U-blox has debuted the ALEX-R5, a miniature cellular module that integrates low power wide area connectivity and GNSS technology into an ultra-small system-in-package (SiP) form factor.
According to u-blox, ALEX-R5 is based on the secure UBX-R5 LTE-M/NB-IoT chipset platform with out-of-the-box Secure Cloud functionality and the u‑blox M8 GNSS chip for world-class location accuracy.
The ALEX-R5 features a 14 x 14-mm footprint, achieved as a result of its SiP design. Its 23-dBm cellular transmission power guarantees end devices operate effectively in all signal conditions and a dedicated GNSS antenna interface that enables fully independent, simultaneous operation of the u‑blox M8 GNSS chip.
The ALEX-R5 is optimized for power-sensitive and battery-dependent applications, as well as size-constrained applications such as wearables and connected medical devices. It achieves this by leveraging the lower power modes of the u‑blox UBX-R5 and UBX-M8 chipsets and giving users options to further balance power consumption and performance using GNSS Super-E mode, u-blox said.
Its rugged SiP construction makes it a perfect fit for harsh environments, where moisture or vibration would be a concern for conventional modules. ALEX-R5 is rated at moisture sensitivity level 3, offering reduced handling and device production complexity, u-blox added.
Finally, the ALEX-R5 future-proofs IoT devices and solutions by enabling customers to software upgrade deployed devices for compatibility with 5G networks, u-blox said. This will offer a seamless transition to the next generation of cellular technology as 5G networks are rolled out by mobile operators.
Engineering samples of the ALEX-R5 SiP will be available by the first quarter of 2021.
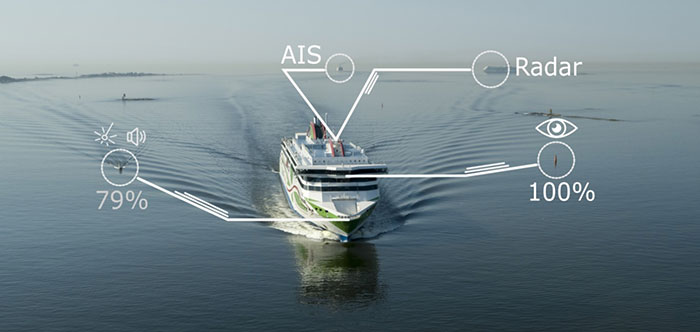
A day of ferry trips between Finland and Estonia became some of the best documented voyages in maritime history. Cameras, sensors, radio and satellite navigation receivers and even microphones recorded every instant of the crossings over the Baltic, gathering raw data for a new ESA-led project applying artificial intelligence (AI) to the situational awareness of shipping — as an important step to full autonomy.
The Tallink shipping company’s new 212.2 meter-long Megastar passenger and car ferry was fitted with data-gathering devices for its sailings on the busy stretch of sea between Helsinki and Tallinn.
The testing was overseen by a team from the Finnish Geospatial Research Institute (FGI) for an ESA project called Artificial Intelligence/Machine Learning Sensor Fusion for Autonomous Vessel Navigation, or Maritime AI-NAV.
“Our aim is to show how AI can be applied to achieve autonomous situational awareness, so that a ship can reliably sense its own environment,” said FGI’s Sarang Thombre.
Photo: European Space Agency
“Such autonomous systems would initially be deployed in support of human crews, for enhanced safety and efficiency – with crewless ships a much longer-term goal.
“The most experienced human ship captains will have the least trust in any single navigational device but will rather continuously cross reference between them. Similarly, our autonomous functionality will not be overly reliant on a single data source but combine and verify data from multiple sensors.
“Having gathered many gigabytes of data during our initial August field campaign, then again in October with more days planned in December, we are applying the results to train and test our data-fusing algorithms. A follow-up seagoing test will then verify their performance in practice.”
The Maritime AI-NAV team plans to employ a variety of sensor types, including satellite navigation receivers – also utilizing of Europe’s Galileo system — monocular and stereo cameras, standard radar, “laser radar” lidar and an array of microphones, along with “Automatic Identification System” radio signals. These AIS signals transmit position, size and routing information of all vessels above a certain class, as well as fixed infrastructure such as oil rigs or wind turbines.
“Satellite navigation lets the ship know where it is in the sea, while the other sensors let it know what is around it, which is essential for identifying and avoiding any obstacles,” Thombre said. “The different data sources operate across a variety of ranges — so radar and AIS provide longer range detection out to the horizon, while cameras and lidars come into their own at shorter distances. Plus we had a trio of microphones aboard the Megastar, determining the angle of arrival of sound from other ships. The challenge now is to fully integrate all these sources using machine learning, to build up a holistic picture.”
Maritime AI-NAV is supported through ESA’s Navigation Innovation and Support Programme, working with European industry and academia to develop innovative navigation technology.
FGI is joined in the Maritime AI-NAV consortium by Aalto University’s Sensor Informatics and Medical Technology group and maritime IT startup Fleetrange.
A new GNSS architecture aboard low-Earth-orbit (LEO) satellites is in development.
The patent-pending system architecture “is combining the efficiency and innovation of the new space era with the world of satellite navigation to help enable modern intelligent systems to operate safely in any conditions, anywhere on the planet,” according to a press release from Xona Space Systems.
Xona, a San Mateo-based startup, announced a service agreement to advance its 2022 Alpha mission. The agreement is with Momentus Inc., a commercial space company offering in-space infrastructure services.
Once complete, Xona’s LEO smallsat constellation will provide a resilient alternative to GNSS with more than 10 times better accuracy, Xona claimed.
“Xona is developing a truly innovative system to enhance the reliability and precision of global PNT and GNSS. As an infrastructure company, Momentus is excited to partner with other like-minded pioneers to help build out the future services needed to enable human presence in space while improving life on earth,” said Dawn Harms, Momentus CEO.
“We have been very impressed with the capabilities and services that Momentus offers with their Vigoride spacecraft,” said Xona CEO Brian Manning. “There is a rapidly growing demand for higher performance navigation and timing services as well as alternatives to GNSS. Forming this partnership with Momentus represents a key milestone in our technology development roadmap as we work towards our on-orbit demonstration and deployment of the full constellation to meet these needs.”
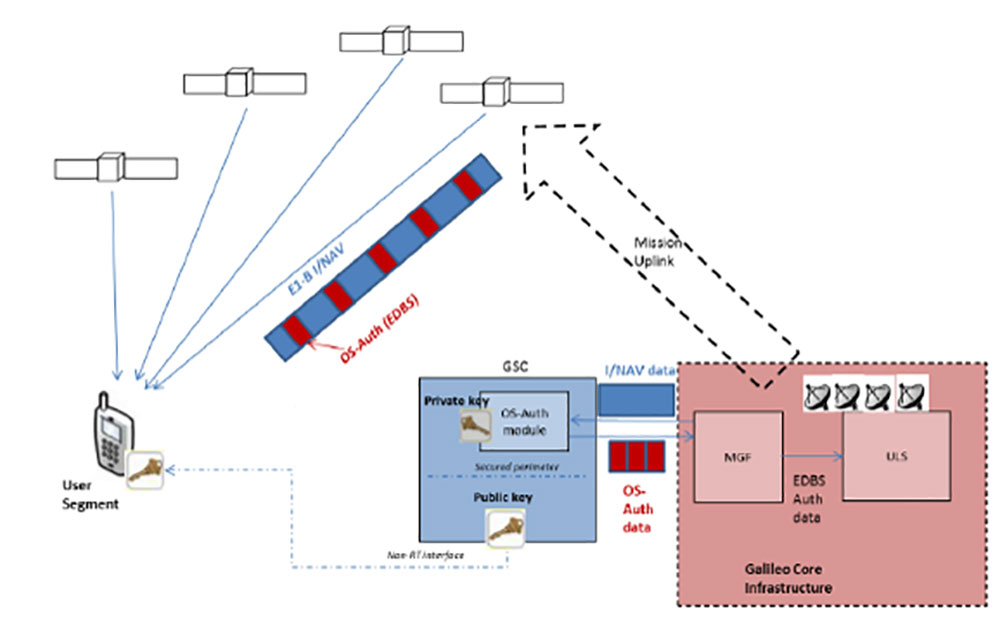
In a first for any satellite navigation system, Galileo has achieved the first position fix based on navigation signals carrying authenticated data, according to the European Space Agency.
