The Federal Railroad Administration has relinquished responsibility for national differential GPS (NDGPS), saying that it no longer supports NDGPS for positive train control. DOT’s Research and Innovative Technology Administration (RITA) now has sponsorship of NDGPS, and will hold a meeting on October 4 to assess.
The outlook for NDGPS appears bleak. “Without funding, the system faces tough choices.” Options reportedly under consideration include moth-balling the system for $2 million or shutting it down for $10 million. NDGPS supporters claim that a large mass of users of NDGPS have not yet been heard.
In a recent editorial in GPS World’s Survey & Construction e-newsletter entitled “No Joy in Surveyville,” Eric Gakstatter lamented the performance of the GPS constellation for surveying. He is not alone. In June, the Australian Broadcasting Company reported that farmers in Australia were experiencing major problems with GPS because two satellites had been removed from service.
For many, GPS is at its best performance ever, with 29 satellites in orbit and user range errors at their lowest levels in years. Yet for others, GPS performance falls short of expectations. What is the real issue here? Is it the number of usable satellites in the constellation — or have the demands of the user community grown?
Today’s Performance
Let’s first take a look at the performance relative to the current constellation. The GPS Standard Positioning Service (SPS) Performance Standard identifies 24 nominal orbital slots for a 24-satellite constellation. In this article, I refer to these as the 24 primary slots. My source material for the slot allocations is the U.S. Coast Guard operational advisories.
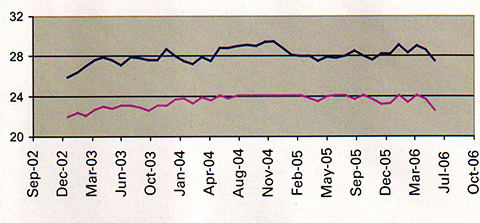
Examining GPS performance over the past three years with respect to satellites in the key orbital slots, we see some interesting trends. Figure 1 presents the average number of satellites on orbit as well as the average number of healthy satellites in the 24 primary slots. A healthy satellite is one that has not been removed from service either due a scheduled outage (satellite and clock maintenance) or from an unscheduled anomaly (for example, degraded clock operation or problems with the spacecraft bus).
Figure 1. Average number of healthy satellites on orbit (blue) and average number of healthy satellites in the 24 primary slots (red).
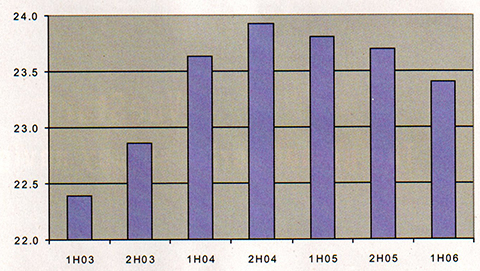
The number of usable (healthy) satellites grew from 26 to about 28 on average, but this has not changed substantially in the past three years. It has varied between 27 and 29 satellites, with no significant upward or downward trend over this period. The number of satellites in primary slots, however, does show a noticeable trend, growing steadily through 2003 until late 2004 when it leveled off, after which it began to decrease. This trend recurs in Figure 2, where we view the same metric in half-year increments.
Figure 2. Average number of healthy satellites in primary slots, shown in half-year increments.
The reduced number of filled primary slots stems from unscheduled outages. Scheduled outages have no significant impact on number of satellites usable since the operators typically remove a satellite from service for only a few hours, and such maintenance is performed on the order of once a month per satellite. Unscheduled outages, however, can last days and may require significant effort on the part of the satellite operators to resolve.
The SPS Performance Standard states that 24 operational satellites must be available on orbit with 0.95 probability (averaged over any day). We see this figure has been met at the 100 percent level over the past three and a half years.
The SPS Performance Standard further states that at least 21 satellites in the 24 nominal plane/slot positions must be set healthy and transmitting a navigation signal with 0.98 probability (yearly average). This figure is met.
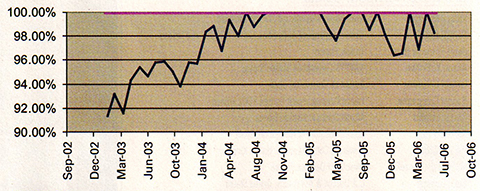
Figure 3 presents the monthly availability of the primary 24-satellite constellation (blue plot), that is, the percent of time over a month that there is a full set of 24 usable satellites in their primary slots. Here we see a marked trend, showing a steady growth from the beginning of 2003 up to the end of 2004, followed by a reduction, but still above the 95 percent level. Figure 3 also shows the monthly availability of 21 or more satellites assigned to the 24 primary slots (red plot), which has been at 100 percent over the past three and a half years.
Figure 3. Monthly availability of the primary 24-satellite constellation (bue) and of 21 or more satellites assigned to the 24 primary slots (red).
So What’s the Problem?
If the U.S. government is meeting its commitments, why do users see degraded performance?
Part of the issue is that the government manages the constellation to a set of metrics that is not up with the times, so to speak. The SPS Performance Standard has a legacy dating from prior to May 2000 when the government imposed Selective Availability, the intentional degradation of the positioning and timing accuracy for civilian users.
Surveyors back then were considered eccentrics, as it were, living off the crumbs that fell from the table of the basic service. They took advantage of carrier phase tracking, but were content to post-process the data. Work that took days and weeks prior to GPS could now be done in hours. Well, those days are gone, and the push is now to get work done in minutes.
The familiar adage “Give GPS users a yard and they’ll want an inch” has a corollary: “Give GPS users a process that takes them hours and they’ll want it done in minutes — or seconds!” Users have found they can do their processing much faster, as long as the constellation performance is well above the levels set in the SPS Performance Standard. This has indeed been the case since 2000.
The GPS program has placed into orbit more satellites than originally anticipated. The general thought was that 27 satellites were sufficient to support the 24 satellite constellation. With 28, 29, and even 30 satellites in orbit, GPS has exceeded expectations, yet now the new expectations are that the government will sustain this level of performance.
Improvements Happen
The U.S. Air Force has made significant improvements in GPS operations as well in recent years. The satellite operators have become more user-focused. Prior to taking a satellite offline for maintenance, operators examine the effect of its removal to users worldwide. Also, they have adjusted operational procedures such that anomalies that once took hours to correct are now resolved within minutes. These improvements have directly benefited users, yet despite this, the mindset of the GPS operators is still to provide the service identified in the SPS Performance Standard, which is not the same as day-to-day service that users have come to expect.
The Presidential Policy on National Space-Based Position, Navigation and Timing (PNT), issued in December 2004, provides high-level guidance on what service users can expect. Among its goals for space-based PNT, the policy states:
provide uninterrupted availability of positioning, navigation, and timing services
meet growing national, homeland, economic security, and civil requirements, and scientific and commercial demands.
What “availability” is assumed in the first goal? Is it availability for users employing the 5-degree mask angle (as defined in the SPS Performance Standard), or is it the more stringent demand of mask angles at 10 degrees or higher? Is it availability of four satellites in view to support the generic user or that of six satellites in view to support receiver autonomous integrity monitoring with fault detection and exclusion?
What “demands” mentioned in the second goal are to be met? Are they the demands of the precision farmer and surveying community? Or perhaps the tighter requirements of the urban user?
This policy also states that the government will improve the performance of space-based positioning, navigation, and timing services. This implies that the service identified in the SPS Performance Standard will need to be changed to accommodate these improvements.
