The late, great, oft-quoted Yogi Berra, in an interview shortly before his passing, was quoted as saying “I never said most of the things I said.” For our purposes, let’s concentrate on one of his most famous quotes: “When you come to a fork in the road, take it.”
On to GPS. I use the term GPS in a ubiquitous PNT (position, navigation and timing) sense for simplicity, because most people today use the term in a universal sense, similar to how we say “Google It” no matter which search engine we’re actually using.
Today, GPS is indeed at a crossroads, and there are multiple paths or avenues to follow — or Courses of Action (COA), as the government likes to say. Fortunately, most of you reading this fully realize GPS is so much more than just an atomic reference system in MEO, or Medium Earth Orbit. Let’s review the various GPS programs and see how they’re faring.
GPS III
Let’s be conventional and start with the hardware, the actual satellite bus (vehicle) being built by Lockheed Martin Space Systems in its Waterton facility in the beautiful foothills of the Rocky Mountains in Littleton just west of Denver, Colorado.
In an October 2015 speech before the International Astronautical Congress in Jerusalem, Israel, LMCO Chairman, President and CEO Marillyn Hewson stated the following in a marvelous speech entitled “There are No Borders in Space: International Cooperation Will Drive the New Space Age:”
“We must focus on three priorities for the future of space. The first is space as an instrument to create global industrial partnership. Second is space as a driver of economic growth. And third is space as an opportunity to inspire the next generation of innovators.”
Chairman Hewson concentrated on the future of space, as are we, and probably due to her venue, she naturally chose to focus on international cooperation. She went on to say this about GPS specifically:
“GPS III, the next-generation of the U.S. Air Force’s Global Positioning System, will share a new, common civil signal with other international navigation satellites like Galileo and GLONASS. That means people around the world will have more accurate and reliable positioning data and connectivity from a truly global positioning constellation.”
Speaking about space capabilities and opportunities in general, she said:
“Space-based technologies are ubiquitous today. Want to find an address? Find out the weather forecast? Talk to someone on the other side of the world? The fact is, space is already an enabler of economic growth. And with today’s innovations combined with the power of international partnerships, it has the potential to drive magnitudes more.
“Today, the space sector represents about 1 percent of global economic activity. Yet, I could argue that without space, the other 99 percent wouldn’t be nearly as effective or efficient. Partners are developing commercial satellites that connect people around the world, enable distance learning and fuel job growth in many sectors of the global economy.”
You really can’t fault any of Chairman Hewson’s statements about space and GPS in particular. Indeed, it is an excellent presentation as it embodies the essence of motherhood and apple pie for space-faring nations.
However, she has glossed over one of the most pressing problems, not only for GPS III, but for all potential U.S. space-based assets still to be launched: access to space. How are we going to actually lift the satellites into orbit? Where are the launch vehicles?
United Launch Alliance
ULA launch. (Courtesy of United Launch Alliance)
Many of you may have seen the latest GPS III launch services announcement by United Launch Alliance (ULA), a consortium of Boeing and LMCO launch companies taking advantage of the synergies each company brings to the launch arena. Officially, ULA is described as a 50-50 joint venture between Lockheed Martin and The Boeing Company, formed in 2006 to provide reliable, cost-efficient access to space for U.S. government missions.
Just a few weeks ago, ULA — the consortium that has launched all GPS satellites since 2006 with more than 90 consecutive government launches without a single failure, a world record — made what many consider to be a startling, albeit carefully worded, announcement regarding the latest and what many consider to be unduly restrictive government GPS III RFP (Request For Proposal) for launch services.
“ULA wants nothing more than to compete, but unfortunately we are unable to submit a compliant bid for GPS III-X launch services. The RFP requires ULA to certify that funds from other government contracts will not benefit the GPS III launch mission. ULA does not have the accounting systems in place to make that certification, and therefore cannot submit a compliant proposal.
“In addition, the RFP’s Lowest Price Technically Acceptable (LPTA) structure allows for no ability to differentiate between competitors on the basis of critical factors such as reliability, schedule certainty, technical capability and past performance.
“Further, under the restrictions imposed by the 2015 National Defense Authorization Act (NDAA), ULA does not currently have any Atlas engines available to bid and therefore is unable to submit a timely proposal.
“ULA remains fully committed to supporting America’s national security missions with world-class launch services. We look forward to working with the Air Force to address the obstacles to ULA’s participation in future launch competitions to enable a full and fair competition.”
A separate ULA press release states ULA will continue with development of its Vulcan launch vehicle, which they bill as a next-generation launch system. So it appears that it is merely the restrictions and caveats that pose a problem for ULA and GPS III launches, not technology or timelines.
“With the introduction of the Vulcan, ULA’s next-generation launch system (NGLS), ULA is transforming the future of space launch — making it more affordable, accessible and commercialized — and innovating to develop solutions to the nation’s most critical need: reliable access to space,” ULA said.
The Falcon .9 (Courtesy of SpaceX)
SpaceX
With ULA out of the picture, at least temporarily, for GPS III launches, this leaves the door open for Elon Musk, recently of Big Bang Theory fame, and his Space Exploration Technologies Corporation better known as SpaceX to step in and fill the void presumably with a variation of their heavy lift Falcon 9 rocket.
SpaceX promotes itself as the largest private producer of rocket engines worldwide, and no doubt that is true. SpaceX has demonstrated the capability for both successful launches and spectacular failures. That is almost to be expected for a new rocket engine and a new company, which only came about in 2002. However, where human lives are concerned, failure is not an acceptable option.
SpaceX is very much aware that a launch failure resulting in lives lost might well spell the end of SpaceX. With that as a given, SpaceX recently delivered its 100th Merlin 1D engine, nine of which form the basis for the first stage of the Falcon 9 launch vehicle. Indeed, SpaceX touts unparalleled redundancy — with nine Merlin 1D engines on the first stage, it could actually overcome a failure of any one of the Merlin engines and still have a successful launch.
Merlin ID engines all in a row. (Courtesy of SpaceX)
Only time will tell, however, and this scenario leaves the U.S. government with very few options as long as the current guidelines regarding the Russian RD-180 core are in place. Other companies such as Moog, Orbital Sciences, Aerojet Rocketdyne, Blue Origins and ATK, to name a few potential contenders, could separately or as a team bid on the next-generation launch vehicle for GPS III.
However, that would mean storing the GPS III satellites and payloads for inordinately long periods of time, which is both expensive and risky. Expensive in dollars, since each GPS III space vehicle (SV) would cost approximately $1 million per year — not an official figure, but a best guess from several sources, to store, and expensive and risky from an operational point of view in that the federal government and LMCO would have no idea if the GPS III SVs and payloads really worked as advertised.
They would have no idea if there were any major flaws or anomalies, and once the production line at LMCO space systems was shut down, it would be prohibitively expensive to restart, if that were even possible. Remember, three GPS III SVs are being constructed currently, and today there are only eight confirmed orders for GPS III SVs.
As for major anomalies, just think back to the GPS IIF launches where the first four each revealed a major and separate anomaly for IIF SVs that had to be corrected on all future SVs and payloads before further launches occurred.
My sources at LMCO in Littleton assure me the first GPS III SV with a complete payload, built by Harris nee Exelis, nee ITT, will be ready for delivery to the government in mid-2016, possibly earlier. With a 90-day checkout the first GPS III SV could be ready for launch as early as late fall 2016.
The problem at that point becomes — and actually is a problem right here and now — there is no evidence that the government currently has a viable certified program to launch, control or maintain the GPS III satellites and payloads. But that is another story with many twists and turns.
The Road Less Taken
Apparently, there are numerous options for the government where GPS programs are concerned, and for a change many of those options, while being considered outside the box, actually appear to be the smarter choice.
As that great American poet Robert Frost once famously wrote:
“I shall be telling this with a sigh
Somewhere ages and ages hence:
Two roads diverged in a wood, and I—
I took the one less traveled by,
And that has made all the difference.”
Until next time, Happy Holidays, Happy New Year and Happy Navigating on that road less traveled by.
Q: What do you think of the FAA requirement that all UAV purchasers register their devices?
Lydia Bock President and CEO Geodetics Inc.A: We need a pragmatic and sensible response to the integration of UAVs into the civil airspace, balancing safety of civil aviation and the economic benefits associated with the emerging markets and applications of UAV technologies.
Clearly maintaining flight safety in the national airspace is critical. A balanced approach would include registration of UAVs, education for hobbyists and FAA flight certifications for commercial operations.
New technologies for automated sense-and-avoid should be investigated, and their certification for use should be streamlined.
John Studenny Director System Engineering Esterline – CMC Navigation SystemsA: Registration of all radio-controlled (RC) aircraft or UAVs upon purchase may be too broad or harsh, and may conflict with current freedoms already enjoyed by hobbyists.
However, as capabilities (altitude, speed, flight duration, payload capacity) increase beyond what today’s RC aircraft or UAVs can deliver, regulations and registration may be required.
It comes down to UAV capability and how the UAVs are used. That needs to be the focus of any regulation or enforcement.
As the holiday season approaches, many of us think about ways we can help others, or promote the social good. This month, our Market Watch section features three different projects designed to do just that.
