My April column addressed the vertical movement at the NOAA CORS Network (NCN). The values at the sites indicate the potential movement of marks in the area of the CORS. The rates are based on GNSS data and have an estimate of error associated with them.
As I mentioned in my previous column, I’m not sure how the National Geodetic Survey (NGS) will address the vertical movement effects in the new, modernized National Spatial Reference System (NSRS). That said, NGS will be monitoring the CORS and looking for trends to help describe the vertical movement at the CORS. These trends are an indication of what may be happening in that area.
As stated in previous columns, orthometric heights in NAPGD2022 will be defined through ellipsoid heights and a geoid model, for example GEOID2022. In addition to the movement of individual marks due to crustal movement, there are geophysical reasons for changes in the geoid that affect the orthometric height of a mark. Therefore, changes in the geoid model will be very important to users estimating orthometric heights using GNSS.
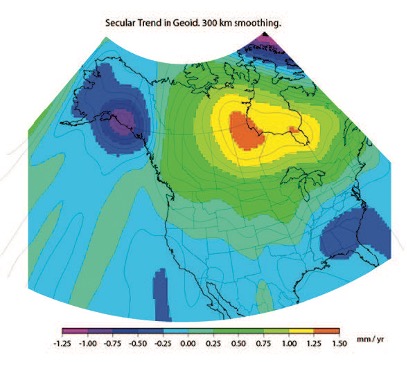
As stated in the NOS NGS 64 report, NGS has set a goal of maintaining geoid accuracy at 1 centimeter (1 standard deviation) in both absolute and differential geoid undulations. The box titled “Figure 13 from NOS NGS 64 Report” depicts an estimate of the secular change in the geoid. As indicated in the plot, the changes are very small, ranging from -1.25 mm/year to 1.5 mm/year.
What I find interesting is the small negative change in the southeastern United States. There are other drivers for geoid changes. This column will address some of these changes and what they mean to users.
Secular geoid change
Figure 13 from NOS NGS 64 Report (Image: NGS)
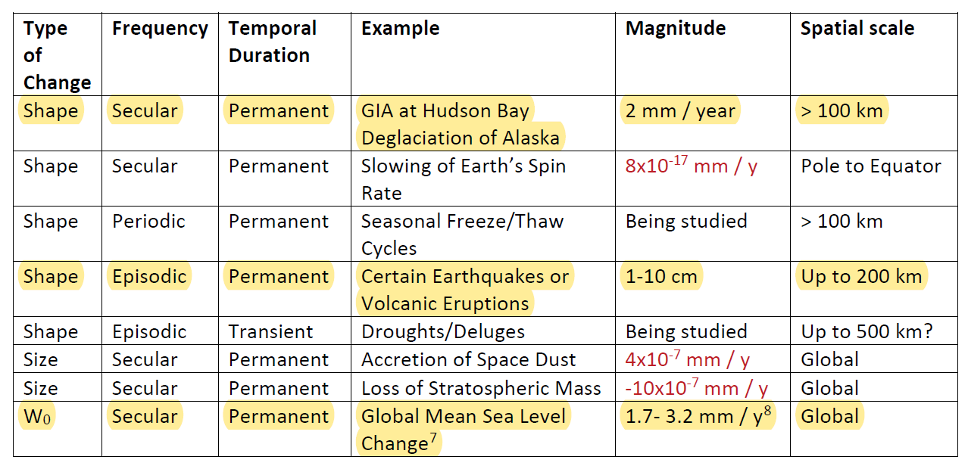
As mentioned in many of my articles, the new, modernized NSRS has a time-dependent component. This includes the geoid model. Table 5-1 from NOS NGS 64 report are examples of some of the physical processes being investigated by NGS to account for changes in the geoid. (See the box titled “Some of the geophysical drivers of geoid change.”)As mentioned in the NOS NGS 64 report, the magnitudes in red have already been determined to be too small for NGS to model. The examples highlighted in yellow have magnitudes that are significant and NGS will attempt to account for these changes to the geoid.
Table 5-1: Some of the geophysical drivers of geoid change
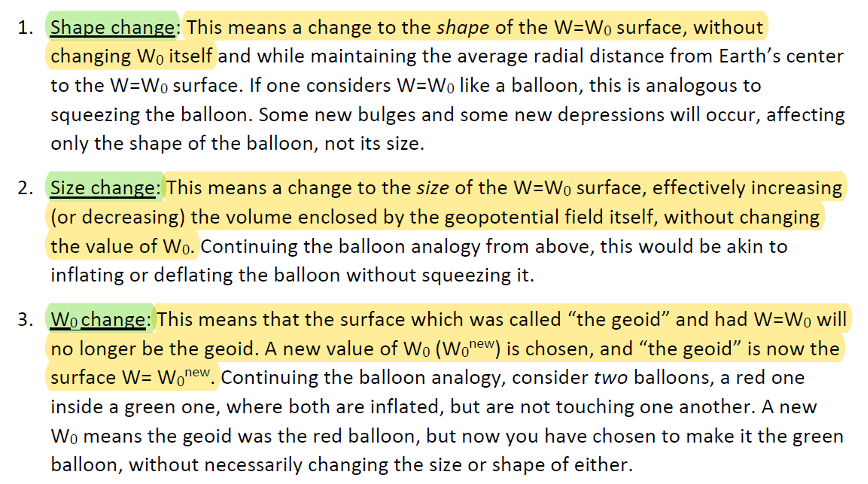
NGS classifies the changes in the geoid in three different groups: Shape Change, Size Change, and W0 Change. The box titled “The Groups of Geoid Change” provides NGS’s definition and explanation of the terms.
The groups of geoid change
NGS’s report on their Geoid Monitoring Service (GeMS) program provides figures that depict an estimate of the secular geoid rate trend based on the NASA GSFC mascon model. See the boxes titled “Estimate of Geoid Rate Over CONUS” and “Estimate of Geoid Rate Over Alaska.” For more details on GeMS, download the report NOAA Technical Report NOS NGS 69: A Preliminary Investigation of the NGS’s Geoid Monitoring Service (GeMS), and read my December 2019 Survey Scene column. The secular geoid rate trend is an example of the geoid changing its shape, but not the W0 value. What this means is that the local geoid undulations will change, but the overall size of the geoid will not.
Estimate of geoid rate over CONUS
Figure 32: Geoid rate over CONUS based on the GSFC mascon model [mm/yr] (Image: NOAA)Estimate of geoid rate over Alaska
Figure 33: Geoid rate over Alaska from GSFC mascon model [mm/yr] (Image: NOAA)These changes in the geoid are fairly small values (+/- 1.3 mm/year), but they will accumulate over a decade. As previously stated, NGS’s goal is to maintain geoid accuracy at the centimeter level (1 standard deviation) in both absolute and differential geoid undulations. In my February 2022 column, I discussed how coordinates change because Earth’s surface is moving due to the movement of major tectonic plates. It’s fairly obvious how the tectonic shift affects horizontal coordinates, but earthquakes and volcanic eruptions can also cause large shifts in vertical coordinates.
In recent history, on May 18, 1980, geologists watched in awe as Mount St. Helens erupted in a gigantic explosion. After the eruption, the volcanic cone of Mount St. Helens had been completely blasted away; the peak, which was at an elevation of 9,677 feet (2,950meters) was changed to a horseshoe-shaped crater with an elevation of 8,363 feet (2,549 meters). Extreme crustal movements such as the Mount St. Helens eruption can change the shape of the geoid. As explained in my April 2022 newsletter, NGS understands this and is attempting to manage the changing coordinates by providing a time-dependent component to a mark’s ellipsoid height, but there is also a time-dependent component to the geoid that affects the mark’s orthometric height.
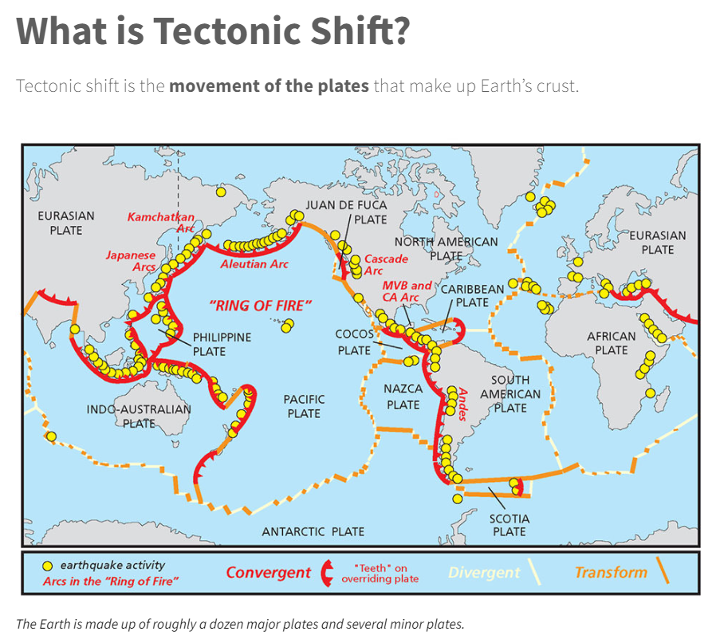
Ring of Fire
Image: National Ocean Service
The “Ring of Fire” map highlights earthquake activities around the world. As indicated in Table 5.1, earthquake or volcanic eruptions can change the shape of the geoid. Of course, they also can change the height of a mark due to crustal movement, which would typically be larger than the change in the geoid height. The amount of movement would be due to the size and magnitude of the event, but even small earthquakes could cause a change in the height of a mark located near the event. Earthquakes are occurring all over the world every day.
