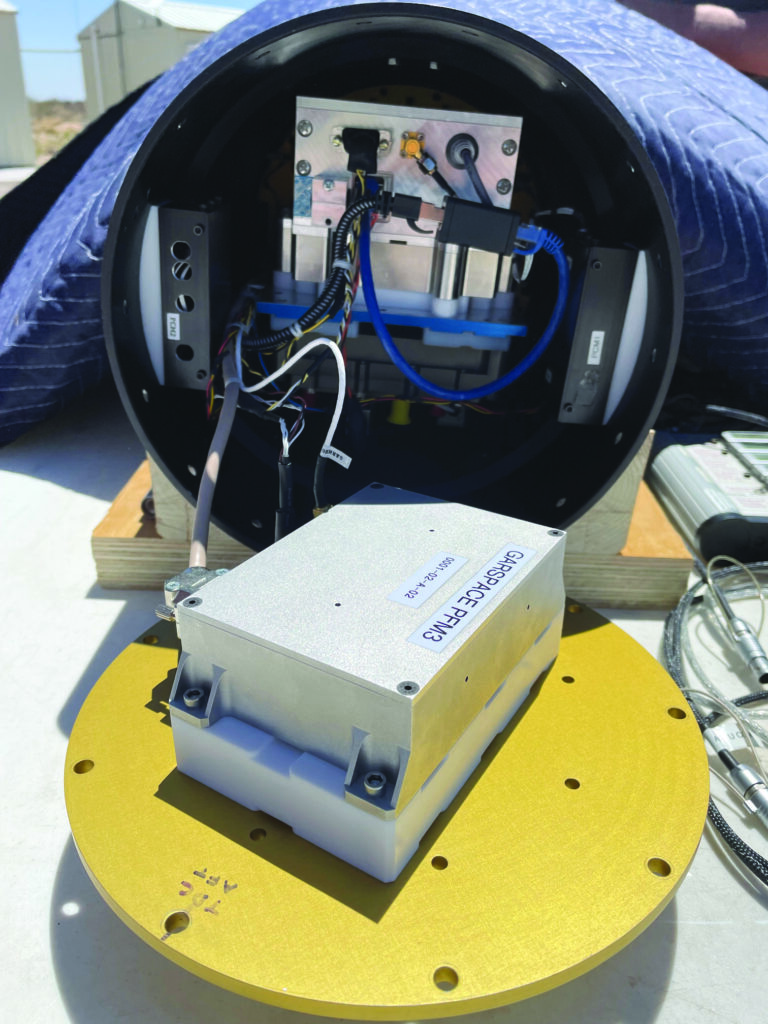
At sunrise on Oct. 1, 2024, SL-15 launched into a perfectly clear blue sky over the desert from Spaceport America, in Las Cruces, New Mexico. The flight — conducted by UP Aerospace with support from NASA’s Flight Opportunities program — carried aloft the payloads and hopes of researchers from three countries — Italy, Germany and the United States — and ten organizations.
Spaceport America, the first commercial spaceport in the world, is an FAA-licensed launch complex. Situated on 18,000 acres adjacent to the U.S. Army White Sands Missile Range in southern New Mexico, it has a rocket-friendly environment of 6,000 square miles of restricted airspace, low population density, a 12,000 ft by 200 ft runway, vertical launch complexes and about 340 days of sunshine and low humidity.
UP Aerospace, a Denver-based company created in 1998, conducted its first suborbital flight from Spaceport America in 2006, which was also the inaugural flight from the spaceport. UP Aerospace maintains a launch complex, a payload processing center and a space propulsion center at the spaceport. Its launch operations and SpaceLoft suborbital launch vehicle were designed and built as a reliable, low-cost Reusable Launch Vehicle (RLV) system.
NASA’s Flight Opportunities program rapidly demonstrates technologies developed by industry, academia, as well as NASA and other government scientists through testing with various commercial flight providers. The program matures capabilities needed for NASA missions and commercial applications while strategically investing in the growth of the U.S. commercial space industry. Available flight platforms include suborbital rockets, rocket-powered landers, aircraft flying parabolic profiles to achieve reduced gravity, high-altitude balloons, and hosted orbital vehicles.
Interoperability test
One of the payloads carried to suborbital heights by the SL-15 rocket was a suite of multi-GNSS receivers from NASA’s Space Communications and Navigation (SCaN) program, the European Space Agency (ESA) / European Space Operations Centre (ESOC), the Italian Space Agency (Agenzia Spaziale Italiana or ASI), and their contractors Fraunhofer (a German, publicly owned research and development organization) and Qascom (a private Italian engineering company offering security solutions in satellite navigation and space cybersecurity). A key goal of the flight test was to determine the scope of the interoperability of these receivers. The full results of the test will be presented at the intercessional meeting of the International Committee on GNSS (ICG), a part of the United Nations Committee for the Peaceful Uses of Outer Space (COPUOS) in Vienna in June 2025.
One of the other payloads on the flight was an experiment by the New Mexico Institute of Mining and Technology — aka New Mexico Tech — on spacecraft health monitoring and real-time systems built by the company Immortal Data, which also tested out and collected environmental data on some of its own equipment as it relates to product development. Another payload was an advanced prototype Automatic Dependent Surveillance-Broadcast (ADS-B) transmitter that could potentially be used for independent, low-cost tracking of space launch vehicles.
Lisa Valencia, an electrical engineer for Overlook Systems Technologies, Inc. and NASA’s SCaN Program at NASA Headquarters, was the program manager for the SCaN payload mission. In November 2019, SL-14 tested NASA’s Autonomous Flight Termination Unit as well as Qascom’s GNSS signal recorder. Oscar Pozzobon, co-founder, president, and CEO of Qascom, was able to post-process the data collected by the recorder. SL-15 was originally planned to launch in November 2022; however, it was scrubbed due to interference between the launch vehicle’s S-band transmitter and the L-band GNSS receiver on board. In May 2023, the original SL-15 booster was used for SL-17, a mission carrying student payloads, which experienced an anomaly, ending the flight test three seconds after launch. Therefore, Valencia, her team, and the other teams involved were elated when the October 2024 launch was successful.
Building on the success of the previous SL-14 launch, the SL-15 mission to fly two GPS-Galileo receivers on a sounding rocket is the result of an agreement between NASA, ASI and ESA. The primary objective was to assess GPS-Galileo performance in a highly dynamic environment. The secondary objective was to have the GNSS receivers integrated with the avionics on board the vehicle, with the aim to test the real time use of PVT available during the flight, in contrast to post processing on SL-14. This allowed the evaluation for operational use of multi-constellation / multi-frequencies GNSS for Autonomous Flight Termination Systems (AFTS). AFTS is an independent launch vehicle subsystem designed for range safety operations. From 2014 to 2019, Valencia was the project manager for AFTS in the Engineering Directorate at NASA’s Kennedy Space Center.
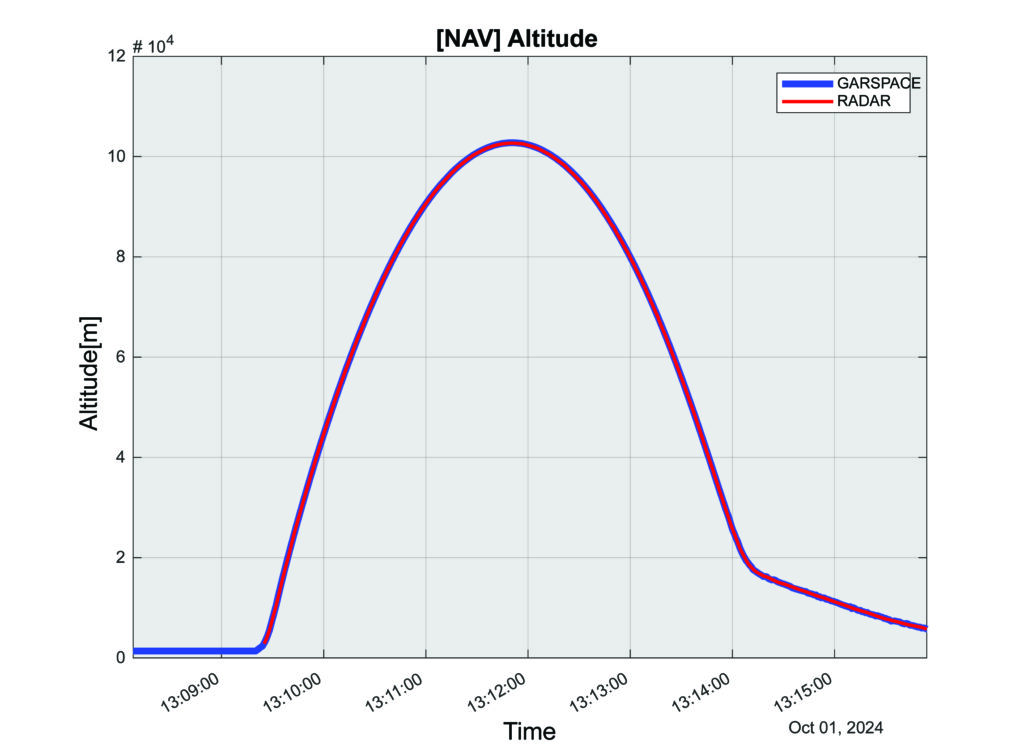
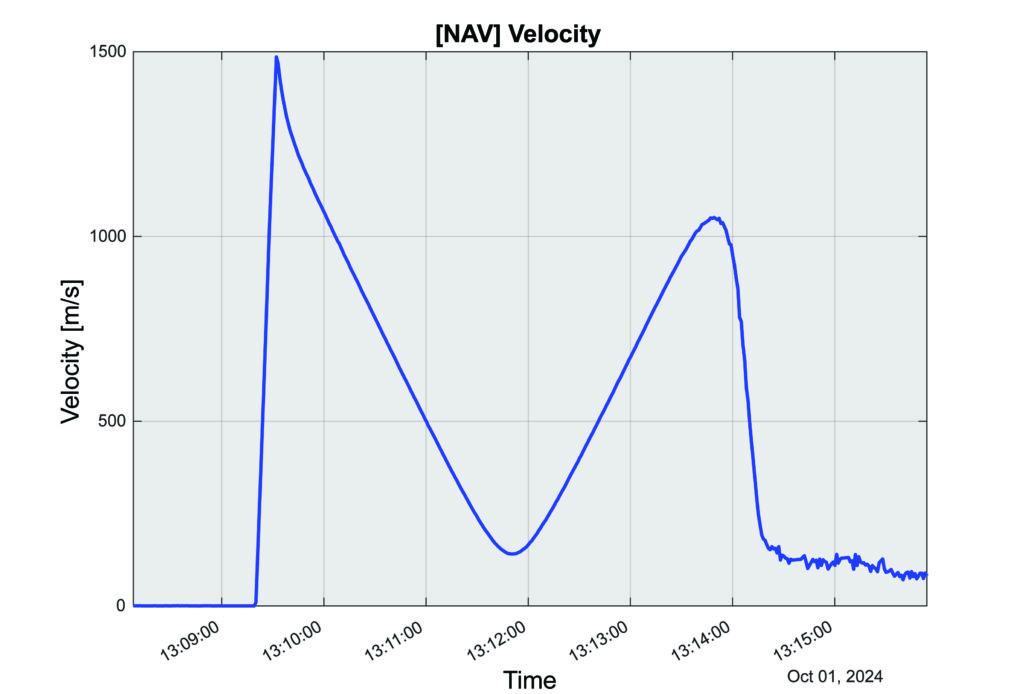
The interoperability experiment on the SL-15 mission included two Autonomous Flight Termination Units (AFTU) and two GPS-Galileo receivers utilizing the L1/E1/L5/E5a signals: a GNSS Dual Frequency / Dual Constellation QN400-SPACE receiver for GPS-GALILEO Receiver for Human Exploration & Operations (GARHEO) program of ASI and Qascom, and a GNSS Receiver with Open Software Interface (GOOSE) receiver from ESA/ESOC and Fraunhofer; as well as a JAVAD GPS L1 receiver. During the flight, a 12-second launch and boost phase was followed by ascent coasting until the rocket reached apogee at an altitude of 115 km, followed by descent, re-entry, and landing, for a total flight duration of 13 minutes. The rocket reached a maximum speed of 1400 m/s, a maximum acceleration of 13.5 G, and a maximum spin rate of 7 Hz.