To some extent, the U.S. government can only go so far in meeting user needs with the current system. The maximum number of satellites today’s operational control system can support is 30. As of the time of this article, GPS had 29 operational satellites on orbit, although at any given time not all are usable, due to necessary maintenance or unscheduled downtime. Whenever satellites are set unusable, the satellite operators look at the resulting performance, comparing it to the SPS Performance Standard. This is where the issue lies. The SPS Performance Standard assumes a generic user with only a 5-degree mask angle, yet this one assumption no longer represents a significant class of GPS users: the precision users.
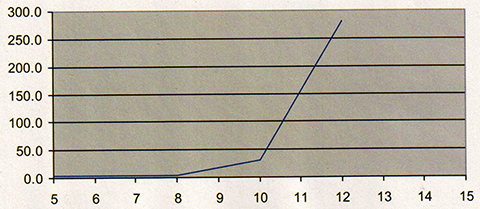
If there are 29 satellites available, why is a reduction to 27 such a big issue? Today’s GNSS users are more demanding than the users were even five years ago. Accuracy is the thing, and real-time accuracy is the most important thing. Today GNSS is used in precision applications such as agriculture, surface mining, and seismic drilling. To get the needed accuracy, users of GNSS exclude low-elevation angle satellites to mitigate the effects of the atmosphere. They set the mask angle in their receivers to 8, 10, even 12 degrees. This higher mask angle reduces the number of available satellites to the users, and correspondingly the dilution of precision and associated positioning error goes up, as illustrated in Figure 4.
Figure 4. Picture of DOP performance over various mask angles for June 5, 2006.
Is GPS Properly Managed?
So the issue becomes, is the U.S. Air Force managing the constellation in the best interests of all of its users? Is keeping older satellites in orbit the best policy, and asking the satellite operators to do the best they can with the constellation provided to them? Or is it better to expend taxpayer dollars to replace the older, yet still operational, satellites with newer satellites?
From a user’s perspective, the newer satellites are better — far better than the older satellites in range accuracy, health, and resistance to integrity failures. The increased reliability produced by their redundant systems also acts as insurance against longterm failures of GPS.
Today’s users do expect more from GNSS. While today they have but one choice, in the future they will have at least two others, as Galileo and GLONASS come online. So it is important for the U.S. government to continue to adapt GPS operations to support its current user base.
Recommendations
There is no easy solution to the problem of ensuring that GPS continues to meet today’s user’s needs, since the field of users and applications is becoming more diverse and demanding. For many, the preferred answer is to launch more satellites, keeping the level at 30 satellites, but there are significant cost implications with this approach.
On the other hand, relying on an aging constellation to remain operational is also fraught with peril. Many satellites are on their final legs, with key components on a single point of failure. The clocks onboard the satellites are not as stable as they used to be, and require considerable attention from the satellite operators. The cost of losing satellites is significant for certain sectors in our economy, the sectors that employ precision GNSS. In the distant future this problem will be eliminated through the diversity of fully operational Galileo and GLONASS constellations, but for now the issues are immediate and real.
The U.S. government can and should take several steps to better address the increasing demands on GPS:
The government should update the SPS Performance Standard to accommodate other classes of users and bring the metrics up to date with respect to current performance.
The satellite operators should refine their assessments of user impact to include a view of how special classes of users are impacted. In particular this should include precision users and aviation applications. This involves using higher mask angles in their assessments and incorporating receiver autonomous integrity monitoring (RAIM) availability.
The decision-making authorities in GPS should continue to support an aggressive program to replace aging satellites.
Such improvements will continue to benefit GPS users worldwide, and help ensure the U.S. government’s goal of providing the best PNT service available.
John W. Lavrakas is a consultant in satellite navigation. He has spent the past 26 years in GPS, working in satellite command and control, user operations, GPS receiver development, and satellite navigation performance analysis. Contact him at [email protected].
Javad Ashjaee, front left, with colleagues in his Moscow office.
Javad Ashjaee (JA) is president and CEO, Javad Navigation Systems. Alan Cameron (AC) interviewed him by phone at his Moscow office.
AC: What details can you give us about the “new beginning” you mentioned in your May profile?
JA: Things have changed a lot during the past six years. ASICs, microprocessors, and electronic technology in general have progressed significantly. These advances give us much better fundamental tools to implement new signal processing innovations and to design better and smaller products, while at the same time reducing their cost. With new GPS signals, improved GLONASS, and Galileo on the horizon, there are lots of opportunities and challenges to get me going for many years again. I phrased it as a “new beginning” because in the past six years I was not as productive as I wanted to be, due to situations beyond my control.
AC: How do you see your “complete independence” playing out in the marketplace?
JA: Now I can start working on GNSS technology again and hope to make a difference in this field again. The last six years were the darkest years of my professional life. The partnership that I had hoped would be a complementary force in pursuing the most innovative technologies turned out mostly frustrating, and it put stumbling blocks in the way of what I wanted to accomplish. By “complete independence” I mean the contractual limitations have expired, and I am free to pursue new technologies on my own and bring innovations to the marketplace that my team and I feel proud of.
We have just started this new round of technical development and we are trying to define the technical directions. I hope to bring a completely new generation of GNSS products to the market in the second half of 2007. What keeps me motivated and as excited as my first attempts of 25 years ago is the level of support and encouragement that I receive from all my colleagues, friends, and even some of my competitors.
AC: What technology challenges are you and your team tackling?
JA: One of my technology challenges is to bring high-end Galileo into the GPS/GLONASS picture. My first decade of GNSS involved GPS, the second decade GPS+GLONASS, and in the third decade I hope for GPS+GLONASS+Galileo. Of course there are also innovations in signal processing in every one of these navigation systems. As I said earlier, enhancements in the electronic industry, as always, keep pushing us to come up with new products, similar to what you see in the computer and mobile communications industries. The life of any product cannot be longer than two years.
I’m waiting for the Europeans to tell us what is really their plan for Galileo. I want to focus a lot on Galileo but I should admit that with Galileo I’m partially hopeful, but partially disappointed, too.
AC: Why are you disappointed about Galileo?
JA: I basically do not know, or I should say do not understand, the current plan of Galileo as presented; and I could not find anyone who could give reasonable answers to my questions. It is not obvious who the forces behind the Galileo project are, who is going to fund it, and who needs it to the extent that they are willing to pay for it. On several occasions, in different forums I tried to raise such questions and subsequently became convinced that unfortunately my worries and questions regarding Galileo were valid. Let me raise these questions once again here with you. I hope all my worries and suspicions regarding Galileo prove to be false and sincerely hope that Galileo to become a reality soon.
Despite all the questions and uncertainties about Galileo, but due to good publicity, in many communities Galileo has received much more attention than GLONASS, which already has about 20–25 years of on-orbit history and currently about 16 operational satellites on orbit — and recently, with current oil prices, a solid plan to complete the system soon. Until recently many companies were trying to fight or ignore GLONASS, believing that it was not likely that Russia would complete the system. Now Trimble, NovAtel, and Leica have recently announced that they have GLONASS in their receivers, too.
The attention given to Galileo, even before they have a first real satellite, is because of the credibility that the Europeans have earned. I hope this credibility continues to grow by providing open information to the public. Unfortunately, in my belief, so far they have not done so.
One of the issues confronting Galileo is the explanation of its funding and management. It has been said that Galileo will be funded as a private business, but no one has ever provided a business model. When I try to guess about the structure of any business plan based on the information I have received, I conclude that it is very unlikely that it can be funded as such. The fate of Iridium — which did have a detailed business plan but overestimated its number of subscriptions — makes us more worried about Galileo, which does not even have a business plan. Iridium had the support of large, experienced industrial names like Motorola.
