In the novel The Martian, an astronaut must navigate around a duststorm using his wits.
By Tracy Cozzens Managing Editor
Last year on my way home from ION GNSS+, I spotted a bright orange book in the San Francisco airport. The Martian, by Andy Weir, is now a major motion picture — a wonderful movie, but one that left out a unique PNT adventure.
The Martian explores how a lone astronaut struggles to survive long enough to be rescued from the Red Planet. Weir sets his story in the near future, and grounds it in real-world science. How can a man survive in a hostile environment far longer than the supplies left for him will hold out? What life-support systems can he engineer with the resources on hand?
From page one, I plunged into a gripping adventure — sometimes on the edge of my seat, sometimes thinking about engineering and science in new ways. I found myself re-reading explanations for astronaut Mark Watney’s resourceful solutions (shades of MacGyver) to make sure I understood what he was attempting and how it might actually work. But Weir also infuses the story with humor, so it’s never dry. It moves quickly, jumping between Watney’s situation on Mars and mission control on Earth.
One sequence in the book describes Watney’s ingenuity in solving a navigation problem in a truly GPS-denied environment, with only the limited supplies he has on hand. I don’t want to spoil anything, but I will say that the solution includes old-school triangulation, with a few twists. With a fierce dust storm bearing down on him, Watney employs his knowledge of position, navigation and timing to aid in his own rescue. I was reminded of this as we at GPS World embark on our own adventure, reimagining our scope to include PNT and other location technologies. GPS, while still in our name, is far from the only solution.
While the movie is excellent, I suggest anyone who’s fascinated by the science in fiction pick up a copy of the novel that inspired it.
Q:Where do you see your efforts and thoseof your organization focusing primarily over the next 5–10 years?
Vidal Ashkenazi CEO, Nottingham Scientific Ltd.
A: GPS, and GNSS generally, will continue to be a big part of our work and remain at the core of our activities. We are not tied to a single technology, though. We are driven more by applications — and so we do not rule out the use of other sensors. As GNSS becomes more widely used and people expect more from it, we will make greater use of additional sensors to fulfil application requirements in more demanding environments.
A: GPS was the catalyst for a revolution in the application of precise position and time (that is, “Positime”).But it’s now 20 years old, and the developed world has become dependent on access to Positime, still mostly from GPS but with many likely complements/backups going forward. It is time to get serious and construct a layered PNT architecture to bolster GPS with regional and local/autonomous PNT sources for resiliency and precision.
Terence McGurn Consultant, U.S. Government
A: That we need alternatives to GNSS is now a given. But I see little discussion of the strategy for deploying those alternatives. Currently, we seem to emphasize detection and mitigation of the cause of a GNSS outage. To use a medical analogy, the cause of the patient’s accident is a “nice to know”, but the real issue is to keep the patient/service alive. So I’d like to see more focus on how — and how quickly — we activate the alternatives.
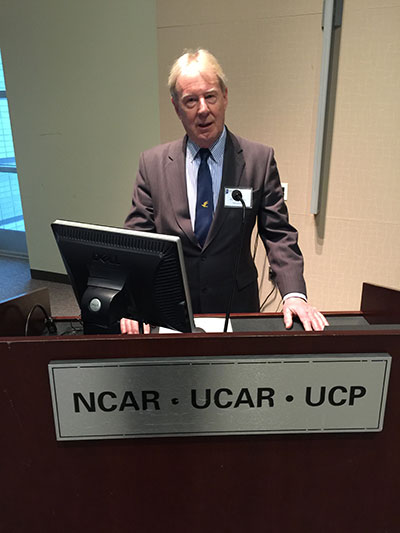
That is, in the People’s Republic of Boulder, Colorado. To those of us who live in Colorado, Boulder is known by this seemingly timeless but absolutely accurate appellation. This stunningly beautiful city located in the foothills of the Rocky Mountains, known as the Flatirons, is where the National Space-Based Positioning, Navigation and Timing Advisory Board (PNTAB), which provides independent advice to the National Executive Committee on Space-Based PNT (EXCOM) from outside the U.S. government, chose to meet in the waning days of October 2015. Ironically, they chose the same week as a Republican presidential candidates debate, which took place at the University of Colorado just a couple of miles away. The PNTAB was also concomitant with the ICG, the Tenth Meeting of the International Committee on GNSS (ICG-10), held Nov. 2-5, 2015. Both the PNTAB and ICG were held at the Boulder NCAR/UCAR facility, University Corporation for Atmospheric Research Center Green Conference facility.
PNTAB
The PNTAB serves a vital purpose. Board memberse advise the highest levels of the U.S. government (USG) concerning all matters relating to PNT. This open-ended charter covers a multitude of sins, and as the new PNTAB Chairman John Stenbit, stated clearly, it is important to focus on the doable, even if it seems difficult, but not to tilt at windmills. I have known and worked with John Stenbit for more than 25 years, especially during his two stints in the Pentagon, and I find him to be extremely knowledgeable and ethical. He is certainly well-spoken and gregarious, but he does not suffer fools, and is known to be resolute, which is a pseudonym for stubborn and hardheaded, but in a good way. I look forward to his chairmanship.
PNTAB Members at 16th Meeting in Boulder. New Chairman John Stenbit is center of last row. (Courtesy of gps.gov)
You can view the PNTAB presentations at the www.gps.gov website. While there, you will note there were more than 25 presentations, and most were excellent. Only a couple required the audience to consume copious amounts of caffeine to remain coherent.
In the end, the PNTAB adopted courses of action (COA) on which to formulate recommendations for the EXCOM. For our purposes, the pertinent COAs centered around two main subject areas: Spectrum protection and eLoran. The spectrum protection issues are fraught with equal parts litigious danger and tedium. Not coincidently, the World Radiocommunication Conference 2015 (WRC-15) kicked off in Geneva, Switzerland, on Nov. 2, just two days after the end of the PNTAB. Several of the PNTAB members attended the closing Saturday night PNTAB dinner and flew from Denver direct to Geneva Sunday morning, just in time for some minor jet lag adjustments, and then attended the opening ceremonies of WRC 2015 in snowy Switzerland.
I have had the dubious privilege of observing several International Telecommunication Union (ITU)-sponsored WRC sessions in the past, and it is certainly a critical spectrum decision-making body. (Seriously, folks, 26 days of talking and wrangling about spectrum? Praise the Lord the Swiss know how to brew strong coffee.) WRC 2015 wraps up on Nov. 27. In this regard, Ann Ciganer, who serves as an official PNTAB representative and the executive director of policy for the GPS Innovation Alliance (GPSIA, formerly the U.S. GPS Industry Council), is my hero. She has been working spectrum issues for more than 20 years. She has the fortitude of FDR and the patience of Job.
Since the spectrum and spectrum-protection issues are still being coldly debated in Geneva, let’s take a look at the PNTAB’s second major topic, eLoran. While eLoran was discussed ad nauseam, there was one definitive standout presentation given by my old friend and colleague Professor David Last. David is Professor Emeritus at the University of Wales (Bangor) and former president of the Royal Institute of Navigation (RIN). As he is wont to do, David held forth, with that wonderful, attention-arresting British public school accent, on eLoran matters before an appreciative audience. David presented his topic with equal parts passion and credibility. You can view his presentation material in its entirety (the PowerPoint slides, anyway) at www.gps.gov, but you will not have the wonderful experience of having him present it personally with all the attendant persuasion, and dry British humor and wit.
eLoran European Style
David immediately makes the point early on in the historical portion of his presentation that the U.S. first committed to Loran-C more than 75 years ago, and as recently as 2010 upgraded a majority of the sites to eLoran status only to have the current administration shut down Loran just after officially assuring the United Kingdom the U.S. would keep Loran up and running. Now the U.S. is in the position of looking for a backup and major terrestrial augmentation to GPS (GNSS) and is once again considering eLoran.
Professor David Last at 16th PNTAB
Professor David Last at the 16th PNTAB meeting. (Photo: Don Jewell)
Professor Last explained the difference between our viewpoints. “I see it from a British perspective, and a European perspective. I watch administrations in other parts of the world grappling with the same decisions the U.S. faces. The U.S., of course, is in a unique position: it is the source of GPS, the world standard in satellite navigation. And over the nearly 40 years since the first satellite was launched, the U.S. has taken the lead in learning to understand the role of GPS, from its military-only origins, through when it was a novelty with its first civil applications, through a period of hubris in which it was to replace every other means of navigation on land, sea and air, to its present role, so deeply embedded in your national life as to form a critical component of national infrastructure. The U.S. was first to recognize the vulnerabilities of GPS, to understand the threat they posed to your nation and to seek ways of mitigating them. That topic came to dominate technical conferences first in the U.S. and now around the world. And it has led to a policy debate of quite exceptional difficulty, one that is shared by all governments.”
The Message
What David did not come right out and say, although I maintain it was implied by his tone of voice and body language, is that this discussion is at times both energized and denigrated by those that refuse to acknowledge GPS or GNSS vulnerabilities and those that would be happy to see it revert to a military-only system — the proverbial ostrich syndrome. David made it clear that GPS vulnerability discussions must take place publicly in the U.S. because they are, in fact, global discussions. “All space-based PNT systems today are similar to GPS in concept and technology, and referred to by most users as GPS,” he said. “Very few bother or even know about Galileo, GLONASS and BeiDou. To them, it is all simply GPS.”
David went on to make his point by describing the ubiquity and pervasiveness of GPS and GNSS. “Now there is no area of transportation, commerce, industry or telecommunications in your country or mine that does not employ satellite navigation.”
Indeed, David described how other GNSS systems came about due to national pride, and yet they had no choice but to mimic GPS both technically and officially, since they must for safety-of-life concerns reside in the same regimes and crowded radio bands.
David stated, “Soon, these new GNSS became invested with immense national pride. Their vast cost had to be justified by claims of technical superiority. In reality, engineers know that their designers had no choice but to make them compatible with GPS, since GPS was decades ahead and the world standard. These new systems also had to squeeze alongside GPS in the narrow radio bands allocated internationally to navigation. Not surprisingly, indeed happily, all our new GNSS turned out to look very like GPS: versions of the same technology — with just a hint of garlic here, a whiff of curry there. This similarity is obvious to engineers and to navigators, though rarely to politicians.”
DOT Volpe GPS Jamming Report
Professor Last referred to the U.S. provider and user communities as groups that, prior to the important 2001 Volpe Report, failed to acknowledge that GPS had any serious vulnerabilities. That report was a watershed event for the future of GPS, and for me as a journalist. Among other jamming incidents around the country, a major jamming occurrence in San Diego harbor affected GPS-dependent systems (mostly those dependent on accurate timing) and users for miles around. It became a wakeup call for GPS and GNSS users globally; I wrote a Defense PNT column on it in this space in 2007.