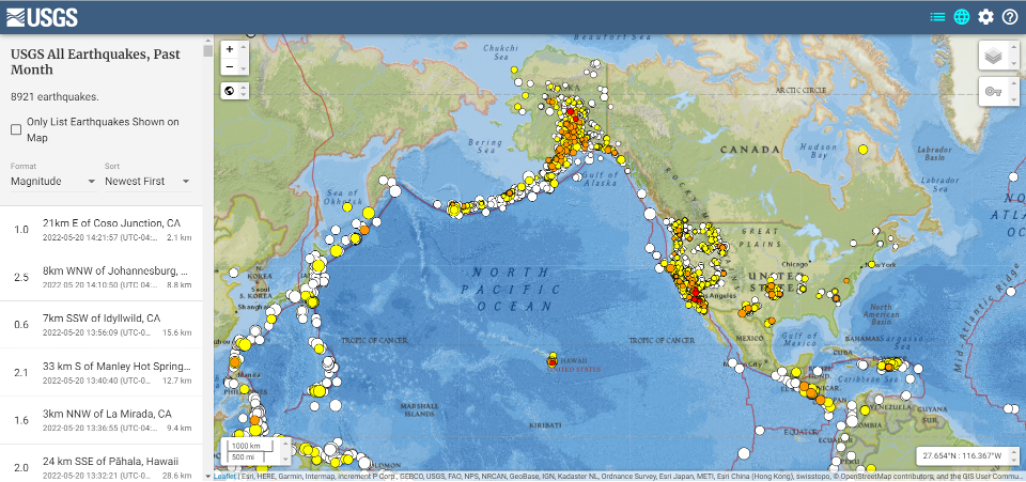
Earthquakes with large magnitudes are highlighted by news media outlets, but ones with smaller magnitude typically are not highlighted. The four figures below provide examples of earthquakes that have occurred over 30 days. This information can be obtained from the United States Geological Survey (USGS).
Earthquakes during the past 30 Days Date: May 20, 2022
Image: USGS
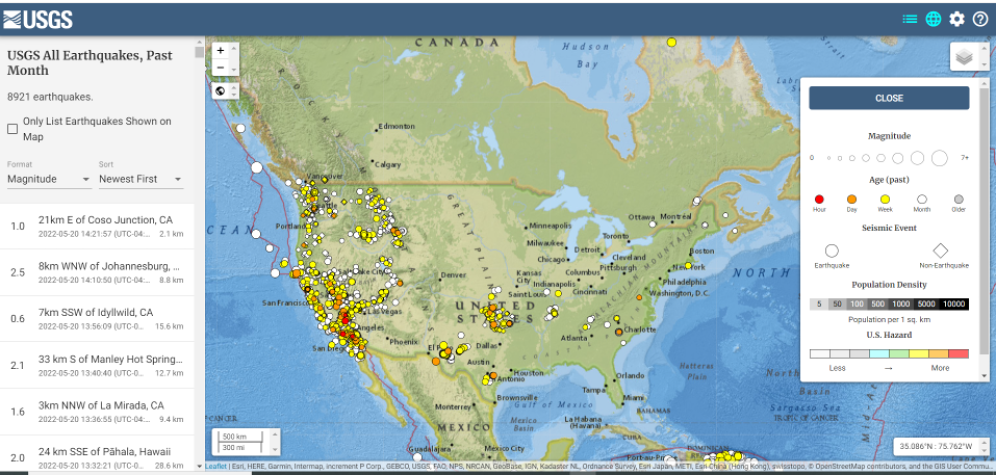
Earthquakes in the lower 48 during the past 30 days Date: May 20, 2022
Image: USGS
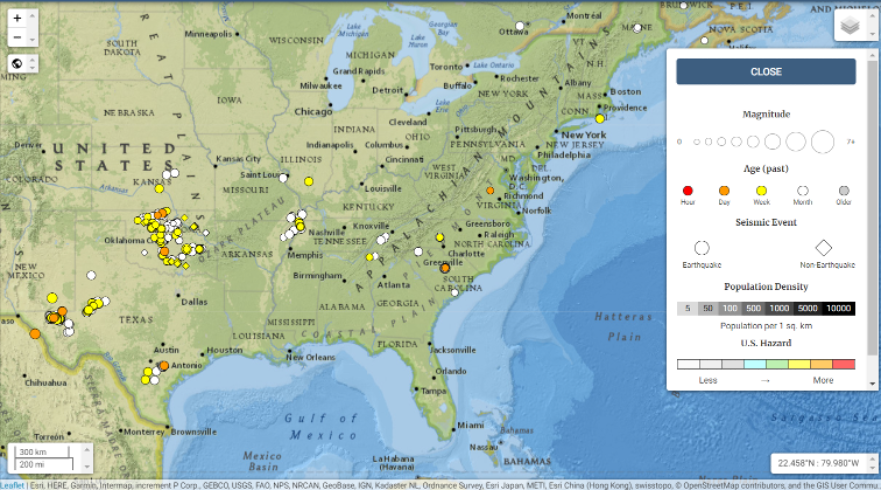
Earthquakes in eastern United States in the past 30 days Date: May 20, 2022
Image: USGS
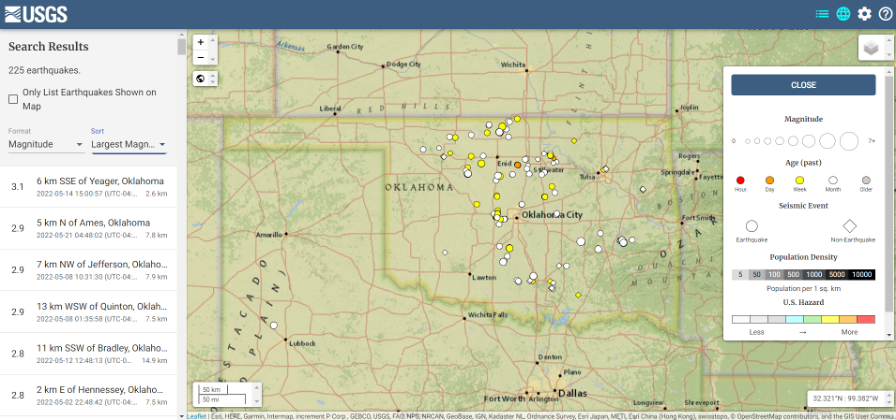
I found the large number of earthquakes that occurred in Oklahoma in just 30 days to be very interesting. This isn’t something that I thought occurred in the eastern region of the United States.
Earthquakes in Oklahoma during the past 30 days
Date: May 20, 2022
Image: USGS
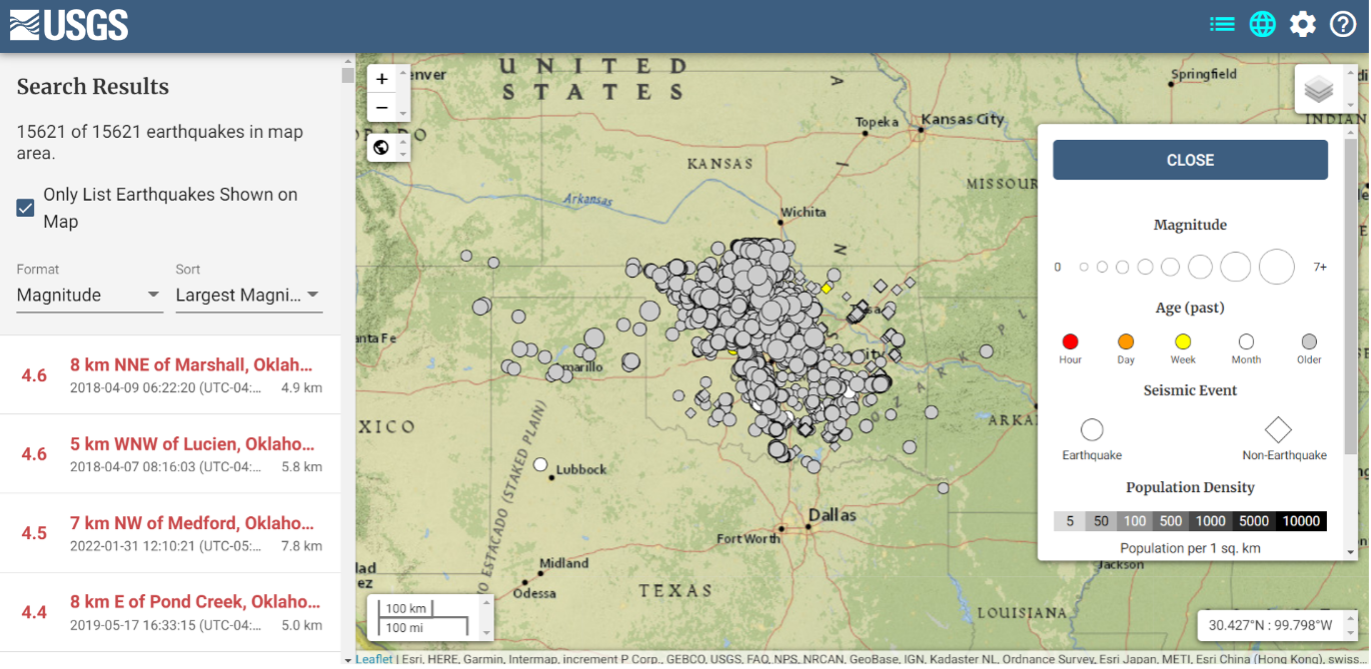
The image below depicts earthquakes that have occurred in Oklahoma in the past five years. They are fairly small in magnitude, but what is the cumulative effect on the geoid in the region, as well as changes to the orthometric heights of marks due to crustal moment in the region? This is why it is important for the new, modernized NSRS toimplement time-dependent coordinates.
