When I saw that there was a plan for a whole bunch of unmanned, semi-autonomous racecars to compete at the Indianapolis Motor Speedway (Indy, or IMS) racetrack, I initially thought we might be headed to one significant mess of broken-up machines and potentially a lot of damage. I tracked the various announcements of the competition as things progressed, especially when a prize of $1 million dollars was put up by the Lilly Endowment in Indianapolis, and the majority of the field appeared to be potentially staffed by undergrad university teams.
Photo: Indy Autonomous Challenge
However, this isn’t the first time we’ve had unmanned, autonomous road vehicles in competition — we’ve seen highly instrumented SUVs in desert settings in Nevada and California, initially with pretty poor results, which began to improve significantly for the second time round, then vehicles in some simulated street settings with some mixed and also some pretty good results.
So, as the competition date grew closer for the Indy Autonomous Challenge (IAC), the number of published progress reports began to increase, and we began to better understand how the initial 40 teams might take on this seemingly impossible task — how on Earth will they replicate a regular Indy (also a class of racecar) race? Surely many unmanned racecars on the same track at the same time doing more than 150 mph would be catastrophic!
When you take a look, however, at the advances we’ve seen, which have enabled unmanned cars, trucks, taxis and such – surely this tech could stretch to meet these major objectives? But Dallara AV-21 Indy Light racecars avoiding hurtling walls passing by, cornering, getting in and out of the pits, coping with vehicles behind, ahead and overtaking — even a superior-equipped unmanned racecar at >150 mph — well that’s something we would really need to see.
Then you have to take a look at the outfits involved, providing support to the IAC teams – companies including Cisco, and motor sport units such as ADLINK, Ansys, Aptiv, Bridgestone, Luminar, Microsoft and Valvoline and the non-profit Energy Systems Network. The University teams from around the world themselves appeared to also have significant heritage and skill-levels.
As the 40 University teams started the long trek to get over the hurdles that this challenge presented, members from 21 of those institutions were actually able to make it to Indy, grouped into nine “national” teams. By October 23 the nine teams, with only one car each, were ready to test their autonomous vehicles on the actual track.
Clemson University established the baseline Dallara AV-21 vehicle and technology to be used by each team for the race, with sensors monitoring chassis motion, suspension, tires and powertrain. Each team would install its own guidance and avoidance system, with each vehicle equipped with six cameras, four lidars, RTK GNSS, associated radios and bags of computing running each team’s customized control system software. The object being for cars to exit pit-lane, accelerate, brake, establish an optimum line for each corner and flat, avoid obstacles, evaluate the track conditions and establish tolerable limits.
The teams were required to complete several stages of selection, from submission of initial proposals through demonstration of existing vehicle automation capability, simulated race performance, qualification testing at the Indy track — all leading to an anticipated head-to head race against the other qualifiers.
Then 20 days of planned testing stretched to 50, and three months of preparation passed with students working intensely throughout, curing the glitches, experimenting with how to increase lap speed, and pushing the limits while still keeping the cars intact.
Energy Systems Network managed the rules of the final competition in a way that reflected Indy qualification days prior the main race — they judged that the technology was not yet at a stage where multiple cars on the track at the same time would have been such a good idea. So, each car was to individually run a number of practice/qualification laps and the quickest car would be the winner.
During the first stage of live competition, cars were required to exit the pits and run a warmup lap, followed by two laps that were timed and a slow-down lap that required navigating around inflatable barriers on the front-stretch, and then return successfully back around the track into their pit-stop locations. There were several spins in the corners and several crashes, but the four surviving cars/teams were able to optimistically post speeds of more than 130 mph.
Photo: Indy Autonomous Challenge
The final phase involved the four teams taking their cars around a number of warm-up/practice laps, followed by four timed laps. Only the car from Germany’s Technical University of Munich was able to complete all laps with an average speed of ~136 mph, so that team ultimately won the $1 million prize. Even so, all teams were able to successfully mature their systems’ performance through the many months leading up to the IAC and their progress through the various qualification stages. Even the other three final qualifiers had much to celebrate as a result of the competition.
The sponsors supporting the various teams as they progressed through the Challenge may have spent more than $120 million, so that high-pressure development work will be invested back into many vehicle automation opportunities. After all, that was the main objective for the whole undertaking. We should hopefully begin to see safer, more capable self-driving vehicles emerge in the months to come as the technology is applied to more production vehicle automation.
Fugro’s Blue Essence, an offshore certified uncrewed surface vessel (USV) with an electric remotely operated vehicle (eROV), will begin its first project in the Netherlands.
The vessel is controlled from an onshore remote operations center (ROC) via a satellite connection. It will be used for the inspection of offshore assets, construction support services, and hydrographic and geophysical surveys.
USVs play an important role in the future of the maritime sector by improving safety, reducing carbon emissions, and delivering data more efficiently. USV operations remove personnel from high-risk offshore environments to an onshore ROC and reduce carbon footprint by 95 % when compared to traditional survey methods. Cloud-based data processing allows near real-time data delivery, leading to faster and more informed decision making.
“We welcome this special vessel in our port. It’s the first time a remotely controlled uncrewed vessel will go to the North Sea from the port of Rotterdam to carry out a project without any personnel on board,” said René de Vries, Harbour Master of the Rotterdam Port Authority. “We are proud that this project will be executed safely due to the careful preparation of all parties involved. We expect the development of digitalization in the shipping sector will improve the safety and accessibility of the Rotterdam port.”
Since 2020, Fugro has been deploying its Blue Shadow USV fleet for medium- to large-scale hydrographic survey applications. Fugro’s first Blue Essence has completed its first remote inspection, in Asia Pacific.
“I am excited that we now also have this newest generation of USVs available for European clients,” said Erik-Jan Bijvank, group director Europe and Africa at Fugro. “Over the coming years, Fugro will further expand its fleet of USVs for safer, more sustainable solutions for marine operations.”
The PwrPak7-E1 from Hexagon | NovAtel is now supported on the Nvidia Drive Hyperion autonomous vehicle (AV) development platform. Selected for its robustness and precise position output, the PwrPak7-E1 will be offered with Nvidia’s autonomous driving test fleets worldwide.
Drive Hyperion is a fully operational, production-validated and open AV platform that reduces the time and cost required to outfit vehicles with autonomous driving and artificial intelligence (AI) features.
Powered by NovAtel’s OEM7 GNSS engine, the PwrPak7-E1 provides high-precision positioning used in the development of autonomous vehicles. The PwrPak7-E1 delivers NovAtel’s SPAN technology (GNSS + inertial navigation system, or INS) in an integrated, single enclosure.