In our Mapping section, we explore how geospatial information systems can be used to help us help the homeless. Geographic information systems (GIS), community involvement and app builders are helping gather and use data to deliver critical services to the homeless in major metropolitan areas in the United States.
In our UAV section, we discover that unmanned aerial vehicles can be used for more than commercial purposes. One company used its fixed-wing UAV to help the Peruvian government save Machu Picchu, an Incan citadel, from the 15th century and a UNESCO World Heritage Site.
In another project, UAVs are being used in an effort to stop the poaching of rare and endangered African wildlife. Silent, stealthy UAV patrols can spot the poaching activity by providing eyes in the sky, even at night using infrared cameras.
These are just three examples of ways we are using location and positioning technology — ways that probably didn’t even come close to the top ideas when the tech was conceived.
As we look toward 2016, it’s exciting to think what new applicatins might be in store. If you have an application story to share, please email me at [email protected]. Perhaps your story will appear in a future issue.
We have grown accustomed to seeing market projections for some GNSS, notably Galileo. European GNSS Agency economists have done a remarkable job analyzing and predicting the global market over the past five years. Business intelligence firms in the U.S. periodically report on the power of GPS driving, or participating in, significant portions of the U.S. economy. Figures from Russia are scant but do occasionally emerge, even if they are difficult to integrate into a meaningful global picture.
Now the Global Navigation Satellite System and Location-based Services Association of China (GLAC) has issued a report asserting some lofty, often staggering, and occasionally surprising statistics and projections.
China’s satnav system is helping generate $31.3 billion for the country this year. That benefit is expected to double in five years.
70 percent of China’s population uses smartphones. That’s 980 million people who may be sending location requests at any given time. This constitutes the biggest growth sector found by the GLAC.
China’s installed base of navigation devices in private vehicles lags behind the United States, at less than 500,000, or 5 percent of cars, but 20 percent of 1 million commercial vehicles in China use products that access BeiDou technology.
“Sky’s the Limit for BeiDou’s Clients,” crowed China Daily. Meanwhile, halfway round the world in Prague, the Czech Republic, Jing Li of the China Transport Telecommunication & Information Center, reported to a conference of the International Association of Institutes of Navigation that a BeiDou global service will be provided by 2020. The National Differential BeiDou Ground-Based Augmentation System will have 175 reference stations, with more than 1,000 network stations and a space-based augmentation system to boot. So far, the system has hit every benchmark.
Some market projection figures strike one as wildly optimistic, while others have proved true. Some GNSS appear to grow or modernize in fits and starts. But BeiDou appears steadily ascendant.
In this screen capture of the what3words app, the pointer is on mouse’s head at the Magic Kingdom. That grid cell is named “perform.heckle.comfortable” and will not change.
Early this year, I wrote a short column about what3words, one of the exhibitors at the Esri Federal GIS Conference. Since then, I’ve run into a fair number of geospatial professionals who hadn’t heard about what3words. This month, I’m doing a deeper dive on it because I believe it will become part of our daily lives in just a few short years.
What is what3words?
what3words is a global location system using tessellated grid squares of the entire Earth. Each grid cell is roughly 3 meters by 3 meters, and each cell is uniquely named using a simple three-word combination such as “fork.lamp.book.” On initial consideration, one would think, “So what?” — until you understand the ramifications.
First, this has already been done. More than 57 trillion 3-meter squares have been named using only 40,000 words.
Second, the system is non-hierarchal, and the cells have no adjacent relationship, so minor errors are dramatically obvious.
Third, unlike GPS lat/long, the United States National Grid (USNG), the Military Grid Reference System (MGRS) or even street addresses, the three-word combinations are easy to remember and not easily misunderstood.
Fourth, the system is not just a 57-trillion record database; it’s a compact app (10 mb) that accurately generates the same unique name for each unique location with identifiers that are locked in concrete.
The what3words website has more information and a well-done video overview.
How did it come to be?
Surprisingly, what3words was developed not by a geospatial analyst, but by a musician who got tired of driving around trying to find the correct hotel loading dock or concert venue entrance using an address or verbal directions. Even GPS coordinates didn’t help, since it was easy to miskey numbers or misunderstand voice-relayed numbers. As a result, he and his team built an app that is easy to use, memorable and not error prone.
Early radio analogy
The system is so easy to understand that non-technical users can quickly adopt it. I believe that it will greatly speed communications, minimize mistakes, and reduce wasted time and mileage. To me, a good analogy is the World War I development of the phonetic alphabet.
In the early days of radio, voice communications were difficult and error-prone because of static, noise and garbled transmissions. To prevent mistakes, the military adopted a fixed list of words to help with aural identification of individual letters. The words were used for transmission of critical information such as map coordinates or to spell out words. (Alpha, Bravo, Charlie, Delta, etc.) A similar mind/ear relationship occurs with what3words. Here is a well-written technical appraisal and amplification by Prof. Robert Barr.
Possible uses
Military
The implications for the military could be significant. When I served on a destroyer, one of my duties was Gunnery Liaison Officer, providing naval gunfire support for troops in battle locations. The 5-inch gunfire was called in by concealed spotters in the battle space. The coordination and conversion between the spotter location, the spotter’s point of view, and our offshore position and line of fire required significant calculations and diligence, because friendly fire was always a concern. Current developments in GPS and laser technology have helped significantly, but friendly fire mistakes from guns, missiles and bombing are still a constant concern. The use of what3words could be a simple and quick way to double check and prevent targeting friendly locations.
Another issue that was a problem for some military bases was addressing, or E911. Some bases had buildings identified by numbers corresponding to the sequence of construction rather than street addresses, so building 245 might be next to building 1842 and next to building 38 (I’m not sure if this is still an issue). With what3words, help could be directed to exact building entrances or to exact locations in remote parts of a base.
Disaster response would also benefit. In many disasters such as tornados or hurricanes, street signs and building were obliterated. What3words would provide “addressing” for relief supply drops and other needs.
The location of the helo deck on the battleship Wisconsin in Norfolk, Virginia, is identified as “chew.sketch.hardly”.
First Responders
Whether it be an air crash needing remote mountain rescue, a farm accident in a rural area, a capsized boat at sea, or a heart-attack victim in a shopping mall or home, response could be significantly faster with less chance for error. Even in urban areas, there are frequent stories of delayed medical aid because E911 street databases were not correct or updated with new construction. what3words provides complete location coverage and would serve as an easy and effective double check for street addresses.
Government and NGO activity
Some of you may be familiar with U.S. Census Bureau TIGER files and LUCA (Local Update of Census Addresses). I still can’t wrap my head around why census workers have to keep posted house numbers and street names confidential. Perhaps using what3words could provide a simpler, unclassified way to direct census workers. Additionally, many actions that currently use GPS may be better served with 3m grid locations, such as agricultural or environmental data collection.
Business
Mundane activities such as materials delivery to unaddressed construction sites or package delivery to homes and businesses will be more efficient. (Rumor has it that a prominent package delivery service is testing what3words.) Utility companies could locate cut-off valves, meters and other assets within 7 feet of their actual location. Meeting friends, getting an Uber pick up, or even having a pizza delivered to a specific bleacher location at a Little League game would become easy.
Second and third world
There are complex issues regarding the World Bank and economic development. To qualify for major economic development loans, countries have to demonstrate that they have viable property ownership and taxation system in place so loans can ultimately be repaid. We take our tax parcel system for granted, but may third-world countries don’t even have consistent and comprehensive street names and addresses. what3words can provide “addresses,” which could lead to more comprehensive parcel identification.
On an even more basic level, the majority of citizens in the world don’t have an address for simple deliveries. When I was in a rural part of Haiti, just getting some simple wood screws was an all-day trip and ordeal. I learned to really appreciate being able to take a quick run to Home Depot or get two-day deliveries at my front door from Amazon. Those “luxuries” don’t exist in many parts of the world, and their lack really cripples those trying to start or run a business. what3words gives everyone an “address.”
Try it
Don’t take my word for it; try it yourself. Download the app on your smartphone (I’m using an iPhone, so others may be slightly different). Launching the app will display a map with your location and its what3words name. Click the “eye” to view an ortho image rather than a vector map.
If the padlock is locked, unlock it and you can move the map to different locations showing different what3words names. If you are sent a what3words location, you can click on the magnifying glass and type in the three words. The app will prompt “Near Me” or “Anywhere.” If there is no match near you, it will show possible options that come close by looking at alternate spellings or words. If you click “Anywhere” it will search the entire world for a match.
Once it takes you to the location, you can use Maps or Google Maps to get directions.
Other points
what3words has been adopted by many geospatial firms, including Esri. Available online or offline, anywhere in the world, the what3words locator can be available to the GIS team or customers across the entire ArcGIS platform. Since what3words is grid-cell layer, it may be possible to do map algebra operations on the cells in Spatial Analyst. I’m not sure there would be a benefit to that other than not needing to transform the list of affected cells.
what3words is available in several languages. The words are not simple translations, but developed for each language. Although the what3words team carefully scrubbed the words used to avoid offensive terms, I hope what3words doesn’t have to deal with lawsuits from individuals unhappy with the three-word identifiers of their location.