Earthquakes in Oklahoma in the last 5 years Dates: 2017 to 2022
Image: USGS
To better understand the changes to the geoid, NGS performed a survey in Alaska to obtain geodetic data as part of its GeMS program. On May 12, 2022, Kevin Ahlgren, a geodesist at NGS, described in a webinar the observations collected and some of the results.
The presentation provided an overview of a field campaign performed in support of the GeMS program and a time-dependent geoid model. The campaign included static GNSS, relative gravity, and deflection of the vertical techniques on 50 stations in Alaska. The webinar was can be downloaded.
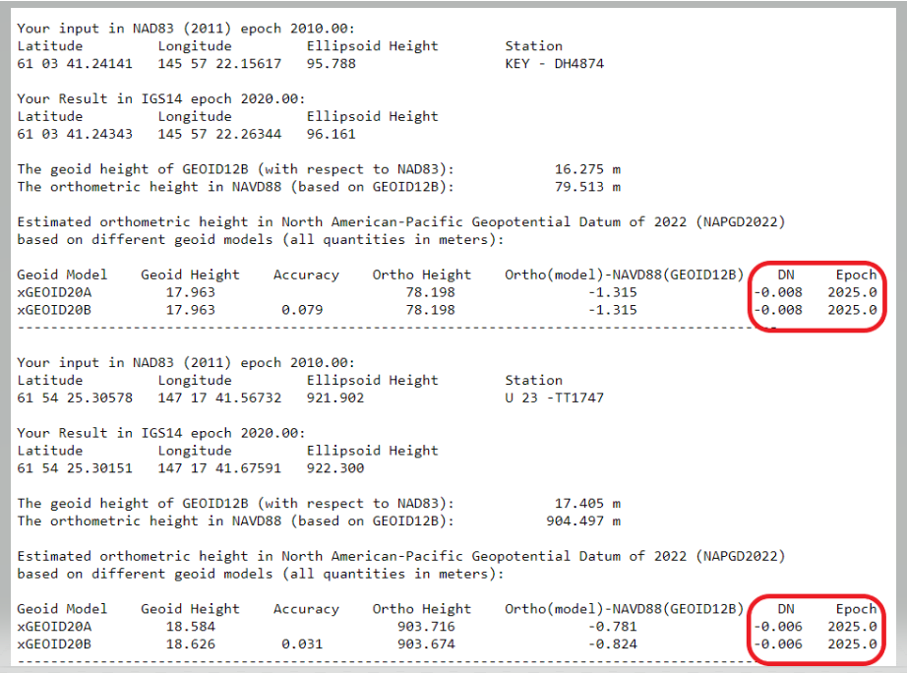
I encourage everyone to download the presentation. The change in the geoid due to geophysical drivers is small, but if the new, modernized NSRS is going to include time-dependent coordinates, then changes in the geoid must be accounted for. For demonstration purposes, NGS provides an example of the time-dependent geoid change in the xGEOID20 webtool. The box below, “xGEOID20 interactive computation output,” is an example of using this tool. The two stations are located in Alaska. As indicated in the output from the tool, the change in the geoid is 8 mm in five years. Again, NGS’s goal is to maintain geoid accuracy at the centimeter level (1 standard deviation) in both absolute and differential geoid undulations. These small changes can become significant over time.
xGEOID20 interactive computation output
Note: DN is the time-dependent geoid change computed between user inputted epoch (t) and t. (Image: NGS)
The last geoid change group that I’ll highlight has to do with the change in the gravity potential (W0) value that defines the model. The NOS NGS 64 Report states that the standing definition of the geoid, as adopted and used at NGS, is the following:
The geoid is the equipotential surface of the Earth’s gravity field which best fits, in a least squares sense, global mean sea level.
As stated in the NOS NGS 64 report, over a century of sea-level measurements imply that global mean sea level (GMSL) was rising at a rate of approximately 1.7 millimeters per year and was rising at a rate of 3.2 millimeters per year between 1993 and 2010 (IPCC, 2014). If NGS is going to define the geoid as theequipotential surface of the Earth’s gravity field that best fits, in a least squares sense, global mean sea level, then the geoid in the new, modernized NSRS must change when the GMSL exceeds a certain threshold.
Again, NGS’ goal is to maintain geoid accuracy at the centimeter level (1 standard deviation) in both absolute and differential geoid undulations. What this means is that as GMSL rises, the value of gravity potential which best fits to GMSL (called W0) will also change. In other words, the surface which was called “the geoid” and had W=W0in 2022 will no longer be the geoid. A new value of W0 (W0new) is chosen, and “the geoid” would now be the surface W=W0new.
So, what does this really mean to users? The NOS NGS 64 Report states on page 37:
“NGS and the Canadian Geodetic Survey have jointly adopted the value of 2.0 m^2/s^2 as the replacement threshold for a new geoid model (and new geopotential datum). This represents approximately 20 centimeters of GMSL (and thus geoid) rise. At the current rate of sea-level change of about +3 millimeters per year (IPCC, 2014), this means NGS expects to replace NAPGD2022 in approximately 60 to 70 years.”
Therefore, this should not be a major concern of users for a long time.
This column highlighted that orthometric heights in NAPGD2022 will be defined through ellipsoid heights and a geoid model, for instance GEOID2022; and therefore, changes in the geoid model will be very important to users estimating orthometric heights using GNSS. It briefly described the geophysical reasons for changes in the geoid that affect the orthometric height of a mark.
If NGS is going to meet the goal of maintaining geoid accuracy at 1 centimeter (1 standard deviation) in both absolute and differential geoid undulations, they will have to address changes in the geoid. The secular changes in the geoid, as indicated in Figure 13 in the NOS NGS 64 report, are very small, ranging from -1.25 mm/year to 1.5 mm/year. Once again, these are small changes to the geoid, but they will accumulate over time, and that is why NGS is including time-dependent coordinates in the new, modernized NSRS.
We all need to be careful that the numbers we are throwing around to support our case aren’t really undermining it.
Dana Goward, President, Resilient PNT Foundation
Over the last several weeks, I have repeatedly heard government officials and others talking about the value of GPS to the U.S. economy.
In each case they cited a 2019 report sponsored by the National Institute of Standards and Technology. It determined that, if GPS services were to go away, the U.S. economy would lose one billion dollars a day.
A billion dollars is a lot of money.
Yet the U.S. annual gross domestic product is more than $22 trillion a year. That’s more than $60B a day. One billion dollars is less than 1.7%.
That just doesn’t seem right.
A member of the White House’s National Security Council said “GPS is still a single point of failure” for America. That sounds like a pretty big hit to the economy. Not to mention our national security.
GPS signals are critical for networks, transportation, communications, power grid operations, first responders…virtually every critical infrastructure. If they go away, the U.S. GDP will certainly suffer much more loss than 1.7%. The economy would likely go from growing to shrinking and continue that way for quite a while.
I don’t know exactly how much the U.S. will suffer if GPS suddenly goes away, but I am sure it will be a lot. Texas alone lost an estimated $195 billion with at least 57 dead as a result of its February 2021 week-long power crisis. Although not caused by a GPS outage, the number gives us real-world benchmarks for the impacts of a major tech infrastructure failure.
If GPS fails, there will certainly be more accidents while people across the nation get used to it not being available. First responders will have a much harder time getting places and using land mobile radios. All kinds of essential services will be disrupted. More people will die than would have been the case otherwise.
In December 2021, a member of the White House’s National Security Council said “GPS is still a single point of failure” for America. That sounds like a pretty big hit to the economy. Not to mention our national security.
The authors of the NIST-sponsored study were undoubtedly diligent. But they were faced with an impossible task – to quantify the unquantifiable. And like any analysis, they were limited in what they could do by the available time, money, and hard data. They were asked for a number. They delivered one that could be easily supported.
A billion dollars is a lot of money. It might be a fairly impressive sound bite for general audiences.
Government budget analysts and policy makers, though, are accustomed to dealing with dollars in the hundreds of billions and trillions. A billion a day, while not chump change, is not a major issue.
Protecting GPS and ensuring the nation has resilient positioning, navigation and timing services are major issues.
We all need to be careful that the numbers we are throwing around to support our case aren’t really undermining it.
Dana A. Goward is president of the Resilient Navigation and Timing Foundation.
A roundup of recent products in the GNSS and inertial positioning industry from the May 2022 issue of GPS World magazine.
