The U.S. Department of Transportation’s most recent document preparing for the future of self-driving cars almost entirely ignores positioning, navigation and timing (PNT) needs, according to the Resilient Navigation and Timing (RNT) Foundation. And when it does address GPS, it gets things wrong. A Dec. 3 deadline looms for interested parties to file their comments with DOT.
The comment period is open until December 3. Interested parties can make their own comments and read those already submitted at the website for Docket DOT-OST-2018-0149.
The cited comment from the RNT Foundation states that, while most self-driving cars are being designed to navigate without external inputs, GPS/GNSS will still be required to initialize location information for vehicle cold startups. Also, most vehicles will reference GPS/GNSS when communicating their positions to other vehicles and traffic control systems.
Much of the benefit of automated vehicles will come from their participation in Intelligent Transportations Systems. This means wireless networks. The RNT Foundation also urges the department to consider these networks’ critical dependence on GPS timing synchronization in their plans going forward.
(Image: Pavel Vinnik/Shutterstock.com)
The Secretary of Transportation has had a mandate to provide a backup capability for GPS since 2004 that has not been acted upon. The RNT Foundation comments observe that doing so could greatly mitigate all of the concerns mentioned.
Dana Goward is president of the Resilient Navigation and Timing Foundation, based in Washington D.C.
The module was introduced at the Electronica 2018 show, held Nov. 13-16 in Munich, Germany.
As the latest addition to Quectel’s GNSS portfolio, L26-DR is a concurrent multi-GNSS receiver module embedded with dead-reckoning solution, which greatly improves the positioning accuracy and speed while simplifying customer designs, the company said.
The dead-reckoning capability ensures the module delivers the highest performance positioning solution available, even when GNSS signal is absent or compromised, the company said.
Equipped with six-axis sensor MEMs and a powerful GNSS core, the module provides high sensitivity, fast GNSS signal acquisition and tracking with low system integration effort.
Moreover, the built-in low-noise amplifier offers the module with improved RF sensitivity and exceptional acquisition and tracking performances even in weak signal areas.
L26-DR is able to acquire and track any mix of GPS, GLONASS, BeiDou, Galileo and QZSS signals, which allows accurate navigation in harsh environments such as urban canyons, the company added. Compared with using GPS only, enabling multiple GNSS systems generally increases the number of visible satellites, reduces the time to first fix and improves positioning accuracy, especially when driving in rough urban environments.
Designed for automotive and industrial applications, the L26-DR comes in an ultra-compact size of 12.2 × 16.0 × 2.3 millimeters. The compact GNSS module also supports other precise positioning technologies, including differential GPS (RTCM) and SBAS (WAAS/EGNOS/MSAS/GAGAN).
According to the company, engineering samples of Quectel L26-DR will be available in December.
Telit has introduced a new positioning module aimed at India. The SL869T3-I combines GPS with India’s NavIC (IRNSS) navigation system and the country’s satellite-based augmentation system (SBAS), known as GAGAN.
The SL869T3-I module enables the creation of high-performance position reporting and navigation solutions. It complies with Automotive Industry Standard 140 (AIS-140) — an Indian government mandate that requires the use of NavIC for vehicle location tracking devices in all public transportation vehicles, effective April 2019.
The SL869T3-I is a 16 x 12.2-millimeter module with an LLC package. It is provided with a single RF input for L1 and L5 bands. It also contains Flash memory, a low noise amplifier (LNA) and SAW filters. The RF front end is specifically designed to comply with sensitivity specifications contained in AIS-140 standard.
“The new SL869T3-I is among the first IoT GNSS positioning receiver modules to deliver IRNSS/NavIC L5 coverage compliant with the Indian government’s AIS-140 regulation,” said Manish Watwani, EVP global product management, Telit. “This new addition to the Telit family of products results from more than 20 years’ experience in GNSS applications.”
For more information, visit booth C3.227 at Electronica, Nov. 13-16 in Munich, Germany.
Representatives from the global automotive industry gathered at the the Intelligent Transport Systems (ITS) World Congress in Copenhagen in September. At a “Galileo for Mobility” session, panelists showed off new products and discussed the benefits of GNSS for the deployment of multimodality, new mobility services and digital platforms by transport authorities, industries and users.
Their goal: to make safe driverless road transport a reality.
Autonomous driving with multi-GNSS
Cover image of Galileo for Mobility leaflet. (Image: GSA)
Germany’s ANavS GmbH provides position and attitude solutions with centimetre-level accuracy. Fast fixing is achieved by using three GNSS constellations and the company’s patented RTK fixing technology. The system combines multi-GNSS (GPS + GLONASS + Galileo), inertial sensors, vehicle data, visual odometry and feature mapping, as well as LiDAR and radar. Tight coupling of GNSS and all of these other systems ensure reliable positioning even in areas with limited satellite visibility.