Conclusion
I predict that within a few years, our business cards will also include a what3words address. Simply put, I believe that what3words may prove to be one of the most significant geospatial advancements since Jack Dangermond spatially linked points, lines and polygons to a relational database.
what3words is going to save time, money and, most important, it’s going to save lives.
P.S. If you read my March column reviewing Peter Zeihan’s book The Accidental Superpower, you may remember the importance Peter placed on 3D printing affecting the geo-politics of shipping manufactured goods from China. If you haven’t seen the new CLIP technology 3D printers, you need to view this TED video to see how far the technology has progressed.
Part 1 of this series appeared in the June Survey Scene newsletter, Part 2 appeared in the August newsletter, and Part 3 appeared in the October newsletter. Upcoming Survey Scene newsletters will carry additional columns in this series.
Basic Procedures and Tools for Ensuring GNNS-Derived Ellipsoid Heights Meet the Project’s Desired Accuracy
David B. Zilkoski
In Part 1 of this series, I discussed the basic concepts of GNSS-derived heights; the article discussed the three types of heights involved in determining GNSS-derived orthometric heights: ellipsoid, geoid, and orthometric.
Part 2 discussed guidelines for detecting, reducing, and/or eliminating error sources in ellipsoid heights. It focused on guidelines for establishing accurate ellipsoid heights in a local geodetic network. It discussed procedures that need to be followed to detect, reduce, and/or eliminate error sources to estimate accurate GNSS-derived ellipsoid heights, and procedures for evaluating published NAD 83 (2011) ellipsoid heights.
Part 3 in this series described the differences between a scientific gravimetric geoid model and a hybrid geoid model, and why it is important to use both geoid models in your analysis. It highlighted that the latest published United States National Geodetic Survey (NGS) hybrid geoid model, Geoid12B, is made consistent with the United States national vertical height reference frame, that is the North American Vertical Datum of 1988 (NAVD 88). It emphasized that this means a user will be consistent with NAVD 88 when using GEOID12B to estimate GNSS-derived orthometric heights, but it doesn’t guarantee that your GNSS-derived orthometric heights are accurate. It demonstrated how to use these geoid models and ellipsoid heights to identify potential issues with published NAVD 88 heights.
This column (the fourth in this series) will focus on basic procedures and tools that should be used to establish accurate GNSS-derived ellipsoid heights for a project. It will provide basic procedures for ensuring a project’s GNSS-derived ellipsoid heights are meeting the desired accuracy. The accuracy of the adjusted ellipsoid heights must be evaluated first, so if there is an issue with the difference between the GNSS-derived orthometric height and published NAVD 88 height, the user will know if the ellipsoid height or the orthometric height is the problem.
NGS has developed guidelines that address the establishment and densification of vertical control networks through the use of GNSS surveys and valid NAVD 88 orthometric control. NGS has documented these procedures in NOAA Technical Memorandum NOS NGS-59, titled “Guidelines for Establishing GNSS-derived Orthometric Heights (Standards: 2 cm and 5 cm). The document provides basic rules and procedures that need to be adhered to for computing accurate NAVD 88 GNSS-derived orthometric heights. However, before we can validate NAVD 88 height constraints used to estimate GNSS-derived orthometric heights, we first need to ensure that the GNSS-derived ellipsoid heights are accurate to the desired requirements. It is impossible to describe all situations in a short newsletter, so this column will address the basic procedures with a few caveats.
Validating Your GNSS Survey Project’s Ellipsoid Heights
Part 2 discussed guidelines for detecting, reducing and eliminating error sources in ellipsoid heights (NGS 58). It focused on evaluating published NAD 83 (2011) ellipsoid heights. This column will discuss a few basic procedures for analyzing a GNSS project’s data to ensure the desired ellipsoid height accuracy standard has been met.
GNSS data can be evaluated by analyzing repeat baseline differences, network loop closures and residuals from a minimum-constraint least-squares adjustment. It was noted in the second article that if GNSS users follow the NGS guidelines, they will reduce and/or eliminate errors in ellipsoid heights and, at a minimum, they will detect problems or errors in data. It was also mentioned that the basic concepts are very simple, but they all need to be followed exactly as prescribed. For example, “the observing scheme for all stations requires that all adjacent stations (baselines) be observed at least twice on two different days and at two different times of the day.”
GNSS can provide “absolute” and relative positioning information much easier, faster and more precisely than some classical techniques. However, the wrong station can still be occupied, the height of the antenna can be measured wrong or incorrectly entered during the baseline reduction processing phase, the receiver can malfunction, an abnormal atmospheric condition can cause large errors in the height component, or some “unknown Gremlin” can be causing an error source.
Classical techniques of establishing horizontal and vertical control used networks that consisted of many loops, triangles and braced quadrilaterals. This design provided enough redundant observations to detect data outliers. NGS guidelines for establishing GNSS-derived heights were designed with this same concept in mind. Since all baselines must be repeated and adjacent station observed, analyzing repeat baseline differences, loop closures and residuals from minimum-constraint least-squares adjustments are very effective analysis tools for detecting data outliers.
Comparing Ellipsoid Height Differences from Repeat Baselines
This procedure is very simple: subtract one ellipsoid height difference from another, for instance, the ellipsoid height difference from baseline A to B on day 1 minus the ellipsoid height difference from baseline A to B on day 2. If this difference is greater than 2 cm, one of the baselines must be observed again. Comparing ellipsoid height differences from repeat baselines is a very simple procedure, but it’s also one of the most important. Many users complain about having to repeat baselines, but requiring an extra occupation session in the field can often save many days of analysis in the office. In addition, repeating the baseline provides the redundancy necessary to obtain the desired relative accuracy of the survey (that is, repeat measurements help to derive a more accurate result than a result derived from a single measurement).
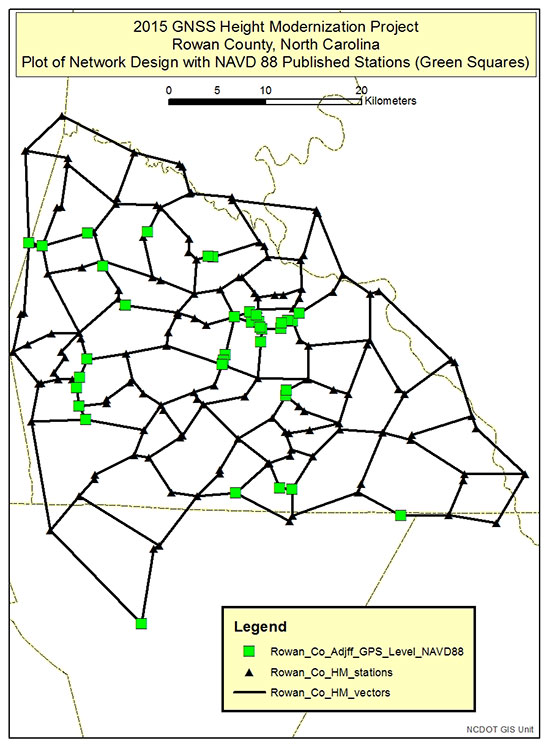
Figure 1 depicts the network design of a 2015 North Carolina Geodetic Survey (NCGS) GNSS Height Modernization Project. The data from this GNSS project was provided to me by the North Carolina Geodetic Survey (James G. Gay, chief of Western Field Operations, North Carolina Geodetic Survey, Division of Emergency Management/Risk Management, North Carolina Department of Public Safety, 2090 US 70 Highway, Swannanoa, NC 28778). It should be noted that these results should be considered preliminary and have not been finalized by NCGS personnel. This is an excellent example of a GNSS project that followed the guidelines outlined in NGS 58. The network design includes short baselines with many loops. The average length of baselines is 2.9 km, the maximum baseline is 13.5 km, and there are 465 baselines connected to 182 stations. All baselines were repeated, making the analysis easy.
Figure 1. Plot depicting the Network Design of the NCGS Rowan County Height Modernization GNSS Project.
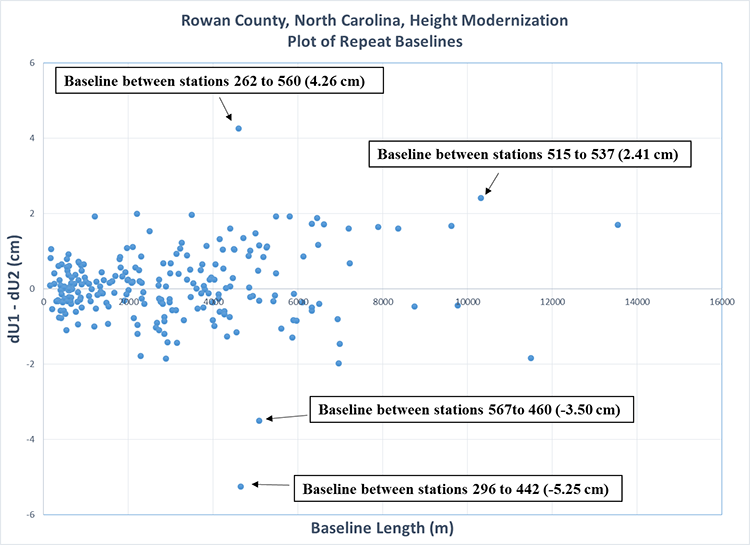
Figure 2 is a plot of the differences between repeat baselines. First, it should be noted that most baselines are less than 5 km and most repeat baselines differences are less than +/- 2 cm. There are some outliers, which is not unusual when performing GNSS surveys even when following all guidelines outlined in NGS 58. What is important is that these outliers are identified, and then additional observations are performed to meet the guidelines and obtain the desired accuracy of the survey.