The NASA sponsor for the GNSS Payload mission is James J. Miller, Executive Director of the National Space-based Positioning, Navigation, and Timing (PNT) Advisory Board with the SCaN Program. The team members are:
NASA: James J. Miller, Lisa Valencia, Hubert Chang, Paul De León, Anh N. Nguyen
ASI:Giancarlo Varacalli, Claudia Facchinetti, Mario Musmeci
During this highly dynamic flight, all GNSS receivers successfully tracked, with high accuracy, based on position, velocity and time (PVT) solutions, meeting the interoperability payload objectives of dual constellation (GPS and Galileo) and dual frequency (L1/E1 and L5/E5a) compatibility.
One plot of the rocket’s altitude changes over time produced from the data collected is striking: a blue line representing the data from the GARHEO and a red one representing data from a monitoring radar on the ground overlap perfectly, resulting in a single purple line on the graph.
During a launch, space vehicles rely on GNSS signals for tracking, monitoring, and safety. Their ability to receive signals from multiple GNSS constellations would offer launch vehicles more precise and reliable real-time PVT information. The SL-15 GNSS experiment demonstrated the benefits of interoperability between Galileo and GPS in highly dynamic environments.
The next step will be a detailed analysis of the data collected during the flight. ESA/ESOC’s next steps will be to process the data from the GOOSE receiver taken on-board and to apply different concepts and algorithms in order to achieve the highest possible accuracy for the SL-15 flight trajectory. Among them will also be a Precise Point Positioning (PPP) GNSS technique that utilizes the GOOSE receiver data in combination with precise orbits and clocks for Galileo and GPS, which will be calculated by ESOC’s Precise Navigation System (EPNS) software. Results are expected in early 2025. ASI/Qascom’s next steps include utilizing the data collected by the SL15 experiment to support the development and validation of the new generation of high dynamics GNSS receivers providing enhanced robustness against GNSS threats. This is the main objective of Qascom’s receiver. At least one launch vehicle is planning to incorporate a multi-GNSS (GPS + Galileo) receiver into their AFTS.
Quotes
“The success of SL-15 is the result of a multi-year collaborative effort with the Italian Space Agency (ASI) and the European Space Agency (ESA) to develop multi-GNSS capabilities to improve resilience for space users. The multi-national SL-15 team worked extremely well together to overcome many challenges, leading to a successful mission. The successful launch of SL-15 was particularly rewarding to our international team in light of the numerous delays we had due to export control restrictions, high winds at the launch site, and key personnel catching COVID-19 during pre-launch checkout. These delays, however, gave us time to resolve payload interference issues identified during one of the launch preparations as well as have our payload reassigned from a rocket with a faulty engine that ended up failing on another mission (SL-17).”
— Lisa Valencia
“The key benefit of this mission was validating our ability to track both GPS & Galileo signals under the highly dynamic conditions of a sounding rocket launch. These included an initial acceleration to 14G (or 14 times the gravitational acceleration on Earth’s surface), a 7 Hz spin rate (seven spins every second), and a maximum speed more than 1400 m/s (3,132 mph).”
— A.J. Ora, Ph.D.
“The integration of GPS+Galileo for high-dynamic space applications will most certainly continue opening up more operational scenarios as GNSS signals become more available and resilient in the sparse and challenging space domain. The use of additional GNSS signals to augment GPS is developing rapidly and is a cornerstone of strengthening international collaboration as called for in Space Policy Directive-7 (SPD-7). NASA is therefore a proud contributor in helping to develop navigation tools that will benefit all space sector users as more knowledge is gained and adopted.”
— James Miller
“UP Aerospace appreciates the opportunity to work with NASA and the vast array of customers they serve. We have partnered in many successful launch campaigns. It can be challenging to integrate so many different payloads into one vehicle, but we are excited at the success of SL-15. Launching rockets is a risky business and sometimes anomalies can occur. The key is to learn from each launch and incorporate the lessons-learned into subsequent flights, ensuring their success.”
Containers, stillages, trailers or reusable transport packaging — non-powered assets such as these play a central role in smooth supply chains and logistics processes. For a long time, however, non-powered assets could hardly be digitized due to a lack of sufficient battery life, thus eluding efficient management.
To plan and control logistical processes and supply chains, companies usually needed a large buffer/reserve stock and sometimes a lot of telephone/administrative work to determine the exact location and condition of such assets. Thanks to power-saving Internet of Things and wireless technology paired with high-performance sensors for environmental conditions and intelligent firmware, sufficiently robust trackers are now available for efficient use in the mass market.
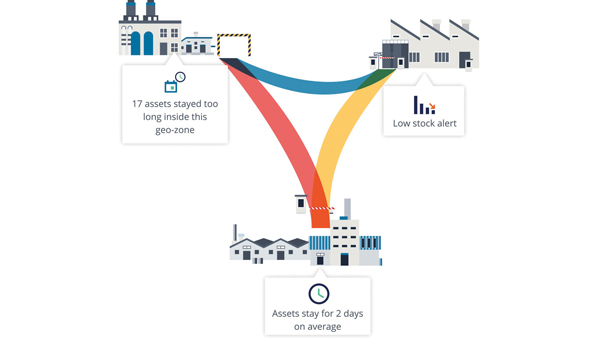
Figure 1: Integrated modeling tools help to model and track the flow of assets across operations and locations.
The basics: Thousands of tracker data at a glance
In order for companies to derive real benefits for their business from pure tracking, they need a management platform that can do more than display the trackers on a map. Depending on the requirements, tracking hardware can be equipped with sensors for temperature, humidity or tipping movements, for example.
A management platform must then ensure that the multitude of trackers can be efficiently commissioned and administered and that their collected data is made available for use. After all, large amounts of data are only valuable if important insights can be gained quickly and intuitively. The tracking application, therefore, needs powerful search and filter functions and visually meaningful maps, dashboards and panels.
Integration into existing systems
However, for the data collected via tracking to fully benefit the company’s supply chains and logistics processes, it needs to be integrated into the company’s existing IT systems, such as ERP systems or tools for data analysis and business intelligence.
The data exchanges between the business applications can be useful in both directions: on the one hand, precise localization and sensor data from the tracking platform enrich reliable enterprise resource planning via the ERP system; on the other hand, it can be helpful to make data from the ERP system available to the tracker management platform — for example, to evaluate the utilization of a trailer or to simply display the contents of a container via a mobile app on-site.
Technically, such data exchange can be realized through open APIs (application programming interfaces), which such a management platform should have. This enables the professional implementation of system integrations that are needed in the business IT of many companies — for example with SAP, Microsoft Azure or AWS.
Designing/modeling process flows and making route patterns transparent
In order for companies to make their own processes around tracked assets transparent, a management platform needs tools that can be used to model and track the flow of assets across the different processes and, if applicable, locations (see Figure 1). Also important for this is the ability to define specific geographic areas of interest. Such geo-zones can then be used for inventory management, flow analysis or alerts. The mapping of load carriers or other assets to companies’ logistical processes and supply chains provides an accurate overview of how individual assets move from location to location, where they stop and for how long.
Based on the collected data, route patterns and travel times can be identified, rotation statistics with average and outlier analyses can be created (see Figure 2), and finally, planning and forecasts can be adjusted based on measured historical data. For appropriate visualization and evaluation, the tracking platform should provide the appropriate tools. This way, statistics can be generated for thousands of assets and/or an entire fleet, which can serve as a basis for further process optimization.
Figure 2: With a high-performance tracker management system, route patterns and travel times can be detected, and rotation statistics can be generated so that averages and anomalies can be identified.
Airbus example
Airbus develops, manufactures and delivers aerospace products, services and solutions worldwide, with more than 50,000 dedicated returnable transport packages circulating between sites and subcontractors. Thousands of returnable transport packages have been equipped with trackers and managed via a cloud-based platform over the past years. Airbus therefore benefits today from complete transparency. Inventory runs automatically, and stocks can be easily retrieved with their locations. The rotation capability of the packages has been improved, while their storage times and the circulating stocks have been reduced. Fleet capacity can also now be optimized, spare parts costs saved and subcontractor compliance better monitored.
The advantages at a glance
Precise inventory management of all mobile assets, from containers to returnable transport packaging to construction machinery.
Reliable condition monitoring: Continuous monitoring of environmental conditions such as temperature and humidity creates transparency — e.g., for compliance agreements.
Optimal process flows: Route patterns and turnaround times become transparent and anomalies easily identifiable, so that warnings can be sent in time and processes optimized overall.
Utilization monitoring: The utilization of each load carrier and each asset in a fleet can be precisely determined and optimized.
Predictive maintenance: Thanks to continuous monitoring, the maintenance of monitored assets can be planned and carried out in advance — before a breakdown interrupts important business processes.
Protection against theft: Lost or stolen assets can be easily recovered, so that financial damage can be minimized, especially in the case of expensive specialized assets.
Well, it’s January 2025 and it’s almost here — that is, the release of the beta version of the new, modernized National Spatial Reference System (NSRS) – NATRF2022, PATRF2022, CATRF2022, MATRF2022 and NAPGD2022.
This newsletter will highlight some activities associated with the new NSRS. That said, this is short notice, but I would like to highlight that there is a webinar and workshop that will address the new NSRS scheduled for Jan. 9, 2025 — TRB workshop, “Navigating the Modernized National Spatial Reference System: A Geospatial Odyssey” and NGS webinar “Updates to Products and Models within the North American-Pacific Geopotential Datum of 2022.” I will provide more details on this later in the newsletter.
The modernization of the NSRS is scheduled to occur in 2025 or 2026. NGS intends to release associated tools and services within five years of the modernization. The following details from the Federal Register outline the process for the rollout of the modernized NSRS:
NGS plans to roll out components of the modernized NSRS in 2025 or 2026. As each component is released at beta.ngs.noaa.gov, it can be publicly tested with feedback provided to NGS. The testing will continue for at least six months after the final component is released on beta.ngs.noaa.gov.