Ground truth is the critical position reference for autonomous driving software behavior that can be validated. The PwrPak7-E1 provides ground truth in conjunction with Novatel’s Waypoint Inertial Explorer post-processing software. The device also has several connection options (serial, USB, CAN and Ethernet).
The GNSS and inertial measurement unit (IMU) output of the PwrPak7-E1, along with data from other onboard sensors, are recorded and fed into Nvidia’s sophisticated autonomous-driving development infrastructure and processing pipeline. There, data is synchronized, used for training AI models, and used in testing of various software components and autonomous driving behavior.
“Drive Hyperion is designed to give developers the ability to develop, evaluate, and validate AV technology more quickly,” explained Glenn Schuster, senior director of sensor ecosystems at Nvidia. “NovAtel’s compatibility on our platform provides developers the confidence to synchronize their sensor data with precision location information.”
DJI Mavic 3 has better sensor, dual-camera system, omnidirectional obstacle sensing, smarter flight modes and longer flight times
Mavic 3 drone. (Image: DJI)
The new DJI Mavic 3 is an update of the company’s folding camera drone, providing comprehensive improvement and boosting performance for aerial photography.
The Mavic 3 has improved navigation and obstacle sensing systems. A powerful positioning algorithm improves hovering precision with signals from GPS, GLONASS and BeiDou satellites. This enables Mavic 3 to lock onto multiple satellite signals faster. The increased positioning precision also makes the drone less likely to drift in the air and more stable when shooting long exposures and time lapses.
For its obstacle sensing system, Advanced Pilot Assistance System (APAS) 5.0 combines inputs from six fish-eye vision sensors and two wide-angle sensors, which seamlessly and continuously sense obstacles in all directions and plan safe flight routes to avoid them, even in complicated environments.
The obstacle-sensing system also enables more intuitive subject tracking with the upgraded ActiveTrack 5.0. Previous iterations of ActiveTrack enabled the camera to follow a subject as it moved directly toward and away from the drone while remaining largely stationary as well as fly alongside a moving subject. ActiveTrack 5.0 allows Mavic 3 to move with the subject as it moves forward, backward, left, right and diagonally, and fly alongside as well as around a moving subject.
If the subject moves too fast and temporarily goes out of frame, visual sensors on the aircraft will continue to track and frame the subject intelligently and pick it back up when it reappears. These new directions enable much more fluid and diverse drone and camera movement while using ActiveTrack.
Other safety features include geofencing, which alerts drone pilots when they fly near sensitive locations; altitude limits to ensure pilots are aware of altitude restrictions; and the AeroScope Remote ID system that allows authorities to identify and monitor airborne drones in sensitive locations.
Mavic 3’s integrated AirSense system, first widely introduced in DJI Air 2S, warns drone pilots of nearby airplanes and helicopters transmitting ADS-B signals, so they can quickly fly to a safer location.
Hasselblad camera
Mavic 3 has a 4/3 CMOS Hasselblad camera and 28x hybrid zoom camera. Omnidirectional obstacle sensors have a 200-meter range, and redesigned batteries provide up to 46 minutes of flight time.
Upgraded hardware and software can process 5.1K video at 50 frames per second and support 4K/120 fps for high-quality results for slow-motion footage. An enhanced Mavic 3 Cine edition offers Apple ProRes 422 HQ encoding for richer video processing, with an internal 1TB SSD onboard for high-speed data storage.
DJI Mavic 3’s customized L2D-20c aerial camera embeds a professional-grade 4/3 CMOS sensor with a 24 mm prime lens in a sleek and compact form. Rigorous Hasselblad standards for hardware performance and software algorithms allow it to shoot 20-MP still images in 12-bit RAW format and videos in 5.1 K at 50 fps and 4 K at 120 fps. The higher video definition creates smoother footage and more generous cropping possibilities and allows for slow-motion video at 120 fps.
The larger image sensor gives Mavic 3 higher video resolution and dynamic range and more effectively suppresses noise in low-light environments. A native dynamic range of 12.8 stops helps retain more details in highlights and shadows, preserving rich visual information with a greater sense of depth and elevating imagery to a professional level. An adjustable aperture of f/2.8-f/11 is available to meet the needs of aerial photographers in a wide variety of lighting scenarios to get sharper and clearer images.
A roundup of recent products in the GNSS and inertial positioning industry from the November 2021 issue of GPS World magazine.
OEM
Simulator
Designed for desktop convenience
Photo: Orolia
The BroadSim Solo has a compact form factor designed to fit comfortably at a typical desk or workstation. It shares the same Skydel simulation engine that runs on a standard BroadSim, BroadSim Anechoic and BroadSim Wavefront. It supports advanced scenario creation features and the benefits provided by a software-defined architecture such as high dynamics, a 1000-Hz iteration update rate and ultra-low latency of 5 ms. Nearly all civilian GNSS signals can be generated through the Solo’s single RF output (one frequency band at a time), along with jamming or spoofing signals, and GPS AES M-code.
Series offers GNSS, 5G NR, and wifi-6E combination
Photo: 2J Antennas
The Stellar series of antennas is designed for a large suite of devices with a focus on GNSS, sub-6 GHz, 5G NR, 4G LTE, 3G, 2G and WiFi-6E technologies. The series is suitable for law enforcement, medical transportation, fire rescue and other mission-critical applications. The series includes single or up to 9-in-1 configuration choices within the range of 617 MHz to 7125 MHz frequency bands. The patent-pending technology reduces the antenna footprint by 55% while implementing a new double trifilar design and longitudinal resonances for MIMO/ARRAY configurations that traditionally have more complex size restrictions (such as B71 band/600 MHz). Each antenna configuration uses symmetrical or asymmetrical resonators for negative sections of the antenna, resulting in maximum performance at low and mid frequencies.
The full-band GNSS HC990E embedded helical antenna is designed for precise positioning, covering the GPS/QZSS-L1/L2/L5, QZSS-L6, GLONASS-G1/G2/G3, Galileo-E1/E5a/E5b/E6, BeiDou-B1/B2/B2a/B3, and NavIC-L5 frequency bands, including the satellite-based augmentation system (SBAS) available in the region of operation [WAAS (North America), EGNOS (Europe), MSAS (Japan), or GAGAN (India)], as well as L-band correction services. The HC990E embedded helical antenna is designed and built for high-accuracy positioning. It is packaged in a very light and compact form factor, making it suitable for a wide variety of applications, especially lightweight UAV navigation. The HC990E is 60-mm wide and 25-mm tall, weighing 12 grams. It features a precision-tuned helical element that provides an excellent axial ratio and operates without the requirement of a ground plane. The HC990E also features a low-current, low-noise amplifier (LNA) and pre-filter to prevent harmonic interference from high-amplitude signals, such as 700 MHz band LTE and other nearby in-band cellular signals.