The repeat baseline procedure helps to identify these outliers such as the baselines highlighted in figure 2. As noted in figure 2, the largest outliers are on two different baselines. These baselines should be re-observed to meet the NGS 58 guidelines. The requirement is to repeat the baseline on different days and at different time of the day. The reason for the requirement is to get two observations under different conditions and different satellite geometry. The user needs to determine which baseline is the outlier so he can ensure that he has two baselines with different satellite geometry. When a network is properly designed with short baselines and many loops, the results from a minimum-constraint least-squares adjustment can help identify the outlier.
Figure 2. Plot of repeat baselines for the NCGS Rowan County Height Modernization GNSS Project (does not include re-observations of repeat baselines that did not meet the 2 cm guideline).
Analyzing Loop Closures
Loop closures can be used to detect “bad” observations. If two loops with a common baseline have large closures, this may be an indication that the common baseline is an outlier. The following statement appeared in Part 2: “Please be aware that repeatability and loop closures do not always disclose all problems, and that is why it is important to adhere to the procedures outlined in NGS’ publications.” So why is it okay to use loop closures now?
Since users must repeat baselines on different days and at different times of the day, there are several different loops that can be generated from the individual baselines. If a repeat baseline difference is greater than 2 cm, then comparing the loop closures involved with the baseline may help determine which baseline is the outlier. As previously stated, according to NGS 58 guidelines, if a repeat baseline difference exceeds 2 cm, one of the baselines must be observed again, and baselines must be observed at least twice on two different days and at two different times of the day. If it can be determined which baseline is the potential outlier, the user will know which time of the day to re-observe the baseline. Therefore, loop closures can be very helpful in isolating errors when the user followed all of the guidelines outlined in the NGS 58 document.
Plotting Ellipsoid Height Residuals from Least Squares Adjustments
It is important that during the analysis of the GNSS-derived ellipsoid heights, the user performs a minimum-constraint least-squares adjustment and identifies potential outliers. This ensures that the GNSS-derived ellipsoid heights meet the user’s desired standards. This is not a complex procedure if the user knows how to perform a least-squares adjustment of GNSS data. Explaining least-squares adjustments is beyond the scope of this column. Today, most GNSS manufacturers provide support software that includes performing least-squares adjustments. NGS also provides software tools for validating data formats and performing adjustments. These tool can be found here. I used these tools to analyze and adjust the survey data of the Rowan County GNSS Height Modernization Project.
If users follow NGS guidelines and evaluate all repeat baselines, the adjustment results should confirm what has already been determined. For example, if a repeat baseline indicates a large difference between two vectors, then typically one of the residuals of one baseline should be larger than the other. Following NGS guidelines usually provides enough redundancy for the adjustment process to detect outliers and usually apply the residual to the appropriate observation, that is, the bad vector.
Like comparing repeat baselines, analyzing ellipsoid height residuals is also important. During this procedure, the user performs a 3D minimum-constraint least-squares adjustment of the GNSS survey project (constrain one latitude, one longitude and one ellipsoid height), plots the ellipsoid height residuals, and investigates all residuals greater than 2 cm.
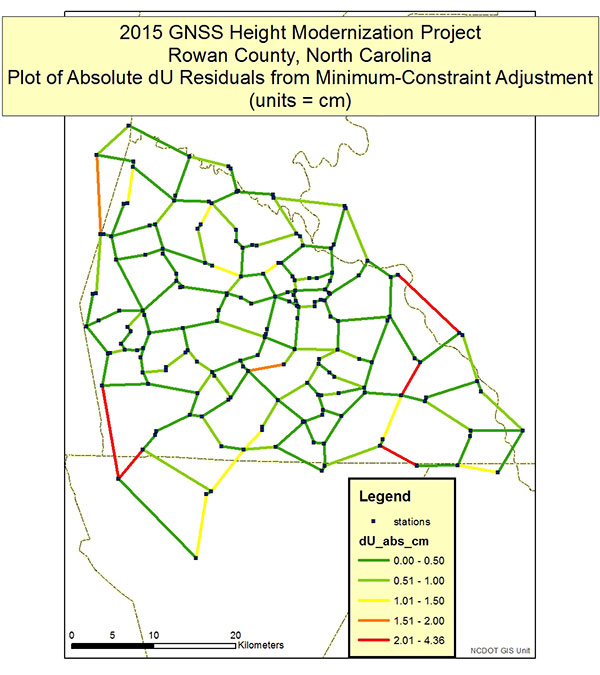
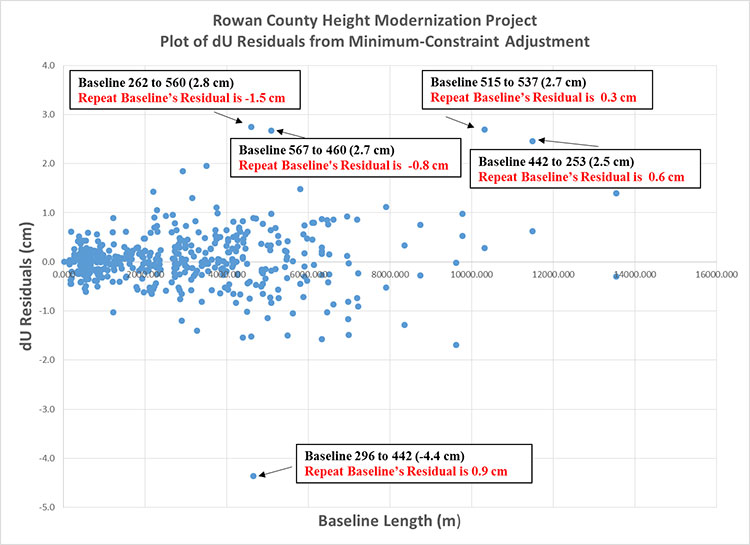
Figures 3 and 4 depict the dU residuals from a least-squares adjustment of the Rowan County Height Modernization Project. NGS’ adjustment program provides the vector residuals in dX, dY and dZ; and dN, dE and dU (local geodetic horizon coordinate system). dU residuals are not the same as dh residuals, but for all practical purposes can be analyzed just like dh residuals. Looking at Figures 3 and 4, a few items should be noted. First, all dU residuals are less than 2 cm except for five baselines. Four of the five baselines had repeat baselines that exceeded the 2 cm repeat baseline requirement (see Figure 2). For example, the plot of repeat baseline differences indicated that baseline between station 296 and 442 disagreed by 5.25 cm (see Figure 2). The plot of dU residuals (Figure 4) from the least-squares adjustment shows that one of the baseline’s residual is -4.4 cm and the other is 0.9 cm. The adjustment results are indicating which baseline needs to be re-observed to meet the guideline’s requirement of repeat baselines on two different days at two different times of the day. That’s all there is to it, when the user follows NGS guidelines exactly as prescribed.
Figure 3. Plot depicting absolute dU residuals from the NCGS GNSS Height Modernization Project (does not include re-observations of repeat baselines that did not meet the 2 cm guideline).Figure 4. Plot of all residuals from the NCGS Rowan County GNSS Height Modernization Project (does not include re-observations of repeat baselines that did not meet the 2 cm guideline).
The reader may have noticed that one large residual on the residual plot, baseline 442 to 253 (11.5 km), did not show up as a large different on the repeat baseline plot. There are several reasons why this could occur. For example, the stations involved in the baseline are not adjacent stations, so the baseline wasn’t repeated; the repeat baseline closure was large, but not greater than 2 cm; or the pair of stations are involved with many vectors and the one vector is inconsistent with the other vectors. Regardless of the reason, if there’s enough redundant observations to and from a station and the repeat baselines don’t indicate a problem, then the adjustment is doing what it’s designed to do; that is, detecting outliers and reducing their influence on the final adjusted height. In this particular case, the repeat baseline closure between stations 442 and 253 was 1.84 cm, which meets the NGS 58 guideline of 2 cm. The adjustment uses all of the data to determine the best set of coordinates. Based on the repeat baselines and loops surrounding the two stations, the adjustment indicated that one of the vectors fits better with the other vectors surrounding the two stations. Per the requirement of NGS 58 guidelines, the NCGS re-observed all five baselines with large residuals.
