Agilica BV has completed a feasibility study to develop a complementary PNT (positioning, navigation, timing) system that would enable precision drone navigation and landing in environments where GNSS signals are degraded or unavailable.
Funded by the European Space Agency, the study validates the technical and commercial viability of the AGL system. The system integrates GNSS receivers into the infrastructure for seamless transition to and from GNSS in high-impact applications, including drone landings on moving vessels, operations in indoor facilities, and autonomous deliveries in complex urban or offshore environments.
“Landing a drone on a moving ship in dynamic conditions is one of the toughest challenges in drone autonomy,” said Bart Scheers, Agilica’s COO. “Our AGL system is built to solve this — not by replacing GNSS, but by augmenting it. This feasibility study confirms that our patented UWB approach can extend PNT services, with sub-20 cm precision in GNSS-denied zones.”
The AGL system is based on time-of-flight ultra-wideband technology and functions like a dedicated terrestrial GNSS network to deliver centimeter-level accuracy and resilience in GNSS-compromised environments where vision-based systems and QR codes fall short, according to the company.
The study represents a critical step on the commercialization roadmap of Agilica’s core product — the AGL system — by adding built-in compatibility with GNSS and Galileo High Accuracy Service to its ultra-wideband positioning solution for drones in the maritime, logistics, and urban air mobility sectors.
Safran Electronics & Defense has introduced BlackNaute, a new autonomous positioning, navigation and timing (PNT) system. The system integrates Safran’s HRG Dual Core inertial navigation technology, the Skylight multi-mode GNSS receiver board and an atomic clock to offer navigation resilience in challenging electronic warfare environments.
BlackNaute’s built-in atomic clock is designed to maintain precise timing, which is essential for secure communications and collaborative combat operations. The system features advanced anti-jamming and anti-spoofing algorithms, which have been validated in more than 16,000 operational cases. These capabilities allow BlackNaute to detect compromised signals and automatically switch to autonomous and trusted navigation and timing sources to ensure continuity of operations.
Its modular design allows it to be adapted across a variety of platforms. Airbus Helicopters has selected the NH90 to be equipped with this new Embedded GNSS and Time INS (EGTI).
“What we are offering today is not just a new solution — it’s an operational guarantee, designed to meet the challenges of electromagnetic warfare,” said Alexandre Ziegler, Executive Vice President, Defense Global Business Unit at Safran Electronics & Defense. “It is a concentration of innovation combining precision, versatility, and security to ensure positioning, navigation and timing — anywhere, under any circumstances.”
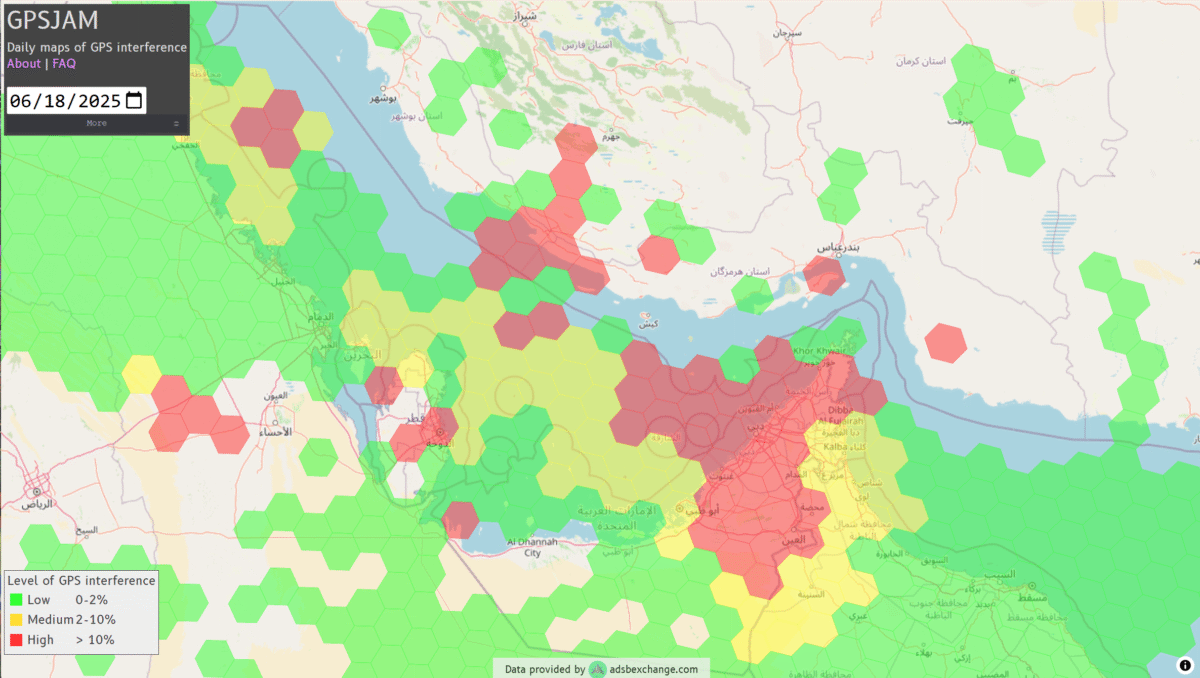
GNSS jamming is causing confusion for ships traveling through the Strait of Hormuz, reports gCaptain. The regional threat levels are labeled “significant” because of air strikes between Iran and Israel, according to the Joint Maritime Information Center (JMIC). Maritime threat levels are marked as “elevated”.
The JMIC highlighted GNSS jamming problems around the Port of Bandar Abbas and throughout the Strait of Hormuz and Persian Gulf regions. Nevertheless, commercial shipping traffic has continued at normal rates.
Naivgational error is considered the cause of a collision June 17 between two tankers in the Gulf of Oman. The Very Large Crude Carrier (VLCC) Front Eagle, with 2 million barrels of Iraqi crude bound for China, hit the Suezmax tanker Adalynn 15 nautical miles off Fujairah. There was fire on both ships, but no injuries. The Front Eagle appeared to be onshore in Iran days before the collision.
Nearly 1,000 ships in the Gulf have been affected by mass interference since the start of the Iran-Israel conflict on June 12, according to shipping analysis firm Windward. Recent tracking data has shown unusual positioning errors, with vessels appearing to be in impossible locations.
Thales, a European leader in resilient navigation, announced a €55 million ($63 million) investment to expand its industrial sites in Châtellerault and Valence, France. The investment, scheduled between 2025 and 2028, aims to address increasing demand for advanced navigation solutions in both civilian and military sectors and to reinforce the company’s sovereign industrial base.
The company is responding to rising threats such as GNSS jamming and spoofing by deploying a suite of resilient navigation technologies. These solutions combine precision, autonomy and security, which are critical for maintaining operational continuity in military missions and civil aviation. Thales integrates inertial navigation systems with GNSS signal reception, enabling reliable navigation even in contested environments. The TopAxyz inertial navigation system ensures autonomous capability, while the TopStar-M receiver and TopShield anti-jamming technology protect signal integrity. These advancements are supported by France’s Directorate General of Armaments under the OMEGA program for the modernization of GNSS equipment for the armed forces.
At the Châtellerault site, Thales plans to quadruple production capacity for inertial navigation systems by 2028. With six decades of expertise in laser gyroscopes, this facility is the only European supplier equipping civil aircraft and will expand its offerings for aircraft, land vehicles, ships and munitions. In Valence, mass production of TopStar-M receivers and TopShield systems is set to begin in 2026. The site will also introduce a new production line for inertial MEMS sensors, a technology that combines compact design with high performance, positioning Valence as a leader in France’s MEMS technology sector for defense. The launch will be accelerated with support from Tronics Microsystems for specialized industrial expertise.