The SA65 chip-scale atomic clock (CSAC) provides precise timing accuracy and stability in extreme environments. Designed for military and industrial systems, it features ultra-high precision and low power consumption. The SA65 CSAC delivers higher performance than the previous SA.45s CSAC, including double the frequency stability over a wider temperature range and faster warm-up from cold temperatures. It has an operating temperature range of –40° C to 80° C and a storage temperature range of –55° C to 105° C. The warm-up time of two minutes at –40° C is 33% faster than that of the SA.45s. These performance improvements benefit designers of highly portable solutions for military applications such as assured positioning, navigation and timing (A-PNT) and C5ISR (command, control, communications, computers, cyber, intelligence, surveillance and reconnaissance).
Samsung Electronics is offering a new processor for wearables, the Exynos W920. The new processor integrates an LTE modem and is built with an advanced 5-nanometer (nm) extreme ultraviolet process node, offering powerful yet efficient performance demanded by next-generation wearable devices. The Exynos W920 is embedded with a GNSS L1 receiver (GPS, GLONASS, BeiDou, Galileo) for tracking speed, distance and elevation during outdoor activities. It also has a 4G LTE Cat. 4 modem. It has two Arm Cortex-A55 cores for high-performing, power-efficient processing and an Arm Mali-G68 GPU with CPU performance improved by 20% and 10 times better graphics performance than its predecessor. The Exynos W920 supports a new unified wearable platform that Samsung built jointly with Google, and will be first applied to the upcoming Galaxy Watch model.
The Arrow Gold+ and Arrow 100+ expand upon the features of the Arrow Gold and Arrow 100. The Arrow Gold+ has a battery life 3.5 hours longer, for a total of 11 hours of field autonomy. It supports concurrent use of BeiDou B3 and GPS L5 signals when using RTK corrections, and the upcoming Galileo E6 High-Accuracy Service (HAS). The Arrow 100+ has a battery life 6 hours longer than the Arrow 100, for a total of 18 hours of field autonomy. It also supports Atlas H50 (Basic) service subscriptions, which provide 30-50 cm positioning accuracy worldwide when no SBAS or RTK network is available. Both the Arrow Gold+ and Arrow 100+ use Eos Bridge to connect with external sensors — multiple mobile devices can connect to a single Arrow GNSS receiver via Bluetooth.
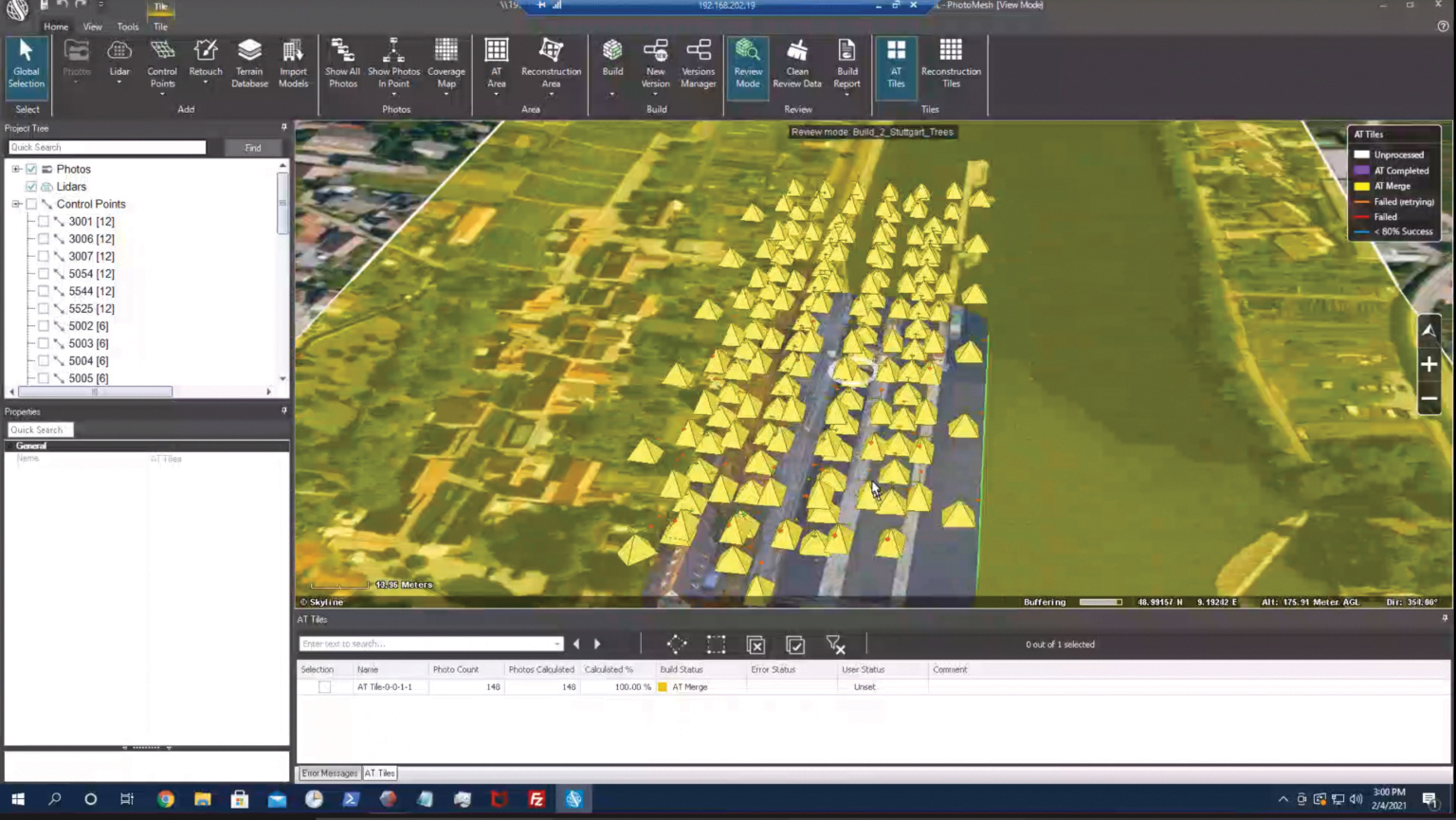
EagleView’s high-resolution ortho and oblique imagery now can be converted into 3D mesh layers with Skyline’s PhotoMesh and viewed, edited and analyzed on Skyline’s TerraExplorer platform. EagleView customers will be able to use Skyline’s TerraExplorer web-based GIS viewer and editor to see, analyze and share their imagery in an immersive environment. Accurately measuring distance, area and volume is now easier than ever, which is critical for planning and zoning to verify regulations or estimate the costs of flattening a site. With floodplain analysis, disaster management can identify flood risks before they happen, and with viewshed calculations E911 can pre-plan for high-profile events. Other key analytic features for customers include the ability to analyze shade, view contour and slope maps, and view in underground mode. The additional 3D Mesh capability is available as an add-on to any new Reveal Essentials+ Property or Neighborhood image capture.
