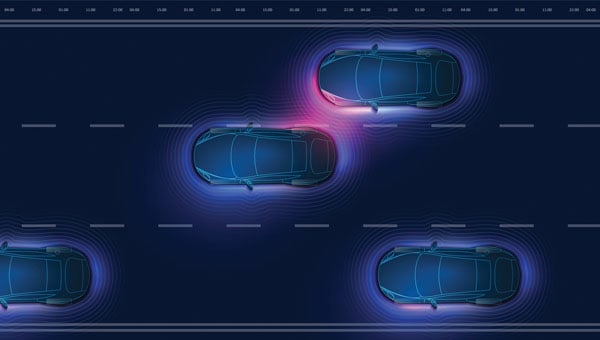
The term “urban canyon” was inspired by New York’s Canyon of Heroes — a stretch of Lower Broadway where tall buildings line the streets similar to a canyoenn. These human-built canyons can confuse GNSS receivers making it hard to accurately calculate a vehicle’s position. For autonomous cars, that’s not just inconvenient — it’s a major safety issue. However, with the right technology, the automotive world can “close’” these urban canyons, explains Manuel Del Castillo, vice president of business development at Focal Point Positioning.
On open roads with a clear view of the sky, satellite navigation can be remarkably accurate. Signals from multiple GNSS constellations reach the vehicle’s receiver unimpeded, helping calculate position with impressive accuracy. However, this often isn’t the case in dense urban areas.
Tall glass buildings, narrow streets, concrete bridges and overpasses all form urban canyons — and can be a barrier to even the most sophisticated navigation systems.
The Challenge
In cities and other urban environments, there are two common challenges for GNSS performance. The first is multipath interference, which occurs when signals bounce off buildings, glass façades and even parked cars before reaching the receiver. Rather than receiving one clean signal from the satellite, the receiver gets a clean signal and several delayed copies, leading to erroneous positioning estimates.
Signal occlusion is another issue, which occurs when tall buildings and structures physically block some satellite signals from view. The signals that are actually received from that satellite are reflections. This makes it difficult for the receiver to lock onto a stable fix.
In practice, both issues can cause sudden anomalies — enough to place a car on the wrong street entirely. For drivers, this is frustrating. For autonomous systems, it’s a safety risk.
The Road to Autonomy
Urban GNSS challenges aren’t new — taxi drivers in London and New York have long experienced their navigation systems getting “lost” among the towers. However, positioning accuracy is now more important than ever as automotive technology evolves and we hand over more control to our vehicles.
Advanced driver assistance systems (ADAS) are now pushing the limits of conventional GNSS. Features such as lane-keeping, automated lane changes and intelligent speed adaptation all rely on knowing the vehicle’s exact position – not just the road it’s on, but which lane.
As we move further towards autonomous driving, the stakes will be even higher. If GNSS references are unreliable, this could cause serious errors on the road. A sudden position jump in the middle of a complex urban manoeuvre is more than inconvenient — it’s dangerous.
Closing the Canyon
If autonomous cars are to drive safely and reliably in urban environments, GNSS must evolve. The answer lies in rethinking how satellite signals are processed — and in tackling the root causes of error. Traditional receivers rely heavily on hardware-based processing, meaning they integrate new technologies at a slow pace.
To help overcome this challenge, we developed S-GNSS Auto — software that enhances GNSS receiver reliability and accuracy in autonomous vehicles. Delivered as a simple firmware upgrade, it transforms GNSS into a more powerful component of the ADAS stack in areas where traditional solutions fall short.
We recently integrated S-GNSS Auto onto STMicroelectronics’ Teseo GNSS devices, and tested the impact of the joint solution in some of the most challenging urban environments: Shinjuku in Tokyo, and Frankfurt and the Black Forest in Germany. The combined solution demonstrated an improvement in measurement accuracy by up to four times and position accuracy by up to three times in the challenging sections of these environments. By ignoring reflected or non-line-of-sight signals, S-GNSS Auto can also reject potential spoofing attacks, enhancing the security of the GNSS receiver.
McKinsey reports that 12% to 20% of cars could have advanced autonomous driving capabilities by 2030. For automakers, this means expanding the roads and environments that can safely support these capabilities. S-GNSS® Auto helps make that possible by improving GNSS reliability and laying the foundation for advanced vehicle-to-everything (V2X) and ADAS technologies needed to support autonomous vehicle safety in challenging urban areas. Working directly from the chip, it provides a cost-effective and accessible way for automotive OEMs to upgrade their technology via a firmware upgrade.
To see the impact of the integrated S-GNSS Auto and Teseo solution, download the latest data from our trials in Japan and Germany here.
This article is contributed by Focal Point Positioning.
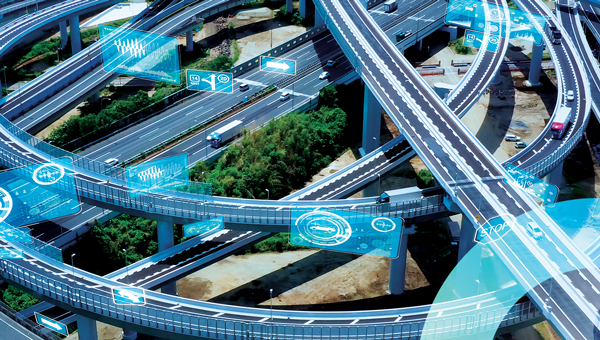
Each day, millions of transportation decisions are made without a driver manually choosing a route or reacting to road signs. Trucks are rerouted around traffic hours before a jam appears. A vehicle slows down in a school zone, even without seeing a sign. A delivery service dynamically dispatches drivers based on weather and wait times.
These are not just conveniences; they are outcomes of location intelligence working behind the scenes, powered by artificial intelligence (AI) and real-time mapping.
At the heart of these systems lies a fundamental shift: maps are no longer static guides for humans. AI is unlocking a new era of computing and autonomous systems that will drive industry innovation and reinvention for years to come. Maps have become live, machine-readable software that enables automation at scale. Accenture’s Technology Vision 2025 report found large-language models (LLMs) are giving machines and robots more autonomy in the physical world, allowing them to better understand the physics of their environments, have spatial awareness, interact with people and understand complex instructions. This evolving autonomy is critical for autonomous vehicles, smart logistics and other systems that rely on real-time, AI-powered mapping to sense, decide and act.
Whether it’s advanced driver assistance systems (ADAS), predictive logistics, EV range optimization or smart city operations, AI-powered mapping is fast becoming the connective tissue between sensing, decision-making, and action. It all begins with location data that is collected, interpreted and delivered in real time.
From Navigation to Infrastructure: The Evolution of the Map
Throughout the past two decades, digital maps have evolved from a novelty to a necessity. The early wave of turn-by-turn GPS tools was designed for humans — to get us from one point to another using the shortest or fastest route.
Today, we are witnessing a new paradigm. As autonomy becomes embedded in vehicles, delivery operations, and mobile robotics, we need a new kind of map — one built for machines.
These maps must be able to see, react and even predict. They must be continuously updated with real-time inputs, capable of interpreting events and structured in a way that allows for automation logic. In other words, they must be intelligent; and that intelligence comes from AI.
AI-Powered Maps: What Makes Them Different?
A live, AI-powered map is far more than a digital representation of roads and intersections. It begins with a foundational base layer — detailed information about road geometry, lanes, speed limits, signage and more. However, what sets these maps apart is how they evolve in real-time to reflect the dynamic nature of the world around us.