ANavS managing director Patrick Henkel said, “Our sensor fusion framework delivers precise position and attitude information for navigation. It also generates real-time, highly accurate maps with high resolution. The platform can be used for the whole range of transport applications from road transport to maritime and drone navigation, as well as in robotics, surveying applications and of course in agriculture for precision farming.”
The system is particularly well suited to autonomous driving applications because of its high accuracy, high availability and continuity, and, with Galileo, its integrity, according to Henkel. The ANavS module is available in different versions, with one, two or three integrated GNSS receivers, depending on the level of performance required.
Sensor fusion with non-connected vehicles
Swedish truck manufacturer Scania led work on the EU-funded project, Precise and Robust Positioning for Automated Road Transports (PRoPART), demonstrating a high-availability positioning solution for connected automated driving applications. The system implements sensor fusion using information from both the on-board vehicle sensors and an off-board road infrastructure traffic sensor, accounting also for non-automated and non-connected road vehicles.
“We are benefiting from the high multipath mitigation enabled by the Galileo binary offset code, and there is a substantial improvement of reliability of the carrier phase ambiguity resolution,” said senior engineer Fredrik Hoxell. “All of this makes Galileo a really good addition to our sensor platform,” he said.
Big data contribution
Digital mapping is of course a critical resource for autonomous driving applications, and Tom Jensen of the veteran manufacturer of personal navigation devices TomTom stated “We have been compiling data from our GNSS receiver users for 10 years. We have 500 million devices currently running and today we have about 90 trillion data points!”
TomTom has dedicated itself to fusing that data for the generation of detailed maps that can be updated within minutes, for understanding traffic flow and traffic changes in near real time. “Now we want to open that up for the users,” he said. “We are meeting with public authorities, governments, decision makers who we know can use this information, for the roads, for the infrastructure, to plan their projects in the best and most intelligent way.”
Preventing terrorist attacks
The H2020-funded TransSec project coordinated by Daimler AG Trucks targets a solution to the recent rise in vehicle-based terror attacks across Europe, often employing heavy trucks to attack pedestrians.
Oihana Otaeguim, head of ITS at TransSec project partner Vicomtech, said, “We are developing and evaluating autonomous systems to detect and prevent trucks from being misused, to prevent these incidents from occurring. The trustability provided by Galileo is very remarkable. We have achieved advances in GNSS positioning, map data and map matching. On-board environment sensors and V2X communication are all combined in a local dynamic map. This can then be used for movement monitoring, critical area alarm, pre-crash object detection and for the implementation of non-defeatable emergency manoeuvres.”
The project team is also concerned with developing new and more effective methods to combat GNSS jamming and spoofing, which represent further threats to security in the context of automated driving technologies. Here, Galileo’s unique authentication feature will play an important role.
3D mapping
Japan’s Strategic Innovation Promotion Program, Automated Driving for Universal Services (SIP-adus) conducts several activities previewing the next generation of road transport systems: the human-machine interface in for autonomous and semi-autonomous driving, and the application of automated driving technologies in buses. The goal is precise stopping at bus stops with almost no space between the bus and the curb, to facilitate boarding and exiting for wheelchair users and elderly passengers.
“The project is validating the specifications and accuracy of a high-accuracy 3D mapping function,” Satoru Nakajo of the University of Tokyo said, “including data updating and distribution systems, and of the critical linkage of dynamic data delivered via road infrastructure.”
Public transport on demand. Area Metropolitana de Barcelona (AMB) will replace an existing fixed bus line with low demand with a flexible service that adapts bus routes according to the actual demand, improving the service and engaging new users without increasing public expenditure. The Galileo-based technology platform will consist of a mobile app and a system that manages requests, confirmations and cancellations, finds the best routes, and monitors distances travelled and payments.
Shared taxis. The pilot aims to alleviate Thessaloniki’s city centre congestion by reducing the number of trips from two eastern suburbs to the city. Ride sharing will be offered to commuters through 20 taxis provided by Taxiway at a flat rate.
Service aggregator. The Mobility as a Service (MaaS) app gathers mobility services available in Barcelona, Madrid and other big cities in Spain. It includes public transport, sharing services by motorbikes, bikes and cars, and bike parkings in these cities, improving accuracy and availability in urban areas, enabling a fast and smooth transition between transport modes, and offering the user a door-to-door and seamless multimodal trip experience.
Campus shuttle. The pilot will link autonomous electric vehicles to major hubs in a university or hospital campus (location to be determined).
Vehicle sharing. The Clem’ project will operate a last-mile transportation service to the community in Plateau de Saclay, an urban campus under development in the suburbs of Paris designed to welcome 85,000 students, workers and inhabitants by 2025. The pilot will include sharing a mixed fleet of 10 geolocated electric cars and 20 electric bikes.
This account drew heavily from published reports by the European GNSS Agency (GSA), available in full here.