David put it in perspective. “To understand the perceptions of those governments, wind back the U.S. story to before the Volpe Report on GPS vulnerability with its recommendations that led to your [PNT Advisory] Board’s policy of ‘Protect, Toughen, and Augment’. Despite the growth of jamming and even attacks by one sovereign nation on its neighbor, despite the appearance of low-cost spoofing, there has never been a Volpe Report anywhere outside the United States. The pre-Volpe culture of the denial of vulnerability is alive and well and living in Europe.”
“Thirty-seven years after the launch of the first GPS satellite, there is still little recognition by the world’s governments of how essential resilient position, navigation and timing have become to the critical infrastructure of their nations,” Last said.
After the Volpe Report came an industry report chaired by the Father of GPS, Professor Bradford Parkinson (Col, USAF, Ret), describing eLoran as the only cost-effective method of backup to GPS. The report was published globally, and then the United States completely failed to implement the transition from Loran-C to eLoran. At the time it failed politically, the Loran-C to eLoran conversion was 85 percent complete and only needed a small amount of funding for the future. Luddites within the U.S. OMB (Office of Management and Budget) managed to kill the program just short of completion. Unfortunately, the message to the world of GPS users was the U.S. had categorically rejected eLoran as a complimentary PNT system.
David presented the European point of view: “The Volpe Report, an FAA study, proposed and demonstrated Enhanced Loran (eLoran). GPS-like digital techniques were applied to the obsolete Loran-C low-frequency system. The result were astounding: it met the accuracy, integrity, availability and continuity standards of certain aircraft instrument approaches plus the very demanding port-entrance requirements of shipping, and it delivered precise timing to support telecomms. Brad Parkinson’s high-level study group of industry leaders said this was the only cost-effective GPS substitute for U.S. needs.
“The world outside the U.S. watched the Department of Homeland Security announce eLoran as the U.S. national backup to GPS and then completely fail to implement it! That message, that the U.S. does not need a complementary system and has rejected eLoran, is the current understanding of U.S. policy in many countries.”
Professor Last maintains the same eLoran drama is now being played out in Europe in real time. The UK developed its own eLoran system from the North of Norway to the South of France which, while it only officially achieved initial operational capability on Oct 31, 2014, has in fact been running flawlessly 24/7 for three years.
The message to the world, especially Europe, should be that the eLoran concept proposed by the U.S. FAA (Federal Aviation Administration) really works and is easy to implement. It has been, in fact, implemented and maintained in the UK by a mere handful of personnel.
However, according to David, the European eLoran system may never reach FOC (full operational capability) because currently Western Europe lacks any coordinated plan to respond to the vulnerabilities of GPS and all other PNT systems. Many have yet to embrace or even recognize the Volpe Report.
Indeed, several European countries are planning to shut down their eLoran systems supposedly since that is what we (the U.S.) did and it seems to be working for us.
David explains that “this [proven] system may never reach Full Operational Capability. Western Europe lacks any coordinated plan to respond to the vulnerability of GPS — why, who needs that when Europe has Galileo and EGNOS! The governments who control the Loran stations in Norway and France, observing that mariners no longer want Loran-C, plan to close down the transmissions just nine weeks from now, and demolish the infrastructure. After all, they say, that is what the U.S. did.”
Service Alternative
To paraphrase Winston Churchill, this was indeed not our finest hour. However David maintains there is a realistic commercial alternative: provide eLoran as a service. This is exactly what some in the United Kingdom and Europe are considering. It is a totally viable alternative, but David asserts that what would really help “is a positive signal from the United States.”
Continuing in the same vein, David posits “all is not lost. Responding to the future — indeed, the present — needs of the telecomms and broadcasting industries, and driven from the U.S., there is a commercial plan to take over and operate that European Loran infrastructure and sell its services to government and industrial users. If governments struggle to seize the initiative in this area, let the market — and good old greed — provide the mechanism for realizing the multiple benefits, paying the costs and making a profit. But I believe that this initiative will only succeed in Europe, if there is a positive signal from the U.S. The world listens to signals from the U.S., from the EXCOM, from this board.”
Unique Organizations
Historically, relationships between multi-GNSS systems are confrontational at best; however, David states clearly that Europeans realize the PNTAB and EXCOM are unique and unprecedented around the world. “These official government entities recognize and advocate for resilient PNT that is of major importance to critical infrastructures of the U.S. and other nations as well.”
In actuality, the U.S. has faced up to these vulnerabilities thanks to the PNTAB and EXCOM, two truly unique organizations. Undeniably, there is an incalculable polyphonic argument to be made concerning the vulnerabilities of space-based PNT systems such as GPS and how to mitigate them, but globally beyond the PNTAB and EXCOM, no one is officially having these critical discussions.
In the end, according to Professor Last, over the next nine weeks the immediate future of PNT really comes down to one critical question: “Will global PNT with eLoran be a global system or a nationally unique system?”
David supports his cogent argument for eLoran by giving excellent examples of GPS and multi-GNSS jamming supporting his insightful adage, “Space-based PNT systems live and die together.” They are all subject to the same vulnerabilities.
Wrapping up his refreshingly insightful presentation, Professor Last posed two questions to the PNTAB:
Does the U.S. see a role for eLoran as a complement to resilient GPS?
Does the U.S. recognize and encourage the move to GNSS receivers that take advantage of multiple constellations?
As one PNTAB pundit opined, “The critical issue for the U.S. government is we have to break the mold. The current administration is too often technologically controlled by Luddites and held hostage by low-level bureaucrats within OMB.”
Professor Last appropriately has the last word: “The bottom line for the PNTAB, EXCOM and USG is that the United Kingdom, nee Europe, is asking for support on eLoran.”
Until next time, happy navigating and don’t forget your GPS when you head over the bridge and through the woods to Grandma’s house. Happy Thanksgiving!
When I was the GIS manager of the Atlanta Regional Commission, the most rewarding and important work we did was geospatial support for our first responders. The culmination of this effort was creation of a portable GIS that we could set up in the field on short notice anywhere in the region to provide situational awareness for first responders.
The system consisted of two laptops, external hard drives, a HP “E”-size plotter, foam-board laminator and an LCD projector — all housed in a portable tent. We used ArcInfo and ArcView to build and overlay vector data on ortho/oblique aerial imagery to aid visualization.
We found that police and firefighters especially liked our large laminated plots of imagery overlaid with street data, because the aerial images were easy to understand and the GIS data provided needed location references. The hard-copy plots required no computer and could be marked up with grease pencils.
Helping in our small way, we provided the same kind of large plots of New Orleans to the Louisiana National Guard days after Hurricane Katrina hit. We later learned that the plots were used by National Guard headquarters to keep track of search-and-rescue efforts by marking up neighborhood blocks with grease pencils and recording search results. They crossed off buildings that had been searched and recorded urban rescue information such as who did the search, and the date and number of live or deceased bodies found. The hard-copy plots were a low-tech embodiment of higher tech GIS data and imagery.
Nine years later, the National Geospatial-Intelligence Agency (NGA) developed a similar but higher tech and more robust system called GeoQ.
GeoQ: Geographic Work Queueing and Tasking System
GeoQ is an open-source geographic tasking and management system that facilitates collection and display of diverse geographic and geographically tagged data across large areas to provide situational awareness for all involved. As needed, the large areas can be broken down into small grid squares and assigned to teams or team members for detailed analysis or tasking.
The system is designed to be very transparent so all involved can view the workflow and assist as needed, while avoiding duplication of effort. This NGA video is a well done and rapid overview of GeoQ.
GeoQ software was developed by NGA and the MITRE Corporation to leverage NGA tools and data to the benefit of Homeland Security personnel. In 2013, the leadership at NGA made a gutsy decision to share some of their unclassified geospatial tools with the nation’s first responders through GitHub, an open-source software developers’ online collaboration environment. With more than 2 million participating programmers, GitHub hosts more software source code than any other single service in the world.
GeoQ was the first NGA product shared through GitHub, and was in keeping with a change in philosophy at NGA to take advantage of feedback and improvements generated by the huge and diverse talent pool available through GitHub. NGA was the first intelligence agency to share some of its work in this open-source environment, and the results have been extremely beneficial to all involved.
The Huntsville Connection
With more than 70 geospatial firms and agencies, Huntsville, Ala., has always been an early adopter of geospatial technology. Several years ago it was again a Huntsville team that developed a first-ever Google Earth Enterprise-based emergency response system called Virtual Alabama. The system was so effective that eight other states adopted the model. Work was underway to build a national version when Google announced the phasing out of Google Earth Enterprise. We now know that Google was not motivated to build authoritative geospatial systems, but was focused on building products and services that attracted customers so it could accomplish its primary business of selling advertising.
Fortunately, the work of the Virtual Alabama team was not wasted. Team members became experts regarding first-responder operations and their unique situational awareness requirements. They learned that first responders needed much more than just a GIS. The best analogy I can think of is that one could use PowerPoint as a word processor, but that wouldn’t be a very efficient system. Likewise, MS Word could be used for presentations, but not as elegantly as PowerPoint. The same holds true for rapid dissemination, communication and perception of a common operational picture. Geospatial tools and analysis are part of situational awareness, but the work flow and many components are different, not necessarily spatial and need to be assembled and processed at their own pace.
The timing was almost perfect, since GeoQ was released as Google Earth Enterprise was being phased out. Huntsville again seized the opportunity to build on its experience, and GEOHuntsville became a prime GeoQ testbed. I recently met with Chris Johnson, one of the early Virtual Alabama leaders and president of A Visual Edge, Inc., a Huntsville geospatial firm. She demonstrated GeoQ and Huntsville’s role in advancing the technology.
GitHub has a very thorough description of GeoHuntsville, a non-profit 501c6, and its role with NGA to test and share lessons learned through a “Blueprint for Safety” pilot project involving other cities to improve rapid disaster response. The sharing of lessons learned, code sets and documentation through the multi-city collaboration is called “Exemplar City.”
Another aspect of the Blueprint for Safety is support of rapid sensor deployment in support of first responders through common standards. Sort of a “plug-and-play” for complex devices. (See the GeoQ projects page and the OpenSensorHub.)
There is quite an extensive collection of material on GitHub regarding GeoQ and other NGA, projects including support of FEMA and GeoQ technical specifications. NGA doesn’t directly support these efforts, with legal language such as “NGA assumes no responsibility for the use of the software by any parties, and makes no guarantees, expressed or implied, about the software quality, reliability, or any other characteristic.” Still, NGA is behind the creation of the software and is working on other tools and support that will expand the capabilities. Participation of both GeoHuntsville and the Federal Emergency Management Agency (FEMA) bodes well for future use, since I don’t envision the same situation we ran into with Google and Virtual Alabama/USA.
Update on What3Words
In February, I wrote about what3words. The simple what3words system is now available as a locator, accessible via the Esri ArcGIS platform.
I was born in a small town and I live in a small town. I’ll probably die in a small town, but only if you want to call a blue-collar city of 75,000 people small. My friends are small town and my parents still live here in this same small town. It was here in this small town that I started my career as a surveyor and circled back for an opportunity to be near family and friends.
