u-blox, the Swiss positioning and wireless module and chip company, announces an all-in-one satellite positioning receiver module, the LEA-6N. The low-power, cost-effective module delivers fast, high-accuracy positioning, u-blox said. It is targeted at industrial telematics applications in Russia such as vehicle tracking, mobile resource management and the ERA-GLONASS emergency call system.
The module works with GPS, Russian GLONASS, and Japanese QZSS satellite positioning systems. It also supports all civilian Satellite-Based Augmentation Systems (SBAS).
“The LEA-6N module delivers clear new benefits for our industrial customers in terms of global support of all available satellite positioning systems, easy to mount LCC form factor, low power consumption and cost effectiveness” said Thomas Nigg, VP Product Marketing at u-blox, “LEA-6N will also support our CellLocateTM hybrid indoor positioning system; when used together with our wireless modules, the location of valuable assets or people can be determined anywhere, indoors and outside.”
Samples of LEA-6N are available mid-April 2012, with evaluation kit EVK-6N and mass production in June 2012. For more information, contact the u-blox office nearest you, or visit with company representatives at Machine to Machine 2012 stand E21 April 3-5 in Paris.
At the Mobile World Congress in Barcelona, Spain a few weeks ago, a company called Loctronix introduced meter-level indoor positioning technology. “In 50 meters, turn left to find Macy’s Department store” is not very far in our future. This technology and others one step closer to making accurate indoor navigation possible so you can navigate from store-to-store inside a shopping mall or even navigate to particular items within a particular store.
It’s all about sensor fusion. CSR’s SiRFstar V/SiRFusion technology uses data from all available satellite navigation systems from the U.S., Europe, Russia, China and Japan, as well as WiFi, cellular systems, accelerometers, gyros, and compasses. Loctronix calls their technology Doppler Aided Inertial Navigation (DAIN) and Spectral Compression Positioning (SCP) which allows them to obtain one meter positioning outdoors, indoors, and even underground without relying on external servers with the following features:
Client-based, sensor fusion software platform producing real-time position, speed, direction of motion, and heading information.
Optional integrated GPS/GNSS signal and navigation processing – using Loctronix’ SCP hybrid technology.
Fully integrated map-matching functionality with support for third-party map data.
Optional WiFi RSSI location and access point profiling.
Third-party LBS API support.
Multiple implementation options supporting existing smartphones and next-generation wireless devices.
Think about what would happen if indoor positioning is actually implemented per the above, able to deliver one meter accuracy. Less than ten years ago, the automobile Personal Navigation Device (PND) market was in its infancy. GPS positioning was clearly able to deliver the accuracy required for point-to-point street navigation. What makes the PND valuable is the outdoor map database. These are the highly detailed digital maps from Navteq/Nokia and TeleAtlas/TomTom that are inside 90% of the PNDs in the world. Drawing from this experience, it’s obvious that indoor mapping databases are going to be huge, not only the location of stores, but the location of items on the shelves within stores. A friend of mine works for a large national retail chain in the U.S. He said they’ve tried aisle-to-aisle navigation technology before, and it failed. It was too difficult for the shopper to use. What that tells me is that the demand is there, in a big way.
The PND market in the 1990s was messing around too, trying to arrive at a technology and price point for mass adoption. Indoor navigation is on the same path, only this time it won’t be Navteq/Nokia and TeleAtlas/TomTom leading the pack.
GPS as a national asset will be highlighted at the 11th GPS Partnership Council, set for May 1 and 2 at the Space and Missile Systems Center at the Los Angeles Air Force Base, in El Segundo, California. The theme of the council is “Our National Asset At Work.” Registration is now open; attendance is limited to 250.
According to the council, “The GPS Partnership Council serves as a means to communicate with GPS stakeholders on present-day activities, future plans, and measures that are in place to ensure GPS remains the world leader for providing space-based positioning, navigation, and timing services to the warfighter and civilian users. Our commitment to mission assurance ensures users around the globe will continue to benefit from improved GPS performance, while we continue acquiring, operating and sustaining GPS as the ‘gold standard’ for positioning, navigation and timing for the warfighter, the nation, and the world.”
Key council members include:
Brig Gen Martin Whelan, director of Requirements, HQ AFSPC/A5
Col Bernie Gruber, director of the Global Positioning Systems Directorate
Anthony Russo, director for National Coordination Office for Space-Based PNT.
The meeting is sponsored by the Los Angeles Chapter of the Armed Forces Communication and Electronics Association and GPS Directorate.
Day 1, Tuesday, covers two topics, “The Enterprise” — a GPS system capability review, and a discussion of “Modernized GPS User Equipment (MGUE),” with an Army future perspective and an MGUE industry panel.
Day 2, Wednesday, covers “GPS at Work for the Nation” in the morning, including GPS’ role for the Department of Homeland Security, the Federal Aviation Administration, NASA, and other agencies. The afternoon of Day 2 looks at “The Warfighter,” with speakers from 2SOPS followed by a panel discussion.
Both days feature opportunities for networking. The final day, Thursday, features the GPS Scramble Golf Tournament.
Attendees can also browse the displays and exhibits during the conference.
allows users to record, export, and import routes and landmarks together with information such as photos, videos, audios, or text directly to an iPhone. The product is intended both for professional survey teams and outdoor adventurers. Key features include:
Enjoy recording your trip routes and pinning impressive landmarks, with multimedia files and descriptions.
Advanced functions; export/import, geotag/geocode, along with Multiple Recording Filters.
Versatilely edit the saved track/point; crop, move, copy, merge, or change properties.
Share and develop your trips with friends easily via iTunes or email.
Available in two versions: The Basic (TMX) and The In-App (TMX, GPX, MID/MIF, or Shapefiles.)
Accord Technology LLC was recently authorized TSO-C145c for its latest receiver/sensor in the NextNav product family, the NextNav MAX GPS WAAS Class Beta-1, -2, -3. This successful GPS development is a key solution in a series of Accord Technology’s affordable civil aviation GPS receivers and sensor, the company said.
Available as circuit card receivers (CCA) for avionics OEM hosting or as line replaceable sensor units (LRU) for aircraft installations, MAX is affordable and meets the latest standards, worldwide. It supports ADS-B (Automatic Dependent Surveillance-broadcast), all normal GPS procedures, as well as precision approach requirements such as LPV (Localizer Performance with Vertical Guidance) and RNP AR (Required Navigation Performance with Authorization Required).
The NextNav MAX GPS technology is the most advanced in the world and is compatible with Satellite Based Augmentation System (SBAS) solutions such as the United States’ WAAS, the European EGNOS, Japan’s MTSAT, and GAGAN in India.
“This TSO authorization for the NextNav MAX gives us greater flexibility to serve our customers with WAAS Beta 1 Only or Beta 1, 2, 3 LRU’s and CCA’s to fit their need,” commented Hal Adams, chief operating officer for Accord Technology. “The NextNav MAX is another important first for Accord Technology and we are anxious to move forward now with our AC 20-165 approved GPS sensor,” added Adams.
Accord Technology received TSO-C145c for its NextNav mini in 2010. The NexNav mini GPS technology was the first GPS WAAS sensor to be authorized by the Federal Aviation Administration TSO-C145c WAAS Class Beta-1 Only. The NexNav mini solution is a market-breaking hybrid of automotive technology and aviation requirements providing an affordable solution for ADS-B GPS source.
NextNav MAX’s DO-229D compliant aerospace GPS-SBAS receiver is certified by the FAA for TSO-C145c Class Beta-3 operation and is the enabling technology for several key applications, including:
Primary means of navigation
Localizer Precision with Vertical guidance approaches (LPV)
Airborne spacing assurance
Airborne Collision Avoidance (Non-TCAS System)
Constant descent approaches
Surface area movement management
Current and advanced Terrain Avoidance Warning System (TAWS)
“Whether it’s a need for LP/LPV approach precision or highly reliable PVT, NextNav MAX offers standard and custom solutions according to what our customers need,” Adams said. Designed around a small form-factor, the NextNav MAX CCA is delivered ready to integrate into host avionics systems, an LRU sensor or as a standalone module to ARINC 743 requirements. “We can even package the CCA in a module, tailored to your application,” Adams said.
The recent broadcast of the first CDMA signal from the new GLONASS-K satellite culminates a long series of events that began in 1989. A key participant gives a first-hand account of the history of many meetings, formal and informal, that created true interoperability between the two major satellite systems, giving users a modern GNSS in action.
October 18, 1989, the Queen Elizabeth Auditorium in London, around 8:30 am. Unknown to me, two 60-minute periods were about to imprint themselves indelibly on my memory.
I walked up the stairs to the exhibition booth of my company, Ashtech, at The Royal Institute of Navigation conference. My good friend, the late Ann Beatty, met me and asked, “Any news from home?”
I thought it was just a casual customary question, and replied: “Thanks, all OK.” She had a strange look on her face. She continued: “Are all your family really OK?” I replied again: “Thanks, all good.” She then realized that I had no clue about the cataclysmic event that had hit the San Francisco Bay area. She abruptly said, “Don’t you know? The big one came! The big earthquake hit San Francisco!”
Californians know the rumors that when The Big One comes, Nevada will have ocean frontage. Now she was telling me that The Big One came! I rushed to the phone, and the recorded AT&T message said, “All lines to your area are out of service.” It took me another hour to find out that this was not yet The Big One, and that my family was safe. I will never forget these 60 minutes of my life. Never!
Nor will I ever forget the events of the next 60 minutes.