Currently, more than 800 employees work at the two sites, with plans to hire 150 additional staff by 2028. The investment seeks to strengthen Thales’ regional presence and contribute to France’s position in the industry.
Russia’s war with Ukraine continues to affect GNSS signal availability in the Baltic Sea, reports LRT News. Aircraft and ships near the Lithuanian seaport of Klaipėda are losing signals becausse of Russia’s efforts to shield its Kaliningrad exclave from potential airstrikes, said Saulius Skvernelis, speaker of the Lithuanian parliament.
“The Russians are protecting the Kaliningrad region from potential air attacks,” Skvernelis told LRT TV. “This is not specifically intended to disrupt or harm our aircraft flying to Lithuania. It’s just that the protection zone extends beyond the Kaliningrad region’s borders, and the threat, the interference, is affecting our territory as well.”
Skvernelis warned that this problem will persist across the region as long as the Kremlin continues its war in Ukraine.
Thirteen European Union member states have called on the European Commission to respond to interference with GNSS in EU countries. In a joint letter, the countries stressed that GNSS interference cases are not random incidents but systematic and deliberate action by the Russian and Belarusian regimes aimed at destabilizing regional infrastructure, especially in the transport sector, reports LRT.
“We can appeal to all EU countries and any institution, but it won’t help as long as Russia uses this kind of electronic protection for its military sites to defend itself against Ukrainian strikes,” Skvernelis said. “We must force Russia to end the war and then this problem will simply go away.”
SpaceX successfully launched the GPS III SV-08 satellite into orbit on May 30 from Cape Canaveral Space Force Station, marking a significant milestone for the U.S. Space Force’s rapid-response capabilities. The mission, executed in close coordination with Lockheed Martin and SpaceX, launched the eighth GPS III satellite into the constellation after an accelerated preparation period of just three months, well ahead of the traditional two-year timeline for national security launches.
The GPS III SV-08, named after the pioneering NASA mathematician Ms. Katherine Johnson, is part of the next-generation GPS IIIF satellites designed to enhance accuracy and incorporate advanced anti-jamming features for both military and civilian users. Built by Lockheed Martin, the spacecraft is equipped with M-Code technology, delivering signals that are three times more accurate and eight times more resistant to jamming than previous generations. These improvements are critical as threats to GPS reliability, such as jamming and interference, continue to increase.
In a press statement, Col. Andrew Menschner of the Space Force emphasized the urgency behind the accelerated launch schedule to mitigate increasing GPS jamming and interference: “There are 38 GPS satellites in orbit, 31 of which operate on a daily basis. We have a healthy redundancy in the constellation. But the addition of SV-08 allows the constellation to build resistance against those who would try to interfere with GPS signals.”
This launch marks the second time the Space Force has demonstrated its ability to deploy a GPS satellite on a compressed schedule. The previous rapid-response mission, dubbed Rapid Response Trailblazer, saw the seventh GPS III satellite launched in December 2024 after five months of planning. For SV-08, the team further reduced the schedule by 40%, reflecting lessons learned and increased efficiency.
Looking ahead, the final two GPS III satellites will be launched on United Launch Alliance’s Vulcan rocket, paving the way for the next-generation GPS IIIF satellites. According to Lockheed Martin, these spacecraft will introduce even greater anti-jamming capabilities, fully digital navigation payloads and advanced features such as regional military protection and improved search-and-rescue support, further enhancing the robustness and utility of the GPS constellation.
VIAVI Solutions Inc. has introduced its second-generation RSR Transcoder, engineered to maintain operational capability in GPS/GNSS-denied, degraded or disrupted space operational environments.
This development comes amid a global increase in GPS and GNSS jamming and spoofing, which have become standard tactics in electronic warfare. These hostile activities, while primarily aimed at military operations, also threaten sectors that depend on precise timing and geolocation, such as aviation, communications and emergency services.
The new RSR Transcoder is designed to deliver assured positioning, navigation and timing (PNT) in a wide range of outputs to upgrade legacy systems. The device features a GPS full constellation simulator and employs a patented algorithm to rapidly convert assured inputs — including M-Code, SAASM, IMU/INS, and other signals of opportunity — into universal GPS L1 and L2 signals with both C/A-code and P-code outputs. This capability allows for the straightforward enhancement of older GPS systems, providing them with modern, resilient PNT functionality.
The RSR Transcoder is housed in ruggedized IP68 enclosures suitable for deployment on land, sea and air platforms. It is capable of covert, lights-out operation and offers a 100 Hz output rate with an ICD-GPS-153 interface. The device is available with holdover oscillator options of 4, 8 and 24 hours, supporting continued operation during signal loss.
On Display at the Joint Navigation Conference
The RSR Transcoder will be demonstrated at the 2025 Joint Navigation Conference, which is held June 2-5 in the Greater Cincinnati Area and jointly hosted by the Departments of Defense and Homeland Security. It will be on display at VIAVI’s booth #406. VIAVI’s Inertial Labs division will also demonstrate recent breakthroughs in D3SOE navigation at booth #430.
VIAVI and its Inertial Labs division will also give three presentations:
“3D Vision-Based Positioning for Autonomous Aerial Platform Navigation and Human-in-the-Loop Reconnaissance Mission”: Monday, June 2 at 1:50 PM ET
“Anti-Jam/Spoof Phased Array Antenna”: Wednesday, June 4 at 10:50 AM ET
“Retrofitting At-Risk GPS Defense Equipment with a Multi-Orbit LEO and GEO Clock System for Resilient PNT Services”: Wednesday, June 4 at 11:30 AM ET
oneNav has developed an L5-direct GNSS receiver ASIC, a breakthrough that enables devices to directly acquire and track L5-band satellite signals without relying on the older, more vulnerable L1 signals. The L5-direct receiver was rapidly designed and brought to market using the GlobalFoundries 22-nanometer FDX platform, which offers advanced mixed-signal integration and ultra-low power performance for both radio frequency and digital functions.
The new receiver features a unique processor architecture, described as a “GPU for GNSS,” that eliminates dependence on L1 signals. This approach is designed to address critical vulnerabilities in aviation, defense and consumer navigation applications, where L1 signals are increasingly susceptible to jamming and spoofing. According to oneNav, the L5-direct technology is completely immune to L1 jamming and offers six to seven times greater resilience to interference and jamming in the L5 band compared to legacy solutions. It also delivers a tenfold improvement in measurement precision, faster initial location acquisition, enhanced accuracy in dense urban environments and reduced power consumption compared to L1-dependent receivers.
L5-direct can be deployed across defense, national security, industrial and consumer markets, offering a significant boost in jamming resistance for GPS-based positioning and timing applications.
“The need for ultra-low power consumption with high jamming resilience is acute in the rapidly growing unmanned vehicle segment, including drones,” said oneNav CEO Steve Poizner.
Earlier this year, oneNav partnered with three military agencies to evaluate L5-direct in terrestrial, maritime and aerial environments under simulated electronic warfare conditions. The trials confirmed the technology’s immunity to L1 interference and demonstrated its superior resilience to L5 jamming.
Key features of the GlobalFoundries 22FDX+ platform that enabled this innovation include optimized power-performance balance, advanced mixed-signal integration, ultra-low power consumption and enhanced RF performance, supporting a wide range of applications.
The L5-direct technology is now available as licensable intellectual property and can be customized for use in a range of applications, from consumer wearables to unmanned aerial vehicles. It can also complement military-grade M-Code solutions for applications requiring high resilience, low power and rapid signal acquisition.