They incorporate constantly changing inputs like traffic flow, construction activity, road closures and weather conditions — data streams that traditional static maps cannot accommodate. Beyond reacting to real-time events, AI maps also understand context. They may recognize nuances such as school zones that change by time of day, hazardous intersections, low-clearance bridges, and the availability or compatibility of EV chargers at nearby locations.
Crucially, AI-powered maps don’t just describe what’s happening – they anticipate what might happen next. Fueled by billions of data points collected from vehicles, sensors, satellite imagery and crowdsourced sources, these systems use predictive modeling to foresee traffic build-ups, potential hazards or shifts in road accessibility.
The result is a map that doesn’t merely guide but thinks — a constantly updating model of the world designed not for human eyes alone, but for machines that need to make decisions in real-time.
AI fuses these elements, constantly recalculating and enriching the map to reflect what’s happening now and what might happen next.
For this to work, mapping platforms must ingest the billions of data inputs. AI models then validate, filter and extract insight from this data — turning raw input into actionable intelligence and guidance.
Why AI Maps Matter in the Vehicle
Modern vehicles are increasingly defined by software, and that software needs a constant, reliable connection to the outside world.
ADAS features, such as intelligent speed assistance (ISA), lane keeping and predictive cruise control, depend not only on sensors like cameras or radar, but also on high-quality map data to anticipate what’s ahead.
For example, speed limit detection based solely on onboard vision can fail in poor weather or when signs are obscured. But when paired with verified, map-based data, continuously updated by AI, vehicles can make safer, more consistent decisions. As regulators in the EU and beyond mandate ISA systems in new vehicles, AI-enhanced maps are becoming a tool for regulatory compliance, not just convenience.
As OEMs continue their shift toward software-defined vehicles (SDVs), they increasingly treat maps as a core software module, critical to the operation of the vehicle itself, not just a navigation layer.
In the era of SDVs, maps are evolving into a foundational software service used not just to get somewhere, but to determine how and when it is safe to drive.
How AI Maps Support the EV Transition
One of the most significant barriers to widespread EV adoption is range anxiety: the fear that a driver won’t reach a charger in time, or that the charger will be in use or out of order. AI-powered maps help directly address this.
By combining real-time charger availability, plug compatibility, dynamic traffic conditions, topography, and vehicle battery status, intelligent routing systems can not only suggest optimal charging points, but also reroute on the fly as conditions change.
This level of intelligence is essential for EV fleet operators, especially those in logistics, ride-hailing or municipal transit.
AI-powered maps also leverage charger usage patterns, traffic flows and gaps in the network to help cities plan where to place new charging infrastructure.
In this way, location intelligence doesn’t just support EVs on the road but helps accelerate adoption.
Why AI Maps Matter in the Supply Chain
A HERE Technologies ‘On the Move’ survey found only 25% of transportation and logistics professionals are leveraging AI in supply chain management. Yet, the use cases for AI-powered mapping are plentiful.
Fleet operators face daily challenges: delays, emissions targets, labor shortages and delivery windows that shift by the hour. They’re actively seeking technology-based solutions. McKinsey projects the autonomous heavy-duty trucking market could reach an aggregated $616 billion in 2035 in China, the United States and Europe.
AI-powered maps help address many of these challenges. By combining real-time traffic information, road restrictions (e.g., weight limits, low bridges), and predictive analytics, intelligent maps help logistics operators optimize every mile.
For example, dynamic routing can avoid areas of congestion hours before they peak, based on machine learning models trained on historical and live data. AI can prioritize delivery orders based on customer availability, time-of-day restrictions or weather disruptions.
Beyond routing, maps also assist in asset tracking and risk management. Telematics systems that combine GNSS positioning with AI-based location intelligence can detect anomalies in driving behavior, flag out-of-route events and improve operational safety.
The results are evident and tangible: lower fuel consumption, reduced delivery times and higher fleet utilization.
GNSS and Geospatial Foundations
It’s important to underscore that these intelligent maps still depend on foundational technologies like GNSS. Without reliable satellite-based positioning, none of these applications (ADAS, EV routing or predictive logistics) would be possible.
But GNSS alone isn’t enough. Real-time location must be contextualized. An accurate lat/long fix is powerful, but the system needs to know: What road is that on? What’s the speed limit? Are there known hazards? What time of day is it? Is it raining?
This is where geospatial data, fused with AI and layered into live maps, becomes transformational. The future isn’t about replacing GNSS — it’s about expanding what’s possible when GNSS is augmented with AI, context and prediction.
Looking Ahead: Mapping as Mission-Critical Infrastructure
As autonomy increases across industries — from fully autonomous vehicles to self-driving delivery trucks to smart city systems — AI-powered maps will underpin critical operations.
AI-powered maps will be essential to the flow of goods, the safety of passengers and the predictability of city infrastructure. These systems must be continuously updated, machine-readable, context-aware, predictive and scalable. They also must be built with privacy, security and compatibility in mind. Governments, automotive manufacturers, technology providers and mapping platforms will need to collaborate — not just on data collection, but on standards, governance and interoperability.
Quiet Engine of Autonomy
We often focus on the visible outputs of automation: the driverless shuttle, the drone delivery, the smart traffic signal. However, none of these can function without a live map underneath, enabling every decision, in every moment.
Digital maps have become the quiet engine of autonomy. With the power of AI, they’re becoming smarter, faster and more essential every day.
For professionals in GNSS, geospatial intelligence, and positioning systems, this shift opens new territory where location isn’t just about where things are, but also about what’s happening, why it matters and what should happen next.
In this world, AI-powered maps are no longer a tool. They’re infrastructure.
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focus on high-accuracy positioning for autonomous vehicles in various environments. The papers are available here.
High-accuracy and resilient GNSS receiver for autonomous vehicles
The G3STAR GNSS receiver, a key component of the GAMMS Horizon 2020 project, is designed to improve high-definition navigation map production for autonomous vehicles. This Galileo-based receiver leverages the constellation’s Open Service features, including the High Accuracy Service (HAS) and Navigation Message Authentication (OSNMA). The research team shared that G3STAR’s ability to obtain and decode HAS messages from Galileo E6-B signals, as well as to process OSNMA bits from live Galileo E1-B I/NAV messages, demonstrates its advanced capabilities in providing secure and precise navigation data.
Preliminary tests highlight G3STAR’s proficiency in utilizing Galileo’s new services. However, the research team shared that further evaluation is necessary to fully assess its impact within the GAMMS project. Plans include validating the HAS data’s effect on navigation accuracy, conducting field tests to evaluate OSNMA availability in various environments and assessing the influence of the Chip Scale Atomic Clock on receiver performance. Additionally, comparing the G3STAR’s performance to commercial off-the-shelf receivers will be crucial in determining its overall contribution to the GAMMS navigation system and HD map generation. These evaluations will be carried out during upcoming test campaigns, providing valuable insights into G3STAR’s potential to advance autonomous vehicle navigation.
Filipe Carvalho, Ricardo Prata, Bruno Cardeira, Carlota Cardoso, Rui Nunes and António Fernández; “High-Accuracy and Resilient GNSS Receiver for an Autonomous Vehicle.”