There are many towns, villages and cities in the Midwest that fit this description — mostly because of the agricultural background, but also because of the labor-intensive industries that provide most of the local jobs. Like those who prefer the large city hustle-bustle lifestyle, the small town attitude is the same, but in the opposite direction.
My career as a surveyor has provided me with opportunities to work in both small and heavily populated areas. I have seen the definite distinction between the two environments, and have seen many of the technological advancements of the past few decades. Having worked in both the large urban multi-discipline engineering firm and the small town surveying firm, I see much disparity between how surveying is done today from varying firms. The biggest difference I see today is how surveyors are using GPS technology for their field operations.
For the modern surveyor, GPS has become an everyday tool for measuring and data collection, but it wasn’t always that way. I began my career in the early 1980s working for a seven-person engineering firm in my small town, so GPS was never in our budget. Like most surveyors, I read about GPS use in technical publications, and was amazed what these magical boxes could do. The first generations of static receivers produced were very complicated and expensive. With long occupation times and even longer processing times, only the few companies who could afford the high-priced equipment and software were buying these units. Our small-town market could not justify this purchase, so we made do with conventional equipment as the norm.
Today’s environment requires the working knowledge of handheld data collectors that are more powerful than the computer on the Apollo moon mission, laser scanners that collect millions of points per second, and GPS receivers that talk through cell phones to get sub-centimeter accuracy. Around the corner is wider use of lidar data collection as well as the unlimited use and application of UAVs with cameras and scanners, so there is no end in sight for technology and the surveyor.
Most of the larger urban firms have established equipment and training budgets stay current with technology and not lose ground with the competition. Because of these strategic and spending plans, fee structures have increased over the years, and thus the cost of surveying has increased accordingly. This has also afforded those who stay up-to-date with current technology to push the limits of the equipment, and to continue to find new and useful ways to perform our work and provide newer services.
By keeping their costs down, small-town and rural surveyors have kept their fees down as well, but to the detriment of the profession. In fact, the cost of a typical land survey in a small town has come nowhere close to inflation for the past 40 years in most places.
In comparison, however, many industry partners of the surveyor have spent a great deal of money and time staying current with technology and production methods. Excavators and earth movers now have GPS-based computers controlling their movement and placement of material, as well as utilizing robotic instruments and GPS for layout of improvements and utilities. Architects and structural engineers are utilizing scanners for building and piping as-builts for existing and future improvements. Almost all farmers have tractors equipped with GPS-based control systems to help them plant and harvest with pinpoint accuracy, as well as apply herbicides or pesticides based upon high-tech mapping performed by crop analysts. Many land-management companies are gearing up with UAV technology to assist future operations with the information gathered by these flying wonders. Everyone around us is tech savvy, but the small surveyor seems to lag behind.
I wanted to be exposed to new technology when I moved from a small town to a large urban city in 1998. The big improvement for the surveying community was the introduction of real-time kinematic (RTK) methods. The firm I worked for during the late 1990s and early 2000s had been using RTK systems since their introduction. Being able to collect points “on the fly” both manually and with ATVs greatly increased our productivity as well as accuracy.
By the mid-2000s, almost every big-city firm utilized this technology as standard equipment for their crews. The only drawback to the RTK system was the need to leave a base-station receiver, so the introduction of the real-time network via cellphones in large market areas was another step in solidifying GPS use for everyday work.
Another benefit of extensive GPS use in the large city area is that most of the firms keep their surveys on state plane coordinate systems, so exchange and verification of data is a much easier process. These larger urban firms also continue to upgrade to newer equipment as more satellite systems are introduced. The addition of GLONASS has increased our precision and coverage levels, with future systems including Galileo, IRNSS and BeiDou set to raise that bar even higher.
On the contrary, many firms in small-town and rural areas have not progressed into new technologies because of cost and lack of cellular coverage needed for RTN systems. I moved back to my small town several years ago and have experienced this slip in technology firsthand. The big cellular carriers say they have 3G and 4G service in most places, but I can tell you from my travels that there are many places I have not been able to use our RTN receiver because of lack of cell signal. Most of the surveyors in our area still utilize an RTK system and will establish a position through OPUS or will assume a local coordinate system. Not many have upgraded their equipment to take advantage of GLONASS, so there are several steps they will need to take in the future to catch up to the industry. We also must travel greater lengths to recover NGS monuments for our positional verification, which will become more important as static monuments become a thing of the past.
So with my apologies to Mr. Mellencamp, my job as a surveyor has not been just small town, and has provided me with many big-city opportunities. Our crews face challenges here every day that many take for granted while in the big city market, including RTN coverage, GLONASS constellation usage and many more NGS monuments for QA/QC. Having more of these items could greatly help our productivity, especially when stronger cellular coverage is expanded to more of our rural areas.
I look forward to these improvements but will continue to work with our existing systems until that time. So look for us, surveying on in our small towns and locating all those little pink houses.
This column introduces Tim Burch, GPS World’s new co-contributing editor for survey. Tim will alternate with Dave Zilkoski in contributing monthly columns to the Survey Scene e-newsletter. Tim is survey department manager for Chastain & Associates LLC in the Decatur, Ill., area. He has been working as a professional land surveyor since 1985, and is the secretary, Board of Directors, National Society of Professional Surveyors.
For his next column in January, Tim plans to write about farmers and their technology in his area, focusing of course on GPS use. His article will compare surveyors’ processes with those used by farmers. (For Dave Zilkoski’s last column in October, see Establishing Orthometric Heights Using GNSS — Part 3.)
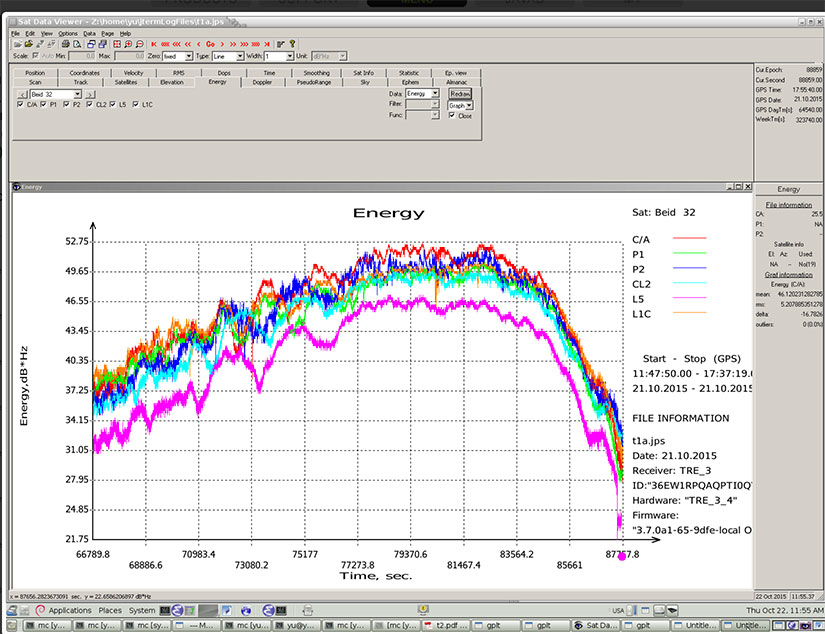
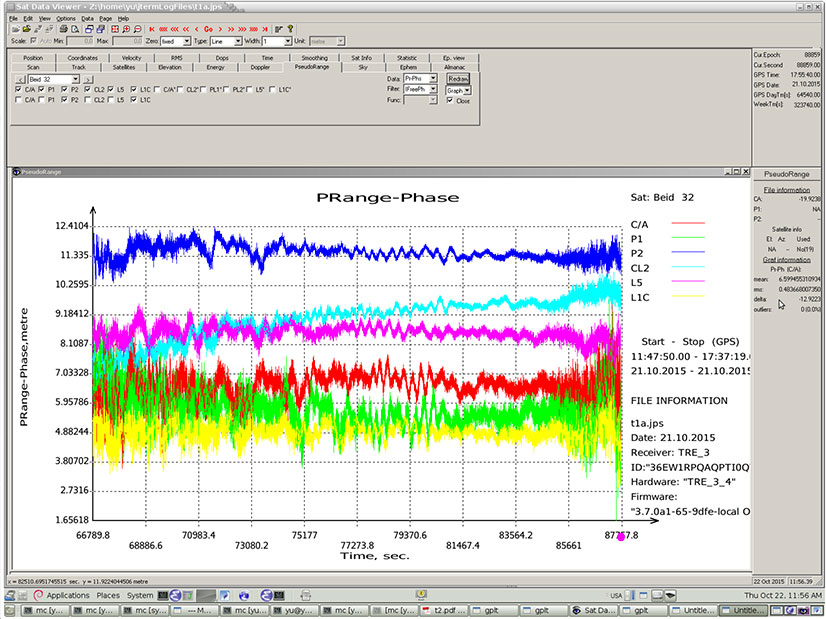
China’s new third-generation BeiDou satellites are broadcasting some new signals in space. The newest signal, which just began broadcasting from a satellite launched on Sept. 30, is similar to the future GPS L1C signal with time-division BOC(1,1) and BOC(6,1) signals. Such a type of modulation is called time-multiplexed binary offset carrier (TMBOC, see note below).
Researchers at JAVAD GNSS have been tracking the new signals, particularly those from Beidou-3 I2S, an inclined geosynchronous orbit (IGSO) spacecraft, NORAD number 40938. I2S is transmitting on three frequency bands.
In addition, new signals on 1575.42+1.023*14 MHz (B1-2), 1176.45 MHz (E5A) and 1207.14 (E5B) frequencies for three satellites (PRN 32, 33, 34) also have been decoded and tested.
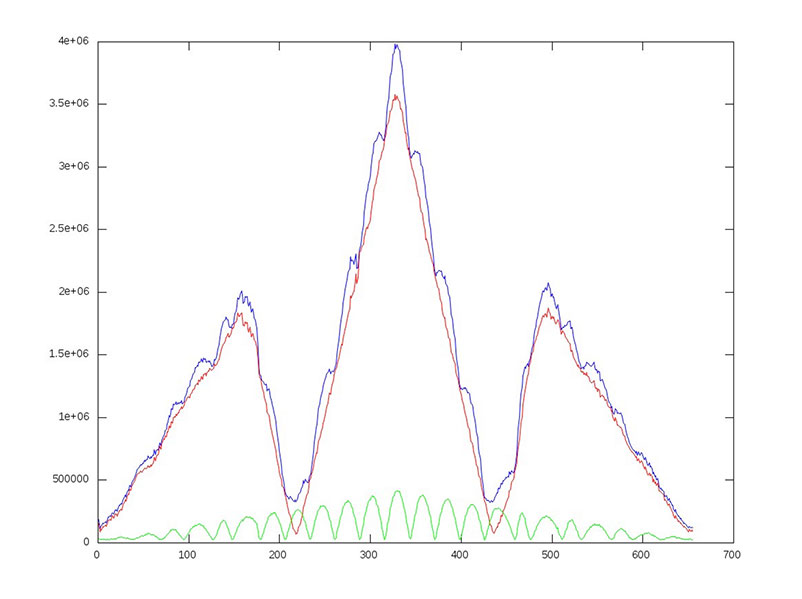
The following graphs illustrate the experiment:
I of BOC(1,1) (red), BOC(6,1) (green) and their sum (blue) vs code shift.