Galileo’s Open Service Navigation Message Authentication (OSNMA) is intended as a way to combat malicious spoofing of satnav signals.
OSNMA receivers successfully calculated an OSNMA-protected position fix after Galileo satellites started transmitting authentication data at 15:28 UTC on Nov. 18, 2020. The first tests used eight Galileo satellites for around two hours on Nov. 18. Tests have continued ever since, for intermittent periods, and will continue over the next months ahead of a public observation phase.
The first authenticated signal position, velocity and timing fixes were made using a total of eight Galileo satellites for around two hours on Nov. 18, 2020. The tests represent a first proof-of-concept for an eventual operational service offering positioning with authenticated data to users. (Image: ESA)
Pioneering a long-awaited service
The Galileo OSNMA authentication mechanism allows GNSS receivers to verify Galileo information, making sure that received data are indeed from Galileo and not modified in any way.
“Ensuring the validity of positions elaborated by GNSS is one of the main challenges before addressing an entirely new set of applications demanding dependability and resilience,” said Matthias Petschke, director of space at the European Commission, DG DEFIS. “Galileo is now set on course to deliver on this highly anticipated feature and has many more novel features in store for the coming years.”
Testing is taking place at ESA’s Navigation Laboratory at ESTEC in the Netherlands, the same site where the first Galileo positioning fix took place in 2013.(Photo: ESA)
Increased robustness
OSNMA test signals are being broadcast by the Galileo constellation using the spare bits from the current navigation message, therefore not impacting the legacy OS receivers implementing the current OS Signal-In-Space Interface Control Document (OS SIS ICD).
“Galileo’s Open Service Navigation Message Authentication is one of its key differentiators,” said Rodrigo da Costa, executive director of the European GNSS Agency. “The additional robustness that it will provide to the Galileo signal will be critical for many applications, particularly those where security and trustworthiness are a priority, making the OSNMA a key component in any resilient PNT solution.”
OSNMA works on a comparable basis to everyday encryption, where sending a digitally signed document involves both sender and recipient using compatible cryptographic keys (private and public) to validate the document’s source of origin.
“Up until now, as a navigation satellite disseminates navigation and timing data, there is no way of confirming these data are indeed coming from their apparent originator,” explained Paul Verhoef, director of navigation at the European Space Agency. “As a result, the data could be falsified, a phenomenon known as spoofing, where corrupt false signals mislead receivers about their position, misleading their users in turn, with potentially serious consequences.”
An ESA Navigation Directorate team at the ESTEC technical centre in the Netherlands worked with their European GNSS Agency (GSA) counterparts at the twin Galileo Control Centres in Italy and Germany and the Galileo Service Centre (GSC) in Spain to develop and test the OSNMA.
Next steps
Upon successful completion of the internal testing phase, a public observation phase will begin, in which the OSNMA signal will be publicly accessible. In preparation for this phase, the OSNMA user Signal-In-Space Interface Control Document (OSNMA SIS ICD), receiver implementation guidelines, and the necessary cryptographic materials will be published. This will allow receiver manufacturers and application developers to test and prepare their products.
During the public observation phase, feedback will be gathered from users, leading to the consolidation of the service.
Testbed vehicle by ESA’s Navigation Lab. (Photo: ESA)
Photo: Philipp Berezhnoy/iStock / Getty Images Plus/Getty Images
According to a new research report, “GNSS Simulators Market by Component Type (Single Channel and Multichannel), GNSS Receiver (GPS, Galileo, GLONASS and BeiDou), Application (Vehicle Assistance Systems, Location-based Services and Mapping), Vertical, and Region — Global Forecast to 2025,” the market is estimated to grow from $106 million in 2020 to $165 million by 2025, at a compound annual growth rate (CAGR) of 9.3% during the forecast period.
Factors such as rapid penetration of consumer internet of things, the contribution of 5G in enabling ubiquitous connectivity and increasing use of wearable devices utilizing location information are expected to drive the adoption of the GNSS simulators hardware, software and services, the MarketsandMarkets report said.
Market segments
The report stressed several key points in regard to the hardware segment, automotive vertical segment and GPS segment.
The GNSS simulators market, by component, is segmented into hardware, software and services. Of these three, the hardware segment is expected to account for a larger market size in the coming years in the GNSS simulators market as it enables signal simulations and plays a key role in the simulation process.
The GNSS simulators market, by vertical, is segmented into military and defense, automotive, consumer electronics, aerospace, marine and other verticals (agriculture, construction, and rail and road). According to the report, the automotive vertical segment is expected to hold a higher CAGR during the forecast period in the GNSS simulators market.
“GNSS offers a cost-effective and accurate way of determining position in real-time,” the report said. “Ride-sharing apps, such as Uber and Lyft, car-sharing, usage-based insurance apps, dynamic toll charging and parking apps all depend on the real-time location of the car. GNSS offers sufficient accuracy for all these apps by providing location coordinates leading to its adoption in the automotive vertical.”
Next, GNSS receivers are segmented into GPS, GLONASS, Galileo, BeiDou and others, with the others comprised of NavIC and QZSS receivers. The satellite tracking service provided by GPS is useful in various commercial and personal applications. The increasing commercial application of GPS vehicle tracking system for taxi companies and cab services is contributing to the rising adoption of GPS location services. It makes the navigation easier by providing relevant details, such as distance and shortest route to the desired location, the report said.
Market size and location
North America is expected to have the largest market size during the forecast period, with the key factor favoring the growth of the GNSS simulators market in North America being the increase in technological advancements coupled with the rise in government support for the adoption of UAVs. The increasing number of players across different regions is also further expected to drive the GNSS simulators market globally, the report said.
In addition, Asia-Pacific is projected to grow at the highest CAGR during the forecast period, as it has witnessed considerable developments and adoption of solutions across the region. According to the report, Asia-Pacific has a large potential for GNSS and space-enabled applications, and it has a wide consumer base due to its booming economies accompanied by an increasing share of local R&D and technology innovations.
Major players
Major vendors in the global GNSS simulators market include Spirent Communications, Rohde & Schwarz, VIAVI Solutions, Hexagon, Keysight Technologies, u-blox, Orolia, Cast Navigation, Accord Software and System, IFEN, Racelogic, Syntony GNSS, Teleorbit, iP-Solutions, Pendulum Instruments, Saluki Technology, Shanghai Huace Navigation Technology, Averna, GMV NSL, Brandywine Communications, Jackson Labs Technologies, Hunan Shuangln Electronic Technology, Work Microwave, Qascom and M3 Systems.
integration with inertial measurement units (IMUs) and other sensors
positioning using cell phones and other consumer devices
any other areas or challenges they find particularly significant.