Globalstar has launched an automotive division to support connectivity solutions for the next generation of connected and autonomous vehicles and intelligent transport. With Globalstar’s two-way global and broadcast-capable network, automakers will be able to comply with the newest safety regulations, deliver over-the-air (OTA) software updates, increase location accuracy, and improve the reliability for autonomous vehicle operation.
Globalstar’s next-generation global, hybrid network service is designed to leverage both satellite and terrestrial technologies to connect cars. The highly scalable broadcast/multi-cast network delivers common content to multiple users with virtually unlimited scalability.
The network has enhanced GNSS accuracy and integrity with protection levels to increase the safety and reliability of autonomous driving systems.
It is an efficient and secure broadcast service for critical security patches and OTA updates to software and firmware in Telematics Control Units (TCUs), Electronics Control Units (ECUs), and Head Units (HUs), as well as map tile and map layer data. It also provides datacasting of traffic, weather, hazards, and other alerts.
Global connectivity provides optimized routing of content and services.
Telematics. Increased coverage and reliability for ACN/eCall, roadside assistance, vehicle tracking and telemetry. Data can be pulled from vehicles for remote diagnostics, condition-based maintenance, and preventative analytics.
Managed Security. Secure link for global certifcate and key management, audits and compliance monitoring, that aslo enables service to patch vulnerabilities, and update firewalls and intrusion detection systems (IDS).
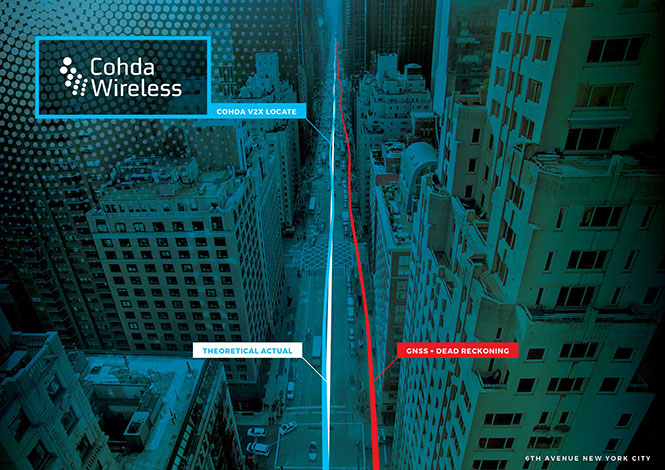
The vehicle-based system V2X-Locate can identify vehicle position to sub-meter accuracy in environments that degrade GPS accuracy, such as tunnels and underground carparks, and between high-rise buildings.
As well as enhancing current connected vehicles, V2X-Locate delivers a critical component for connected autonomous vehicles (CAV), which will require uninterrupted positioning data to safely navigate on roads. V2X-Locate enables equipped vehicles to identify their location using existing Smart City V2X (vehicle-to-everything) roadside infrastructure from any standards-based manufacturer.
V2X-Locate positions the vehicle with sub-meter accuracy by using existing communications signals produced by V2X Smart City infrastructure deployments. The result is that V2X-Locate can eliminate positioning black spots in city centers.
The In-Car Advertising Platform enables automotive OEMs to generate revenue by delivering ads to cars in a safe, user-friendly and contextually relevant way. The end-to-end offering for OEM partners is powered by Telenav’s In-Car Ads SDK (software development kit) and cloud-based intelligent targeting platform.
To ensure driver safety, ads only appear when the vehicle is stopped, such as at car startup, traffic lights and upon arrival. The ads automatically disappear whenever the car is in motion or when users interact with other in-dash functions such as music or phone calls.
Relevant ads such as coupons and recommendations are delivered to customers based on information from the vehicle, including frequently traveled routes, destinations and time of the day. For instance, when the vehicle is low on gas, the platform points out nearby stations along the driver’s route, potentially with discount offers.
The Through Glass Integrated V2X Antenna is designed for vehicle-to-vehicle and vehicle-to-everything (V2X) communications. The design incorporates an integrated GNSS antenna on the interior coupler. The antenna pairs with dedicated short-range communications (DSRC) devices.
The dual-radio, glass-mounted antenna eliminates the risk of damaging the vehicle by using a coupling pair to pass DSRC signals between the vehicle’s interior and exterior, eliminating the need to pass RF cables through the roof or window opening. It antenna can be mounted on the rear, front or side windows using automotive-grade glass adhesive. Flexible installation allows the shortest cable route to the V2X device, reducing signal losses due to cable length.
Spirent Communications plc is working with the European Commission’s Joint Research Centre (JRC) to help implement the eCall system, which is required in new cars sold in Europe starting in April.