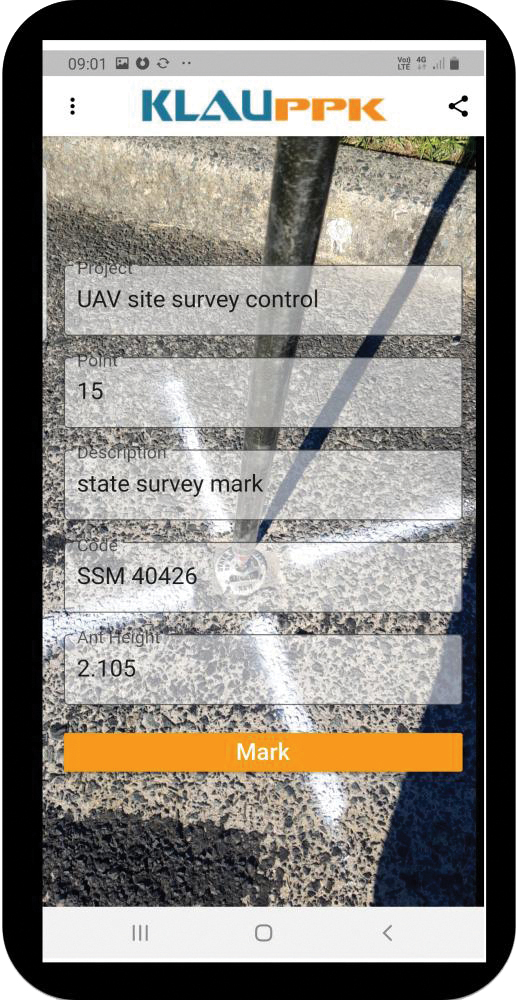
The KlauPPK Phone App, designed for use on drones with KlauPPK hardware and software, enables users to collect ground survey points with a name, description, feature code and antenna height like a traditional survey controller. The app sends the information to the operator’s computer for processing with the raw GNSS data logged in the KlauPPK unit on the pole. After post processing, the accurate survey data can be brought into CAD software to create points and line strings. The app takes a photo of the point being captured, and metadata is collected in the project. Users can place ground control points or check points, pick up as-built data like roads and utilities, and perform basic surveying. The system is compatible with the hybrid PPP/PPK MakeItAccurate post-processing service.
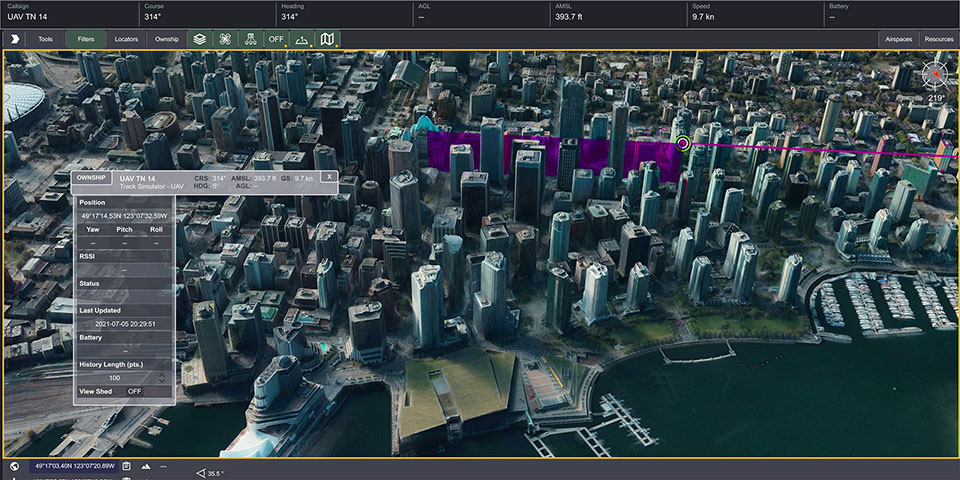
TerraLens 9.3 is a real-time software development toolkit for geospatial visualization. This release improves performance for 3D visualization for large viewports and multi-domain visualization features for command-and-control applications. It is significantly faster to enhance situational awareness. With increased multithreading in its map handling, TerraLens can load and display vector, raster and elevation formats smoothly without pre-processing, suitable for applications with disk size constraints or customers with a short turn-around time. A pre-processing option is still included. Improved data culling ensures only visible items will be rendered — especially noticeable when displaying large numbers of dynamic tracks and objects. New tools and features including support for OGC 3D Tiles for cityscapes, and a new API to control resolution of terrain mesh. Elevation warnings can now be displayed.
The ZEB Vision 16MP panoramic camera is now available for pre-order. Suitable for any ZEB Horizon, the new camera provides better colorization, image walkthroughs and point-cloud measurements using optional Draw software. Further updates mean GeoSLAM customers now can take a ZEB Horizon from handheld to UAV usage to get a more complete picture of projects. ZEB Horizon is compatible with the DJI Matrice 300 UAV.
A new series of automotive-grade positioning modules are operational up to 105° C (221° F). The NEO-M9L modules and the M9140-KA-DR chip are built on the u-blox M9 GNSS platform and use dead-reckoning techniques to provide accurate position data when satellite signals are compromised or unavailable. The NEO-M9L-20A and NEO-M9L-01A modules, as well as the M9140-KA-DR chip, are specially designed for first-mount automotive solutions. The NEO-M9L-01A variant offers an extended operational temperature range up to 105° C, making it suitable for integration on the roof, behind the windscreen, or inside hot electronics control units. Applications include integrated navigation systems such as in-vehicle infotainment (IVI) and head units, integrated telematics control units and V2X.
Provides positioning accuracy in tunnels, parking garages
Photo: SkyTraq
The PX1120D GNSS/inertial measurement unit (IMU) is suitable for both automotive pre-installation and aftermarket. The robust dead-reckoning module integrates a six-axis IMU and a concurrent quad-GNSS chipset. It receives signals from GPS, GLONASS, Galileo and BeiDou, as well as QZSS. The sensor-fusion module maximizes positioning accuracy in challenging environments, providing continuous navigation in tunnels and underground parking lots. For automotive pre-installation applications where vehicle wheel-tick signals are available, the PX1120D provides wheel-tick sensor fusion with automotive dead-reckoning. In aftermarket applications where wheel-tick signals are unavailable, the PX1120D provides an untethered dead-reckoning sensor-fusion solution. A single PX1120D module provides both automotive and untethered dead-reckoning functionality, simplifying logistics. It is suitable for infotainment systems, telematics control units, vehicle tracking, and advanced driver-assistance systems.