Any company whose stock is being traded publicly will suffer a lot as soon as they announce involvement in any project that does not have a solid business plan. The larger the company, the more vulnerable they are to close scrutiny by stock-market analysts.
Funding in Doubt
In providing details on Galileo funding, it was said that most of the Galileo funding will come from bank loans. This makes the issue of a business plan much more urgent and critical for Galileo, especially given the fate of Iridium. Alternatively, the money could come from specific governments. This would easily put an end to the discussion of private funding and give much hope to all of us. I hope this will happen soon.
There are several other flaws in Galileo’s private financial planning. First, GPS tried to make itself a self-funded program but quickly concluded that it was not feasible. Second, if GPS authorities were wrong, and it could have been done as a self-funded project, now with GPS being offered for free, Galileo has a much tougher time to make it as a private enterprise. Note that GLONASS is also there for free. Can you start a pizza business, when you know the guy next door is giving away pizza for free?
Third, it is extremely unlikely that anyone will buy Galileo-only receivers, which means Galileo wants to piggy-back itself on GPS and receive money from the operational GPS. In our pizza example, imagine that your pizza shop can sell its pizza only if it can add slices of pizza from the free shop next door! Clearly the shop next door will stop providing you free pizza if it sees you are making money — or it will at least want its share of the profit.
The progress in GLONASS, also offered free of charge, makes it even harder for Galileo’s private plan to succeed. With 30 GPS and 24 GLONASS satellites, at any given instance we have more than 14 visible satellites. The critical number to have reliable and robust RTK is something like 10 satellites. The additional Galileo satellites are a plus, but the European system cannot survive if it bases its financial plan on riding on the shoulders of GPS (or GPS+GLONASS).
It short, the Galileo private funding scheme assumes free support from GPS — which means Galileo assumes that U.S. tax payers will continue to fund Galileo.
I am certain that even if GPS authorities do not object, the U.S. taxpayers will. U.S. citizens and organizations like the U.S. GPS Industry Council will take the issue to the proper authorities.
By collecting the first license fee from users or manufacturers, Galileo authorities open the door for large international disputes that put the fate of Galileo in question and raise the issue of customer liability, if it is going to be modeled financially as I mentioned earlier.
In the private business model of sharing profit with GPS, Galileo will be at a disadvantage for many years until they have operational satellites comparable to GPS.
The current situation of Galileo, as I see it, is that some independent and mostly research-oriented organizations have been able to collect enough money to define signals. We have seen some published information, such as Günter Hein’s article in GPS World (“Galileo Signal and Frequency Design,” June 2003) on the signal structure. But now when the ICD is published, the signal structure is drastically different.
The Military Question
Similar to GPS and GLONASS, the need for Galileo mostly comes from military establishments and markets. The two recent wars showed that the benefits of satellite navigation systems are no longer a luxury, but a necessity for any country that possesses a certain level of modernized military. The French government needs its own navigation system to independently market its Exocet missiles and Mirage 2000, for example. The Chinese government also has need for such systems, and this could be the reason that they push to fund and participate in the Galileo project.
Does this mean France will break from NATO and join forces with China? This brings us to the very difficult question of international alliances, much more serious than the financial and funding issues that I raised earlier. I find it unlikely that the United Kingdom may want an independent navigation system separate from the United States. France may be the only major country that is willing and can afford to fund such system. This is an extremely difficult issue. I cannot think of any country in Western Europe that is pushing for the breakup of NATO.
This is an order of magnitude more difficulty than money. This is an issue of East-West alignment, and the breakup of NATO, which has many more consequences.
It is very simple-minded if we think Paris taxi drivers are pushing to have their own system because they do not trust the United States!
Although the European military should be most concerned about the future of Galileo, they have been absent from all the Galileo conferences that I have attended. The only European military uniforms I have seen were those of a German Air Force brass band that played Mozart songs at the Munich ENC-GNSS conference.
At best, it seems that some large European companies have teamed up to lead the Galileo project and keep space, control, and user segments under their management and control, and then try to attract money from military sources. This scenario also does not seem to have much chance of success. It is unlikely that military organizations will allow leadership and control of their vital navigation systems to remain in private-sector hands. Under any circumstances, the military organizations will be the real force behind the Galileo even though they may hide it publicly, at least for a while.
Galileo’s best chance of success is for the French government to pay all or at least most of the costs, and not depend on support from other countries who do not have much vital interest and dependence on a new navigation system. I hope this will happen sooner rather than later.
Galileo is not going to delay because of technical issues. There is no problem for the Europeans to have a good signal structure, or to launch good satellites. There is enough intelligence in Europe, they can solve those quickly. Financial and, more important, political issues will determine the future of Galileo.
Will Galileo happen or not? I have no answer. I had a chance to share my thoughts with several prominent authorities. They mostly agreed with my concerns but they said it was politically incorrect for them to even discuss these sensitive issues.
To go forward, I will work on Galileo and will assume that the Galileo authorities will work with the GPS authorities and will make a playing field such that U.S. GPS manufacturers can have the same benefits from Galileo that Europeans have from GPS. Previously we followed the information that was released unofficially by Galileo (by semi-official authorities) and we made chips to track those signals. Next we will follow the new ICD and we will make receivers based on it.
Meanwhile we will try to tap whatever legal authorities, the GPS authorities in the U.S., to help us make the playing field level, to make the Europeans give us the same prompt access to information that they give to European organizations, without any charge.
The United States has been so generous and so open in providing complete and honest GPS information to all, that the first GPS satellite was actually tracked in the UK. Dr. Brad Parkinson noted this point in his keynote speech at the European Navigation Conference in Manchester.
I was so hopeful and supportive of Galileo in the article I wrote for you some months ago. But as I tried to find information regarding the future of Galileo, I developed serious concerns. I pray for Galileo to become a reality soon.
AC: What percentage of Javad Navigation Systems’ annual budget is devoted to research and development?
JA: We do not have a fixed percentage. Developing technology is our first priority and has always been a priority for me. We spend whatever it takes to have the best technology, even if we have to borrow money — though we have never had to. Probably this has been the reason that in all my history of involvement with GPS, the past 25 years, we were profitable every single quarter, because our focus was spending on technology, and giving priority to it. I don’t think there is any other GPS company in the world that can claim profitability for every quarter for 25 years. Our cumulative annual growth in each company was 45 percent. Currently we have a staff of over 100. Our Advanced Theoretical Design team alone consists of more than twelve professors and scientists with more than 200 person-years of experience.
AC: How can we best navigate the next years of new signals, structures, and so on?
JA: The main thing is that we request all U.S. GPS authorities to help to make this a level playing field.
If the Galileo authorities really intend to combine GPS with Galileo for commercial markets, they’d better be as gracious and open as GPS authorities were to them.
Iridium
Iridium communications service was launched on November 1, 1998, and went into Chapter 11 bankruptcy on August 13, 1999.
The system was originally to have 77 active satellites (later reduced to 66) to enable worldwide voice and data communications using handheld devices. Its financial failure was largely due to insufficient demand for the service. The system is currently being used extensively by the U.S. Department of Defense for its communication purposes.
By Javad Ashjaee, President & CEO, Javad Navigation Systems
The launch of the Galileo test satellite marks another very significant and exciting day in the history of navigation. Just as competition between GPS manufacturers rapidly enhanced technology and performance, the competition between the constellation providers should do the same.