Experts from the JRC have been working with Spirent GNSS test equipment during the European GNSS Agency (GSA) eCall test campaign. The campaign aims to pre-test eCall in-vehicle modules and evaluate their compatibility with the positioning services provided by Galileo and the European Geostationary Navigation Overlay Service (EGNOS) in accordance with the test procedures established by the regulation.
As the eCall initiative goes live this month, the GSA launched a test initiative to support eCall device manufacturers in their preparation for type approval. In safety-critical situations, eCall must be as accurate as possible, so defining and conducting proper test procedures is imperative.
Spirent is cooperating with the JRC to develop its own eCall test solution. “Working with JRC enabled us to develop better tests to verify that eCall devices are working properly,” said Steve Hickling, product director for Spirent’s positioning business.
When a collision occurs, an eCall-equipped car automatically calls the nearest emergency centre. Even if no passenger is able to speak – such as because of injuries — a “minimum set of data” is sent, which includes the exact location of the crash site. eCall is expected to significantly reduce emergency service response times, leading to lives saved and injuries reduced.
The JRC used a Spirent GSS9000 simulator to assess eCall devices’s capability to support the reception and processing of the Galileo and EGNOS signals. Using feedback from the JRC, Spirent has developed an eCall Test Suite for its automation solution, PT TestBench.
Tested with various eCall devices, the eCall Test Suite is available for eCall device manufacturers and include, among others, positioning accuracy, time to first fix, GNSS receiver sensitivity and reacquisition performance.
Swift Navigation has released Skylark, a cloud-based GNSS corrections service delivering centimeter-level accuracy without deploying and maintaining a GNSS network. Skylark targets autonomy applications at scale and enables high-precision positioning for mass market automotive and autonomous vehicle applications.
Skylark works with both of Swift’s multi-band, multi-constellation GNSS receivers, the Piksi Multi and the Duro ruggedized industrial receiver. Swift added GLONASS support in its 1.4 firmware upgrade, announced earlier this month, and aims to include Galileo and BeiDou in the near future.
Previously known as a hardware company, Swift Navigation appears to be shifting its focus a bit, including an Internet-delivered service in addition to its GNSS receivers. It has recently focused more closely on the automotive sector; it also has customers in drone technology, robotics and precision agriculture.