After the stress had settled a bit, a delegation from the Russian Space Agency visited our booth. First they expressed their sympathy regarding the earthquake. Then we discussed GPS technology and its similarities with GLONASS. Both systems were fairly new then, although GPS had started first, with a Block I launch in 1978, followed by GLONASS with a launch in 1982. At the time we met in London, GPS was flying 12 satellites, and GLONASS also had 12 in orbit.
The Russian delegation visited all GPS manufacturers’ booths in the exhibition hall and then gathered in the coffee area for their private discussions. A few hours before the conference closed, they returned to our booth and said, “We want to combine GPS and GLONASS, and you are our first choice.” Simply put, I was fascinated and excited.
After working out visa and travel details, four months later I arrived in Moscow in the cold days of February 1990. It was still the Soviet Union.
I had grown up in Iran where the U.S.S.R. was our neighbor to the north. Remembering the global political landscape of my childhood days, I felt both fascination and fear as my airplane landed at Moscow airport.
Upon meeting the people who greeted me at the airport, my fears disappeared, and my fascination grew stronger.
Our first formal meeting took place in the Institute of Space Device Engineering (ISDE), a division of the Russian Space Agency that was responsible for the GLONASS program. The opening photo shows me with the late Dr. Nikolay Yemelianovich Ivanov, director of the GLONASS program, at that first meeting.
I want to focus a bit on the GLONASS team and applaud them for their efforts. What makes the GLONASS team special is that they worked under much harder political and financial conditions than the GPS or Galileo teams. But still they were able to make the project successful. The Soviet Union and later Russia went through huge political, economic, social, and geographical revolutions, but the GLONASS team managed to keep the satellite navigation program alive and successful.
Galileo’s management, while enjoying much more stability and financial luxury, can certainly appreciate and understand the significance of what the GLONASS team accomplished. Galileo also benefitted from the European integration of 27 countries, while the Soviet Union disintegrated into 15 separate nations.
Despite all their heroic work, individuals on the GLONASS team have received almost no international recognition. At home they went unnoticed, due to their political situations. For example, the highest international recognition that Dr. Ivanov received was that he became a member of the GPS World Advisory Board, which I facilitated. In this article, I want to salute some members that I know and at least keep their names and photos recorded in the GPS World archives.
In the first meeting, everyone recognized and emphasized the great potential of combining GPS and GLONASS for a variety of applications. I became more assured of the deep desires of my hosts to make this happen. They had prepared detailed charts and plans, especially for high-precision applications. They also gave me the GLONASS Interface Control Document (ICD) for the first time.
We signed a cooperation protocol and agreed to explore technical details in our next meeting, which occurred a few months later. There I began to know Dr. Stanislav “Stas” Ulianovich Sila-Navitsky, at that time the chief scientist of Dr. Ivanov’s team. Later he became my vice president in three companies that I founded. He also became my best friend of 19 years, before he passed away on May 7, 2010.
We had several meetings in Moscow and one in Paris in the headquarters of our partner SAGEM.
I have wonderful memories of all the meetings. One meeting in Paris included General Leonid Ivanovich Gusev, the head of ISDE. One evening Stas called my hotel room and asked me to cancel our dinner at a famous French restaurant and instead join them for a “real dinner.” Apparently General Gusev was tired of French food! The real dinner took place in the General’s hotel room, and the menu consisted of dark Russian bread, Russian kielbasa sausage, Russian seledka herring, and an abundance of Russian vodka.
Our first announcement of combining GPS and GLONASS was published in GPS World magazine, in only its second issue, March/April 1990. That year we had a poster banner in our Institute of Navigation exhibition, showing the American flag and the Soviet flag (hammer and sickle) next to each other. My very good friend, Colonel Gaylord Green, the second director of the GPS Joint Program Office, refused to have his picture taken with me in front of that banner. Instead, we stood over to another side of the booth for his photo.
A few months after the Paris meeting, the political process known as perestroika began and caused the Soviet Union to end. Life became extremely difficult for Russians.
I called Stas to discuss the situation. We concluded that we had no choice but to continue the plan on our own if we wanted to combine GPS and GLONASS. I went back to Moscow several times, and in February 1992 officially opened the Moscow office of Ashtech. This office is still operational in Moscow with about 10 percent of the original team. It is now in the process of being purchased by Trimble Navigation. What a turn of events!
In 1996 we introduced the first combined GPS and GLONASS receiver; the product announcement appeared in GPS World, July 1996
Back home in the United States, the situation was different. Supporting GLONASS was an unpatriotic act. The most prominent figures of GPS teased me for wasting my time with GLONASS. The news favored their arguments: the Russian economy was going downhill. In September 1998, the Russian ruble collapsed more than 300 percent within a week. Banks closed. Even Coca Cola was not able to pay its employees in Russia because of bank closures. Many western companies left Russia. During that period, I intentionally stayed longer times in Moscow and managed to pay our employees without a day of delay. Furthermore, a more than three-fold rate change in favor of the dollar made our employees relatively rich, because their salaries were based on the U.S. dollar.
I remained confident that GLONASS would succeed because I had seen the enthusiasm and dedication of GLONASS management and engineers.
My Ashtech partners wanted to take the company public to recoup their investments. They thought Wall Street would negatively view GLONASS and the Russian connection. So my aspiration did not match theirs, and I started Javad Positioning System (JPS) in 1996. About 90 percent of the staff engineers followed me to JPS.
One of John Scully’s vice presidents did to Ashtech what Scully did to Apple. Meanwhile JPS became very successful, as Apple did when Steve Jobs returned.
Subsequent to another event and termination of some obligations and commitments, I started JAVAD GNSS in June 2007. Almost all of the key people followed me again. Our current team has a history of working together for close to 20 years.
In JAVAD GNSS we raised the bar of GPS/GLONASS integration to a higher level and focused in two new directions. The first was to eliminate the problem of GLONASS inter-channel biases, which is inherent to the GLONASS frequency-division multiple access (FDMA) signal structure. The second was to support the opinion of GLONASS engineers who were pushing for a new code-division multiple access (CDMA) signal for GLONASS, similar to the GPS signal.
We resolved the GLONASS inter-channel biases issue around 2009 and announced, “Our GLONASS is as good as GPS.”
On the second front, we worked with the top managements of ISDE and the Information Analysis Center (IAC) of the Russian Space Center to demonstrate the advantages of CDMA for high-precision applications.
Some years ago, Stas had confided in me that the issue of CDMA was nothing new, and had been extensively deliberated at all levels of various GLONASS organizations during the early design phase of the system. The result of all these discussions was that engineers and technical people favored CDMA, but the higher management, mostly influenced by the military organizations, held out for FDMA. The reason for favoring FDMA is still a secret, though some believe that they just wanted to be different from GPS and did not see much advantage in CDMA. Some also believed FDMA gave better jamming protection.
Of course in those very early days, no one imagined using GPS or GLONASS for high-precision applications, and as such truly there was not much difference between CDMA and FDMA. Much later, the notion of using carrier phase of GPS and GLONASS signals for high-precision applications was discovered, and then the advantages of CDMA became relevant, as Dr. Ivanov also hinted in our first meeting.
After we combined GPS and GLONASS, and as a lot of our worldwide users began comparing the two systems, the issue of CDMA versus FDMA again came up for discussion among the GLONASS authorities.
More recently, since 2007, we had several meetings in the offices of ISDE in Moscow, in IAC in Korolev (the Russian Space City), and several in our JAVAD GNSS office in Moscow. Most importantly, we had several meetings in my Moscow apartment, enhanced by Russian vodka and the best Armenian cognac, courtesy of Sergey Revnivykh, head of IAC. All meetings were open and candid, discussing and demonstrating the advantages of CDMA, in support of the ISDE engineers who were reluctant to express their opinion above certain levels.
I also met with the head of the Russian Space Agency, Dr. Anatoly Nikolayevich Perminov, who personally supported and sponsored me in obtaining an extended Russian residency visa. Let me also express my appreciation for receiving the Medal of Honor from the Russian Cosmonauts Federation, along with the official astronaut watch. I don’t understand the reason for receiving a Kalashnikov AK-47 semi-automatic rifle from ISDE for my birthday. I wonder how I can transport it home!
General Anatoly Shilov (deputy director of the Russian Space Center), Dr. Vicheslav Dvorkin (GLONASS deputy general designer), Sergey Revnivykh, Viktor Kosenko (first deputy of chief GLONASS designer) and Sergey Karutin (GLONASS senior scientist) are the new generation of GLONASS leaders who deserve credit for supporting CDMA on GLONASS. Recently, a new GLONASS-K sat-ellite was launched, transmitting an experimental CDMA signal in addition to the legacy signals. Almost immediately, we announced tracking of the new GLONASS-K satellite and its new L3 signal details, hours after it started transmitting. See GPS World archives and our website for details of this signal which seems, in all aspects, as good as GPS.
Another new issue of significant international concern was a new frequency for GLONASS. This issue was more political than technical, and is discussed under the umbrella of interoperability.
In the early days of my frequent travels to Russia, the KGB probably suspected that I was a CIA agent — and the CIA probably suspected that I was a KGB agent! I would not be surprised if both the CIA and KGB monitored every bit of my travels and activities. After some years, the San Francisco airport authorities stopped interrogating me for my activities in Russia any time I came back home. Perhaps because of their deep investigations, I earned the trust and friendship of both sides, and their confidence that I had nothing in mind other than helping to integrate GPS and GLONASS. I was an unofficial member and friend of both U.S. and Russian delegations during the so-called interoperability discussions since 2007, which sometimes touched on the CDMA issue as well.