In today’s hyper-connected world, GNSS signals face unprecedented threats from jamming and spoofing attacks. As these signals traverse 20,000 km from satellites to Earth, they become vulnerable to interference that can degrade positioning accuracy or eliminate position availability altogether. Understanding how to recognize these attacks and implement protective measures has become critical for industries depending on precise positioning.
Two Distinct Threats
Jamming occurs when signals are disrupted or denied, making it difficult or impossible for receivers to interpret information correctly. In contrast, spoofing involves malicious transmission of fake signals that mimic real ones, tricking receivers into delivering inaccurate location data. Spoofing is basically someone trying to pretend they’re a real satellite.
While jamming focuses on disruption through noise and interference, spoofing relies on deception, sending false signals that systems accept as legitimate. Both pose serious challenges, but their differences require unique detection and prevention strategies.
When jamming occurs — whether it be noise (chirp) jamming, tone jamming or pulsed jamming, devices may experience significant signal degradation resulting in interrupted communication and loss of both data and situational awareness. By contrast, spoofing — be it meaconing, coherent or signal overlay — can subtly alter data, leading to false readings and misguided actions.
How to Know If Your Signal is Under Attack
With the surge in electronic devices in today’s IoT-rich world, interference from radio frequencies — whether intentional or situational — is common. This is partly because multiple sensors are often situated close to each other on equipment, vehicles, drones and more. So how do you know if your system is under attack? GNSS interference typically manifests through several telltale indicators, including erratic or unstable device performance, frequent signal interruptions or a marked decline in data precision. Deception often reveals itself via red flags such as unusual location data inconsistencies, abrupt and unexplained shifts in data patterns, signal quality degradation (e.g., drop in carrier-to-noise ratio or high noise floor), sudden position drifts, frequent re-acquiring of signals, large discrepancies detected by Kalman filters or unexpected signal peaks.
With jamming, the first step is to recognize you’re being jammed by using a receiver as a jamming detector and utilize an onboard spectrum analyzer to identify interfering frequencies. Not only is this valuable for external jamming, but it is hugely helpful for companies as many accidentally self-jam with other components on the device.
Identifying these signs promptly is crucial for preserving system functionality and preventing potentially catastrophic consequences.
Industry Impact: Beyond Navigation
Beyond the military and cybersecurity, public safety, transportation, marine, construction, agriculture and utilities are highly susceptible, posing a significant threat.
Autonomous vehicle systems face the greatest risk, as they depend heavily on GNSS data for navigation accuracy and split-second decisions. Jamming can cause vehicles to struggle with lane-keeping, misinterpret traffic signals, or stop without warning, while spoofing presents a more subtle, yet still dangerous threat by potentially diverting vehicles from intended routes with harmful intentions, increasing the likelihood of collisions with obstacles, other vehicles or people.
Interruptions in key transportation networks can also lead to vehicles being misdirected, potentially leading to collisions, and even becoming targets for malicious actions like cargo theft. Railway systems have emerged as major targets, with “ransomware attacks becoming the most prominent threat against the rail sector” across the EU, according to Marianthi Theocharidou of the European Union Agency for Cybersecurity (ENISA). In the Baltic region alone, 46,000 aircraft exhibited possible jamming signs between August 2023 and March 2024.
In ag, precision farming technologies requiring reliable data for optimizing planting, watering and harvesting schedules face major disruptions that translate directly into resource waste and profit drain.
Navigation systems critical for safety and cargo protection are particularly vulnerable in maritime and logistics. Recent incidents include the hijacking of trucks carrying over $1 million worth of Santo tequila in Texas, where investigations suspect spoofing made the vehicles appear in the right location when they weren’t.
The Growing Accessibility of Attacks
Where skilled hackers once dominated the scene, inexpensive jammers now flood the market. Despite being illegal in most countries, these devices — often disguised as USB sticks or car chargers — have become increasingly accessible. One tiny 10mW chirp jammer plugged into a car socket can knock out GNSS signals within several miles.
Spoofing, once a complex task, is now achievable using open-source software or low-cost components, making robust countermeasures essential for systems across all industries.
Trimble’s Multi-Layered Defense
When looking for ways to mitigate these risks, it’s important to look for technology with embedded security features designed to combat both jamming and spoofing via cutting-edge innovation in radio frequency and processing technologies. Trimble’ GNSS receivers incorporate Maxwell technology, including:
Digital Signal Processing (DSP) – rejection of spoofed signals through sophisticated tracking algorithms to detect multiple signals.
Satellite Data Verification – historical logging of orbital parameters to detect unexpected changes or deviations from reasonable bounds, enhancing reliability.
Autonomous integrity monitoring (RAIM) for identifying and rejecting potentially spoofed satellite data, a practice well-established in the aviation industry.
Real-time monitoring with position sanity checks, limited satellite search windows and worldwide testing to stay ahead of the curve in developing further protection technologies.
Trimble solutions monitor and analyze the signals received in each of the GNSS frequency bands using the receiver’s ProPoint positioning engine. Trimble ProPoint GNSS technology allows for flexible signal management, which helps mitigate the effects of signal degradation and provides a GNSS constellation-agnostic operation. For example, when individual frequencies and constellations are spoofed or jammed, the receiver continues to provide positioning using available measurements. The onboard spectrum analyzer feature helps users identify interference on the bench or post-mission and take steps to remove.
In the past year, Trimble has added support for Galileo Open Service Navigation Message Authentication (OSNMA).This helps safeguards receivers by verifying the authenticity of Galileo navigation data, effectively mitigating data-level spoofing threats and bolstering overall system security. ProPoint receivers also have the ability to verify GPS and BeiDou-3 broadcast ephemeris via RTX NMA. This uses Trimble’s global network of reference stations with validity flags sent over MSS and IP links.
The Path Forward
With spoofing incidents expected to rise, the time for vigilance is now. Organizations must conduct risk assessments to identify vulnerabilities, implement multi-layered defense strategies and stay informed about emerging threats.
Through participation in global test programs like the JammerTest in Norway and the DHS’s GET-CI, Trimble has demonstrated the importance of continuous innovation in protection technology. During the JammerTest in September 2024, Trimble engineers joined the world’s largest GNSS jamming and spoofing exercise, testing the resilience of its positioning technology. The team drove a van packed with receivers and raw radio frequency (RF) data recorders from Munich to Norway. On the way they collected data through various terrains and conditions, including tunnels, ferries and bridges. On location, they participated in intense jamming, spoofing and meaconing tests across multiple sites, gathering data on various Trimble receivers, and also observing the performance of Trimble IonoGuard technology in the high ionospheric activity of northern latitudes. The event provided critical insights into GNSS interference detection and protection from jamming and spoofing, ultimately shaping the future development of Trimble Positioning Services and the industry.
As GNSS signals become increasingly critical for autonomous systems, smart cities and precision applications, protecting their integrity isn’t just about maintaining accuracy—it’s about safeguarding lives, preserving economic interests and ensuring the reliable operation of essential infrastructure.
The question isn’t whether GNSS interference will affect your systems, but when. By recognizing the warning signs, understanding the risks, and implementing robust protection measures, organizations can stay ahead of evolving threats and maintain the precision their operations demand.
Advanced Navigation has successfully demonstrated a hybrid solution — AdNav OS Fusion — for long endurance GNSS-denied navigation, a software-fused inertial-centered architecture that can be updated or modified for harsh environments and mission requirements, including on the moon.
This advancement is achieved by integrating a strategic-grade fiber-optic gyroscope (FOG) inertial navigation system (INS) with a new class of navigation aid: a laser velocity sensor (LVS). The result is a fused hybrid architecture that delivers precision and reliability in even the most challenging environments.