Once testing is complete and all modernized NSRS components appear to be stable and correct, the Federal Geodetic Control Subcommittee (FGCS) will be asked to vote to approve the modernized NSRS (likely in 2026). If FGCS approves the modernized NSRS, NGS will publish an FRN announcing the approval of the modernized NSRS and begin a several-month process of transitioning all modernized NSRS components to the official website at geodesy.noaa.gov. During this transition, the beta website may be wiped of submitted data and no further submissions to the NGS IDB (the repository for the current NSRS) will be allowed.
Excerpt from Federal Register Notice. (Photo: Federal Register website)
What does “Only one major improvement to the current NSRS is expected during this time: ITRF2020 will be integrated in all products and services” mean? I understand that one product that ITRF 2020 will be integrated into is the NOAA CORS Network (NCN). The CORS coordinates and velocities will be updated with ITRF 2020 values. That said, NGS datasheets will still provide coordinates in NAD 83 (2011), epoch 2010.0.
As I’ve mentioned in previous newsletters, time really is running out and users need to obtain a working knowledge of the new, modernized National Spatial Reference System. For those attending the104th TRB Annual Meeting on Jan. 5-9, 2025, in Washington, D.C., there is a scheduled workshop on the modernized NSRS. The workshop is sponsored by TRB Geospatial Data Acquisition Technologies Committee (AKD70). The workshop, titled “Navigating the Modernized National Spatial Reference System: A Geospatial Odyssey,” will be held on Thursday, Jan. 9, 2025, from 9:00 am to noon, in room 202B in the Convention Center in Washington, D.C.
Thurs., Jan. 9, 2025 9:00 am to 12:00 pm Room 202B, Convention Center Washington, D.C.
This workshop will cover the following topics:
Why the NSRS is being updated
The key goals of the modernization effort
Timeline, standards and technology considerations
The Geospatial Data Act of 2018 and its impact
There will be a discussion about the replacement of the North American Datum of 1983 and vertical datums and implications for existing workflows
There will also be a discussion about use cases and practical scenarios, how to transition and how to leverage new technology and tools.
For those interested in more information on the TRB AKD70 committee, my August 2024 GPS World Newsletter highlighted activities associated with the Transportation Research Board’s ADK70 Standing Committee on Geospatial Data Acquisition Technologies.
Since the new NSRS will be introduced this year, it is time for users of the NSRS to get familiar with the NOAA Technical Memorandum NOS NGS 92 document titled “Classifications, Standards and Specifications for GNSS Geodetic Control Surveys using OPUS Projects” written by Dave Zenk and Dan Gillins, Ph.D., National Geodetic Survey, published on Oct. 23, 2024. This document provides the specifications users must adhere to when submitting GNSS projects to NGS for review and publication.
Photo: NGS website
The section below explains the purpose of the document. There are a few items that I have highlighted in the preface that users should be aware of:
The document replaces NOAA Technical Memorandum NOS NGS 58 and NOAA Technical Memorandum NOS NGS 59
Users will need to follow these specifications for all projects that will be submitted to NGS using OPUS Projects for review and publication
This publication supplements Standards and Specifications for Geodetic Control Networks issued in September 1984 (Bossler 1984).
This publication replaces NOAA Technical Memorandum NOS NGS 58 Guidelines for Establishing GPS-Derived Ellipsoid Heights (Standards: 2 cm and 5 cm), Version 4.3 (Zilkoski et al. 1997) and also replaces NOAA Technical Memorandum NOS NGS 59 Guidelines for Establishing GPS-Derived Orthometric Heights (Zilkoski et al. 2008).
This publication provides classification, standards, and specifications for GNSS geodetic control surveys that use Global Navigation Satellite Systems (GNSS), which will be submitted to NGS using OPUS Projects for review and publication. These types of surveys were not well-established by the dates of the 1984, 1997, and 2008 publications, nor did OPUS Projects exist. In addition, since 2008 GNSS technology has improved and considerable research has been done into the best practices regarding these surveys and the analyses of achievable results (e.g., Allahyari et al. 2018; El Shouny and Miky 2019; Gillins and Eddy 2015, 2017; Gillins et al. 2019a; Gillins et al. 2019b; Jamieson and Gillins 2018; Park et al. 2018; Schenewerk et al. 2016; Soler and Wang 2016; Wang and Soler 2013; Wang et al. 2017; Weaver et al. 2018). That research supports this publication.
This publication is specifically limited to supporting OPUS Projects (version 5.x), the current North American Datum of 1983 (NAD 83), the North American Vertical Datum of 1988 (NAVD 88) and other current vertical datums that are officially recognized by NGS. Future versions of OPUS Projects and future datums will require revision of this publication.
I highlighted some important sections of the April 2023 webinar in my May 2023 newsletter. Future newsletters will address the specifications in more detail, but I would encourage readers to download the NGS 92 document and the April 13 webinar and slides.
On Dec. 18, 2024, NGS sent an email to individuals on NGS’s listserv informing them that they have made several updates to the NAPGD2022 products and that these updates are now available on the NGS alpha site.
NGS Dec. 18 newsletter. (Photo: NGS website)
To explain the product updates, NGS has scheduled a webinar for Jan. 9, 2025, to discuss the North American-Pacific Geopotential Datum of 2022 (NAPGD2022).
As previously stated in my newsletters, users should obtain a working knowledge of the new, modernized National Spatial Reference System. NGS publicly given presentations that have been collected for public viewing can be downloaded here.
I would like to wish everyone a Happy New Year and a year filled with exciting opportunities.
As we approach the holidays and if I get tired of writing about weighty scientific, technical and policy issues, I might apply for a copywriting position at Hallmark Cards. But for now we begin to think concretely about the coming year. In fact, due to our production timelines, as you are reading this issue we are busy completing the January one. So, what can you expect to see in these pages in 2025?
First, more of the same… excellent content. Our cover stories will continue to bring you case studies from key GNSS application areas based on interviews with equipment manufacturers and end users. Our secondary features will cover bathymetric surveying; GNSS/PNT applications for consumers, science and business; autonomous vehicles; and indoor mapping. Our System of Systems section will continue to keep you informed about developments in GNSS, other PNT, and space exploration around the world. Our guest columnists — including Lisa Dyer of the GPS Innovation Alliance and Dana Goward of the Resilient Navigation and Timing Foundation — will continue to bring you their valuable perspectives. Our annual Directions section will continue to provide updates on all four GNSS and the regional constellations.
Launchpad will continue to showcase the latest product releases and Market Watch will continue to bring you a roundup of timely industry news. Our buyers guides will continue to provide a handy reference to who makes what. Our Mapping Marvel, Research Roundup and Seen & Heard sections will continue to bring you beautiful and interesting maps, summaries of scholarly articles, and glimpses of interesting and amusing GNSS/PNT applications around the world, respectively.
Our Authoritative Reference section will feature an article on the GPS budget, an update to “Who Runs GPS?” (see the February 2023 issue), an almanac of GNSS satellites and signals, and a survey of augmentation and corrections services. Our Inside the Box occasional section will explain the workings of different aspects of GNSS/PNT technology.
Following Richard Langley’s fantastic 35-year run with his great Innovation column — if you missed it, see his last one, and a celebration of his work, in the November issue — the February issue will launch a new quarterly technical column and its editor (and, sometimes, author). Many of you will start guessing who this person is and the new column’s name… but my lips are sealed until then.
I will engage our Editorial Advisory Board in more in-depth discussions of technical and policy issues and ask some of its members to write full articles. I will expand our coverage of low-Earth orbit (LEO) PNT and corrections services and introduce new content categories — such as legal issues, the consumer market and book reviews.
I am looking for new authors, including a Washington correspondent, to report on relevant budget negotiations, legislation and policy discussions; a surveyor to report from the field about new equipment, techniques and challenges; a technology writer to cover the growth in LEO PNT constellations and other types of complementary PNT and one to cover developments in the consumer market.
Unmanned surface vessels (USVs) are becoming a reality for many sea-going countries around the world. Belgium and The Netherlands have partnered to acquire a proven autonomous mine-clearing solution supplied by Exail Technologies in Paris, France.
A nearly $60 million contract awarded in July 2024 by NATO will allow Exail to deliver several hundred K-STER underwater vessels, which can find and destroy both floating and anchored mines.
Equipped with a shaped charge, the unmanned underwater vehicle (UUV) is launched from a safe distance by a minesweeping ship, currently undergoing sea trials – the Oostende new generation minesweeper. Similar to the Kamikaze aerial drone, it autonomously seeks out a mine at a predetermined location and destroys it.
K-STER UUV encounters. (Photo: Exail)
Meanwhile, as the war in Ukraine continues, drone warfare continues to evolve. Ukraine has developed electronic warfare systems that have progressed from merely jamming control signals and GNSS navigation to actually spoofing GNSS guidance. These systems overcome direct satellite signals with a stronger signal, providing gradually changing guidance to the drone, ultimately steering it back toward Russian-friendly Belarus.
Several recent intense Russian drone attacks were with tens — and even hundreds — of Iranian Shahed attack dones. 151 were spotted in November alone, 148 of which were Shahid drones that carry an 88 lb explosive warhead. On November 26, the Ukrainian Air Force reported that Russia attacked with 188 Shahed drones along with a few Iskander-M ballistic missiles. Ukraine responded with aircraft, helicopters, shells fired from fixed ground installations, and signals designed to jam drone electronics and guidance systems. Around 80 attacking drones succumbed to these Ukrainian defenses.
In addition, electronic GNSS spoofing of more than 90 drones diverted them from their targets – this implies a widespread array of electronic resources that intercepted in-flight drones coming from Russia. Diverted from their planned tracks to their targets, these drones will crash when they eventually run out of fuel. In a large number of cases, the ground defense systems were able to steer the attackers toward Russian-friendly Belarus, where they also crashed when fuel was exhausted. So perhaps less than 50% of this specific attack resulted in the use of precious Ukrainian ordinance, a good sign for future defense capabilities.
Meanwhile, on the other side of the “Pond” (Atlantic Ocean), British and U.S. forces at bases in Southern England have been dealing with an uninvited invasion of overflying drones, somewhat similar to reported incursions over airforce bases (AFB) in the U.S., such as Langley AFB.
RAF Lakenheath is a joint UK/US base used by the US 48th Fighter Wing and is thought to also house NATO’s nuclear weapons – this base is one of four that is thought to have been harassed by drone overflights. Other UK bases which now also have heightened security include RAF Lakenheath, RAF Mildenhall, and RAF Feltwell in the Southeast and RAF Fairford in Southwest England. We might speculate that the drones could be collecting Video and maybe Lidar information on assets on the ground, but surely this has already been gained by spy satellites belonging to Russia and China, the principal suspects for these incursions — so what exactly could be the intent?