Its new platform for high-precision GNSS navigation of autonomous vehicles, via Internet connectivity, Skylark delivers fast convergence times measured in seconds, using positioning algorithms to provide a continuous stream of data to individual devices from the cloud. The data stream allows for quick and robust positioning and high reliability and availability, even in challenging environments, according to the company.
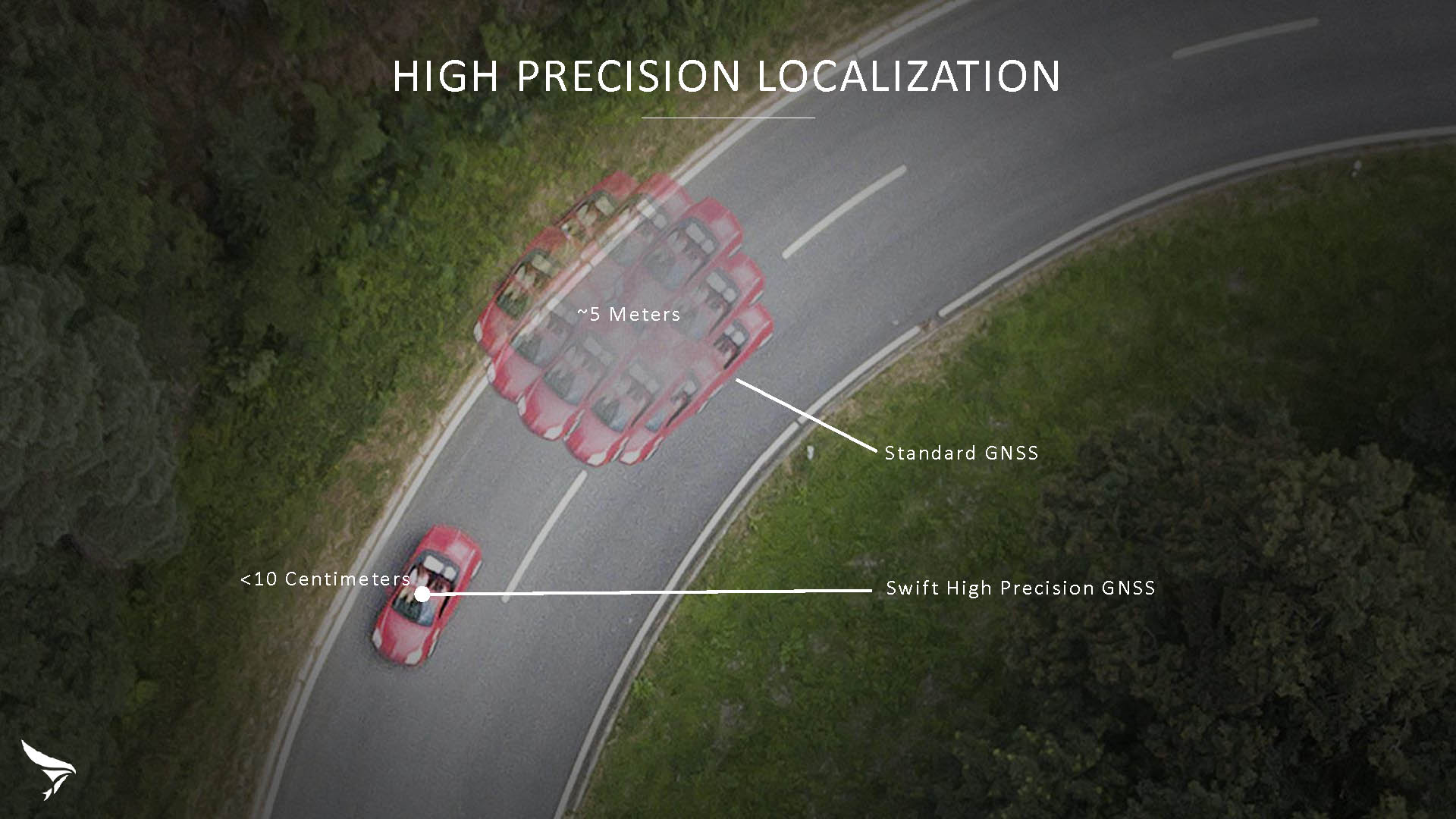
The Skylark service offers accuracy at the centimeter level. (Image: Swift Navigation)
Critical requirements for real-time absolute localization through GNSS for the automotive sector, according to Fergus Noble, co-founder and CTO of Swift Navigation, are:
high accuracy; centimeter level
availability; fast convergence, measured in seconds
integrity
scalability to support a large vehicle population
low cost.
Internet-Delivered via Cell Network
The last two requirements are fulfilled by the cloud-based approach. He characterized Skylark as a hybrid of RTK (Real Time Kinematics) and PPP (Precise Point Positioning) approaches augmented by Swift’s intellectual property, with corrections delivered over the Internet as provided by the cellular network, which he described as “robust to outages.” Cell coverage along road networks is good, Noble asserted, and 5G applications are increasing that coverage and will further enable connected vehicles. Automotive OEMs are comfortable with the level of cell coverage for this application, according to him. There has been testing to show robustness in most rural areas, and network operators are dedicated to increasing this.
“Skylark operates like a utility,” said Noble. “It is a simple, low-cost Internet data stream that provides customers with a complete high-integrity GNSS solution. Simply supply a Swift receiver with power and Internet connectivity and get real-time corrections for highly-dynamic GNSS applications.”
To realize the Skylark service, the company hired a team of cloud-based engineering experts who had a role in building Amazon and Oracle critical infrastructure. Swift Navigation is initially launching only with its own devices, but is making the service publicly-available for any customer in any vertical requiring precise positioning. “Every car company is building in autonomous functionality,” noted Noble, making clear who the company is ultimately targeting.
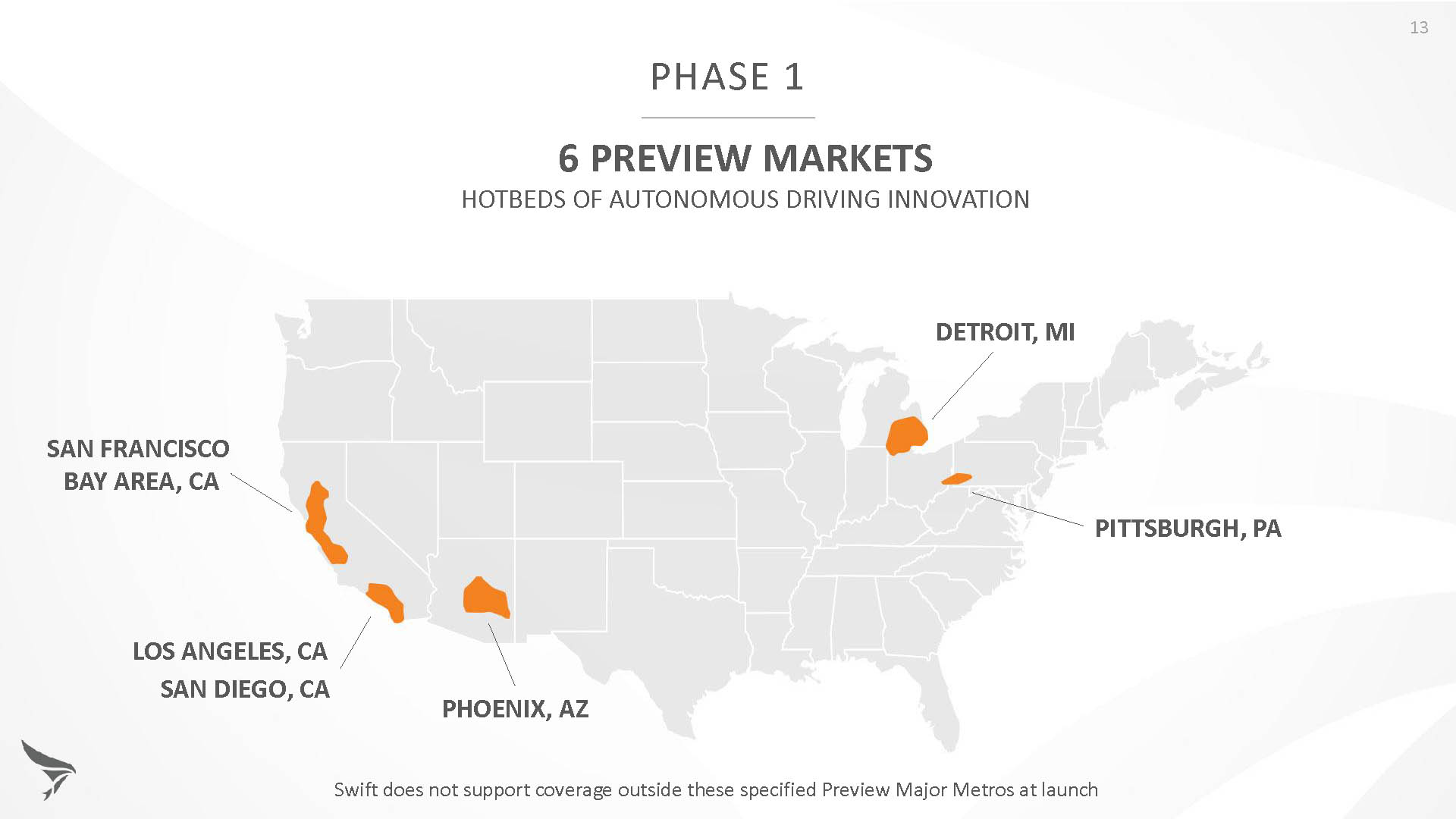
Skylark is currently offered in six metropolitan markets. (Image: Swift Navigation)
Swift has been working with beta customers for more than a year and is now previewing the service to all customers in six metropolitan markets: the San Francisco Bay Area, Los Angeles, San Diego, Phoenix, Pittsburgh and Detroit. The company envisions full contiguous U.S. and ultimately global expansion. Customers in preview areas with Swift receivers can sign up for Skylark and immediately start receiving corrections.