Advanced Navigation’s FOG INS, which is sensitive enough to detect the Earth’s rotation, provides that foundation by delivering precise attitude. Complementing this, the company’s LVS uses infrared lasers to measure a vehicle’s ground-relative 3D velocity with exceptional accuracy and long-term stability. Unlike conventional sensors, LVS performs reliably on both ground and airborne platforms, as long as it maintains a clear line of sight to the ground or a stationary surface.
Beyond its role as a velocity aid, LVS also enhances navigation resilience by detecting GNSS spoofing. By comparing its independent velocity measurements against GNSS-derived velocity, LVS adds an extra layer of security to assured positioning, navigation, and timing (APNT) strategies.
AdNav OS Fusion draws on sophisticated algorithms to interpret and filter sensor data. The software is designed to dynamically weigh the input from each sensor, adjusting in real time based on reliability scores, environmental conditions and operational context. This ensures continuous, high-confidence state estimation even when signals are lost, degraded or distorted.
Demonstration with real-world data
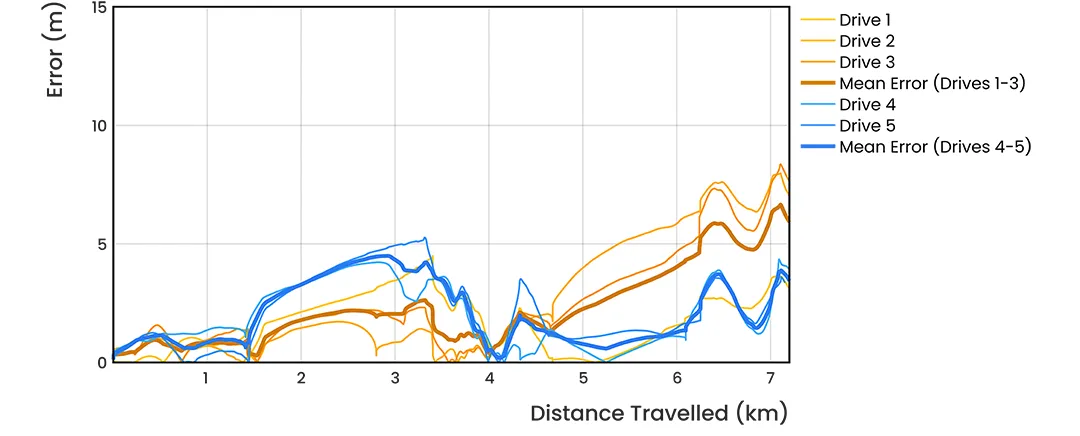
Advanced Navigation conducted a series of rigorous real-world driving tests. Across five trials, the system delivered exceptional performance with an average error per distance traveled of 0.053% compared to a GNSS reference.
At the starting point, GNSS on the INS was disabled in the state estimation process, forcing the system into dead-reckoning mode. RTK GNSS was logged separately as a reference. This approach allows for a direct comparison between the computed dead-reckoning solution and a trusted position reference.
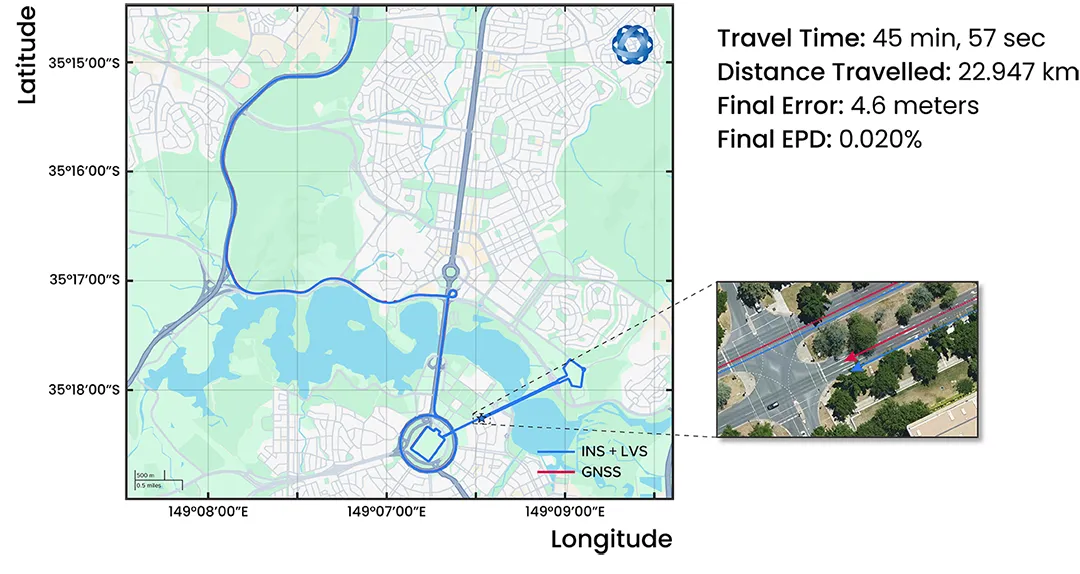
The below data shows dead-reckoning results from a 23 km drive around Canberra, Australia. GNSS was not used at any point in the drive for heading or position. RTK GNSS is shown as the red line, while the hybrid system’s result is shown in blue.
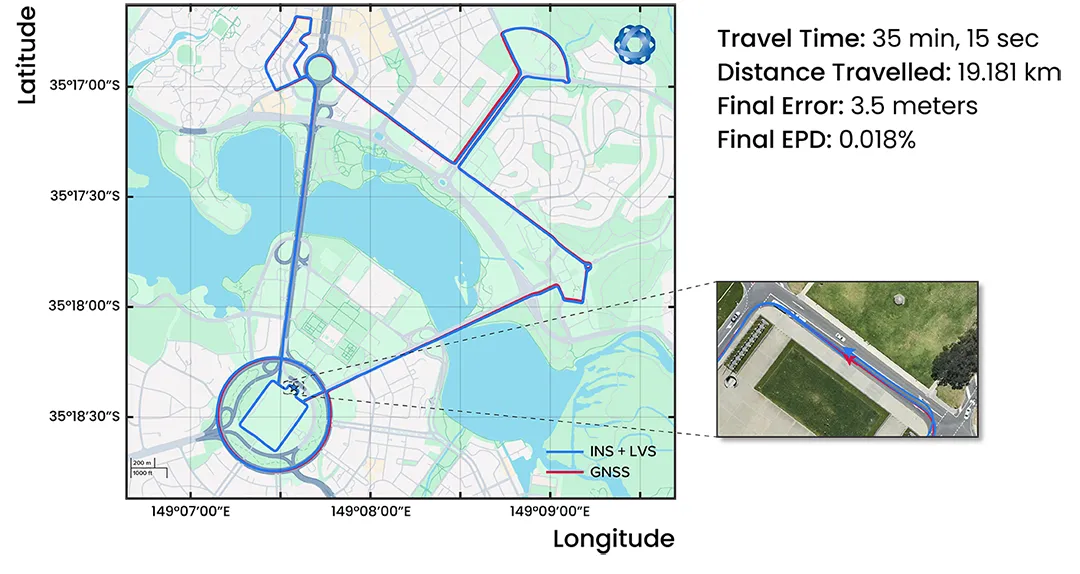
The below results are from a 19.2 km drive around the Parliamentary Triangle in Canberra. GNSS was not used at any point in the drive for heading or position. RTK GNSS is shown as the red line, while the hybrid system’s result is shown in blue.