All four respondents in this issue, like to those in the January issue, report that they are making full use of the new GNSS signals available, taking hardware and software measures to counter jamming and spoofing, and integrating IMUs and other sensors with their GNSS receivers to help achieve continuous navigation and positioning in obstructed environments. In addition, they are continuing to develop mass-market applications, because high-precision positioning is becoming increasingly important for cellphones and wearable devices. For a fuller review of these trends, see my introduction to the first installment.
Notably, two of the companies featured in this issue, ComNav Technology and Unicore, are Chinese.
With Chad Pillsbury, Senior Director, Raytheon Intelligence & Space’s Resilient Navigation and Reconnaissance Solutions
Utilizing Galileo and BeiDou
Integration and fusion of multiple space position services is a key element in achieving assured positioning, navigation and timing (PNT). A combination of commercial and military-code navigation signals, when coupled with evolving sensors, provide more resilient methods of navigation and enable new concepts of operations related to PNT. Over the next two years, RI&S will customize these concepts of operation (CONOPS) for our United States and international allies to harness the power of fusion in resilience.
Dealing with jamming and spoofing
As threats to GPS continue to evolve and mature, RI&S continues to develop alternative navigation solutions, as well as GPS-capable receivers and antennas, aimed at defending against a variety of spoofing and jamming technologies. Our latest anti-jam, anti-spoof and high-precision solutions leverage a recent technology breakthrough that lowers size, weight, power and cost while boosting performance in the new M-code and alternative navigation applications.
Integration with IMUs and other sensors
IMUs are the cornerstone of high-performance navigation systems and will continue to be in the future. Recent innovations allow some systems to become more IMU agnostic, or even to consider microelectromechanical systems (MEMS) IMUs depending on performance, which can allow the customer greater flexibility and a more open architecture.
Positioning with consumer devices
RI&S sees 5G as a game-changing technology, with a lot of possibilities in the assured navigation market. We also look to cellphones as a great area of interest — especially for exploring unforeseen signals, considering human international models, and learning how the next generation of GPS users expect to see PNT information displayed.
Other significant challenges and opportunities
The future of GPS lies in a system-of-systems approach. Using time as a backbone, navigation systems can securely share time, data, position and intent across the network. Broadly, this approach can be used in civil, commercial and military environments. RI&S is fully focused on developing capabilities to achieve this ideal state.
Unicore Communications
With Gao Jingbo, Marketing Director
Utilizing Galileo and BeiDou
Most of Unicore’s high-precision products support all constellations and multiple frequencies. The new BeiDou 3 provides precise point positioning (PPP) service from three geostationary satellites via the B2b frequency, while Galileo offers up to five frequencies — E1, E5a, E5b, E5 AltBOC and E6. End users will benefit from improved PNT availability, reliability and continuity as access to those signals greatly reduces multipath effects and allows faster PPP convergence times.
Dealing with jamming and spoofing
To effectively deal with signal jamming and spoofing, it is important to know their sources. GNSS receivers also are susceptible to electronic interference and vulnerable to complex electromagnetic environments. Unicore integrates GNSS RF, baseband and algorithms into a single GNSS system-on-chip (SoC) that mitigates external interference. Joint time-frequency domain interference mitigation technology also is adopted in chip design.
Photo: Unicore Communications
Integration with IMUs and other sensors
Demand for seamless, accurate indoor-outdoor location is increasing. The integration of GNSS with IMUs, lidar, cameras and other sensors helps achieve continuous navigation and positioning in obstructed environments such as urban canyons and tunnels. Unicore offers receivers integrated with both high-end IMUs and affordable MEMS-based devices. Dual-frequency GNSS plus MEMS provides an ideal positioning solution for automotive applications.
Positioning with consumer devices
High-precision positioning is becoming increasingly important for cellphones and wearable devices, and multi-scenario adaptation is necessary. Instead of integrating standalone GNSS chips with smartphone processors, cellphone manufacturers prefer to cooperate with GNSS manufacturers through GNSS intellectual property (IP) licensing. To ensure high-precision service, better cellphone antennas are also important.
Other significant challenges and opportunities
We strive to deliver reliable, timely and smart positioning for anything, anywhere, anytime. Next-generation GNSS location products and services should be more end-user-friendly. The hardware interface will be more universal, flexible, configurable and adaptable with different algorithms for a diverse range of applications.
Teleorbit
With Daniel Seybold, CEO
Utilizing Galileo and BeiDou
Our GOOSE receiver has been able to use Galileo since its beginning and BeiDou since the forth quarter of 2020. Signals from both can be used individually or with other signals (GPS, Galileo, GLONASS and BeiDou, plus SBAS).
Dealing with jamming and spoofing
Open Service Navigation Message Authentication (OSNMA) is now implemented on the GOOSE, which helps mitigate spoofing attacks. GOOSE’s recording function enables users to record simulated jamming/spoofing attacks, and then analyze the behavior of the GOOSE and the received signals. We are developing various GNSS antenna arrays for nulling and beamforming, as well as a left- and right-hand circular polarized (LHCP/RHCP) antenna with GOOSE adaption for signal processing.
Signal conditioning on the GOOSE platform is based on a high-rate discrete Fourier transform (DFT)-based data manipulator algorithm, known as an HDDM algorithm, that fulfills multiple roles. The HDDM algorithm removes a wide range of interference signals, equalizes the spectrum, or restructures the spectrum.
Image: Teleorbit
Integration with IMUs and other sensors
We offer a GNSS antenna with an integrated IMU. Thanks to its open software interface, fusing IMU or other sensor data with GNSS data is easily done with GOOSE. Vector tracking, deep coupling and other sensor fusions (for example, 5G) are on the GOOSE roadmap.
Positioning with consumer devices
Our ongoing AMELIE project will study advanced techniques for the miniaturization and radiation enhancement of GNSS mass-market antennas to be applied in the design, manufacturing and testing of a multi-frequency, low-cost, high-gain dual circularly polarized antenna for the next generation of consumer devices. In 2021, we will build the following antenna demonstrators: single-frequency (L1/E1), dual-frequency (L1/G1/E1, L5/E5a/E5b) and multi-frequency (L1/G1/E1, L5/E5a/E5b, L2, E6).
Other significant challenges and opportunities
GOOSE can track the Galileo E5AltBOC (wideband) signal, which provides code-range variances below a few decimeters. This offers a significant increase in the accuracy of code measurements in terms of reduced noise and mitigation of multipath effects, compared to conventional signals. GOOSE will provide two different approaches for robust tracking: vector tracking for dealing with challenging environments where multipath occurs or buildings block signals, and adaptive tracking to allow the receiver to acclimate to its surroundings by adapting the bandwidth in the loop depending on movement, such as high dynamics.
ComNav Technology
With Min Xu, Director of GNSS Technology R&D Department
Utilizing Galileo and BeiDou
We keep up with the development of GNSS. Our new K8 series of high-precision GNSS modules support the recently completed BDS-3 and Galileo constellations concurrently, significantly improving positioning accuracy especially when signals are partially obstructed. Despite their complex design, the size of K8 modules decreased by almost 36% from their precursors and power consumption dropped to 1.0W, making them easier to integrate.