GNSS/INS positioning software library
The autonomous vehicle industry has seen significant interest and investment throughout the past 15 years, with numerous practical applications emerging in the market. However, the technology for functionally safe GNSS/INS localization in autonomous vehicles is still not fully established. This gap is particularly crucial in safety-critical applications, where positioning algorithms must be robust against potential faults, especially in challenging environments. This paper highlights Hexagon’s Safety-Critical Positioning Solution, which addresses this need by providing both precision and safety for autonomous land vehicles.
The Positioning System is a safety-first software library that integrates GNSS signals, state space corrections from the TerraStar-X Enterprise service, inertial measurement units (IMUs) and additional vehicle sensors. This system employs an extension of Receiver Autonomous Integrity Monitoring techniques, originally developed for the aviation industry. It computes multiple navigation solutions using a solution separation technique, including an “all-in-view” solution and several subset solutions that exclude various fault hypotheses. These solutions are used to calculate Protection Levels (PLs), which provide an estimated upper bound on positioning errors, accounting for systematic biases and measurement faults. The PLs can be compared against alert limits to determine whether the navigation solution is sufficiently accurate for autonomous decision-making.
Eduardo Infante, Rudi Gaum and Laura Norman; “Demonstration of a Functionally Safe GNSS/INS Positioning Software Library for Autonomous Land Vehicles.”
Unmanned ground vehicles in off-road environments
This paper explores the emerging potential of radar for localization in GNSS-denied scenarios, particularly in challenging off-road environments where lidar-based systems struggle. The research focuses on two distinct settings: a dense forest and an underground mine. To address the localization challenges in these environments, the team developed a pipeline that combines an adaptive extended Kalman filter (EKF) for unstructured forested regions with a factor graph approach that fuses EKF estimates and point-to-plane radar iterative closest point (ICP) measurements for structured underground environments. The results demonstrate significant improvements in localization accuracy compared to existing methods, with the adaptive EKF proving particularly effective in forested areas.
The study provides valuable insights into the integration of radar and IMU data for vehicle localization in GPS-denied scenarios. While the adaptive EKF outperformed conventional EKF in structured outdoor settings, the standard EKF showed better performance in the highly dynamic conditions of the underground mine. The factor graph approach exhibited improved tracking performance, especially in reducing lateral drift along straight trajectory segments. The research also highlights the importance of selecting high-quality ICP registrations for radar-based SLAM. These findings pave the way for future research directions, including refining adaptive EKF for varied environments, exploring radar-based navigation on feature-sparse roads and enhancing the factor graph framework to incorporate additional sensor modalities.
Petar Mitrev and Mohamed Atia, “Radar-Inertial Localization for Unmanned Ground Vehicles in GNSS-Denied Off-Road Environments.”
GNSS plays a vital role in autonomous systems, providing essential positioning, velocity and timing (PVT) information for platforms such as autonomous vehicles, UAVs and ships. However, GNSS vulnerability to spoofing attacks poses significant security risks, potentially disrupting decision-making processes in these systems. To address this issue, researchers have developed a novel approach called Clock Drift Monitoring (CDM) for detecting GNSS spoofing in autonomous vehicles. Unlike previous methods that focused on directly detecting Doppler bias from measurements, CDM indirectly monitors the adverse impact of Doppler bias on the PVT solution, overcoming challenges associated with bias extraction from raw measurements.
The CDM technique exploits user clock drift derived from Doppler positioning as a detection metric. Under normal conditions with authentic GNSS signals, the clock drift remains stable, reflecting the user’s frequency source stability. However, spoofing conditions introduce counterfeit signals with consistent Doppler bias across all measurements, resulting in abnormal clock drift variations. A Generalized Likelihood Ratio Test-based detector identifies these variations, offering a practical and flexible method for GNSS spoofing detection. Field tests have validated the CDM technique’s effectiveness in real-world scenarios, demonstrating its robustness as a solution for autonomous vehicles to counter emerging cyber threats. This method’s ease of implementation, broader applicability and inherent robustness make it a promising approach for safeguarding autonomous systems against counterfeit GNSS signals.
Ziheng Zhou, Hong Li, Yimin Deng and Mingquan Lu Tsinghua; “Clock Drift Monitoring Based GNSS Spoofing Detection Method for Autonomous Vehicles.”
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Waymo opens autonomous rides in LA
Photo: Waymo
Waymo has launched its fully autonomous ride-hailing service in Los Angeles, available 24/7, following a waitlist of nearly 300,000 users before its rollout. The service covers nearly 80 square miles of Los Angeles County, including Santa Monica, Hollywood Boulevard and the University of Southern California. Waymo plans to expand its coverage as it scales its operations.
A large UAV show in Quanzhou, Fujian Province, China, ended in disaster when hundreds of UAVs crashed due to GNSS jamming. The event, intended to celebrate the city’s history with 2,000 UAVs equipped with low-altitude fireworks, faced significant disruptions when a camera drone entered the area without notifying authorities, leading them to mistakenly jam the signal. This incident resulted in an estimated loss of more than 10 million yuan ($1.4 million)
ISPRA project unveils coastal habitats of Italy
Photo: ISPRA
The PNRR MER A16-A18 project, led by the Italian Institute for Environmental Protection and Research (ISPRA), has released its first preliminary data for mapping Italian coastal habitats through the WebGIS Virgeo cartographic platform. The project focuses on mapping the growth of the Posidonia oceanica and Cymodocea nodosa meadows, which are crucial for biodiversity. Using high-resolution satellite imagery, lidar sensors and autonomous unmanned vehicles, the project is creating a comprehensive database for marine coastal ecosystem management and protection.
Celestial navigation system for UAVs
Photo: Cpl. Harrison Rakhshani
Researchers at the University of South Australia have developed a celestial navigation system for UAVs. The new system combines visual observations of the stars with standard autopilot technologies. In tests of the system using a fixed-wing UAV, researchers could pinpoint its position within 2.5 miles. This technology can be deployed by UAVs in GPS-compromised or denied areas by eliminating the need for GPS.
The automotive navigation of tomorrow is highly connected and capable of dynamically using high-resolution map information and vehicle and environmental data from the cloud. It is an enabler for powerful driver assistance, intelligent e-mobility and autonomous driving. As a global provider of software engineering services for the mobility industry, Intellias is involved in many of these developments.
Although obtaining mapping and navigation data is easier today than it was 10 years ago — thanks to dashcams, UAVs and satellites — collecting this data is still labor-intensive. Even if most corners of the world are already recorded in public and private geographic information systems (GIS), the maps still need to be maintained regularly. Data accuracy and timeliness are the two biggest challenges in the mobility industry, followed by coverage, as the physical world is constantly evolving. To meet these requirements, the evolution of navigation and digital mapping is gathering pace. The following six technology and deployment trends will drive automotive mapping and navigation in the coming years.
1. Enriching Mapping Data With AI
Satellite imagery was a breakthrough for map creation. The wrinkle, however, is that most mapping software cannot work directly with satellite photos. Visual data first needs to be codified into comprehensive navigation datasets in a suitable format such as the Navigation Data Standard (NDS). Then map owners must keep it up to date. Both processes are costly and labor-intensive, making them great use cases for artificial intelligence (AI) in mapping.
AI algorithms improve the speed and precision of digital map building by offering the ability to update maps more regularly and map new areas faster. They can classify objects in satellite images — buildings, roads, vegetation — to create enriched 2D digital maps as well as multi-layer 3D map models. With precise maps, you can delight users with better ETAs, detailed fuel or energy usage estimates, and richer point-of-interest information.