The incursions were happening at the same time that Ukraine was using UK Storm Shadow missiles against Russia. Some speculate that this might be a demonstration of capability by Russia, indicating an ability to quickly, without any opposition, gather a number of drones and fly them over UK NATO bases. Whilst unarmed for this demonstration, in the future, they could wreak havoc on aircraft and personnel. A number of criminal investigations are apparently underway to determine who was responsible.
My previous newsletter highlighted the Fall HSRP meeting that discussed how The Ohio State University and Michigan State University have made great progress in developing useful tools for the development and implementation of the new, modernized National Spatial Reference System (NSRS) in 2025. This newsletter will highlight the updates to vertical datums that The National Oceanic and Atmospheric Administration (NOAA) is working on.
Below is an excerpt of the agenda for the material that I will highlight in this newsletter. As I mentioned in my last newsletter, the HSRP website provides links to reference documents, presentations and recordings. I would encourage everyone to download the presentations or listen to the recordings to obtain all the details.
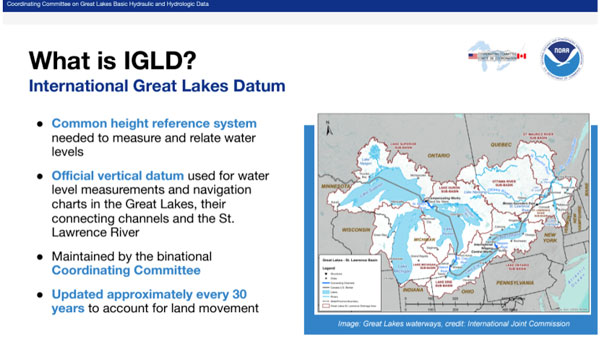
This newsletter will highlight the session on the vertical datums, including the International Great Lakes Datum (IGLD).
NGS has created a website that provides brief explanations with additional links for detailed information on the National Tidal Datum Epoch (NTDE), International Great Lakes Datum (IGLD) and Gravity for the Redefinition of the Vertical Datum (GRAV-D). The site highlights that NOAA is currently working on three major updates to vertical datums: the 1983-2001 NTDE, the International Great Lakes Datum of 1985 (IGLD 85), and the North American Vertical Datum of 1988 (NAVD 88). The site provides information on why the datums need to be updated.
Excerpt from NTDE. (Photo: NOS website)
The box titled “Excerpt from NTDE“ provides information about the NTDE. It explains what the NTDE is, what NOS is doing, and why the NTDE needs to be updated. If you click on the link titled “National Tidal Datum Epoch update” on the right side of the webpage, it provides more information and links about the NTDE update, such as how will the NTDE update impact you.
The National Tidal Datum Epoch (NTDE) is a 19-year time period established by the National Ocean Service for collecting observations on water levels and calculating tidal datum values (e.g. mean sea level, mean lower low water). The NTDE needs to be regularly revised to account for long-term effects of land movement, sea level rise, and changes in tidal constituents. Tidal datums and their data are used to generate products and services necessary for safe navigation, coastal hazard mitigation, ecosystem research, coastal engineering and marine boundary demarcations.
The NTDE Update: New Tidal Datums are Coming!
NOAA currently utilizes the 1983-2001 National Tidal Datum Epoch. This epoch is now undergoing revision and will be replaced by the fifth iteration of the NTDE. Measurements for the update will be based on water level data spanning the years 2002-2020. Once all data has been collected, NOAA will review, analyze, and generate revised datums. The current proposed release date for new NTDE products is after 2026.
The website also highlights two other NOS projects – the International Great Lakes Datum and the Gravity for the Redefinition of the Vertical Datum (GRAV-D). Again, if you click the “International Great Lakes Datum update” link on the right side of the webpage, it provides more information and links about the IGLD update such as how will the IGLD update impact you. Clicking the “Gravity for the Redefinition of the Vertical Datum” link on the right side of the webpage provides some more information and links about vertical datums.
Photo: MOS website Photo: NOS website
On the second day of the meeting, Jacob Heck, NOAA National Geodetic Survey (NGS), and Sierra Davis, NOAA Center for Operational Oceanographic Products & Services (CO-OPS), gave a presentation providing details on the update to the International Great Lakes Datums of 1985 (IGLD 85). The presentation addressed the following topics:
Define IGLD
Significance of the Great Lakes and need for a common water level datum
Binational coordination and mandates
Why IGLD needs to be updated
Updating the datum
Crucial observational infrastructure
Differences in IGLD (1985) and IGLD (2020)
Future of accessing the datum
Status of IGLD (2020) development
Project milestones to roll-out
Unresolved questions: low water datum
Outreach efforts underway
I have provided a few slides highlighting parts of the presentation. Again, the HSRP website provides links to reference documents, presentations, and recordings. I would encourage everyone to download the presentation or listen to the recording to obtain all the details. The presentation of the IGLD starts at 1:34:00 on the recording.
Photo: HSRP website
They explained the importance of the requirement for the coordination of water levels on the Great Lakes between Canada and the United States and the reason for establishing an international datum.
Photo: HSRP website
Due to land deformation, the IGLD is periodically updated, typically every 25 to 30 years. That is, an uplift in the northern region and subsidence in the southern region of the Great Lakes. See the box titled “Land Deformation in the Great Lakes.”
Land deformation in the Great Lakes. (Photo: HSRP website)
The IGLD was updated in 1955 and then again in 1985. This update is overdue by a few years. That said, it will be aligned with the new modernized NSRS and allow for more seamless updates in the future.
Photo: HSRP website
The presentation highlighted that the expected changes between the old datum, IGLD 85, and the new datum (IGLD 2020) will range from 30 cm to 65 cm.
Photo: HSRP website
The IGLD community measures hydraulic heads for water management using dynamic heights, not orthometric heights. The presentation explained why IGLD uses dynamic heights and how GNSS technology will be used to estimate IGLD dynamic heights.
The IGLD team have been working on getting the message out to the user community. The September 2024 HSRP presentation is just one example. Here’s a summary of the recent and future outreach activities:
Recent engagements:
All-Interested Congressional briefing (May 2024)
Canadian Hydrographic Conference (May 2024)
Canadian Geophysical Union Conference (May 2024)
IAGLR (May 2024)
Soo Locks Engineers Day (June 2024)
Michigan Sea Grant briefing (Jan 2024)
Illinois Coastal Management Program briefing (Sept 2024)
Upcoming:
Coordinating Committee’s ESG (TBD)
Boards of Control (Spring 2025)
2024 Great Lakes Conference, Chicago, IL
US Hydro 2025, Wilmington, NC
IAGLR 2025
The slide titled “Key Takeaways” summarized the essence of their presentation.
This newsletter highlighted NOS’s Tail of Three Datum website. The website provides brief explanations with additional links for detailed information on the National Tidal Datum Epoch (NTDE), International Great Lakes Datum (IGLD), and Gravity for the Redefinition of the Vertical Datum (GRAV-D). The site highlights that NOAA is currently working on updating the 1983-2001 NTDE, IGLD 85, and North American Vertical Datum of 1988 (NAVD 88). The newsletter also discussed the presentation on the International Great Lakes Datum (IGLD) 2020 that was given at the 2024 Fall HSRP meeting. Again, the HSRP website provides links to reference documents, presentations, and recordings. I would encourage everyone to download the presentations or listen to the recordings to obtain all the details.
The November 2024 issue of GPS World features Professor Richard Langley’s 300th and final “Innovation” column. His first one appeared in the January/February 1990 issue, the magazine’s very first. In celebration of Richard’s decades-long contribution to GPS / GNSS / PNT, we are publishing a selection of testimonials and photos (below) from some of his colleagues and friends, gathered by his former students Sunil Bisnath and Attila Komjathy.
Recollection from 1990, Trinidad – University of the West Indies
It was 1990, late into a — thankfully warm — night in Trinidad. I still remember that moment vividly — the sense of anticipation mixed with skepticism. A small group of us, undergraduates from the Land Surveying Department at the University of the West Indies, were standing outside in the middle of the night. We were waiting, eyes fixed on the sky, holding our breath for signals that were promised to come — signals that the foreign professor, Richard Langley, assured us would soon appear and change our lives forever. Back then, GPS satellites were in scarce supply. Only a few were up there, and getting a signal was not guaranteed. Richard’s confidence, however, was unwavering. He was convinced that this technology — this new way of understanding our position in the world — would revolutionize everything we knew about land surveying and navigation. That year was my last in Trinidad. I left with memories of those nights under the stars, waiting for those elusive signals that did eventually come. Over time, I’ve met Richard at numerous Institute of Navigation events, and like the GNSS constellations, we have continued to grow and evolve yet remain united by our passion for a technology that continues to grow beyond our wildest expectations. – Professor Allison Kealy, FRIN, GAICD Director, Innovative Planet Research Institute Professor, Civil Engineering Swinburne University of Technology
I was introduced to Richard more than 15 years ago. I learned quickly that he is not only a man of renown earned by his overarching knowledge on almost all aspects of satellite navigation, but also a man of action. Not surprisingly and probably well known, he was one of the first researchers investigating and improving the Precise Point Positing (PPP) technique. It is less well known that he was also an early adopter of the PPPPP concept. When asked what the abbreviation stands for, Richard would answer with a twinkle in his eye: “Proper preparation prevents poor performance!” I had the honor of seeing Richard in action during a joint measurement campaign where we applied both concepts. We wanted to collect observations of the new Galileo test satellites GIOVE-A and -B to use them for precise positioning. It happened that they had favorable visibility during the ION GNSS conference in Savannah, Georgia, in September 2009. So, we mounted a bunch of equipment onto Richard’s rental car and off we went through the streets, after carefully making sure that the GIOVE satellite were actually visibile and reference product generation back home in Munich, Germany, and New Brunswick, Canada, was properly working. Richard was steering the automobile in rapid turns on the parking lot to get some serious phase wind-up effect going. I was so concentrated on the data logging that I did not even feel the urge to throw up. The measurement collection went well and the data ended up being used for a joint publication the following year, potentially one of the first papers jointly using GPS and GIOVE. PPP using the PPPPP rule — there you go! – André Hauschild, Ph.D., Researcher German Aerospace Center (DLR)
I first knew of Richard Langley through his Innovation column in GPS World. It was largely through this column that I acquired my basic knowledge of GPS. The columns were always so clear and so well written. It was a time of rapid change — the Internet, rapid data transfer between sites, and many, many other challenges. I received a grant to fund the Westford Water Vapor Campaign, and along with Arthur Niell of Haystack Observatory, we set out borrowing as many receivers, radiometers, and radiosondes as we could. Thus began my first “international” phone call to Richard Langley (the University of New Brunswick is, of course, in a foreign country) asking him to borrow receivers. Richard, perhaps because he did his postdoc here at MIT, and spent many hours out at Haystack, was more than amenable. He not only lent us three receivers but also a foreign visitor, Pieter Toor from Delft, and Virgilio Mendes, one of his graduate students. From them I learned immeasurably about the troposphere and water vapor distribution. The Westford Water Vapor Experiment was an important series of measurements, that helped us realize the potential of GPS before it was fully recognized by the community. Later, I was invited to join Jack Klobuchar and the Canadian equivalent of the FAA to fly to the University of New Brunswick, where I met Attila Komjathy for the first time. Later I also came to know Sunil Bisnath. Richard Langley trained a remarkable set of students, many (if not most) of whom have gone on to stellar careers. – Anthea J. Coster, Ph.D., Assistant Director; Principal Research Scientist MIT Haystack Observatory
Professor Richard Langley is truly one of the masters of the GNSS community. He has been the mainstay of knowledge, scholarly activity, and mentoring to scholars and students for decades. His friendly demeanor and wiliness to help out wherever he can, makes him a pleasure to talk to and collaborate with. I look forward to seeing Richard at ION technical conferences with that big smile on his face and observing his love for and devotion to the art and science of navigation. – Professor Chris G. Bartone, Ohio University