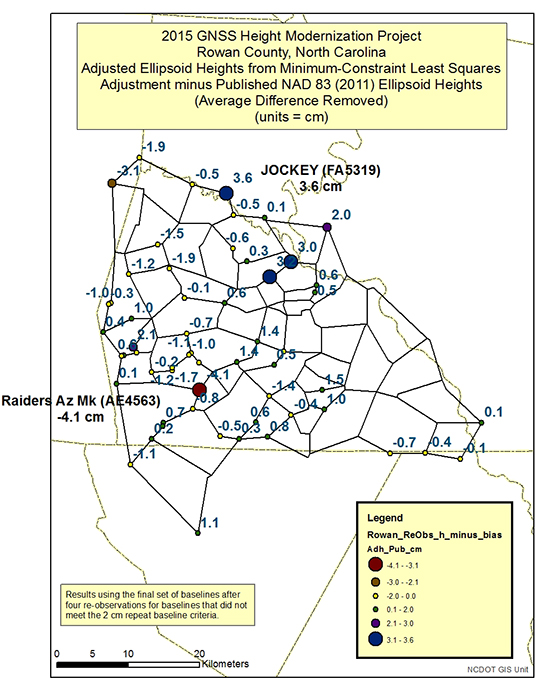
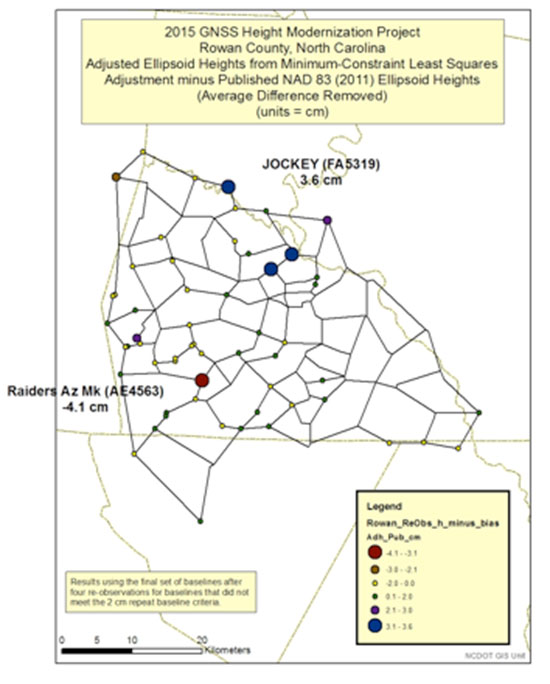
After all outliers are detected and removed from the adjustment, the user should compare the adjusted ellipsoid heights with the latest published ellipsoid heights, that is, NGS published NAD 83 (2011) ellipsoid heights. Figures 5 and 6 are plots of the adjusted ellipsoid heights from a minimum-constraint least-squares adjustment minus the NAD 83 (2011) ellipsoid heights. Since this was a minimum-constraint adjustment (that is, only one latitude, one longitude and one ellipsoid height value were constrained), a bias shift based on the average differences was removed from all differences. Most of the differences agree within +/- 2 cm. There are several that are greater than +/- 2 cm, but only one is greater than +/- 4 cm.
As mentioned in Part 2, many of the older GPS survey projects that were part of the NAD 83 (2011) network adjustment were not Height Modernization projects and were not performed following the NGS 58 guidelines. That is, most baselines are greater than 10 km and were not repeated. Therefore, in my opinion, many of the published ellipsoid heights local-height accuracies may be optimistic. The user should consider this when determining whether their results are more accurate than the published values. NGS’ Constrained Adjustment Guidelines for incorporating GNSS project data into NAD 83 (2011) state, “As a general rule, if the adjusted values of the constrained coordinates of a station shift by more than 2 cm horizontally and/or 4 cm in height, its horizontal coordinates and/or ellipsoid height, respectively, should be unconstrained.”
The stations that have height differences greater than 4 cm should be investigated. In addition, stations that have large relative height differences (greater than 4 cm) between closely spaced neighbors should also be investigated. For example, station Jockey’s difference is 3.6 cm, and two of its neighbors’ differences are only -0.5 cm. The relative difference exceeds 4 cm [3.6 cm – (-0.5 cm)] between two closely spaced stations.
Figure 5. Plot of adjusted ellipsoid height minus published NAD 83 (2011) Ellipsoid Heights (the number is the difference for that particular station; units = cm).Figure 6. Plot of adjusted ellipsoid height minus published NAD 83 (2011) published heights.
It is important to understand the quality of the adjusted ellipsoid heights. When analyzing the project’s ellipsoid heights, the user should compute the local ellipsoid height accuracy values. Part 2 discussed NAD 83 (2011) network and local accuracies. NGS’ adjustment program has an option of computing network and local accuracy values.
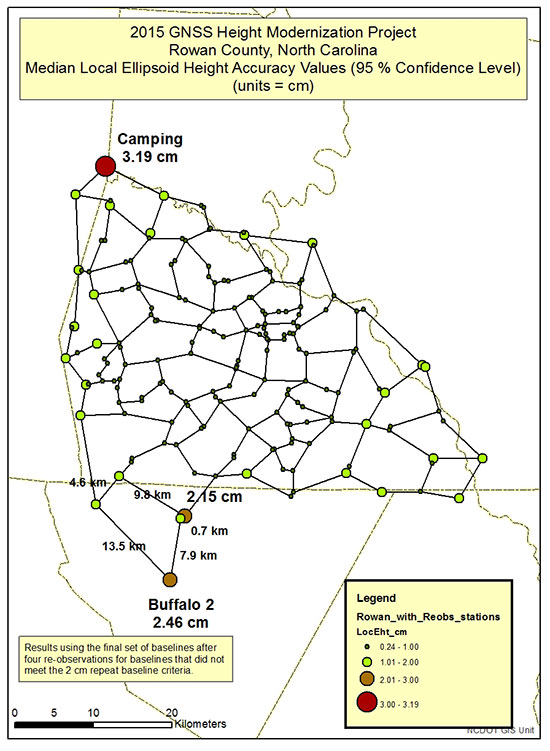
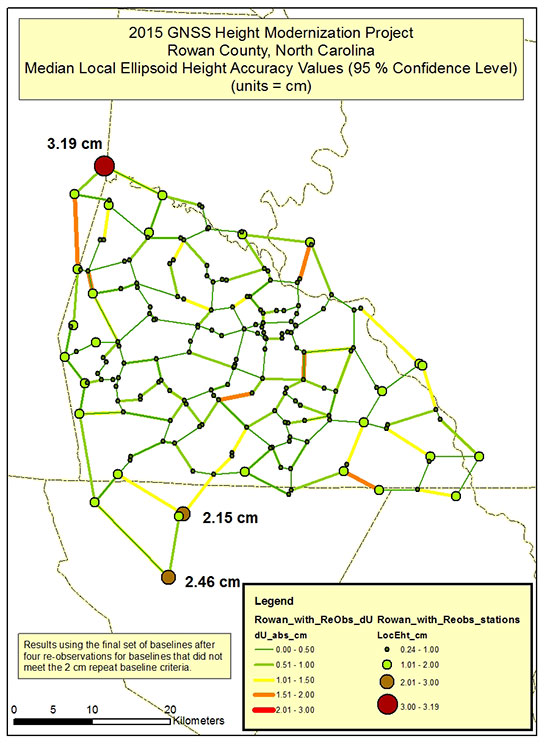
Figures 7 and 8 are plots of NCGS Rowan County GNSS Height Modernization median local ellipsoid height accuracy values. Stations that have local ellipsoid height accuracy values greater than 2 cm should be investigated. Figure 7 highlights the two largest median local ellipsoid height values [Camping (3.19 cm) and Buffalo 2 (2.46 cm)]. The observations and residuals of the baselines in the area should be closely analyzed.
Figure 8 is a plot of the local ellipsoid height accuracy value with the absolute dU residual values. If the user follows all of the NGS 58 guidelines, then all baseline residuals should be small (less than 2 cm). In this project, the largest “dU” residual is 1.86 cm. Saying that, the network design could be modified to try to improve a station’s median local ellipsoid height accuracy value.
For example, station Buffalo 2 has a median local ellipsoid height accuracy value of 2.46 cm (see Figure 7). It’s only involved in one loop, and it’s relatively large. The loop has five baselines consisting of lengths of 13.5 km, 9.8 km, 7.9 km, 4.6 km and 0.7 km. Two of the baselines lengths are greater than the guideline’s average baseline recommendation of 7 km, but all repeat baselines meet the 2 cm guidelines, and all residuals are “reasonable.” Adding another baseline between two different stations to create two smaller loops from the one larger loop would decrease the size of the loop and increase the redundancy in the network.
In this particular case, station Buffalo 2 has a published NAD 83 (2011) ellipsoid height, and the difference between the adjusted height and the published height is only 1.1 cm (Figure 5), indicating the new survey is consistent with the old survey. Station Camping also has a published NAD 83 (2011) ellipsoid height, and the difference between the adjusted ellipsoid height and published height is -1.9 cm (Figure 5). Once again, this indicates that the Rowan County GNSS survey is consistent with the previous survey.
This column focused on describing procedures for analyzing a project’s GNSS-derived ellipsoid heights. As previously stated, it important to ensure that your GNSS-derived ellipsoid heights meet the desired accuracy of the project before using the survey data to estimate GNSS-derived orthometric heights.
Figure 7. Plot of NCGS Rowan County Height Modernization project’s median local ellipsoid height accuracy values.Figure 8. Plot of NCGS Rowan County Height Modernization project’s median local ellipsoid height accuracy values and absolute dU residuals.
So far, this series has addressed the following topics:
basic concepts of GNSS-derived heights
NGS’ guidelines for establishing GNSS-derived ellipsoid heights (NGS 58)
differences between hybrid and scientific geoid models, and
procedures and tools for detecting GNSS-derived ellipsoid height data outliers.