In 1984 a high-end GPS receiver weighed more than 100 pounds, performed poorly, was very difficult to operate, and came with a price tag of about $200,000. Thanks to competition, a high-end GPS receiver now weighs less than one pound, performs significantly better and with greater ease, and costs less than $5,000.
The benefits of the competition Galileo will bring are already apparent. I believe that the Galileo project had a significant role in removing Selective Availability (SA) from the GPS signal, or at least expedited it. In fact, the removal of SA was announced at the first conference discussing Galileo. The Galileo project also proved to be a positive influence on the GPS modernization project and encouraged faster development of GLONASS satellites.
Undoubtedly, competing with GPS was the main reason and force behind the creation of GLONASS. GLONASS, in turn, helped the removal of SA from GPS and encouraged the Galileo project. With Galileo, history may very well repeat itself.
Galileo Advantages. Galileo has several advantages over its historical counterparts. Galileo benefits from more than 30 years of experience with GPS and 20 years with GLONASS. It should be, and most probably will be, more advanced than GPS and GLONASS from the get go. Galileo also has the luxury of international support in general and that of U.S. GPS officials in particular. In contrast, GLONASS was a project of the Cold War and was, at best, ignored by the West. I witnessed current U.S. support for GLONASS, however, a few months ago when coordinating the meeting between U.S. Department of Defense and Russian officials to discuss common GPS and GLONASS signals. With a solid support system and history on its side, Galileo has a promising future.
That is not to say that Galileo goes unchallenged. GPS and GLONASS started mostly as military projects. The two recent wars clearly demonstrated the significance of such navigation systems as an essential military component, forcing military powerhouses to compete further and faster. Galileo’ motivation, however, is partly military, partly commercial, and partly pride. Satisfying the commercial motivation is a factor that, in my opinion, could hinder the timely progress and success of Galileo. The one-country support of GPS and GLONASS seems to have expedited the decision-making process. Galileo has scattered decision-making centers but seems to be resolving this disadvantage quickly.
Galileo Opportunities. From the technical side, I do not see any fundamental problem for the interoperability of GPS, GLONASS, and Galileo. GPS and GLONASS signal structure differences are much more drastic than those of GPS and Galileo. Yet we were able to circumvent GPS-GLONASS technical issues relatively easily. The amazing opportunity is the fact that, with Galileo on the horizon, all existing receivers will be obsolete in a few years, and the challenge of competing to make the best user equipment is enormous. I am excited to begin this new round of competition as soon as technical issues and specifications are finalized.
The competitive, historical, and technical aspects of Galileo help create the face of the future of navigation. GPS is already an established system. It will continue to improve and serve as the backbone of navigation systems for many years to come. GLONASS, too, is halfway there. Russia has strong motivation to complete and support it, and with the price of oil at the current level, it will prove to be a strong competitor sooner than we may think. The recent launch of three GLONASS satellites is a good signal. Galileo is starting solidly. Will China create a fourth navigation system? It has the need to support its military operation and markets and has the financial might to pay for it. I cannot imagine a fifth system, at least not in this century. Multiple navigation systems operating independently help increase public awareness and confidence and open and expand markets quickly.
A key factor in the success of GPS was the cooperation between GPS authorities and manufacturers. Technical details were readily available to all GPS manufacturers worldwide. In 1983, during development of the first generation of GPS receivers at Trimble, I had daily phone conversations with then Captain Karl Kovach at the GPS Control Segment to ask questions and give him feedback on GPS satellite performances that I was observing. Availability of cost-effective high-quality receivers brings the fruits of the system to the world.
A gentleman from a GLONASS-related institute recently described the status of GLONASS as “ constellation of 14 satellites and many thousands of Javad receivers.” Generously giving me credit for my past activities, he also pointed to the importance of open, unbiased cooperation within industry. I hope Galileo’ commercial structure and objectives allow all of us to compete to develop user equipments of the highest quality and lowest cost.
For the recent launches of Galileo and three GLONASS satellites, congratulations to all of us civilian users!
Defense Science Board Report — More Changes Called for in “ Future of GPS”
“ importance of consistent, persistent, tenacious leadership (Real Leadership with a capital L) . . . underpins the report and comes out in the discussions and recommendations regarding governance and responsibility.”
The Defense Science Board (DSB), an independent federal advisory committee to the U.S. Department of Defense, has released its task force report evaluating the state of the Global Position System and recommending substantial changes in the ongoing modernization program. Completed on October 28, “ Future of the Global Positioning System” was made available publicly on November 22. While much of the 109-page document (downloadable at www.acq.osd.mil/dsb/reports/2005-10-GPS_Report_Final.pdf) deals with technical aspects of GPS modernization, its most profound and potentially far-reaching changes deal with governance and leadership.
This comes at a timely juncture, as the U.S. Air Force weighs risks and benefits of breaking the GPS III next-generation effort into separate space and control segment contracts. But the report will roil the already-turbulent waters — it has already — as it urges deeper re-examination and more radical changes to tenets that may previously have been held unshakable. It furthers sounds a ringing alarm on the unhealthy and vulnerable state of the satellite constellation and the overall system.
Notwithstanding the Presidential National Security Policy Directive on Space-Based Positioning, Navigation, and Time (PNT) of December 2004, replacing the Interagency GPS Executive Board with a higher-level National Space-Based PNT Executive Committee, the DSB task force declares that substantial gaps in program oversight, direction, commitment, and funding persist under this makeover. The report’ executive summary states that “ far, the U.S. government has not made use of a comprehensive strategy accounting for all the national equities at stake in the resolution of issues affecting acquisition and operation.”
One knowledgeable observer with a long history of program involvement opined “ cannot overemphasize the importance of consistent, persistent, tenacious leadership (Real Leadership with a capital L) that is knowledgeable and aware of the capabilities and contributions of GPS and willing to take a personal stake in actually fixing the problems identified in the report, not just talking about them. That includes policy Leadership at OSD and operational Leadership exercised through STRATCOM to ensure the best possible GPS service is provided to all end users. That idea underpins the report and comes out in the discussions and recommendations regarding governance and responsibility, but somewhat muted, unfortunately.”
Background
Chartered in April 2004, the DSB task force on GPS had as its first assignment a recommendation on U.S. government response to the development of Galileo by the European Union (EU). Upon the signing of the EU/U.S. agreement on Galileo and GPS in June 2004, the group expanded its scope to take on a full-scale review of GPS program status, future direction, and needs.
The task force was led by co-chairs James R. Schlesinger, a former secretary of defense, secretary of energy, and director of the Central Intelligence Agency, and Robert J. Hermann, a former deputy assistant secretary of defense for communications, command, control and intelligence, former assistant secretary of the Air Force for research, development and logistics, and former director of the National Reconnaissance Office. Ray Swider, Assistant for GPS, Positioning and Navigation in the DoD (and author of the Directions essay “ GNSS Become a Reality?” in last month’ issue of this magazine) served as executive director for the task force.
Control Segment
The task force believes the GPS Operational Control Segment (OCS) “ been seriously neglected” in recent years as acquisition attention has focused on GPS satellites and signal structure. OCS consists of a software-intensive Master Control Station (MCS) at Schriever Air Force Base, connected to a global network of monitor stations and uplink antennas. With a number of delivery delays, contractor changeovers, and incompletely addressed problems in system software since the early 1990s, the report finds that OCS “ operates with a combination of commercial off-the-shelf (COTS) and uniquely modified COTS products that are minimally adequate for maintaining system integrity.”