Dealing with jamming and spoofing
We have developed algorithms to eliminate specific forms of jamming and spoofing, with a focus on narrowband interference. The newly released Quantum III SoC chip — integrated with wideband signal-receiving technology, wideband and narrowband anti-interference technology, and anti-continuous wave interference technology — can provide high-quality observation information in a complex electromagnetic environment.
Photo: ComNav Technology
Integration with IMUs and other sensors
There is an increasing need to add IMUs to supplement obstructed GNSS signals. Empowered by a high-precision IMU, our N5 receiver supports tilt survey with accuracy of less than 2.5 cm. Users can survey without a centering bubble as its calibration-free tilt compensation protects it from magnetic disturbances. We are also focusing on image sensors, such as cameras and radars, to make data collection more flexible and reliable.
Positioning with consumer devices
Our high-precision products are mainly used in professional fields such as land surveying, deformation monitoring, and UAVs. We are continuing to explore GNSS products for consumer markets, which are sensitive to power consumption and cost. The upcoming M10 GNSS is a compact and portable receiver for mass-market applications, such as person or vehicle tracking and fleet management.
Other significant challenges and opportunities
GNSS technology can be widely applied in agriculture, transportation and infrastructure construction. We developed the AG360/AG360 Pro Agricultural Automatic Driving system, which drives autonomously without damaging crops. We collaborated with China Mobile to build more than 2,000 CORS stations to provide high-precision positioning services in support of smart-city construction, IoT and location-based services.
Alliance membership has tripled in past 13 months as the organization grows advocacy for ever-increasing importance of GPS technologies to the global economy.
L3Harris Technologies, a global aerospace and defense technology innovator, joins a core of companies committed to furthering GPS innovation, creativity and entrepreneurship.
As the newest member, L3Harris Technologies will work with GPSIA to promote the modernization of GPS and its impact on military operations, economic growth and technological innovation.
J. David Grossman
“With the addition of L3Harris, the alliance welcomes a company recognized globally for developing and advancing innovative uses of GPS to protect our nation’s national security,” said GPSIA Executive Director J. David Grossman. “Having now tripled membership over the last 13 months, GPSIA is in a position of strength to continue leading advocacy for the promotion, protection and enhancement of GPS, both in the U.S. and around the globe. L3Harris Technologies is an integral part of the deployment of next-generation GPS III satellites and we look forward to working with them to ensure this technology remains the gold standard for delivering positioning, navigation and timing functions to our military as well as a wide range of other sectors, including transportation, agriculture, electricity and finance.”
L3Harris Technologies has played an integral part in the story of GPS, as it has provided navigation technology for every U.S. GPS satellite ever launched. L3Harris Technologies is developing 10 GPS III satellite navigation payloads for the U.S. Air Force’s GPS III satellite program, four of which are already operational.
The company will also provide navigation payloads with fully digital Mission Data Units (MDU) for the U.S. Air Force’s GPS III Follow-On, known as GPS IIIF, satellites. The MDU will provide even more powerful signals and ensure flawless atomic clock operations.
“GPS technology is an important part of the modern world and critical for the warfighter,” said Joseph Rolli, L3Harris Technologies Positioning, Navigation and Timing.
“With more than 40 years of experience developing GPS technologies, L3Harris aims to continue to improve the system with a more powerful, reliable, and flexible signal. We look forward to joining GPSIA and its other industry leading members as we advocate for continued support of this incredible system,” Rolli said.
The Institute of Navigation (ION) has announced the new members of its Executive Committee, Council and Standing Committee Chairs following its Annual Awards during the ION International Technical Meeting and Precise Time and Time Interval Systems and Applications Meeting, both held virtually Jan. 25-28.
The ION Executive Committee, Council and Standing Committee Chairs will serve a two-year term.
“ION has a distinguished and passionate group of positioning, navigation and timing professionals in key positions to advance the goals of the organization.” said Lisa Beaty, executive director at ION.
The new members include:
ION Executive Committee
• President: Frank van Diggelen, Google
• Executive Vice President: Sherman Lo, Stanford University
• Treasurer: Frank van Graas, Ohio University
• Eastern Region Vice President: Jason Rife, Tufts University
• Western Region Vice President: Tim Murphy, The Boeing Company
• Satellite Division Chair: Patricia Doherty, Boston College
• Military Division Chair: John Langer, The Aerospace Corporation
• Immediate Past President: Y. Jade Morton, University of Colorado at Boulder
Council members
• Eastern Council Member-at-Large: Seebany Datta-Barua, Illinois Institute of Technology
• Eastern Council Member-at Large, Sanjeev Gunawardena, Air Force Institute of Technology
• Western Council Member-at-Large: Paul McBurney, OneNav
• Western Council Member-at-Large: Jihye Park, Oregon State University
Technical representatives
• Fabio Dovis, Politecnico Di Torino, Italy
• Christoph Gunther, German Aerospace Center, Germany
• Allison Kealy, RMIT University, Australia
• Nobuaki Kubo, Tokyo University of Marine Science & Technology, Japan
• Alexander Mitelman, AMM Technical Consulting
• Madeleine Naudeau, Air Force Research Laboratory
• Laura Norman, NovAtel, Canada
Standing Committee Chairs
• Awards Chair: Michael Meurer, German Aerospace Center, Germany
• Bylaws Committee: Deborah Lawrence, Federal Aviation Administration
• Ethics Chair: Heidi Kuusniemi, University of Vaasa & Finnish Geospatial Research Institute, Finland
• Fellow Selection Chair: Terry Moore, United Kingdom
• Finance Chair: Gary McGraw, Collins Aerospace
• Meetings Chair: Jeff Martin, Spirent Federal Systems
• Membership Chair: Okuary Osechas, German Aerospace Center, Germany
• Nominating Chair: Y. Jade Morton, University of Colorado at Boulder
• Publications Chair: Richard B. Langley, University of New Brunswick, Canada
• Technical Committee Chair: Sherman Lo, Stanford University
After more than five years of hard work by 131 authors from 18 countries, the new book set Position, Navigation, and Timing Technologies in the 21st Century (PNT21) is finally ready to meet readers.
Published by Wiley-IEEE Press, PNT21 offers a uniquely comprehensive coverage of the latest developments in the field of PNT by world-renowned experts. The two-volume set contains 64 chapters organized into six parts.
Position, Navigation, and Timing Technologies in the 21st Century Integrated Satellite Navigation, Sensor Systems, and Civil Applications
Y. Jade Morton, Frank van Diggelen, James J. Spilker Jr. and Bradford W. Parkinson, editors; Sherman Lo and Grace Gao, associate editors Publisher: Wiley-IEEE Press Hardcover Publication Date: January 2021 Vol. 1: ISBN: 978-1-119-45841-8, 1288 Pages Vol 2: ISBN: 978-1-119-45849-4, 912 Pages
Volume 1 focuses on satellite navigation systems, technologies, and applications. It starts with a historical perspective on GPS and other related PNT development.
Part A consists of 12 chapters on fundamentals of and latest developments in global and regional satellite navigation systems (GNSS and RNSS), the need for their coexistence and mutual benefits, signal quality monitoring, satellite orbit and time synchronization, and satellite- and ground-based augmentation systems that provide information to improve the accuracy of navigation solutions.