SURVEYING
Measurement Workflows
Field-to-office inspection with survey-grade accuracy
Photo: Trimble
Trimble Access field software now connects with Infotech’s Appia service to streamline the workflow from survey to construction. Aimed at the inspection process for civil infrastructure projects, the software provides high-accuracy measurement workflows for daily work reports and inspection reporting for engineering, construction and public agencies. By streamlining the connection between data collected by Trimble GNSS rovers and simultaneously syncing Trimble Access, Infotech Mobile Inspector and Infotech Appia, inspectors can now complete their daily work reports more efficiently in the field and reduce errors. With manual processes removed, inspectors can more accurately represent infrastructure assets.
For surveying, mapping and construction professionals
Photo: CHCNav
The i83 GNSS receiver is powered by a multi-band GNSS receiver, iStar technology, and a calibration-free, high-end inertial measurement unit (IMU) for faster and reliable field GNSS surveying. The third-generation high-gain antenna with advanced CHCNAV iStar algorithm improves GNSS satellite signal tracking efficiency by more than 30%. The i83 GNSS receiver features 1,408 GNSS channels for high performance across GPS, GLONASS, BeiDou, Galileo and QZSS constellations. Its onboard GNSS technology delivers centimeter-level positioning, maintains reliable fixed real-time kinematic (RTK) accuracy, and collects points faster than previous models, even in demanding conditions. The i83 receiver’s built-in IMU automatically compensates for pole tilt. In less than 5 seconds, the 200-Hz inertial module is initialized to ensure survey-grade accuracy over a pole-tilt range of up to 30 degrees. Productivity is dramatically increased, RTK usability greatly improved, and potential human error reduced, whether you are an engineer, site foreman or surveyor.
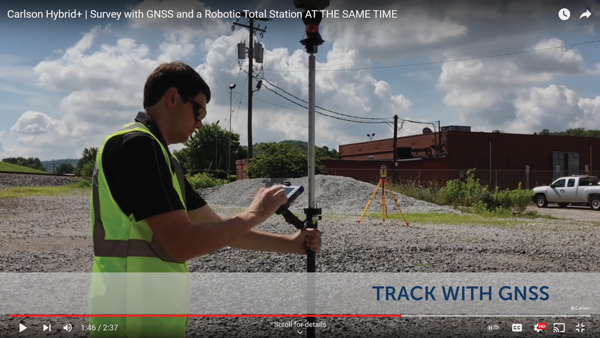
Simplifies surveying with both GPS and total station
Photo: Carlson Software
SurvPC Hybrid+ is a module for SurvCE version 6 software that enables surveying with mixed brands of GNSS receivers and total stations. SurvCE is a data-collection software package from Carlson Software. SurvPC Hybrid+ provides driver support for numerous devices, allowing the surveyor to interface with both types. Features include Follow Me, Smart Lock, Smart Staking, Cross Check, Backup Tracking, Hybrid-Resection, Auto-Localize, and Easy Setup Wizard.
SurPad 4.2 is designed to help surveyors work efficiently at all types of land surveying and road engineering projects in the field. It runs on eSurvey handhelds, Android smartphones and tablets, and third-party Android devices. It integrates with professional receiver control, point collection, stakeout, geographic information system (GIS) data collection, road measurement, road design, cross-section measurement and railway stakeout. SurPad 4.2 provides multiple operation and communication systems, has mapping and CAD functions, and has a coordinate system. It also includes a survey mode encompassing topo, control, quick point and COGO civil engineering programs.
The Leica AP20 AutoPole provides tilt compensation, automatic pole-height readings and unique target identification for automated total stations. It combines an intelligent sensor module with the AP Reflector Pole and operates with existing Leica Geosystems’ automated total stations to create a solution for autonomous workflows. Tilt compensation decreases measurement time and increases flexibility and safety on site by enabling measurement of points in inaccessible or risky locations. By updating the pole height automatically in the field software, the system ensures that the height on record is always correct.
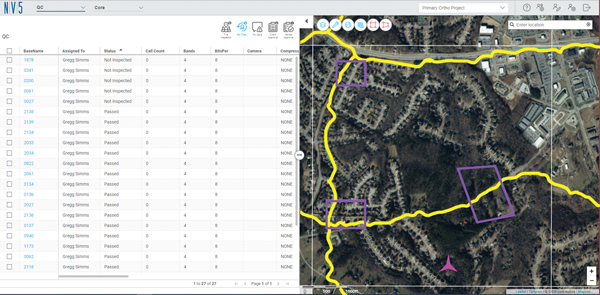
INSITE Data Reviewer moves geospatial data validation to the cloud, giving key stakeholders the ability to collaborate in real time. The third module in the INSITE Lifecycle suite of products, INSITE Data Reviewer provides reviewers real-time access to aerial imagery, lidar data and geographic information system (GIS) layers via the cloud to standardize quality control. This increases data validation speed and reduces costs of geospatial projects. The INSITE Lifecycle suite combines Project Tracker, Data Delivery and Data Reviewer modules through which users can see their projects executed on a map, from data acquisition through processing.
Eos Laser Mapping for ArcGIS is now available on Android devices. It allows mobile crews to capture high-accuracy laser offsets directly into ArcGIS Field Maps with Arrow Series GNSS receivers. The solution combines technology from geographic information system (GIS) provider Esri, laser rangefinders from Laser Tech, and Eos’ own Arrow Series GNSS receivers. The release supports three workflows: standard laser offset (range-azimuth), range-range (range-intersect) and range-backsight (a total station-like method).
The MV60 micro-electromechanical system (MEMS) accelerometer delivers high performance and reliability in a small, rugged and low-cost package. The MV60 measures the acceleration experienced by an object during movement and is designed for use in inertial measurement units and navigation systems deployed on land, air and sea vehicles to measure velocity. It has a compact footprint of 1.2 square inches and shock survivability of up to 5,000 g. It also offers bandwidth of greater than 300 Hz — important for environmentally demanding missions.
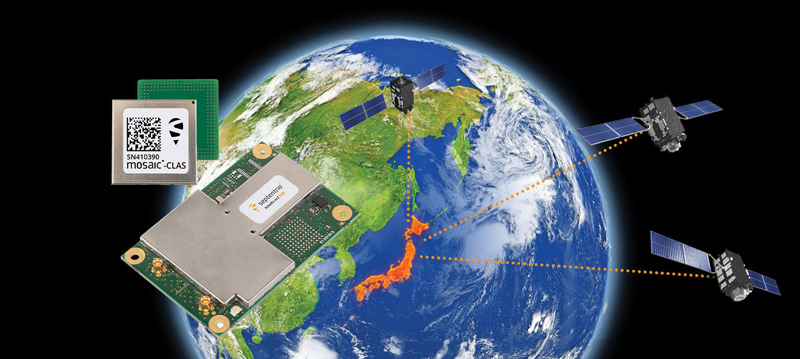
Receivers support Japan’s cm-level augmentation service
Photo: Septentrio
Three multi-frequency GNSS receivers now support the Centimeter-Level Augmentation Service (CLAS), receiving the L6 signal that transmits high-accuracy corrections from Japan’s QZSS constellation. The mosaic-CLAS receiver is in a small form-factor suitable for high-volume industrial applications. The AsteRx-m3 CLAS OEM board combines PPP-RTK CLAS with dual-antenna heading functionality. The AsteRx SB3 CLAS features a ruggedized IP68 enclosure to protect it in harsh environments.
The S1-V300 medium-altitude long-endurance (MALE) unmanned aerial system (UAS) prototype is based on the Saker MALE UAS design that achieved operational capability in 2020. The prototype features a new design and a more powerful heavy fuel engine with 260 HP, offering greater speed, payload and endurance of 28 hours with a range of 4,020 km. The aircraft features unique UAVOS avionics solutions and a redundant flight control system that will enable complex missions, including overland and maritime intelligence, surveillance and reconnaissance (ISR) missions. The improved S1-V300 prototype is equipped with both line-of-sight and beyond-visual-line-of-sight (BVLOS) datalink systems for over-the-horizon operations. It can be integrated with multiple ISR sensors, including electro-optical infrared cameras and a synthetic aperture radar that offers all-weather, day/night performance for a wide-area search capability.
Dragonfish Lite and Pro now available in United States
Photo: Autel Robotics
The rugged Dragonfish UAVs are capable of vertical takeoff and landing (VTOL) with both multi-rotor and winged flight, with an endurance of up to 180 minutes. They are suitable for professional applications such as energy, mining, defense and surveillance. Maximum winged flight speed is 30 m/s (108 km/h, 67 mph), and maximum video transmission range is 30 km (18.6 miles) with a base station. The aircraft can make a smart decision to either land or return to base in case of issues such as loss of GPS signal, loss of operator communications, or low battery power. The tilt-rotor system will automatically transition to multi-rotor mode if adverse conditions cause fixed-winged flight to stall or become unsustainable. The Dragonfish battery, barometer, positioning system, compass and inertial measurement unit all have backup modules to ensure flight safety.
The SureCam connected dash camera system now features a method for capturing video footage from SureCam cameras using Geotab’s telematics device and rule-based system. This results in a seamless display of video within the MyGeotab platform. The enhanced SureCam fleet video solution leverages Geotab’s numerous data-based rules, such as improper seat belt usage and speeding. It also uses G-force triggered alerts that detect unsafe driving behaviors and automatically captures video footage that can be reviewed later. A new Video Request feature in GeoTab enables fleet managers to preview and download additional SureCam video, enabling them to investigate call-ins and other minor incidents that may not have been triggered by an event-based rule.