Some of the most fruitful and friendly discussions between the U.S. and Russian delegations occurred in my apartment in Moscow, after their official meetings. Ken Hodgkins of U.S. State Department; Mike Shaw, director of the National Space-Based Positioning, Navigation, and Timing Coordination Office; David Turner, director of the Center for Space Policy & Strategy; Scott Feairheller of the U.S. Air Force; and Tom Stansell, consultant to the GPS Wing were some of my honored guests.
The new GLONASS frequency discussions are still in progress, and I am proud to host and support both sides the best that I can. Sometimes it is fun to observe that discussions resemble poker games where hands are known to all sides, but players still try to bluff each other! Let’s leave it at that for now.
In May of this year, I had a conversation with General Anatoly Shilov, now second-in-command of the Russian Space Agency, reporting to the first deputy of the minister of defense, General Vladimir Popovkin, who recently replaced Dr. Perminov as head of the Russian Space Center. This is an indication of increased attention and support from the Russian government to its GLONASS program. In our conversation, General Shilov was enthusiastic and optimistic that the GLONASS program will move forward faster.
GLONASS has proven to be a real and reliable complement to GPS. If it were not for the failure of the launch of three GLONASS satellites in December 2010, its constellation would be complete and fully, globally operational today. It will happen soon. Sergey Revnivykh estimates that currently the system has 99.8 percent global coverage.
Today, a truly reliable and fast RTK is not possible without combining GPS and GLONASS satellites.
The most recent testimony to the success of GLONASS comes from the long-time GLONASS opponents who once criticized me for supporting the system. Recently they had to pay a lot of money to acquire the first company that I founded in Moscow, which they believed would never survive.
This year at JAVAD GNSS, I and most of my original employees and GLONASS designers are celebrating our 20th year in Russia, and we are working harder to make the integration of GPS and GLONASS even better.
On May 7, 2010, Stas lost to leukemia. He was not present to witness the successful introduction of our TRIUMPH-VS receivers. My refrigerators in Moscow are full of medicines that he brought for me any time I had a little cold. I miss him a lot, and our team is dedicated to following the path that Stas loved so much.
I want to briefly summarize the current status and the future of GPS and GLONASS from the users’ point of view.
GLONASS now has 24 satellites transmitting FDMA signals in two frequency bands. The failure in the last launch to deploy three more satellites delayed completion of the constellation to the end of 2011. The good thing about GLONASS is that both of its L1 and L2 signals are not encrypted and give better data than GPS P1 and P2 that are encrypted.
GLONASS is considering a plan to add CDMA signals to all satellites and not suffer from inter-channel biases. But it will take about 10 years for this plan to become complete for public use, even if the plan is approved and followed. At JAVAD GNSS, we have already mitigated the effect of GLONASS inter-channel biases to the accuracy of better than 0.2 millimeters. We made GLONASS FDMA the same as GPS CDMA by adding some innovations (patent pending) and enhanced algorithms.
The GPS plan is to add a third frequency signal (called L5) and add an unencrypted signal in L2. But it will take several years to have enough new satellites transmitting these new signals to make them usable for daily work.
In the near term, we have two complete systems, consisting of about 30 GPS and 27 GLONASS satellites. The current non-encrypted GLONASS signals give it an edge over the current GPS encrypted signals, given the fact that we have mitigated the GLONASS FDMA inter-channel biases.
GLONASS is also enhancing its control segment to better monitor GLONASS satellites and improve the system’s clock and orbit parameters. Most of these errors are cancelled in differential and high-precision applications anyway.
Existence of two complete and free systems, GPS and GLONASS, will place some doubt on the future of Galileo, as it will be extremely difficult for Galileo to hope to collect money from users to fund itself. The addition of Galileo, as a third system, will not really add much benefit for users anyway. The only push for deploying Galileo must come from some European military organizations to support their specific interest.
I have been extremely fortunate also to have had the opportunity to work on GPS from its early days, co-pioneering high-precision applications at Trimble Navigation. I owe a lot to Charlie Trimble, who helped me to lift myself up when I sought refuge in the United States in 1981. He taught me GPS as well as dedication in business. I also benefitted from Sunday meetings with Dr. Bradford Parkinson, the first program director of GPS, who was and still is a board member of Trimble Navigation. I am curious to find out how Brad, as a board member, voted in the recent matter of the purchase of Ashtech. Since leaving Trimble, my innovative products at Ashtech, JPS, and JAVAD GNSS have been well documented through the years in GPS World.
My emphasis on GLONASS in this memoir is only to record some histories and recognize GLONASS and some of its pioneers who were often overlooked. GPS is already a well-known, well-established system and is the backbone of GNSS.
As a final note, let me add that our current JAVAD GNSS products have the option of tracking all current and future signals of GPS, GLONASS, QZSS, and Galileo. Yes, Galileo too!
Early morning on February 2, 2011, I went to work in my job as a road surveyor in the Bungoma District of Kenya. Here, land disputes are common, though the government is trying to reduce the conflicts by issuing land titles and certificates.
I carried with me a small handheld GPS, the Magellan Explorist 100. While I was using it, a stout man in early fifties approached me and introduced himself as a surveyor, too. He was very interested in the way I was walking around with the “gadget,” trying to locate a control point. He asked me how the gadget worked. I explained it to him, showing him how its easy to use in general boundary surveys. He was satisfied, and we exchanged contacts and parted.
A month later, he called me for help. When I asked him what was wrong, he told me there were a group of land owners, or members, who were about to kill each other in a dispute over a 128-acre farm they had bought. These members had each contributed money to buy a single parcel with the intention of subdividing it fairly. They were engaged in a disagreement about the boundaries and the subdivision of the farm. The gentleman asked me if I could take a survey of the farm sometime in the next few days. Concerned about the conflict, I answered, “Yes, in hours not days.” Still, it wasn’t until two days later that he could assemble the members of the disputed farm and called me to mark the boundaries for them.
I arrived at the farm with my Magellan GPS and my laptop. To my dismay, I found that some of the members were armed with crude weapons, ready to fight each other. I asked them to be peaceful and wait for just a few hours while I surveyed the site.
I started picking the boundary corners of the farm all around the permiter. I was through with that task in less than 35 minutes. This parcel of land was to be divided into 18 pieces. I uploaded the data manually to my laptop, then I did the subdivision using AutoCAD Land Development 2000.
After two hours and fifteen minutes, I called the members and told them to ready themselves to be shown the boundaries of their property.
I walked around the property with them, guided by my handheld GPS, to each boundary beacon. After one and a half hours, the warring members were shaking hands and laughing, saying “So, it was that easy!”
The dispute had ended, and was solved peacefully. My small Magellan Explorist 100 acted as a peace mediator.
Noah Kertich is a surveyor with H Young Construction EA Ltd., which is under contract with the World Bank in conjunction with the government of Kenya. Kertich graduated from the Kenya Institute of Surveying and Mapping in 2004 and received a diploma in photogrammetry and GIS from Icaros Geosystems, Israel, in 2008.
Multiple Constellation Processing in the International GNSS Service
By Tim Springer and Rolf Dach
Does combining GPS and GLONASS observations make a difference? The International GNSS Service (IGS) has been providing such data for several years. Representatives from two IGS analysis centers discuss the past, present, and future of IGS GNSS monitoring and product development.
INNOVATION INSIGHTS by Richard Langley
ARE WE THERE YET — at a multiple-constellation GNSS world? The European Galileo system only has two test satellites in orbit, with constellation completion not scheduled until 2014. The Chinese Beidou/Compass system has launched some test satellites, but global coverage is not promised until 2020. And the first Japanese Quasi-Zenith Satellite System space vehicle is scheduled for launch this year with the system not fully operational until 2013. So, does this mean GPS is still the only game in town? No, not by a long shot. We have overlooked Russia’s GLONASS.
Standing for Global’naya Navigatsionnaya Sputnikova Sistema, GLONASS was conceived by the former Soviet Ministry of Defence in the 1970s, perhaps as a response to the announced development of GPS. The first satellite was launched on October 12, 1982. But because of launch failures and the characteristically brief lives of the satellites, a further 70 satellites were launched before a fully populated constellation of 24 functioning satellites was achieved in early 1996. Unfortunately, the full constellation was short-lived. Russia’s economic difficulties following the dismantling of the Soviet Union hurt GLONASS. Funds were not available, and by 2002 the constellation had dropped to as few as seven satellites, with only six available during maintenance operations! But Russia’s fortunes turned around, and with support from the Russian hierarchy, GLONASS was reborn. Longer-lived satellites were launched, as many as six per year, and slowly but surely the constellation has grown to 21, with two in-orbit spares.
But are there any users outside Russia? Although dual-system GPS/GLONASS receivers have been around for at least a decade, manufacturers have taken notice of GLONASS’s recent phoenix-like rebirth. All of the high-end manufacturers now offer receivers with GLONASS capability. Does combining GPS and GLONASS observations make a difference? You bet — just ask any surveyor who uses both systems in the real-time kinematic (RTK) approach. Scientific applications requiring high-accuracy satellite orbit and clock data also benefit. The International GNSS Service (IGS) has been providing such data for several years, and in this month’s article representatives from two IGS analysis centers discuss the past, present, and future of IGS GNSS monitoring and product development.
So, getting back to our question, are we there yet? Many early adopters of GPS plus GLONASS data and products would reply with a resounding “yes.”
“Innovation” features discussions about advances in GPS technology, its applications, and the fundamentals of GPS positioning. The column is coordinated by Richard Langley, Department of Geodesy and Geomatics Engineering, University of New Brunswick.