Part B contains 13 chapters on recent progress in satellite navigation receiver technologies such as vector processing, assisted and high sensitivity GNSS, precise point positioning (PPP) and real time kinematic (RTK) systems, direct position estimation techniques, and GNSS antennas and array signal processing. Also included are the challenges of multipath-rich urban environments, handling spoofing and interference, and ensuring PNT integrity.
Part C finishes the volume with eight chapters on satellite navigation for engineering and scientific applications. A review of global geodesy and reference frames sets the stage for discussions on the broad field of geodetic sciences, followed by a chapter on GNSS-based time and frequency distribution. One chapter each is dedicated to severe weather, ionospheric effects and hazardous event monitoring. Finally, comprehensive treatments of GNSS radio occultation and reflectometry are provided.
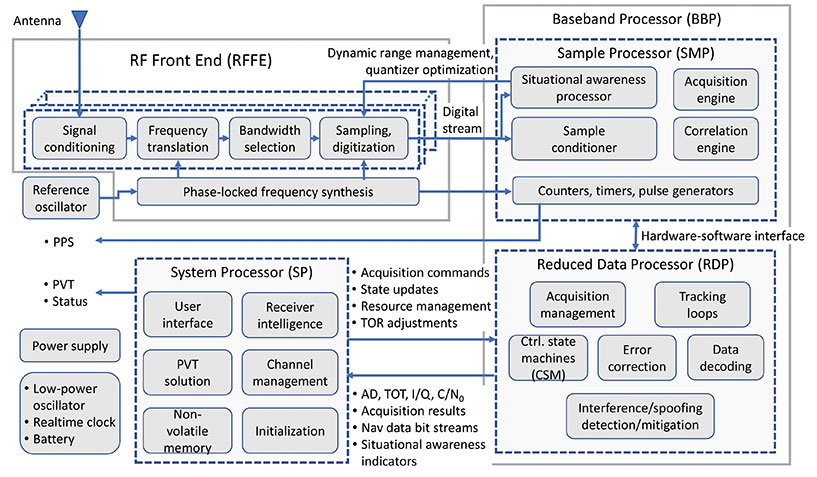
This simplified block diagram of a modern GNSS receiver — one of many illustrations in the book set — appears in Chapter 14, “Fundamentals and Overview of GNSS Receivers,” by Sanjeev Gunawardena and Y. Jade Morton. See excerpt below. (Image: Wiley-IEEE Press)
Volume 2 addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. An overview chapter provides the motivation and organization of the volume, followed by a chapter on nonlinear estimation methods which are often employed in navigation system modeling and sensor integration.
Part D provides seven chapters devoted to using various radio signals-of-opportunity transmitted from sources on the ground, from aircraft, or from low Earth orbit (LEO) satellites for PNT purposes.
In Part E, eight chapters cover a broad range of non-radio frequency sensors operating in passive and active modes to produce navigation solutions, including MEMS inertial sensors, advances in clock technologies, magnetometers, imaging, lidar, digital photogrammetry, and signals received from celestial bodies.
A tutorial-style chapter on GNSS/INS integration methods is included in Part E. Also included are chapters on the neuroscience of navigation and animal navigation.
Finally, Part F presents a collection of contemporary PNT applications such as surveying and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, satellite orbit determination and formation flying, and navigation in the unique Arctic environment.
Table of Contents
Volume 1: Satellite Navigation Systems, Technologies, and Applications
Part A: Satellite Navigation Systems
Part B: Satellite Navigation Technologies
Part C: Satellite Navigation for Engineering and Scientific Applications
Volume 2: Integrated Navigation Systems, Technologies, and Applications
Part D: Position, Navigation, and Timing Using Radio Signals-of-Opportunity
Part E: Position, Navigation, and Timing Using Non-Radio Signals-of-Opportunity
Part F: Position, Navigation, and Timing for Consumer and Commercial Applications
Collective Goal. Because of the diverse authorship and topics covered in PNT21, the chapters were written in a variety of styles. Some offer high-level reviews of progress in specific subject areas, while others are tutorials. A few chapters include links to MatLab or Python example code as well as test data for readers who desire hands-on practice.
The collective goal is to appeal to industry professionals, researchers and academics involved with the science, engineering and application of PNT technologies. The website pnt21book.com provides downloadable code examples, data, homework problems, select high-resolution figures, errata and a way for readers to provide feedback.
Jade Morton is a professor at the University of Colorado Boulder and director of the Colorado Center for Astrodynamics Research (CCAR).
Jade Morton is a professor at the University of Colorado Boulder and director of the Colorado Center for Astrodynamics Research (CCAR).
Excerpt from PNT21
14.1 Anatomy of a GNSS Receiver
Irrespective of the receiver type, the functionality of all GNSS receivers can be broken down into three major blocks: RFFE, baseband processor (BBP), and system processor (SP). In the literature, the term “baseband processor” may be used to refer to the combination of both the BBP and SP defined here. The general anatomy of a GNSS receiver is shown in Figure 14.3.
The RFFE converts the signals induced at one or more antennas into digitized sample streams. Depending on the application and market segment, data rates for these streams may be as low as 0.4 Mbytes/s (e.g. L1 band sampled at 3.5 MSPS and 1-bit sampling in an asset tracking device) to greater than 3 GB/s (e.g. L1 and L2 bands sampled at 60 MSPS and 16 bits across seven elements in an anti-jam military GPS receiver).
The BBP performs digital signal processing to acquire and track GNSS signals present in the digitized sample streams to produce raw GNSS observables for each visible satellite. These observables include time of transmission (TOT), accumulated Doppler Range (ADR), signal quality metrics such as carrier-to-noise density ratio (C/N0), in-phase and quadrature prompt correlator output (I/Q), and raw symbols of a GNSS signal’s broadcast navigation message (which are subsequently decoded). In addition, modern receivers typically perform varying degrees of situational awareness processing to monitor in-band interference such that a level of confidence can be assigned to these raw observables. Some advanced receivers have the ability to identify spoofing signals. Depending on the application, situational awareness outputs may be as rudimentary as the automatic gain control (AGC) voltage used to adjust front-end amplification or as sophisticated as spectrogram, histogram, and sample statistics for all streams evaluated at full sample precision.
The BBP also contains a counter that is driven by a digital clock signal that is phase-locked to the receiver’s reference oscillator. This counter is the basis for the receiver’s clock and is used to generate time-of-reception (TOR) epochs. Raw observables for all satellites in view that lead to range measurements are computed with respect to TOR epochs. Since the receiver clock is based on its reference oscillator, it drifts with respect to GNSS system times. Although possible, the frequency bias, drift, and drift rate of the reference oscillator are typically not adjusted to align with GNSS system time because dynamic adjustment of the oscillator can lead to instabilities. Instead, these parameters are estimated and used to drive a separate adjustable-rate counter that compensates for the reference oscillator errors. This forms the basis for GNSS disciplined oscillators.
It is possible to partition all baseband processing into two categories: sample processor (SMP) and reduced-data processor (RDP). The SMP performs high-rate but simple and algorithmically regular operations which largely comprise multiply-accumulate operations performed at the sample rate. The SMP may also contain configurable timers and pulse/event generators that determine sample processing intervals, as well as output precise timing pulses that are synchronized down to the nanosecond level with respect to GNSS system times (timing accuracy and precision are dependent on the application and market segment). The RDP performs low-rate but algorithmically complex operations. Some representative software functions running within the RDP are illustrated in Figure 14.3.