Compounding these chronic software problems, “ Force Space Command has routinely deferred equipment maintenance and modernization of the monitor stations and ground antennas.” The Air Force recently terminated work for new software version necessary for operation of new L2C, L5, and M-code signals onboard the Block IIR-M and IIF satellites, and, eventually, L1C. In the face of these continuing OCS development problems, the task force calls for a “short-term workaround” and “ it essential that new signals be activated on launch of each Block IIR-M and Block IIF satellite and made available at the users’ risk for testing and other applications, even if they cannot be declared operational until sometime in the near future.”
Attempting to engineer a solution to the long-standing OCS development problems, the report calls for parallel development of OCS functionality based on layered control engineering principles with clearly defined application programming interfaces between software components, “ than the current heavily patched software engineering methodology that has proven unworkable.”
Finally, “ ability of the control segment to absorb further new requirements and implement additional operational changes is non-existent within current resources. The Task Force believes new approaches are necessary as soon as possible to enable consistent and timely operation of improved in-space capabilities. In this regard, the Air Force should also reevaluate the practice of a totally blue-suit operation at the MCS.” Specifically, the authors want contractor technical personnel selectively integrated into positions involving direct satellite system monitoring and command execution. While mitigating the disruptions caused by personnel turnover that are chronic within the armed forces and providing a long-term, experienced cadre of GPS operators, this “” bring the side benefit of reduced cost.
Anti-Jam
The DSB report examines current and planned anti-jam capabilities and makes detailed technical recommendations for new and interim measures that are beyond the scope of this news story. GPS World will publish an in-depth examination of these aspects in an upcoming issue. Briefly, although improved anti-jamming capabilities are scheduled for GPS III (the first GPS III spacecraft is scheduled for launch in 2013, a date already moved back more than once), the task force believes those efforts may be insufficient to counter existing threats, particularly if further delays in GPS III occur. “ risk in the GPS III program is real and its extended procurement schedule leaves an intolerable window for jamming vulnerability.” The reports wants new anti-jam enhancements installed as soon as possible in military receivers to reduce this risk, and repeatedly states that anti-jam solutions are known, but implementation lags need.
Constellation Shortfall
In a radical revamping of the space segment, the report recommends switching from a six-orbital-plane structure to one of three orbital planes of 10 satellites per plane, stating that at least this many is necessary in order to create enough coverage to support ground operations and sustain the overall constellation. To reconfigure thusly, the authors state that the shift to a three-plane constellation must occur before any next-generation satellites are launched — that is, not waiting for the GPS III launches. The task force further recommends two next-generation satellites be launched at a time on a medium-class launch vehicle, to keep costs and weight down.
Galileo’ schema calls for this same three-plane configuration, and the DSB report reminds readers that “ original GPS constellation design was a three-plane configuration; the six plane design was only adopted when the satellite count dropped to 18 and coverage had to be spread more thinly.”
Currently, there are 28 satellites in orbit, but with failures, the report states the constellation likely will fall closer to 24 satellites in the 2007-2012 time period, and that the Air Force only has committed to maintaining 24 satellites in the long term. According to the report, there are eight GPS IIR-M satellites and 19 GPS IIF satellites in the pipeline — although only 12 IIFs are on contract, not 19 — and the report uses the 19-satellite figure to calculate potential satellite shortfall.
A knowledgeable source from industry stated “ agree with the vast majority of the report, though I can certainly quibble over technicalities of the three-plane option, which is really driven by dual manifest [the launching of two satellites on one rocket]. This has been trade-studied to death in the past. Short of a breakthrough or a major decrease in capability (and this does not coincide with additional signal strength or spot beam, much less benefit cost and schedule), it will not happen.”
Too Heavy. The task force believes the secondary payloads envisioned for GPS III are not affordable in terms of cost and weight, and calls for their re-evaluation.
“ the satellite exceeds weight or power thresholds that would compromise dual-manifest (maintain sufficient margin for each through development), the removal of secondary payloads must be evaluated. In this instance, NDS mission modifications and alternatives must be explored.”
Further “ regional signal (broader beam) should be considered as a lighter-weight and less complex alternative to the narrow spot beam planned for GPS III.”
One of the more intriguing proposals in the DSB report calls for a sort of hybrid constellation, though details were not provided.
“ a part of the acquisition strategy for GPS III, include the option to procure higher power earth-coverage satellites without non-GPS payloads to permit operation of a mixed constellation of higher-cost, high functionality satellites and lower-cost, utility satellites, increasing signal robustness and availability while lowering overall constellation life cycle costs. This will also provide significant global mitigation for GPS against both intentional and unintentional interference.”
Regarding Galileo
In its focus on challenges within the GPS program, the task force does not forget its original assignment, to evaluate the European satellite navigation program and recommend responses to it. The authors urge the government to “ open” to the nascent system and to opportunities for cooperation. Specifically, to “ promote true civil interoperability — well defined geodetic and time transformations that can be easily implemented in user equipment,” and, critically, to “ on full disclosure of the open signal structure.”
Organization and Governance
In its executive summary, the DSB report calls out these issues, which it then addresses in the body of the report and makes the focus of its perhaps most telling recommendations:
· GPS serves broad and crucial national purposes
· Perception of military dominance in governance
· Need to assess viability of alternative governance structures
· Comprehensive national strategy has been lacking
· Responsibilities and authorities for GPS in DoD need clarification.
While many of the specifics of the recommendations that close out the report dive into layers of bureaucratic administration, the report authors clearly signal that, even with last winter’ elevation of GPS oversight to the deputy secretary level with establishment of the National Space-Based PNT Executive Committee, the time for re-examination and restructuring has not yet passed. The DSB task force authors call for a more rigorous overhaul and clearly imply that GPS still does not receive the requisite level of attention and prioritization due to a “ of critical importance to essentially all aspects of U.S. life and well beyond the scope of any single Department.”
They conclude: “ in consideration of this specific definition of accountability and responsibility, policy and operational responsibilities for GPS within the DoD have been diffused by various management decisions over the last several years. The sometimes overlapping, sometimes-disconnected roles of the Office of the Secretary of Defense staff components, the Joint Staff and the Air Force in the management of GPS have created considerable confusion over where responsibility for GPS actually rests. This sense of confusion has also impacted civil and international perceptions of the importance the U.S. places on GPS and the commitment of the U.S. to GPS sustainment and evolution.
“ is incumbent on the Secretary of Defense to redefine lines of authority and responsibility for the system and to reestablish the DoD position of leadership for GPS as the heart of the space-based PNT infrastructure both domestically and internationally. The Task Force recommends that the DoD remain the steward for all GPS satellite services and considers it vitally important that GPS responsibilities within the Department be clearly assigned and described. The Task Force recommends that the Secretary of Defense provide such clear guidance applicable to the full range of military and civil GPS signal services in the future.”
Agreement on Galileo Facilities
In a major step forward for the European satellite navigation system, breaking a logjam that had threatened to push the program into dysfunction, the Big Five nations have struck a deal on location of system facilities necessary for successful deployment and operation of the Galileo program.
France will host the headquarters of the Galileo concession in Toulouse, the site of its own national space agency. The operations company will reside in London, United Kingdom. The two control centers (constellation and mission) will set up in Germany and Italy, as will two performance evaluation centers supporting the concession headquarters. Spain will host facilities to provide redundancy, related to Galileo safety-critical applications, for the control centers.
A new, as yet unidentified consortium of German companies will join the Eurely/iNavsat consortium, adding their core competencies to the concessionaire.