In 2005, the International GPS Service (IGS) was renamed the International GNSS Service. With this change, the IGS governing board and the IGS community expressed their expectation to extend activities from the well-established GPS to other active and planned global navigation satellite systems such as GLONASS, Galileo, and Compass. Meanwhile, the GLONASS satellite constellation, as well as the IGS GNSS tracking network, have evolved significantly. Since 2003, the GLONASS satellite constellation has been improving steadily, leading to the current, May 2010, constellation with 21 operational satellites and two in-orbit spares. And starting in 2008, the GNSS capabilities of the IGS tracking network have been greatly enhanced giving rise to a truly global GNSS tracking system with more than 100 GNSS (GPS plus GLONASS) receivers. The almost-complete GLONASS satellite constellation, coupled with a readily available global tracking network with high-quality receivers, have greatly increased the interest in and need for GNSS products such as precise satellite orbit ephemerides. However, the IGS analysis center products are still mainly GPS-only. Only two analysis centers provide true multi-GNSS solutions. Two analysis centers provide GLONASS-only solutions (a GLONASS combined IGS product is available but without accurate clocks). No combined IGS GNSS product exists. In view of the large interest from the user community, this is a really disappointing situation. In particular, because experiences gathered with handling GPS plus GLONASS will make the incorporation of other GNSS such as Galileo, Compass, and the Quasi-Zenith Satellite System (QZSS) that much easier.
However, during a meeting of the IGS analysis centers in December 2009, it became clear that many of the centers had started to implement and enhance the GLONASS processing capabilities in their software. This was happening as a direct consequence of the improvements in the GLONASS constellation, the IGS GNSS tracking network, and increased user interest (if not demand). Throughout 2010 and 2011, we will therefore see a significant increase in the number of true GNSS solutions within the IGS. A very positive development for the GNSS world.
In this article, we give an overview of the recent developments in the area of multi-GNSS processing within the IGS in general, but with a focus on the activities of the two analysis centers in the IGS that are leading the GNSS efforts: the Center for Orbit Determination in Europe (CODE) and the European Space Operations Center (ESOC) of the European Space Agency.
Why GNSS?
Within the IGS, we are often confronted with the question: Why GNSS? Why should I go through the burden of adding GNSS capabilities to my software, having larger processing loads, and so on, for little or no benefit? Well, from an IGS analysis center point of view, this question is valid. The accuracies achieved with GPS alone are so good that there will be little visible benefit of including another system. Nevertheless, there are indeed benefits.
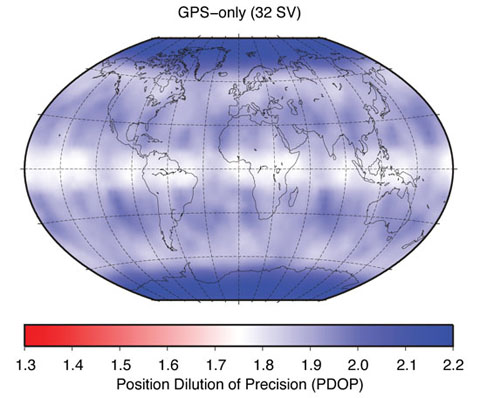
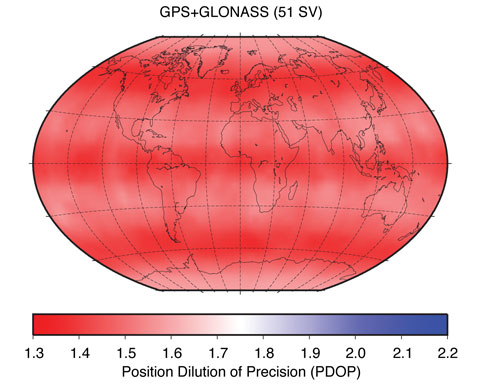
There is a large number of users worldwide who would see benefits of using GNSS products compared to GPS-only products. Clearly, all real-time users will benefit enormously from the increased number of satellites. Figure 1, showing the so-called position dilution of precision (PDOP), demonstrates this very clearly. The two panels in Figure 1 show the GPS-only PDOP and the GPS-plus-GLONASS PDOP using the satellite constellation of May 3, 2009.
FIGURE 1A. Effect of GLONASS on position dilution of precision.FIGURE 1B. Effect of GLONASS on position dilution of precision.
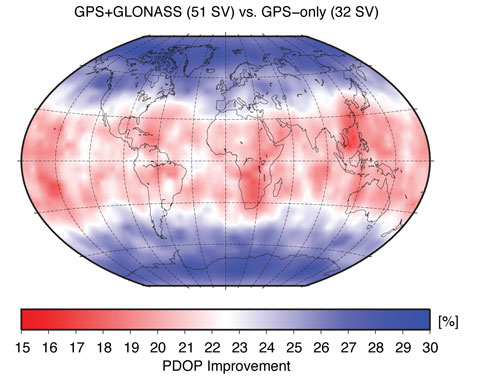
Figure 2 shows the PDOP improvement in percentage when comparing the GPS-only to the GPS-plus-GLONASS PDOP values. At high latitudes, that is, above 55 degrees, the improvement is at the 30 percent level. At mid-latitudes, the improvements are still well above 15 percent, demonstrating the significant improvements real-time GNSS users may expect compared to real-time GPS-only users.
Figure 2. Position dilution of precision improvement using GLONASS.
With the current GPS constellation, daily solutions are not limited by the number of available satellites, but rather by the analysis models (such as that for the troposphere), calibration uncertainties (such as models for antenna phase-center variation), and environmental effects (such as multipath). For these reasons, IGS-like processing strategies, in which data from reference stations are processed in 24-hour batches, will not show clear benefits from adding data from more satellites and other systems.
However, besides real-time users, users at high latitudes (including the whole of Canada and most of Europe) will see improvements. Recently, several researchers have noticed that for latitudes higher than 50 degrees, the addition of GLONASS brings benefit. This is, of course, thanks to the higher orbital inclination of the GLONASS satellites (about 64 degrees) compared to the inclination of the GPS satellites (about 55 degrees), which is also very nicely demonstrated in the PDOP (see Figure 1). So, from a service point of view — the “S” in IGS — there is a clear need to provide GNSS solutions to the user community. Besides offering significant benefits in terms of accuracy, the increased number of satellites will also make solutions more reliable and robust. The completely different repeat cycle of the GLONASS satellite orbits is especially important as it changes the sensitivity to multipath completely. Multipath effects in GPS-only data repeat almost perfectly from day to day with a 4-minute time shift giving rise to spurious, near yearly signals in GPS time series. Satellites from other constellations, such as GLONASS, introduce other system-related frequencies, which results in a general reduction of such GNSS-induced frequencies in a multi-GNSS solution.
Because of the constellation design, each GPS satellite follows its own ground track in each orbit cycle. That means that at a ground station, each GPS satellite is observed on one and the same track each day so that a systematic influence of a satellite (such as a mismodeling of the satellite antenna position with respect to the satellite’s center of mass) has a systematic effect on the obtained (daily) station positions. This systematic translation of satellite-related errors into station-related parameters doesn’t happen for any other GNSS constellation.
IGS GNSS Analysis Centers
A detailed description of the IGS is beyond the scope of this article; an excellent overview was provided in an earlier Innovation column. We simply point out here that it is important to know that the IGS serves as the reference in many GNSS applications by providing data and products of the highest possible quality. Very well known and widely used are the tracking data from the IGS station network — the raw pseudorange and carrier-phase measurements — and the orbit and clock products of the GPS satellites. The IGS generates these products by combining the orbit and clock solutions of the individual analysis centers that contribute to the IGS. For the GPS-only products, 10 different analysis centers contribute to three different product series called the ultra-rapid, rapid, and final products. The final products deliver the highest possible quality but have the longest delay, as they become available 12 days after the end of the observation week. The rapid products are roughly comparable in quality to the IGS final products, but they are delivered daily with a delay of only 17 hours after the end of the observation day. The ultra-rapid products are delivered four times per day 3 hours after the end of the last used observation. For example, at 03:00 UTC, an ultra-rapid product is delivered that used data up to 00:00 UTC. It consists of two parts: an estimated part and a predicted part that may be used for real-time purposes. The quality of the estimated part is very similar to that of the rapid products. The predicted part is, of course, significantly less accurate, although the orbits have an astonishing precision of well below 30 millimeters — much better than that of the orbits in the satellites’ broadcast navigation messages.
In addition to these GPS-only products, there is also a GLONASS product. However, contrary to the GPS side of things, for GLONASS, only a final product is generated. Four analysis centers provide products for the IGS GLONASS combination: the Bundesamt für Kartographie und Geodäsie (BKG), Frankfurt am Main, Germany; CODE, based at the Astronomical Institute of the University of Bern, Switzerland; ESOC, Darmstadt, Germany; and the Information-Analytical Center (IAC) of Roscosmos, Moscow, Russia.
The analysis centers BKG and IAC determine the GLONASS satellite orbits, introducing the information for the GPS satellites from the IGS solution without further estimation. The analysis center CODE provides, since May 2003, orbits for GPS and GLONASS based on a rigorously combined analysis of the data of both GNSS, that is, a true multi-GNSS solution. Since January 2008, ESOC follows this strategy as well. From these four analysis centers, only two, ESOC and IAC, provide satellite clock estimates for the GLONASS satellites. This situation prevents the IGS from making a robust and reliable combined GLONASS clock product. With four analysis centers contributing to the orbits, the IGS can and does make an excellent GLONASS combined orbit product.
In our definition of true multi-GNSS solutions, the measurements from each system contribute to all relevant parameters to the same extent. This can only be achieved by the rigorous combined processing of the data from all available GNSS. The two-step approach, introducing the GPS solution when solving for the GLONASS orbits and satellite clocks, is regarded as an extension of a GPS-only solution to GLONASS. As the contributions from BKG and IAC in the IGS GLONASS product demonstrate, this two-step procedure provides excellent results.
