The United States Navy’s Naval Air Systems Command (NAVAIR) has awarded TrustPoint a $1.2 million Small Business Innovation Research Phase II contract. The funding supports the initial delivery and demonstration of TrustPoint’s C-band GNSS service-enabled receivers for the U.S. government. TrustPoint is collaborating with Hexagon U.S. Federal and NovAtel, both part of Hexagon.
This project combines TrustPoint’s C-band services with NovAtel’s GNSS receiver technology, aiming to advance resilient positioning, navigation and timing solutions for military use. The partnership draws on extensive experience in military-grade GNSS equipment and services, and represents a significant step in developing technology that can operate reliably in challenging operational environments.
The contract highlights the increasing importance of frequency and orbital diversity for future navigation and timing needs. With Hexagon as a key partner, TrustPoint is positioned to address the Department of Defense’s evolving requirements for assured PNT, supporting mission continuity even in contested environments
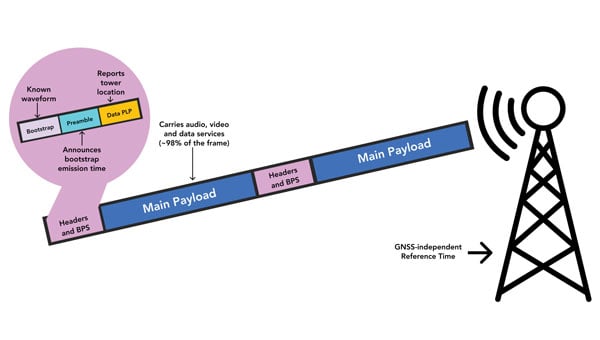
More than 20 years ago, in these pages, we referred to television broadcast signals as “signals of opportunity” that might be used for positioning, navigation and timing (PNT). Since then, several other signals with a different primary purpose have also been considered as sources of PNT, and some have been used routinely for years now, such as WiFi routers for indoor navigation. On Feb. 26, 2025, the National Association of Broadcasters (NAB) filed a petition for rulemaking with the Federal Communications Commission (FCC) for television to transition to a new standard, ATSC 3.0, that enables what they call Broadcast Positioning System (BPS), as a way to enhance GPS resiliency. I asked NAB’s chief technology officer and executive vice president, Sam Matheny, to answer a few questions about the organization’s proposal. In next month’s issue, we will present a different perspective on it.
Question: Briefly, what is the history of the relevant standards?
Answer: The Advanced Television Systems Committee (ATSC) is an international standards development organization. ATSC developed ATSC 3.0 as the “next-gen” standard, and the International Telecommunications Union (ITU) adopted it as a recommended digital broadcast standard in 2020. Broadcasters in the United States began experimental ATSC 3.0 transmissions in 2016, and there are currently more than 100 transmitters broadcasting in 80 markets. Other nations currently using or considering ATSC 3.0 include Brazil, India, South Korea, Canada, Mexico, Jamaica and Trinidad and Tobago. NAB’s petition to the FCC requests permission to fully transition to ATSC 3.0 by 2030.
Q: Briefly, what is the history of the BPS project/proposal?
A: BPS is a datacast application that uses ATSC 3.0. We at NAB authored a seminal paper on BPS in 2021 and built our first prototype in 2022. We put our second prototype on the air in 2023. We signed a Cooperative Research and Development Agreement (CRADA) with the National Institute of Standards and Technology (NIST) in 2024 and published our first joint paper earlier this year. The paper concludes that “the stability of BPS time transfer is comparable to or better than GNSS, making BPS a viable complementary PNT solution when GNSS is unavailable.”
Our petition to the FCC highlights a transition to ATSC 3.0 that enables the nationwide deployment of BPS.
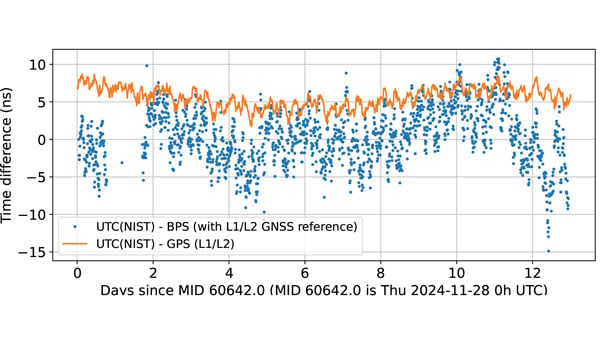
BPS time is comparable to dual band GPS (L1/L2) time. The data are recorded as 10-minute averages. (Graphic: National Association of Broadcasters)
Q: What is the motivation for broadcasters to implement BPS? What’s in it for them?
A: BPS will further secure television broadcasters’ role in the fabric of U.S. telecommunications. We also witnessed the innovation around GPS, with more than 7 billion GPS receivers being built into myriad devices. We’d like to see BPS experience similar innovation, which will bring new business opportunities. We believe that there is an opportunity for a public-private partnership with the government to deploy BPS for economic and national security.
Q: What have your tests so far shown regarding the timing accuracy of your signals? How much more R&D is required?
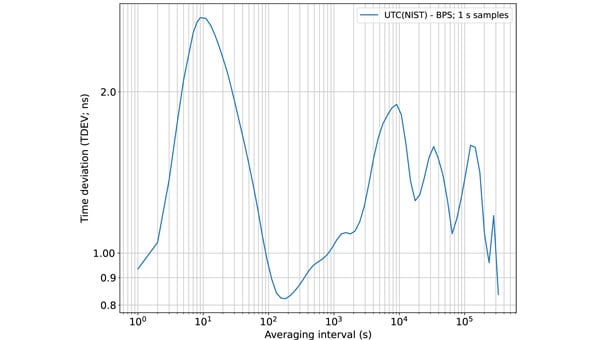
A: We’ve completed a wide variety of testing over the years, but probably of most interest is the work done with NIST. They ran common-view experiments using the BPS signal transmitted from KWGN, a TV station in Denver. Receivers were placed at two different facilities equipped with NIST timescale. Their Boulder facility is 30 km away with non-line-of-sight (NLOS) propagation, and their Fort Collins facility is 106 km away with line-of-sight propagation. A 21-day-long test showed that the time deviation (TDEV) statistics were better than 2 ns for all intervals. NIST also tested the stability of the NLOS signal alone at the Boulder facility and found that the TDEV statistics were better than 3 ns.
Q: How can BPS help improve GNSS resilience and integrity?
A: BPS functions completely independent of GNSS, so in the event of an acute GNSS disruption or catastrophic outage, BPS can be a resilient secondary source of timing for critical infrastructure (CI). Integrating BPS into CI applications also makes GPS a less attractive target for intentional disruption. Additionally, being independent means that BPS and GPS can work together in a hybrid mode, where, for example, BPS can help detect jamming and spoofing of GPS.
Time deviation (TDEV) statistics of BPS is less than 3 ns, even for the NLOS test scenario. (Graphic: National Association of Broadcasters))
Q: What are the main benefits of BPS?
A: The key benefits of BPS include:
Existing infrastructure: BPS leverages existing television transmission infrastructure making it low cost and easy to deploy. There are more than 1,700 full power TV stations on the air today. These stations, considered critical infrastructure, are designed to stay on the air on a 24 x 7 x 365 basis, including during emergencies.
Nationwide coverage: Television transmissions are “high-power/high-tower” signals that provide nationwide coverage. Their broadcast power can be up to 1 MW and from towers up to 2,000 feet tall. The signals can be received NLOS, including indoors. The strength of these signals makes them difficult to jam or spoof.
Frequency diversity: Television in the United States operates on 210 MHz of licensed spectrum divided into 35 6-MHz channels. There are multiple stations/channels in each market, which offer geographic diversity along with frequency diversity.
Passive receivers: BPS is a broadcast service, just like GPS, and supports an unlimited number of simultaneous users with no bottlenecks or two-way connectivity dependencies.
Standards-based: BPS is based on ATSC 3.0, an ITU-recommended digital terrestrial broadcast standard with the support of a global community and supply chain.