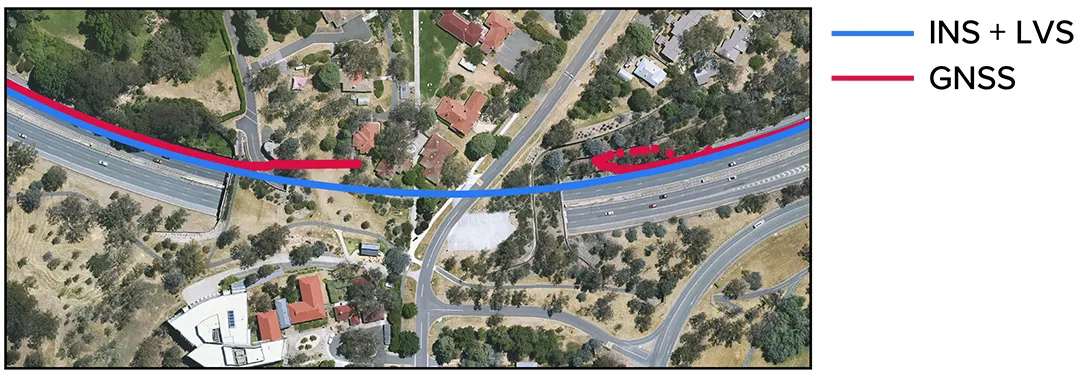
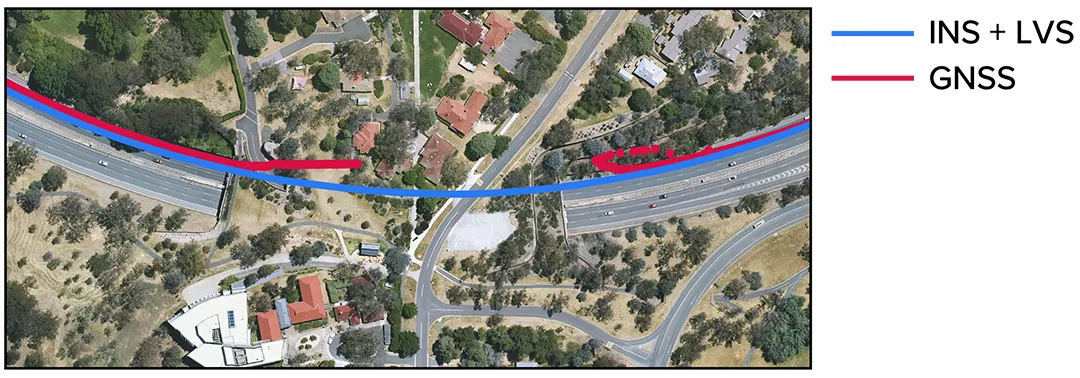
The figure below is a zoomed section from the first test drive, showing GNSS (red) drop out as the test vehicle drove through a tunnel, which completely denied the GNSS reference measurement. The hybrid system’s result can be seen in blue, showing it did not suffer from this error.
These drives were done repeatedly, demonstrating consistent and reliable results each time.
The hybrid system was also tested on a fixed-wing aircraft combined with a tactical-grade INS, demonstrating a final error per distance traveled of 0.045% over the course of a low-altitude flight over 545 km. These results demonstrate the system’s impressive ability to improve navigation performance of the INS in GNSS-denied or contested scenarios. For a more in-depth look into the technology, read the white paper here.
Commercializing space to Earth
LVS is a terrestrial adaptation of LUNA (Laser Unit for Navigation Aid), a space-grade navigation technology developed for autonomous lunar landings. LUNA enables reliable navigation in the harsh environment of space by providing precise three-dimensional velocity and altitude information relative to the Moon’s surface. The result of several years of research and development, LUNA is set to be demonstrated aboard Intuitive Machines’ Nova-C lander as part of NASA’s Commercial Lunar Payload Services (CLPS) program.
By leveraging the engineering insights gained from LUNA, LVS adapts space technology into an Earth-ready solution for terrestrial GNSS-denied navigation.
China’s BeiDou satellite navigation system has achieved major breakthroughs and in-depth applications across a wide of range of sectors, according to a white paper issued May 19 and reported by South China Morning Post.
The report was released by the Global Navigation Satellite System (GNSS) and Location Based Services (LBS) Association of China, a semi-official industry body. It reported that BeiDou cemented its leading position in the Chinese market in 2024. , as its economic footprint grew more than 7 percent and it expanded its compatibility to support a broader range of devices.
Key findings from the report:
BeiDou tracks locations more than 1 trillion times every day.
BeiDou drove a total of 575.8 billion yuan (US$79.9 billion) of economic output in 2024, up 7.39 percent year on year.
BeiDou is now compatible with 288 million smartphones, mostly produced by domestic brands like Huawei and Xiaomi.
China’s leading navigation apps – Baidu Maps and Amap – said they used BeiDou to guide users on journeys of a combined 4 billion kilometers per day.
To expand its reach in China’s consumer market, BeiDou is expanding its compatibility from smartphones and in-vehicle satellite navigation systems to wearables, drones, electric bikes and robots.
The China Satellite Navigation Office, aims to replace its existing constellation with new, more advanced satellites by 2035, with the next-gen satellites reportedly supporting real-time positioning accurate to within a centimetre.
The new satellites will provide precision positioning for deep-sea exploration and flights at altitudes far beyond those typically used by commercial aircraft, according to China’s media reports.
Artificial intelligence (AI) has become part of the daily lexicon, and an endless stream of media reports assert that AI either has affected or will affect most aspects of human life. What is AI and what are its components? How is it being used in GNSS technology? What is the near-term potential of AI in GNSS/PNT? These are weighty, evolving questions for which this column attempts an initial synthesis.
AI definitions and descriptions vary widely. One general and broad definition from IBM (2025) is “Artificial intelligence (AI) is technology that enables computers and machines to simulate human learning, comprehension, problem solving, decision-making, creativity and autonomy.” The idea of thinking machines (Turing, 1950) and the term “artificial intelligence” were introduced in the 1950s (McCarthy, 2007). The 1960s and 1970s saw the development of neural networks. The 1980s brought advances in neural network training and deep learning. The 1990s saw rapid advances in computing power. Big data and cloud computing developments in the 2000s allowed for the management and analysis of large datasets. The 2010s brought deep neural networks/deep learning, and the 2020s have seen the introduction and flourishing of large language models.
This column primarily focuses on the impacts that AI is directly having and could potentially have on GNSS hardware and PNT solutions, including receiver signal acquisition, measurement processing, position estimation, integrity and mitigation of jamming and spoofing. Due to space limitations, it will limit discussion to topics such as GNSS-based sensor fusion, navigation system routing, application-specific customizations, etc., all of which are undergoing significant AI-related infusions. A suitable guide to consider is the list of tasks for which evolving AI approaches can outperform existing methods in meaningful and efficient ways. For example, in error modeling or optimal estimation, can AI-based techniques fill gaps in non- or only partially-deterministic processes?