From a user point of view, a big disadvantage is the fact that the IGS does not provide a real GNSS product. The IGS provides a high-quality GPS product and a high-quality GLONASS orbit product, but there is no combined GNSS product. Also, the IGS is only capable of generating final GLONASS products because only two analysis centers, CODE and ESOC, submit GNSS products for the rapid and ultra–rapid products. IGS policy requires contributions from at least three analysis centers for a meaningful and robust combined product.
Users of GNSS orbits and/or clocks therefore have to use the products of one of the individual analysis centers or combine the GPS-only and GLONASS-only products from the IGS. Here, the GNSS products of the CODE and ESOC analysis centers are clearly preferable over those of the IGS and other analysis centers since these are the only two true GNSS products that guarantee the full consistency between the two GNSS.
GLONASS Tracking Network
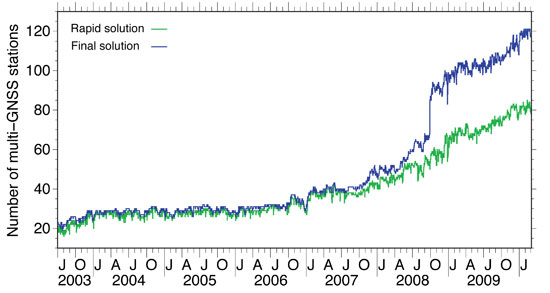
Until 2003, the IGS had established a GLONASS tracking network of merely 20 stations. In 2003, this number grew rapidly from 20 to 30, but after 2003 the number of stations remained stable for quite a long time with a very inhomogeneous distribution. For example, there were only a few stations in the whole western hemisphere. In 2006/2007, a new generation of combined GPS/GLONASS receivers became available, produced by several well–known GPS receiver manufacturers. With this new equipment available, the number of GLONASS tracking stations in the IGS network started to increase steadily. In 2008, the increase rate went up significantly (see Figure 3) and, more importantly, the global distribution of the receivers improved as, finally, significant numbers of stations started to emerge in both North and South America. Orbits and clocks of the GLONASS satellites are, since ear
ly 2009, determined from the data of more than 100 globally well-distributed tracking stations in the IGS network (see Figure 4). A good global distribution of observing sites is extremely important for orbit determination and even more so for the clock determination. Until early in 2008, the GLONASS clock determination suffered from gaps in the global tracking network, which had severe impact on the clock estimates. If tracking gaps cause an interruption of the carrier-phase tracking of a GNSS satellite, the clock estimates are basically reset and a jump will occur. The size of the jump is delimited by the accuracy of the code (pseudorange) observations, that is, at the 1-meter level, or 3 nanoseconds in clock terms.
We may state that today orbit and clock determination for the GLONASS satellites may be based on a truly global tracking network of high-quality geodetic–type receivers. This significant improvement is due to the efforts of many IGS station managers and their institutions.
Figure 3. Number of sites in the IGS network providing GLONASS data, used for orbit determination at CODE.Figure 4. Current distribution of IGS combined GPS and GLONASS tracking stations.
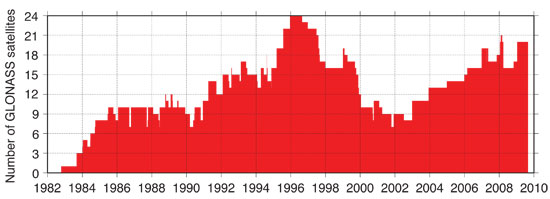
GLONASS Constellation
After reaching a full orbit constellation of 24 satellites in early 1996, the GLONASS constellation degraded rapidly due to Russia’s economic difficulties following the break-up of the Soviet Union coupled with the short lifetime of the GLONASS satellites. Since 2002, the GLONASS constellation has slowly but surely been rebuilt (see Figure 5). Currently, there are 21 active modernized GLONASS (GLONASS-M) satellites, which have a significantly longer lifespan compared to the original satellites. Additionally, there are two reserve satellites on orbit.
Figure 5. Development of the GLONASS satellite constellation since 1982.
Russia intends to have a full 24-satellite constellation in place by the end of 2010. To achieve this goal, two more triple-satellite launches are planned, one in August and one in November. The November launch could include a new type of GLONASS satellite, GLONASS-K. The GLONASS-K version is a lighter, unpressurized spacecraft, with a design lifetime of 10 years. In addition to the legacy frequency-division-multiple-access signals, it will transmit code-division-multiple-access signals and use an additional frequency band overlapping with the GPS L5 band.
Orbit and Clock Accuracy
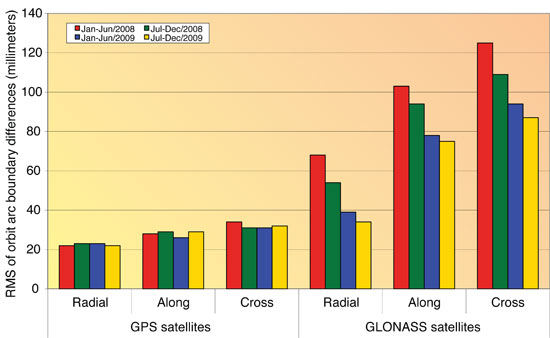
The developments of both the GLONASS tracking capabilities of the IGS station network as well as the steady increase in the number of GLONASS satellites has had a positive influence on the accuracy of the GLONASS orbits and clocks. It also has significantly increased the interest in the GLONASS system. The enhancement of the IGS GNSS tracking network from an almost purely European network to a truly global network between 2008 and now has had a significant impact on the quality of the GLONASS orbits and clocks. To show the effect on the quality of the GLONASS orbit estimates, we look at the difference between two independent consecutive solutions spanning 24 hours from 0 to 24 hours GPS Time. We compare the “midnight point” of both solutions, that is, the solution at the end of one day (or arc) and the beginning of the next day (or arc). This will give us a worst-case estimate for the orbit quality because typically the orbit is less accurate at the boundary of the orbital arc compared to the middle of the orbital arc. We have analyzed these orbit differences for all GPS and GLONASS satellites separately for four half-year time spans using the routine IGS GNSS solutions from ESOC. The differences are computed in three different satellite-orbit-related directions: radial, along-track, and cross-track. The times spans are:
January to June 2008 (6 months)
July to December 2008 (6 months)
January to June 2009 (6 months)
July to December 2009 (6 months)
The results are shown in Figure 6. For the GPS satellites, we cannot see any improvement over time. The quality of the GPS orbits is excellent at the 25- to 35-millimeter level for all three components.
Figure 6. Evolution of GPS and GLONASS orbit quality from January 2008 to December 2009.
Remember, we are looking at the worst-case differences here. For GLONASS, we can see a significant improvement over the four time spans. Early in 2008, the orbit quality was at the 120-millimeter level (cross-track), which has improved significantly to the 85-millimeter level. It is important to note that no processing changes were made during this time interval, and that the improvements are thanks to the improvements in the station tracking network and the GLONASS satellite constellation.
The clock quality is more difficult to assess, but over the timeframe of 2008 to 2009 we have noticed that the clock estimates of the GLONASS satellites have become complete. In 2008, with the still-far-from-global tracking network, there were many gaps in the tracking of the GLONASS satellites. This means that at some epochs no stations were tracking a GLONASS satellite. Such gaps cause jumps in the satellite clock estimates, because the carrier-phase observations become discontinuous, and these jumps are at the 1-meter (3-nanosecond) level. With the improvements of the IGS GNSS tracking network, the GLONASS tracking is now complete and clocks for all epochs are estimated. A comparison of the clocks of the two analysis centers that provide estimated clocks for the GLONASS satellites shows an agreement at the 80-picosecond level, which is only slightly worse than the agreement between the GPS clocks. Significant biases at the few-hundred-nanosecond level exist only in the GLONASS clocks because of receiver internal frequency-dependent delays. The ESOC GNSS orbit and clock products are, however, perfectly suited for precise point positioning using either GPS, GLONASS or, even better, both GNSS simultaneously. It should be noted that since February 2010, the ESOC IGS clock products are now sampled at 30 rather than 300 seconds, which further enhances their suitability.
Conclusions and Outlook
The IGS has promised to become a GNSS service by changing its name in 2005, more than four years ago. Meanwhile, the GLONASS satellite constellation as well as the IGS GNSS tracking network have matured and are practically complete. For the IGS to become a true GNSS service, a substantial number of the analysis centers should provide GNSS contributions to all IGS products: final, rapid, ultra-rapid, and real-time. These products should come from performing a rigorous combined analysis of the observations of all active GNSS satellites. It is expected that over the next two years, we will see a significant increase in the number of true GNSS solutions within the IGS, a very positive development for the GNSS world.
Within the IGS, the analysis centers CODE and ESOC are leading the GNSS efforts. CODE has provided fully consistent GPS/GLONASS products from a rigorously combined processing approach for all IGS products (final, rapid, and ultra-rapid) since May 2003, or for seven years. Since the beginning of 2008, ESOC has followed this good practice for its final products, and in February 2010 ESOC started to produce rapid and ultra-rapid GNSS products. A unique feature of the ESOC products is that they include the clocks for the GLONASS satellites, even with a sampling rate of 30 seconds for the final products. CODE will add GLONASS clocks to its IGS products very soon, during the fi
rst half of 2010. The GLONASS orbit and clock product quality has become comparable to that of the GPS products within the IGS. However, because GLONASS carrier-phase integer ambiguity resolution is difficult, the GLONASS products are and will remain somewhat less accurate than the GPS products.