Independent: BPS operates completely independent of GNSS and is a self-synchronizing network that does not rely on Internet or cellular connectivity.
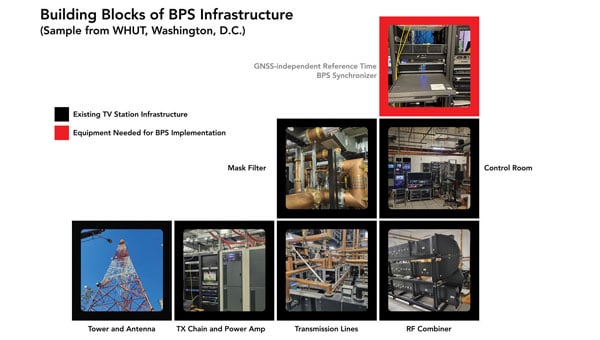
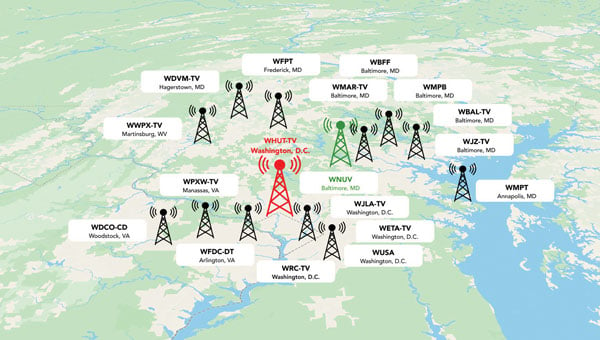
BPS Installation at WHUT. TV transmission infrastructure is already built out. Only a BPS synchronizer and a reference timing source need to be added. (Graphic: National Association of Broadcasters))
Q: What are the main initial use cases? What are some additional ones that might come later?
A: The initial use case is providing resilient time to CI, which includes the power grid, cellular communications, and financial and data centers. A 2019 NIST study estimated the economic risk of losing GPS at $1 billion a day, and in 2024 a National Security Space Association study said the impact of a disruption or loss would be incalculable, so addressing this CI need is vital. Longer term, we see hybrid applications where BPS and GPS are used together. BPS can be leveraged for GPS health monitoring, which could be especially useful for transportation systems and can help identify and mitigate compromised GPS service. Going further, we see applications for positioning and navigation, plus other data services such as AGPS, GPS validation and RTK.
Q: How will the BPS service be monitored after full deployment?
A: NAB has developed a cloud-based network operations center (NOC) to monitor the health of the BPS-enabled TV stations. As part of our leader-follower construct, TV stations in the BPS mesh network measure each other’s emissions and send the data to the NOC, which can identify any issues.
Q: Which television manufacturers have expressed interest so far?
A: Hisense, LG, Panasonic, Samsung, Sony and TCL are already selling NEXTGEN TV sets. It is important to note that these televisions don’t use BPS. They ignore the BPS data and pay attention to the audio and video payload. The reverse is true for a BPS receiver; it ignores the audio and video and simply uses the BPS data. Both services rely on ATSC 3.0, but they use different parts of the signal.
BPS leader-follower mesh network example. WHUT is configured as a leader tower, and WNUV is set up as a follower tower deriving traceable time from WHUT’s signal. At full deployment, the remaining 12 towers in the DC-Baltimore area can also follow WHUT. (Graphic: National Association of Broadcasters))
Q: Have you talked to any GNSS receiver manufacturers yet?
A: Yes, we have healthy interest from numerous receiver manufacturers. They see BPS as a nice addition to their product lineups. Conversations have focused on performance and integration.
Q: Are there any technical, commercial or legal arguments against BPS? Do you anticipate resistance to your proposal from any quarters?
A: We have not heard any such arguments against BPS. To the contrary, people have been intrigued and supportive of the concept. Recognizing that BPS requires transition to ATSC 3.0, some groups have expressed concerns over the television set upgrade cost for low-income viewers. However, ATSC 3.0 receiver accessories retail for less than $100 today, and prices will drop further with scale.
Q: How does your proposal address backward compatibility?
A: NAB’s petition calls for all television stations to transition to ATSC 3.0 and for all television sets to be equipped to receive ATSC 3.0. As mentioned earlier, millions of NEXTGEN TV sets are already being purchased, so our petition aligns with natural product replacement cycles, including low-cost converters for older TVs.
Q: What is your arrangement and division of labor with NIST?
A: Our CRADA with NIST also includes Nexstar, one of our members. Nexstar operates KWGN where we deployed BPS. NAB provided NIST with BPS receivers and technical support. NIST scientists then performed independent measurements and analysis of BPS using their own techniques and processes. It has been a great experience for us to engage with and learn from the team at NIST. The effort has taught us a great deal about PNT and the capabilities of BPS.
Q: Now that you have submitted your proposal to the FCC, what do you expect to be the timeline for approval, implementation and adoption?
A: The FCC follows a notice-and-comment process for adopting changes to its rules, which can take anywhere from several months to more than a year. The FCC previously convened the Future of Television Initiative to investigate issues associated with the transition, which should give us a bit of a head start. In NAB’s petition, we ask the FCC to establish a timeline that would have the top 55 television markets fully transitioned to ATSC 3.0 by 2028 and the remaining markets by 2030.
Q: How can the GNSS/PNT community help this project?
A: First, it can support the transition to ATSC 3.0 because BPS relies upon it. We need a full transition to recognize its potential. Next, it can continue to collaborate with us. We introduced BPS at the DOT Roundtable in 2022. Since then, we’ve collaborated with the PNT community on research, scientific papers, product design and deployments. We’ve built BPS together, and now we need to deploy it together.
The latest historic chapter in GNSS for space users was launched, as one would expect, at an Institute of Navigation (ION) GNSS+ conference — the one in Miami in 2019 — by a handful of technical and policy experts well positioned to “Go for the Gold” — GNSS on the moon! Thus, liquid refreshments in hand, the Lunar GNSS Receiver Experiment (LuGRE) concept was born, amongst excited discussion and scribbling on napkins by Oscar Pozzobon (Qascom), Joel Parker (NASA), Frank Bauer (NASA), Alberto Tuozzi (Agenzia Spaziale Italiana or ASI, Italian Space Agency), Lisa Valencia (NASA) and James “JJ” Miller (NASA).
Long before this productive, informal brainstorming session, global navigation satellite systems (GNSS), such as the U.S. GPS, were originally designed for use on or near Earth, providing positioning, navigation and timing (PNT) services up to an altitude of about 3,000 km (the GPS Terrestrial Service Volume). Over the decades, experimental missions pushed GNSS use higher, and by 2006, GPS specifications defined a Space Service Volume, extending GNSS services out to 36,000 km (geosynchronous orbit). NASA missions then deftly demonstrated GNSS utility well beyond Earth orbit — notably in 2019 with the Magnetospheric Multiscale Mission spacecraft formation, which successfully tracked GPS signals roughly 192,500 km from Earth, setting the world record for farthest and fastest reception of any GNSS signals in the space domain.
Building on this success, NASA proposed conducting the LuGRE in 2020 by using a combination of GPS and Europe’s Galileo signals at lunar distances. The flight opportunity for a lunar mission came through NASA’s new Commercial Lunar Payload Services (CLPS) initiative, and by early 2021, Firefly Aerospace was awarded the mission to carry LuGRE to the moon. The LuGRE team was very fortunate from the start, competing for and winning the last of 10 payload slots, and the only space operations flight demonstration amongst nine other science payloads focused more on assessing the lunar environment.
The progress of this initiative reflects a broader national and international push based on NASA’s role in implementing the 2021 U.S. Space Policy Directive-7, which directs NASA to work with the U.S. Space Force and other partners to extend GNSS capabilities farther into cislunar space to benefit both government and commercial users. Internationally, GNSS providers further cooperate through the UN-sponsored International Committee on GNSS to develop interoperable PNT standards for space users beyond Earth. So, ASI was a natural fit to become NASA’s international partner. The Italian GNSS company Qascom was awarded the receiver development, while the Polytechnic of Turin provided academic support. This historic groundwork has thus set the stage for the recent LuGRE mission to achieve several accomplishments in lunar navigation, breaking three world records in the process.