Richard and I are of the same “vintage” (date/time: referring to the period when we ramped up our work and study activity) and “terroir” (space/environment: referring to discipline background, circumstances and opportunities). We were both educated as surveyors, we both became academics, and we both mastered the arcane applied science field of geodesy. Geodesy in the 1970-1980s was undergoing a revolution driven by advances of the Space Age, reflected in the increasing use of Earth-orbiting satellites for precise positioning, mapping, gravity field determination, sea surface mapping, and much more. Richard and I are of the generation of geodesists in the 1980s that recognized — before any other engineering or science discipline — that GPS was going to change our world in profound ways. We pioneered its use for geodetic surveying (at the sub-cm accuracy level) even before GPS was declared “fully operational” in the mid-1990s. We had more than a decade head-start in understanding the principles of differential GPS, of carrier phase-based static positioning, and of the system itself. It is a head-start that continues to this day. We developed the first university GPS courses, wrote the first textbooks, educated the first generation of GPS scientists, developed the first measurement processing software, and helped revolutionize the practice of navigation. Although GNSS is considered the most important geoscientific technology that we use today, precise GNSS-enabled positioning has impacted so many other professional, scientific and social applications. With the founding of GPS World’s “Innovation” column, Richard launched an amazing educational and industry outreach service. Those articles tracked the advances in GPS/GNSS technology and applications. While there are still some of our geodesy generation making contributions to their discipline, Richard has continued to promote GNSS for 35 years in a unique way, through his careful curation of “Innovation” column articles. They remain a joy to read. Richard, keep up this great service to the positioning, navigation and timing (PNT) community. – Professor Chris Rizos, President International Union of Geodesy & Geophysics (IUGG) School of Civil & Environmental Engineering UNSW Sydney Australia
I have had the pleasure of knowing Richard since the mid 1980s, when we were part of the team that produced the first and highly successful book on GPS, namely the Guide to GPS Positioning. We have interacted regularly ever since. I have always appreciated reading Richard’s papers for their clarity, thoroughness and novel content. His Innovation column in GPS World for 35 years is now a GPS classic that post-graduate students and experts alike learn from and enjoy reading. Richard has deservedly received major awards for his numerous and outstanding work. Richard, I hope that we will continue to benefit from your contributions for years to come. – Professor Gérard Lachapelle, University of Calgary
Despite being a highly respected leader in the field of PNT, Richard remains a humble human being. He sets a high standard for his work and is generous with his time to catch even the smallest errors in research papers. It has been a great pleasure to get to know him and to have the opportunity to work with and learn from him. He is an inspiration and a role model for me. – Professor Jade Morton, Ph.D., Helen and Hubert Croft Professor Ann and H.J. Smead Aerospace Engineering Sciences Department University of Colorado Boulder
I have had the privilege of knowing Prof. Richard Langley for my entire career in PNT and have always been greatly impressed with his wealth of knowledge and research on high-precision applications of GPS. I first met him in the late 1980s at meetings of the Civil GPS Service Interface Committee (CGSIC) and the early Institute of Navigation conferences on GPS in Colorado Springs. When I joined the navigation team at the U.S. Department of Transportation as a young engineer in 1988, we all had copies of The Guide to GPS Positioning, that Prof. Langley co-authored with David Wells and that we greatly utilized! Since that time, I have enjoyed interfacing with Prof. Langley at ION conferences and serving with him on the ION Council. I have learned so much from his research, including his development of the UNB-RTK system and the study of atmospheric effects for the FAA Wide Area Augmentation System (WAAS), as well as the very informative articles he has published in GPS World! – Karen Van Dyke, Director, Positioning, Navigation, and Timing U.S. Department of Transportation
The 35-year anniversary of Richard’s Innovation column in GPS World seems amazing, also recalling the recent 30-years celebration of the International GNSS Service (IGS), which to many of us seemed like an eternity. This is not surprising, however: from the Guide to GPS Positioning, co-authored by Richard (my first GPS handbook when I started learning about GPS in November 1989 at ICC, Barcelona); to the knowledge, motivation and empathy we have always enjoyed when meeting Richard in so many different workshops (ION, Beacon Satellite…) and collaborative works (e.g., IERS Conventions…). For him, this is normal. CONGRATULATIONS. – Professor Manuel Hernandez-Pajares, UPC-IonSAT, IEEC-CTE Head of the UPC-IonSAT Research Group, IGS Associate Analysis Center Department of Mathematics, Universitat Politècnica de Catalunya, Barcelona, Spain
Professor Langley has been a vital contributor to the Institute of Navigation (ION) for four decades, serving in various volunteer and leadership capacities. In his most recent role, Richard has served as the Editor-in-Chief of NAVIGATION, The Journal of the Institute of Navigation, our esteemed peer-reviewed technical publication. Since taking on this role in 2020, he has expertly led a team of associate editors, guiding NAVIGATION through a transformative period as it transitioned from a traditional print publication to a fully open-access journal. Under his leadership, the journal has seen a remarkable increase in its impact factor, most recently rising to 3.1. Beyond his editorial work, his most important contribution lies in his mentorship. He has profoundly influenced the next generation of GNSS experts, nurturing countless graduate students through ION’s programs and initiatives while fostering their professional development. His dedication to education and commitment to innovation has enriched our community. We deeply value our ongoing collaboration with Richard. His unwavering commitment, expertise, and passion for GNSS and ION have made him an integral part of our organization. It is a privilege to work alongside such a dedicated professional. – Lisa Beaty, Executive Director Institute of Navigation
Like many others, I look back to a long friendship with Richard, who’s always been a mentor and model for me. His sharp mind, paired with a distinct sense of very British humor makes each meeting with him a source of inspiration and memorable experience. From gentle spelling and grammar corrections in manuscripts to advice and leadership in GNSS-related projects, he always offers a helping hand, contributes in-depth knowledge and one or another personal anecdote. From him, I learned the “six P” rule: proper planning and preparation prevents poor performance. This unforgettable saying not only reflects the rigor Richard applies to his work, it also provided me a guideline that I’m now passing on to my own students. – Oliver Montenbruck, Ph.D. Head, GNSS Technology and Navigation Group German Aerospace Center (DLR)
I would like to say, as someone who is not his direct advisee, I’ve always appreciated his avuncular spirit, mentorship, and encouraging guidance over the years. I join you in toasting to him and his successes in growing and connecting the navigation community over his many years of service, in addition to all his technical achievements and innovations. Cheers to Richard! – Professor Seebany Datta-Barua Illinois Institute of Technology
Richard has been a highly respected leader in the GNSS community for more than 30 years, making his mark as a creative innovator, a mentor for generations of future leaders and contributors to the advancement of GNSS, and as an insightful and patient teacher. The well-worn copy of his Guide to GPS Positioning on my bookshelf has helped me and countless students quickly pick up the basics, while his cheerfully engaging series of “Innovation” columns in GPS World explored every feature, misconception, novel application, mystery, and intricacy of GNSS. And, he literally put Fredericton on the map for the GNSS community. – Penina Axelrad, Distinguished Professor University of Colorado
When I became GPS World’s managing editor, in 2000, my exposure to GPS was limited to a few journal articles I had read as a graduate student in international security at MIT in the mid-1990s. Much of my education on the subject during the steep learning curve that followed came from Richard’s “Innovation” column. Also, as his liaison to the magazine, I was responsible for entering his many, meticulous edits to each column, which, at the time, he sent me by fax. Nearly a quarter century later, Innovation is still my favorite section in the magazine. I will miss it greatly.” – Matteo Luccio, Editor-in-Chief, GPS World
Good memories of my collaborations with Richard span a long time to almost the operational beginnings of GPS. Examples range from our collaboration on the Handbook for GNSS to our shared lecturing at the “GPS for Geodesy” school, in Delft, 1996. I always experienced with admiration Richard’s encyclopedic knowledge and excellent lecturing and writing skills. The only one thing that I would have wished for is that Richard would have turned his excellent Innovation columns in GPS World into a book. That would have been a bestseller for sure. – Professor Peter Teunissen Delft University of Technology
I first met Richard in 1982 while a postdoc at MIT about the time that he joined the faculty at the University of New Brunswick, after his postdoc in the same MIT department. After research in VLBI and SLR, he was one of the early pioneers in the development of GPS for precise positioning applications, with contributions in several areas, such as signal multipath and tropospheric refraction. We both taught at the International School of GPS for Geodesy in Delft, first in 1995, and contributed to the resulting monograph, GPS for Geodesy. I have a vivid memory of drinking beer with him in a bar in Delft after a long day at the school. – Professor Yehuda Bock Scripps Institute of Oceanography
I first met Richard shortly after joining MIT as a Ph.D. student in 1979. He was a postdoctoral fellow for two years with MIT’s Department of Earth and Planetary Sciences, carrying out research in geodetic applications of lunar laser ranging and very long baseline interferometry after completing his Ph.D. at York University, Toronto. His research at MIT led to the discovery of a 50-day oscillation in atmospheric angular momentum and length of day determined from lunar laser ranging data. This work was published in 1981 in Nature. Richard has been publishing impactful papers on important topics since very early in his career. His contributions to GPS World’s “Innovation” column have followed that trend. – Professor Thomas Herring Massachusetts Institute of Technology
I did not have tons of personal contact with Richard, but the contact I did have showed me that he was a man of very high standards, and it’s clear that his dedication to the field is enormous. The combination of high standards and selfless dedication is what moves us forward. He also attracted and produced a cadre of highly talented and successful researchers that continue to have an enormous impact on the field. These are great things! – Anthony J. Mannucci, Ph.D. Deputy Manager, Tracking System and Applications Section Jet Propulsion Laboratory
Years ago when assembling material for my advanced GNSS signal processing course here at the University of Texas, I found that for several topics Richard’s “Innovation” column had just the discussion and analysis I was looking for my students to learn. His writing is unfailingly engaging and lucid! What a gift to the community his “Innovation” column has been! Richard is an amateur radio enthusiast. Many of the insights on radio in his columns are backed up by his practical experience with long-distance ham radio communications. He’s connected with people from continents away from his home base in New Brunswick. – Professor Todd E. Humphreys, Ashley H. Priddy Centennial Professorship in Engineering Dept. of Aerospace Engineering and Engineering Mechanics The University of Texas at Austin
I first met Richard Langley in 1989 at what was my first ION Satellite Division meeting. It was a young-looking crowd, but we both could pass for young men then. I also met another young man by the name of Glen Gibbons who was circulating among the attendees to gauge interest in a trade magazine devoted to GPS that he was thinking of launching. GPS World played an important role in my career as a GPS engineer, particularly for its “Innovation” column, edited by Richard. His early columns (such as “Why is the GPS Signal So Complex?”) are classics of cogent writing and served as an inspiration to me when I tried my hand at writing about GPS. His skills as an editor, and his generosity to help a friend avoid embarrassing himself, proved even more helpful to me. My debt to Richard has grown over the years, and so has my admiration and affection for him. – Professor Pratap Misra, Professor of the Practice of Mechanical Engineering Tufts University
When I googled “Richard Langley,” just for fun, I got multiple returns — among them “professional football player,” “state politician,” “actor,” “model maker” and I thought for a while that those are Richard’s other personalities that I didn’t know about. Well, a slight refinement of my search “Richard Langley, geodesy” got me what I was looking for — pages and pages on the accomplishments of the Richard Langley as one of the first scientists who recognized the great potential of GPS as a scientific and civilian tool and an everyday commodity, research publications that all GPS “insider wannabees” have read and memorized, and articles documenting his commitment to GPS World, especially its “Innovation” column — which has long been one of my favorite reads. I congratulate Richard on the 35th anniversary of this outstanding column! – Professor Dorota Grejner-Brzezinska, Vice-Chancellor for Research at University of Wisconsin-Madison
Richard and I first met when I spent a post-doc year at the University of New Brunswick in 1983/84. The nucleus of the Bernese GPS software emerged from this visit. Richard and I became friends and stayed in contact after this visit. We met last time in Bern at the 2024 IGS Symposium commemorating 30 years of the International GNSS Service. What I admire most about Richard is his scientific breath and his at times artistic use of the English language — he announced his visit to Bern with the words “I will be there if I don’t ‘keel over’ between now and then.” – Professor Gerhard Beutler University of Bern
Richard, Fredericton, New Brunswick, 2014.