The experiences gathered at CODE and ESOC by fully combining the observations from the GPS and GLONASS systems will pave the way for the integration of additional systems and signals within the IGS. Hence, IGS will retain its leading position in providing the reference, in the broadest sense of the word, for all GNSS. In the near future, this means the integration of QZSS and Galileo observations as well as the integration of the new triple-frequency signals from the latest generation of GPS satellites, Block IIF, the first of which was scheduled for launch last month.
The positive GNSS developments within the IGS will require an update of the IGS combination software to enable a true GNSS combination. The CODE and ESOC analysis centers have indicated that they are interested in taking on this important task of rewriting and enhancing the IGS orbit and clock combination software to make the IGS a true GNSS service.
Acknowledgments
CODE is a collaboration among the Astronomical Institute, University of Bern (Bern, Switzerland), the Swiss Federal Office for Topography (Wabern, Switzerland), the Bundesamt für Kartographie und Geodäsie (Frankfurt am Main, Germany), and the Institut für Astronomische und Physikalische Geodäsie of the Technische Universität München (Munich, Germany).
The authors are very grateful to the IGS and its numerous contributors for providing the global GNSS tracking data network.
TIM SPRINGER received his Ph.D. in physics from the Astronomical Institute of the University of Bern (AIUB) in 1999. He has been a key person in the development of the Center for Orbit Determination in Europe (CODE), one of the IGS analysis centers, located at AIUB. Since 2004, he has been working for the Navigation Support Office (OPS-GN) at the European Space Operations Centre (ESOC) of the European Space Agency (ESA) in Darmstadt, Germany. In this group, he has led the development of the new ESOC GNSS software, which is used for most GNSS activities at OPS-GN, including GIOVE-A and -B analyses.
ROLF DACH received his Ph.D. in geodesy at the Institut für Planetare Geodäsie of the University of Technology in Dresden, Germany. Since 1999, he has been working as a scientist at AIUB, where he is head of the GNSS research group. He oversees the development of the Bernese GPS Software, used at CODE for activities in the frame of the AIUB IGS analysis center and elsewhere.
“Renovated GLONASS: Improved Performances of GNSS Receivers” by A.E. Zinoviev, A.V. Veitsel, and D.A. Dolgin in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 3271–3277.
“Other Satellite Navigation Systems” by S. Feairheller and R. Clark, Chapter 11 in Understanding GPS: Principles and Applications, 2nd edition, edited by E.D. Kaplan and C.J. Hegarty, published by Artech House, Boston, 2006.
“GLONASS Performance, 1995–1997, and GPS-GLONASS Interoperability Issues” by G.L. Cook in Navigation, Vol. 44, No. 3, Fall 1997, pp. 291–300.
“GLONASS Review and Update” by R.B. Langley in GPS World, Vol. 8, No. 7, July 1997, pp. 46–51.
• The International GNSS Service
“The International GNSS Service in a Changing Landscape of Global Navigation Satellite Systems” by J.M. Dow, R.E. Neilan, and C. Rizos in Journal of Geodesy, Vol. 83, No. 3-4, March 2009, pp. 191–198, doi:10.1007/s00190-008-0300-3; erratum: Vol. 83, No. 7, July 2009, p. 689, doi: 10.1007/s00190-009-0315-4.
“GNSS Processing at CODE: Status Report” by R. Dach, E. Brockmann, S. Schaer, G. Beutler, M. Meindl, L. Prange, H. Bock, A. Jäggi, and L. Ostini in Journal of Geodesy, Vol. 83, No. 3-4, March 2009, pp. 353–365, doi:10.1007/s00190-008-0281-2.
IGS Central Bureau website. IGS FAQ, Site Guidelines, data and product access information, and network details are available: http://igscb.jpl.nasa.gov
• Benefits of Multi-GNSS
“The Benefits of Multi-constellation GNSS: Reaching up Even to Single Constellation GNSS Users” by B. Bonet, I. Alcantarilla, D. Flament, C. Rodriguez, and N. Zarraoa in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 1268–1280.
“Assessment of GPS/GLONASS RTK Under Various Operational Conditions” by R.B. Ong, M.G. Petovello, and G. Lachapelle in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 3297–3308.
“Anomalous Harmonics in the Spectra of GPS Position Estimates” by J. Ray, Z. Altamimi, X. Collilieux, and T. van Dam in GPS Solutions, Vol. 12, No. 1, January 2008, pp. 55–64, doi:10.1007/s10291-007-0067-7.
Normally, my column following a webinar is dedicated to Q&A follow-up from the webinar. However, immediately following the April 22 webinar, I traveled to Phoenix, Arizona, to attend the ACSM/GITA conference, which I wrote about earlier this month.
This column is dedicated to answering questions I didn’t address during the webinar. Also, I always find the results from the polls I conduct during the webinar very interesting.
Poll #1: Have you or your work crews had to stop or alter your work pattern due to the lack of GPS satellites?
Total votes: 128, Yes: 73%, No: 27%
Gakstatter comment: This is consistent with other polls I’ve conducted regarding GPS satellite availability. The new GPS 24+3 configuration will help mitigate this problem. Read more about the new GPS 24+3 configuration in a three-part series I wrote earlier this year.
Poll #2: How often do you upgrade your GPS equipment?
Total votes: 113
Gakstatter comment: There’s no clear pattern here except to say that 46% of the users wait until at least 3 years before they consider upgrading their GPS equipment. That makes sense to me.
Poll #3: Does any of your GNSS equipment utilize GLONASS?
Total votes: 115, Yes: 39%, No: 61%
Gakstatter comment: When considering the result of this poll, keep in mind that there are very few “mapping-grade” receivers that are designed to utilize GLONASS. For example, there are very few, if any, sub-meter receivers that utilize GLONASS, primarily due to the lack of correction sources. SBAS doesn’t support GLONASS, DGPS (radiobeacon) doesn’t support GLONASS, and most CORS do not support GLONASS. Only recently did OmniSTAR begin supporting GLONASS. I think this trend will continue, although I doubt that SBAS or DGPS (radiobeacon) will support GLONASS in the foreseeable future.
Poll #4: Does any of your GNSS equipment utilize SBAS (WAAS/EGNOS/MSAS) as a primary source of corrections?
Total votes: 111, Yes: 60.5%, No: 39.5%
Gakstatter comment: This poll result doesn’t surprise me. Given that SBAS corrections are widely available, free of charge, reasonably accurate, and require no action by the user, it makes a lot of sense they are being used.
Following are some of the questions that were posed by the audience during the webinar:
Question #1: I am not sure, but when you say you’re “pushing” something out to us, it sounds like your trying to “push” something on us. Just a comment.
Gakstatter: I’m sorry about the webinar-speak. When I say “pushing the next slide,” that means I’m changing slides. I may change the way I say this. Thanks for your comment.
Question #2: Can you correct GLONASS signals with WAAS or other real-time technologies?
Gakstatter: WAAS (or any SBAS) doesn’t support GLONASS. Neither does DGPS (radiobeacon). This doesn’t mean that GLONASS measurement can’t be used, but you’ll be using uncorrected measurements to augment SBAS-corrected measurements. A case where it may be useful is when you’re mapping in an environment where there are a lot of trees. You might only have four GPS satellites visible that are being corrected via SBAS. In that scenario, there might be value in utilizing measurements from GLONASS satellites just to improve the PDOP, even though the GLONASS measurements are uncorrected.
Question #3: Do you feel manufacturers will begin to release lower-end mapping-grade GPS receivers with L2C and L5 functionality in the future?
Gakstatter: Yes, I do, but it will be a few years before there are enough satellites broadcasting an L5 signal. I think what you’ll end up seeing are inexpensive L1/L5 receivers (Galileo doesn’t support L2). They will not only be able to provide mapping-grade sub-meter, decimeter) but also RTK accuracies (cm-level). Since L2C and L5 are open civil signals, you won’t see the patent blocks that restrict competition for L1/L2 receivers like you do today.
I’m not saying L2C will not be supported at all. I think there will be L1/L2C/L5 receivers, but I think you’ll see L1/L5 on lower-end receivers.
Question #4: There is apparently some degradation of accuracy when using GPS and GLONASS for RTK. Have there been any rigorous studies quantifying this that you are aware of?
Gakstatter: I’m not sure I’d say I believe there is degradation in accuracy, but I wouldn’t count on GLONASS to improve accuracy. The value of GLONASS is improving productivity. Since it adds several satellite signals to the solution, it effectively eliminates GPS “brown-out” periods so RTK can be used 24/7. There was a rigorous study released by The Survey Association in the UK. The report focused on network RTK. They tested both GPS and GPS+GLONASS. You can download a copy of the report here.
Question #5: Does using GLONASS-capable receivers shorten the observation time required for fast-static points?
Gakstatter: My first thought is yes since generally more observables equates to shorter occupation time, but I would check with the manufacturer and follow their recommendations. Honestly, I’ve only used fast-static with GPS-only receivers so I don’t have any personal experience with your scenario.
Question #6: When is GLONASS-K launch scheduled? When can we receiver a valid CDMA signal?
Gakstatter: The first GLONASS-K satellite is scheduled for launch later this year. I haven’t seen a launch schedule beyond that. A representative from the Russian Space Agency is scheduled to present at the Institute of Navigation (ION) GNSS conference in September, so I’ll probably learn more at that point. However, it’s a lengthy process. It’s not just a matter of launching satellites. There are many other variables and unknowns such as the control segment and user equipment compatibility. I think it’s safe to say that we are a few years away from having a minimal GLONASS satellite constellation broadcasting CDMA.