Apart from facilitating the collection of mapping data, AI can also help with generating such data. Researchers from MIT and the Qatar Computing Research Institute (QCRI) recently released RoadTagger. This neural network can automatically predict the road type (residential or highway) and number of lanes even with visual obstructions present, such as a tree or building. The model was tested on occluded roads from digital maps of 20 U.S. cities. It correctly predicted the number of lanes with 77% accuracy and predicted road types with 93% accuracy.
That said, sensor data collection from connected vehicles isn’t going anywhere. OEMs are increasingly relying on their fleets to collect new insights for digital map creation, and this process is becoming easier with advances in machine learning. HERE Technologies recently presented UniMap — a new AI-driven technology for faster sensor data processing and map creation. The new solution can effectively extract map features in 2D and 3D formats, then combine them with earlier map versions. This unified map content data model allows new digital maps to be available in 24 hours.
Photo: Intellias
2. NDS.Live: From offline databases to distributed map data systems
Conventional onboard navigation systems are designed, developed and integrated with proprietary databases, which become obsolete with every new product generation. NDS.Live is the new global standard for map data in the automotive ecosystem, promoting the transition from offline to hybrid/online navigation. It minimizes the complexities of supporting different data models, storage formats, interfaces and protocols with one flexible specification. NDS.Live is not a database, but a distributed map data system.
NDS.Live was co-developed by global OEMs and tech leaders, including Intellias, Daimler, HERE, Denso, Renault and TomTom are among those who have already adopted it. For example, second-generation Mercedes-Benz User Experience (MBUX) systems are powered by NDS.Live. The distributed map data system provides fresh information for the driver assistance system, which gets visualized as augmented reality (AR) instructions on the head-up display (HUD). NDS.Live can help massively improve the navigation experience for EVs and regular connected vehicles. It also helps OEMs deploy value-added subscriptions for assisted driving and navigation.
3. 3D and HD map generation
3D maps enable accurate rendering of physical objects in a three-dimensional form. High-definition (HD) maps feature detailed information about road features (lane placements, road boundaries) and terrain type (severity of curves, gradient of the road surface). Both types of maps are essential for launching advanced ADAS features and, ultimately, ushering in the era of autonomous driving.
3D maps define how the vehicle moves and help it interpret the data it receives from onboard sensors. Since most sensors have a limited range, HD maps assist by providing the navigation system with extra information on road features, terrain and other traffic-relevant objects.
The bottleneck of both HD and 3D mapping is collecting and rendering data. In the case of 3D maps, you need to capture video in real time from multiple cameras, plan for interference due to vibration, temperature and hardware issues, and then repeat the process across billions of kilometers of roads across the globe. Rather than doing this huge task alone, mobility players and OEMs join forces:
• HERE and Mobileye, for example, partnered to crowdsource HD mapping data collection, with VW joining later. Mobileye developed a compact, high-performance computer vision system-on-chip called EyeQ. Installed by more than 50 OEMs across 300 vehicle models, the system supplies Mobileye with ample visual data they can then render into maps with the help of partners.
• TomTom, in turn, teamed up with Qualcomm Technologies to crowdsource HD mapping insights from its users. Qualcomm provides the underlying cloud-based platform for making and maintaining HD maps from various sources, including swarms of connected vehicles.
Photo: Intellias
4. Autonomous driving simulations
Autonomous vehicles require extensive road and track tests to pass security checks. Manufacturers also need to simulate near-crash events without putting anyone in danger. Hyper-realistic virtual worlds can be much safer testbeds for autonomous vehicles (AVs) — especially as virtualization technology improves.
A group of researchers released an open-source, data-driven simulation engine for building photorealistic environments for AV training. The engine can simulate complex sensor types including 2D RGB cameras and 3D lidar, as well as generate dynamic scenarios with several vehicles present. With the new engine, users can simulate complex driving tasks such as overtaking and following.
Waymo takes a similar approach of using real-world data collected from vehicle cameras and sensors to create highly detailed virtual testbeds. The Waymo team has built virtual replicas of several intersections complete with identical dimensions, lanes, curbs and traffic lights. During simulations, Waymo algorithms can be trained to perform the most challenging interactions thousands of times, using the same or different driving conditions and different vehicles from its fleet.
To perfect the performance of the algorithm, the team uses a fuzzing technique. During training sessions, engineers alternate the speed of other vehicles, traffic light timing and the presence or absence of zig-zagging joggers and casual cyclists. Once the Waymo algorithm learns the trick of driving through a specific intersection with a flashing yellow arrow, the “skill” becomes part of the knowledge base, shared with every vehicle across the fleet.
The new generation of high-fidelity 3D environments can be built with data from different sensor types to effectively convey all details of the material world to the algorithm. Existing 3D visual databases already include realistic details for traffic signs, pavement markings and road textures. With machine learning and deep learning algorithms, complex ADAS/AD scenarios can simulate close to real-life conditions.
Photo: Intellias
5. Digital twins of road infrastructure
While OEMs leverage dashcam data collection for building better navigation systems, transportation managers use the same intelligence to digitize road infrastructure. A digital twin is an interactive, virtual representation of physical assets or systems such as a smart traffic light network or smart parking facilities. Powered by real-time data, digital twins of road infrastructure can enable advanced urban planning scenarios. This includes dynamic traffic light signal optimization to reduce congestion as well as prioritized public and service transport management and accurate traffic predictions to optimize planning, signage, construction work schedules, etc.
Low latency is crucial for autonomous driving. Yet 3D map generation on the edge requires substantial computing power. Moreover, vehicles cannot store all mapping data on their route and need to constantly receive over-the-air updates. A group of researchers has proposed placing compact map distribution devices on roadside edges to facilitate point cloud data (PCD) map delivery on the go. The results show that autonomous vehicles can perform self-localization while downloading PCD maps. This system allows autonomous vehicles to receive dynamic new maps for each new destination instead of storing tremendous data records onboard.
6. AR in HUD navigation products
The latest vehicles have an upgraded human-machine interface (HMI)design, featuring new hardware and software elements that allow for AR navigation. AR in HUDs can deliver all standard information from static displays (driving speed, status of the ADAS system, fuel or charge levels), alongside dynamic routing instructions, including information on traffic signs, speed limits, construction work alerts and ETAs.
Overall, AR navigation systems can help drivers make better decisions on the road. A recent comparative study found that drivers using AR-augmented HUDs made fewer errors and drove faster on average than those using conventional HUDs. Participants also rated AR HUD instructions as more useful and easier to understand.
The next advance in navigation will be holographic displays, offering AR instructions in 3D. Advances in lidar technologies already allow for projecting ultra-HD holographic representations of road objects in real time into the driver’s field of view. Such systems can enable shorter obstacle visualization times and reduce driving-related stress, according to Tech Explore.
SBG Systems’ INS Ellipse-D powers Leo Drive’s autonomous car.
The evolution of autonomous vehicles has been a fascinating journey, transforming from science fiction to reality over the past few decades. Most modern cars on roadways worldwide have varying levels of autonomy, ranging from Level 1 features, such as cruise control, to Level 5 fully autonomous features, including the ability to monitor roadway conditions and perform safety-critical tasks without human intervention.
In recent years, several technology and automotive companies have recognized the benefits of autonomous vehicles and their potential impact on communities and industries worldwide. In response, industry leaders have supported autonomous vehicle innovation and adoption by offering new products and working closely with educators, nonprofit organizations and other groups that aim to use autonomous solutions to connect the world.