Momentum IoT’s long-life Eagle 1 tracker works without external power for more than six months after a single charge. The device switches on-the-fly between narrowband internet of things (NB-IoT) and LTE Cat-M. The Eagle 1 leverages Telit’s dual-mode ME310G1 module, which delivers low power consumption in a small footprint. The Eagle 1 detects movement with a built-in accelerometer. Using movement and signals from its GPS receiver to determine vehicle trip starts and stops, the device can go into hibernation mode during periods when the vehicle is not in use, further reducing power consumption. Applications include garbage and storage bins, portable toilets, roll-off containers, message-boards, coolers, and other equipment typically stationed in non-powered, remote places for extended periods.
The largest source of error in GNSS positioning is the delay suffered by the signals as they pass through the ionosphere traveling from the satellites in orbit to receivers on or near Earth’s surface. That is because the ionosphere is full of free electrons stripped from atoms and molecules by ionization and this plasma refracts the signals, changing their speed. Normally, models compensate for this. However, geomagnetic storms wreak havoc on the free electrons in the ionosphere, making it difficult to accurately determine the signal delay.
That is why space weather matters for GNSS and for the myriad human activities that have come to depend on it.
So, here’s the good news. “On a scale of one to five, the geomagnetic storm on April 14 was a three,” Bill Murtagh told me. Murtagh is the Program Coordinator and Space Weather Forecaster at the Space Weather Prediction Center (SWPC) of the National Oceanic and Atmospheric Administration (NOAA). He was referring to the third rung of NOAA’s space weather scales, which were introduced to communicate to the public the current and future space weather conditions and their possible effects on people and systems.
NOAA has three space weather scales, one each for geomagnetic storms (G scale), solar radiation storms (S scale), and radio blackouts (R scale). The steps on the scales, ranging from “minor” to “extreme,” are analogous to those NOAA uses to classify hurricanes, tornadoes and earthquakes. They describe the environmental disturbances for each of these events and list their possible effects at each level.
Solar activity runs in 11-year cycles. A G5 event happens two or three times per cycle, and the last one was in October 2003, Murtagh told me. “I can only remember a handful of occasions over the past 20 years when ionospheric activity has significantly impacted users,” told me Gavin Schrock, PLS, manager of the Washington State Reference Network, a regional cooperative of GPS reference stations and data. According to Rick Hamilton, the GPS Information Analysis Team Lead at the U.S. Coast Guard Navigation Center, it “did not receive any reports of interference related to the geostorm” and “there was no significant increase in reports that we might attribute to geomagnetic activity.”
Now, the bad news. We are heading for a maximum in solar activity, expected to occur in 2025. The Sun is “already quite active,” Murtagh pointed out, and recently there has been an increase in the number of R1 and R2 storms. Solar coronal mass ejections (CMEs), which launch plasma and magnetic fields into space, also have become more frequent. When a CME hits the Earth, its collision with the Earth’s magnetic field causes a geomagnetic storm.
So, the GNSS constellations and the GNSS industry should be preparing now. Fortunately, improvements in GNSS software and receiver technology, plus corrections and integrity information and the much larger number of satellites, make us better prepared than we were during the last cycle. On the other hand, the stakes also are much larger, due to our ever-greater reliance on GNSS.
As a sailor, I rely on NOAA nautical charts and marine weather forecasts. GNSS users can thank NOAA for its space weather forecasts.
Hexagon | NovAtel’s GAJT-710ML installed on a U.S. Army vehicle. Photo: U.S. Army Futures Command
We asked Dean Kemp, Ph.D., director of Marketing, Aerospace and Defense for Hexagon’s Autonomy & Positioning division, a few questions.
How do jamming and spoofing threats change?
Jamming and spoofing methods change as new interference-causing technologies become available. As such, it’s vital for us to continuously evaluate potential sources of threats and provide the highest possible level of resiliency to interference in our solutions.
Have new threats emerged in the past six weeks in connection with Russia’s invasion of Ukraine?
Evidence is emerging that electronic-warfare systems capable of high-power jamming and spoofing across wide areas are being used within Ukraine. Fortunately, there have been no known impacts on allied forces. However, knowing that the technology is in place and in use highlights the importance of assured positioning, navigation and timing (APNT) and our contribution to building resiliency in allied forces’ equipment against the potentially destabilizing effects of jamming and spoofing.
How do you define APNT?
We use APNT to describe measurements that are always accurate, available and reliable. Our anti-jamming, anti-spoofing and other resilience-building capabilities provide trusted and available PNT information at the level of accuracy requested.
When did you introduce GPS Anti-Jam Technology (GAJT)? How do you define it?
GAJT was introduced in 2011 and is our leading APNT solution. GAJT units are utilized worldwide across land, sea and air, with rapid deployment supported by commercial off-the-shelf solutions and short lead times. GAJT provides jamming protection of satellite-based navigation and precise timing receivers from intentional jamming and unintentional interference whatever your application. Product variants provide features to best support anti-jamming capabilities for the warfighter, national infrastructure, low-SWaP platforms and other mission-critical applications.
What are the key differences between the GAJT-710ML, the GAJT-710MS and the GAJT-410MS?
The GAJT-710 is designed for land vehicles (ML variant) and marine vessel platforms (MS variant) with up to six simultaneous nulls to protect against jamming signals and interference. The next generation of GAJT-710 includes jammer direction-finding and a silent mode to reduce its thermal signature. The GAJT-410 maintains the high levels of interference-rejection performance in the 710 but in a lower size, weight and power (SWaP) design, with three simultaneous nulls, for both land and marine variants. It also utilizes a single RF cable to provide clean power, data and protected GPS signal. The GAJT-410 enables APNT while also reducing the need for platform modifications or armor penetration.
The GAJT-AE extends jamming and interference protection to unmanned and autonomous applications. Using an external CRPA antenna, the GAJT-AE offers flexibility of integration into space-constrained platforms.
Is the GAJT-AE-N Anti-Jam Antenna receiver-agnostic?
We designed our GAJT product line to be receiver-agnostic and compatible with legacy and modern GNSS receivers. This flexibility results in GAJT being ideal for civil and military applications, including SAASM and M-code systems.
How does your GNSS Resilience and Integrity Technology (GRIT, launched in 2020 November) relate to your GAJT antennas?
GRIT is a firmware suite for our OEM7 receivers that expands their situational awareness and interference mitigation tools. GRIT includes our Interference Toolkit (ITK) along with spoofing detection to identify when your GNSS signal may be under threat. It also empowers the user to develop interference location algorithms through time-tagged snapshots of data samples to characterize the RF environment around your operations. GRIT, alongside GAJT, forms the foundation of our APNT strategy in providing accurate and always-available PNT.
Do you have any recent contracts with the U.S. Department of Defense or the militaries of other NATO countries to supply GAJT antennas?
Our GAJT product portfolio has been sold in large quantities to military and civil organizations for many years, successfully proving itself in the field. In 2020, we achieved a milestone of more than several thousand units shipped worldwide, making it one of Hexagon | NovAtel’s more successful years.
Chip-scale atomic clocks can supplement GNSS receivers to provide accurate and reliable time in GNSS-challenged environments. Photo: Microchip Technology
Accurate and reliable time is just as important as accurate and reliable location for a wide range of military and civilian applications — and GNSS receivers cannot provide either one when they are jammed. For timing, one solution is to supplement GNSS receivers with a miniature atomic clock. We asked Microchip Technology a few questions about their chip-scale atomic clock (CSAC) and Stewart Hampton, the company’s senior product line manager, responded.
How long was your SA65 CSAC in development before you announced it in August 2021? Typically, how often do you launch a new CSAC?
CSAC development started in 2001 under a contract from DARPA with Draper and Sandia laboratories. CSAC was first introduced to the commercial marketplace in 2011, and in 2016 we released an improved product design with an operating temperature range of –10 C° to +70 C°. Last year we released our CSAC SA65 with a wider operating temperature range, faster warm-up and improved frequency stability aimed at the defense and industrial marketplace. So, it has been about five years between major CSAC releases, but that may not be indicative of future products because we have also introduced specialized CSAC versions, such as the Low Noise CSAC (LNCSAC) in 2014 and the only commercially available radiation-tolerant CSAC (Space CSAC) in 2018.
What is the CSAC SA65’s drift rate?
Its typical drift rate is specified at <9 × 10–10 per month. Another key specification, particularly for many portable military applications, is total sensitivity of frequency to temperature (tempco) over a specified range. For the CSAC SA65, that specification is ±3 × 10–10 over the entire operating temperature range of –40 C° to +80 C °.
What are a few specific military use cases?
CSAC is designed into multiple military programs and used in a wide variety of military applications, particularly in GNSS-denied environments — including assured positioning, navigation and timing (APNT) modules, underwater unmanned and autonomous vehicles, software-defined radios, man-portable transceiver-based military communications, vehicle management computers, airborne reconnaissance/UAVs and GNSS-disciplined oscillators. It is also used in command, control, communications, computers, cyber, intelligence, surveillance and reconnaissance (C5ISR). The space CSAC variant is commonly used on low-Earth-orbit space defense payloads supporting such applications as low-latency communications networks, RF geolocation (geointelligence, or GEOINT), optical time transfer, alternative PNT satellites and Earth observation.