Question #7: The visibility plots show one extra satellite in the “after” plots. Was that intentional? I would have expected there to be an improved number of satellites visible when one more was added to the plotted constellation.
Gakstatter: Good catch. In the “after” scenario, I set SVN-49 healthy, which it is currently not. The reason I did this was because SVN-49 is in an important slot in the 24+3 configuration. The status of SVN-49 is still undecided, but if they decide to not set it healthy they will move another satellite to take its place in the 24+3 configuration. If I would have kept it unhealthy in the “after” scenario, it would have only s
hown a 24+2 configuration. Clear as mud?
Question #8: Is 24+3 the solution to the blackout problem from now to 2014 stated by the GAO Report from last year?
Gakstatter: The definition of the 24+3 configuration had been around before the GAO Report. Personally, I don’t think the GAO Report had anything to do with 24+3. The 24+3 configuration just helps optimize the current satellites in orbit, whereas the GAO Report addresses the attrition of GPS satellites outpacing the addition of GPS satellites.
Question #9: Cellphone question: Is the move to 24+3 likely to degrade indoor GPS coverage – fewer peak sats => lower probability of seeing 4+ sats indoors?
Gakstatter: Interesting question. My first thought is probably so, although I think it would be a temporary problem. Assuming Galileo keeps pushing forward, that would be a big help for cellphone users, both indoors and outdoors.
Question #10: GPS Satellites are getting beyond the design life…is the USA behind schedule in satellite updates?
Gakstatter: GPS satellites have been unbelievably reliable. PRN-24, the oldest operational satellite, has been in operation since August 30, 1991. Since they have been so reliable, there hasn’t been as much pressure to launch GPS satellites. Prior to the 24+3 initiative, the minimum guaranteed constellation was 24 satellites. It costs $50-60 million to build each GPS satellite and another $150-200 million to launch it. With the GPS constellation hovering around 30 satellites these past few years, and government budgets tightening, I think it’s clear that the pressure to save money has resulted in a more relaxed launch schedule.
The delay in the Block IIF satellite (the first one being launched this week) was not a result of the above, but rather technical and program management mis-steps. The GAO Report was particularly critical of the IIF development.
Question #11: Do you see any future for ground-based free systems such as those broadcasting corrections in LF/MF radio, like the Coast Guard broadcasts?
Gakstatter: There is an interesting debate between DGPS (what you mention) and SBAS. The DGPS infrastructure has been in place and working reliably for mariners for better than a decade. Funding for DGPS seems solid for marine navigation, but less stable for inland-based applications (like the U.S. NDGPS system). I think the future of DGPS for mariners is solid for the next 10 years. Once there is a full constellation of satellites broadcasting GPS L5, the value of DGPS will be questioned.
Question #12: Will WAAS, EGNOS, etc. be needed after L1/L5 receivers can measure the iono effects themselves?
Gakstatter: I think it comes down to integrity. If the L1/L5 combo can deliver integrity that safety-of-life applications require (such as aviation), then one has to question the value of SBAS. My gut feeling is that the L1/L5 combo can’t and that some sort of augmentation will be needed to attain the integrity level required.
Question #13: What are your thoughts concerning Compass? Do you feel this will eventually be applicable for public use as part of a functioning GNSS?
Gakstatter: Compass is the GNSS wildcard. Since the Chinese aren’t particularly forthcoming with their plans, it’s hard to say. But I’m not sure that matters. With a full constellation of GPS, GLONASS (CDMA), and Galileo satellites in the future, that’s around an average of 25+ satellites in view at any one time during the day. If China doesn’t play well with others in a timely fashion, the user community won’t care what Compass brings to the table.
Question #14: If my current GPS receiver is not ready for L2C and L5, do I have to buy a new GPS or I can upgrade software/firmware later so that I can still use it?
Gakstatter: You’ll have to trade-in. Some might be upgradable to L2C, but L5 is a different story. It’s a completely different frequency. That affects the receiver as well as the antenna.
I wasn’t able to address all of the questions here, so look for more in the next newsletter. Particularly I’ll cover some discussion about reference frames, SBAS and L5.
Look for announcements in the next day or so about the Block IIF GPS satellite launch. It’s scheduled for Friday, May 21. It’s a new era with the first GPS satellite to broadcast an operational L5 signal.
Anthony Russo, director of the U.S. National Space-Based PNT Coordination Office, told the Munich Satellite Navigation Summit last month that, regarding the May 7, 2009, U.S. General Accountability Office report that forecast gaps in constellation availability, “The GAO will revise its report somewhat. They were using a model that was a little too cautious, one used by the [GPS] Wing. But satellites on orbit have been performing past estimated life. Further, we can turn off secondary payloads to conserve energy onboard satellites [and thus extend life] if needed.”
GPS satellites have proven themselves very hardy in space, outlasting their predicted lifetimes. Relying on those longer lives, the Air Force has saved money by replenishing upon need. But the GAO report apparently used more conservative lifetimes for the mathematical models of constellation availability. When those models were projected against the real-world timelines for IIF and Block III, some gaps appeared. Now the GAO and the Wing will re-undertake this exercise, factoring instead the longer lifetimes that the satellites have proved capable of.
In a hearing before the U.S. Senate Subcommittee on Strategic Forces, Committee on Armed Services on March 10, the following exchange occurred.
Senator BEN NELSON. “Ms. Chaplain, last year, the GAO issued a report that resulted in some significant and very negative press coverage about the health and reliability of the GPS system. Could you update us on the GAO’s assessment, now, of the GPS system?”
Ms. CHAPLAIN (Director, Acquisition and Sourcing Management,
from the Government Accountability Office (GAO)).
“Yes. We’re currently conducting a review—a follow- on review. And the two programs we looked at, on the satellite side last year, were the IIF program and the IIIA program. And the IIF program has made some progress, and it’s getting ready for a launch fairly soon.
“The IIIA program is on—it’s meeting its schedule currently. We still have concerns about the compressed nature of the schedule, and all the very difficult activities ahead for GPS IIIA, but it is not encountering any severe problems at this point.
“When we look at the health of the Constellation, our findings are pretty similar to last year’s. One thing we weren’t discussing in last year’s report, that should probably brought out more when we talk about it this year, is some of the options the Air Force has available to it to manage GPS if they do have—experience some dips in the Constellation availability. There are options that they have to get through those periods.
“Our concern is, you just—you don’t want to find yourself in a state where you’re looking at those kind of options; you want to make sure you do everything you can to keep the program healthy, resourced, and on track.”
A recent story in Spaceflight Now attributes to Gary Payton, the undersecretary of the Air Force for space, a statement that the Air Force currently has under review an option is to move some high-inclination flights, including future GPS satellite launches from Cape Canaveral to Vandenberg Air Force Base in California.
“We would like to be able to get to the point where we can project six months or a year down the road that we’re going to have a surge of launches all ganged too close together, that we may pull a GPS launch over to Vandenberg,” the story quotes Payton as saying. “The same rocket and orbitology allows you to launch out of Vandenberg.”
I hope you’ve enjoyed and benefited from the webinar series as much as I have. I think that given the limited travel budgets in this economy, they are one of the most powerful tools for collaborating. I consider it collaboration because I learn also. Your questions and comments make me think about topics I might not normally consider.
I also have to give credit to our marketing folks in spreading the word about our webinars. I’ve spoken to others who conduct webinars and I don’t hear of anyone attract the attendance numbers that ours are do (if I may be so bold as to toot our horn). I didn’t see the final attendance numbers on the last webinar, but I think we had over 600 registered. By early next year, I think the number should reach 1,000 for each of the survey/construction/GIS webinars. Hopefully, in the next few months we’ll also start up a webinar series for GeoSpatial Solutions, which I started working on earlier this month.
As I’ve been accustomed to doing, this newsletter addresses the questions you submitted during the Sept. 15 webinar entitled “What Can GLONASS, GPS L2C, and GPS L5 Do for You?”.
There were some great questions during the webinar, and a lot of them. There were so many, in fact, that I’m going to break them up into a couple of different newsletter issues. Also, I need to update you on my trip to ION GNSS a couple of weeks ago. I might mix up the next newsletter with more Q&A as well as the ION GNSS update.
Lastly, don’t feel the need to wait until the next webinar to send me your comments/questions. I can guarantee you that many others have the same questions that you do.
Question #1: Recent Statement: GLONASS satellite signals are not used nearly as much as the GPS satellite signals (domestically) — is this true? If so, what is the percentage of GPS usage vs. GLONASS in the states?
Gakstatter: The general statement is true. GLONASS is used predominately in high-precision RTK (real-time kinematic) applications that require centimeter-level accuracy. Even in that segment, I think only a minority of the existing survey receivers utilize GLONASS. But that’s considering legacy receivers that have been in operation for many years. You should remember that GLONASS only became a widely adopted technology in the last few years and it’s still an option on most survey receivers unless you purchase the top-of-the-line model. As recent as five years ago, several mainstream manufacturers still didn’t support GLONASS.
Also, consider that the popular entry-level GPS L1 survey receivers such as the Magellan ProMark 3 line don’t support GLONASS at all.
On the GIS front, GLONASS is just starting to make its way into mapping-grade receivers such as the Trimble GeoXH and Topcon GMS-2 Pro. But realize that correctors for GLONASS aren’t supported by real-time correction systems such as WAAS/EGNOS/MSAS or DGPS/NDGPS or OmniSTAR. GLONASS isn’t supported by OPUS or other online post-processing services either.
But make no mistake about it, GLONASS usage is increasing substantially. This is mainly due to GPS “brownout” periods where there aren’t enough GPS satellites throughout the day to be productive. It’s simply too expensive for work crews to sit idle while waiting for the GPS constellation to improve during parts of the day.