New solutions combining GNSS technology with inertial navigation systems (INS) have emerged to increase autonomous operation efficiency and development. GNSS/INS serves as the foundation for various autonomous operations, ranging from self-driving vehicles on public roads to sophisticated port machinery. In urban public transportation, the accuracy of GNSS signals can be compromised by tall buildings and signal interference, leading to potential errors in navigation. Meanwhile, in the specialized vehicle sector, the lack of extensive experience in complex environments poses challenges, with unpredictable issues potentially arising.
As we enter a new era of advanced autonomy, companies such as SBG Systems and Septentrio, along with their partners, are pushing the boundaries of what is possible in self-driving technology. SBG Systems and autonomous vehicle developer Leo Drive are integrating GNSS/INS systems, multiple cameras and lidar sensors into Leo Drive’s autonomous platforms for precise navigation and accurate positioning data for safe and efficient operations in urban applications.
Septentrio and Smart yoUr Mobility Inc. (SUM) also are making significant strides in advancing autonomous operations. The companies have formed a strategic partnership to develop and implement a multi-sensor fusion system for autonomous driving. This collaboration aims to enhance self-driving vehicles’ accuracy, reliability and safety by integrating data from various sensors, including lidar, cameras and radar.
Additionally, recognizing the need for precise positioning in complex environments — such as ports packed with equipment and steel containers — SUM and Septentrio are working together on a solution that ensures accurate positioning and reliable autonomous operations in challenging port operations.
Enhancing precision and performance
Leo Drive offers scalable software and hardware solutions, providing a comprehensive, end-to-end service for integration into autonomous systems. The company’s mission is to enhance the accessibility and adoption of autonomous technology across various sectors, including UAVs, unmanned ground vehicles (UGVs) and autonomous driving systems.
To operate its autonomous vehicles effectively, Leo Drive was in search of an INS compatible with its existing platforms and robust enough to meet real-time processing demands in dynamic environments. The company also wanted an INS with dual-antenna RTK capability to offer consistently high precision in positioning and orientation, leading the company to SBG Systems’ Ellipse-D, a dual-antenna RTK INS.
Leo Drive integrated the Ellipse-D INS into its autonomous test vehicle, a passenger car converted for autonomous operations. Equipped with GNSS/INS systems, multiple cameras and lidar sensors, the vehicle requires precise navigation and accurate positioning data for safe and efficient operation. This vehicle serves as a critical platform for research and development (R&D) and technology demonstrations.
The test vehicle is powered by Autoware software, hosted by the Autoware Foundation, a nonprofit organization committed to developing open-source, collaborative software for autonomous vehicles.
Leo Drive mounted Ellipse-D INS onto its test vehicles using non-ferromagnetic materials to prevent interference and ensure optimal sensor performance. The electrical connections were made via RS-232/422 and CAN interfaces, and custom drivers were used within the ROS2 environment to integrate the Ellipse-D’s real-time data into their sensor fusion algorithms.
During the integration phase, the SBG Systems’ support team provided ongoing assistance to quickly address any challenges. The SBG Systems Support portal also was valuable, providing comprehensive guidance and troubleshooting assistance.
Leo Drive’s autonomous car is equipped with GNSS/INS systems, multiple cameras and lidar sensors for precise navigation as well as accurate positioning.
Ellipse-D played a key role in Leo Drive’s Autonomous Vehicle by providing accurate real-time navigation data. Its dual-antenna RTK capabilities ensure orientation data is reliable and supports the vehicle’s complex navigation algorithms. The sensor’s RS-232/422 and CAN connections allowed for easy integration with Leo Drive’s onboard computers. Custom drivers and nodes in the ROS2 environment facilitated smooth communication between the Ellipse-D and other vehicle sensors, enhancing overall system robustness.
Advanced features for better navigation
Since integrating Ellipse-D INS into its autonomous vehicle, Leo Drive said it has experienced several significant improvements, including:
Improved accuracy: Ellipse-D’s high positioning and orientation accuracy has been instrumental in refining the performance and reliability of Leo Drive’s autonomous systems.
Increased efficiency: Ellipse-D’s advanced algorithm enables smoother development processes and more accurate test results, streamlining R&D efforts.
Timely support: The comprehensive customer support, including detailed documentation and a responsive technical support team, ensured a seamless integration process.
Leo Drive identified three standout qualities of SBG Systems that have been critical to its success: exceptional customer support, high-quality products and a user-friendly support portal.
“Collaborating with SBG Systems and integrating the Ellipse-D into our vehicle has been essential in achieving the precision and reliability critical to our R&D efforts and autonomous operations,” said Oğuzhan Sağlam, Leo Drive’s sales manager.
Self-driving shuttles in South Korea
In 2022, Septentrio and SUM partnered for the joint development and technical application of a multi-sensor fusion system for autonomous driving. This led to the integration of Septentrio’s AsteRx-SBi3 Pro+ into SUM SMOBI platform vehicles.
Septentrio’s AsteRx-SBi3 Pro+ integrated into SUM’s autonomous vehicles.
The AsteRx-SBi3 Pro+ features Septentrio’s FUSE+ inertial sensor-fusion technology, which offers a comprehensive solution for these challenges. This includes centimeter-level positioning accuracy (horizontal: 0.6 cm + 0.5 ppm, vertical: 1 cm + 1 ppm) and integrated attitude accuracy (heading: 0.15°, pitch, and roll: 0.02° using a dual antenna set-up) to maintain precise vehicle operation. Additionally, the INS provides reliable speed data (0.02 m/s) for smooth and stable motion control.
In Gangneung, South Korea, a shuttle drives fully autonomously on the city’s roads. While a human driver is still required by law as a safety precaution, this is the first step to a more autonomous transport future.
SUM is collaborating with local governments to allocate bus routes for autonomous vehicles. The company operates autonomous buses on routes in Seoul, South Korea, including the Sangam Dong A2 autonomous vehicle for the Cheongwadae shuttle bus and late-night bus services. SUM also operates autonomous vehicles in Gangneung City.
According to members of the SUM team, this technology ensures accurate stops, optimal route planning, and improved passenger safety by minimizing the risk of collisions and ensuring timely arrivals. SUM’s autonomous shuttles and on-demand transit services benefit from precise positioning, allowing them to adjust routes dynamically based on real-time passenger requests and traffic conditions.
The benefits
According to SUM, coupling Septentrio’s AsteRx SBi3 Pro with SUM’s software and hardware solutions has unlocked many benefits, including:
Enhanced safety: Precise positioning and reliable navigation are paramount for the safety of all autonomous vehicles. Septentrio’s technology ensures accurate lane positioning and collision avoidance capabilities, safeguarding people and property across multiple sectors.
Greater reliability: Septentrio’s antennas ensure consistent and reliable performance for autonomous vehicles, even in challenging conditions. This minimizes downtime and disruptions.
Sustainable transportation: Autonomous vehicles can potentially reduce traffic congestion and emissions across the board. SUM’s technology, which is integrated into various autonomous vehicles, contributes to a more sustainable transportation future for cities and industries.
Additional application: Autonomous port operations
In ports around the world, many aging yard trucks are still being used. However, the industry has been gradually adopting automated port operations to move away from outdated positioning methods and toward autonomous solutions that can redefine operational standards.
Early attempts at using GNSS for positioning autonomous machines in ports faced significant challenges. The chaotic environment of large moving metal machines and constantly changing container stacks created blockage and multipath position errors, making it hard to achieve reliable centimeter-level GNSS positioning.