Andrew Morley, Richard, Anthony van der Wal, Katrina van der Wal, Denise Santos, Marcelo Santos, Katie Komjathy, and Attila Komjathy, Fredericton, New Brunswick, ~1994.
GPS-for-Geodesy lecturing team. Top-row, left-to-right: Richard, Oscar Colombo, Yehuda Bock, Gerhard Beutler, and Alfred Kleusberg. Bottom-row, left-to-right: Hans van der Marel, Geoffrey Blewitt, Clyde Goad, and Peter Teunissen, Delft, The Netherlands, 1996.
Attila Komjathy, Rodrigo Leandro, Sunil Bisnath, Richard and Fanni Komjathy, ION GNSS+ Miami, Florida, 2018.
Attila Komjathy, Sunil Bisnath and Richard, IGS Symposium and Workshop, Bern, Switzerland, 2024.
Sunil Bisnath, Steffen Schön, Richard and Attila Komjathy, Denver, Colorado, 2022.
Bill Boucher, Katie Komjathy, Richard, and George Dewar, Halifax Nova Scotia, ~1994.
Attila Komjathy, Sunil Bisnath, Jade Morton and Richard, Ann and H.J. Smead Department of Aerospace Engineering Sciences, University of Colorado Boulder, Colorado, 2023.
Attila Komjathy and Richard, Nagycenk, Hungary, 1991.
Gerhard Beutler and Richard, IGS Symposium and Workshop, Bern, Switzerland, 2024.
Richard, Gary McGraw, Penina Axelrad, Frank van Graas, Dorota Grejner-Brzezinska, Oliver Montenbruck, John Betz, Todd Humphreys, Bradford Parkinson, Jade Morton, Terry Moore, Boris Pervan, Todd Walter and Frank van Diggelen. ION GNSS+ 2023 conference, Denver, Colorado, 2023.
Attila Komjathy, Ivan Smolyakov, Richard, and André Hauschild. ION GNSS+ 2010 conference, Portland, Oregon, 2010.
Richard, ION GNSS+ 2022 conference, Denver, Colorado, 2022.
Department of Geodesy and Geomatics Engineering staff at the University of New Brunswick: Lorry Hunt, Marcelo Santos, Greg Smith, Peter Dare, Michelle Ryan, Robert Kington, David Fraser, Monica Wachowitz, Yun Zhang, Sylvia Whitaker, Emmanuel Stefanakis, David Coleman, Richard, Ian Church and Terry Arsenault, Fredericton, New Brunswick, Canada, 2016.
The HSRP is a federal advisory committee that provides NOAA with independent advice on improving the quality, efficiency, and usefulness of NOAA’s navigation-related products, data, and services. The HSRP advises the NOAA Administrator about its navigation (i.e. nautical charts and ENCs), physical oceanographic (i.e. tides & water levels), geospatial, positioning, and coastal and shoreline programs, products, and services. There are two public meetings each year in different port regions at which public comments from stakeholders and partners are sought. Most of the meetings include webinar capability for those not in the area.
See an excerpt below of the agenda for the three-day meeting. These meetings are open to the public and I would encourage anyone interested in the activities of these program offices to participate in the meetings. Participants can attend in person or virtually via webinar. I participated in the meeting in virtual mode. The HSRP website provides links to reference documents, presentations, and recordings.
This newsletter will highlight the session on the NGS Geospatial Modeling grants.
Excerpt from the HSRP 2024 Fall Meeting Agenda
September 24, 2024
Presentations:
Opening and welcome
Mr. Sean M. Duffy, Sr
Mr. Mark Schrupp
Sen. Peters (MI), video
Rep. Theander (MI), video
Ms. Rachael Dempsey
RDML Benjamin Evans
Opportunities and Challenges for the NOS’s Navigation Observations and Positioning Portfolio
Moderator: Ms. Rachael Dempsey
Dr. Larry Mayer
Dr. Marian Westley
RDML Benjamin Evans
Dr. Shachak Pe’eri
Directors FSK update
Local, Regional, State Stakeholder and Partner Perspectives on NOAA Navigation Services
Moderator: Mr. Eric Peace
Capt. Richard Armstrong
Mr. Paul LaMarre
Capt. Tony Brandano
Capt. Peter Barry
Mr. Derek Cusimano
Underserved Communities Mapping and Charting needs in the Great Lakes Region
Moderator: Mr. Nathan Wardwell
Dr. Jennifer Boehme
Ms. Stephanie Gandulla
Mr. Ed Bailey
September 25, 2024
Vdatum
Dr. Shachak Pe’eri
International Great Lakes Datum (IGLD)
Dr. Jacob Heck
Ms. Sierra Davis
HSRP Working group:
HSRP Technical Working Group Report
September 26, 2024
NGS Geospatial Modeling Grants
Moderator: Mr. Galen Scott
Dr. Jeff Freymueller (Ph.D.)
Ms. Mara Figueroa Berrocá
Great Lakes Perspectives on National Drivers
Moderators: Mr. Nathan Wardwell and Mr. Eric Peace
Ms. Erika Jensen
Mr. John Bratton
Mr. Mark Breederland
Mr. Ryan Chatland
NOAA Center of Excellence for Operational Ocean and Great Lakes Mapping
The session on NGS geospatial modeling grants provided updates by representatives from MSU (Jeff Freymueller) and OSU (Mara Figueroa Berroca). I have provided a few highlights below, but I encourage everyone to download the presentations and/or listen to the daily recording.
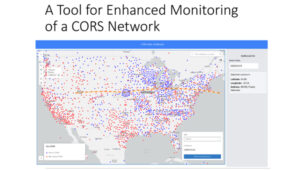
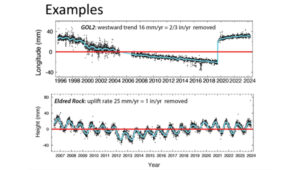
Freymueller highlighted that keeping the error in coordinates small in a spatial reference system is hard to do in a deforming Earth. This is very important to all users of the National Spatial Reference System (NSRS). Not all CORS are created equal, and their coordinates can change based on various factors such as earthquakes, equipment changes, and local deformation due to the extraction of groundwater. Therefore, efficiently and effectively monitoring the CORS is necessary to quickly identify issues and correct coordinate values in a timely manner. MSU developed a CORS Dashboard that provides a tool for monitoring CORSs. Freymueller provided a slide depicting an example of a CORS in California. See the image below.
MSU CORS dashboard. (Photo: HSRP Website)
Plots of GLO2. (Photo: HSRP Website)
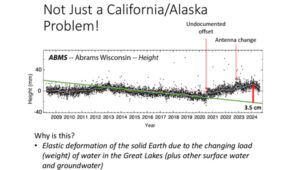
That said, Freymueller stated that crustal deformation and changes in CORS coordinates is not just a California issue. He provided a slide of a plot of a station in Wisconsin (see the image below.) The plot highlights changes in values where there’s an undocumented offset, a change in antenna, and an elastic deformation due to a change in water load in the Great Lakes.
Plot of ABMS. (Photo: HSRP Website)
As previously mentioned, keeping the error in coordinates small in a spatial reference system is hard to do in a deforming Earth, especially when so many factors affect coordinates, such as the changing load of water on the Great Lakes. The MSU CORS Dashboard will provide a tool for monitoring the CORS and identifying issues associated with coordinates of the CORSs.
The MSU CORS Dashboard plans include having different modules for various purposes:
Compare Solutions:
With other solutions
With Velocity Model
Compute and Display Metrics and select CORS stations based on metrics.
Earthquake and Postseismic Deformation Modeler:
Ingest fault model solutions and generate predictions
Statistics on agreement of different fault models
How well do the range of geophysical models agree?
Forward predict postseismic deformation
The MSU CORS Dashboard provides information about CORSs that could be useful to surveyors and mappers when performing and analyzing a GNSS survey project. For example, one module will compute and display metrics about individual CORSs, providing surveyors with the appropriate information to select the best CORSs for their GNSS project. NGS and MSU will determine how this CORS Dashboard is incorporated into NGS products and services.
Another phase of the MSU geospatial modeling grant included developing a geodesy program to help address the U.S. geodesy crisis. The presentation provided several slides with information on students obtaining a master’s degree in geodesy. The coursework for the two-year online program is divided into four thematic areas: Foundations of Geodesy, Fundamentals of Geodesy and Geophysics, Mathematical and Computational Concepts, and Geodetic Methods and Applications. Students will take a mix of courses (no thesis) from the consortium institutes – MSU, Michigan Technological University (MTU and the University of Alaska Fairbanks (UAF).
The following is a Timeline for Development:
2024: Develop University consortium agreements and establish structure for master’s program
2024/2025: Develop courses
Fall 2025: Launch program with first class of students
Freymueller mentioned that the timeline for launch currently feels optimistic due to bureaucratic hurdles dealing with the consortium agreements, but they are continuing work on the development of courses. Further newsletters will provide updates on the progress of the program.
Outline of Geodesy Master’ Degree
Foundations of Geodesy
Courses:
Map Projections (MSU)
Geodetic Models (MTU)
Both courses required
Courses provide backgrounds in mapping, projections, datums, reference frames, and transformations.