Mission overview: Blue Ghost Lander and CLPS
The LuGRE payload traveled to the moon aboard Blue Ghost Mission 1, a robotic lunar lander built by Firefly Aerospace under NASA’s CLPS program. CLPS, started in 2018, is a public-private partnership model through which NASA contracts commercial landers to deliver science and technology payloads to the lunar surface. Blue Ghost Mission 1 launched on Jan. 15, 2025, via a SpaceX Falcon 9 rocket and touched down on March 2, 2025. This made Firefly the first U.S. commercial company to successfully land on the moon upright, delivering 10 NASA-sponsored payloads, including LuGRE. The lander targeted a site near Mons Latreille in Mare Crisium, achieving a precision landing within ~100 m of the aim point. Built as a solar-powered lander about 2 m tall and 3.5 m wide, Blue Ghost was designed for a mission duration of one lunar day (~14 Earth days). By leveraging CLPS, NASA rapidly deployed LuGRE and other instruments, demonstrating the effectiveness of commercial partnerships in advancing lunar exploration. Blue Ghost’s successful landing and operations validated this approach and set the stage for upcoming CLPS missions in support of Artemis.
The LuGRE payload: Objectives and components
LuGRE is a technology demonstration aimed at determining whether Earth-originated GNSS signals can be reliably received and used for navigation at the moon’s distance. The payload was jointly developed by NASA and ASI with engineering by Qascom. Hardware on LuGRE includes a specialized weak-signal GNSS receiver, a high-gain L-band patch antenna array with RF filtering and a low-noise amplifier. This design allows it to track faint GPS and Galileo signals nearly 400,000 km from their transmitters. LuGRE specifically listens on multiple frequencies — GPS L1 and L5, and Galileo E1 and E5a — to maximize signal acquisition opportunities. The experiment’s objectives are threefold: (1) acquire and characterize GNSS signals in lunar orbit and on the surface, (2) demonstrate navigation fixes (position/time) using those signals at the moon, and (3) return data to inform the development of future lunar-specific GNSS receivers. All three of LuGRE’s objectives were met. During the mission, LuGRE began collecting and processing data en route to the moon (during a ~45-day transit) and also on the lunar surface after landing. As one of the first demonstrations of GNSS use on another world, LuGRE set out to prove that combined GPS/Galileo signals could enable autonomous navigation for spacecraft far beyond Earth.
A SpaceX Falcon 9 rocket carrying Firefly Aerospace’s Blue Ghost Mission 1 lander prepares for a launch to the moon on Jan. 14, 2025, from Launch Complex 39A at the agency’s Kennedy Space Center in Florida. (Photo: NASA / Kim Shiflett)
Benefits of GNSS for lunar PNT
If proven reliable, GNSS-based navigation at the moon offers significant benefits for future lunar missions. First, it provides a common PNT framework for lunar explorers, akin to GPS on Earth, enabling precise real-time positioning and time synchronization for astronauts and robotic systems. This could allow lunar crews and rovers to navigate autonomously across the surface without constant ground support, reducing astronaut workload and dependence on Earth-based tracking. Accurate GNSS-derived position data improves safety and efficiency — for example, helping rovers avoid hazards and chart optimal routes or aiding astronauts in pinpointing resources, such as water, ice or scientific targets. Using existing GNSS signals also means that missions might rely less on cumbersome radio tracking from Earth or lunar beacons, simplifying mission operations.
In the long run, GNSS technology can support the development of lunar infrastructure: future base camps, power stations and landing pads could all reference a shared navigation grid, much as terrestrial infrastructure does. Additionally, leveraging well-known GPS/Galileo signals could reduce costs and technical risks, supplementing a proposed new lunar navigation satellite network.
LuGRE’s results have affirmed these possibilities. During transit, LuGRE broke records by tracking signals at 395,900 km out in lunar orbit, proving multi-constellation GNSS can aid navigation to and around the moon. Shortly after landing, it further demonstrated an autonomous GNSS navigation fix on the lunar surface, 362,100 km from Earth. These achievements suggest that even existing Earth-centric satnav can be extended to serve lunar exploration, a promising development for upcoming Artemis endeavors.
Challenges of GNSS reception on the moon
Adapting GNSS to the lunar environment is challenging. The main difficulty is the weakness of signals by the time they reach the moon. GNSS satellites orbit around 20,000 km from Earth, beaming most of their signal power toward Earth’s surface. At nearly 10 times that distance, only the spillover (side-lobe) signals reach the moon, arriving attenuated and sparse. This necessitates high-sensitivity receivers and high-gain antennas (such as LuGRE’s) to even detect the signals, along with sophisticated algorithms to pull meaningful data from the noise. The geometry and coverage also pose issues: a receiver on the moon will often see a limited number of GNSS satellites above its horizon, potentially affecting the accuracy and availability of navigation fixes. Local lunar conditions add further complications. The moon’s lack of atmosphere means no ionospheric delay, which is a positive for signal clarity. However, it also means that there is nothing to refract or scatter signals over the horizon — thus, terrain plays a crucial role. Rugged topography (mountains, crater rims) can block line-of-sight to GNSS satellites, and deep craters or polar shadowed regions might have very poor reception.
The pervasive lunar dust (regolith) can also be problematic because it may coat antenna surfaces or contribute electromagnetic noise, especially during landings or surface activities. These factors require advanced processing techniques and possibly integrating GNSS with other sensors to achieve reliable navigation. LuGRE’s design and operations were tailored to confront these challenges. For instance, using dual constellations doubles the pool of satellites and signals available, and collecting data both in orbit and on the surface helps characterize how signal quality changes in different lunar conditions. The knowledge gained will guide the development of next-generation lunar GNSS receivers with improved robustness against weak signals and intermittent coverage.
Firefly aerospace’s Blue Ghost Mission 1 lander is carrying 10 NASA science and technology instruments to the moon as part of NASA’s CLPS initiative and Artemis campaign. (Photo: Firefly Aerospace)
Implications for Artemis and deep space navigation
LuGRE’s success is a proof of concept that navigation aids from Earth can directly support moon missions. This is of immediate relevance to NASA’s Artemis program, which aims to return humans to the moon and establish a sustained presence there. Artemis crewed vehicles (such as the Orion spacecraft) and the planned Gateway lunar station could potentially use GNSS signals during transit or in lunar orbit to autonomously determine their trajectories. On the surface, future Artemis astronauts and rovers could carry GNSS-enabled devices to know their precise location without relying solely on Earth-based tracking. This capability will become increasingly important as activities expand — from pinpoint landing of resupply craft, to coordinating lunar base operations to enabling the first long-distance treks by crew or robots on the moon.
By proving GPS/Galileo usability at the moon, LuGRE also paves the way for establishing a standardized lunar reference frame tied to existing GNSS, which all international partners can use for joint operations. In a broader sense, LuGRE is a stepping-stone toward more advanced navigation systems in deep space. It demonstrates techniques (such as combining multiple GNSS constellations and using high-sensitivity receivers) that could inform navigation around Mars or other distant targets. While Earth’s GNSS signals won’t reach Mars with useful strength, the lessons learned can drive the design of Mars-orbiting navigation satellites or better onboard autonomous nav systems for deep-space probes. In essence, the experiment is accelerating the development of a GPS-like interplanetary navigation capability, crucial for humanity’s expansion deeper into the solar system.