The service maintains low bandwidth to save on data costs and is offered with a free 30 day trial and flexible pricing plans. Skylark’s pricing structure includes a monthly plan and an annual plan. Enterprise pricing is available for volume orders.
Voyage Self-Driving Car Active Service and Coming Expansion
An early beta user of the service, Voyage deploys self-driving taxis in private communities across North America. “Skylark and Piksi Multi are working safely and efficiently in a real-world application today at The Villages, a retirement community in San Jose, California,” said Oliver Cameron, co-founder & CEO of Voyage.
Voyage incorporates Skylark GNSS corrections in controlled road networks in private communities. (Image: Swift Navigation)
Voyage’s passenger cars carry a roof-racked suite of sensors: the Swift Navigation Piksi Multi GNSS receiver, LiDAR, cameras, radar, and an inertial measurement unit. A computer in the trunk integrates all sensor signals and uses the car’s CAN bus to operate steering, braking, and other functions. An operator sits behind the wheel at all times, sometimes with a co-pilot: one to watch the road ahead, and one to watch the software. “Safety is our first priority,” said Cameron.
The service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. (Image: Swift Navigation)
The Voyage fleet stays within the bounds of a given community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in metropolitan cities. The first in the San Jose area serves private community of more than 4,000 residents, with a 15-mile road network. Today, residents are able to summon a Voyage self-driving taxi using a smartphone app and have a ride waiting at their front door. This service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. Voyage takes residents of The Villages to and from the gym, to visit with friends, to the golf course and to community center events.
Image: Swift Navigation
Voyage will next deploy the Swift product suite in its upcoming deployment launching to 160,000 retirees at The Villages complex in Florida, over a road network of 750 miles. It is currently in a “Q/A” testing phase on that site, working the technology and the local mapping through their paces.
Taoglas, a provider of IoT and automotive antenna and RF solutions, has introduced its patent-pending Terrablast range of antennas.
The Taoglas Terrablast antenna line is designed for UAVs and transportation. (Photo: Taoglas)
The polymer-based patch antennas are 30 percent lighter than their ceramic counterparts and extremely resistant to fracture upon impact. Terrablast antennas are designed for the automotive and unmanned aerial vehicle (UAV) markets, where impacts are possible but antenna performance cannot be compromised.