Essential
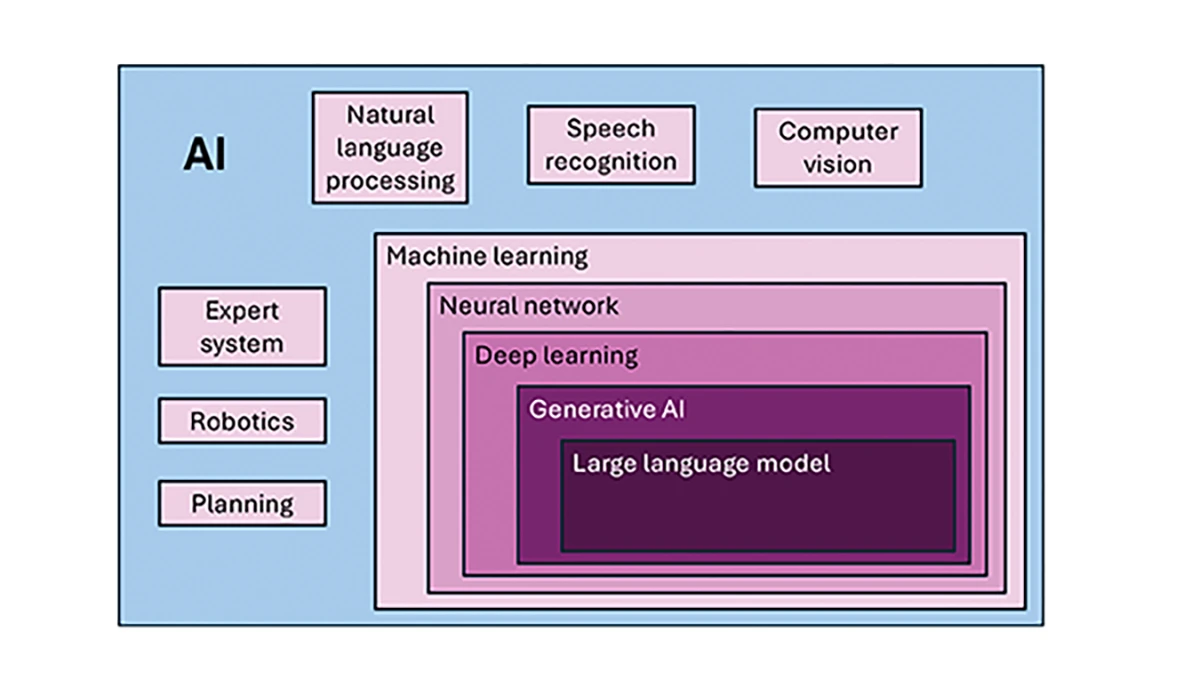
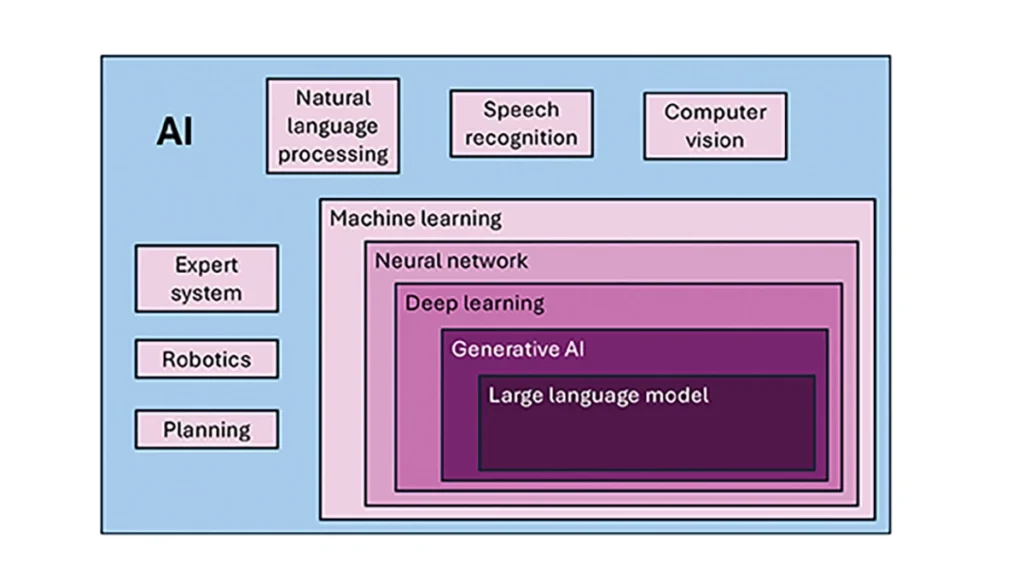
To investigate the current and potential uses of AI in GNSS, it is essential to define its components, especially as some terms are misused or conflated. The presented description is based on a wealth of Internet-based information, including from IBM (2025). Figure 1 illustrates the current broad concepts within, or subsets of, AI based on a synthesis of nomenclature used. In the figure, AI — defined here as a machine that exhibits human-like intelligence — is the superset. Within AI, there are many concepts or subsets that can be categorized, though they can overlap. There is perception intelligence, such as text and space recognition, and there is the broad area of machine learning.
Figure 1: Concepts within/subsets of AI.
Sophisticated processes have been developed and continue to rapidly evolve to give machines the ability to sense, learn and make decisions. Natural language processing (NLP) allows machines to recognize, understand and generate text following human language. Voice recognition is similar, in that the machine transcribes speech to text and back. Computer vision enables machines to interpret and analyze imagery. While robotics is a field of its own, within the superset of AI, it can be seen as an application of AI to motion. Planning refers to autonomously solving planning and scheduling problems. And expert system is the field of AI dedicated to simulating human expertise, judgment and behavior. All of these AI subsets are typically enhanced with machine learning (ML).
ML involves the development of algorithms and statistical models that can infer patterns (i.e., learn) from existing data without explicit instructions (i.e., rote training) and apply this knowledge to new data. Based on the learning approach, there are four types of machine learning algorithms: supervised, semi-supervised, unsupervised and reinforcement. (ML can also be classified by functionality.) Supervised learning uses manually labeled datasets to accurately train algorithms to classify data or predict outcomes. In semi-supervised learning and unsupervised learning, relationships are found with less or no explicit human interaction, respectively. Reinforcement learning combines these approaches with goal optimization. There are many types of ML techniques/algorithms, such as linear regression, logistic regression, decision trees, random forest, support vector machines, k-nearest neighbor and clustering, each designed for different types of problems and data.
Neural networks (NNs) or artificial neural networks are modeled after the human brain. A neural network model contains a given input layer and output layer, each with a set of nodes. These layers and nodes are interconnected with a set of hidden layers of nodes, with each node having a weight and bias, determined (i.e., estimated) based on the specified network inputs and outputs by utilizing one of a selection of optimization techniques. NNs can work well for tasks that involve identifying complex patterns and relationships given large amounts of data, though the details of specific parameter interrelationships cannot necessarily be determined by such models — therefore sometimes referred to as “black box” models. There are several types of neural networks, including convolutional NNs, long short-term memory networks, autoencoders, recurrent NNs, transformers, etc.
Deep learning refers to the depth of layers in a neural network. A deep learning model neural network contains at least three, but typically hundreds of hidden layers. Having many layers allows for unsupervised, fast and accurate identification of complex patterns and relationships. Generative AI can be described as deep learning models that generate new/original content, e.g., text, image or audio data through a variety of training, tuning and generation processes. Finally, large language models can read, understand and generate human language (refer to NLP), making use of all the functionality of ML.
Elements
How machine learning is used in GNSS
So, when should AI be used in GNSS/PNT tasks? A rudimentary answer is whenever AI can perform better (in some specified and measurable sense) than existing methods. The determination of this answer for a particular scenario requires research. From the descriptions of AI and its subsets, GNSS/PNT output is used in myriad AI applications such as sensor fusion, autonomous vehicle navigation, route planning, etc. However, it is primarily the ML subset of AI that is being researched for use in GNSS signal and measurement processing.
ML models can be categorized by their fundamental methodology, as either generative or discriminative, or by the tasks for which they are used: either regression or classification (IBM, 2025). Generative algorithms model the distribution of data points with the goal of predicting the joint probability of a data point appearing in a particular space, whereas discriminative algorithms model the boundaries between classes of data with the goal of predicting the conditional probability of a given data point being in a specific class. Regression models predict continuous values and are mainly used to determine the relationship between one or more independent variables and a dependent variable, whereas classification models predict discrete values and are mainly used to determine a category or class, e.g., binary or multi-class.