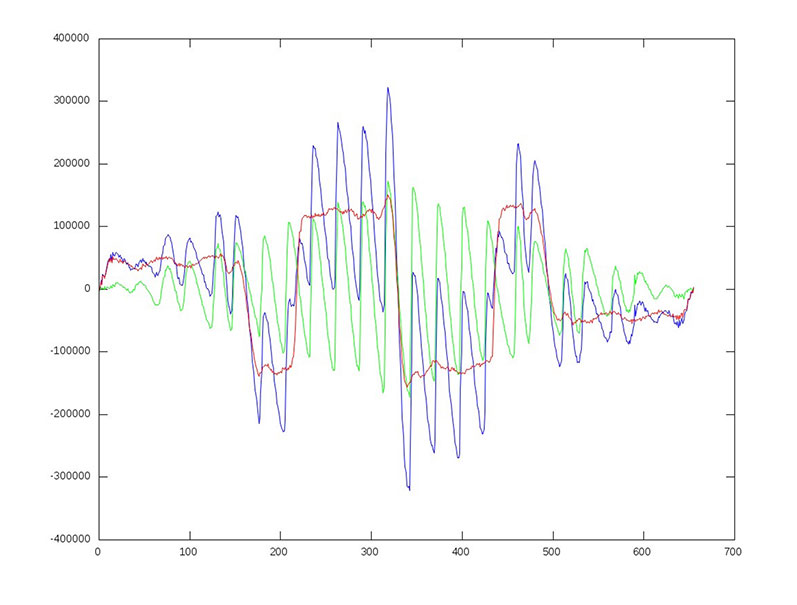
dI of BOC(1,1) (red), BOC(6,1) (green) and their sum (blue) vs code shift.
Horizontal axis: 0 – minus one chip shift; 327 – zero shift; 655 – plus one chip shift
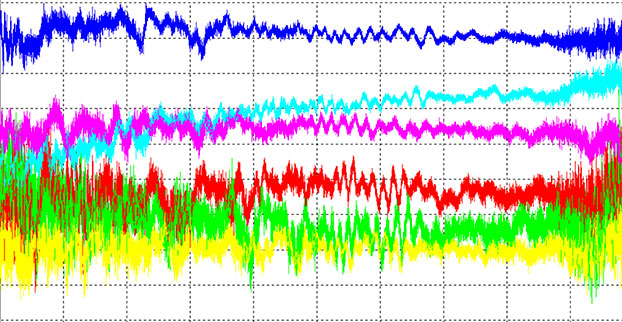
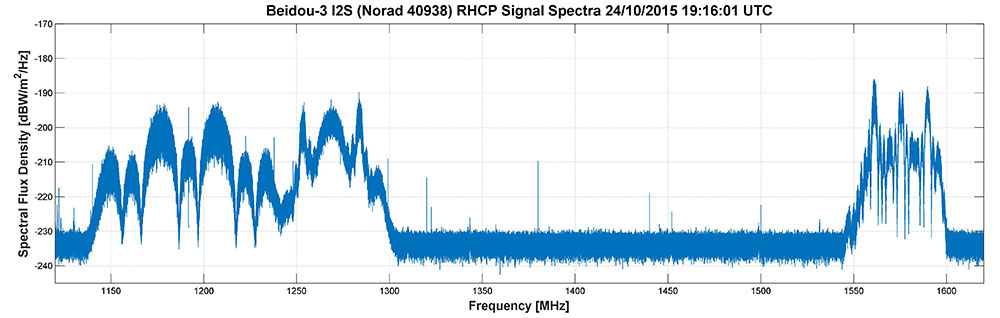
Researchers Steffen Thoelert, Oliver Montenbruck and Michael Meurer from the Deutsches Zentrum für Luft- und Raumfahrt (DLR, German Aerospace Center) have also been busy tracking the newest BeiDou IGSO satellite. The following diagram shows a spectral measurement of the complete GNSS L-band frequency range, which shows the signal transmissions on B1, B2 and B3 band. The signal was captured with DLR’s high-gain antenna in Weilheim, operated by the DLR German Space Operations Center in Oberpfaffenhofen.
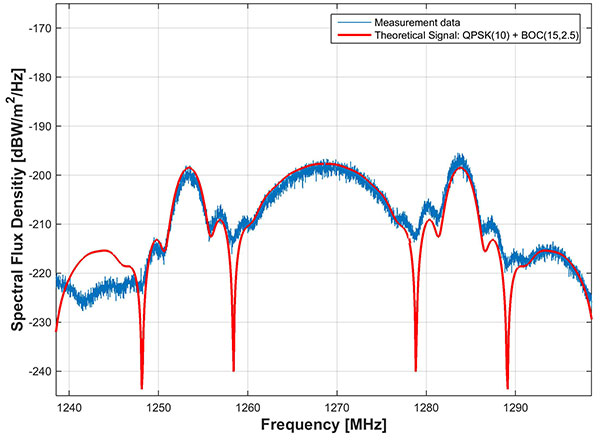
In comparison to the two latest Beidou-3 MEO satellites, launched on July 25, the IGSO has an additional signal on the B3 band. The MEO satellites transmit only the QPSK(10) while the new IGSO also transmits an additional BOC(15,2.5) signal. The following picture shows the B3 frequency band separately including a combined theoretical signal (QPSK(10)+BOC(15,2.5)).
The newest BeiDou satellite is the first in that constellation equipped with a hydrogen maser atomic clock. A series of tests related to the clock and a new navigation-signal system will be undertaken.
China plans to expand the BeiDou services to most of the countries covered in its “Belt and Road” initiative by 2018, and offer global coverage by 2020.
Earlier this year, China stated that one of the July-launched MEO satellites was working autonomously and had set up a link with the other satellite, successfully testing the autonomous control technology of the Beidou constellation. The inter-satellite link realizes communication and distance measurement among satellites, bringing autonomous control of the system a step closer.
Autonomous navigation is the project’s key to global operation. It enables satellites to work independently, providing users with more accurate data, according to BeiDou design engineers.
Wireless LBS Contributing Editor Kevin Dennehy sits in Delorean connected vehicle on “Back to the Future Day” Oct. 21 sponsored by ITS America.
The battle over when autonomous vehicles will be on the road for consumers seems to be divided along government/big auto companies/academic institutions vs. such technology companies as Google, Uber, Tesla and others. Two recent Washington events highlighted the gulf in expectations for full autonomous vehicle rollout. The question is, why are the two groups so far apart? Funding? Safety? Cyber Security?
WASHINGTON — A panel of business and auto experts discussed the quick rollout of autonomous vehicles and the implications on business and consumer mobility at an Oct. 14 National Press Club meeting here. In terms of the time for consumer rollout, Google founders Larry Page and Sergey Brin attended a DARPA autonomous vehicle challenge in 2007 and determined they didn’t want to wait 15-20 years to roll out a business, said Larry Burns, Univ. of Michigan professor and Google consultant.
Burns said that when he was the vice president of research and development at GM, it would have been hard to convince company execs and lawyers to go ahead with full-blown autonomous technology, while such technology companies as Google are forging ahead.
Burns acknowledged the technology has to work as the automobile is a complicated and sophisticated machine. “Google has driven over a million miles. They have engineers and technicians capture any real-time incidents and take them back to a lab to create computer programs. I can tell you the technology is very close,” he said. “I think we need to get a small fleet on the road in one place, because the technology has to be proven on real roads, to see what human drivers have to deal with. We have the tendency to rush to large volumes because we think it is the answer, but we need to learn on a small scale — and share the data between regulators and legislators.”
While Burns concentrated on the usual story — autonomous vehicles will dramatically decrease worldwide highway fatalities — he said that a new automotive DNA will shape a new market that will focus on the rise of electric vehicles and a sharing economy. “There will be more shared vehicles and the opportunity to created tailored vehicles. Average speeds are 25 miles per hour and most trips are less than eight miles,” he said. “It will change our dependency on oil, land use, parking and access.”
With automated technologies, a car will be able to decrease in size to 1,000 pounds, which allows an electric car’s battery to work more efficiently, Burns said.
Although they do not have an autonomous vehicle strategy, one Domino’s Pizza executive said that the technology would be important for their own fleets, but the franchisees would have to see a return on investment to purchase their own fleet.
“We own supply chain centers and drive 22 million miles delivering food to thousands of stores,” said Lynn Liddle, Domino’s executive vice president of communications, investor relations and legislative affairs. “The pizza industry has not been on the forefront of transportation. When we were founded, the goal was to get pizza to a dorm in 30 minutes. We are now into tech — quick ordering and texting through Ford Sync. Our Australian franchisees are using GPS-enabled systems that allow [customers] to know when their pizza is coming.”
Burns said he could see a two-person pod swinging by a Domino’s, hitting the post office and Fedex as part of the same trip. “The challenge of bringing goods to my door that weigh less than a pound in the last mile is formidable,” he said. “This is an exciting opportunity for the trucking industry. We may see this Class A trucks shortage of truck drivers [go away]. There is a great early opportunity for goods movement with a very good payback.”
One panel member from Securing America’s Future Energy, or SAFE, said the organization is establishing an Autonomous Vehicle Task Force, a group of industry experts that will assess the social, political, market and regulatory challenges of the new technology.
“It’s important to not be dependent on one fuel source, which is run by very high-priced cartels and national oil companies,” said Robbie Diamond, SAFE president and CEO. “This is the first time we have seen the convergence of technology and business models, not just the safety concerns. This is a once-in-a-century opportunity to have a better mobility system.”
Not Everyone Believes Autonomous Vehicles Will Be Ubiquitous By 2020…
Delorean connected vehicle at “Back to the Future Day” sponsored by ITS America.
Some transportation industry veterans don’t buy that the autonomous vehicle will have a quick rollout. While autonomous vehicles are great for short trips, they may not be the solution for families who live in rural areas, said Thomas Dingus, Virginia Tech Transportation Research Institute, at a Capitol Hill panel sponsored by ITS America Oct. 21.
“The bestselling car today is a pickup. Why would you want an automated vehicle if you live in the country?” Dingus said. “Some [autonomous vehicle] adoption will be at a lower rate, some not at all. We will still have drivers on the road. There is no doubt that automated vehicles are coming, but it will be slower than people think.”
Dingus’ Virginia Tech entity is part of the Virginia Connected Corridor Project, which tested autonomous vehicles on two interstate highways in the Washington, D.C., area recently.
One panel topic is the need for better highway infrastructure in order for automated systems to work. Case in point was the problems Tesla has been having with its new lane-control feature because it cannot read the on-the-road markings. “Automated vehicle technology doesn’t work when you don’t have good lane markings. People who said the technology is ready today are wrong,” said Hillary Cain, Toyota director of technology and innovation policy. “We really need to make better investment in our infrastructure.”