Spirent Federal Systems, a PNT simulation company, offers its government customers and contractors a unique solution for anechoic-chamber-based CRPA testing: a patented “zoned chamber” approach using multi-output, multi-constellation GNSS signal simulators to emulate the movement of satellites in orbit.
To address the limits of a standard anechoic chamber, Spirent has created independent zones configured to represent the real-world sky view, using genuine constellations and improved satellite azimuth and elevation arrival angles. Test scenarios can be multi-constellation and multi-frequency with customizable time, date and duration — now lasting hours instead of minutes.
Because scenarios are valid for longer time periods without sacrificing realism, the zoned chamber is effective for validating all aspects of the CRPA system including beamforming, null steering and space-frequency adaptive processing/space-time adaptive processing (SFAP/STAP). CRPA systems with inertial sensors can be tested with static and dynamic scenarios using a positioner within the chamber.
Additionally, to account for multipath and signal obscuration, Spirent has integrated a 3D environment modeling tool which generates all the variables of a multipath-rich environment in real time, including ground reflection. Interference sources such as jammers and spoofers can be added anywhere in the chamber and concurrently simulated with the GNSS signals. Authorized users can also test classified RF signals such as MNSA M-code and Y-code.
“Spirent Federal’s goal is to get new technologies to U.S. warfighters at a speed that outpaces near-peer threats,” said Jeff Martin, vice president of Sales. “The realism of our patented zoned chamber allows advanced CRPA systems to be deployed faster with confidence they will perform in GPS-contested environments.”
Illustration of a simulated test environment incorporating GNSS, multipath and jamming in a Spirent zoned chamber. (Image: Spirent Federal)
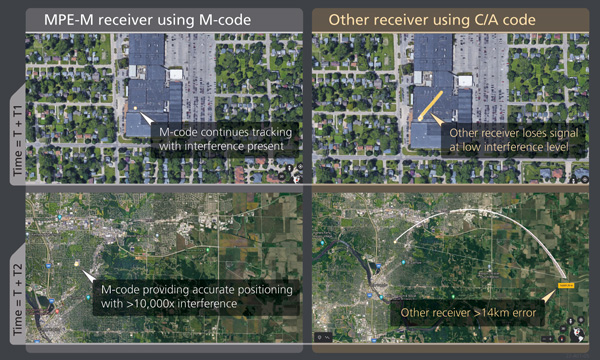
BAE Systems has produced more than one and a half million military GPS receivers. The company is transitioning receiver designs to use the modernized military code (M-code) signal for added resiliency in RF-challenged environments. We asked Luke Bishop, director and product line engineering lead for the company’s Navigation & Sensor Systems, a few questions.
BAE Systems’ MPE-M provides the benefit of M-Code operation in a challenged RF environment. Image: BAE Systems
Why transition to M-code?
There are three key reasons for users to transition to M-code as supported by Military GPS User Equipment (MGUE). First, MGUE provide U.S. forces and our allies with enhanced PNT capabilities while improving resistance to threats, such as accidental and intentional jamming. Compared to the current P(Y)-code signal specs, M-code signals are stronger. Second, MGUE provides improved resistance to spoofing. Third, MGUE is field programmable, enabling updates to accommodate future enhancements to the GPS enterprise, such as regional military protection (RMP).
Which user equipment is transitioning to M-code?
Successful MGUE Inc 1 prototype development is being leveraged into a full portfolio of weapons, ground and aviation/maritime M-code GPS receivers. Our first production M-code receiver, MPE-M, achieved production deliveries in CY2021, with more than 1,000 delivered. Additional M-code GPS form factors are under development.
We are also underway with the Foreign Military Sales (FMS) M-code program with MPE-M.
How is the transition to M-code proceeding?
As indicated by the January 2021 GAO report (GAO-21-145), M-code-capable user equipment is in the initial stages of Department of Defense (DOD) fielding for select weapon systems. Also noted by the GAO report, the DOD has conducted bulk purchases of the Increment 1 ASICs [application-specific integrated circuits] to ensure that “sufficient supplies of [them] are on hand for future integration into M-code card …based on estimated need through 2028.” We are at the beginning of M-code (MGUE). Time and the market will tell what ultimately happens.
Which of your receivers operate with an anti-jam (AJ) antenna?
BAE Systems’ receivers support both stand-alone AJ and integrated AJ. Receivers with integrated AJ include the NavFire-M, NavStorm-M and SABR-M receivers supporting high-dynamic weapons applications. Receivers directly supporting external AJ via a digital beamforming interface include the MPE-M and AMR. Our external AJ DIGAR offering provides exceptional performance for many stakeholders.
Do you use advanced signal simulation equipment?
We integrate Spirent Federal and other signal simulators in both our test and development environments, where modeled RF signals are coordinated with other sensor measurements and host vehicle messages for high-fidelity hardware-in-the-loop test cases. Our engineers create hundreds of test cases and scripted test procedures to exercise our products under all required conditions. These simulations allow us to run thousands of trials to qualify and validate performance of our products in extreme scenarios.
BAE Systems’ hardware-in-the-loop simulation environments build upon Spirent Federal signal generators to test products under extreme dynamic and threat environments. (Photo: Spirent Federal)
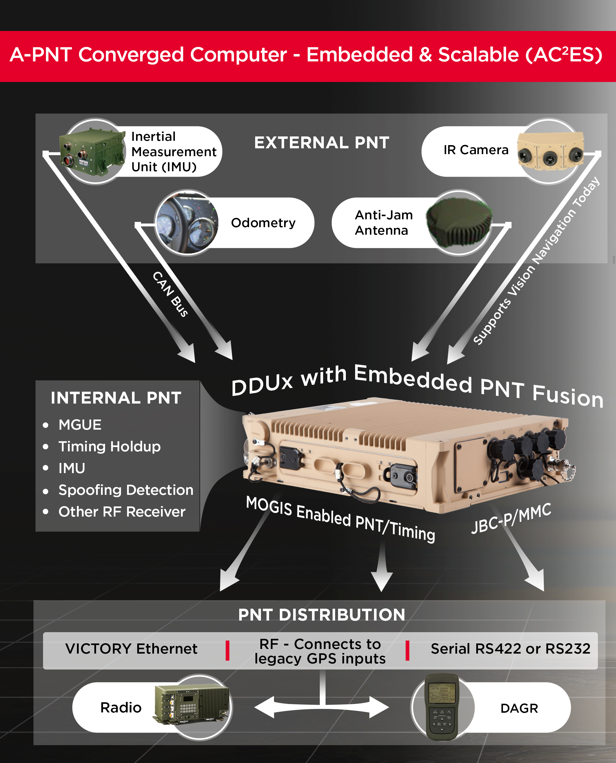
Leonardo DRS’ A-PNT Converged Computer – Embedded & Scalable (AC²ES) adds capabilities to its widely used DDUx. Photo: Leonardo DRS
To help counter attacks that degrade GNSS capability on combat vehicles, Leonardo DRS developed a modified data-distribution unit computer, the DDUx II, with an embedded assured positioning, navigation and timing (APNT) capability the company calls Assured Positioning, Navigation and Timing Converged Computer Embedded & Scalable (AC²ES). It augments standard military GPS PNT sources with technologies such as anti-jam, anti-spoof, M-code receivers, additional RF sources, vehicle infrared (IR) sensor vision navigation, wheel rotation and inertial measurement units (IMUs). It also offers a choice of multiple timing holdup modules that increase accuracy proportionately with cost.
The DDUx II and military variants, fielded by the U.S. Army and Marine Corps, allow for integration of APNT functionality with the Battle Management System (BMS). It can provide APNT distribution to all other devices needing PNT within the vehicle without adding to its size, weight and power (SWAP).
Following a five-year development program, Leonardo DRS launched the AC²ES in September 2021 as a commercial option while continuing discussions with the U.S. Army and Marine Corps, which have not yet adopted it. “We have tested it,” said Mike Stucki, business development manager for the company’s land electronics division. “We have gone to Army jamming and testing events. We have performance and results. However, it has not been officially tested under the Army or Marines programs, with which we are moving forward this year.”
Leonardo DRS wants to offer the armed services the additional components they need to achieve APNT “and not require them to buy anything they don’t need or want,” Stucki said. Those additional components include multiple GNSS receivers for timing and a low-end internal IMU to provide continuous navigation in case GNSS is disrupted. All these components fit directly into the existing DRS hardware. Under the Mounted Family of Computer Systems (MFoCS) program alone, the Army has fielded more than 100,000 DDUx units. Some vehicles already have high-end INS, wheel encoders, and other sensors, and MFoCS can ingest their data.
Navigating with Infrared
For vision navigation, Leonardo DRS uses software developed by its partner Leidos that ingests data from existing hardware on the vehicles, many of which already have IR cameras. In a GNSS-denied environment, this enables the system to navigate by matching what the IR camera sees to an imagery database. Leidos’ software is based on work it began in 2011 with the DARPA All-Source Positioning and Navigation (ASPN) program.
“Leidos developed algorithms that use these other sensor inputs in the sensor-fusion engine to provide more accurate absolute positioning in a completely RF-denied environment,” said Kevin Betts, PNT director for Leidos. “We take the live images from the vehicle’s existing IR camera and match them to a satellite-derived model of the environment. When the images match, we have an absolute position update that we can provide to the navigation filter.”