Fundamentals of Geodesy and Geophysics
Courses:
Modern Geodesy and Applications (MSU) or Geodetic Methods and Applications (UAF)
Geodetic Data Processing and Analysis (MSU)
Solid Earth Geophysics and Geodynamics (MSU) or Foundations of Geophysics (UAF)
Positioning with GNSS (MTU)
Students choose at least 2 courses
Courses provide background in geodetic theory (including orbit determination and GNSS and imaging satellite systems), measurement and interpretation of steady state and time variable motions within the solid Earth, cryosphere, and hydrosphere, data processing, and geophysical modeling.
Mathematical and Computational Concepts
Courses:
Introduction to Numerical Tools for Earth and Environmental Sciences (MSU)
Programming and Automation for Geoscientists (UAF)
Data Analysis and Adjustments (MTU)
Inverse Problems and Parameter Estimation (UAF)
Numerical Analysis (UAF)
Students choose at least 2 courses
Courses will provide foundation in programming and mathematical techniques (including inversion theory and linear regression) essential for geodesy
Geodetic Methods and Applications
Courses:
3D Surveying and Modeling with Laser Scanning Data (MTU)
Courses extend knowledge into additional land- and satellite geodetic techniques, network design, and geophysical applications
The second presentation on the geospatial modeling grants was titled “Developing a Fully Kinematic, Backwards-Compatible Reference Frame for the Continental United States of America and Canada,” presented by Mara A. Figeroa, OSU.
OSU Presentation. (Photo: HSRP Website)
Figeroa outlined the following project goals:
Development of the operational (sandbox) kinematic reference frame (KRF).
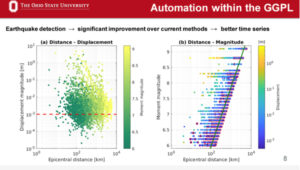
Develop automation processes to detect and model deformation resulting from earthquakes, GIA and other crustal motions.
Parallelization wrapper for M-PAGES (adapted from our existing Parallel.GAMIT)
Process all existing data in the U.S. and Canada
Creation of Intraframe deformation models (i.e. trajectory prediction models)
Use GNSS and InSAR aided by AI to access the conventional epoch of the frame.
Provide the users with maps of “stable areas” to facilitate access to the frame using differential processing.
Figeroa noted that the coordinates and model parameters defining the reference frame are time-dependent in a National-Level Kinematic Reference Frame (KFR). The KFR needs to provide multiple conventional epochs that are accessible to all users anytime and anywhere to guarantee topologic homogeneity. Models need to be updated to account for the changes in coordination due to earthquakes and other deformation events. Figeroa stated, “Kinematic implies constant update of the reference frame parameters to ‘honor’ the frame’s internal geometry.”
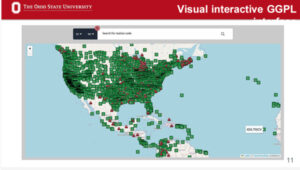
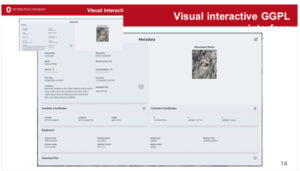
OSU has developed what they denote as a Geometric Geodesy Processing Line (GGPL) to evaluate and analyze CORSs data. They are processing all CORSs data to identify issues with the data that could be due to various factors such as crustal deformation and equipment changes. The tool highlights stations with a potential warning flag issue (see OSU Interactive GGPL).
OSU Interactive GGPL. (Photo: HSRP Website)
The system is automated, but they have developed interactive visual tools so researchers can review the results of each station. The visual interactive GGPL provides metadata about the station such as coordinates, maps, photos, and dates of installation of equipment.
OSU Interactive GGPL – Location and Photo. (Photo: HSRP Website)
OSU Interactive GGPL – Equipment. (Photo: HSRP Website)
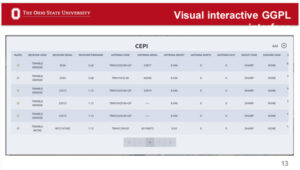
OSU Interactive GGPL – Coordinates and Other Metadata. (Photo: HSRP Website)
One feature of the GGPL is that it generates plot changes in coordinates over time (see the image below). I recently participated in a School of Earth Science Advisory board meeting at OSU and visited with Demian Gomez, Ph.D., the project’s lead principal investigator.
Demian demonstrated the GGPL tool for me. I was really impressed at how fast the system was, as well as how much information it provided in a user-friendly format. In my June 2024 GPS World Survey Scene newsletter, I highlighted an issue I found with an antenna change at a CORS in Texas. I ask Demian to pull up the information for the same site. The GGPL highlighted the same antenna change and shift in coordinates that I found. This feature is important to developing an intraframe deformation model (IFDM). How NGS will use this in the development of the IFDM2022 for the new, modernized NSRS will be determined later by NGS.
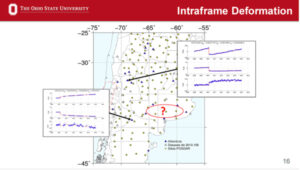
An important aspect of an IFDM is to identify and model changes in coordinates due to crustal deformation. As mentioned by Freymueller, modeling earthquake and other deformation events is extremely important to maintaining an accurate spatial reference frame. OSU GGPL tool assists in identifying potential deformation due to earthquakes.
OSU Interactive GGPL – Detection of Earthquakes. (Photo: HSRP Website)
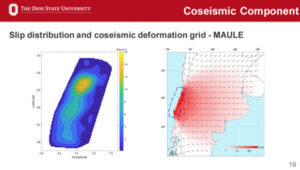
OSU’s process includes developing trajectory prediction models (TPM). Trajectory prediction models need to be continuous in space and time to predict the behavior of passive benchmarks. Accurate trajectory prediction models will ensure access to a geodetic reference frame after big earthquakes utilizing accurate post-seismic coordinates. OSU’s process includes developing techniques for observing GNSS networks in sparse areas to improve the model’s predictability. My May 2024 GPS World Survey Scene newsletter highlighted Demián’s extensive experience modeling time-dependent coordinates and several papers published in the Journal of Geodesy addressing this topic. The papers have demonstrated the model’s effectiveness in earthquakes in Argentina and have developed tools that provide coordinates in updated reference frames based on the models. This is important to users of the new, modernized NSRS because the accuracy of the IFDM2022 model is vital to providing accurate Reference Epoch Coordinates (RECs) in the new, modernized NSRS. See my August 2022 GPS World Survey Scene Newsletter for information on RECs and my May 2024 GPS Newsletter for more details on Demián’s work.
Model of Co-seismic Component. (Photo: HSRP Website)
This newsletter highlighted the progress that OSU and Michigan State University have made in developing tools that will be useful for developing and implementing the new, modernized NSRS in 2025.
As I previously mentioned, I would encourage everyone to download the presentations and recordings for more details. The recording of the session on NGS Geospatial Grants can be found on the Sept. 26, 2024, recording. (The session on NGS Geospatial Grants starts at 1:02:45 on the recording.)
Similarly to my previous newsletter, I want to remind everyone that in less than a year, NGS will finalize the new terrestrial reference frames and geopotential datum. Time really is running out and users need to obtain a working knowledge of the new, modernized National Spatial Reference System.
Timing — the unglamorous yet essential T in PNT (positioning, navigation and timing) — has been called “the invisible utility.” In fact, it’s been a long time since we last put a GNSS-timing receiver on the cover. (Partly that’s because, like with simulators, it’s hard to come up with a visually compelling image that conveys the role of such a device.)
From St. Augustine (“What, then, is time? If no one asks me, I know what it is. If I wish to explain it to him who asks, I do not know.”) to theoretical physicist Carlo Rovelli (who argues that time is “part of a complicated geometry woven together with the geometry of space”), time is both one of the greatest mysteries of nature and one of our most practical concerns. For satellite navigation, time is both essential to its functioning and a fabulous by-product. As David Wells and Alfred Kleusberg wrote in the first “Innovation” column, in the first issue of this magazine, “One of the by-products of getting an SPS [Standard Positioning Service] position fix is that a clock in the user’s receiver is automatically synchronized to clocks in the GPS satellites to an accuracy of one ten-millionth of a second. Therefore, any GPS receiver is a very accurate time distribution device.” (“GPS: A Multipurpose System,” January-February 1990.)
As Richard Langley wrote in another early “Innovation” column, “Thanks to minute energy changes in individual atoms of cesium and rubidium, humankind possesses the ability to synchronize clocks anywhere in the world to better than 10 nanoseconds. But given this amazing ability to measure time, we still don’t know what time actually is.” (“Time, Clocks, and GPS,” November-December 1991.)
I procrastinated the task of writing this editorial and now another aspect of time is here to impose its claim: our production deadline. So, just one anecdote and a final quote, and I will be done, just in time.
The anecdote. A quarter century ago, during my first time around on this magazine’s staff, when Glen Gibbons was the group editorial director, Alan Cameron the senior editor, and I the managing editor, we had just one meeting a month, called “edit check,” a couple of days before the deadline to send each issue to the printer. We printed out all the pages, laid them down in order around a large conference room table, and walked around the table examining each one and making notes about small final corrections and revisions.
Only one page routinely had a large empty area: It was the one for Glen’s monthly editorial, which he always finalized (wrote?) at the last possible moment. I once joked that it would be blown in at the printing plant like the magazine’s subscription cards. Well, as I finish this editorial, we are at T minus two days for the November issue. Enjoy it!
Oh, and the final quote, again from Rovelli: “The events of the world do not form an orderly queue like the English. They crowd around chaotically like the Italians.”
Question: What are currently the most promising approaches to non-GNSS PNT for applications that do not require high accuracy?
Answer: The DOD PNT strategy posits use of space-based, regional and local sources of information to ensure PNT resilience if GPS is disrupted. Resilience does not require GPS-quality accuracy but must enable service continuity for operations while GPS is unavailable. Local sources are viable for limited areas; however, regional sources are necessary for broader coverage. Enhanced Loran (eLoran) can be a viable and affordable backup to GPS. It broadcasts at a much higher power and at a different frequency than GPS, is virtually un-jammable over wide areas, is receivable underwater, and offers a communications channel. eLoran has been recommended as a critical infrastructure backup to GPS by the National PNT Advisory Board and directed by the U.S. Congress. Yet, lacking federal interest or resources, its infrastructure is heedlessly being dismantled — while Russia, China and Iran invest in their own Loran-based backups. What do they know that the United States does not?
Q: What reforms in GPS governance would help accelerate the modernization of the system?
A: Today, modernized GPS is not enough, though it remains the cornerstone of the national PNT Enterprise. Attention to the entire Enterprise is urgently needed. With GPS, the United States enjoyed a dominant GNSS position for nearly three decades. Absent PNT attacks or mishaps, a sense of ‘business-as-usual’ lethargy impedes GPS improvements and the adoption of complements. Leadership watches GPS modernization slide to the right while its complements and needed domestic critical infrastructure backups languish. Within DoD, GPS is no longer a discrete program, and there is no other joint program to command resources and bring urgency and coherence to resilient PNT efforts. Structural changes and experienced, competent acquisition managers are necessary to focus resources and deliver capabilities, and committed leadership is essential for continuity. They must acknowledge PNT as vital to our national security and economy — while our adversaries and competitors leverage its value and can exploit any unaddressed vulnerabilities.