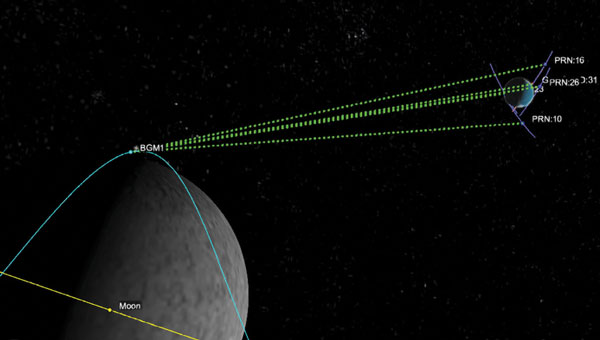
A Graphic representation of the relative geometry of Earth-moon-acquired GNSS satellites. (Photo: Agenzia Sapaziale Italiana)
Policy and international collaboration
The LuGRE mission exemplifies how international and commercial partnerships are shaping the future of space exploration. It was born out of a long-running collaboration between NASA’s Space Communications and Navigation program and ASI, reflecting a shared strategic interest in extending GNSS interoperability to the moon and beyond. The receiver hardware was developed by Qascom with academic support from Politecnico di Torino, underlining the role of industry and academia in innovation.
This NASA-ASI partnership built on earlier joint projects, such as GNSS receiver experiments on the ISS and suborbital flights, which tested using both GPS and Galileo for space navigation. Europe’s Galileo system, in particular, is a full partner in LuGRE. Its inclusion alongside GPS ensures that the experiment benefits from multi-constellation redundancy and also sends a message of GNSS interoperability, a key principle endorsed by the International Committee on GNSS. On the policy front, the mission aligns with U.S. space policy goals to develop services in cislunar space and encourages momentum in international standardization of lunar PNT frameworks.
Data from LuGRE will be made public, contributing to global research and possibly the drafting of new standards for lunar navigation that any nation’s spacecraft can adopt. The CLPS program itself, which enabled LuGRE’s delivery, represents a policy shift toward commercial sourcing of lunar services — fostering a market where companies such as Firefly, intuitive Machines, Astrobotic and others compete and cooperate to advance lunar science. As NASA leads the Artemis coalition with agencies from Europe, Asia and beyond, the LuGRE experiment offers a tangible product of cooperation: a foundation for shared navigation infrastructure at the moon. This collaborative, forward-looking approach will be critical as humanity returns to the moon not just to visit, but to stay.
Conclusion
LuGRE on Firefly’s Blue Ghost lander has marked a milestone in space exploration: it demonstrated for the first time that navigational signals conceived for Earth can be harnessed on the lunar surface. By uniting cutting-edge technical work (in receivers and antennas) with visionary policy support (via NASA’s CLPS and international GNSS cooperation), LuGRE showcases a path toward robust, autonomous navigation for the Artemis generation of missions. Achieving a GPS/Galileo fix on the moon is more than a symbolic first — it is a practical step toward a future where astronauts and robots navigate the moon — and one day Mars — with the same confidence as we do on Earth. The lessons from LuGRE will inform how we guide our spacecraft across the cislunar void, how we set up the positioning networks of tomorrow’s lunar bases and how nations cooperating can build the navigation backbone for a new era of deep-space exploration. In short, LuGRE has opened the door for GNSS to become an integral part of the lunar toolkit, blending technology and policy into a giant leap for navigation beyond Earth.
The U.S. Space Force’s Space Systems Command and Space Operations Command are preparing to launch the National Security Space Launch GPS III-7 mission, designated Space Vehicle 08, aboard a SpaceX Falcon 9 rocket. The launch is planned to take place from Space Launch Complex 40 at Cape Canaveral Space Force Station, Florida, no earlier than late May 2025.
This mission follows the successful Rapid Response Trailblazer launch in December 2024 and represents another accelerated effort. It involves a coordinated operation across multiple Space Force organizations to retrieve a GPS III satellite from storage, integrate it with the launch vehicle, and prepare it for launch on a compressed timeline.
The GPS III satellite is equipped with M-Code technology, which offers three times greater accuracy and eight times more resistance to jamming compared to earlier systems. This capability aims to enhance Precision, Navigation, and Timing services for the Joint Force, ensuring modernized support for military operations.
This effort builds on lessons learned from the previous Rapid Response Trailblazer mission and demonstrates the Space Force’s ability to reduce standard launch preparation timelines. While such preparations typically require up to 24 months, this mission is set to be completed within three months.
Mission Delta 31 of Space Operations Command is overseeing pre-launch processing in collaboration with Lockheed Martin in Colorado. On April 2, 2025, the satellite was transported to Florida aboard a U.S. Air Force C-17 Globemaster III and is now undergoing final preparations for launch. Col. Andrew Menschner, commander of Mission Delta 31, emphasized the teamwork involved in rapidly deploying an M-Code-capable satellite and advancing traditional launch timelines.
Key aspects of this mission include space vehicle-to-launch vehicle integration, satellite control preparation, and expedited contracting efforts.
The satellite is named in honor of Katherine Johnson, whose mathematical contributions were pivotal to early U.S. spaceflight missions. Once operational, it will enhance communication capabilities critical to national security and align with the Secretary of Defense’s strategic objectives by supporting military readiness with anti-jamming technology.
On March 27, 2025, the Federal Communications Commission (FCC) launched a proceeding on commercial technologies that would complement GPS. “Although GPS is indispensable to America’s economic and national security, it represents a single point of failure that can be vulnerable to disruption or manipulation by our adversaries,” said the FCC’s announcement, highlighting the federal government’s bipartisan call to develop complementary systems that provide positioning, navigation and timing (PNT) data to to better achieve PNT resilience nationwide and protect America’s economic and national security.
The Security Industry Association (SIA) commends the FCC’s commitment to protecting America’s economic and national security and exploring available PNT options. We believe the docket will show that there is a wide array of PNT technologies that can complement to GPS, and we look forward to providing information to the Commission about tradeoffs among these emerging PNT offerings and encouraging the Commission to avoid taking action that could disproportionately disrupt valuable public safety technologies.
One company, the for-profit entity NextNav, has petitioned the FCC to reconfigure the 902-928 MHz band (the Lower 900 MHz frequency) and grant it a nationwide license for 15 MHz of spectrum so it can establish a 5G terrestrial-based PNT network. NextNav also seeks the removal of the current requirement that it not cause unacceptable levels of interference to Part 15 devices. These devices include low-power, radio frequency (RF) devices ranging from consumer electronics and appliances to wireless alarm systems, smart home equipment, electronic access control devices and a wide range of devices used to increase economic productivity and efficiency, bolster safety, deliver innovation and provide other important benefits to consumers. This proposal has a dangerous likelihood of causing significant interference in the band that would be adverse to the public interest and threaten public safety.
The Lower 900 MHz band is vital for millions of security cameras, including popular models used in homes and small businesses. These devices are essential for protecting homes, preventing package theft and home intrusions, ensuring children’s safety and aiding law enforcement by capturing criminal activity. The changes proposed by NextNav would likely force these incumbent users into a shared portion of spectrum that is almost 60% smaller than the current Lower 900 MHz band — crowding that will cause many devices to stop operating reliably, compromising Americans’ safety and the security of our facilities and communities, and will be exacerbated by the growing concentration of devices using new technologies that require more spectrum bandwidth.
Another important service likely to be disrupted by the proposed band restructuring would be Z-Wave technologies. Z-Wave technology enables comprehensive home automation and security solutions —such as smart locks, thermostats and security systems — to integrate seamlessly with various smart home devices, while preserving advanced security features such as encrypted communication and secure inclusion. Z-Wave devices are not designed to withstand interference from fixed and/or mobile devices operating at commercial macro power limits and out-of-band emission limits, such as those in NextNav’s proposed high-power operations.
Additionally, millions of electronic access control and other wireless connected devices that are now in use in residential, institutional, commercial and government buildings across the United States would be impacted. The interference generated from NextNav’s higher-power communications would significantly impact the reliability of these important safety and security products and ecosystems, effectively making them unusable in the same spectrum.
In addition to these public safety and security uses, more critical systems that could be disrupted include:
Municipal infrastructure, including such systems as traffic control, street lighting, weather monitors and flood warning systems that are deployed in this band to make communities safer and more energy efficient.
Critical infrastructure, including utilities’ use of the band for remote monitoring and management of power, gas and water distribution networks.
Railroad operations and safety, including the Automatic Equipment Identification network that enables tracking of rail cars and equipment, as well as essential traffic control, sensors and other devices necessary for operational safety and efficiency.