MFoCS “is the heart that runs the Blue Force tracker system that the soldiers use,” said Bart Blanchard, director of advanced programs at Leonardo DRS. “We’ve added the APNT components inside that box. They’re leveraging the hardware that they already own. It’s a very cost-effective solution.”
Better Performance Combining Fiber Optics and Wideband Radio
Innovation Insights with Richard Langley
“OH DEAR! OH DEAR! I SHALL BE LATE!” That’s what the White Rabbit said in the opening chapter of Lewis Carroll’s Alice’s Adventures in Wonderland just before checking the time on its pocket watch. Scientists at the European Organization for Nuclear Research (known by its French acronym CERN) named their project to develop an Ethernet-based network for general purpose data transfer and sub-nanosecond accuracy time transfer after the time-conscious rabbit. CERN’s White Rabbit (WR) can provide sub-nanosecond accuracy to synchronize more than 1,000 nodes via optical fiber or copper connections of up to 100s of kilometers in length. It is a flexible system with a scalable and modular infrastructure with a simple configuration and low maintenance requirements. It is also open source.
WR uses the IEEE 1588 Precision Time Protocol (PTP) to establish precise phase differences between a master reference clock and a local clock. A two-way exchange of PTP synchronization messages allows precise adjustment of clock phase and offset.
So, what has this got to do with GPS or more generally GNSS? Well, for one thing, a WR-based system can serve as a back-up for GNSS time transfer or even replace GNSS. For example, a multi-hop WR link has been installed to connect financial trading locations in Chicago and New Jersey over an approximately 1,350-kilometer distance. Stock markets and other financial institutions need to time-tag transactions with traceable synchronization to a high-accuracy time standard to the microsecond level or better and a WR link can easily provide that.
Another application of WR is in terrestrial positioning. As we know, one of the problems with GNSS positioning is its poorer performance in built-up areas compared to open ones due to blocked signals and multipath. Multipath signals from close-by reflectors can be particularly pernicious as they reduce pseudorange measurement accuracy and thereby increase position error. And another potential weakness of GNSS is its susceptibility to radio-frequency interference, jamming and spoofing. A positioning system using synchronized roadside radio transmitters could be a viable alternative to GNSS in urban areas. A team of researchers based in The Netherlands has developed just such a system. In this month’s column, they describe their system, which uses WR to synchronize the transmissions of wideband radio ranging signals, and how they are able to achieve decimeter-level position accuracy in multipath environments.
By Cherif Diouf, Han Dun, Gerard Janssen, Erik Dierikx, Jeroen Koelemeij and Christian Tiberius
GPS is undoubtedly the most popular system providing positioning, navigation and timing (PNT) services to a host of applications, industries and infrastructures. GPS is mass-adopted, has worldwide coverage, has an impressive up-time and can be used with a wide range of receiver devices, featuring low to high cost and low to high precision.
Despite its strengths, the system also has some weaknesses. For instance, the positioning performance provided by GPS in dense multipath environments, such as in urban canyons, is poor. This is due to the interaction between the desired line-of-sight (LOS) component and close-in multipath components of the GPS signal reflected or scattered by built-up surroundings. Moreover, GPS signals, due to their low received power levels, are fairly vulnerable to unintentional and intentional threats such as radio-frequency interference, jamming and spoofing.
Alternative solutions that may complement or back up GPS, and more generally any other GNSS, to achieve reliable PNT for critical services and infrastructure, such as first responders, telecommunication and power systems, are urgently sought after. Wide coverage area synchronization using White Rabbit optical fiber networks allows simultaneous Ethernet networking and dissemination of 100 picosecond-level accurate time and frequency signals over distances of hundreds of kilometers. Accurate time synchronization may be provided to large areas such as big cities through this technology.
Building on such an accurate system, we present a concept and demonstration of an innovative hybrid optical-wireless terrestrial networked positioning system (TNPS). The TNPS demonstrator uses a White Rabbit infrastructure to accurately synchronize the transmissions of wideband radio positioning signals by its ground-based transmitters (pseudolites) and achieves decimeter-level positioning accuracy in an urban road-like configuration.
SCALABLE FIBER NETWORK DISTRIBUTION
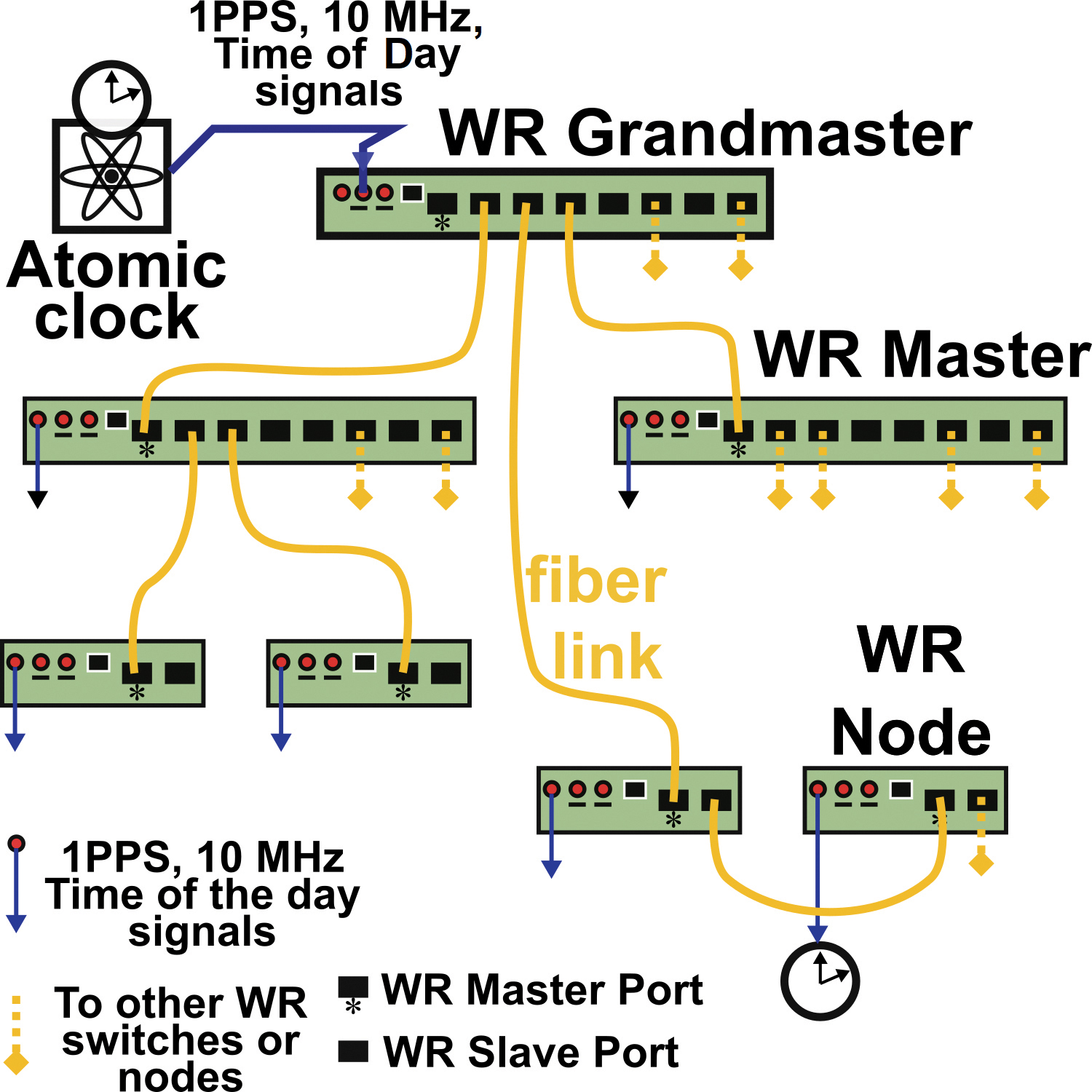
Initially developed for the Large Hadron Collider at the European Organization for Nuclear Research (CERN), White Rabbit (WR) is an accurate and scalable fiber-optic time and frequency transfer method that allows for dissemination of time references at sub-nanosecond level over distances of hundreds of kilometers. A typical WR network layout is shown in FIGURE 1.
FIGURE 1. Simplified topology of a White Rabbit (WR) network for optical time and frequency distribution. The yellow lines represent fiber-optic connections and the blue lines are electrical connections.
A central atomic clock provides synchronization references to a principal WR master switch dubbed the “grandmaster.” The grandmaster feeds synchronization signals into the network. which is expanded via fiber-connected WR devices: the switches and nodes of the network. These devices are serially linked to each other following a hierarchical master-slave pair configuration.
Accurate synchronization between a master and a slave WR-pair is performed as follows. The pair, which is connected via a bidirectional 1.25 gigabits per second optical Ethernet data link, quasi-continuously measures the round-trip delay of the data signals exchanged between the two devices. From these round-trip measurements, the one-way propagation delay, assumed symmetrical, is derived and compensated by the WR devices through an electronic control loop. To take into account possible asymmetries within a link, a calibration procedure is needed when initially installing the connection between a master and a slave. In practice, within smaller scale networks, the synchronization offset accuracy between devices is at the 100 picosecond-level. A 400-picosecond offset between WR devices has even been demonstrated over a distance of 169 kilometers, and more recently over a distance of 800 kilometers.