Many of us mindlessly shop for food, fuel, clothing, home goods and more without thinking much about where it all comes from, forgetting that in most cases it all started on a farm. Most people are unaware that a key component of agriculture production, besides the soil beneath our feet, is the use of critical technologies such as GPS and other GNSS contstellations. When fully leveraged, technology can be a part of the solution to many of the challenges farmers face today and be a tool in feeding a growing global population.
With technology at their fingertips, farmers across the globe can enhance their productivity through precision agriculture — a practice that uses GNSS technology to maximize agricultural outputs, while reducing farmer inputs and improving sustainability. Precision agriculture is used to till, plant and harvest crops such as corn, soybeans, cotton, peanuts, wheat, tubers and alfalfa. For example, techniques including yield mapping for fertilizer application have been used on fields across the country for more than three decades.
Social and Economic Benefits of Precision Agriculture
According to the U.S. Department of Agriculture (USDA), total U.S. farm output tripled from 1948 to 2021 largely due to advancements in technology — even as farm labor, land and other inputs declined. Farmers needed 8 million fewer acres to produce the same wheat yields in 2018 as in 1990, according to an American Farm Bureau Federation report.
A closer look at four crops commonly tilled, planted and harvested using precision agriculture techniques highlight technology’s economic benefits:
Sweet Corn: The United States is the largest producer of sweet corn at roughly 315 million tons per year, accounting for 34% of global production. There are more than 316,000 U.S. corn farms, 95% of which are family-owned. In 2021, Florida was the largest producer of sweet corn, followed by California, Washington and Michigan. The United States exports 69 million tons of sweet corn annually, yielding a value totaling $9.2 billion. China is the largest buyer of U.S. sweet corn, purchasing 31% of all U.S. exports.
Peanuts: In 2023, the United States produced roughly $1.6 billion in peanuts, led by Georgia — with 55% of total U.S. peanut production — followed by Texas (10%), Alabama (10%), and Florida (9%). In 2023, the United States exported more than $889.5 million worth of peanuts, with Mexico and Canada as top destinations. With new techniques to adjust digger conveyor speeds, yield continues to improve.
Cotton: The United States produces roughly 15 million bales of cotton each year, contributing to a $21 billion industry. Texas boasts the highest number of planted acres with 40% of the U.S. supply (6 million bales), followed by Georgia at about 2.5 million bales. The United States is the world’s leading exporter of cotton, totaling 35% of the total global supply. Farmers are increasingly using autosteer technology to help grow and harvest cotton — with the adoption of precision agriculture equipment jumping from 46% in 2008 to 86% in 2023, according to a survey conducted by Cotton Grower.
Wheat: The United States produces roughly 7% of the global wheat supply — accounting for roughly $12.7 billion — with Kansas, North Dakota, Montana, Texas and Oklahoma producing the most wheat across the country.
Precision agriculture also helps farmers work toward important conservation goals. Auto guidance capabilities and seeding sensors increase tractor and seeding efficiencies, reducing herbicide use by 9% and fossil fuel use by 6%. These small but important changes contribute to a wider effort to employ more sustainable agriculture practices, with precision agriculture and GPS technology sitting front and center.
Through it all, GNSS remains at the forefront of a strong, efficient agriculture system. Whether it’s auto-steering tractor technology or strengthened hydrology practices, new precision agriculture technologies are released every year. If broader adoption of precision agriculture technologies continues, the United States can increase its national crop production by 6%, bolstering the agriculture economy even further.
GPS Innovation Alliance (GPSIA) members Deere & Company and Trimble are at the forefront of advancing precision agriculture techniques globally, creating more opportunities for farmers to boost their productivity and reduce crop loss with innovative GPS and GNSS technologies.
Deere & Company offers several receivers that use GNSS technology to plant crops with accuracy down to the centimeter and coupled with the sensors and computer vision, allow farmers to plant at quicker speeds without damaging crops — including its fully autonomous 8R tractor unveiled in 2022. While Deere & Company had been developing new GNSS receivers for years, a critical partnership with NASA’s Jet Propulsion Laboratory (JPL) in 2004 was groundbreaking. Deere & Company modified its GNSS receivers to tap into the agency’s network of ground stations and incorporated JPL’s software. The innovation allowed them to introduce autonomous tractors worldwide, revolutionizing precision agriculture and leading to a wider acceptance of autonomous tractor technology.
Trimble has brought innovative solutions to precision agriculture since the company first began producing its agricultural GPS receivers in 1997. Since then, the company has unveiled state-of-the-art technologies to support farmers, including RTX technology which uses precise point positioning (PPP) to allow farmers to plant seeds and farm with sub-inch GNSS accuracy. Trimble also has announced several partnerships that strengthen the company’s precision agriculture capabilities from CNH and CLAAS (2011) to Horsch (2021) to AGCO (2023).
In 2022, Trimble deepened its partnership with agricultural machinery manufacturer CLAAS to integrate Trimble’s GPS PILOT system and SAT 900 GNSS receiver with CLAAS’ CEMIS 1200 display, providing farmers greater accuracy when tilling, seeding, spraying, or harvesting their fields. In April 2024, Trimble created a joint venture with AGCO to accelerate the pace of innovation and increase farmer’s access to precision agriculture technology.
Critical Role of Broadband in Precision Agriculture
Reliable broadband connectivity goes hand-in-hand with GNSS technologies and allows full use of agriculture technology and its resulting benefits. According to the USDA, more than 20% of rural households and farms do not have reliable access to broadband, limiting access to new technologies that would enhance efficiency and help farmers grow their businesses.
Industry leaders are working to ensure that farms across the country can reliably access the Internet. For example, Deere & Company, in partnership with SpaceX, is working to close the connectivity gap among farmers with satellite communications (SATCOM) services. Later this year, Deere & Company will begin to offer Starlink satellite communications technology to farmers across the United States and Brazil.
Beyond industry investment, the USDA’s Rural Development Broadband ReConnect Program provides grants and loans to strengthen broadband infrastructure and equipment in eligible rural areas. In addition, the National Telecommunications and Information Administration is overseeing the $42.5 billion Broadband Equity, Access, and Deployment program, intended to expand high-speed Internet access for communities across the country with little to no Internet connectivity. Establishing tech-neutral policies within these and similar programs as well as focusing on delivering coverage to uncovered agriculture lands to the last acre is key to improving efficient agriculture production.
Precision Ag on the Hill
Precision agriculture is also making its way into policy conversations at all levels of government as awareness around agriculture technology and its benefits are realized.
The 2018 Farm Bill established the Task Force for Reviewing the Connectivity and Technology Needs of Precision Agriculture in the United States (“Precision Ag Connectivity Task Force”) within the Federal Communications Commission. The Task Force is currently completing its third and final term this year and will have produced three comprehensive reports with related recommendations for policymakers.
The 2018 Farm Bill expired on Sept. 30, 2023, but was extended for one year to allow the U.S. Congress additional time to come to agreement on the next five-year reauthorization bill. The Farm Bill presents a key bipartisan legislative opportunity to include incentives for agriculture technology adoption. Lawmakers should consider previously introduced standalone legislation, including the PRECISE Act and the PAL Act, to accomplish this goal. Together, these bills would expand existing USDA programs to include precision agriculture technologies and create a new loan program.
Small family farms account for roughly 88% of all farms in the United States but make up less than 20% of all U.S. agricultural products sold. To increase yields and better compete with large-scale farms, farmers are increasingly turning to precision agriculture technologies — though availability remains a challenge. Understanding these statistics, efforts to promote equal access to precision agriculture enjoy bipartisan support from both chambers of Congress.
Reflection
GNSS technology’s role in precision agriculture continues to save farmers time and money, while simultaneously providing conservation-oriented solutions for farmers, consumers and the planet. GPSIA members Deere & Company and Trimble have contributed innovative solutions to precision agriculture technology for decades, enhancing efficiencies through groundbreaking partnerships and expanding opportunities for farmers to use the technology. These innovations, coupled with recent rural broadband expansion efforts, ensure farmers can access the most cutting-edge technology and continue to innovate. The focus on precision agriculture on Capitol Hill is an important reminder of the wider implications of GNSS in our everyday lives and how GNSS systems fit into the U.S. agriculture industry. GPSIA is proud to support its members as they continue to promote the use of innovative GNSS technologies in agriculture.
On Sept. 1, 1983, Korean Air Lines flight KAL007, with 269 people on board, went 360 miles off course and strayed into prohibited airspace over one of the Soviet Union’s most sensitive military installations. The pilots, who had missed some radio calls and warning shots, were unaware. Then an air-to-air missile hit the plane.
This tragic Cold War episode helped GPS technology spread from military to civilian use because President Ronald Reagan’s deputy press secretary, Larry Speakes, said that to help prevent a repeat of the tragedy, “the President has determined that the United States is prepared to make available to civilian aircraft the facilities of its Global Positioning System when it becomes operational in 1988.” Civilian use of GPS had been envisioned from the program’s beginning, but Reagan’s announcement now guaranteed the future availability of GPS to civilians. That, and later smartphones, spawned the development of the commercial and consumer GPS industry.
More than 40 years later, however, civilian airliners are increasingly at risk of being shot down, as well as many other equally disastrous outcomes, due to spoofing and its percolating effects on many aircraft systems. GPS Spoofing: Final Report of the GPS Spoofing Workgroup, released on Sept. 6, reports a 500% increase in spoofing this year compared to last year, with an average now of 1,500 flights spoofed per day. Among the many dangers this poses, the report states that it has led to “aircraft entering other Flight Information Regions without clearance or authorization, which creates risk of misidentification and, in the extreme case, interception or shootdown.”
The report, based in part on a questionnaire returned by nearly 2,000 pilots — 56% of them working for airlines and 72% captains — found that more than 90% of all crew members rated their concern as moderate or higher. The three most insidious aspects of spoofing for aircraft are that pilots may not be aware of it; that GNSS receivers may continue to yield incorrect positions long after the aircraft leaves the spoofing area; and that bad data from the GNSS receiver has “severe and cascading effects” on many other systems, including the flight management system, the Ground Proximity Warning System, Hybrid IRS, the aircraft clock, weather radar, CPDLC, ADS-B and ADS-C. Spoofing also affects air traffic control, which is inundated with requests for radar vectoring during and after spoofing.
The report finds “an overall sense of complacency and muted interest across a broad section of the aviation industry.” Two of its many recommendations to mitigate the problem jumped out at me: synching a mechanical watch to a known source at dispatch “in preparation for aircraft clock failure” and positioning a handheld GPS receiver “low down in the cockpit such that it only has a direct line of sight to the highest elevation satellites,” which makes it possible “that it may not get jammed and spoofed as easily as the externally mounted antennas.”
Why has it come to this? What will we do about it? You can read the report here.