These four columns were meant to provide the reader with basic concepts and procedures for estimating GNSS-derived ellipsoid heights.
My next column, which will appear in the February 2016 Survey Scene newsletter, will discuss procedures for estimating GNSS-derived orthometric heights. Determining valid NAVD 88 published heights is very important when using GNSS data and geoid models to estimate GNSS-derived orthometric heights. NGS has documented these procedures in NOAA Technical Memorandum NOS NGS-59. The NGS 59 guidelines are separated into three basic rules, four control requirements and five procedures that need to be adhered to for computing accurate NAVD 88 GNSS-derived orthometric heights. The next column will address the NGS 59 guidelines.
PORTLAND, Ore. — Two weeks ago, I attended (and hosted) the Field Technology Conference here in Portland, Oregon. This is the fifth year of the conference. In years past, it’s had a forestry emphasis primary because the Western Forestry and Conservation Association has been a major partner in organizing it.
This year, the Pacific States Marine Fisheries Commission and Pacific Northwest Aquatic Monitoring Partnership joined the organizing committee. The result was a 50-percent increase in attendance and a more diverse audience.
Another newcomer to the conference was a Civil GPS Service Interface Committee (CGSIC) U.S. State and Local Government Subcommittee meeting, which was co-located with the Field Technology Conference, offering a direct connection between civil GPS users and U.S. government representatives who are involved in GPS.
The conference was a two-day event comprised of three technology tracks: a track for general field technology and two tracks for industry-specific (forestry and fisheries) subjects, hands-on technology demonstrations and a field trip. Although forestry and fisheries professionals were the featured user groups, nearly all of the subject matters — GPS, UAVs, smartphones, tablets, laser rangefinders, lidar, photogrammetry, and field data-collection software — is applicable for a wide range of natural resource users involved with GIS (geographic information systems) technology.
As one of the hosts of the conference, I started out moderating the general session with all of the attendees in one room. This year, my general session topics include geospatial awareness and growth, GPS/GNSS technology, mobile devices (smartphones and tablets) and UAVs.
Something new I tried this year, which worked out really well, was using audience response “clickers.” These small handheld devices were given to each audience member and allowed them to answer multiple choice questions that I posed in my Powerpoint presentation. I’ve always been a fan of audience input, and started polling the audience during webinars I conducted many years ago. For this conference, I used an audience polling system from Turning Technologies. I’d like to share with you the questions I asked the audience and the responses that I received.
Question #1: Are you here?
Comment: This was a test question to see if the audience response system was working properly. I’m still not sure if the audience just had a great sense of humor or a technical problem. I think the former was true. ☺
Question #2: Have you attended this conference before?
Comment: This was great news that the conference is attracting new attendees. It’s an annual event held in November, so keep your eyes on it for next year!
Question #3: After a brief discussion about the availability of higher accuracy geospatial data (eg. GNSS, UAVs, etc.), I was curious about the level of accuracy the audience required in their typical tasks.
What geospatial data accuracy do your typical tasks require?
Comment: I wasn’t sure what to expect with this question, but since I’ve polled a fisheries audience before, I had a feeling accuracy requirements would vary, and they did. Previously, a fisheries audience had told me that they were satisfied with 5-meter accuracy.
Question #4: The last question leads to this one. I wondered if the audience accuracy requirement was driven by requirement or by availability.
Are you satisfied with the accuracy of the geospatial data you use?
Comment: The answer is clear that, generally speaking, the audience would use higher accuracy geospatial data if it was available.
Question #5: The next question was a pure technology one. In the day of BYOD (Bring Your Own Device), I’ve been very interested in monitoring the trends in mobile devices. The question about operating systems is relevant because it determines which data collection software you can use. For example, if a specific data-collection software is written only for Windows, it will not run on an Android or Apple (iOS) device.
Which operating system do you use on your mobile device(s)?
Comment: These responses surprised me a bit. They certainly don’t match the global market share figures that I’ve read. Following are the latest mobile device operating system market share numbers reported by IDC and Statista.
Question #6: The next part of my presentation discussed unmanned aerial vehicle (UAV, also known as UAS or drone) technology. UAVs were a significant part of the conference this year. We had many presentations and some static demonstrations on UAV technology. On this subject, I had several questions for the audience.
Do you currently use a UAS?
Comment: These answers were not surprising. Flying UAVs commercially in the U.S. requires a special permission from the Federal Aviation Administration (FAA). To date, the FAA has only issued about 2,000 such exemptions.
Question #7: Do you anticipate using a UAS?
Comment: These answers surprised me a bit. I had no idea the audience would be so interested in personally flying a UAV. This has me thinking about this the same way I think about GPS receivers — just another tool in the toolbox.
Question #8: How much are you willing to spend on a UAS?
Comment: These responses don’t surprise me, although I polled another audience at a different venue that was more engineering-oriented, and the answers were a bit different. The engineering-oriented audience was willing to spend more for a UAV.
Furthermore, in speaking with various attendees during the conference, there was quite a bit of interest in attaching different sensors to UAVs for various requirements. For example, lidar, multi-spectral and thermal (temperature) sensors were commonly mentioned as payloads they would like to see. The challenge is that the cost of a UAV rises sharply when these types of payloads are accommodated, and conflicts with the audience’s response about how much they are willing to pay for a UAV.
In next month’s column, I’ll post links to the papers presented at the Field Technology Conference as well as videos of papers presented by the CGSIC folks.
See you next month.
Follow me on Twitter at https://twitter.com/GPSGIS_Eric
The European Space Agency (ESA) has unexpectedly announced a new leadership team. The naming of eight senior leaders to the heads of various departments brings back one figure very well-versed in Galileo matters to head the Galileo program and navigation-related activities: Paul Verhoef. Verhoef was the European Commission coordinator for Galileo activities from 2005 to 2011.
In a rare weekend session of the ESA Council, termed “an extraordinary meeting” held “in restricted session” in the agency’s own official release, the agency announced new managers for several key agency positions, two each in the areas of space applications, science exploration, space and technology operations and administration. The reorganization apparently comes at the behest of ESA’s new director-general, Johann-Dietrich Woerner, who assumed his post in July 2015.
The new leadership team is expected to start work in early 2016.
The structure groups together separate directorates into themes, while not reducing the overall number of directors at the 22-nation agency. In ESA’s area of Space Applications, Paul Verhoef is named as Director of Galileo Programme and Navigation-Related Activities (D/NAV). It is not known currently where Didier Faivre, heretofore ESA’s Director of Galileo and navigation-related activities (since 2011), is headed.
Verhoef has a master’s degree in electrical engineering from the Technical University of Eindhoven, the Netherlands. After working in the commercial sector as an engineer, lastly at Eutelsat in the ground segment procurement section for EUTELSAT-II satellites, he has held various posts at the European Commission, with a 1.5-year interlude as a vice president at ICANN, a not-for-profit public-benefit corporation dedicated to keeping the Internet secure, stable and interoperable.
From 2005 to 2011 he was the EC’s Programme Manager for EU satellite navigation programmes. During the very turbulent and ultimately abortive public-private partnership (PPP) negotiation period for Galileo, he kept a level head and all communication avenues open between industry and government.
Since that time he has served as the EC’s Head of Unit – Research and Innovative Transport Systems, DG MOVE, where he set up a new research and innovation unit in the transport field, and as Head of Unit – Renewable Energy Sources, DG RTD, in charge of research and innovation programming and policy development in the renewable energy technology and market take-up area.
Verhoef will be working or at least corresponding to some extent with Jeremie Godet, the EC’s head of sector, Galileo Implementation. Godet is also new in his position, since August 2015. Previously, he held various Galileo-related posts in the EC, and had a two-year stint with the European GNSS Agency (GSA) as head of the Security Department. The December issue of GPS World will carry an article on Galileo’s future co-authored by Godet.
Verhoef last appeared in the pages of the magazine in November 2010, giving a lengthy interview addressing aspects of interoperability with GPS and prospects for further development in that area, the need for an ongoing political commitment by the EU to Galileo, the challenges of financing, the prospects for an 18-satellite constellation (which he dismissed at the time as unrealistic), military considerations for both Galileo and GPS, and uncertainty around Galileo’s Public Regulated Service. See Galileo, View from the Top.
The changes at ESA constitute the latest episode of an ongoing, and perhaps as-yet unresolved discussion (which can be a polite term for “power struggle”) regarding what role ESA, the EC and the European GNSS Agency (GSA) each have in the direction of the space-navigation program. The current shuffler, Johann-Dietrich Wörner, was previously chairman of the Executive Board of Germany’s space agency (DLR), and at least once when in that position publicly expressed his impatience with such long-running deliberations.
Janice Partyka at the LA Auto Show with a car representing the GENIVI Alliance, a non-profit automotive industry alliance committed to driving the broad adoption of an in-vehicle Infotainment open-source development platform. (Photo: courtesy of Janice Partyka)
LOS ANGELES — The Los Angeles Auto Show’s Connected Car Expo, held Nov. 18-19, puts LA at the intersection of Detroit and Silicon Valley. Cybersecurity garnered attention, as did the impact of the sharing economy on connected features. Caution was urged that these new technologies be carefully vetted for safety and reliability, as failures will impede market acceptance. And research shows safety to be one of consumers’ highest valued attributes that connected vehicles can offer.