Unlike traditional patch antennas, which are ceramic, Terrablast uses a new class of Taoglas polymer dielectric material composed of glass-reinforced epoxy laminate. The addition of the polymer to the blend makes the antenna extremely lightweight, yet impact resistant, the company said.
The Terrablast antennas are designed to withstand drops, falls and impacts, and are designed for applications such as UAVs, where the antenna’s mechanical robustness following potential impact is critical.
The Terrablast patch antennas are also typically 30-35 percent lighter than traditional patches. In drone applications, where weight over battery life is critical — each gram reduced enhances battery life.
“Taoglas is leading the charge in material science advancement for the antenna industry, and our new Terrablast antennas are the latest innovation we’re introducing to the market,” said Ronan Quinlan, co-CEO and co-founder of Taoglas. “A variety of industries and applications, especially the automotive and drone markets, will benefit from Terrablast’s high-performance capabilities in a lightweight, impact-resistant form factor.”
The first antennas in the Terrablast range are a 25-mm embedded 2.4 GHz patch antenna and a 35-mm embedded GPS patch antenna. The circular polarized design of the 2.4-GHz patch ensures maximum performance for constantly moving mobile applications where the orientation to the transmitter or receiver frequently changes. The antenna weighs 5.6 grams compared to an equivalent ceramic patch of 8.5 grams, providing a weight-saving substitute for ceramic patches in UAV applications.
The 35-mm GPS/GLONASS/BeiDou patch antenna has extremely high efficiency of more than 70 percent across all bands, improving time to first fix. At 10 grams, the 3.5-mm-thick patch is 5.5 grams lighter than typical ceramic GNSS patches.
All Terrablast antennas undergo rigorous temperature, vibration and impact tests, exceed the highest ISO 16750 standards, and are manufactured in Taoglas’ purpose-built facilities in Taiwan and the United States.
SBG Systems has released the Ellipse 2 Micro series, a new product range designed to reduce the size and cost of high-performance inertial sensors for volume projects. The Ellipse 2 Micro series is available as an inertial measurement unit (IMU), or as an attitude and heading reference system (AHRS) or inertial navigation system (INS) running an extended Kalman filter.
The new Ellipse 2 Micro is available as an IMU for calibrated sensor data, or as an AHRS/INS delivering accurate orientation and navigation using an external GNSS receiver.
The Ellipse 2 Micro series provides excellent navigation data when connected to an external GNSS receiver. The INS fuses in real-time inertial and GNSS information to maintain the vehicle position in air, marine or land applications. For automotive projects, the inertial sensor comes with CAN protocol and connects to the odometer for higher performance in harsh environments, such as tunnels and urban canyons.
“With the Ellipse 2 Micro, integrators benefit from SBG Systems high expertise in motion sensing and positioning in the smallest package,” said Alexis Guinamard, CTO of SBG Systems.
The high-quality micro IMU is calibrated from -40 degrees to 85 degrees Celsius. Combining state-of-the-art MEMS-based gyroscopes, accelerometers and magnetometers, the new Ellipse 2 Micro series is fully calibrated in temperature to eliminate measurement errors such as sensor bias, gain, linearity, alignment and g-sensitivity to provide a constant behavior in all conditions.
Weighing 10 grams, the Ellipse 2 Micros provide a 0.1 degree accurate attitude and connects to external GNSS for navigation, offering a remarkable weight/performance ratio to integrators.
All Ellipse 2 Micro models are now available for order. Product and pricing information is available from SBG Systems representatives and authorized dealers.
u‑blox is offering the automotive-grade MAX‑M8Q‑01A GNSS module, which measures 9.7 x 10.1 x 2.5 millimeters and has an operating temperature range from –40 degrees Celsius to 105 degrees Celsius.
The MAX‑M8Q is the company’s third automotive-grade GNSS module to date, alongside the NEO‑M8Q‑01A and NEO‑M8L‑03A modules.
MAX‑M8Q‑01A is designed to meet the stringent requirements of the automotive market, providing superior positioning accuracy even in challenging environments such as urban canyons. Its extended temperature range ensures reliable performance even in harsh environments, e.g. when mounted in a car‑roof antenna.
Produced in adherence to the u‑blox 0 ppm program, which aims to bring down product failures rates to zero and consistently achieve high production quality, the module is delivered with the automotive industry’s standard PPAP documentation to ensure compliance with customer requirements.
The module offers product developers a reduction of design and qualification time and effort, shortening time‑to‑market and considerably reducing risks for new product development.
“We developed this automotive grade GNSS module in the small MAX form factor in response to customer requests for a GNSS receiver that operates reliably in an extended temperature range,” said Franck Berny, senior principal, automotive market development, u-blox. “We are confident that the module’s high quality, robust and secure performance, and small form factor will appeal to the automotive industry at large.”