Modern GNSS technology has revolutionized port automation with its ability to achieve centimeter-level accuracy for autonomous trucks, forklifts and container carriers to navigate narrow lanes and confined spaces with unprecedented precision, dramatically reducing collision risks. Often, autonomous port vehicles must maneuver between cranes with minimal room for errors, highlighting the importance of reliable high-precision technology in the field. This level of precision and adaptability is vital in the logistics industry, given that 90 percent of the world’s goods are transported by sea and 60 percent are packed in large steel containers.
At the Port of Incheon in South Korea, which is on the Yellow Sea across from Northern China, SUM is conducting proof of concept (POC) trials of its autonomous vehicles using Septentrio’s AsteRx-SBi3 Pro+ rugged GNSS/INS receiver. The autonomous yard trucks at Incheon Port successfully navigate autonomously between point A and point B, with the SUM team nearby to identify and resolve any issues. The SUM team said they are focused on stabilizing the system to achieve a fully unmanned operation, aiming to enhance efficiency and automation in port logistics.
SUM notes that integrating Septentrio’s technology with autonomous vehicles in smart ports simplifies operations by providing accurate positioning, enhancing safety and optimizing routes, as well as improving overall port efficiency. The integration supports the seamless operation of autonomous vehicles, helping ports manage their logistics more effectively and respond to the dynamic demands of modern cargo handling.
The autonomous port trucks also are being tested with the new AntaRx-Si3 and AntaRx-AUX antennas installed simultaneously. High update rate logging can improve CPU load and how the antenna’s robust real-time kinematic (RTK) engine uses fewer satellites to reduce the CPU load.
Overcoming positioning obstacles
SUM’s advanced online localization system is designed to continuously track the position of its autonomous vehicles, even in GNSS-compromised environments.
“Our system leverages a sophisticated sensor fusion algorithm that primarily relies on high-accuracy GNSS/INS information from the Septentrio module,” said Daehyuck Park, Ph.D., managing director at SUM. “This module serves as the core source of our positioning data.”
To improve the robustness of the localization system, the company integrated additional sensors, including lidar and cameras. These sensors provide odometry data and facilitate map-matching using static landmarks in pre-mapped areas. By combining data from these sources, SUM explains that its system can perform reliable dead reckoning and offers precise map-based pose corrections to maintain high performance across various challenging environments.
One key challenge in this approach is the potential for GNSS blockages. To address this, SUM has incorporated dead reckoning technology into its systems, which augments the GNSS/INS module’s positioning capabilities by delivering continuous position estimates even when GNSS signals are unavailable.
Integrating vehicle localization systems further enhances dead reckoning by counteracting drift caused by biases in IMU measurements.
Additional sensors such as lidar can improve dead reckoning accuracy further, particularly during movements involving high wheel slips, which dilute the precision of wheel odometry. Despite these advancements, relying solely on dead reckoning for extended distances can lead to an unbounded accumulation of positioning errors.
According to the SUM team, Septentrio’s AsteRx SBi3 Pro+, coupled with SUM’s software and hardware solutions, has unlocked many benefits. Other urban use cases include enhancing delivery services by effectively managing routes and improving traffic management through fleet coordination. SUM adds that autonomous vehicles have the potential to reduce traffic congestion and emissions across the board. SUM’s technology, integrated with a variety of autonomous vehicle applications, contributes to a more sustainable future for our cities and industries.
SUM is continuing to focus on developing solutions to ensure accurate positioning and reliable autonomous operations in challenging environments. SUM and Septentrio aim to accelerate the integration of autonomous solutions to streamline port operations and autonomous vehicle applications in urban environments. The partnership is driving progress toward a more autonomous future, with the goals of reducing costs, increasing efficiency and adapting to the challenges posed by congested GNSS environments. Their joint efforts are being rigorously tested for accurate positioning throughout an autonomous vehicle’s entire journey, even in areas where GNSS signals may be compromised.
Saronic vessels equipped with advanced sensors in contested waters. (Photo: Septentrio / Saronic)
Anti-jamming and anti-spoofing technology protects receivers
Saronic, a Texas-based defense technology company, is leveraging the latest cutting-edge technology for their autonomous surface vessels (ASVs) designed for critical naval missions. These vessels are equipped with sensors for enhanced domain awareness in contested waters. They are designed for tactical deployment, alone or in collaborative swarms, via at-sea launch and recovery from expeditionary craft. Saronic selected Septentrio’s GNSS inertial navigation system (INS) receivers for resilient positioning and orientation for navigating in the most challenging environments. Advanced interference mitigation (AIM+) technology protects Septentrio receivers from jamming and spoofing attacks that threaten to disrupt GNSS-based navigation.
The third Innovative, Connectivity, Autonomous (ICA) Summit will take place May 15-16, 2023, in Frankfurt, Germany.
The ICA Summit 2023 will focus on the various levels of automated vehicles and how the industry is being redefined by fast-changing technology. Industry professionals will discuss how manufacturers and suppliers will integrate key connectivity requirements to achieve advanced levels of autonomous driving.
The closed-door ICA Summit will dive into innovative solutions and regulatory framework of development and validation. Attendees will have a chance to explore the latest developments in the industry and share their insights on the following topics:
• “Autonomous vehicles: Future is today”
• “Connectivity should not be an option for today’s vehicle”
• “ADAS: From ABS to level 5”
• “Software and hardware: The key to superior AI”
For more information and to register, visit the ICA Summit 2023 website.
Mobile mapping is helping accelerate the progression of some of the most difficult engineering challenges on the planet, including those around autonomous driving and advanced surveying techniques, such as lidar.
The complexity of those challenges means that the outputs from a mobile mapping inertial navigation system (INS) must be as accurate as possible. A high-performing INS will make the most of any available GNSS signals, with the aim of providing centimeter-level accuracy even in areas where GNSS performs poorly, for instance in urban canyons. It also offers important data on pitch, roll and heading, which maintains the integrity of survey data even as the vehicle moves across large areas.
With such a wide variety of INS devices on the market, it can be difficult to narrow down the best option. It is important to establish criteria that will aid in evaluating the different INS propositions out there for mobile mapping projects.
Image: OxTS
1) How tightly integrated are the inertial measurement unit (IMU) and GNSS data?
INS is an essential element in providing accurate location data in as many environments as possible. Therefore, it is important to know how effectively the data from the IMU supports the GNSS data. In technical terms, this means evaluating whether the sensors are tightly integrated at all, and if so, how well.
The reason GNSS struggles in urban canyons and under tree canopies is that it is unable to get the six satellite signals necessary for a real-time kinematic (RTK) lock. In this situation, the GNSS will give readings that may be incorrect, as it is essentially trying to solve an equation without having all the numbers.
A tightly integrated GNSS and INS data stream will select the most reliable signals and use those to determine the position of the vehicle. If the data streams are not tightly integrated, then the INS’ ability to counteract GNSS issues is limited. Without accurate positioning, data scans will lose accuracy and even become completely incoherent the longer the user scans — making them unreliable at best, and unusable at worst.
2) Trading off accuracy and cost
Although accuracy is vital in mobile mapping, some INS devices will provide data that is far more accurate than the given job requires. Because greater accuracy equals greater cost, users may be paying more than necessary.
With that being said, the scale of accuracy and cost is not linear. An INS half the price of the most expensive one on the market will not be half as accurate. Look at each offering carefully to see what it includes and decide what level of accuracy and features are vital to the task. Eliminating unnecessary levels of precision or additional software features that are not needed is an effective way to make some savings.