Call to action on automotive cybersecurity. Safeguarding the vehicle with its hugely complex supply chain is an enormous challenge. Sensors can be spoofed, wireless sensors and radar can be forged, and cameras can be blocked, warned Andre Wiemerskirch of the University of Michigan Transportation Research Institute. A greater following distance between cars would allow other systems to kick in, should some sensors be hacked. Wiemerskirch appealed for a delay on all connected vehicle features that make a vehicle too vulnerable to hacking until there are better cyber security solutions. He proposed confidence levels for determining the integrity of information coming back from sensors. And he called for a resilient architecture to be created with mature security solutions, such as those used in iPhone security.
A dependable car hacker? Faith in vehicle reliability is one thing; faith that the vehicle won’t be hacked is another. I was looking forward to Chris Valasek’s appearance once again at the Connected Vehicle Show. He is a skilled automotive hacker, who has helped the industry become more secure. You may have read the account by Andy Greenberg in Wired magazine of how Valesek and a cohort hacked Greenberg’s Jeep (with permission) while he was traveling on a freeway. This included disabling its brakes, accelerator and other core functionality. Valasek didn’t show up for his scheduled talk, which, perhaps, can’t be seen as unexpected.
How well do they perform? Connected vehicles struggle with performance in certain environments, warned Thomas Form of Volkswagen. More testing and work are needed for automated cars to handle bad weather, particularly conditions in which visibility is obscured, like fog or sandstorms. Unusual objects, such as tumbleweed skittering across the highway, can cause an automated vehicle to make an emergency stop. What would happen when a traffic light is red, but a police officer points to a driver to go, or indicates she needs to stop at a green light? Form exhorted attendees to test all scenarios, even the unlikely ones.
Will driver skills erode? One attendee asked panelists if with automation, drivers’ skills will become rusty from disuse and be less able to handle manual driving, pointing to the airplane disasters of Asiana in San Francisco and Aeroflot in China. Both flights crashed due to pilots’ confusion with autopilot. The U.S. Federal Aviation Administration (FAA) claims two thirds of pilots make mistakes because of their reliance on technology. A common error is not recognizing that the autopilot has been disconnected. A report from the FAA reads, “pilots sometimes rely too much on automated systems and may be reluctant to intervene.”
Industry worried about sharing. The exponential growth in the sharing economy and declining interest among young people in owning a vehicle was one theme of the conference. If this becomes a massive disruptive trend in mobility, do we know its influence on the uptake of connective technology? The young are most ready to embrace new technology, yet teenage driver license rates peaked in 1982 and have fallen ever since.
New mobility options. Millennials, those born after 1980, are showing less enthusiasm for car ownership and driving than their predecessors. Less than 70 percent of those aged 16-24 have a driver’s license. John Zimmer of Lyft reported that 60 percent of their rides in San Francisco and 50 percent of those in New York City are with Lyft Line, a service in which strangers heading in the same direction share Lyft rides. Not only are riders accepting an unknown person to drive them in a personal car, they don’t mind sitting shoulder-to-shoulder with strangers in the intimate confines of a vehicle. Zimmer reported that Lyft is now looking to offer themed cars, such as those showing sports or other types of entertainment on video screens to create new market “verticals.”
Transforming a personal car into rental vehicle. Cars are vastly under-utilized with the average U.S. household using its cars just four percent of the time with only 1.7 seats occupied on average. This has been duly noted by some car owners, who have created an economy of renting out their vehicles with the help of services like RelayRides. Automakers are taking stock of how Airbnb sliced into the hotel market and are looking at ways to own shared mobility. Ford is one of the OEMs experimenting in the sharing market. Alicia Agius of Ford described Go!Drive, which offers access to a fleet of cars for flexible and affordable one-way journeys throughout London. It also serves to introduce drivers to the Ford brand and build a loyal base among those who become car buyers.
How are we doing? The intersection of tech and automotive is going remarkably well, and the OEMs are proud of how they have cut long development cycles and become more open to new ways of thinking. Tech has prided itself as the innovators, but a speaker from Google humbly remarked, “The automotive industry has been thinking about the future longer than those of us living in Silicon Valley and working at Google.” A nice tip of the hat.
Uber has made big moves implementing location technology by signing a deal with TomTom, buying Microsoft’s mapping technology, and outright purchasing deCarta this year. The company is working with Carnegie Mellon University in Pittsburg to develop autonomous vehicle technology. In other location news, distinct technology is cropping up in the indoor location market to make widespread implementation possible.
Kevin Dennehy
Uber is becoming a big player in the location industry with its announcement this month that it will use TomTom’s maps and traffic data for its ride-hailing service. The deal’s financial terms were not disclosed.
While Uber unsuccessfully made a $3 billion bid for Nokia’s mapping business, it also acquired Microsoft’s mapping technology and the key personnel that came with it. The San Francisco-based company, currently operating in 300 cities worldwide, also acquired veteran location industry deCarta earlier this year.
The mapping data will be key in Uber’s strategy to be a major force in autonomous vehicle development. To research driverless cars, Uber has leased a 53,000-square-foot facility in Pittsburgh.
The question is, what market segment will be first for major autonomous vehicle rollout? At least one executive believes such technology companies as Uber have the advantage. “Because the continued success of [Uber’s] business depends on it, and they have the money to spend on it to gain a competitive advantage,” explained Scott Frank, Airbiquity vice president of marketing. “If ride share companies can reduce the variability and expense of physical drivers, they can reduce the cost of their services — even while improving their margins, and compete more effectively for market share versus private ride services, like taxis/limousines and public transportation, which is more limiting in terms of availability and comfort.”
Frank says his company sees the market differently than others when it comes to autonomous vehicle development and rollout. “Google has been clear since the beginning about their automotive end goal, which takes a very long-range view — produce fully autonomous vehicles connected to public infrastructure with everything connected by Android and enabled by Google computing, data management, service delivery and advertising capability,” he said.
Apple and Tesla’s ambitions are more in close and short-term, in that they want to produce electric vehicles that are better than what the traditional automakers are able to churn out, Frank said.
“Uber is a recent entry into the fray, so it’s a bit premature to put them in the ‘build a vehicle platform’ class, although it’s becoming evident that they are very interested in developing underlying technologies that autonomous cars will certainly rely on,” he said. “In the last couple of months we’ve seen public statements from large traditional automakers referencing their autonomous vehicle ambitions, so they are definitely going to step up and not simply concede the autonomous opportunity to Google — or any another automotive industry newcomers.”
Frank believes there are distinct areas in the United States where autonomous vehicle rollouts make sense. “[Companies are looking at] transportation pain points that autonomous will solve like urban traffic and lack of easy and affordable parking, public transportation infrastructure that can more easily accommodate the necessary changes to integrate and support autonomous, and metro sizes that aren’t so large that it would impossible and/or too costly to get anything done,” he said. “So cities like Portland, Minneapolis, Austin, Raleigh and [such areas as] Silicon Valley come to mind, to name just a few.”
Either way, autonomous vehicles will present huge societal and business changes and such questions as will the public trust the new technology and get them where they need to go, safely and reliably, Frank said. “As with all new technologies there will be an adoption curve at play here with early adaptors taking the lead ahead of the mainstream,” he said. “We saw the same thing with horseless carriages, by the way. People placed more trust in their horses before they began to understand and allow themselves to realize the benefits of motorized transportation.”
In other autonomous vehicle news, Ford said last week it was ramping up its driverless car efforts by being the first automaker to test its self-driving cars at Mcity, a 32-acre prototype town with private roads in Ann Arbor, Mich.
Indoor Location Market Finds Low-Cost Technology
Recent advancements in chip-based indoor location position technology are allowing developers to find a low-cost way to get the capability into multiple devices, said Bruce Krulwich, Grizzly Analytics founder.
“The most exciting aspect of recent advances in chip-based indoor location positioning technologies is that indoor positioning is being added to the next generations of chipsets already being used in today’s smartphones,” said Krulwich, who recently released a new study, Chip-Based Indoor Location Technologies, which profiles GPS, Wi-Fi and sensor processing chips. “This means that the chips that device makers already include in their designs will soon include indoor location capabilities.”
The biggest advantage of chip-based approaches is that they can integrate data from GPS, Wi-Fi and MEMS motion sensors at a very low level, using data direct from the chips, without requiring work by the CPU to enable more efficient and continuous location positioning, Krulwich said.
“While there are many approaches being taken by the chip makers, the one that I’m most excited about is the combination of motion sensing with GPS. In this approach, the same chips that process GPS signals also use data from MEMS sensors, such as accelerometers, gyroscopes and magnetometers, to track locations when GPS signals are unavailable,” he said. “Motion-sensing approaches don’t work forever, since errors in the sensors accumulate over time, but should be able to give reasonable location estimates for 10-15 minutes after a person walks inside. This should be long enough to be a very valuable source of location positioning in between GPS or Wi-Fi signals.
Krulwich said this positioning approach can work anywhere, without Wi-Fi hotspots, BLE beacons or even maps of the site. “This is the closest to ubiquitous location positioning that I’ve seen,” he said.