The Trooper Max 5G FR1 antenna platform is a 5G configurable and low-profile antenna platform for intelligent transportation and public safety applications. Configurable and optimized for multiband applications, the platform includes an option to add land mobile radio connectivity through an external whip port. With a slender shark-fin form factor, the Trooper Max is recommended for installation on public safety fleets. It is compatible with cellular routers supporting 600-MHz to 6-GHz frequencies. It also covers Wi-Fi 6 frequency ranges.
Version 7.9 of the CompassTrac fleet and asset management solution provides winter fleets with more detailed spreader controller information and greater insight through enhanced dashboard and reporting functions. Features include integration of numerous spreader controllers for granular, pre-wet and liquid materials; a snow-fighting dashboard consolidating key performance indicators; and a snow materials report that delivers historical reporting of granular, pre-wet and direct liquid material application rates and totals, including air and road temperature (where available). The fleet-management solution integrates GNSS, GIS and wireless networks, enabling end users to view the real-time locations and status of vehicles, people, and other high-value assets for full situational awareness.
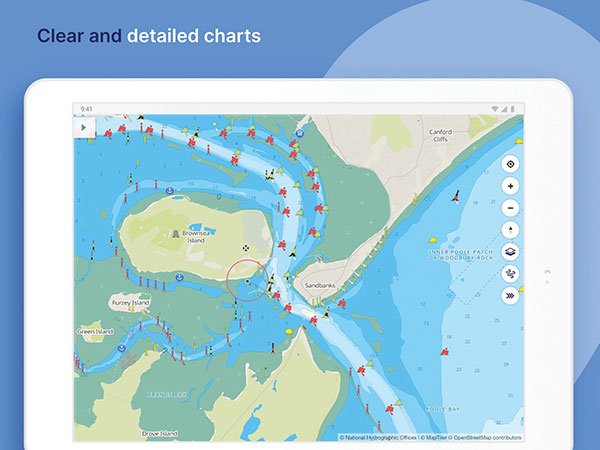
New departure scheduling charts route, wind, tides
Photo: Savvy Navvy
Smartphone app Savvy Navvy now allows boaters to plan better by visually showing the best time to depart given wind and tidal implications, leading to more informed and cost-saving decisions for journeys. By comparing passage times, as well as weather and tide information, boaters can immediately make crucial decisions based on safety, comfort, time and cost. Savvy Navvy is available on Android, iOS, PC and Mac and can be used on an unlimited number of devices simultaneously. It charts, weather, tide, marina details and passage planning with full tidal vectors. Active GPS tracking shows vessel position and enables boaters to instantly check course over ground (COG) and speed over ground (SOG). The app uses UKHO, NOAA and other official hydrographic charts from around the globe, as well as tide data from 8,000 tidal stations.
The Anzen EG-1250 provides a heavy lift, multi-drop, long endurance and flexible platform, expanding the services and operational support offerings from UAS Global Services. With an endurance of six hours, the EG-1250 can carry 75 pounds, cruise at 65 knots, in any weather day or night. The EG stands for an electric and gas dual-engine configuration, with the secondary engine able to power the aircraft or act as a power boost for the primary Skypower rotary SP-180 SRE engine. The Anzen EG-1250 is auto-rotation capable and offers an optional safety parachute system. The flexible platform can support industries such as maritime, agriculture, oil and gas, utility, cargo delivery and intelligence, surveillance and reconnaissance (ISR).
The P330 Pro is a high-performance vertical takeoff and landing (VTOL) fixed-wing UAS for aerial surveying and mapping. It provides high accuracy, long endurance and multiple payloads. It features a 100-Hz differential module, which allows aerial mapping operations at the centimeter level, and a flight endurance with payload reaching more than 150 minutes. The P330 Pro can be used to conduct small- and large-scale aerial surveys with extreme data quality, and is an alternative to manned aircraft for surveying and mapping, mining, construction and infrastructure, environmental monitoring and agriculture.
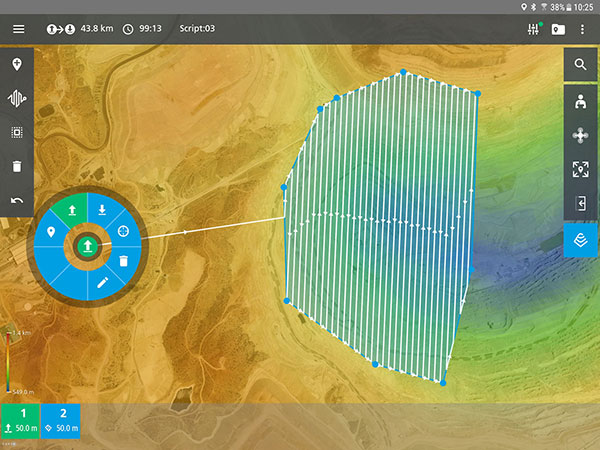
Capability expansion enables M300 for data capture
Photo: Skycatch
Flight1x software now provides data-capture capabilities for the DJI Matrice 300. The Skycatch High Precision Package provides mining operations with cloud or edge-based data processing that enables viewing terrain in 4D, automated RTK/PPK industrial drone management, and fast edge processing with data visibility in minutes. Built on technology adopted by large mining companies, Flight1x includes purpose-built flight automation software for the M300, leveraging DJI’s L1 and P1 sensors. Flight1x is part of the Skycatch High Precision Package, which provides mining operations with cloud or edge-based data processing that enables viewing terrain in 4D, automated RTK/PPK industrial drone management, and fast edge processing with data visibility in minutes.
Offers 5G and artificial intelligence capabilities
Photo: Qualcomm
The Flight RB5 5G platform is designed to accelerate development of commercial, enterprise and industrial drones. Powered by the Qualcomm QRB5165 processor, it condenses multiple complex technologies into a tightly integrated drone system. With 5G and Wi-Fi 6 connectivity, the platform enhances critical flying abilities beyond visual line-of-sight to support safer, more reliable flight. High-performance computing provides power efficiency for artificial intelligence and machine learning, enabling fully autonomous drones. A secure processing unit supports cybersecurity protections. New camera capabilities deliver premium image capabilities and performance. The Flight RB5 5G drone reference design is available through ModalAI. Use cases include mapping, inspection, film and entertainment, defense, security and emergency response, and delivery.