Bidirectional communications occur between the SMP and RDP at regular timed intervals corresponding to a kilohertz rate. This rate is easily handled by all modern microprocessors. Since these SMP/RDP transactions are time critical, the RDP runs either bare-metal code (i.e. no operating system) or a real-time operating system. The operations within the BBP are inherently parallel and largely independent of each other at the signal processing level. Some coupling occurs, for example‚ in code-carrier aiding, inter-frequency aiding (see Chapter 15), inter-satellite aiding (referred to as vector tracking, described in Chapter 16), and multi-element processing. However, this coupling is typically implemented at higher levels of abstraction. Modern multi-band and multi-constellation receivers are capable of tracking hundreds of GNSS signals simultaneously. To facilitate this highly complex command and control structure – which also needs to be dynamically scalable and adaptive depending on the number of satellites in view, environmental conditions‚ and operating modes – the control architecture is typically layered (i.e. hierarchical). Control at the individual signal acquisition and tracking layers is performed using simple configurable finite state machines (FSMs) whose state transitions are based on signal condition indicators such as code lock, phase lock, C/N0, and code-carrier divergence (CCD). These FSMs operate independently but are typically managed at a high level by the SP.
The SP takes the raw signal observables produced by the BBP and transforms them to the standard GNSS receiver measurements. These measurements include pseudorange (PR), accumulated Doppler range (ADR), carrier phase (CP), carrier Doppler, and C/N0. All modern GNSS receivers also compute position, velocity, and time (PVT) at configurable rates (1 to 100 Hz depending on the receiver type). The SP encodes these in one or more industry-standard data formats for distribution. These formats include Receiver Independent Exchange Format (RINEX), the National Marine Electronics Association (NMEA) format, the Radio Technical Commission for Maritime Services (RTCM) format, and vendor-specific proprietary binary formats.
The SP also performs all high-level functions that include receiver initialization, channel management, and user interface functions. Unlike the BBP, the operations within the SP are generally not time critical. In modern GNSS receivers, the SP is often an embedded computer running an advanced non-real-time operating system. It may also support modern data interfaces (wired USB and Ethernet, or wireless/cellular connectivity) and an advanced graphical user interface with touchscreen support. While too numerous to mention, representative software processes running within the SP are illustrated in Figure 14.3.
Although not shown in Figure 14.3, modern receivers (or the navigation system to which they are interfaced) may also support aiding from external sensors such as inertial measurement units (IMUs), magnetometers, inclinometers, barometers, wheel sensors, RADAR, lidar, infrared (IR), and electro-optical (EO) sensors. This external aiding to GNSS can occur at three levels: loose coupling (position level), tight coupling (measurement level), or ultra-tight coupling (sampled signal processing level). GNSS aiding using various non-GNSS sensors is described in Chapters 43–51 in Volume II, Part E.
As shown in Figure 14.3, a stand-alone GNSS receiver contains battery-powered low-power circuitry to keep track of absolute time while it is turned off. A real-time clock (RTC) driven by a low-power crystal oscillator accomplishes this task. In some cases, this crystal may be the same as the reference oscillator. Knowledge of absolute time, along with the last known location and previously decoded almanac/ephemeris data stored in the receiver’s non-volatile memory, allows it to estimate satellites in view and their Doppler offsets, thereby significantly reducing the TTFF: the time needed to acquire satellites and produce the initial PVT solution. In the case of modern military receivers such as M-Code, or subscription-based services such as the Galileo Public Regulated Service (PRS), the receiver must acquire the cryptographically generated spreading code that may never repeat. In this case, the initial time uncertainty has a significant impact on the acquisition search space and consequently the computational resources consumed by the acquisition engine as well as power consumption. The TTFF can be dramatically reduced when absolute time, the satellites in view, their Doppler frequencies, and ephemerides are sent to the receiver from a nearby reference station via a communications link. This describes the basis of Assisted GNSS (A-GNSS) technology, covered in Chapter 17 of this book.
In some respects, the reference oscillator can be considered the single most important component that affects GNSS receiver performance. Although the PVT solution estimates the deterministic components of the reference oscillator’s frequency error (i.e. short-term bias, drift, and drift rate), the stochastic component cannot be estimated and hence represents additional dynamics that must be tracked (i.e. in addition to satellite motion, user motion, satellite clock motion, and any ionospheric scintillation and multipath). The bandwidth of the carrier tracking loops must be increased to accommodate this close-in phase noise of the reference oscillator. This in turn increases the variance of the range measurements. The reference oscillator is also the only “moving part” in the receiver since it is based on the resonance of a quartz crystal or microelectromechanical systems (MEMS) structure. In addition to microphonics, which are small phase variations that may occur within the RFFE due to external forces (particularly if the RFFE comprises large discrete components), these forces couple through the resonating element leading to shock and vibration sensitivity [6]. Similarly, thermal expansion of the crystal as well as analog components in the RFFE due to changing ambient temperature, unless appropriately compensated or isolated, causes temperature sensitivity. The frequency synthesizer in the RFFE multiplies the oscillator phase noise and dynamics by the ratio of the synthesizer output frequency to the oscillator fundamental frequency, thus placing a significant short-term stability requirement on the reference oscillator. Oscillator short-term stability limits the coherent integration time, which is proportional to the processing gain. Hence, the quality of the reference oscillator directly impacts the recever’s attainable sensitivity (i.e. the minimum observable signal levels) as well as the rate at which it can output statistically independent measurements. Oscillator effects are covered in detail in Chapter 47.
The receiver intelligence process within the SP shown in Figure 14.3 performs functions such as determining what satellites are in view, how best to mitigate any in-band interference (as observed by the situational awareness indicators), dynamically adapting to varying operating conditions, determining the best set of range measurements to use for the PVT solution based on optimum satellite geometry and estimated range error metrics indicated by C/N0 (for signal blockage) and CCD fluctuations (for multipath and ionospheric effects), and many such highly complex decisions. Typically, these high-level functions occur at a lower rate such as 1 Hz or less. To a large degree, the level of sophistication and engineering embedded within the receiver intelligence block, as well as the other low-level control functions determines the receiver’s performance in the real world, as expressed by established figures of merit. These include measurement accuracy, update rate, TTFF, sensitivity, dynamics handling capability, multipath mitigation performance, interference detection and mitigation capability, receiver autonomous integrity monitoring, and fault detection and exclusion (see Chapter 23). In other words, for a given market segment and its associated SWaP-C constraints, the receiver’s hardware and available signal processing capabilities can only do so much. The rest, and quite often the attributes that distinguish it in the marketplace, lies within the hundreds of thousands of person-hours and centuries of combined experience baked into its sophisticated software/firmware.
The Institute of Navigation (ION) presented its Annual Awards during the ION International Technical Meeting and Precise Time and Time Interval Systems and Applications Meeting, both held virtually Jan. 25-28.
The ION Annual Awards Program recognizes individuals making significant contributions or demonstrating outstanding performance relating to the art and science of navigation.
Robert Odolinski received the Per Enge Early Achievement Award for development of multi-GNSS models for precise real-time kinematic positioning and for the sustained dedication to the research community, future surveyors and navigation professionals. The Per Enge Early Achievement Award is presented in recognition of outstanding contributions made early in one’s career.