Cain also said that the industry is far away from achieving National Highway Safety Testing Administration Level 4, or full self-driving automation. “We are much farther away than we think we are,” she said.
Despite a nationwide shortage of drivers, one trucking industry executive on the panel didn’t seem sold on autonomous vehicles. “The [automated] solution has to be 99.9 percent safe. You have to prove you could have done better than with a human being driving,” said Alan Korn, Meritor WABCO director of advanced brake systems integration.
Also at the panel, Sen. Gary Peters, D-Mich., gave his opinions of the Google car and the new Michigan Mobility Transformation Center, and said the new autonomous technologies will be disruptive to whole industries. “The number-one job at risk is drivers. But the most dangerous vehicle on the highway will be driven by humans,” he said. “I had the opportunity to ride in the Google car, it’s a bit freaky.”
In other news:
Driverless, the Business of Autonomous Vehicles, will be held March 22-23, 2016, at the Crowne Plaza Hotel-San Francisco Airport. More than 30 speakers will discuss worldwide autonomous vehicle markets, safety and security, new technologies and other topics. Go to www.driverlessmarket.com for more information.
We fear the hacker who might corrupt the software system of our vehicles. Maybe they will subvert our brakes or steering. And Volkswagen gave us a new scare. Maybe we should fear the car manufacturer. Can we trust vehicle OEMs for the safety of self-driving cars? Before we buy a vehicle, most of us read reviews and test drive the vehicle. In a short drive, we can judge the peppiness of the engine and handling around corners. We can’t test the reliability of the vehicle software, a particular concern when it is going to be driving our car.
Tesla just released Autopilot, a $2,500 optional software upgrade which, in a blink, enables autonomous driving. Model S owners wirelessly download the software, and voila, have a self-driving vehicle.
This isn’t the first semi-autonomous vehicle. Volvo and Mercedes-Benz have these features, but at lower speeds or with the requirement that the driver touch the steering wheel at prescribed intervals. Toyota is playing catch-up, and announced a target to commercialize semi-autonomous cars in five years. Later this year, Toyota plans to launch three new car models in Japan with sensor technology and vehicle-to-vehicle and vehicle-to-infrastructure communication.
Tesla has been out in front of these efforts in speed and hands-off control with Autopilot able to drive at 70 miles per hour. A driver must have faith in an automaker’s testing, quality control and honesty to put himself in the hands of new software for such a ride. Aaron M. Kessler of the New York Times recently drove a Tesla with Autopilot. Within 20 minutes, he felt comfortable enough to withdraw his hand from near the steering wheel to his lap. He was confident in what he observed in those 20 minutes. Smart? I’m not convinced.
With Consumer Reportsdropping its recommendation of the Model S, Tesla is faced with public outing of problems that plague any new car model. In a survey of 1,400 survey Model S owners, Consumer Reports discovered noise, motors and door issues with the car. Shares of Tesla fell 10 percent with news of the pulled recommendation, and perhaps will lower confidence in the reliability of Autopilot.
Road & Track magazine recently sounded off to their readers that despite concerns that driving will no longer be fun, autonomous vehicles will arrive, wanted or not. Readers were warned of a future where self-driving would be allowed only on designated roads and would entail a higher insurance premium. The bet is that software from companies (VW?) will be more dependable than we humans.
If we take a quick look at what’s been happening with rules for regular commercial UAV operations, some might say progress has been mixed. If you live in Finland, then the news is quite good, while back here in the U.S., there have also been steps toward regulation for UAVs.
Just this week, the Department of Transportation moved to require that UAVs be registered. The DOT has created a task force to develop recommendations, with representatives from the UAS and manned aviation industries, the federal government and other stakeholders.
Finland just published what are being called “the most liberal aviation regulations in the world” for the operation of unmanned aircraft. Trafi — the Finish Transport Safety Agency — last week issued a Regulation for the “Use Of Remotely Piloted Aircraft and Model Aircraft” that puts an onus on operators to observe quite broad safety rules. Provided an operator provides details of the UAV and what you intend to do, and then observe some common-sense rules of operation, you are free to go fly.
In particular, if you keep a small UAV (less than 15 pounds) at a safe “escape” altitude, you are allowed under certain conditions to operate over populated areas and open area crowds, and to use either Visual Line of Sight (VLOS) or Beyond Visual Line of Sight (BVLOS) — things that are really hot-potato issues here and are not currently generally allowed in the U.S. The FAA has permitted some exceptions for trial news gathering, but otherwise flights over people and densely populated areas are strictly verboten.
Finland’s Robonic UAV launchers.UAV image acquisition in Finland.
The objective for Trafi is to pave the way for full-scale benefits to be gained from this new segment of aviation, and to create business and developmental opportunities — particularly for testing and experiments that may further develop business activities. A far cry from how UAV life has been evolving here in North America…
Meanwhile, the FAA missed its congressionally mandated Aug. 30 deadline to integrate UAVs into the U.S. National Airspace System (NAS). This wasn’t altogether unexpected, and the FAA has been trying to otherwise enable the commercial use of UAVs by issuing a whole bunch of waivers to applicants who are ready to accept interim FAA operational rules. However, last week the FAA did fill in one of the missing pieces for commercial operators by setting up a registration program for drones, and even included a requirement to also register all recreational “model aircraft.”
Back in early September, the Association for Unmanned Vehicle Systems International (AUVSI) issued a report that summarized how the first 1,000 FAA waivers are going. The FAA approved the first set of commercial operators on Sept. 25, 2014 — six film and television production companies. In the first year of accepting exemption requests, the FAA approved almost 500 out of about 1,500 petitions. As of Sept. 1, the FAA has gone on to approve 1,407 out of over 2,650 petitions, with approval of about 50 new operations a week. However, AUVSI says that the number of applicants continues to significantly outpace approvals – a dig by AUVSI at the FAA to move forward much more quickly to issue formal regulations for small UAV (sUAV) operations.
The analysis goes on to state the applications involved (with numbers):
Aerial Survey (512)
Real estate (350)
General aerial surveying (301)
Agriculture (164)
Construction (134)
Film and television (91)
Utility inspection (78)
Environmental uses (61)
Search and rescue (52)
Emergency management (38)
Insurance (25)
A wide range of commercial applications — even though the numbers seem to be a little confusing at first when reviewing only the first 1,000 approved applications.
California and Florida have the most approved applications, while 90 percent are with rotorcraft, as opposed to 10 percent using fixed-wing vehicles — most are battery powered with electric motors driving lift props. Of the UAV/UAS used, Aeryon Labs sold almost $2.5 million, DJI Innovations Inc. over $2 million, and SenseFly over a million, while 12 other manufacturers’ sales were also significant. Finally, vehicles weigh between less than 1 pound to over 200 pounds, carry payloads of less than one pound and up to 36 pounds, and fly at between 22 mph up to 82 mph for between 10 minutes and 210 minutes.
So is it better to be in Finland looking for perhaps less-frequent UAV commercial business opportunities with what looks like less restrictive regulations, or try to capture business in the U.S .with a complex approval/waiver FAA safety judgement process? My guess would be for a valuable commercial opportunity it would probably be still better to stay with the program, work through the FAA delays, and wait for something to break in the logjam of sUAS regulation approval and waiver applications. This week’s FAA announcement of a vehicle registration program proves that things are in fact moving along, albeit without a grate deal of apparent haste.
Part 1 of this column appeared in the June Survey Scene newsletter, Part 2 appeared in the August newsletter. Upcoming Survey Scene newsletters will carry additional columns in this series.
Basic Understanding of Scientific and Hybrid Geoid Models
David B. Zilkoski
In my first newsletter column of this series, I discussed the basic concepts of GNSS-derived heights. I discussed the three types of heights involved in determining GNSS-derived orthometric heights: ellipsoid, geoid and orthometric.
In my second column (Part 2), I discussed guidelines for detecting, reducing, and/or eliminating error sources in ellipsoid heights. The column focused on guidelines for establishing accurate ellipsoid heights in a local geodetic network.
This column, Part 3, will describe the differences between a scientific gravimetric geoid model and a hybrid geoid model, and why it is important to use both geoid models in your analysis. The latest published United States National Geodetic Survey (NGS) hybrid geoid model, Geoid12B, is made consistent with the United States National vertical height reference frame, that is the North American Vertical Datum of 1988 (NAVD 88). This means a user will be consistent with NAVD 88 when using GEOID12B to estimate GNSS-derived orthometric heights. However, this doesn’t guarantee that your GNSS-derived orthometric heights are accurate.
NGS’ new Beta experimental geoid height models xGEOID14B and xGEOID15B are not distorted to fit the published NAVD 88 heights so they are useful for identifying valid NAVD 88 bench marks (that is, ensuring the monuments haven’t moved since their last survey and their published heights are still valid). Therefore, it is extremely important to validate all NAVD 88 height constraints used to estimate accurate GNSS-derived orthometric heights. Understanding NGS’ scientific and hybrid geoid models will help the user perform the appropriate analysis to determine which leveling-derived orthometric height constraints should be used as constraints. This newsletter will focus on differences between geoid models in a local project area.
Information on NGS’ experimental geoid models can be found here.
Thursday, August 20, 2015
Yearly Experimental Geoid Model Available for Public Review
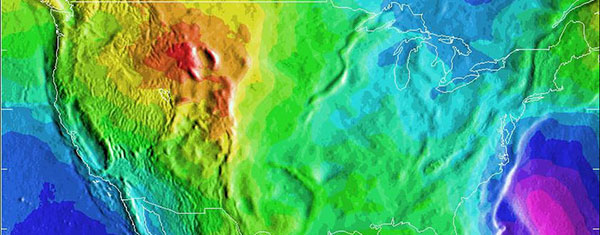
In 2022, NGS will replace the current North American Vertical Datum of 1988 with one that is based on the geoid — a model of global mean sea level that is used to measure precise surface elevations. NGS created and released annual experimental models of the geoid starting in 2014. This year’s models, xGEOID15A and xGeoid15, are now available for public comment on the NGS beta website. The annual experimental models include new data from the Gravity for the Redefinition of the American Vertical Datum project, which has systematically collected airborne gravity data across the nation since 2008. For more information, contact: [email protected]
A depiction of the United States geoid. Areas in yellow and orange have a slightly stronger gravity field as a result of the Rocky Mountains.
While we often think of the earth as a sphere, our planet is actually very bumpy and irregular.
The radius at the equator is larger than at the poles due to the long-term effects of the earth’s rotation. And, at a smaller scale, there is topography—mountains have more mass than a valley and thus the pull of gravity is regionally stronger near mountains.
All of these large and small variations to the size, shape, and mass distribution of the earth cause slight variations in the acceleration of gravity (or the “strength” of gravity’s pull). These variations determine the shape of the planet’s liquid environment.