The agreement follows and reaffirms a financing consensus reached last month, which channeled a much-needed E200 million to the program and ensured the first satellite launches, but left dangling the key question of the income-generating facility locations. A European Commission-appointed mediator was rushed in to resolve the impasse in time for the December 5 Transport Council meeting. While further issues and correlative funding for later phases remain unsettled, this agreement clears the way for concession partners to finalize the concession contract with the Galileo Joint Undertaking.
Safety of Life. In a separate development, NovAtel Inc. of Calgary, Alberta, Canada, received a contract from CMC Electronics Inc., to undertake development of a Galileo Safety of Life (SoL) demonstrator receiver for the Canadian Space Agency (CSA). Galileo plans to offer the Safety of Life Service as a benefit to users equipped with Galileo-compatible receivers. NovAtel will develop a new Galileo E5a/E5b receiver section for addition to the existing Galileo Test Receiver, previously developed for the CSA under a Space Technology Development Program contract awarded in September 2004.
The Defense Science Board recently released the long-awaited report of its Task Force on the Future of the Global Positioning System. The Task Force conducted its deliberations during the latter half of 2004 and early 2005, a period of significant behind-the-scenes activity bearing on GPS. These activities included international negotiations and agreement, national policy discussions on GPS management, and considerations affecting GPS governance. After a lengthy Department of Defense internal review process, the report was approved for public release in October.
The Task Force itself represented a remarkable confluence of talent, including experts in GPS design, in military, civilian, and scientific applications of GPS, and in the inner workings of military, government, and industry operations. The insights and guidance of its co-chairs, Dr. James Schlesinger and Dr. Robert Hermann, with their unique combination of experience and personal credibility, lent enormous gravity to the undertaking. Their product illuminates in many ways the critical role GPS plays in our world. As an opening premise, proved throughout the report, it notes that “GPS is vital to the United States and to the DoD because, as a fundamental information system, it provides a common thread of precise position and time throughout our national security and economic infrastructures.”
One can remember many previous boards and committees that issued recommendations for GPS, and may have built a semblance of awareness but didn’t lead to tangible action. The result, noted from the beginning by the co-chairs, was that the apparently healthy GPS program wasn’t really all that healthy and that the malaise affected virtually all aspects of the program. They urged and the Task Force responded with discussion and findings specifically intended to be actionable and to address the underlying causes of the malaise, which are rooted in long-standing institutional factors that will require reinvigorated leadership and persistent follow-up to correct.
The Task Force noted a general lack of awareness of GPS role in the national infrastructure on the part of senior leaders in all areas of government. Although many people are aware of narrow aspects of GPS performance in individual applications, very few are truly aware of the breadth of GPS contributions to the national security and economy, nor of the enabling effects GPS has on critical national infrastructures. The Task Force viewed raising that awareness level among the nation’s senior leadership as key to addressing some of the other problems facing the program. Many of the other problems derive from lack of or misplaced management attention that allowed the components of the system to become unsynchronized.
Unbalanced attention to satellites at the expense of operational control functions and user equipment, annual diversion of funding from GPS to other programs, and delays among all the services in programming funds to equip military forces with improved user equipment are all symptoms of incomplete understanding of the role of GPS in military missions in general. Delays in making new signal capabilities available to users and reluctance to incorporate civil information sources into GPS constellation management are symptoms of incomplete understanding of the role of GPS in domestic and international civil infrastructures. Dilution of and uncertainty about policy and operational authority and responsibility for GPS are symptoms of insufficient appreciation among the most senior leaders for the critical importance stable, coherent policies and clear lines of communication represent to the consistent operation of GPS as a national resource and international utility.
This was a full slate of weighty issues, and the Task Force members addressed each in their discussions and findings. The report of their efforts has now been published (www.acq.osd.mil/dsb/reports/2005-10-GPS_Report_Final.pdf) and is being briefed at the highest levels of the Defense Department and in other government offices.
The recommendations it contains can serve as a prescription to make the Global Positioning System more healthy, robust, and vibrant for all of its military and civilian users and applications around the world. But the prescription will only be effective if the report’s messages are received, understood, accepted, and acted upon by those charged with the responsibility to maintain GPS viability. One cannot overemphasize the importance of firm and systematic implementation of the recommendations coupled with focused, dedicated, and persistent follow-up. Otherwise, this uniquely capable and credible Task Force will have seen its efforts wasted and its findings will become just another report.
Given the undeniable importance of GPS to both the national and international security and economy, that would be a monumental tragedy.
Jules G. McNeff served for several years in the Office of the Assistant Secretary of Defense and was responsible for DoD navigation systems policy and overall management and oversight of the GPS program. He subsequently worked at SAIC and NASA before joining Overlook Systems Technologies as vice president for strategies and programs. He became a charter member of the Editorial Advisory Board of GPS World in 1990.
“There are three kinds of lies: lies, damn lies, and statistics.” So reportedly said Benjamin Disraeli, prime minister of Great Britain from 1874 to 1880. And just as the notoriously wily statesman noted, the science of analyzing data, or statistics, sometimes yields results that one can interpret in a variety of ways, depending on politics or interests. Likewise, we in the satellite navigation field interpret results depending on the information we wish to produce: Using various statistical methods, we can create many different GPS and GLONASS position accuracy measures. It can seem confusing, even misleading, but as we’ll see in this month’s column, there’s some rhyme to our reason. We’ll examine some of the most commonly used accuracy measures, reveal their relationships to one another, and correct several common misconceptions about accuracy. Our author is Frank van Diggelen of Ashtech, Inc., in Sunnyvale, California. Van Diggelen is the OEM (original equipment manufacturer) and navigation products marketing manager.
“Innovation” is a regular column featuring discussions about recent advances in GPS technology and its applications as well as the fundamentals of GPS positioning. The column is coordinated by Richard Langley of the Department of Geodesy and Geomatics Engineering at the University of New Brunswick, who appreciates receiving your comments as well as topic suggestions for future columns.
Root mean square (rms), twice the distance root mean square (2drms), circular error probable (CEP), spherical error probable (SEP), so on, and so forth — Why do we have so many different position accuracy measures? The answer lies in the fact that the errors of position coordinates determined using a GPS or GLONASS unit are not constant — they vary statistically. If you observe the reported position of a stationary receiving system over time, you will notice it wanders. Graphing these moving points yields a “scatter plot”; how you analyze the scatter depends on the information you want to obtain. To complicate matters, the position is fundamentally three dimensional, but not everyone is interested in obtaining three-dimensional accuracy. One user might care about horizontal accuracy, another might want vertical. Thus, clearly, we must consider different accuracy measures.
Before we take a look at some of the common accuracy evaluations and their relationships to one another, we must say a word about the meaning of accuracy itself. To ascertain how accurately a system has determined a point’s coordinates, you must know the point’s true coordinates. Typically, this comes from measurements made using a system with an inherently higher accuracy than the one being tested. Simply averaging a system’s reported positions will provide an indication of system precision or repeatability, but the measurements might contain a bias that could affect the results. So, when we talk about system accuracy, we must consider the possibility of such a mean error.