Highway infrastructure and tolling, including the operation of electronic tolling systems, such as E-ZPass and other similar toll collection systems.
Retail, manufacturing and supply chain operations, including building control systems, tank and leak monitoring system and inventory control systems.
Agriculture solutions used for connecting modern farms’ Internet of Things devices and equipment to keep our farms connected.
As other concerned parties have pointed out, there are a number of existing backup GPS options available to establish a terrestrial PNT without any reallocation of spectrum. While a backup GPS system is ultimately necessary, the other solutions that would be much less disruptive. The tradeoffs required by implementing the NextNav proposal are simply not worth the risk to our nation’s security and safety.
Thales Alenia Space — a joint venture between Thales and Leonardo — has secured a €51 million ($56 million) contract from the European Union Agency for the Space Programme (EUSPA) to extend the operational life of the European Satellite-Based Augmentation System (EGNOS).
Named Life Extension Phase 1 (LIFEX), this contract will ensure that EGNOS V2 continues to provide reliable, secure and high-performance navigation services for Europe’s aviation, maritime, land transport, mapping and agricultural sectors beyond 2028.
EGNOS system is designed to enhance the accuracy, reliability and integrity of positioning signals by improving the performance of GNSS, such as GPS and, in the future, Galileo. As part of this contract, Thales Alenia Space will address EGNOS V2 critical system upgrades and infrastructure improvements, reinforcing the system’s resilience and operational durability. These updates will focus on enhancing security measures, modernizing components, and ensuring the ongoing reliability of EGNOS’s Safety of Life Service, which plays a key role in aviation, enabling accurate approaches at European airports without requiring ground guidance systems. Operational since 2011, this service has significantly improved operational safety and efficiency for the greater benefit of European operators.
Sierra Space has successfully demonstrated its Resilient GPS (R-GPS) technology for the U.S. Space Force (USSF). This milestone, achieved in collaboration with General Dynamics Mission Systems, involved generating all GPS navigation signals required for the R-GPS mission. The technology seeks to address the growing need for resilient GPS systems capable of countering threats such as jamming and spoofing, which pose risks to the current GPS infrastructure.
GPS technology is integral to modern life, supporting civilian applications from smartphone navigation to critical military operations. However, as adversarial threats become increasingly advanced, there is a pressing need to enhance GPS resilience. To tackle this challenge, the USSF’s Quick Start program is focused on integrating smaller, cost-effective satellites into the existing GPS framework. These satellites would provide a rapidly deployable layer of protection against emerging threats, according to the USSF.
The demonstration evaluated hardware, firmware, and software performance, including the generation of P(Y), M-code and C/A signals at L1 and L2 frequencies. These capabilities ensure that R-GPS satellites can produce accurate and secure navigation signals compatible with devices used globally.
Sierra Space was awarded an R-GPS contract by the USSF Space Systems Command in September 2024 to develop design concepts for smaller and more affordable satellites. Following an internal Systems Requirements Review later that year, the company has now demonstrated its technological capabilities within months of the program’s inception.
The Federal Communications Commission (FCC) has issued a Notice of Inquiry (NOI) seeking public input on positioning, navigation and timing (PNT) systems and policies. While GPS is crucial for the United States’ economic and national security, its dependency as a single point of failure renders it vulnerable to disruption or manipulation by adversaries. Recognizing this vulnerability, leaders such as President Trump, Chairman Cruz, and Senator Markey have advocated for developing alternative systems to ensure resilient PNT capabilities.
PNT data is integral to countless military, public safety, agricultural, and commercial activities. Given the dependence of the American economy and national security on GPS as the sole PNT source, the agency states that the U.S. government is prioritizing efforts to create robust backup systems that can safeguard essential functions in the event of GPS signal disruptions.
The FCC’s NOI examines how the agency can foster the development of alternative and complementary PNT. It seeks feedback on various emerging PNT technologies being developed by broadcasters, wireless operators, satellite constellations and startups utilizing FCC-licensed spectrum. The inquiry also addresses tradeoffs among these technologies based on performance, scalability, geographic coverage, durability, cost and commercialization potential.
The Commission aims to establish a comprehensive record to guide its actions in enhancing GPS resilience and promoting alternative PNT solutions. Potential measures include regulatory changes, public-private partnerships, testbeds, Innovation Zones and other initiatives.
Two PNT-related petitions are currently under FCC consideration. NextNav has proposed allocating approximately $5 billion worth of spectrum to collaborate with telecom providers in establishing a PNT network. Meanwhile, the National Association of Broadcasters (NAB) has suggested adopting a new TV signal format capable of transmitting PNT information without requesting additional spectrum allocation. Insights from the NOI will help inform decisions on these proposals.
The FCC’s inquiry reflects growing concerns about reliance on GPS as a single system for PNT data. By fostering alternatives like terrestrial networks or broadcast-based solutions such as NAB’s Broadcast Positioning System, the Commission seeks to strengthen national resilience against potential disruptions to critical infrastructure and services.
All three organizations are United Nations agencies and have previously issued similar statements independently. This is the first time they have spoken on this in one voice.
In 2020, ICAO issued a letter to all member states urging them to “strengthen CNS systems resilience and mitigate interference to GNSS.” It contained 13 recommendations resulting from three different work streams within the organization. The last of the recommendations was “… to support the multi-disciplinary development of alternative positioning, navigation and timing (APNT) strategy and solutions to complement the use of GNSS in aviation in coordination with ICAO and airspace users.”
In 201, IMO issued a circular on deliberate GNSS interference.. It called on nations to prevent interfering transmissions coming from their territories, issue warnings about known interference, and consider taking actions to prevent unauthorized interfering transmissions.
This ITU circular urged nations to “address the critical issue” by:
Reinforcing navigation systems’ resilience to interference.
Increasing collaboration between radio regulatory and enforcement authorities.
Reinforcing civil-military coordination to address interference risks associated with RNSS testing and conflict zones.
Increase coordination between aviation, military and radio-regulatory authorities.
Retain essential conventional navigation infrastructure for contingency support in case of RNSS outages and develop mitigation techniques for service loss.
A resolution by ITU’s 2023 World Radiocommunications Conference echoed similar themes. Still, it was criticized because its cautions and prohibitions came with the caveat, stating “…without prejudice to the right of administrations to deny access to the RNSS, for security or defense purposes.”
Many observers opined that there are few reasons for nations to interfere with GNSS other than security or defense concerns, which allows malicious actors to have carte blanche. Furthermore, it was suggested that the resolution might have included language to ensure that security and defense-related disruptions do not extend beyond a nation’s borders or similar provisions.
While no specific events are cited in the statement as motivating its publication, the death on Christmas Day of thirty-nine people aboard an Azerbaijan Airlines flight could have been the reason. The aircraft was approaching a Russian airport during an intentional interference event and was apparently misidentified by Russian forces. It was subsequently damaged by ground fire and crash-landed in Kazakhstan.
The recent joint statement cites, among other international agreements and actions, the ITU Constitution, which says, “All stations, whatever their purpose, must be established and operated in such a manner as not to cause harmful interference to the radio services or communications of other Member States.”
The joint statement concludes with:
Therefore, ITU, ICAO and IMO jointly and urgently call on their respective Member States to:
Protect the RNSS from transmissions that can adversely cause harmful interference, degrading, interrupting, or misleading signals used for civilian and humanitarian purposes.
Reinforce the resilience of the systems that rely on RNSS for navigation, positioning, and timing in relation to this type of interference.
Retain sufficient conventional navigation infrastructure for contingency support in case of RNSS outages and misleading signals, and develop mitigation techniques for loss of services.
Increase collaboration between radio regulatory, civil aviation, maritime, defense and enforcement authorities.
Report cases of harmful interference affecting RNSS to the appropriate telecommunication, aeronautical, and maritime authorities and the ITU Radiocommunications Bureau to enable the monitoring of the situation.
The United Nations and its agencies are collaborative bodies that operate by consensus and through the cooperation of members. As such, they have no ability to enforce standards or compel compliance with recommendations.