If one were to remove the tides and currents from the ocean, it would settle onto a smoothly undulating shape (rising where gravity is high, sinking where gravity is low).
This irregular shape is called “the geoid,” a surface which defines zero elevation. Using complex math and gravity readings on land, surveyors extend this imaginary line through the continents. This model is used to measure surface elevations with a high degree of accuracy.
How Does the U.S. National Geodetic Survey Generate a Geoid Model?
Generating geoid models is a fairly complex process and is performed by individuals with expertise in physical geodesy and geophysics. It is too complex of a topic for this newsletter but the following excerpt from an NGS publication by Dan Roman provides a good overview of NGS’ process.
Development of the North American Gravimetric Geoid: Adapting the Process to Determine a Unified Central American Geoid
D.R. Roman National Geodetic Survey, 1315 East-West Highway, Silver Spring, MD, USA, 20910
2 Data & Process Improvements
Techniques discussed here have already been addressed previously in Roman and Smith (2001) and Smith et al. (2001), hence only a summary of the approach discussed in those papers is given here. Essentially, the approach currently under investigations seeks to take advantage of recent and pending gains in various data sets related to the gravity field and significantly reduce approximations considered acceptable in the past.
The first thing to consider is the justification for using a geoid over a quasi-geoid, or more accurately, orthometric heights over normal heights. Convincing arguments have been made for orthometric heights (Holdahl 1984) and normal heights (Heiskanen and Moritz 1967). While orthometric heights require extensive knowledge of the gravity field, it is just that reason that warrants their use. Given the extensive knowledge and available data sets, it is incumbent on governmental agencies to generate such models. With a model of the gravity field from the surface to the geoid at hand, anyone subsequently desiring to transform from orthometric to normal heights need only apply it. However, if normal heights are developed and orthometric heights are later desired, the development of such a model will then be required. Clearly, this is a task best suited to national and international organizations that have access to such data and methods. It should not be left to those researchers desiring to use height models in their studies that may not have access to sufficient resources to accomplish this.
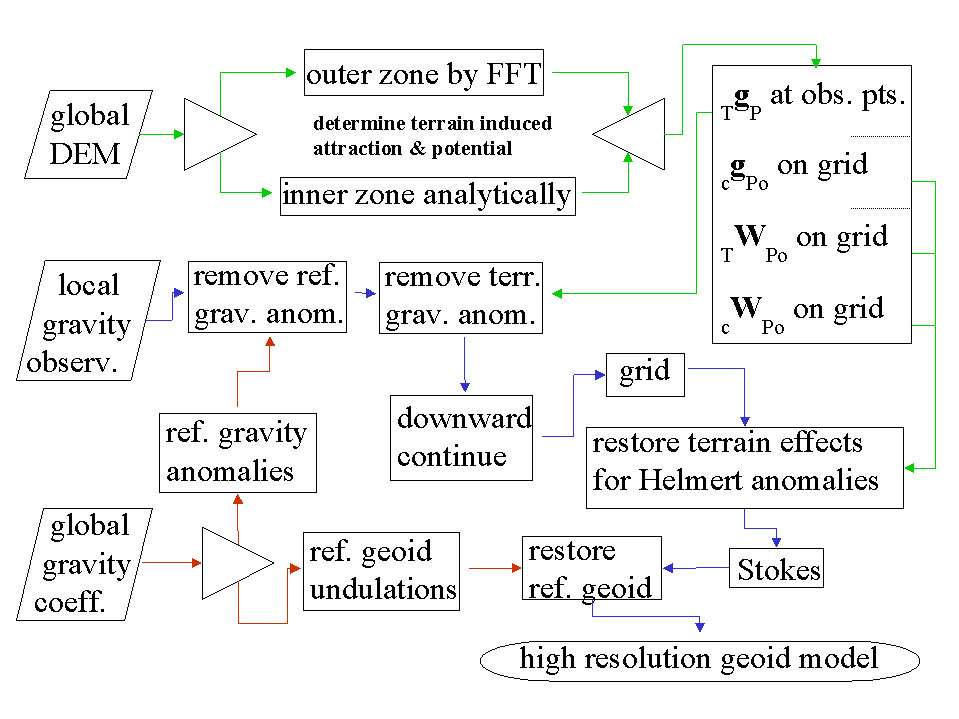
With that understanding then, the development of a gravimetric geoid model follows as a mechanism to readily convert between ellipsoidal and orthometric heights. The method summarized here seeks to break the gravity field into three components and solve them separately. In fact the long wavelength component will be derived from a global reference gravity model. The short wavelength will be determined from the terrain. Both of these components will be removed from available gravity observations, which will then reflect the intermediate wavelength signal. A flowchart depicting the determination of these three signals and the generation of a gravimetric geoid is given in Figure 1. Paths shown in red highlight the use of the reference model, paths in green show the determination of the terrain effects, while paths shown in purple highlight the main path to determining Helmert anomalies and then a gravimetric geoid model.
Fig. 1 Determination of a gravimetric geoid using Helmert anomalies.
The expected accuracy of global gravity models in the near future is expected to vastly improve with commission errors below 1-2 cm at wavelengths of 200-300 km (Tscherning et al. 2000). Use of a remove and restore technique (Bašiæ and Rapp 1992) will then result in significantly reduced errors in the residual signal that will be manipulated.
The approach discussed in Roman and Smith (2001) develops the North American gravimetric geoid by removing the terrain effects, downward continuing the residual values, and then restoring the effects of the condensed terrain to generate Helmert anomalies (Heiskanen and Moritz 1967).
To this end, the gravitational attraction of the terrain (TgP) will be calculated and removed from the gravity observations. It will be split into inner and outer zones to reduce computation times. Smith et al. (2001) showed that the effects of using FFT to determine gravitational attraction and potential for both condensed and 3D masses is negligible beyond about a 4 degree cap radius from the point of interest (P). Inside that zone, DEM’s are employed to capture the spherical relationships between the points and more accurately determine the attraction. With available or pending 1 and 3 arc-second DEM’s (Smith and Roman 2001a, NIMA 2001), the signal that may be determined is limited mainly by the computational facilities available to a researcher.
Additionally, the DEM’s will be used to construct grids for the attraction and potential of the condensed terrain (cgPo and cWPo), as well as the potential of the actual terrain (TWPo), all on the geoid. This will capture the short wavelength gravity signal represented by the terrain to the resolution of the grid generated and facilitate later incorporation of this signal into Helmert anomalies.
The resulting point values should be composed mainly of intermediate features in the gravity field with sources deriving from variations in the Moho depth and lateral density variations. This signal should be sufficiently smooth to reduce errors resulting from downward continuation. It should also sufficiently sample the intermediate field to permit the use of minimum curvature (Smith and Wessel 1990) to generate a grid at the same interval as that of the above terrain effects.
Once these terrain effects are restored, these extremely high resolution grids represent residual Helmert anomalies and may be processed using the Stokes integral to determine a best fitting residual gravimetric geoid. Adding the reference geoid derived from the selected global coefficient model will create an equally high-resolution regional gravimetric geoid model.
For a specific country, GPS-derived ellipsoid heights at leveled bench marks (GPSBM’s) provide control information for generating a hybrid geoid model that can be used to specifically, easily, and accurately transform heights between ellipsoidal and orthometric heights (Smith and Milbert 1999, Smith and Roman 2001b).
What are Hybrid Geoid Models and how are they Generated?
NGS’ hybrid geoid model GEOID12B is computed based on the gravimetric geoid USGG2012. As described above, the gravimetric geoid is computed using the satellite model (GOCO3S), terrestrial gravity data, and the altimetric gravity anomaly over oceans. The heights of USGG2012 represent an equipotential surface relative to the reference ellipsoid. The differences between USGG2012 and the zero height surface of NAVD88 are represented by NAD 83 (2011) GNSS-derived ellipsoid heights on NAVD 88 published benchmarks (GPSBM data). See article by Milbert, D.G., 1998: “Documentation for the GPS Benchmark Data Set of 23-July-98,” IGeS Bulletin N. 8, International Geoid Service, Milan, pp. 29-42.) for a excellent description of NGS’ GPSBM dataset.
Currently, the USGG2012 is fitted to the GPSBM data by using the method of least squares collocation. (See section labeled “Excerpts from NGS’ Geoid 12 Web Page” for specific details on how NGS generated hybrid geoid model GEOID12B.) Areas where there are no GNSS observations on published NAVD 88 benchmarks are filled in by USGG2012 geoid. This means a user will be consistent with NAVD 88 when using GEOID12B to estimate GNSS-derived orthometric heights. Being consistent with NAVD 88 is important but being consistent doesn’t guarantee that your GNSS-derived orthometric heights are accurate. The documentation of GEOID12B states that “The relative accuracy of GEOID12B to NAVD88 is characterized by a misfit of +/-1.7 centimeters nationwide.” However, if a published NAVD 88 height used in the development of the hybrid geoid model isn’t valid, then the model is precise but not accurate. That’s why it is important to ensure the monuments used in hybrid geoid models haven’t moved since their last survey and that their published heights are still valid. We will discuss this in more detail later in this newsletter.
Hybrid geoid model, GEOID12B is computed based on the gravimetric geoid USGG2012 . More specifically, they are computed using the satellite model GOCO3S, terrestrial gravity data, and the altimetric gravity anomaly over oceans. The heights of USGG2012 represent an equipotential surface relative to the reference ellipsoid. The differences between USGG2012 and the zero height surface of NAVD88 are represented by GPSBM data.
Currently, the USGG2012 is fitted to the GPSBM data by using the method of least squares collocation. That implies that the voids or empty areas where there are no GPSBM data are filled in by USGG2012 geoid.
There are over 500,000 leveled marks and 80,000 GPS marks over U.S. territory. Of those, there are only 26,000 GPSBM, with half of them concentrated in 5 states. The data density is uneven and sparse in some states. Lists of GPSBMs can be downloaded from the GEOID12B home page.
The GPSBM data provide the geoid height ‘N’ by differencing the ellipsoidal height ‘h’ from the orthometric height ‘H’:
N = h – H
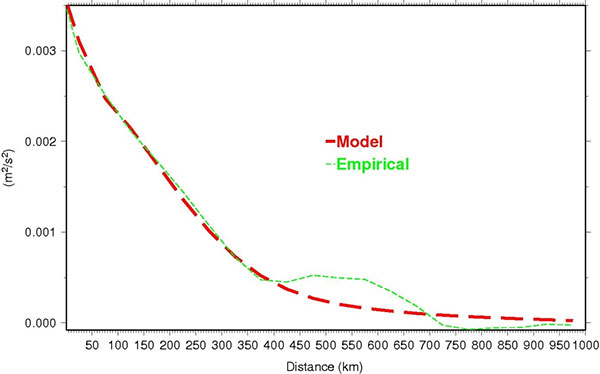
The difference between the geoid height N and that of USGG2012 is computed at every GPSBM. Then, a mathematical model using Least Squares Collocation (LSC) fitting Gaussian functions to describe the behavior seen at the GPSBM is developed. Figure 1 shows empirical data versus the model.