Spirent GNSS Foresight lets operators know where and when unmanned vehicles, air taxis and drones can operate safely and dependably beyond visual line of sight, especially in urban areas where buildings frequently obstruct GNSS signals. The cloud-based solution can produce forecasts using data from any of the world’s satellite constellations, and is of particular interest to the aviation, UAS and automotive industries. Spirent GNSS Foresight’s ability to accurately predict where and when autonomous systems will perform enables users to scale operations or services by expanding operational areas, reducing the number of system disengagements, and providing a greater level of safety and reliability assurance when reducing — or ultimately removing — human involvement in the driving or piloting task.
CGI has been awarded a contract by the European Space Agency (ESA) to develop a proof of concept to enhance the navigational capabilities of airspace users in areas where traditional navigation systems alone cannot provide sufficient performance.
Future aircraft, such as UAVs and innovative air mobility solutions, will need to safely operate beyond visual line of sight (BVLOS) within cities and other built-up areas, where GNSS signals are often disrupted.
The concept being developed by CGI and its partners leverages 5G networks, alongside traditional navigation systems, to provide hybrid-positioning solutions. In addition to secure communications for command and control of vehicles, and delivery of high-quality streaming video for BVLOS operations, 5G networks can also be used as a source for navigational data that will improve the accuracy, integrity and availability beyond that which satellite navigation systems alone can provide. The service will also offer greater resilience against natural or intentional disruption of positioning, navigation and timing (PNT) services.
“The UK is a leading innovator in aerospace and GNSS technology. It’s great to see the team developing resilient PNT solutions for aerospace leveraging existing communication infrastructure,” said Andy Proctor, UK Lead Delegate to the ESA Programme Board for Navigation & PNT Innovation lead at UK Research and Innovation (UKRI). “The 5G-PNT project will enable and promote future aviation applications in the UK and globally, especially in the fast-growing future air mobility sector that will enable wider economic growth in many key sectors.”
“This exciting project brings together PNT and mission-critical systems integration expertise to advance the enabling technologies for future navigation applications,” John Hanley, Senior Vice President for UK & Australia Secure and Assured Space Solutions at CGI said. “The challenges posed by PNT service disruption have become a significant concern for operators and regulators and this project will help improve navigation capabilities to support both this challenge and further development of the aerospace sector.”
CGI will work with ESA, u-blox, the Advanced Communication, Mobile Technology and IoT (ACMI) Research Centre at the University of Sussex and air navigation service provider NATS, to define use cases and system requirements for a 5G-based complement to existing GNSS receivers. This hybrid navigation solution will be targeted at installation on any air vehicles intended to operate within the coverage of commercial 5G networks.
The project will culminate in a real-world demonstration of the technology, comparing its performance to that offered by GNSS alone.
Autonomous racecar competition takes place at the Indianapolis Motor Speedway
The Indy Autonomous Challenge will be livestreamed on Oct. 23 through Amazon Web Services for viewers worldwide. Teams from 21 universities from nine countries will compete for the $1 million grand prize, which will be used to advance the education and research missions of the winning universities.
Livestreaming begins at 1 p.m. EDT and can be viewed on the IAC website homepage and on Twitch @IndyAChallenge.
“Due to the generous support of Amazon Web Services (AWS), we will have a global audience for the first autonomous high-speed competition at the Racing Capital of the World — the Indianapolis Motor Speedway,” said Paul Mitchell, president and CEO, Energy Systems Network, co-organizer of the IAC. “This is critically important as the IAC is a global competition having involved at its inception 41 universities from around the world.”
Organized by Energy Systems Network and the Indianapolis Motor Speedway, the primary goal of the IAC is to advance technologies that can speed the commercialization of fully autonomous vehicles and deployments of advanced driver-assistance systems (ADAS). These enhancements will lead to increased safety and performance in motorsports as well as all modes of transportation.
In addition, the competition is a platform for students to excel in science, technology, engineering and math (STEM) and inspire the next generation of innovators.
AgEagle will acquire senseFly, a Parrot Group subsidiary, for US$23 million.
AgEagle Aerial Systems Inc. is a a provider of drones, sensors and software, and Parrot is a European drone company. Founded in 2009, senseFly develops and produces a proprietary line of eBee-branded, high performance, fixed wing drones for professional use.
The eBee Geo drone was introduced in March. (Photo: SenseFly)
The development positions AgEagle to provide a full-stack fixed-wing drone solution for agriculture, government, engineering and construction, among other industry verticals. SenseFly also brings to AgEagle solid engineering talent focused on advanced research and development, a well-established global reseller network, and a strong portfolio of intellectual property, AgEagle stated in a press release.
The eBee drones are designed to be safe, ultra-light and easy to use. They are in use by thousands of customers around the world in agriculture, government, engineering and construction to collect aerial data. Headquartered in Lausanne, Switzerland, senseFly employs 90 people, generating total annual revenues of US$12.5 million in 2020.
“Recognized as the producer of the world’s most widely used fixed wing drones, senseFly is an ideal strategic fit for AgEagle,” said Brandon Torres Declet, chief executive officer of AgEagle.
Moving forward, Parrot will focus its expertise and resources on the growth of its professional quadcopter drone equipment and drone data analysis software activities, according to Parrot founder and CEO Henri Seydoux. “The transaction will provide additional cash and lower operational expends to drive Parrot’s growth and industry standing,” Seydoux said. “With the capabilities of the ANAFI line of professional drones and of the Pix4D software suites, Parrot will continue to address its core market segments: 3D mapping, surveying and inspection, agriculture, and defense and security.”
In tandem with the closing of the acquisition, which is expected shortly, Labossiere will resign as CEO of senseFly. Michael O’Sullivan, who previously served as the company’s head of global marketing, will be appointed managing director of the new AgEagle subsidiary. All other senseFly employees will retain their current responsibilities.
For details relating to the terms and conditions of the acquisition, refer to the Form 8-K to be filed by AgEagle with the U.S. Securities and Exchange Commission upon closing of the transaction and accessible at www.sec.gov.
In a slight expansion from our previous monthly UAV newsletter columns, we’re now looking at autonomous systems with a wider outlook, capturing the automated world as it evolves.
The Eve air taxi. (Image: EmbraerX)
News this month covers steps toward air taxi qualification, highly challenging underground UAV and robotic capers, and long-distance watercraft autonomy in Denmark.