Krulwich believes the new chip technology will allow the first large-scale incorporation of location technologies into electronic devices, appliances, wearables, Internet of Things (IoT) and others. “A cool example is a camera that tracks an athlete’s location automatically as they run around the basketball court.”
In other location news:
A new agenda is out for Driverless, which will be March 22-23, 2016, at the Crowne Plaza Hotel, San Francisco Airport. The autonomous vehicle conference will feature more than 30 speakers and 15 exhibitors. Go to www.driverlessmarket.com for more information.
Note: In May 2013 this newsletter published a column on “What’s New in GNSS Simulation.” This month, Editor Tony Murfin takes a brief look at a new start-up in GNSS simulation, Skydel, and its software signal simulator. We also provide quick updates on the latest from those simulation companies and others.
Skydel Software-defined simulator Skydel provides a software-defined simulator using generic hardware to accommodate system integrators who may have a consumer product or application with GNSS inside, and may not require a full-function simulator. Skydel uses a regular GPU to perform modulate the GNSS signal. The computer can be a laptop or desktop, but must include an Nvidia graphics card. The Universal Software Radio Peripheral (USRP) here is the Ettus N210. Skydel also uses the bladeRF x40 made by nuand, an alternative USB 3.0 Software Defined Radio, and Averna RP-6100 Record & Playback system.
“What’s New in GNSS Simulation” Updates
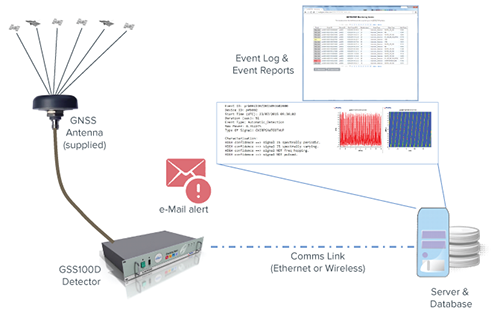
Spirent Spirent debuts practical PNT framework for more robust position, navigation and timing systems Threats to GNSS and related PNT applications are more orchestrated and coordinated, with the motivation to disrupt or cause financial loss. The technology to disrupt GPS has also become much more accessible, resulting in GPS vulnerability even gaining attention at hacker conventions. Spirent’s GNSS Interference Detector System helps users solve these problems.
Rohde & Schwarz Solutions for all aspects of LBS testing Need to verify your location based service (LBS) applications based on A-GNSS, OTDOA and eCID? Rohde & Schwarz offers a wide range of testing solutions for all aspects of LBS testing, including protocol conformance, minimum performance and OTA. Applicable from development and production to installation, the solutions support the positioning techniques and protocols deployed by mobile network operators.
CAST CAST lightweight GPS Satellite Simulator With its compact size of 7 x 11 x 3 inches and weighing in at just over four pounds, the SGX is CAST’s smallest fully capable simulator to date. The SGX lightweight portability features 16 channels of L1 C/A and P codes and is extremely accurate and repeatable. Features include a touchscreen, individual satellite power control and start-and-stop scenarios with the touch of a button.
Spectracom GNSS Simulator Compatible with IRNSS and QZSS Spectracom’s GPS/GNSS simulator is now available for testing receiver compatibility with India’s global navigation satellite system, IRNSS, and Japan’s regional satellite system, QZSS. The Spectracom GSG-6 Series multi-frequency GNSS signal simulator is designed to be field upgradeable to readily enable the addition of all current and future GNSS constellations.
iFEN SX3 GNSS Software Receiver The SX3 Black Edition is a modular dual-RF multi-GNSS software receiver with superior flexibility and performance, whether processing the dual-RF front-end data stream in real-time or post-processing IF samples from storage. Graphical user interface provides easy access to signal processing configuration properties and gives real-time feedback for channel output, correlation function and RF spectrum.
RaceLogic The 2015 leap second – LabSat scenarios now available With the LabSat 3 Simulator you can reliably test your products on the bench to see how they cope with events such as the leap second, alongside standard issues such as multipath and signal obscuration. Recordings of the leap second from the three main constellations are now available for use with LabSat 3.
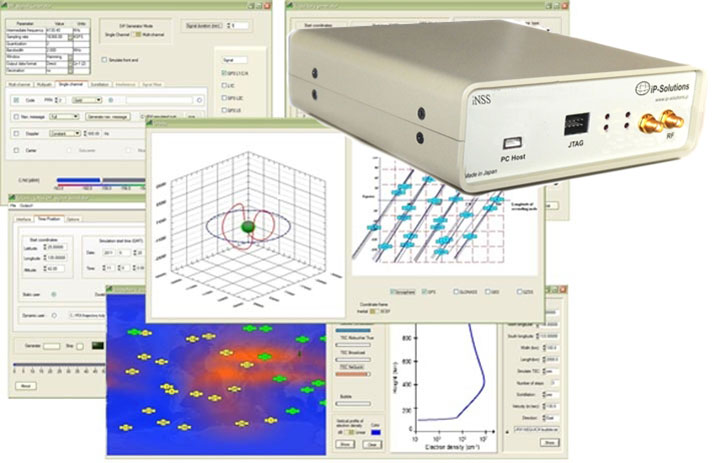
IP-Solutions Replicator GNSS RF simulator, recorder and playback device — inexpensive, economical, flexible, with a high-fidelity GNSS simulation solution. This product was originally developed cooperatively for JAXA (Japan Aerospace Exploration Agency). Originally developed for, and in cooperation with, the Japan Aerospace Exploration Agency (JAXA).
Cobham AvComm ATC-5000NG NextGen ATC/DME Test Set Formerly the Aeroflex AvComm business unit, Cobham introduced this year the ATC-5000NG NextGen ATC/DME Test Set, an RF signal generator/receiver for testing Mode A, C and S transponders. The ATC-5000NG was designed with modern software-defined radio technology for engineering development, design validation, manufacturing and return-to-service testing.
TeleOrbit GIPSIE TeleOrbit’s software-based GNSS multi-system performance simulation environment, GIPSIE, consists of a satellite constellation simulator and an intermediate frequency simulator. The digital signal simulator GIPSIE streams the software-generated signals or recorded live data exactly into the receiver’s baseband processing chain to support development, test, verification, validation, qualification and certification.
Averna RP-6100 The Averna RP-6100 Multi-Channel RF Record & Playback for RF application testing allows users to to record real-world signals such as GNSS, HD Radio, LTE and Wi-Fi, plus impairments, to advance projects and harden product designs. Frequency range of 10–6000 MHz, up to 4×40 MHz or 2×80 MHz bandwidth, 14-bit resolution, tight channel synchronization. Records up to 22 hours, supports Skydel’s software-defined, real-time GNSS Simulator.
Syntony GNSS Syntony RTG2 Constellation Simulator Syntony offers the RTG2, a GNSS constellation simulator that generates realistic GNSS RF signals, taking into account the current and future GNSS constellations. The generator is entirely configurable (troposphere and ionosphere effects, simulated receiver trajectory, etc) through a user friendly interface accessible on a separated PC through Ethernet.
GPS to the power of PNT. Or, as I like to think of it, GPSPNT.
We are rapidly entering — or we have already entered — the era in which we say “GPS” but we really mean so much more.
We mean GNSS: GPS + GLONASS + Galileo + BeiDou.
We mean all of the above plus satellite-based augmentation systems (SBAS), now encompassing WAAS, EGNOS, SDCM, QZSS, IRNSS, and I don’t think we’re done yet.
We mean all the above plus several private-sector corrections services, including but not limited to OmniStar, StarFire, Veripos, Fugro, Terrastar, Atlas, and surely more to come.
We mean all of the above plus back-ups in the event of jamming or other interference: eLoran is a prime candidate, and there are others.
We mean all of the above plus many technologies that can be integrated — are being integrated — with GPS/GNSS to achieve a seamless position, navigation and timing (PNT) solution: inertial and other MEMS, cell ID, Wi-Fi, Bluetooth, DSRC, FM and UHF, and many more. Think of a band of the RF spectrum (or even non-RF technology as the mentioned inertial/MEMS); it’s probably on that list or soon will be.
We mean all of the above plus many forms of software that go into making up a geographic information systems (GIS) backbone, a map-matching system, a building information model (BIM) or other application and extension of the GPS data.
They all work together. They all need each other. But they all begin with GPS. Sometime tomorrow, they will all begin with GNSS. Today, GPS is the game in town.
Saying “we mean,” I denote “we” in the loose or editorial sense: this magazine. We treat all of the technologies as ways to get to the solution: the ubiquitous, seamless PNT solution. We’ve been wondering recently if the umbrella has grown too wide for “GPS” to continue to be its label.
No matter how professionally and technically correct both you and we aim to be by employing the terms GNSS, PNT and integrated positioning technologies as appropriate, the world at large probably will continue to call all of the above “GPS.” And the label remains the easiest shorthand for all of the above. That is one of the reasons we have decided to continue calling this great magazine GPS World.
But we really mean so much more, and the pages that follow this one, and will follow in months to come, bring you so much more — fulfilling the promise of the “kicker” in our new name: GNSS, Position, Navigation, and Timing.