Figure 1: Covariance functions of the geoid differences between USGG2012 and GPSBMs.
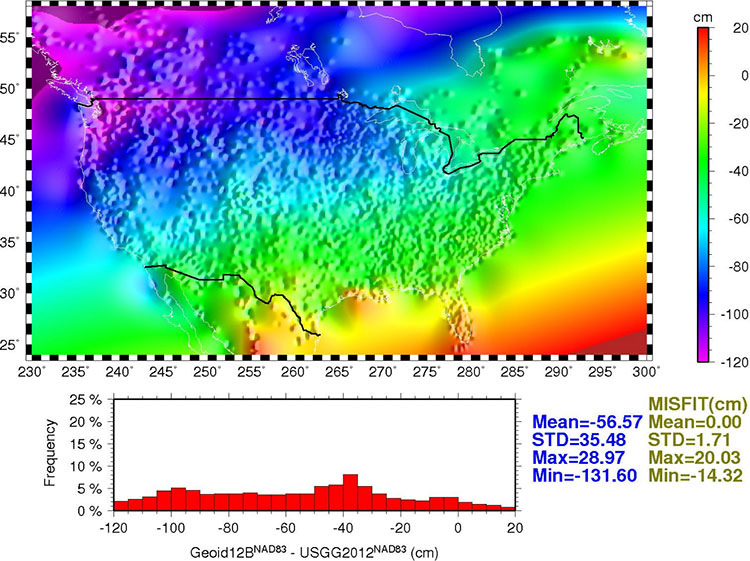
Once the relationship between the points is modeled, the model is used to generate a regular grid for interpolation purposes. Figure 2 shows the final conversion surface. This surface represents the difference between NAVD 88 as a datum and the geopotential (geoid) surface used in the gravimetric geoid and is representative of what the datum transformation surface will be when the new geopotential datum is released in 2022. (Similar to VERTCON, which transforms heights from NGVD29 to NAVD88.)
Figure 2: GEOID12B conversion surface.
Summary and Recommendations
Three hybrid geoid models GEOID12, GEOID12A, and GEOID12B are created. They are very similar, but have distinctive differences in few areas. GEOID12A differs from GEOID12 in that it does not use GPSBM data collected in the southern tier states along Gulf Coast, while GEOID12B differs from GEOID12A only in Puerto Rico.
Data in the database are constantly updated, hence older geoid models do not reflect the newer data. To guarantee data consistency, latest model should be used. At this time, GEOID12 and GEOID12A should be superseded by GEOID12B.
Use data conversion outside the GPSBM data areas with caution. Significant extrapolation errors are expected in areas where there are no GPSBM data.
The relative accuracy of GEOID12B to NAVD88 is characterized by a misfit of +/-1.7 centimeters nationwide.
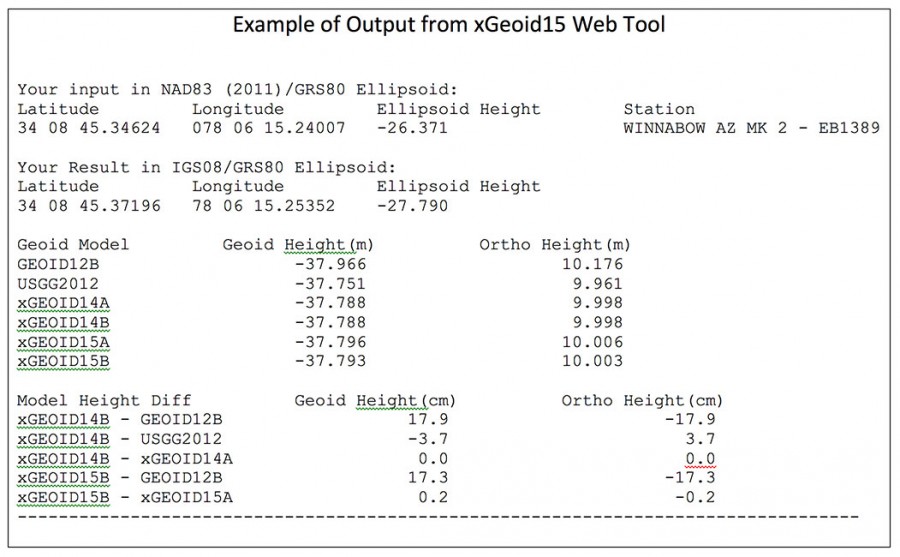
As previously stated, NGS released its latest gravimetric geoid model, xGEOID15. This site will allow the user to compare geoid heights from GEOID12B, USGG2012, xGEOID14 and xGEOID15. (See an example of an input and an output file below.) There are some limited features to this tool. It only provides the results in IGS08 and you are limited to the number of coordinates you can submit at once (20 stations).
Saying that, this tool can be useful for identifying valid NAVD 88 published monuments to be used in the development of future hybrid models. More importantly, it can be used to identify monuments that should NOT be used in future hybrid geoid models or used as constraints in GNSS survey project adjustments.
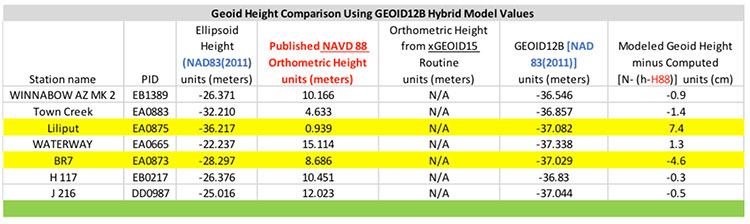
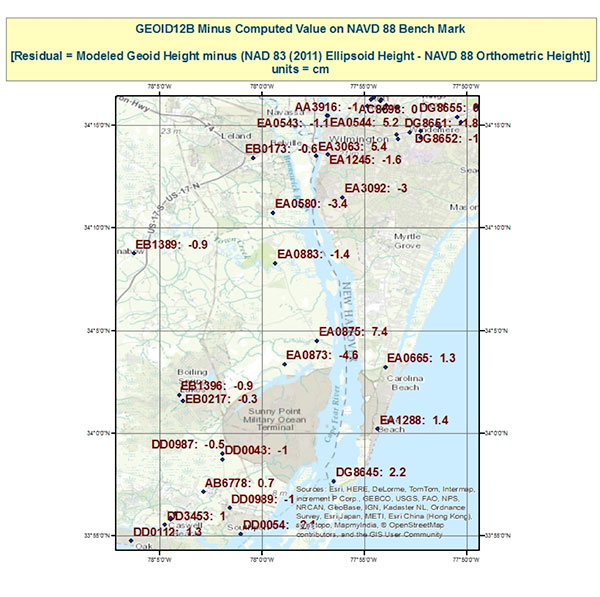
First, let’s look at the hybrid geoid model GEOID12B values compared with computed geoid height values using the equation N (Computed Geoid Height) = [h (NAD 83 (2011) Ellipsoid Height) – H (NAVD 88 Orthometric Height)]. Table 1 lists the differences between the modeled GEOID12B values and the computed geoid height values for a few stations in an area in eastern North Carolina. Figure 1 depicts the stations locations and values. Many of the differences are less than 1.5 cm which is consistent with NGS’ documentation of GEOID12B that states “The relative accuracy of GEOID12B to NAVD88 is characterized by a misfit of +/-1.7 centimeters nationwide.” However, what is important to notice is that two stations have large differences; station LILIPUT’s difference is 7.4 cm and station BR 7’s difference is -4.6 cm (See highlighted rows in table 1 and boxed area on figure 1). This means that the relative difference between stations LILIPUT (EA0875) and BR 7 (EA0873), which are only 3.3 km apart, is 12.0 cm. This is a large difference and may be indicating a large error in the ellipsoid height and/or the orthometric height at station LILIPUT (EA0875) or station BR 7 (EA0873). In the second newsletter we highlighted that stations LILIPUT and BR 7 were only 3.3 km apart but were not simultaneously observed during the same session. Since the relative difference is 12 cm, the ellipsoid heights of these two should be investigated. It should also be noted that the difference between stations BR 7 (EA0873) and TOWN CREEK (EA0883) is only 3.2 cm. This implies that station B 7 (EA0873) is consistent with some of its neighbors. In the second newsletter we noted that stations B 7 (EA0873) and TOWN CREEK (EA0883) were simultaneously observed during the same session. This may be an indication that B 7 is stable relative to its neighbors and that the orthometric and/or the ellipsoid height of station LILIPUT needs to be investigated.
So what does this mean to the user? If the user establishes a GNSS-derived orthometric height near station LILIPUT using GEOID12B, their results will disagree with the published NAVD 88 heights to around 7 cm; if they establish a GNSS-derived orthometric height near station BR 7, they will disagree with published NAVD 88 heights to around –5 cm. This could also mean that the results in a project could really disagree by more than 7 cm if station LILIPUT moved since its last survey. At this moment, we don’t have enough information to determine if the ellipsoid height or the orthometric height is the problem, or which station may have moved since its last survey.
Table 1. Geoid Height Comparison using GEOID12B Hybrid Model Values.Figure 1. Geoid12B minus Computed Value on NAVD 88 Benchmarks.