POPULAR ACCURACY MEASURES
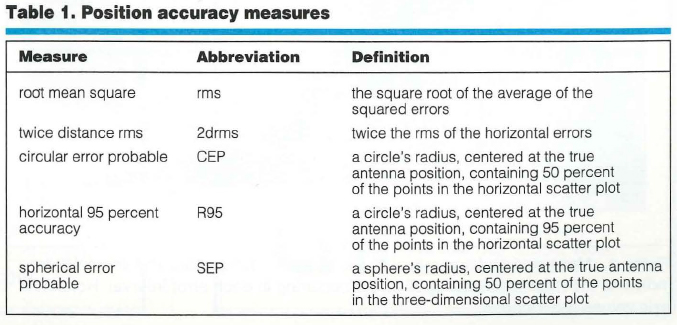
Table 1 lists the most commonly used GPS position accuracy measures and their definitions. Note that the first two methods are explained in terms of average squared error, and the last three are defined directly from the position error distribution (the scatter). Thus, we can immediately associate these last three with error probabilities. If we assume that the error distribution along any axis (east, north, or up) is “normal” or Gaussian, then we can also derive probabilities associated with the rms and 2drms accuracy measures. [The normal or Gaussian distribution is the one to which the dispersion of the sum of a very large number of very small errors always converges. The famous German polymath Carl Friedrich Gauss used this distribution to develop his error theory in the early nineteenth century. To honor the importance of this and the scientist’s other accomplishments, Germany features a portrait of Gauss and his probability distribution on its 10-mark bank note. — R.B.L.]
Data: Frank van Diggelen
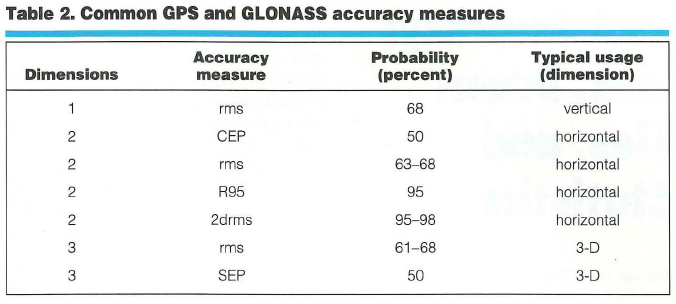
Table 2 shows how the accuracy measures are used and what probabilities can be associated with them. Note that the probability associated with rms depends on whether one is using rms in one, two, or three dimensions (1-D, 2-D, or 3-D). The later “Common Misconceptions” section discusses this further.
Data: Frank van Diggelen
Ascertaining Accuracy: An Example. Now, suppose you are comparing the specifications of two positioning systems. One unit has a quoted accuracy of 3 meters (3-D rms) and another has a quoted accuracy of 2 meters (CEP). Which system is more accurate?
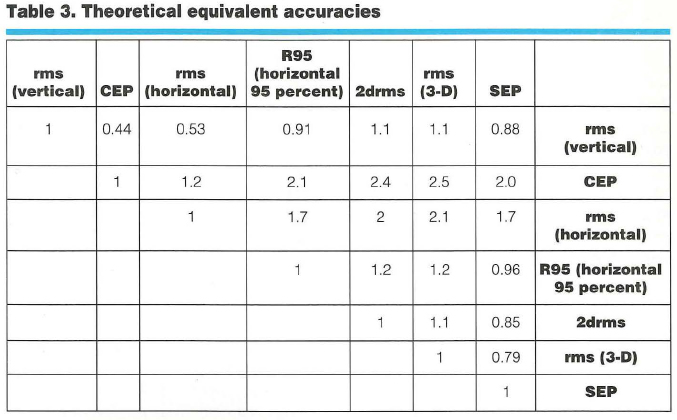
By making three assumptions about the ratio of east, north, and up errors, we can relate different accuracy determinations to each other, as shown in Table 3 (entitled “Theoretical Equivalent Accuracies”).To use that table, identify the desired measure in the top row and the original measure in the right hand column. Take the number in the cell at which the row and column intersect and multiply it by the original measure value to yield the desired number.
Data: Frank van Diggelen
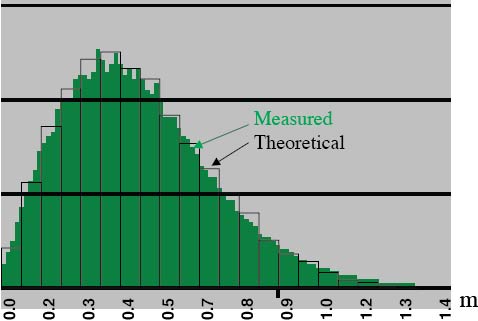
The three assumptions, from which the conversion values derive, are true on average. First assumption, the error distribution is Gaussian. Second, the ratios of the position dilution of precision (PDOP) to the horizontal DOP (HDOP) and the vertical DOP (VDOP) to the HDOP are 2.1:1 and 1.9:1, respectively. Third, the horizontal error distribution is circular. These suppositions are based on simulations performed over a grid covering the entire globe between latitudes 66 degrees south and 66 degrees north. In general, horizontal distributions are elliptical, the ellipses are often very close to circular, and the circular Gaussian distribution model is very good at estimating the true distribution, as shown in Figure 1.
To answer the question posed earlier (which is more accurate — a 2-meter [CEP] or a 3-meter [3-D rms] system?), follow these four steps:
Go down the “rms (3-D)” column to the “CEP” row.
The entry in this cell is 2.5.
According to the table, rms (3-D) =2.5 3 CEP.
So, CEP = rms (3-D)/2.5 = 3/2.5 =1.2 meters.
Thus, a system with 3-D rms of 3 meters will have a CEP of 1.2 meters and is, therefore, more accurate than a system with a CEP of 2 meters.
For specific details about how we created Table 3, see the “Deriving the Equivalent Accuracies Table” sidebar on the last page of this article.
Making Valid Assumptions. To understand the table in more general terms, one must realize that the three assumptions and the table are valid for the average measurement. This means that if someone takes measurements all day, then, on average, the different accuracies are related by the numbers in the table. At any instant, however, the satellite geometry may produce a different relationship between various accuracies (for example, between vertical and horizontal). But the best way to make a comparison, seemingly, is to use average relationships.
Starting a Small Test. In any specific example, the table entries are apparently good to within 620 percent. That is, if the table says 2drms = 1.2 3 horizontal 95 percent, then a particular experiment may show 2drms to be anywhere from 0.96 to 1.44 3 horizontal 95 percent.
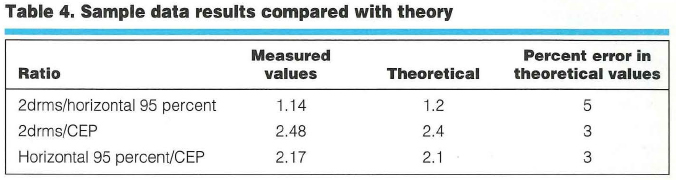
To evaluate Table 3’s efficacy, we used data from more than 550 hours (2 million data points) of differential GPS positions (DGPS), obtained with a U.S. Coast Guard reference station providing the differential corrections. Our results were 42 centimeters CEP, 91 centimeters horizontal 95 percent, and 104 centimeters 2drms. Table 4 shows how these results compare with Table 3’s theoretical values.
Data: Frank van Diggelen
Closing the Circle. The circular Gaussian distribution model for horizontal errors is surprisingly good. Figure 1 portrays a histogram (in green) generated from the DGPS data. These data have a horizontal rms value of 0.52 meter. Overlaid on the green histogram is a bar graph, showing the theoretical histogram that would be obtained from data that truly were circularly distributed and Gaussian and that had the same horizontal rms as the measured data. As the figure shows, the measured and theoretical distributions agree extremely well. We can obtain similarly good fits for vertical error distributions modeled as 1-D Gaussian.
Figure 1. Measured and theoretical horizontal error distribution. The vertical axis indicates the relative frequency of errors occurring in each error interval. Horizontal axis values are rounded. (Data: Frank van Diggelen)
COMMON MISCONCEPTIONS
By now, one may feel that accuracy measures are rather simple to understand. Still, general discussions about GPS and GLONASS position accuracies frequently contain several misconceptions. Here’s our attempt to set the record straight.
