. For that purpose, the precise GLONASS orbits of the IGS Center for Orbit Determination in Europe Analysis Center served as a reference. Its orbital positions were compared in the inertial coordinate system (one not rotating with the Earth) to the erroneous BM-derived positions by means of an orthogonal transformation, where only the three rotation angles around the x-, y-, and z-axes of the inertial equatorial coordinate system were estimated.
Table 1 shows that the positions derived from the normal (“good”) GLONASS BM compare very well to the IGS precise orbits. Except for a minor rotation about the z-axis, one obtains zero-rotations about the orthogonal axes in the inertial coordinate system.
Table 1. Rotation of the entire system of good orbit positions (April 1, 0:00 – 20:45 UTC) with respect to precise IGS reference orbits (“good” BM) and rotation of the entire system of bad orbit positions (April 1, 21:00 – April 2, 07:00 UTC) with respect to precise IGS reference orbits (“bad” BM).
Table 1 also shows that the “bad” positions were obtained from the reference positions by a rotation of about 0.5 degrees around the inertial x-axis. The RMS of 71 meters should be compared to the entire effect of up to 200 kilometers per coordinate. Comparing this RMS of 71 meters with the RMS of the orbit determination of about 0.5 meters per coordinate also says, however, that the “true” transformation is more complicated than one represented by just a series of three rotations.
We did not further investigate how this more or less consistent rotation could enter into the GLONASS BM. It seems to be clear, however, that a systematic error slipped into the realization of the GLONASS BM, which were activated at a common reference epoch for all satellites (but uploaded to individual satellites at different times).
Figure 1 suggests that the problem was almost immediately recognized by GLONASS operators: already an hour later the first two satellites started to transmit BM with the usual accuracy level.
Figure 1 also supports the idea that the problem was remedied satellite-by-satellite. A back-of-the envelope calculation revealed that the satellites were above the horizon of at least one of the Russian uplink sites at the times of switching back to the correct BM.
Summary and Conclusions
The GLONASS event was one that we might have described by the phrase “such a thing can never happen.” For the user community, the situation was aggravated by the fact that the event was not reported through the official Russian channel by issuing a Notice Advisory to GLONASS Users (NAGU). This definitely should have happened in the interest of transparency.
The above analysis was based on information available through the IGS. It was performed weeks after the event. It is worth noting, however, that the information needed for the analysis was available in real time. The reference orbit used in the analyses could have been replaced by the IGS predicted orbits generated in the ultra-rapid series.
In view of the importance of BM for all users and in particular for the users of IGS real-time products, the IGS might consider monitoring the quality of BM for all GNSS.
Fixing the GLONASS Bug: Report from Moscow
In a May 23 conversation with journalists, Javad Ashjaee, president of JAVAD GNSS, decried the recent controversy about monitoring stations on both U.S. and Russian soil, saying it was based in misinformation and misinterpretations, inflated by a political crisis. He also supplied a different perspective on the GLONASS signal outage than has been reported in other media outlets.
“There was speculation in early April that it took GLONASS 11 hours to correct a software bug because it took that long for all the satellites to pass over a control station on Russian soil. This was not the case, I have learned from conversations with their engineers and with the head person responsible for all of this. One engineer made a mistake and uploaded the wrong software. Until they could find it and debug it — and it took them 11 hours to do so — they could not upload correct software to the satellites.
“The 11-hour outage was not due to a wait for all satellites to pass over ground control stations on Russian soil to receive a fresh upload of data,” continued Ashjaee. “GLONASS has the capability, like GPS, to make updates via inter-satellite communication. The delay was caused by the time it took to find the bug in the erroneous software that had been uploaded and correct it.”
Ashjaee addressed the monitoring station controversy, saying that Russia had sought GLONASS monitoring stations in the United States, not for uploading any data, but for monitoring GLONASS satellites to provide more accurate orbit and clock information, for the free benefit of all users.
A single GLONASS-M satellite was launched from the Plesetsk Cosmodrome on June 14. GLONASS-M 55 (with designation 755 once operational and also known as Kosmos 2500), was inserted into the constellation’s Plane 3 and will occupy orbital slot 21.