A free Cognizant Autonomous Systems for Safety Critical Applications (CASSCA) Workshop will be held 8:30 a.m.-5:30 p.m. on Jan. 29 at the Hyatt Regency Reston in Reston, Virginia. This is scheduled to take place the day before and at the same location as the Institute of Navigation’s International Technical Meeting and Precise Time & Time Interval Systems and Applications (ION ITM/PTTI) 2018 conference.
The workshop consists of a full day of presentations and discussions on the opportunities and challenges associated with developing fully autonomous systems that are cognizant and trustworthy for safety-critical applications by leading experts in the field. Speakers include:
David Corman, Program Manager, Cyber-Physical Systems Program; National Science Foundation (NSF). Dr. Corman’s current research interests are in the field of Cyber Physical Systems (CPS), security for CPS, unmanned systems, manufacturing, and technologies supporting Smart and Connected Communities.
Paul DeBitetto, Vice President, Software Engineering; Top Flight Technologies. Dr. DeBitetto leads all Top Flight’s Software and Embedded Systems Development. That includes product-related flight control, simulation, computing, sensing, data communications, security-related controls and software solutions.
Finch Fulton, Deputy Assistant Secretary for Transportation Policy; Department of Transportation (DOT)
Joao Hespanha, Professor and Chair of Department of Electrical and Computer Engineering; University of California, Santa Barbara. His current research interests include hybrid and switched systems; multi-agent control systems; distributed control over communication networks (also known as networked control systems); the use of vision in feedback control; stochastic modeling in biology; and network security.
Robert Peterson, Professor and Director of Center for Insurance Law and Regulation; Santa Clara University.
Mr. Peterson teaches torts, insurance law and regulation, evidence and products liability, and other courses. He is a past chair of the California State Bar Standing Committee on Insurance Law, and is director of the Law School’s Center for Insurance Law and Regulation.
Signe Redfield, Roboticist and Mission Manager; Naval Research Laboratory (NRL). Dr. Redfield’s primary interests include performance evaluation of autonomous systems, foundations of robotics, and cooperative behaviors for autonomous underwater vehicles.
Giorgio Rizzoni, Professor and Director of Center for Automotive Research (CAR); The Ohio State University. The CAR is an interdisciplinary university research center that conducts research on advanced automotive and transportation technologies and systems engineering, focusing on sustainable mobility, advanced propulsion systems, human safety and the environment.
Steven Rogers, Senior Scientist for Automatic Target Recognition and Sensor Fusion; Air Force Research Laboratory (AFRL). Dr. Rogers serves as the principal scientific authority and independent researcher in the field of multi-sensor automatic target recognition and sensor fusion.
Registration is also now open for the ION International Technical Meeting (ITM) and Precise Time and Time Interval Systems Applications Meeting (PTTI), which begin the next day (January 30-February 1) at the same location. See www.ion.org/itm for more information.
Enabling the future of autonomous transportation by significantly reducing product development time is the shared goal of three presentations to be made on Thursday, Nov. 30 in a free webinar, “High Accuracy for Autonomous Driving.”
The speakers will show how they employ post-processing software to generate accurate and reliable ground reference solutions in vehicle testing. The software enables evaluating potential sensor suites, benchmarking solutions, and generating high-definition maps.
Post-processing the data from autonomous vehicle tests under varying environmental conditions that mirror real-world situations can mitigate GNSS error sources (satellite clock & orbital error, and ionospheric & tropospheric delay); establish an ultra-precise ground truth reference for testing; compare and contrast different sensor packages tested onboard the vehicle; produce customized data formats for exporting information; compare real-time and post-processed quality; transform and translate data between different locations and reference frames; and revisit tests through export to Google Earth. The speakers will show how post-processing forward and back can lead to as much as 40 percent data accuracy improvement.
The software package, Inertial Explorer, offers this capability, whether lower-grade or high-end inertial sensors are employed.
Steven Waslander, associate professor at the University of Waterloo, heads a project collecting 1,000 km of data in all-weather conditions for a new public road driving dataset focused on autonomous driving challenges. He directs the Waterloo Autonomous Vehicle Laboratory (WAVELab), extending the state of the art in autonomous drones and autonomous driving through advances in localization and mapping, object detection and tracking, integrated planning and control methods and multi-robot coordination.
Terry Lamprecht, director of products at AutonomouStuff, a supplier of components, services and software that enable autonomy, will discuss verifying proper installation, and creating a baseline data set to benchmark against data collected on autonomous vehicles in real-time.
Natasha Wong Ken, product manager at Waypoint, will give a high-level technical overview of post-processing techniques and settings, including forward and reverse processing, tightly vs. loosely coupled, PPP vs. differential, and more.
Registration for the November 30 webinar is free. For those not able to attend the live broadcast, all audio and presentation slide components can be downloaded after air date for viewing at convenience.