Siemuri et al. (2022) provide a comprehensive review of recent research (from 2020 through 2021) in which ML techniques are used in GNSS problem solving and provide a categorization of GNSS use cases. Relevant key findings include: 1) ML is proposed to increase GNSS/ PNT robustness under degraded signal environments; 2) more than 200 studies were assessed; 3) in most cases, the ML approaches outperformed (at varying levels of significance) the traditional GNSS models; and 4) industry adoption of ML in GNSS so far appears limited. The analysis found that neural networks were used in more than half of the studies (55%) — including some deep learning, while support vector machine and decision tree/random forest techniques were used in 19% and 10% of the studies, respectively. Use cases for machine learning in GNSS were categorized as: i) signal acquisition; ii) signal detection and classification; iii) Earth observation and monitoring; iv) navigation and positioning; v) denied environments and indoor navigation; vi) atmospheric effects; vii) spoofing and jamming; viii) GNSS/inertial integration; ix) satellite selection; and x) LEO satellite orbit determination and positioning.
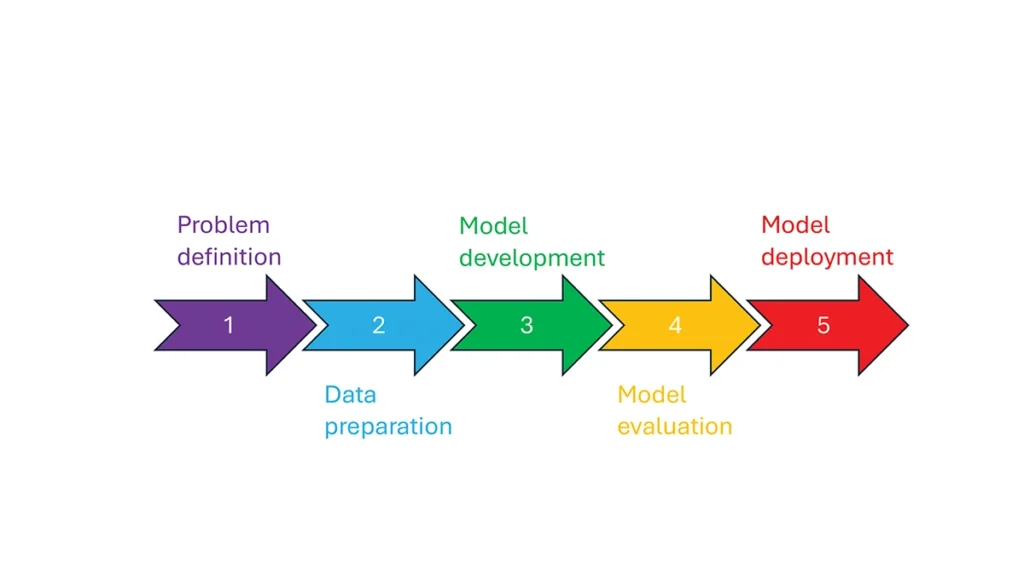
So, how is machine learning used in these GNSS/PNT use cases — and in general? How ML is applied can be described as a set of steps or a cycle with a varying number of components. Figure 2 presents a graphical synthesis from the literature, with a grouping of five core steps.
Step 1 — problem definition: understanding the problem(s) and goals, defining the available data, defining the problem inputs and outputs, determining the category of ML to use and selecting evaluation metrics.
Step 2 — data preparation: collecting the data, editing them, and labeling them if employing supervised classification.
Step 3 — model development: selecting the algorithm, selecting the model, building the model and training the model.
Step 4 — model evaluation: validating the model, tuning the model, analyzing the results, cross-validating the results and applying the evaluation metrics.
Step 5 — model deployment: finalizing the model, applying the model in prediction, and, if necessary, feeding back into the start of the cycle.
Figure 2 Steps in, or cycle of, machine learning implementation.
The scikit-learn (2025) library is a popular resource for Python-based ML information, tools and examples. An illustrative example of how ML can be used in GNSS for signal classification and measurement weighting is given by Li et al. (2023). The authors describe the process for designing the ML problem-solving scenario, selecting the models that are either of the regression or classification type and comparing the performance of many popular ML models to detect direct line-of-sight versus non-line-of-sight and multipath signals in urban environments. Note that most applications of machine learning in GNSS involve some form of supervised classification.
Initial and potential machine learning uses in GNSS
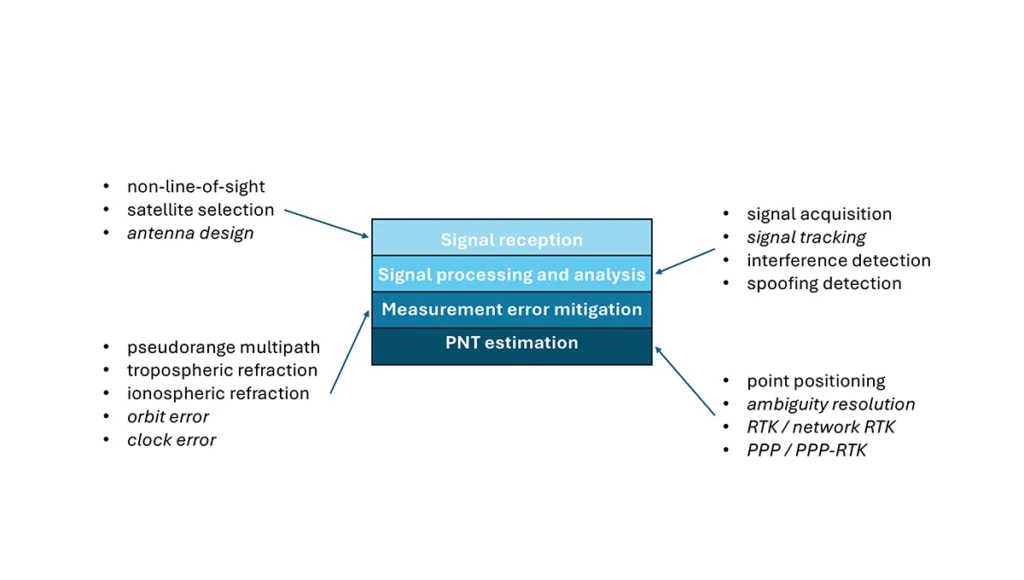
For this column, a brief synopsis is given of the use of machine learning in GNSS in the context of the application themes of signal reception, signal processing, measurement error mitigation and PNT estimation, as illustrated in Figure 3. Correspondingly, potential ML uses are also considered.
Figure 3: Application themes of machine learning in GNSS with initially studied and potential research areas.
Signal reception
Studies including Tsu (2017) and Li et al. (2023) have used various machine learning models to differentiate between line-of-sight, non-line-of-sight and pseudorange multipath GNSS signals in urban environments. Various input features, such as signal strength, are used to train models, resulting in majority accurate classification. ML has been used to optimize satellite selection (rather than using all available tracked satellites) for efficient PNT processing. Radio frequency hardware and software simulators can use ML to improve the realism of propagated signals in various environments and under different dynamics, including multipath, interference and spoofing. There is also the potential for ML to be used to improve antenna design, including for controlled radiation pattern antennas that generate one or multiple nulls.
Signal processing and analysis
Deep learning models have been used for signal acquisition and show improvement over current methods with simulated data (Borhani-Darian et al., 2023). There may be potential for the use of ML in signal tracking or in the design of new tracking algorithms and processes. Studies have shown that ML can be used to detect natural and intentional radio frequency interference. Various ML models have successfully been used to produce accurate classification of radio frequency interference jammer types (e.g., Morales Ferre et al., 2019). ML has also been used to detect signal spoofing with simulated and real signals with high levels of validation (e.g., Semanjski et al., 2020).