Manufacturer Reshetnev reported that the satellite is equipped with an experimental payload capable of transmitting signals in the L3 frequency band. The L3 signal, centered at 1202.025 MHz , is CDMA unlike the GLONASS legacy FDMA signals. The experiment will include flight testing of the new equipment and evaluation of its accuracy characteristics. The GLONASS-K1 test satellite also transmits an L3 signal.
European Space Symposium: Digest
Copernicus, “the younger brother of Galileo,” will be the main implementation of Galileo and other GNSS technologies going forward in Europe, according to to Paul Weissenberg, EC deputy director general for enterprise and industry. An Earth-observation satellite program administered by the European Space Agency to provide accurate and timely information to improve the management of the environment, understand and mitigate the effects of climate change, and ensure civil security, Copernicus was previously known as the Global Monitoring for Environment and Security (GMES).
Sliding to the Right. Galileo will make its “early-service declaration in the first half of next year,” said Matthias Patschke, director of EU satnav programs. This appears to back off slightly from previous dogged determination to declare services before the end of 2014.
The EC may propose legislation to make mandatory the use of GNSS technology in different areas: as with eCall, starting in 2015, including Galileo in the receivers inside cars, according to Marian-Jean Marinescu, member of the European Parliament.
Peter Large of Trimble spoke out against the mandating of a specific GNSS use in any market: “A bad policy outcome that moves backward into regionalization.”
I’ve written this many, many times in the past eight years that I’ve written for GPS World magazine, but I have to write it again — this is an exciting time for GNSS!
For me, high-precision GNSS is particularly exciting. I’ve been traveling like crazy, and involved in a number of really fun projects that incorporate high-precision GNSS. Of course, on these various projects I usually incorporate many types of technologies that support GNSS, such as computing, communications, power, and mechanical.
Along those lines, I find myself more and more frequently setting up custom RTK bases for companies because they’re getting cheaper and cheaper, regardless of the fact that there are an increasing number of publicly available real-time kinematic (RTK) base stations. Setting one up doesn’t just involve plugging power into a RTK base receiver and hitting the on/off switch. As I mentioned above, setting up an RTK base involves several different types of technologies. Sometimes, I set up a desktop computer next to the RTK base to act as a server to manage the RTK GNSS base and communications (both network and RTK communications) equipment.
In your mind, when you think of a desktop computer, you probably envision something that occupies 2-3 square feet (~one square meter) of desktop space, along with a keyboard and monitor. So, a consideration when deploying an RTK base is finding desk space somewhere in the user’s office to accommodate the desktop PC and other equipment.
Recently, I took a different approach. I found (actually, my client found) an incredibly small computer to be our server. Just as high-precision GNSS receivers are getting smaller and smaller, so are computers. The Intel Mini-PC measures 4 inches x 4 inches (10.16 x 10.16 centimeters) and has no hard disk. It uses solid-state drive (SSD) memory for storage. SSD technology is still somewhat expensive ($1+ per gigabyte), but it is small compared to a classical disk drive, and doesn’t have any moving parts. Furthermore, the Mini-PC has ethernet ports: when we connect a network cable to it, we could access the Mini-PC via Remote Desktop. That meant we didn’t need a keyboard or monitor. The Mini-PC had all the power we needed, and we could load any sort of control software on it because it runs the standard Windows 7 (or 8) operating system. Last but not least, the Mini-PC costs only $149. However, you need to add memory, SSD, and so on, so the real cost is ~$400 depending on your configuration. While not cheaper than similarly performing “boxes” available, it’s certainly one of the smallest.
Intel Mini-PC Measuring 4″ x 4″
In fact, it’s so small that we stuffed it inside a 14” x 12” electronics enclosure box along with the RTK GNSS base and other network equipment, and hung it out of sight on a closet wall. No desktop space required. Without stretching your mind much, you can see where desktop computing is headed; very small and inexpensive enough to be dedicated to specific tasks. Think about this and then consider the Internet of Things concept. It’s very exciting.