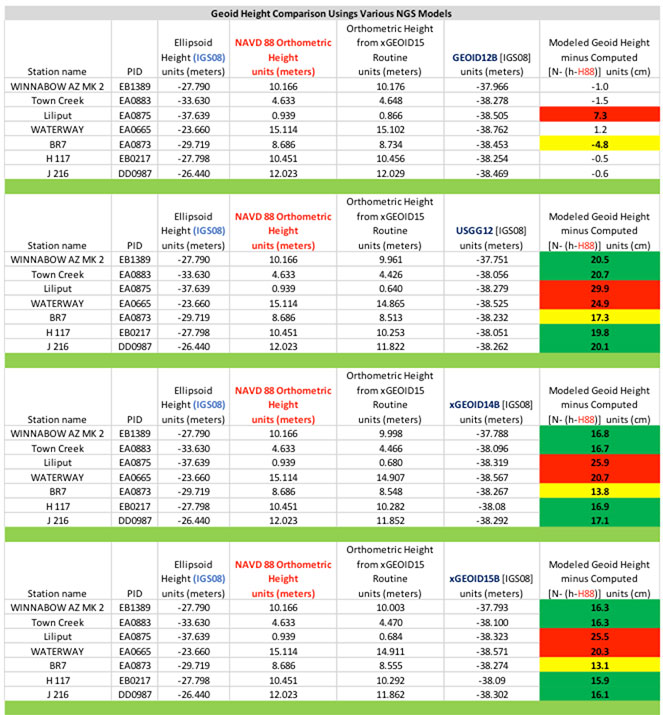
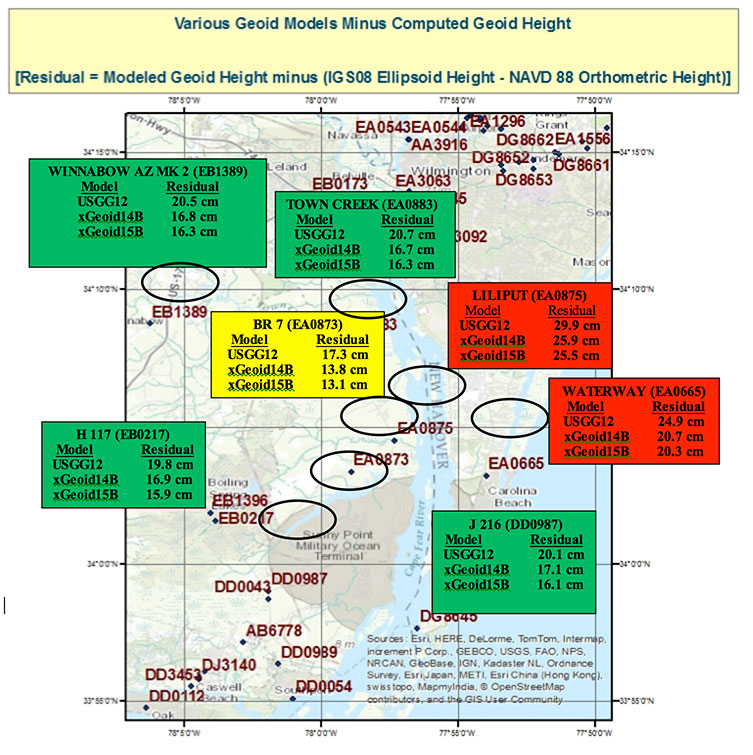
Next, let’s look at the differences using the experimental geoid models which are not distorted to be consistent with the NAVD 88 published heights. There will be a bias and a tilt between the systems but in this small areal extent the tilt should not be significant to our analysis. The bias can be removed by looking at relative differences between stations. Table 2, titled “Geoid Height Values for Various NGS Models using xGeoid15 Web Tool,” provides the modeled geoid height minus the computed geoid height where N (Computed Geoid Height) = [h (IGS08 Ellipsoid Height) – H (NAVD 88 Orthometric Height)]. Figure 2, titled “Various Geoid Models minus Computed Geoid Height,” depicts the differences between the various experimental models and computed geoid heights.
Table 2. Geoid Height Values for Various NGS Models using xGeoid15 Web Tool.Figure 2. Various Geoid Models minus Computed Geoid Height.
What is important to note is that stations LILIPUT (EA0875) and WATERWAY (EA0665) seem to be outliers compared to the other stations in the area of study (red boxes on figure 2); and station B 7 (EA0873) seems to be consistent with its neighbors (yellow box on figure 2). For example, station LILIPUT (EA0875)’s residual using xGeoid15B is 25.5 cm and station BR 7 (EA0873)’s residual using xGeoid15B is 13.1 cm, a relative difference of 12.4 cm. Similarly, station TOWN CREEK (EA0883)’s residual using xGeoid15B is 16.3 cm and station BR 7’s residual is 13.1 cm, a relative difference of only 3.2 cm. In my opinion, station LILIPUT (EA0875) needs to be investigated to determine if it has moved since it was last surveyed. In addition, stations east of LILIPUT (EA0875) such as WATERWAY (EA0665) should also be investigated for an ellipsoid and/or orthometric height issue. As previously mentioned, it is also important to note that station BR7 (EA0873), the box in yellow, appears to be consistent to the 3 cm level with its westerly neighboring stations (the boxes in green). This is important to note because the hybrid geoid model could be significantly difference around stations LILIPUT and BR 7 if station LILIPUT was not used in the development of the hybrid geoid model. I am not suggesting that NGS did anything incorrect by including these stations. The goal of the hybrid geoid model is to be consistent with published NAVD 88 values. Unless there is enough information to determine that a station has moved since the last time it was surveyed, the station should be included in the hybrid model. This is where the user may be able to help NGS. If users would investigate outliers like LILIPUT and BR 7 and provide new GNSS survey data and/or leveling data, NGS may have the appropriate information to determine if the monument should be included in the hybrid model.
Part 2 in this Survey Scene series discussed procedures which need to be followed to detect, reduce, and/or eliminate error sources to estimate accurate GNSS-derived ellipsoid heights. This column, Part 3, discussed why a user should understand the differences between NGS’ scientific gravimetric geoid model and hybrid geoid models, and why it is important to use both types of geoid models in their analysis. It demonstrated how to use these geoid models and ellipsoid heights to identify potential issues with published NAVD 88 heights.
My next newsletter column will focus on analyzing the NAVD88 orthometric heights in this area. It will provide basic procedures for validating NAVD 88 height constraints used to estimate GNSS-derived orthometric heights.
Here it comes right at ya, down the cable into your living room, over the radio waves into the coffee shop or airport and your car: the Internet of Everything (IOE).
The term connotes adding connectivity and intelligence to just about every tech device in use at home, office, or out on the street, to enable special functions, reporting, and command/control. From kitchen appliances to cars, it’s anything with “smart” in front of its name, tied to the Internet and interconnected to tech-ecosystems of software, services, data warehouses, and yet other smart devices, starting but certainly not ending with your phone, watch, tablet or PC.
Most semiconductor companies have fielded new processors aimed at IOE. Broadcom’s new chip, reported in this issue, folds GNSS into the digital cake mix. Market research predicts 220 billion connected devices in use by 2020, and market size in the trillions. Trillions.
The bandwidth to run this new ecosystem is truly staggering. Available spectrum just won’t do it, not in the way we’re using it. Far more precise timing of data packets shot through the cloud will be necessary.
Thus our cover story. GNSS — well, GPS so far — is tightly woven into the fabric of financial and security infrastructure because it furnishes micro- and nanosecond synchronization. Nanos ain’t where it’s at in another eyeblink more. Picoseconds will be the new standard.
GNSS as currently constituted cannot do picoseconds. Another technology or technologies will be required.
This is true on nearly every front, every sector in which GNSS has enabled so much that previously was inconceivable or just plain unconceived. We’re headed further in all those directions, and GNSS can’t get us there alone. Aided and abetted by other positioning, navigation, and timing (PNT) technologies, it can.
The magazine has long covered other PNT technologies, but starting in November you’ll see a whole lot more of this. Every PNT technology, in every issue, in some way. That’s my IOU. Because, after all, it’s a World of Everything.
Pink for a Cure
Our cover logo this month signals that North Coast Media (NCM) is doing something to helpmake a difference. Because October is our company’s largest revenue month each year, our leadership team hascommitted to donate a portion of the company’s October revenues to cancer research. In 2014, NCM donated $8,000to this very worthy cause. The disease has touched the lives of nearly everyone on the NCM team; we’re very excited to be able todo something that matters.
Three weeks ago I attended the National Guard Association of the United States Conference (NGAUS 2015) in Nashville, Tenn. Few people understand that — unlike the U.S. Army and Air Force, which are under direct federal control — each state has its own National Guard organization under the control of the individual state governors. They serve as the state’s local militia responding to disasters and civil unrest as directed by the governor.
The National Guard is also part of the reserve components of the United States Armed Forces, and in that capacity many National Guard units have been called up to serve in overseas operations alongside their active duty counterparts such as in the Mideast. This dual control leads to countless discussions regarding Title 10 or Title 32 funding and jurisdiction.
Additionally, the National Guard is administered by the National Guard Bureau (NGB), which is the communications channel between the states and the departments of the Army and the Air Force. NGB is headquartered in Washington, D.C., and is a joint activity of the Army and Air Force. NGB provides policies, training requirements and, most important, funds for the state units. This makes the NGAUS annual conference much more than a social gathering. It’s an opportunity for the leadership of each state to learn and coordinate, to view new technology and share best practices. It’s also an opportunity to provide official feedback to NGB regarding policies and all-important funding.
Behind-the-Scenes History. A panel discussion I found especially fascinating was the Joint Domestic Operations session. One of the speakers was the former chief of the NGB, retired Lt. General H. Stephen Blum. General Blum was the NGB chief during Katrina, and shared some behind-the-scenes discussions he had with President Bush as Katrina unfolded. We now know that the New Orleans mayor delayed giving the order to evacuate the city, resulting in thousands stranded and hundreds dead. You may remember the photo of more than 100 school buses that went unused and ultimately flooded and unusable. The governor also delayed the order to evacuate, and the request for outside help from other National Guard units and the federal government.
Anxious about the growing disaster, president Bush’s cabinet was pushing him to federalize the National Guard and take charge of the situation. However, General Blum was the single voice against federalization, telling the president that if you seize charge now you will “own the whole problem forever.” Fortunately, the call for help soon came from the Louisiana Governor, and military and National Guard action was almost immediate. General Blum was able to proudly draw the president’s attention to the TV news feed showing the military in action with the under caption “The Cavalry arrives!”
Conference Exhibitors. The NGAUS conference is held in a different state each year. Last year it was in Chicago, and next year it will be in Baltimore. Although this is not a geospatial-centered event, a number of exhibitors and sessions involved geospatial topics, with the following being good examples. I was able to shoot video clips of some of the exhibitors, since seeing technology in action is always more informative than just writing about it.
Esri. For years Esri ArcGIS has been the most common GIS platform used by most states. Several years ago, MajGen William Reddel, Adjutant General of New Hampshire, arranged to consolidate dozens of ArcGIS licenses to one enterprise license for all National Guard units. This greatly simplified GIS software procurement and saved taxpayers thousands.
ForeFlight. For years you may have seen pilots dragging large document cases through the airport. These contained countless paper maps, charts and documents required for the safe navigation of aircraft. Finally, after years of work and the incorporation of digital content that many of you created, the FAA has approved electronic flight bags. See what they look like in this video.
ForceX. ForceX and Z Microsystems have numerous tools to register and incorporate full-motion video and imagery into geospatial environments. See their technology in this video.
Rapid Composites. Rapid Composites builds high-end UAVs for the military and first responders.
As a UAV user myself (DJI Inspire 1), I’m especially interested in the proposed UAV impact tests that will be conducted by the FAA starting in October. Currently, the FAA authorizes the commercial use of drones up to 55 pounds in non-restricted airspace. However, there is a growing concern that a “Sully on the Hudson” incident could severely curtail drone use. The Mississippi State-led Alliance for System Safety of UAS through Research Excellence (ASSURE) will be doing such testing in conjunction with the FAA. ASSURE will test the effect of UAV impact on aircraft windshields, control surfaces and engines.
Knowledge Center. The Knowledge Center has an overarching system that manages assets and personnel for first responders. See their system in operation.
Other exhibitors included Soft Power Solutions LLC, which displayed a geospatial-based personnel and asset management system, and Ball Aerospace, which showed off its new compact real-time 3D collection system that I previously wrote about. The new system has been redesigned to be under 12 pounds and suitable as a payload for many military UAVs.
 Last year on my way home from ION GNSS+, I spotted a bright orange book in the San Francisco airport. The
Last year on my way home from ION GNSS+, I spotted a bright orange book in the San Francisco airport. The