Capt. Andrew P. Zimmerman received the Superior Achievement Award for validating critical navigation processes and collaborating with Air Force tacticians to provide the highest standards of navigation and protection for the Air Force’s premier electronic attack asset. The Superior Achievement Award is presented to recognize an individual who has demonstrated an outstanding performance as a practicing navigator of any vehicle, in any medium — marine, land, air, undersea and space.
Michael A. Lombardi received the Distinguished PTTI Service Award for system development and leadership in the successful delivery of the U.S. time and frequency standards signals to a variety of domestic and international PTTI users. The Distinguished PTTI Service Award is presented to recognize outstanding contributions related to the management of PTTI systems.
Jennifer E. Donaldson, Joel J. K. Parker, Michael C. Moreau, Dolan E. Highsmith and Philip D. Martzen received the Dr. Samuel M. Burka Award for their paper “Characterization of On-orbit GPS Transmit Antenna Patterns for Space Users.” Their paper was published in the Summer 2020 issue of Navigation, Journal of The Institute of Navigation, Vol 67, No. 2. The Dr. Samuel M. Burka Award recognizes outstanding achievement in the preparation of a paper advancing the art and science of positioning, navigation and timing.
Charles K. Toth received the Captain P. V. H. Weems Award for significant contributions to the development and implementation of multi-sensor integrated navigation systems and for demonstrated excellence as an academic mentor and professional leader. The Captain P. V. H. Weems Award is presented to individuals for continuing contributions to the art and science of navigation.
Karen L. Van Dyke received the Norman P. Hays Award for her significant contributions to civil GPS applications, for her lead role directing the Adjacent Band Compatibility study, and for her commitment to international PNT coordination. The Norman P. Hays Award is given in recognition of outstanding encouragement, inspiration and support contributing to the advancement of navigation.
Mingquan Lu received the Thomas L. Thurlow Award for significant and sustained contributions to the BDS-3 signals design and BDS-3/GNSS interoperable receivers development. The Thomas L. Thurlow Award recognizes outstanding contributions to the science of navigation.
Finally, Y. Jade Morton received the Distinguished Service Award for extraordinary service to The Institute of Navigation. The Distinguished Service Award recognizes extraordinary service to The Institute of Navigation.
Antenna development, going all the way back to the first antennas, has been one of continuous innovation,” Richard Langley wrote in our September issue. Even after more than 30 years of GNSS technology development, he pointed out, GNSS antenna development continues.
His statement is borne out by the responses submitted by manufacturers of GNSS antennas to four questions we posed to them:
What specific challenges are your antennas designed to address?
Over the past three years and the next three years, what have been/will be your key innovations?
How are advances in real-time kinematic (RTK) and precise point positioning (PPP) changing requirements for GNSS antennas?
What technical challenges or industry trends do you find most interesting or noteworthy?
The responses display a wide range of antenna designs for a wide range of applications. They show how manufacturers must constantly balance requirements for positioning accuracy, form factor, interference management and cost. For the GNSS user segment, antennas are the first link in the processing chain and the first line of defense against jamming, spoofing, multipath and, increasingly, adjacent band interference. Antenna designers are also challenged by the growing adoption and sophistication of RTK, PPP and similar technologies. All these variables, challenges and scenarios are reasons for the constant evolution of GNSS antennas.
Finally, it is not always obvious whether a device should be classified as a receiver or an antenna. For example, what Harxon calls a “smart antenna” others might call a receiver.
Specific challenges
NovAtel antennas enable exceptional tracking for multi-constellation precision and are packaged for practical use in the field. Our antennas are designed to be the first link in the processing chain to deliver centimeter-level precision in harsh operating environments and applications, including contested or crowded RF environments through our CRPA antennas.
Key innovations
Over the past three years, we have focused on multi-frequency support and simultaneous L-band reception (seen in the NovAtel GNSS-850) to provide exceptional positioning solutions and support future technology like RTK From the Sky. Optimized to work with OEM7 receivers, NovAtel antennas leverage patented multi-point feeding networks to providΩe symmetric radiation patterns across all frequencies for excellent multipath rejection and minimal phase-center variation and offset. In the next three years, we expect to further reduce the size of antennas needed in a resilient high-precision solution. At the same time, we are continuing to improve robustness to adjacent band interference. We work to optimize the full GNSS ecosystem, from the signal in space reaching the antenna, to the final position, velocity and time (PVT) solution exiting the receiver.
Anechoic chamber testing. (Photo: NovAtel)
Advances in RTK and PPP
Advances in corrections expose measurements from low-quality antennas. You need an antenna with sub-millimeter phase-center variation (PCV) accuracy and stability on par with the algorithms delivering centimeter-level solutions. When the processing chain eliminates errors down to the centimeter level (or less), you must avoid adding errors from unstable phase centers, for example.
Technical challenges and industry trends
A difficult challenge facing the antenna industry is the commercial demand to reduce the size and weight of antennas while maintaining functionality and performance. The industry will need to continue balancing between size and performance while producing innovative GNSS antenna solutions integrated with other technologies, for example with anti-jam capabilities.
Harxon
With Leo Wang, Product Technical Director
Specific challenges
The design of Harxon’s GNSS antennas aims to achieve a perfect balance between easy integration with RTK solutions and the ultimate product performance by meticulously dealing with wideband, positioning accuracy, form factor, and interference management.
Key innovations
Over the past three years, our signature antenna innovation is our 4-in-1 X-Survey HX-CSX100A multifunctional GNSS antenna, which integrates a GNSS antenna, 4G, Bluetooth and Wi-Fi in one compact enclosure. This multifunctional antenna simplifies receiver integration into an RTK solution and facilitates industry development. In the next three years, Harxon looks forward to more breakthroughs in positioning technology and delivering pragmatic innovations.
Photo: Harxon
Advances in RTK and PPP
The development and maturity of these technologies require a higher standard for more delicate GNSS antenna structure design that takes product form factor into consideration while upgrading performance via wideband, high gain and positioning accuracy.
Technical challenges and industry trends
The 5G era has arrived, and the application of 5G technology for the internet of things (IoT) is extensive. China has also proposed the integration of 5G technology and BeiDou. We believe that, in the next few decades, GNSS positioning and 5G technology will be widely applied in the IoT industry and create huge benefits.
Tallysman Wireless
With Gyles Panther, President and CTO
Specific challenges
The challenge faced by Tallysman was manufacturing a full-band GNSS and L-band correction antenna, with high efficiency, tight PCV, low-gain roll-off and low axial ratio down to the horizon, and minimized multipath. Plus, a narrowly filtered low noise amplifier (LNA) to mitigate interference, all in the smallest possible package.
Key innovations
Over the past three years, Tallysman has released the VeraChoke, helical and VeroStar lines. The VeraChoke serves the geodetic and survey reference station markets with PCV and full-band GNSS coverage.
Our helical GNSS and Iridium antennas are lightweight, compact and robust. They provide a precise phase center and radically reduced dependence on a ground plane because of their differential mode of operation. Their exceptional low weight makes them an excellent choice for copter-style UAVs.
Photo: Tallysman
The patented VeroStar element combines full coverage of the upper and lower GNSS bands, plus L-band corrections service, with reception of L-band downlink Mobile Satellite Service (MSS) signals and exceptional low elevation angle reception. It is rugged, compact and lightweight — ideal for land and marine rover applications. It also provides minimal and symmetric PCV with outstanding all-around performance.