More RTK on Mobile Devices
Later this week I’ll be experimenting with RTK on mobile devices with the CRTN (California Real Time Network), a collection of 330 RTK bases located throughout California. I’ll be using a Panasonic ToughPad running ArcGIS Mobile (and maybe ArcPad) and an iPad using a cloud-based mapping service. The latter is particularly interesting because there are lots of cloud-based GIS data collection apps on the market and under development. Specifically, there’s a lot of subscription-based, cloud-based software. The challenge is that they are even less geodesy-intelligent than the “professional grade” GIS data collection software on the market. In other words, they read coordinates (NMEA format) from GNSS receivers and feed them directly into their app. No datum transformations are provided, neither horizontal nor vertical. That’s going to be a problem.
FCC Levies Record Fine Against Chinese Supplier of GPS and Mobile Phone Jammers
The Federal Communications Commission (FCC) announced that it plans to issue the largest fine in its history against C.T.S. Technology Co., Limited, a Chinese electronics manufacturer and online retailer, for allegedly marketing 285 models of signal jamming devices to U.S. consumers for more than two years. The FCC plans to levy a $34.9 million fine against CTS. The FCC reported that CTS sold 10 high-powered signal jammers to undercover FCC personnel.
The FCC is asking people to report the sale or use of an illegal jammer by contacting the FCC Enforcement Bureau through the FCC online complaint portal, or by calling 1-888-CALL-FCC (or 1-888-225-5322). To voluntarily relinquish a signal jammer, e-mail [email protected]. Additional information, including the FCC Consumer Alert on the jamming prohibitions and the FCC Enforcement Advisory to retailers regarding the marketing of illegal signal jammers, is available at www.fcc.gov/jammers.
You can view the FCC enforcement action against C.T.S. here.
Satellite Launch Pads are Warming Up
Two GPS Block IIF satellites, one launched in February and one launched in May, were set healthy in the past three weeks, making a total of six IIF GPS satellites in orbit broadcasting on three civil frequencies; L1, L2C, L5.
On July 31, the seventh GPS IIF satellite is scheduled for launch, followed by an October 2014 scheduled launch of the eighth GPS IIF satellite.
On June 14, Russia launched a GLONASS-M satellite. It has not been set healthy yet. There are a total of 24 healthy GLONASS satellites in orbit. You can check the current status of GLONASS satellites here.
On August 22, Europe is scheduled to launch the first two Galileo FOC (Full Operational Capability) satellites to add to the four test satellites in orbit that will be integrated into the final operational constellation. A second pair of Galileo satellites is scheduled for launch in November 2014. These are projected dates and subject to slippage.
Galileo Satellites in the Clean Room
Live Webinar from the Esri International User Conference on July 17
In a GPS World first, we’ll be producing a live Webinar from the Esri International User Conference next month on Thursday, July 17 @ 10 am Pacific Time in the exhibit hall at the San Diego Convention Center. Of course, the webinar will be focus on one of the hottest topics, high-precision GNSS on mobile devices; from iPads to Android tablets to smartphones.
Tune in or join us live from the exhibit hall floor! Register here.
A single GLONASS-M satellite was launched from the Plesetsk Cosmodrome on Saturday, June 14, at 17:16 UTC. The satellite, GLONASS-M 55 (with designation 755 once operational and also known as Kosmos 2500), was inserted into the GLONASS constellation’s Plane 3 and will occupy orbital slot 21, according to ISS Reshetnev, the manufacturer of the satellite.
Reshetnev also reported that the satellite is equipped with an experimental payload capable of transmitting signals in the L3 frequency band. The L3 signal, centred at 1202.025 MHz , is CDMA unlike the GLONASS legacy FDMA signals. The experiment will include flight testing of the new equipment and evaluation of its accuracy characteristics. The GLONASS-K1 test satellite also transmits an L3 signal.
A video of the launch can be viewed on the Zvezda (meaning “Star”) TV network run by the Russian Ministry of Defence.