Measurement error mitigation
As GNSS multipath is a non-deterministic (and non-zero mean) process, it is a strong candidate for machine learning-based mitigation, especially meter-level pseudorange multipath (compared to centimeter-level carrier-phase multipath). Such studies, combined with non-line-of-sight classification, have been described in the previous section.
Initial investigations of the use of machine learning in the mitigation of tropospheric refraction appear promising (e.g., Łoś, et al., 2020). The wet tropospheric delay on GNSS signals is irregular, making it difficult to predict. Therefore, there is great potential for improved anomaly detection, refraction modeling and more accurate severe weather nowcasting.
As with tropospheric refraction, ionospheric refraction, while well understood, is difficult to model accurately, especially during periods of high solar activity. Machine learning has been shown to accurately detect anomalies and scintillation (e.g., Linty et al., 2018) and potentially for nowcasting.
There is the potential to improve GNSS satellite orbit and clock estimation with ML, as these are both well-defined processes, but also contain levels of process uncertainty. For example, it is usual to include once-per-orbital revolution empirical accelerations in orbit estimation states, and satellite force models can always be improved. Consequently, ML studies may aid in such GNSS network processing to improve the accuracy of real-time and post-processed correction products.
PNT estimation
Well-established optimal estimation techniques such as least-squares and Kalman filtering work extremely well for most GNSS/PNT estimation cases. However, hardware limitations and environmental conditions can lead to measurements not meeting the technical assumptions of these conventional approaches, e.g., the use of independent measurements, the absence of systematic errors, the absence of gross errors, the use of realistic measurement variances, etc. Deep learning models have the potential to improve GNSS point positioning (e.g., Kanhere et al., 2022) in test data, if poor model numerical conditioning, changing satellite visibility and model overfitting are managed. There is potential research in the use of machine learning methods to improve carrier-phase ambiguity resolution, and in the centimeter-level positioning techniques of real-time kinematic (RTK)/network RTK, and precise point positioning (PPP)/PPP-RTK.
Broader AI/ML use within GNSS-based PNT
Clearly, GNSS/PNT outputs are used in a broad spectrum of applications, for which AI and ML are currently being used or have the potential of being used to attain and enhance goals. Machine learning has been used to improve GNSS-derived position time series analysis for many Earth science applications, including in plate tectonics, tsunami monitoring, vulcanology, subsidence monitor, GNSS reference station monitoring, overall measurement integrity, etc. and in diverse GNSS-enabled techniques such as radio occultation and reflectometry (Siemuri et al., 2022).
ML has the potential to allow for improvements in sensor fusion, chief amongst these being GNSS/inertial measurement unit (IMU) integration. Improvements can be found in IMU calibration and in managing functional and dynamic mismodeling for specific user applications. Wider, multi-sensor fusion, such as for simultaneous location and mapping solutions, rely heavily on ML approaches, such as reinforcement learning.
Finally, GNSS-based PNT is used in most of the non-ML subsets of AI. GNSS-based position information is central to many outdoor robotics, planning and computer vision algorithms, providing either seeding localization information for other sensors or processes, or core position information for the overall AI-driven system.
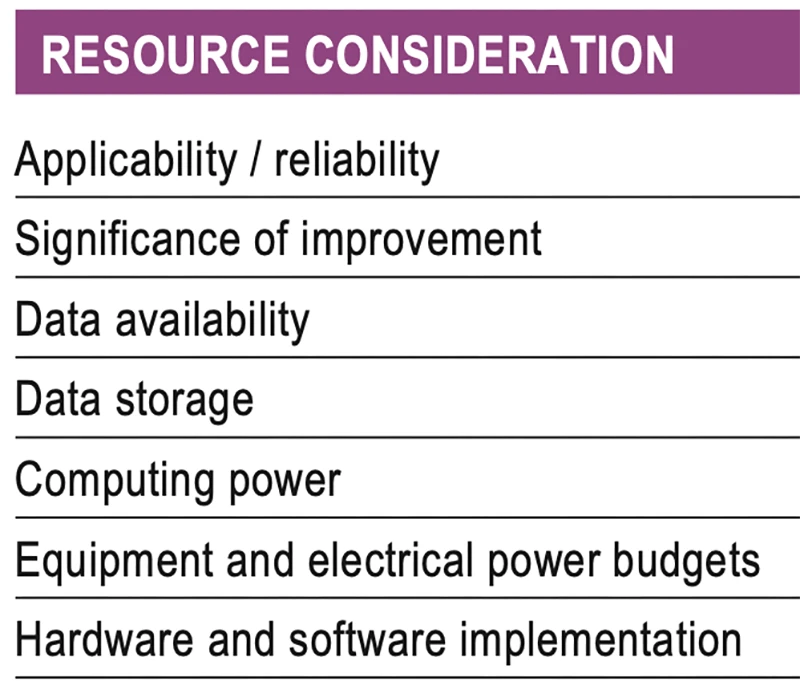
Machine learning resource considerations
As with all technology, a cost/benefit analysis is required when considering the application of ML in a specific GNSS use case. Table 1 summarizes the broad considerations. Can the problem at hand be reliability mitigated with ML, in the sense that there are complexities that are difficult or impossible to physically model, but sufficient patterns in the data to be modeled by ML? If ML can outperform a conventional approach using specified metrics, is the improvement significant to the user? Are there large enough, i.e., sufficient and varied, datasets to train a model for prediction over expected data variations? As most ML algorithms require large amounts of computing storage for large datasets, typically from data servers, can the necessary computing power be brought to bear? Similarly, given that most ML algorithms require large amounts of computing power for myriad computational operations, typically utilizing graphics processing units (GPUs), is such computing power available? As storage servers for large datasets and GPUs for processing are expensive and require large amounts of electrical power, are the financial and electrical power, environmental and security resources available? And finally, how practical is it to implement the ML model on user equipment or via servers?
Table 1 Resource considerations for machine learning use in GNSS.
Evolutionary
AI is a broad field that is rapidly developing and entering service in most technologies. While AI includes many subsets such as computer vision, natural language processing and robotics, the ML subset (which includes neural networks, deep learning and generative AI) has the most direct applicability to GNSS/PNT. Of the available ML models used in GNSS, most are supervised (i.e., they use labeled training data), and the majority use neural networks. Initial studies of applications such as signal classification and interference detection indicate that supervised ML models perform better than traditional approaches.
Many subsets of AI, such as computer vision and robotics, rely heavily on ML, while GNSS/PNT has only recently seen investigations in ML use. For many applications, it can be that conventional deterministic models, physics-based models or optimal estimation techniques work well and reach desired performance standards. However, as GNSS/PNT continues to trend to lower cost hardware, harsher environmental conditions and increasing safety-of-life usage, PNT outliers and corner cases grow in importance, and ML can potentially provide solutions, as outlined in Figure 3. These are the early days of investigating and applying ML in GNSS/PNT. To use ML or not to use ML — that is the question. There are many factors to consider, as described in Table 1. Performance improvements over current approaches and operational practicality (i.e., costs) will dictate ML adoption. Much more research is required in many GNSS/PNT applications, followed by significant wide-spread testing and tuning of developed ML models. It is difficult not to predict the near-term adoption of ML in at least some GNSS/PNT use cases, if they will benefit our daily lives. Look for future columns that will examine and investigate ML implementations in specific GNSS/PNT applications that prove its efficacy.