3) How rugged is the device?
Mobile mapping vehicles will likely be out in the dry, wet, hot, cold, mud and snow. These vehicles will almost certainly be used consistently for long periods of time. Thus, it is essential to know that none of these conditions will stop the INS from working at peak effectiveness. Look for the IP rating (IP65 is essential for being weatherproof and protecting against shocks and dust) and ask what the average lifespan of the product is.
Image: OxTS
4) Can the device be properly calibrated?
Any INS is only as good as its calibration. Without calibration, the sensors in any INS can become misaligned and therefore provide inaccurate readings. Talk to vendors about their calibration processes — do they work to a nationally recognized standard of calibration like ISO 17025? Do their calibrations account for variations in temperature or humidity?
It is also worth considering how often sensors need recalibration. Recalibration is a chargeable service from most vendors, meaning the more the device needs recalibrating, the more the user will have to pay. This could also lead to delays if the user must send units abroad to have them recalibrated.
A roundup of recent products in the GNSS and inertial positioning industry from the January 2023 issue of GPS World magazine.
SURVEYING & MAPPING
Image: Geometer International
Dual-Frequency Receiver
Receives all GNSS constellations plus SBAS
The Walker RTK is a dual-frequency GNSS receiver (L1, L2) for high-precision coordinate surveying in real-time kinematic (RTK) mode. It comes with a helical antenna, a bracket for attaching a smartphone, and the Geometer SCOUT mobile app. A classic geodesic antenna can be connected through the SMA connector. The Walker RTK has a rugged aluminum alloy casing with a shock-resistant coating, yet weighs only 250 grams. GNSS signals processed by the Walker RTK GNSS receiver include GPS (L1C/A, L2C), GLONASS (L1OF, L2OF), Galileo (E1B/C, E5b), BeiDou (B1I, B2I), QZSS (L1C/A, L1S, L2C) and SBAS (L1C/A). A built-in rechargeable battery provides 24 hours of continuous operation without recharging.
The AsteRx SB3 ProBase creates high-quality measurements for real-time kinematic (RTK) and differential corrections. The IP68-housed GNSS base station receiver features the latest quad-constellation GNSS technology and complements the SB3 receiver family: the AsteRx SB3 Pro rover receiver, the AsteRx SB3 Pro+ rover and base receiver, and the AsteRx SB3 CLAS for the Japanese market. The SB3 ProBase is easy to configure, the company says. It comes with Septentrio’s GNSS+ technologies, including anti-jam and anti-spoofing technology (AIM+) for robustness and reliability. AsteRx SB3 products are pin-to-pin compatible with the AsteRx SB ProDirect receiver and the recently released AsteRx SBi3 GNSS/INS system.
The Algiz 10XR is a rugged 10-inch Windows tablet that combines durability with a GNSS receiver and 5G communications. It was developed for challenging environments in logistics, mining, public transport, public safety, waste management or geographic information systems (GIS). The 10xR is customizable and has a dedicated multiband GNSS u-blox NEO-M8U receiver for accurate positioning as well as untethered dead-reckoning technology. The high-resolution, sunlight-readable 10-inch touchscreen has super-hardened glass and rain-and-glove mode. The tablet also has 4G/LTE high-speed data, Wi-Fi and Bluetooth.
The VZ-600i terrestrial laser scanner has a 3D position accuracy of 3 mm and less than 30 seconds of scan time for high-resolution scans with 6 mm point spacing at 10 m. This enables more than 60 scan positions per hour with real-time registration. Weighing less than 6 kg (13 pounds), the VZ-600i has a 2.2-MHZ pulse repetition rate, three internal cameras and an integrated GNSS receiver. It also includes key features to speed up workflows in indoor and outdoor applications such as architecture, engineering, construction, building information modeling, as-built surveying, forensic and crash scene investigation, archaeology and cultural heritage documentation and forestry.
The LP360 Drone software system provides a geospatial-data workflow for UAV lidar and photogrammetry data processing. It provides powerful point cloud visualizations with multiple, synchronized windows. It can transform lidar and imagery data into survey-grade deliverables including visualization, quality checks, classification, analysis and 3D editing. For users of larger datasets, LP360 Geospatial can process captured lidar data or images from any aircraft or mobile sensor and analyze and extract values.
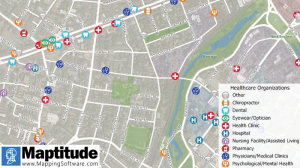
Free library offers data on healthcare, business, traffic
The extensive Maptitude library of free mapping databases has been updated for 2022 and is available for download, supporting insightful business development analysis. The data is available free to users of the latest version of the Maptitude mapping software. The data are also available as shapefile, KML, KMZ or GeoJSON for a fee. Maptitude includes business-critical data such as demographics, boundaries, streets, and the most ZIP Code/postal boundaries. Also available is a catalog of free premium datasets that can be used in other GIS applications, on the web, or in corporate databases.
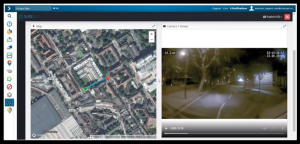
Indoor and outdoor tracking of low-power, small IoT devices
Traxmate is integrating Nestwave GNSS location technology into its asset-tracking platform for seamless indoor and outdoor positioning, tracking and routing of small, low-power and battery-powered devices for the internet of things (IoT). Nestwave’s NestCore IP and NestCloud cloud services enable power-efficient geolocation solutions, while Traxmate (pictured) is a comprehensive data-processing hub that simplifies setup of tracking environments and provides real-time visualization of device location. The resulting geolocation solution is suitable for applications ranging from carrier tracking to tracking individual parcels and packets. Traxmate is simple to use and set up, requires no coding, and provides an out-of-the-box feature set that includes dashboards, alerts and processing rules for taking actions on incoming data. Nestwave’s trackers include ThinTrack, an ultra-low-profile, compact GPS tracking solution that integrates an LTE-M/NB-IoT modem, antenna, battery and SIM into a device that measures 82 mm x 35 mm x3 mm and weighs 15 g.
Provides guidance even without an internet connection
The Sygic GPS Navigation app uses a smartphone’s camera and augmented reality to display navigation instructions over the view ahead on the windshield. The head-up display is especially useful at night, enabling recognition of critical speed limit, road work or traffic restriction signs. Cockpit is a powerful tool that shows the real-time performance of the car, measuring the G force and actual speed to help users drive economically. The Dashcam feature records the road ahead and automatically saves the video in case of an accident. An Electric Vehicle Mode locates nearby charging stations.
Enhanced data-based rule implementation for fleets
An enhanced SureCam video telematics integration provides fleet managers with access to new capabilities to keep drivers safe and maximize fleet efficiency. The solution features a method for capturing video footage from SureCam cameras using Geotab’s powerful telematics device and rule-based system. The result is a seamless display of video within the MyGeotab platform. The enhanced SureCam fleet video solution leverages Geotab’s numerous data-based rules, such as improper seat belt usage and speeding. It uses G-force triggered alerts that detect unsafe driving behaviors and automatically captures video footage that can be reviewed later on the MyGeotab platform and alert managers to incidents when necessary. Camera configuration and customized triggers are managed directly within MyGeotab.