EVE gets order boost by Bristow
We’ll soon be seeing them — electric powered manned and unmanned flying taxis buzzing in the city skies above us. Embraer, the Brazilian commuter aircraft manufacturer (you might have taken their EMB-1xx series turboprop aircraft on short hauls between city centers) has apparently progressed its Eve manned/unmanned aircraft development to the stage of a program for qualification/certification being scoped by EmbraerX in Florida and the Bristow Group.
Parent company Embraer established EmbraerX in Melbourne, Florida, as a new-concept UAV developer and manufacturer, launching the Eve urban mobility vehicle as its first product.
Eve subscale demonstrator. (Photo: EmbraerX)
Although we are still only seeing concept-artist renderings of the Eve eVTOL (electric vertical take-off and landing) aircraft, and photographs of a small-scale flying prototype, Embraer has already built an impressive order book. There are reports of more than 500 orders on hand, originally led by Uber and recently joined by the Bristow Group with an order for 100. All orders are likely contingent on aviation agency approval of the aircraft for public transportation.
Based worldwide, Bristow has been around in one form or another since 1955, and currently operates more than 250 helicopters in support of the oil and gas industry, search and rescue (SAR), and various military-related applications, including unmanned aircraft operations with the U.S. Coast Guard. This experience is expected to aid EmbraerX through a joint program to eventually gain an operating certificate for the Eve air taxi.
An Elios drone from team CERBERUS roams a moulin in an earlier challenge. (Photo: DARPA)
DARPA’s Subterranean Challenge
The U.S. Army’s Defense Advanced Research Projects Agency (DARPA) has been running a competition since 2018 to find unmanned products and technologies that can find their way around underground environments such as subway systems, sewers, mines and naturally occurring caves and tunnels. The object is to rapidly and remotely map, navigate and search these complex underground locations.
Known as DARPA’s Subterranean Challenge, several groups of competitors were slimmed down to three very capable teams over several months through some initial selection evaluations. Then, on final competition day, teams CSIRO Data61, CERBERUS and MARBLE went at it in an array of challenging environments at the Louisville Mega Cavern — a massive retired limestone mine so large it not only hosts a ropes course and a mountain bike park, but also has tram-guided tours for visitors.
Finalists in the competition had to navigate through elements from previous events, including simulated underground mines, a metropolitan infrastructure, and cave systems. Smoke was even used in places to increase the confusion.
Team CERBERUS — an international consortium that included the University of Nevada Reno (UNR), ETH Zurich, the Norwegian University of Science and Technology (NTNU), the University of California Berkeley, the University of Oxford, Flyability, and the Sierra Nevada Corporation — was ultimately successful.
The ANYmal climbs stairs. (Photo: ANYbotics)
In previous phases of the competition, Flyability used its caged Elios 2 UAV with video and thermal cameras and a high-intensity LED lighting system to create accurate internal maps of underground spaces. However, in the final competition, ANYbotics four-legged ANYmal C autonomous robots were primarily employed — carrying visual and thermal cameras, lidar and a spotlight.
In the final competition, Team CERBERUS managed to locate and identify 23 of 40 hidden “artifacts” in the allocated time and earned the $2 million DARPA first-place prize.
Autonomous Tugboat round Denmark
Sea Machines in Boston has been around since 2015, focusing on automating shipping control and monitoring. It hopes to bring a system to market that will enable an autonomous voyage all the way around Denmark.
With investors who include Toyota Ventures, Huntington Ingalls, Brunswick Corporation, Accomplice and Dolby Fund, the company is not a mega-million venture, but has still successfully engaged the likes of A.P. Moller-Maersk, the U.S. Department of Transportation and the U.S. Navy in autonomous waterborne projects.
The tugboat Nellie Bly on its 1,000 nm circumnavigation of Denmark will use an SM300 autonomous system that uses radar, inertial navigation, a depth transducer, the automatic identification system (AIS) and video cameras for obstacle avoidance. It will provide high-definition remote situation awareness to monitoring controllers in Boston, 3,600 miles away.
Autonomous tugboat Nellie Bly. (Photo: Arie Boer)
Throughout the voyage, the Nellie Bly will have two professional pilots onboard, and will stop at ports along the way to demonstrate the technology. Sea Machines will stream the journey live on a website with updates from the ship, the crew and the command center, enabling real-time and recorded access to “The Machine Odyssey” as the project is now known.
To sum up, lots of autonomous projects are proceeding, with progress toward getting air taxis up and running for business, DARPA sponsoring technology for underground navigating, and mapping and long-distance autonomous navigation around Denmark — lots of diversity and opportunity.
The mdCockpit app from Microdrones was designed for professional drone users to make it easy to plan, monitor, change and control flights from an Android tablet.
The latest updates — in mdCockpit 2021.3 — include new features that improve flight safety and give more options for surveying in an aim to deliver a premier solution for planning, monitoring, adjusting, analyzing and controlling professional drone flight missions right from a tablet. Robert Chrismon, the marketing manager, and Maude Morin, Software Product Owner discuss the updates in the video below.
Key updates for mdCockpit version 2021.3 are in the Flight Editor, Flight Data and Drone Configuration components of the app.
FLIGHT EDITOR
New layers section in Mission Dashboard
KML as a background layer
Optimized entry point on corridors
FLIGHT DATA
Displays last position of the drone
Drop renamed to Descent in Quick Height Change dialog
Telemetry alerts
DRONE CONFIGURATION
New maintenance program fields in drone config
Reminder of the next inspection or service
Read only homing height
Drone pilots can download mdCockpit onto their Android table through the Google Play store.
RedTail Lidar Systems has delivered six lidar systems to the 707th Ordnance Company stationed at Joint Base Lewis-McChord. The systems will provide explosive ordnance disposal (EOD) technicians an opportunity to assess how lidar can be used to enhance their operations.
The RedTail Lidar Systems RTL-450 was integrated onto the Teledyne FLIR SkyRaider unmanned aerial system (UAS) to address a broad range of the EOD community’s 3D mapping needs. Captain William R. Hartman, the commander of the 707th EOD Company, stated that the highlight of the testing was using the lidar system to map terrain.
The RTL-450 also can be used to calculate crater volumes from improvised explosive device (IED) blasts, perform route planning for unmanned ground vehicles, aid in mission planning, and conduct surveillance. The 3D point clouds generated allow operating areas to be viewed from any perspective using the rotation and zoom capabilities provided within the viewer software.
The underlying lidar technology used in the RTL-450 was licensed from the Army Research Laboratory (ARL). The micro-electromechanical (MEMS) mirror-based design provides enhanced 3D imagery suitable for applications where artificial intelligence and machine learning (AI/ML) algorithms can be used for target detection and classification, because of the high point density of the point clouds.