Advances in RTK and PPP
Both correction systems require rover receivers to phase-lock on low-amplitude GNSS satellite signal carriers, and both are hugely dependent upon the GNSS antenna. The corrections are critical for precision agriculture and land survey applications. Our precision antennas are specifically designed to minimize phase-lock loop (PLL) cycle slips.
Technical challenges and industry trends
Interference, accidental or intentional, is a major challenge and threat to GNSS, particularly from encroaching L-band 5G cellular systems. Tallysman offers tightly filtered LNAs and single-band omnidirectional anti-jam antennas with a deep null at low elevations. We plan to introduce a new multiband omnidirectional antijam antenna in the second quarter of 2021.
Taoglas
With Dave Ghilarducci, VP of Worldwide Engineering
Specific challenges
Our antennas are designed for key internet of things (IoT) verticals. Our high-precision, multi-band GNSS antennas offer centimeter-level positioning and timing accuracy for applications where small size and high performance are required. We address the industry’s most compact form factors with out-of-band rejection for operation near transmitters.
Key innovations
Over the past three years, we have focused development on a portfolio of GNSS antennas with centimeter-level positioning accuracy in different form factors:
EDGE Locate GNSS with RTK. (Photo: Taoglas)
lighter, more robust antennas through our patent-pending Terrablast-based products (the GGBTP.35); which are impact resistant and 35% lighter than traditional ceramic patches
high-rejection internal patch modules for rejection for OEM integrations (AGGBP.SL and AGGBP.SLS series)
surface-mount active patch antennas with embedded active circuitry for easier integration (ASGGB Simplicity series)
off-the-shelf module with an integrated multi-band RTK antenna, electronics and receiver technology for ease of integration.
Over the next three years, we expect to expand our portfolio and support additional bands like E6, L6 and the L-band correction band. Plus, we are working with the European Space Agency to design IoT devices with integrated high-precision RTK and GNSS technologies.
Advances in RTK and PPP
Expansion of RTK, PPP and similar technologies into new domains has demanded better performance from mainline and OEM antennas. These correction technologies stress antenna gain and polarization purity to maximize signal strength. We address these issues in our integrated designs to mitigate multipath errors and maximize ease of integration.
Technical challenges and industry trends
The release of lower-cost multi-band receivers and modules could be the most significant shift the GNSS industry has seen in the last decade. This innovation is already expanding applications and challenging suppliers to provide better performance for size, weight and cost.
Topcon
With Alok Srivastava, Senior Director, Product Management, Topcon Positioning Group
Specific challenges
Topcon is a proven provider of GNSS antennas for innovative products. Our GNSS product portfolio offers antennas with excellent multipath mitigation, near-band interference rejection, and quality signal tracking from zenith to the horizon. We strive to provide affordable solutions for our geodetic, machine control and agricultural customers.
Key innovations
Topcon antenna technology is applied within standalone antennas along with integrated GNSS receivers. Antennas inside our integrated receivers, such as the HiPer HR, are distinctive in supporting Bluetooth and Wi-Fi in a common antenna stack without sacrificing GNSS tracking and positioning performance. These offerings also support compact designs of integrated receivers.
As the number of GNSS constellations expands and new communication methods become available, potential inference from neighboring signals grows with congestion of the RF spectrum. Our standalone antennas, PN-A5 and CR-G5 with cavity filter option, uniquely address these challenges.
In the coming years, antenna technology will need to stay strongly focused on interference rejection and mitigation, lower cost and smaller size. These demands challenge antenna providers to make technical advancements while investing in cost-sensitive manufacturing along with higher testing standards. In this regard, our new antenna test facility in Concordia sulla Secchia, Italy, will soon be offering robotic calibration services.
Advances in RTK and PPP
With increased demand and services available for PPP, Topcon antennas support both GNSS and L-band frequencies, such as in the HiPer VR/HR receivers, and standalone antennas (PG-F1, G5-A1, PN-A5 and CR-G5). As data communications continue to expand beyond L-band and RTK/network RTK, Topcon systems will support them without compromising positioning performance.
Technical challenges and industry trends
As GNSS antennas are one of the integral items within the GNSS system, the significance of delivering a cost-effective and miniaturized solution that provides robust positioning is critical to meeting needs in ever-growing precise positioning markets and applications. Topcon will continue to emphasize innovative antenna products through our research.
Trimble
With Stuart Riley, Vice President of GNSS Technology
Specific challenges
Each application has different requirements. For applications that require the highest position accuracy, the stability of the phase center, multipath mitigation, and the unit-to-unit production consistency are critical.
Some markets require high performance, and often in challenging environments such as high vibration experienced on construction equipment. Other customers require smaller, lower cost antennas and can tolerate a slight accuracy reduction.
The antenna is typically a combination of a passive antenna element with an active low-noise amplifier (LNA). The LNA needs to be carefully designed to remain linear in the presence of in-band jamming while rejecting out-of-band signals.
Key Innovations
For high-precision applications, Trimble first released the Zephyr series of antennas in the late 1990s. This antenna provides excellent phase center stability and unit-to-unit production repeatability; the antenna has exceptional multipath mitigation performance, which is enhanced in the geodetic version.
Since the Zephyr was first introduced, we have added support for additional GNSS systems and RF bands (L1/E1, L2, L5/E5 and L6/E6), transitioned to a RoHS-compliant manufacturing process, improved the LNA performance, developed rugged versions for construction vehicle mounting, and produced a smaller version used in the Trimble R10, R12 and SPS986 GNSS receivers.
More recently, we developed a lower cost high-performance antenna for the Trimble Catalyst software-defined GNSS receiver for Android phones and tablets. We also introduced an antenna in the Nav-900 guidance controller for agriculture that implements a meta-material design.
Looking forward, we will continue to innovate by providing antennas optimized to meet the needs of the markets, including cost, performance and morphology. Enhancements will include novel antenna architectures, production technique improvements, and careful material selection.
Advances in RTK and PPP
Applications for GNSS are expanding to include more non-technical users, and the markets are calling for small, light and low-cost antennas — especially for technologies like PPP and positioning products such as Catalyst. These requirements extend across all arenas, especially in applications served by RTX. The needs must be balanced against increased technical demands stemming from the expansion in GNSS bands supporting new frequencies and signals, including PPP correction data.
Technical challenges and industry trends
The challenges come in balancing seemingly conflicting needs for performance, size, weight and cost for the various applications.
Because Trimble focuses on specific user segments, we can provide antenna solutions that are the best fit for the various applications. For example, an antenna in a handheld device must be small and lightweight; however, on a construction machine, durability takes precedence over size and weight.
GNSS Winter School 2021 is planned for Feb. 22-26 in Islamabad, Pakistan. The Institute of Space Technology is hosting the event, in collaboration with the Space Education Research Lab of the National Center of GIS and Space Applications.
GNSS Winter School will be held on the institute’s campus; however, in case of severe circumstances (such as COVID-19), it will take place virtually online either partially or entirely.
GNSS Winter School will focus on GNSS positioning, coordinate and time reference systems, satellite orbit and position determination, signals, receivers, and specialized areas of inertial and integrated navigation systems.
A special session is planned on GNSS applications and opportunities in the current GNSS market.
The school is intended for engineers, researchers and students working in aeronautics and astronautics; guidance, navigation and controls; satellite or radio navigation; inertial and integrated navigation systems; space systems; constellation designs; interplanetary navigation; remote sensing; geoinformation science; and similar allied areas.