Misconception Number 1 — rms precisely equals one sigma (1s or 1 standard deviation). Well, actually this is true, as long as the mean error is zero. With most GPS or GPS/GLONASS systems, the mean errors (over a sufficiently long time interval) are zero, or close to zero, and so rms may be considered essentially equivalent to one sigma.
Misconception Number 2 — 2drms means “two-dimensional rms.”In fact, 2drms usually stands for “twice distance rms,” in which the “distance” is measured in a 2-D space, the horizontal plane. Thus, 2drms is a very confusing abbreviation: It is a two-dimensional measure, but the “2d” usually stands for twice distance. (Some publications about navigation accuracies, notably those issued by the North Atlantic Treaty Organization, use the alternative meaning of “2d.” Thus, their “2drms” is exactly one-half of the usual measure.)
Misconception Number 3 — 2drms is exactly equivalent to a 95 percent probability level. This untrue belief stems from the fact that, for a 1-D Gaussian distribution, 95 percent of it lies inside an interval from 2s to +2s. However, 2drms is a measure for a 2-D distribution. The percentage of scatter lying within a circle with radius equal to 2drms depends on the distribution shape. For a circular distribution, the percentage of scatter inside a 2drms circle is 98 percent. The “Deriving the Equivalent Accuracies Table” sidebar shows this. As the scatter becomes more elliptical (with different error distributions for the two horizontal coordinates), it also becomes more one-dimensional, causing the percentage of elliptical distribution values inside a 2drms circle to tend toward 95 percent.
For GPS units, when the whole sky is visible above a 10-degree mask angle, scatter is approximately circular. Typically, distributions become very elliptical when HDOP gets large (much greater than 1). Thus, for any GPS receiver in any environment, the circle with a radius equal to 2drms contains between 95 and 98 percent of the scatter. When HDOP is low, the percentage is closer to 98 percent; when HDOP is high, it is closer to 95 percent.
Misconception Number 4 — rms is perfectly comparable with a 68 percent probability level. This is true for only 1-D Gaussian distributions. For 2-D or 3-D Gaussian distributions, the percentage of the values distributed inside a circle (or sphere), with a radius equal to the rms value, depends on distribution shape.
Misconception Number 5 — The error distribution really is Gaussian.We use the assumption that the error distribution is Gaussian for analytical purposes, and over time, one can show that a circular Gaussian distribution can model the errors very well (see Figure 1). However, certain errors may not have a Gaussian distribution:
Stand-alone GPS errors are dominated by selective availability. Because this is an artificial error source, the errors it contributes are not always Gaussian.
Stand-alone GPS/GLONASS errors show distributions that match Gaussian distributions quite well (to about 10 percent) over a time period of, say, several hours.
Differential errors over a long time
display distributions that match Gaussian patterns to within a few percent. This is true for both code differential and carrier-phase differential (commonly referred to as real-time kinematic, or RTK). Differential errors over a short time produce scatter dominated by multipath, which is fairly constant over a few minutes, and, hence, the distribution is distinctly non-Gaussian.
IN CONCLUSION
As Disraeli also noted, “An investment in knowledge pays the best interest.” We hope that this brief note has proven to be a worthwhile “investment” to readers, shedding light on the sometimes murky subject of accuracy measures used in GPS and GLONASS positioning. With the simple information provided, you should be able to compute the positioning accuracy of a system in a variety of measures and also, contrary to the old adage, be able to compare “apple A” with “orange B.”
Further Reading
For an introduction to the statistics of GPS accuracy measures, see
“The Mathematics of GPS,” by R.B. Langley in GPS World, Vol. 2, No. 7, July/August 1991, pp. 4550.
For an extended mathematical description of position errors, see
“Navigation Errors,” Appendix Q of American Practical Navigator: An Epitome of Navigation, originally by N. Bowditch, Vol. I, published by the former Defense Mapping Agency Hydrographic Center, Washington, D.C., 1977 or 1984 editions.
For positional error discussions from the war fighter’s perspective (but also relevant to noncombat applications), see
“Accuracy and Positional Error,” Appendix D of Naval Aviation Systems Team Mapping, Charting, and Geodesy Handbook, Version 2.0, by J.H. Harden, Jr., and Z.S. Willis, published by the Avionics Systems Engineering Department, Naval Air Systems Command, Arlington, Virginia, 1995. Available on the Internet at <http://www.nima.mil/publications/pub.html>.
‘Method of Expressing Navigation Accuracies,” NATO Standardization Agreement (STANAG) 4278, Edition 2, Military Agency for Standardization, North Atlantic Treaty Organization Headquarters, Brussells, 1986.
For an advanced discussion about the statistics of GPS positioning errors, see
“Random Variables and Covariance Matrices,” Chapter 9 of Linear Algebra, Geodesy, and GPS, by G. Strang and K. Borre, Wellesley-Cambridge Press, Wellesley, Massachusetts, 1997.
Deriving the Equivalent Accuracies Table
The function invchisq (p,2) computes the square of a circle’s radius such that the sum of squares of two random variables, each with rms = 1s = 1, has a probability p of falling inside the circle. This function allows users to relate rms to probability for a two-dimensional circular distribution.Comments are shown in curly brackets “{}.” Table 3 (about equivalent accuracy) contains entries with resolution of only two digits. It is impossible, in general, to provide more precise ratios, because the three initial assumptions are averages over the whole world, and, thus, are good only to within a few percent of error in any particular region.rms (vertical) = 1.9 3 rms (horizontal) {using VDOP/HDOP = 1.9}
(1,3) entry = 1/1.9 = 0.53
(1,5) entry = 2 3 0.53 = 1.1CEP = 50 percent circle {first solve for CEP = x 3 rms (horizontal), then use that result to derive other ratios}
rms (horizontal) = (check)2 3 rms (linear) {assuming a circular distribution}
R = sqrt(invchisq ( 0.5,2)) = 0.83 3 (check)2 => CEP = 0.83 3 (check)2 3 rms (linear) = 0.83 3 rms (horizontal)
(2,3) entry = 1/0.83 = 1.2
CEP = x 3 rms (vertical) = x 3 rms (horizontal) 3 1.9 = 0.83 3 rms (horizontal) => x = 0.83/1.9 = 0.44
(1,2) entry = 0.44R95 = 95 percent circle {first solve for R95 = x 3 rms (horizontal), then use that result to derive other ratios]
R = sqrt(invchisq (0.95,2)) = 1.73 3 (check)2 =>
R95 = 1.73 3 (check)2 3 rms (linear) = 1.73 3
rms (horizontal)(3,4) entry = 1.7R95 = x 3 rms (vertical) = x 3 rms (horizontal) 3 1.9 = 1.73 3 rms (horizontal) => x = 1.73/1.9 = 0.91
(1,4) entry = 0.91R95 = 1.73 3 rms (horizontal) = 1.73 3 CEP/0.83
(2,4) entry = 1.73/0.83 = 2.1
2drms = 2 3 rms (horizontal) {by definition}
(3,5) entry = 22drms = x 3 CEP = x 3 0.83 3 rms (horizontal) =
x 3 0.83 3 2drms/2 => x = 2/0.83 = 2.4
(2,5) entry = 2.42drms = x 3 R95 = x 3 1.73 3 rms (horizontal) = x 3 1.73 3 2drms/2 => x = 2/1.73 = 1.16
(4,5) entry = 1.2