The system can operate in either a raster scan mode for surveillance missions or a side-to-side line scan mode for area mapping while the UAS is flying. The intuitive command and control, high brightness display integrated into the ground control station (GCS), and real-time 3D map generation allows operators to begin mission planning and analysis even before the mapping or surveillance missions are completed.
“Delivering these six lidar systems to EOD technicians for test and evaluation is a significant step forward in using MEMS mirror-based lidar technology to address a broad range of Department of Defense 3D mapping needs,” said said Brad DeRoos, president and CEO of RedTail Lidar Systems. In addition, this delivery represents a true success story in transitioning a technology out of a Department of Defense laboratory and back into the hands of military operators.”
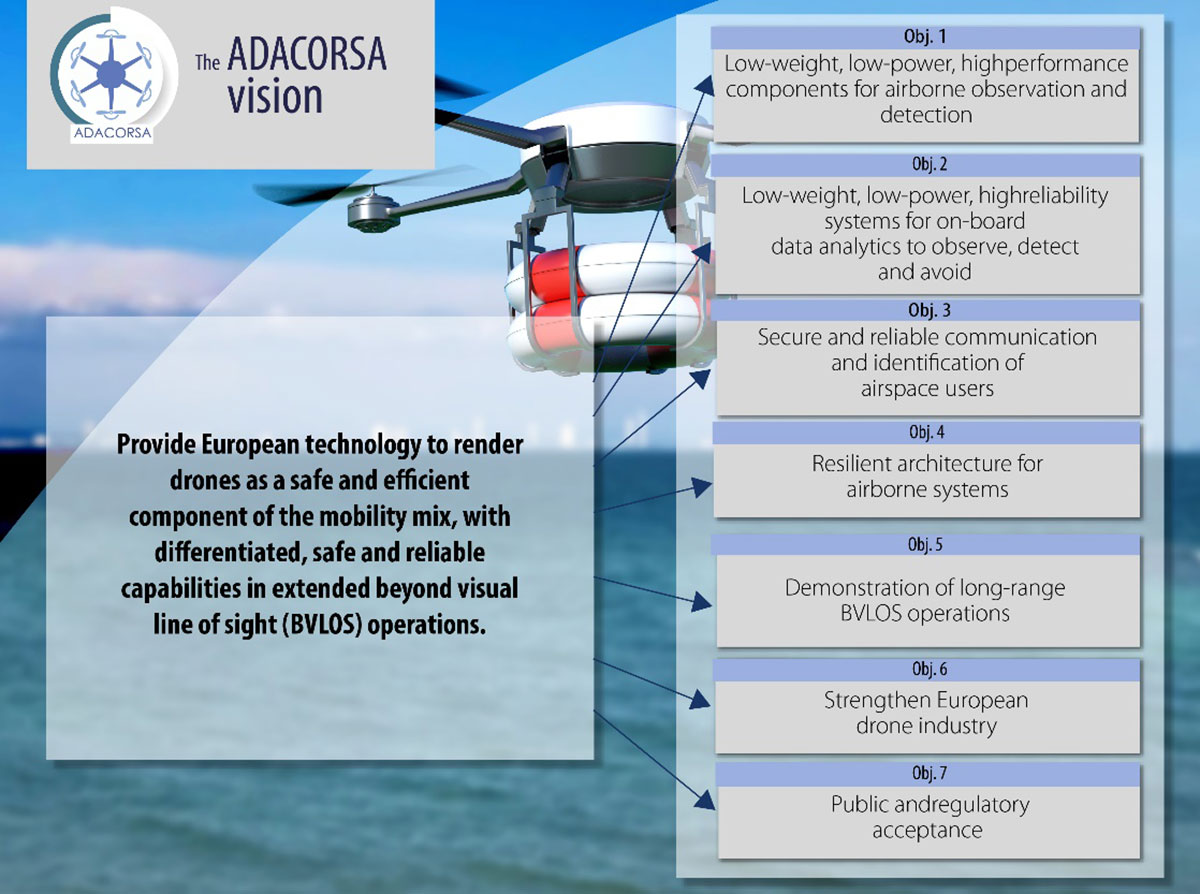
Celestia Technologies Group (CTG) is taking part in the ADACORSA project, a European initiative designed to unlock the potential of long-range and beyond-visual-line-of-sight (BVLOS) drones and give Europe a world-class drone industry.
ADACORSA — Airborne Data Collection on Resilient System Architecture — is a major collaborative project launched in May 2020 that aims to demonstrate the safety and efficiency of drones or unmanned aerial vehicles (UAVs) in extended out-of-line-of-sight operation ranges.
Specifically, it draws on European expertise in developing sensor and communication technologies for UAVs to underpin their role and reliable capability in long-range applications, including observation, analysis and transport, taking them one step further toward being integrated into conventional airspace.
ADASCORA also seeks to increase public and regulatory acceptance of modern UAV or drone technology. More than 49 specialist companies from 12 European countries are expected to contribute know-how and practical support. The project also aims to research and develop innovative components and systems for airborne observation and detection, telecommunication and data processing along the electronics value-chain.
Task Forces Established
To meet ADACORSA’s ambitious targets, task forces have been set up, one of which will be led by CTG. The company will lead the development of electronic components for reliable and fail-operational environment perception and run one project demonstrator designed to integrate unmanned aircraft systems safely into the common European airspace and ensure that they operate correctly in a multi-unmanned aircraft system environment.
CTG is a Dutch supplier and part of a pan-European company group providing innovative technology products, systems and services to space, aerospace, defense, telecommunications and scientific markets.
Galileo + EGNOS Transponder
CTG will use its expertise in on-board UAV electronics to develop a lightweight, high-performance transponder capable of sending and receiving accurate identification and location data for unmanned aerial vehicles.
Positioning will be based on Galileo, supplemented by its European Geostationary Navigation Overlay Service (EGNOS), allowing all airspace users to know the location of the vehicle and contribute to safety while supporting other on-board systems such as detect-and-avoid equipment.
The transponder will be based on conventional aviation technologies such as Mode S Interrogator and Automatic Dependent Surveillance-Broadcast (ADS-B) and will integrate new concepts including network identification, meaning the vehicle can fly safely in various scenarios. These include in locations close to airports, in drone fleet operations and within the U-Space environment. U-space is a set of European services and procedures designed to support safe, efficient and secure access to airspace for drones.
ADACORSA has received funding from the ECSEL Joint Undertaking (JU) under grant agreement No. 876019. The JU receives support from the European Union’s Horizon 2020 research and innovation program and Germany, Netherlands, Austria, Romania, France, Sweden, Cyprus, Greece, Lithuania, Portugal, Italy, Finland and Turkey.