Since the dawn of GPS, researchers have worked to improve the accuracy of estimated positioning, navigation and timing (PNT) from the receiver-derived pseudorange, carrier-phase and Doppler measurements. While the pseudorange-based accuracy of standard point positioning (SPP) at the level of 1s to 10s of meters sufficed for most users, carrier-phase-based relative positioning, real-time kinematic (RTK), network RTK (NRTK) and precise point positioning (PPP) measurement processing techniques were developed to provide decimeter-to-centimeter-level PNT under various constraints. Of these approaches, PPP — generally based on the state-space reduction of measurement errors to a single GNSS receiver from a wide area calibration network — has evolved dramatically. Why should readers read this article, as PPP has been around for some two decades? Well, some communities may consider old performance specifications of conventional/classical PPP, a rather niche technology, for static use with post-processing of measurements, resulting in tens of minutes for solution convergence to the decimeter level. However, there have been many performance advances, with more coming, affecting who uses the technology and how.
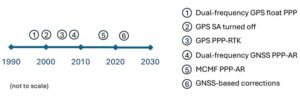
Figure 1: Timeline of PPP evolution.
Figure 1 illustrates the timeline of PPP evolution, from:
The development of the original technique in the late 1990s to reduce static GPS network measurement processing load.
The removal of GPS Selective Availability (SA), simplifying precise satellite clock prediction.
The development of PPP-RTK, in which regional RTK-derived corrections are used to reduce position convergence time and increase accuracy.
Successful isolation of PPP GPS dual-frequency carrier-phase ambiguities to increase accuracy.
Full multi-constellation, multi-frequency (MCMF) processing to greatly reduce position convergence time.
The introduction of GNSS constellation provider corrections. (Individual advances will be discussed in the Elements section.)
From initial scientific uses to becoming the commercial standard in remote areas or regions with limited GNSS terrestrial infrastructure, these research contributions are leading to ubiquitous open sky decimeter to centimeter-level positioning with a range of available corrections, increasing accuracy and reducing initial convergence for more applications.
Essentials
In the late 1990s, to improve positioning accuracy over SPP and avoid the heavy computational burden of network-adjusted relative positioning processing between many receivers, PPP algorithms (detailed in the Elements section) were formulated with undifferenced measurements between tracked satellites and a single receiver (Zumberge et al. 1997). Both pseudorange and carrier-phase measurements are utilized, with the former presenting many decimeter-level references and the latter ambiguous centimeter-level ranging. By filtering continuously tracked measurements over time, decimeter- to centimeter-level positioning is possible, as the state terms, including real-valued estimates of biased carrier-phase ambiguity terms — resulting in tens of minutes to hours of initial convergence time. This approach represents Hatch filtering in the position state rather than the observation domain. Key to PPP is the use of precise satellite orbit and clock estimates derived from a global reference network, which can receive measurements from an entire GNSS constellation. Additionally, to maximize performance, remaining error sources are modeled or estimated. While PPP was initially not as accurate as RTK and, more importantly, took tens of minutes to hours to attain solution convergence, the technique did not have the terrestrial infrastructure constraints of RTK or network RTK, which require reference receivers ~10 km to 15 km and ~75 km away, respectively. Once GPS Selective Availability was turned off in 2000, GPS satellite clock modeling became simpler and more accurate, and scientific and commercial PPP solutions quickly became the standard measurement processing technique for applications requiring decimeter-level accuracy in remote areas or places where it was not economically viable to install (an) RTK base station(s).
In the 2000s, two different approaches were developed to deal with the shortcomings of PPP: PPP-RTK and PPP-AR. In PPP-RTK, state space corrections from a regional NRTK solution are efficiently transmitted and applied as PPP corrections. As NRTK resolves carrier-phase ambiguities and estimates local atmospheric (ionospheric and tropospheric) refraction and reference station position all in a least-squares sense, PPP-RTK can produce centimeter-level positioning in seconds within a reference station network, where stations can be tens to hundreds of kilometers apart. In PPP-AR, the ionosphere-free linear combination of dual-frequency pseudorange and carrier-phase measurements is not employed; rather, the uncombined version, and the pseudorange and carrier-phase observation models, are extended to include and isolate satellite and receiver fractional carrier-phase biases, allowing PPP ambiguity resolution (AR) to integers with additional satellite code and phase biases from the network solution and between satellite single-differencing. Both approaches are having significant scientific and commercial success.
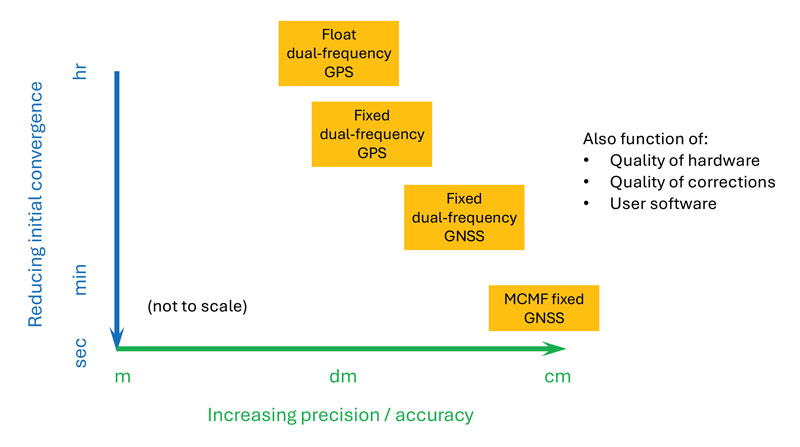
Figure 2: PPP and PPP-AR technology evolution in terms of accuracy versus convergence time.
Unlike RTK, which has the benefit of significant additional calibration information from the reference station, PPP(-AR) must rely only on satellite-based corrections and the strength of the single-receiver observations. In recent years, additional GNSS constellation satellites and frequencies have been brought on-line in large numbers, and GNSS constellation-provided PPP corrections have begun (Xu et al. 2021; Fernandez-Hernandez et al. 2022; Naciri et al. 2023). These developments have greatly increased estimation redundancy, making near-instantaneous PPP without regional reference stations possible (Naciri and Bisnath 2023). This evolution of PPP technology in terms of positional accuracy versus convergence time is illustrated in Figure 2. Therefore, it may be possible to a) dissolve the old GNSS duality of niche, professional-grade versus mass-market, low-cost hardware and software with low-cost hardware utilizing PPP (and RTK and PPP-RTK) software countermeasures to obtain precise PNT; and b) with PPP corrections from GNSS constellations, perhaps, as a reversion to SPP, to have PPP be the natural operational mode of precise GNSS PNT (Bisnath 2020).
Elements
Theoretical development
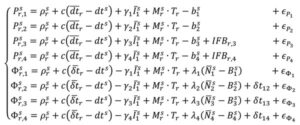
The PPP measurement processing technique utilizes the GNSS pseudorange (code) and carrier-phase (phase) observables. For receiver r and satellite s, the respective code and phase measurements on frequency can be defined as:
where and Φi : pseudorange and carrier-phase measurements, respectively, in meters; ρ: geometric range between receiver and satellite; c: vacuum speed of light; dtr and dts: receiver and satellite clock offset from GPS Time, respectively; γi = ƒ ⁄ ƒ : ratio of frequencies applied to first frequency ionospheric delay I to recover ionospheric delay at frequency i; Tr : zenith troposphere wet delay; M: mapping function to map to satellite-receiver line-of-sight troposphere delay; λi = c ⁄ƒi: signal’s wavelength; N : integer ambiguity on frequency i; br,i and b: receiver and satellite pseudorange hardware biases, respectively; Br,i and B : receiver and satellite phase biases, respectively; and рi and Φi : residual unmodeled errors such as multipath and noise in code and phase measurements, respectively.
where and Φi : pseudorange and carrier-phase measurements, respectively, in meters; ρ: geometric range between receiver and satellite; c: vacuum speed of light; dtr and dts: receiver and satellite clock offset from GPS Time, respectively; γi = ƒ ⁄ ƒ : ratio of frequencies applied to first frequency ionospheric delay I to recover ionospheric delay at frequency i; Tr : zenith troposphere wet delay; M: mapping function to map to satellite-receiver line-of-sight troposphere delay; λi = c ⁄ƒi: signal’s wavelength; N : integer ambiguity on frequency i; br,i and b: receiver and satellite pseudorange hardware biases, respectively; Br,i and B : receiver and satellite phase biases, respectively; and рi and Φi : residual unmodeled errors such as multipath and noise in code and phase measurements, respectively.