Lastly, next year the Russians are introducing a significant change with their new generation GLONASS-K satellites. They are going to begin supporting CDMA (vs. FDMA they support now). You can think of this like VHS vs. Beta VCRs of 20 years ago. Today, a GPS/GLONASS receiver is basically two receivers in one box, just like a VCR player that would support VHS and Beta formats. This makes a GPS/GLONASS receiver difficult to design, power hungry and generally inefficient. This is the reason you do not find GPS/GLONASS receivers in the consumer GPS market and rarely in GIS/GPS receivers. However, this is going to begin changing next year as Russia will begin to support CDMA signal structure. This will be the start of a new era in simplifying the design of GPS/GLONASS receivers. I believe it will mark the beginning of the wide-spread adoption of GLONASS. However, this is not an overnight process. It will be many, many years before enough operational GLONASS-K satellites are in orbit to support a CDMA GPS/GLONASS receiver. Of course, it’s also critical that the Russian space program stay focused (politically and financially) in order to achieve this.
Question #2: Will current GLONASS receivers work with the new (GLONASS) “K” satellites?
Gakstatter: It is my understanding that the GLONASS-K satellite will support legacy signals and signal structures. Essentially, they would be broadcasting FDMA and CDMA signals. So, the answer is yes. I will report back to you if I hear anything different as this is a critical issue given the large number of GPS/GLONASS receivers in use today.
Question #3: What does the “k” stand for in RTK?
Gakstatter: I apologize for “flinging around” acronyms so loosely.
RTK is an acronym for Real-Time Kinematic. Essentially, it’s a GNSS technology that’s capable of providing centimeter-level positioning in real time while it is moving. RTK utilizes the message carrier (carrier phase) rather than the message itself.
Question #4: Why will traditional GPS L1/L2 receivers become obsolete after Dec 31, 2020?
It’s important to note that the Dec 31, 2020 date is not a date in which your legacy receiver will stop working. After that date, the US Department of Defense says they won’t guarantee support of semicodeless techniques. In other words, it may work and it may not. The risk is with the user.
Question #5: What about the accuracy of L2C code? Is it like C/A or P code?
Gakstatter: L2C provides a pilot carrier for L2. Before L2C, the architects of the original GPS never intended for the civil community to be able to utilize L2. But some very smart engineer/entrepreneurs figured out a way to track the L2 carrier in a “round-about” way via the semicodeless technique mentioned above. With L2C, the semicodeless technique isn’t required any longer so the L2C signal-to-noise (SNR) value is stronger.
However, there aren’t enough satellites (only 7) in orbit broadcasting L2C at this point to make a significant difference.
Secondly, L2C has a code similar to C/A code broadcast on L1, but much improved. However, this isn’t being broadcast on L2C at this point due to the ground control segment of GPS not being ready yet. Last indication I received was that it was about two years away from being ready.
Question #6: If there is a black out in GPS in a GPS/GLONASS receiver, how will it affect? No Black out in GLONASS.
Gakstatter: I’m assuming you are referring to a total black out of GPS signals. GLONASS isn’t at the point where you can rely on it as a stand-alone system. It lacks a sufficient number of satellites (17) and the quality/reliability of the measurements isn’t nearly as good as GPS.
Question #7: Are certain frequencies more stable/reliable than others.
Gakstatter: GPS sign
als/frequencies (L1 C/A and L2C) are very stable and reliable. They are the most reliable satellite navigation signals in the world. I wouldn’t say that a single GPS signal or frequency is more stable or reliable than another. However, there are a limited number of satellites (seven) that broadcast L2C so it’s not as available as it will be when a full constellation of satellites will be broadcasting L2C (several years from now).
Many users have GPS/GLONASS receivers. GLONASS, and Russia is very open about this, is not as stable or reliable as GPS yet. While not useful yet as a stand-alone system, GLONASS has proven to be very useful as an augmentation to GPS. This is the reason that GPS/GLONASS receivers have become so popular in recent years in high precision RTK systems.
Russia has stated that their goal is to match GPS performance in the future.
Question #8: How will the autonomous accuracy improve with L5 or L2C?
Gakstatter: Multiple frequencies allow the receiver to directly mitigate the effects of the atmosphere which is the major source error in GPS positioning.
I’ve heard it been discussed quite widely that decimeter accuracy without correction will be possible with a dual frequency receiver (L1/L5). Furthermore, since both L1 and L5 (and L2C) are open signals (unlike legacy L2), multiple frequency receivers will be widely available and a fraction of the cost of today’s dual frequency receivers.
Question #9: Will any abilities of the L1/L2 w/ L2C be downgraded when semicodeless is disabled?
Gakstatter: This is a very good question. The difference I can think of may be the number of satellites broadcasting L2C at that time. If there are still a number of legacy satellites that aren’t broadcasting L2C, one may lose the ability to utilize those satellites.
Also, it’s important to understand that semicodeless isn’t necessarily going to stop working after December 31, 2020. The DoD merely states that they won’t guarantee it will work after that date. In other words, the DoD might choose to test or utilize a feature that might disrupt semicodeless receivers and they aren’t obligated to inform the civilian community that they are doing so.
Looking into the future, I’m guessing that receiver manufacturers will create firmware in the receivers (L1 C/A, L2, L2C) that might be capable of detecting this scenario and react accordingly.
Question #10: If you have a receiver supporting L1/L2/L2c/ glonass where you are tracking 16+ satellites has there been any though on a weighting system for satellites in your solution?
Gakstatter: Another good question. I’m not sure how the receivers handle this. I will ask a couple of receiver designers I know. I am familiar with some receivers (mapping-grade receivers using code phase) that utilize signals from satellites for which there are no corrections available in order to improve the PDOP. For example, some satellites may not be visible by more than one SBAS reference station and therefore no correction would be issued for that satellite by the SBAS…but the range data from that satellite may still be used to improve the PDOP and position.
Question #11: Are the ground stations shown in the WAAS slide (SBAS(2) I believe) all operational today?
Gakstatter: Yes. There are currently 38 WAAS reference stations and all of them are operational today. Twelve were added in the last couple of years (red dots on the map below).
Four were added in central/eastern Canada, four were added in Alaska and five were added in Mexico. This extended the WAAS service area significantly to the north and south into Canada and Mexico and significantly improved WAAS performance in Alaska.
Question #12: What is the expected accuracy of WAAS in North America and can WAAS be received under canopy (forested) areas?
Gakstatter: Well, like all questions about GPS accuracy, the answer is “it depends”.
There are two major factors when considering the accuracy of WAAS.
The first is the WAAS itself. Looking at the WAAS Performance Report published quarterly by the National Satellite Test Bed, WAAS accuracy throughout North America is well under a meter (horizontal).
Secondly is the quality of the GPS receiver one is using. A standard consumer-grade GPS receiver using a SiRF (or other) GPS chipset or a GPS-enabled mobile phone is not going to deliver submeter accuracy. Those receivers simply weren’t designed with accuracy as a primary design criterion. On the other hand, there are several GPS receivers available that were designed with professional users in mind that are able to optimize WAAS accuracy and achieve submeter accuracy.
Operation under tree canopy is even a trickier subject. Among GPS receivers designed for professional users, there is a subset that has been optimized to operate under tree canopy. First, let me be clear that GPS accuracy degrades under tree canopy for all GPS receivers. It’s just a matter of how much it degrades.
There are two primary issues when operating GPS receivers under tree canopy: accuracy and tracking. Great accuracy is not worth anything if the receiver can’t track satellites. On the other hand, great satellite tracking does little for the professional user if the accuracy is horrible.
Utilizing WAAS under tree canopy has the additional challenge of the GPS receiver needing to track one of the two WAAS broadcasting satellites (GEOs). Their signal is affected by trees just like GPS satellites. Some companies have developed technology that allows their GPS receivers to temporarily lose track on the WAAS GEO satellite for up to 30 minutes and still maintain WAAS accuracy (or close to it).
Question #13: Is there a live web page that is good for survey planning, based on GPS satellite positions?
Gakstatter: There are several GPS satellite planning software packages available as free downloads. Trimble, Topcon, and Leica Geosystems offer them. These require the user to install the software on their computer and update the almanac frequently.
There is one on-line GPS satellite planning tool from NavCom Tech that’s very convenient for two reasons. First, you don’t have to install any software on your computer. Secondly, it updates the almanac automatically. It has a couple of drawbacks. The major one is that it doesn’t consider GLONASS or SBAS satellites. Secondly, one can’t adjust the elevation mask. Hopefully, NavCom will consider adding those features in the future.
I wrote an article on this subject recently. You can view it here.
AeroScout Inc. has unveiled a combination GPS and Wi-Fi asset management system that has been selected by the U.S. Air Force 309th Aerospace Maintenance and Regeneration Group (AMARG) for its 110 million-square-foot outdoor facility at the Davis-Monthan Air Force Base in Arizona.
The system includes battery-powered tags that use both GPS to determine location outdoors and Wi-Fi to transport asset location and other information over a customer’s network, according to AeroScout.
The large-scale deployment will initially include 1,000 AeroScout GPS Wi-Fi tags for essential support equipment. The 309th AMARG stores thousands of aircraft and aircraft parts at the outdoor facility at Davis-Monthan outside Tucson, Arizona. In addition to tracking the precise location of essential support equipment, the AerosScout system will provide automated inventory reports, the company said.
The system will leverage the facility’s existing Wi-Fi network and 42 access points with high-gain antennas, which are also used for data communication. Using AeroScout’s MobileView 4.0 software, staff will be able to search for, locate, and manage essential equipment, according to the company.