Driver 2.0 is a Level 4 production-ready autonomous driving solution that can operate in complex and challenging traffic environments. Demonstrations with Driver 2.0 showed an autonomous vehicle could maneuver around double-parked cars, e-scooters and pedestrians, negotiate oncoming vehicles to calculate the right timing and trajectory to pass busy intersections, and make multiple lane changes and unprotected left turns. In the case of long tail scenarios, the system will alert the remote monitoring center to intervene or take other safety measures. Driver 2.0 includes five solid-state lidar units, eight cameras and other sensors, and a computing platform integrated with a proprietary inference engine. The perception algorithm with sensor fusion can achieve precise object detection up to nearly 220 yards. The planning and control algorithm based on game theory can choose optimal routes and make decisions based on real-time situations when negotiating with oncoming vehicles and other road agents.
Provide improved signal gain for automotive antennas
Two new compounds could improve signal-gain performance compared to ceramics in second-generation automotive GNSS antennas. The new compounds — LNP Thermocomp ZKC0CXXD and LNP Thermocomp ZKC0DXXD — help enable the design and molding of antenna substrates with more complex pattern markings that add effective surface area, a critical factor in enhancing signal capture. They also provide flexibility to produce smaller parts with the same performance as ceramic, or equal-size parts with better performance. The LNP Thermocomp compounds feature electroplating capability, good thermal resistance for reliability, and the design freedom and production efficiency of thermoplastics. Both are well-suited for shark-fin-style and new conformal antenna designs.
SABIC, sabic.com
AUTONOMOUS
Image: Civ Robotics
Robotic Surveyor
Precisely marks thousands of coordinates per day
The CivDot unmanned ground vehicle (UGV) is designed for civil engineering and infrastructure projects such as solar farms, roadways, data centers, power plants and more. The autonomous surveying robot is designed to increase efficiency, productivity and safety on the job. Augmenting the surveyor’s work, CivDot marks thousands of coordinates per day precisely and efficiently, while delivering layouts faster than traditional methods. Civ Robotics uses Trimble’s high-precision GNSS positioning technology and surveying software.
The compact DJI Mavic 3E and 3T drones have been designed for an array of commercial missions. Flight time is 45 minutes. Both models have a real-time kinematic (RTK) module that enables surveying professionals to achieve centimeter-level accuracy with support for network RTK, custom network RTK services, and the D-RTK 2 Mobile Station. The D-RTK 2 Mobile Station is DJI’s upgraded high-precision GNSS receiver that supports all major GNSS, providing real-time differential corrections. The DJI Mavic 3E enables efficient mapping and surveying missions without the need for ground control points. The DJI Mavic 3T is engineered for aerial operations in firefighting, search and rescue, inspections and night missions.
XPeng Motors‘ new XPeng P5 smart electric vehicle is equipped with automotive-grade lidar technology. The P5 has “navigation guided pilot” (NGP) capabilities, which will be on China’s city roads for the first time in a production vehicle, powered by XPeng’s full-stack in-house developed autonomous driving system XPILOT 3.5.
The XPILOT 3.5 autonomous driving system has a high-precision positioning unit (GNSS + inertial measurement unit, or IMU) along with 32 perception sensors — two lidar units, 12 ultrasonic sensors, five millimeter-wave radars and 13 high-resolution cameras. The sensors are fused into a 360° dual-perception system to provide sufficient redundancy to handle challenging and complex road conditions.
The double-prism lidar units are able to distinguish pedestrians, cyclists and scooters, static obstacles, and road work, in challenging scenarios such as night and low-light conditions, backlighting and alternating light-and-dark illumination in tunnels.
Extending the NGP function from highways to city diving, the P5 will be able to handle situations such as other autos cutting in, automatic follow and speed-limit optimization on urban roads, recognizing traffic lights as well as small objects.
The P5’s Xmart OS 3.0 in-car operation system supports all-voice interaction. It uses Qualcomm’s Snapdragon SA8155P auto-grade computing platform to ensure seamless user control and interaction. The instrument console includes a 15.6-inch screen with essential information and controls where the driver needs them. Xmart OS 3.0 also allows vehicle-to-home connection.
The P5 will be featured at Auto Shanghai 2021 on April 19.
On a test track in Sweden, a truck successfully merged between two cars driving alongside it in a fully automated maneuver. The live demonstration took place at the AstaZero test site near Borås, Sweden, on Nov. 21, 2019, showing automotive industry experts how well the automated merging solution performed.
The Fraunhofer Institute for Integrated Circuits IIS and project partners RISE, Scania, Waysure, Ceit-IK4, Baselabs and Commsignia are taking part in an EU-funded project PRoPART, which stands for Precise and Robust Positioning for Automated Road Transports.
Vehicles on the road already perform certain steps on behalf of the driver, such as parking. Together with its project partners, the Fraunhofer IIS has developed a precise and robust position determination system for use in autonomous trucks as part of PRoPART.
Autonomous driving is about interactions among vehicle systems, connecting vehicles and equipping them with precise and robust navigation solutions. The challenge is to ensure that different automated driving systems deliver precise and reliable positioning information.
Using GOOSE technology
With its GOOSE GNSS receivers, Fraunhofer IIS provides highly accurate and reliable positioning to the PRoPART project. The GOOSE can bridge signal interruptions for short periods of time, potentially obviating the need for the driver to intervene at all.
In conjunction with GNSS, developers are using a combination of sensors such as radar and cameras in the vehicle. Supplemented by reference stations along the route, the combination of GNSS and sensor data enables highly available position solutions up to the decimeter range.
“This is a key step on the road to autonomous driving,” explained group manager for precise GNSS receivers Matthias Overbeck, Fraunhofer IIS. “It’s about ensuring the merging maneuver is precise and avoiding accidents — something we can achieve only with highly accurate and reliable positioning technology.”
GOOSE platform. (Photo: Fraunhofer IIS)
Spoofing protection
These days, a variety of electronic systems for providing satellite navigation signals are available and are often used to generate fake positions for gaming apps on smartphones. Such systems could disrupt satellite receivers while remaining undetected.
GOOSE makes use of the Galileo Open Service Navigation Message Authentication (OS-NMA), which is not officially available until 2020. OS-NMA transmits encrypted keys on the Galileo satellite signals that make it extremely difficult to fake a position, thus ensuring that reliable positioning information can be provided to vehicles in the future.
Sapcorda Services GmbH has released its SAPA (Safe And Precise Augmentation) Premium GNSS positioning service.
The SAPA service enables mass-market GNSS devices to operate with increased accuracy and reliability across Europe and the continental United States. The service’s technology unlocks advanced performance with instantaneous sub-decimeter position accuracy for devices used in all market applications.
SAPA is delivered using the open industry-recognized SPARTN format, which allows efficiently delivery of the correction data via internet and satellite broadcast. “When using our service, users across Europe and the United States can experience homogeneous, gap-free, advanced positioning performance with any GNSS hardware designed for high precision positioning,” CTO Rodrigo Leandro said.
The SAPA service is tailored for mass-market applications including innovative mobility solutions, IoT applications, and traditional markets such as maritime.
SAPA was designed from ground up to support safety-critical applications such as autonomous driving.
SPARTN (Safe Position Augmentation for Real-Time Navigation) is a high-accuracy, open- and free-to-use GNSS format tailored for broadcast distribution in mass-market applications.
Sapcorda Services GmbH is a GNSS service provider focusing on the emerging high-precision GNSS mass markets. The company has designed its technology and service offering to serve high volume automotive, industrial and consumer markets.