In order to eliminate ionospheric refraction, the original PPP solution forms the ionosphere-free (IF) linear combination of the dual-frequency GPS code and phase measurements:
From this combined form, the IF float PPP equations are (Kouba and Héroux 2001):
where the terms with tildes are biased by other terms from the starting observation equations, but allow for enough redundancy for user position, receiver clock offset, a zenith tropospheric term and real-valued, biased phase ambiguity terms to be estimated. In a sequential least-squares or Kalman filter optimal estimation process, positional accuracy depends on the quality of the satellite orbit and clock corrections, along with applying additional error modeling (including satellite and receiver antenna phase center offset and variation, solid Earth tides, ocean loading and phase wind-up), and, most importantly, the quantity, geometrical distribution and quality of the code and phase measurements. The state is initialized with m-level pseudorange measurements and slowly converges to the centimeter-level over tens of minutes to hours as the real-valued, biased phase ambiguity estimates reach steady state. This original or classic PPP solution, characterized by slow convergence to a fixed ambiguity-like positioning solution, may be what some in the community still think of as PPP.
PPP-RTK was developed as a means to remove these shortcomings of classical, float PPP by supplying PPP-like error state corrections from a regional RTK network to allow near-instantaneous carrier-phase ambiguity resolutionAR, (AR), solving both PPP’s convergence and accuracy problems (Wübbena et al. 2005). Significant operational improvements include increased spacing between (N)RTK reference stations, so less GNSS terrestrial infrastructure is required, and significant reduction in data transmissions from observation space representation (OSR) to state-space representation (SSR). By providing regional atmospheric corrections and ambiguity fixing, RTK-like performance is achieved but with larger CORS spacing. This approach has found commercial success in economically sustainable regions.
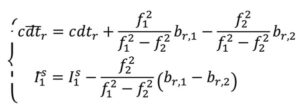
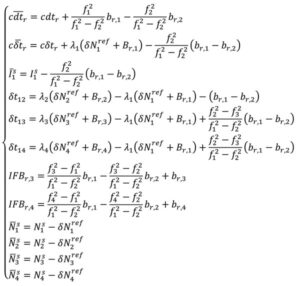
In parallel, active research continued in PPP-AR, given its desirable characteristic of not requiring regional reference stations. Multiple solutions were developed (e.g., Collins et al. 2008; Ge et al. 2008; Laurichesse et al. 2009), each of which reformulated the PPP observation equations to isolate the phase ambiguities, while overcoming datum defects in the estimation process. For example, the decoupled clock model (DCM) (Collins et al. 2008) isolates the phase ambiguities and directly estimates them as integers. The DCM does not make any assumptions regarding receiver biases and uses separate terms for code and phase clocks due to the imprecision in their synchronization — hence the model’s name. Satellite code and phase biases are required, along with satellite orbit and clock corrections. Then, standard AR methods, such as LAMBDA, can be applied. In the DCM, the fundamental code and phase equations are altered to:
where dtr, and δtr, are the receiver code and phase clocks, respectively. The receiver pseudorange bias br,i is parameterized in such a way that it is grouped into the receiver pseudorange clock forming dtr and ionospheric delay forming I . These terms are derived to be:
Through substitution, the DCM dual-frequency observation equations become:
In decoupling the receiver clocks, the carrier-phase measurements lose their datum. To remove the estimation singularities, one satellite is selected as the reference satellite, its ambiguities are fixed to arbitrary integer values and used for between-satellite single-differencing. N = N + δN , where N are the arbitrarily set integer ambiguities on frequency i and δ N are the differences between the actual integer ambiguities and the arbitrarily set ones. Carrier-phase cycle slips must be detected and changes to the reference satellite accounted for. While initial solution convergence is still a characteristic of uncombined, dual-frequency PPP-AR, the uncombined model solved the problem of brief data outages (solution re-convergence), as the slant ionosphere estimates are used as a bridging parameter between small data gaps.
The dual-frequency model can be expanded to, e.g., quad-frequencies for multi-constellation, multi-frequency (MCMF) PPP-AR. Accounting for the use of a reference satellite per constellation, accounting for any spatial and temporal reference system differences between constellations, and additional inter-frequency pseudorange biases (IFBs) the up to quad-frequency DCM formulation can be derived as:
with:
There is therefore the need for accurate and consistent MCMF satellite orbit, clock, code bias and phase bias corrections. Some constellation-based corrections, e.g., from QZSS, BDS and Galileo, are appearing.
There is therefore the need for accurate and consistent MCMF satellite orbit, clock, code bias and phase bias corrections. Some constellation-based corrections, e.g., from QZSS, BDS and Galileo, are appearing.
Results and analysis
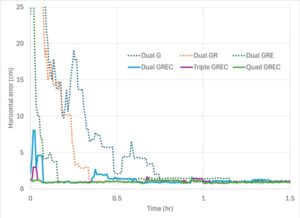
Figure 3: PPP-AR horizontal positioning error for various combinations of GNSS constellations and number of frequencies showing average initial convergence for IGS stations CUSV (Thailand), KIR8 (Sweden) and RABT (Morocco) on day of year 128 in 2024. Results presented are the average of 24 hours of data, reset every three hours.
How has PPP positioning solution convergence and accuracy evolved? The above model is now used to illustrate the performance of MCMF PPP-AR with up to four frequencies. The quad-frequency model has been implemented in the York-PPP client engine developed at York University. For performance illustration purposes, Centre national d’études spatiales (CNES) MCMF correction products are used for consistency and one day (day of year 128 in 2024) of high-quality MCMF GNSS observations are used from each International GNSS Service (IGS) stations CUSV in Bangkok, Thailand, KIR8 in Kiruna, Sweden, and RABT in Rabat, Morocco. Note that data from other days and other comparable stations produce similar positioning results. Simulated real-time, sequential least-squares, kinematic processing was performed for the following observation scenarios: 1) dual-frequency GPS (dual G); 2) dual-frequency GPS and GLONASS (float), with no ambiguity fixing of the frequency-division, multiple access GLONASS signals (dual GR); 3) dual-frequency GPS, GLONASS and Galileo (dual GRE); 4) dual-frequency GPS, GLONASS (float), Galileo and BeiDou (dual GREC); 5) up to triple-frequency GPS, dual-frequency GLONASS (float), triple-frequency Galileo and triple-frequency BeiDou (triple GREC); and 6) up to triple-frequency GPS, dual-frequency GLONASS (float), quadruple-frequency Galileo and quadruple-frequency BeiDou (quad GREC). Operational effects, such as correction latency, are not considered. Figure 3 demonstrates MCMF PPP-AR horizontal error initial solution convergence for these scenarios, averaged from each 24-hour dataset, reset every three hours across the three global stations.
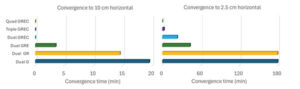
Figure 4: PPP-AR horizontal positioning convergence times for various combinations of GNSS constellations and number of frequencies to 10 cm and 2.5 cm for data used in Figure 3.
The dashed time series in figure show the benefits of adding constellations in the PPP-AR processing. From the average of the dual-frequency GPS solutions, the addition of each constellation reduces convergence time by approximately one-half. Then, by adding additional frequencies, convergence time is further reduced to basically instantaneous convergence using available measurements on up to four frequencies from all four GNSS constellations. These results bode well for GNSS data collection in sky-obstructed areas or with lower-quality hardware. Figure 4 provides the convergence times for the average solutions from each processing scenario to reach and sustain below 10 cm and 2.5 cm horizontal error, respectively. These are typical specifications for numerous static and kinematic applications. Four constellation, dual-frequency data are required to attain 10 cm horizontal positioning error or better near-instantaneously. However, to achieve the 2.5 cm convergence definition, at least triple-frequency data are necessary. The post-10 cm convergence horizontal solution accuracy, as defined by rms error, is 9 cm for dual-frequency GPS and 1 cm for each of the GREC processing scenarios. The post-2.5 cm convergence horizontal solution accuracy, as defined by rms error is 17 cm for dual-frequency GPS and 4 cm for each of the GREC processing scenarios.
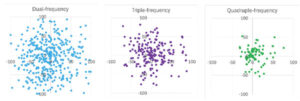
Figure 5: MCMF PPP-AR horizontal positioning error for dual-frequency GNSS (left), up to triple-frequency GNSS (center) and up to quadruple-frequency GNSS (right) for IGS stations CUSV (Thailand), KIR8 (Sweden) and RABT (Morocco) on day-of-year 128 in 2024. Results are epoch-by-epoch solutions in the north and east directions in centimeters with 8,640 position estimates in each scenario.
What if a more robust PPP solution is considered that also further analyzes the introduction of additional frequencies? The same three-station, one-day dataset can be processed in an epoch-by-epoch mode, where all filter states are reset. Therefore, there is no filtering with no assumptions about system dynamics. In this case, using a 30-second sampling rate, results in 8,640 position estimate “snapshots” — a robust process of estimation that can be useful for, e.g., clearly defining integrity for safety-of-life applications. The MCMF PPP-AR results for 1) dual-frequency GPS, GLONASS (float), Galileo and BeiDou (dual GREC); 2) up to triple-frequency GPS, dual-frequency GLONASS (float), triple-frequency Galileo and triple-frequency BeiDou (triple GREC); and 3) up to triple-frequency GPS, dual-frequency GLONASS (float), quadruple-frequency Galileo and quadruple-frequency BeiDou (quad GREC). Figure 5 illustrates the epoch-by-epoch horizontal positioning performance (in cm) for these three scenarios using planimetric subplots. Most position estimates for each scenario are near each subplot center. Adding measurements from the additional frequencies from the dual-frequency base to up to three frequencies and then up to four frequencies for the same four constellations greatly improves horizontal positioning precision and greatly reduces the quantity and magnitude of positioning outliers.
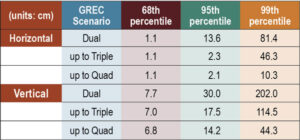
Table 1: MCMF PPP-AR positioning error for 68th, 95th and 99th percentiles (in cm) for data used in Figure 5.
Table 1 provides the epoch-by-epoch MCMF GNSS PPP-AR horizontal and vertical 68th (1-sigma), 95th (2-sigma) and 99th (3-sigma) percentile positioning error statistics for the same dataset. At the 68th percentile, all scenarios produce centimeter-level horizontal and sub-decimeter-level vertical positioning. However, at the 95th percentile, only triple- and quad-frequency processing can produce centimeter-level positioning in the horizontal component and near decimeter-level positioning in the vertical. To assess extreme position estimate outliers, the 99th percentile statistics show that dm-level horizontal positioning can be maintained with quad-frequency processing.
Table 2: Average estimation redundancy for data used in Figure 5.
The MCMF PPP-AR filtered results indicate that near-instantaneous, cm-level PPP is achievable with quality geodetic observations. The epoch-by-epoch, unfiltered results imply that robust, centimeter-level PNT is achievable. Table 2 provides the average redundancy in the epoch-by-epoch processing, where the redundancy is the difference between the number of measurements used and the estimation states. This measure provides insight to how the increase in the number of measurements, while not increasing the number of satellites or the dilution of precision, significantly improves PNT estimation performance for PPP-AR — as this is a measurement-driven technique. The average redundancy increases from 34 to 62 when expanding from dual-frequency GPS to dual-frequency GPS + Galileo and to 121 when using dual-frequency measurements from all constellations. Additionally, increasing processing to include up to triple-frequency measurements and quad-frequency measurements grows this metric to 154 and 183, respectively. The estimation process then becomes more robust against measurement errors and biases. It has more measurement strength to estimate all state parameters, including slant ionosphere refraction terms and integer ambiguities, allowing for improved position estimation precision.
Evolutionary
MCMF PPP-AR performance continues to improve. Positioning performance for quality geodetic measurements can produce horizontal centimeter-level positioning performance nearly instantaneously. Robust performance can be obtained with epoch-by-epoch processing, resulting in centimeter-level and few-centimeter-level horizontal and vertical positioning at the 95th percentile level using up to quadruple frequency measurements. Also, inclusion of additional measurements from additional frequencies greatly improves estimation redundancy, thereby improving state estimation.
Future research developments, testing and implementation include: adding measurements from available fifth frequencies; investigating less reliance on noisy and multipath-prone pseudorange measurements; expanding robust near-instantaneous PPP in urban environments; further defining/characterizing PPP integrity and safety integrity levels; having PPP be an independent or complimentary solution to/with (N)RTK for precise PNT; minimize requirements for atmospheric corrections; further use of PPP in mass-market hardware; and further integration of PPP as part of sensor suite solutions (e.g., automotive, smartphone, UAV, robotics, etc.) for resilient PNT.
Finally, what is the usefulness of the research in our lives? PPP measurement processing for GNSS is the scientific and industry standard for many user applications. There continues to be growing commercial adoption of this evolving technology, including expanded use in traditional (N)RTK precise applications, mass-market applications using low-cost hardware, and safety-of-life applications, including automotive, other passenger vessels, smartphones, robotics, UAVs and for aids to pedestrians.
The European Union Agency for the Space Programme (EUSPA) has awarded GMV a framework contract to advance the Galileo Reference Centre (GRC), a key facility for monitoring and evaluating the performance of the Galileo satellite navigation system. Located in Noordwijk, the Netherlands, the GRC independently assesses Galileo’s operations, signal quality, and user-level service performance and compares its performance with that of other GNSS.
The upcoming GRC V2 version will introduce real-time monitoring capabilities, enhancing EUSPA’s ability to oversee GNSS services. This evolution will support additional Galileo services, including:
Signal Authentication Service (SAS): Strengthening trust in Galileo signals.
Time Dissemination Service: Enabling precise synchronization for critical infrastructure.
Search and Rescue (SAR): Improving emergency response operations.
Emergency Warning Satellite Service (EWSS): Facilitating public alerts for natural disasters and emergencies.
Key operational improvements in GRC V2 include:
Enhanced monitoring using data from multiple institutions.
Real-time processing for faster user notifications.
Seamless system upgrades without disrupting operations.
Advanced cybersecurity measures integrated into a platform-as-a-service model.
The upgraded GRC is expected to be operational by 2026 without impacting ongoing functions.
Xona Space Systems and Trimble have collaborated to integrate Trimble correction services with Xona’s PULSAR high-performance navigation service.
Initial satellite launches are expected in late 2026 with service starting in 2027 through the PULSAR satellite network, enabling secure, high-precision positioning for applications ranging from geospatial to low-power mass mobile and IoT. In support of this new and developing collaboration, Xona has received an investment from Trimble Ventures.
Xona PULSAR, powered by Xona’s planned network of small satellites in low-Earth orbit (LEO), is being developed to deliver robust and secure high-precision positioning and navigation services directly to current GNSS hardware. The PULSAR service, which will include high precision correction services through this collaboration, has the potential to provide scalable, cost-effective solutions for industries with demanding positioning and navigation requirements, such as civil construction, surveying and mapping, and automotive and IoT applications. Xona’s signals are also expected to enable operations inside low-rise buildings, as well as improve resistance to jamming and interference compared to current GNSS capabilities.
Precision positioning solutions from LEO constellations are intended to provide new enhanced capabilities along with high levels of uptime to meet the rapidly evolving needs of industries around the world. Including Trimble correction services with Xona PULSAR is expected to enhance the reliability of Trimble correction services delivery, which is crucial for users in areas without reliable cell coverage, limited sky visibility environments, including high-latitude regions and other challenging geographies.