Besides the fiber-optic connection with other elements of the WR network, each switch or node can share its time-frequency references to an external device or system. These time-frequency references are available either in the form of IEEE 1588 Precision Time Protocol time stamps (via Ethernet connection), or in the form of electrical 1 pulse per second / 10 MHz synchronization signals (via coaxial cables).
THE CONCEPT
Centimeter- or even decimeter-level positioning accuracy is challenging to achieve using GNSS. In dense multipath environments, such as in urban canyons or indoor locations, the accuracy provided by GNSS is poor compared to the meter-level accuracy achievable in open terrain with the Standard Positioning Service. Moreover, GNSS services are vulnerable to interference, spoofing and jamming, and may be denied in indoor areas. We propose a TNPS based on a WR synchronization infrastructure as a complement to GNSS, providing higher timing and positioning accuracy, which also works in challenging environments.
TNPS can achieve decimeter-level accuracy in challenging environments through the use of wideband radio positioning signals. The attainable ranging precision is inversely proportional to the signal bandwidth. Furthermore, in dense multipath environments such as urban canyons, using wider bandwidth signals allows for finer time resolution. As a consequence, close-in received multipath components (MPCs) can be better resolved, and the LOS component can be more easily discriminated from delayed MPCs. This results in more accurate position solutions.
TNPS DEMONSTRATOR
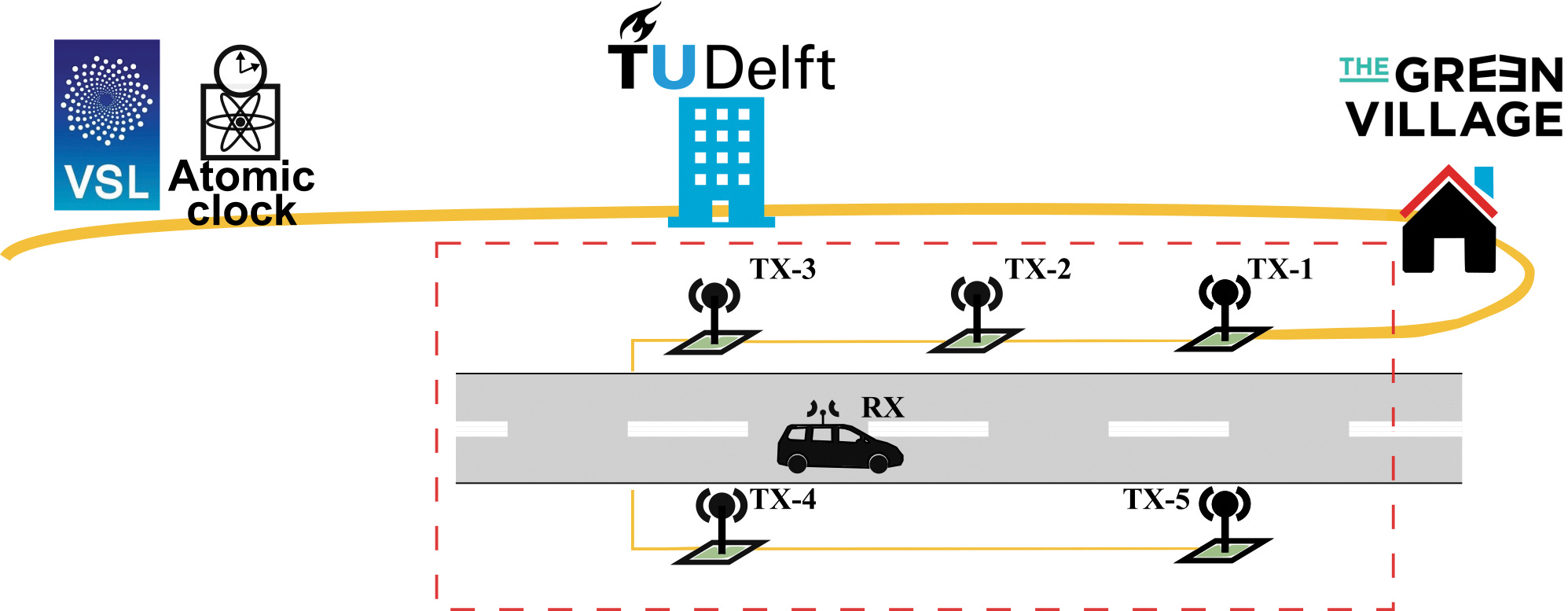
We performed a demonstration of the concept in Delft, The Netherlands, at The Green Village (TGV), an experimental facility on the campus of the Delft University of Technology. The facility aims to accelerate development and implementation of innovations for a sustainable future (see FIGURE 2).
FIGURE 2. Implementation of the TNPS demonstrator. The time-frequency reference is provided by VSL and forwarded to TU Delft via optical fiber (in yellow) and distributed through the optical WR synchronization infrastructure. Wireless radio transmitters (green squares) connected to the WR network deliver wideband ranging signals to perform terrestrial positioning and navigation.
The central synchronization reference of the TNPS demonstrator is the Dutch national timescale version of Coordinated Universal Time UTC(VSL), derived from atomic clocks at the Van Swinden Laboratory (VSL), the Dutch metrology institute. The UTC(VSL) 10 MHz frequency reference and 1 pulse per second time reference are fed to the WR grandmaster switch (WR-SW1). The grandmaster switch is subsequently connected to a distant WR switch (WR-SW2) through a 1,470-nanometer downstream and a 1,490-nanometer upstream 1.25 gigabit per second optical link. WR-SW2, located at one of the TU Delft data centers, synchronizes in turn a WR node (WR-N1) installed at TGV.
The remaining TNPS nodes at TGV are synchronized through a daisy-chain configuration. The first node (WR-N1) is connected to a second one (WR-N2), which is then connected to a third (WR-N3) and so on. In total, five timing nodes, WR-N1 to WR-N5, are connected to one another, using 50-meter optical fibers. These 5 timing nodes are used for synchronization (see FIGURE 3), and provide 1 pulse per second and 10 MHz electrical signals to five wideband radio transmitting units, uTX-1 to uTX-5, installed along a 50-meter stretch of road at TGV.
FIGURE 3. WR timing node (top) fed by a 1.25 gigabit per second bitstream through an optical fiber (yellow cable to the right) and providing electrical 1 pulse per second and 10 MHz synchronization signals at the outputs (two cables to the left). The bottom image shows an SDR system. The two channels of this device, capable of wideband operation, act here as a wireless transmitter or as a receiver. The transmitters are synchronized to the WR network through the 1 pulse per second and the 10 MHz electrical signals (blue-yellow cables at bottom) provided by the WR timing node.
A transmitting unit is based on a wideband transceiver: a software-defined radio (SDR) system linked to a wideband antenna that can operate from 700 MHz to 6 GHz. The antennas are connected to the SDRs using coaxial cables with a length of 5 meters and mounted on lampposts along the road at a height of about 4 meters. The transmitting units, uTX-1 to uTX-5, are respectively associated with antennas TX-1 to TX-5.
Each of these SDRs is capable of transmitting a wireless signal of up to 160 MHz bandwidth, on one or two of the device transmitter channels. The central frequency of each channel is tunable from 10 MHz to 6 GHz. In the demonstrator, we used a 3.96 GHz carrier frequency. The transmitting units periodically stream 160 MHz wideband quadrature phase-shift keying (QPSK) modulated pseudorandom noise (PRN) ranging signals sampled at 200 MHz. The five transmitters operate according to a time-division-multiplexing (TDM) scheme; uTX-1 to uTX-5 successively transmit the QPSK-modulated sequences as a 27.5-microsecond “burst” before turning idle. Between two successive transmissions, a guard interval of 3 microseconds is inserted during which all transmitting units are in idle state. It takes in total 150 microseconds for the five units to complete a transmission round, after which the units remain idle. The transmission round is then retriggered each millisecond.
At the receiver side (RX), another SDR platform is configured to acquire the QPSK modulated bursts transmitted by the five units uTX-1 to uTX-5. This SDR is actually playing the role of a data acquisition platform, which records and forwards the incoming sampled ranging sequences to the host PC via an Ethernet link. All processing and analysis in the demonstrator is performed offline, rather than in real time, using the collected ranging signals. The sampling rate of the acquisition platform is 200 MHz. A sample consists of a 16-bit in-phase value and a 16-bit quadrature-phase value (4 bytes in memory). In continuous operation, the SDR acquisition throughput would amount to 800 megabytes per second.
A throughput of 800 megabytes per second is difficult to handle for most of the host PCs. The SDR is therefore configured to only forward the relevant part of the data collected. Only the received samples time-aligned with the 150-microsecond transmitting window are periodically transferred to the host PC at a rate of 1 kHz. In practice, the acquisition window is slightly extended to 160 microseconds. Overall, the data throughput between the SDR and the host PC is now reduced to 128 megabytes per second; that is, 10 seconds of acquisition will generate a data file of 1.28 gigabytes.
A Schmidl & Cox synchronization sequence is embedded in the signal transmitted by uTX-1. The SDR field-programmable gate array continuously performs autocorrelation on the incoming samples and uses this sequence to detect the arrival time of the ranging bursts for operation in asynchronous mode. The receiver also can be operated in synchronous mode, that is, synchronized to a timing node.
TEST SETUP
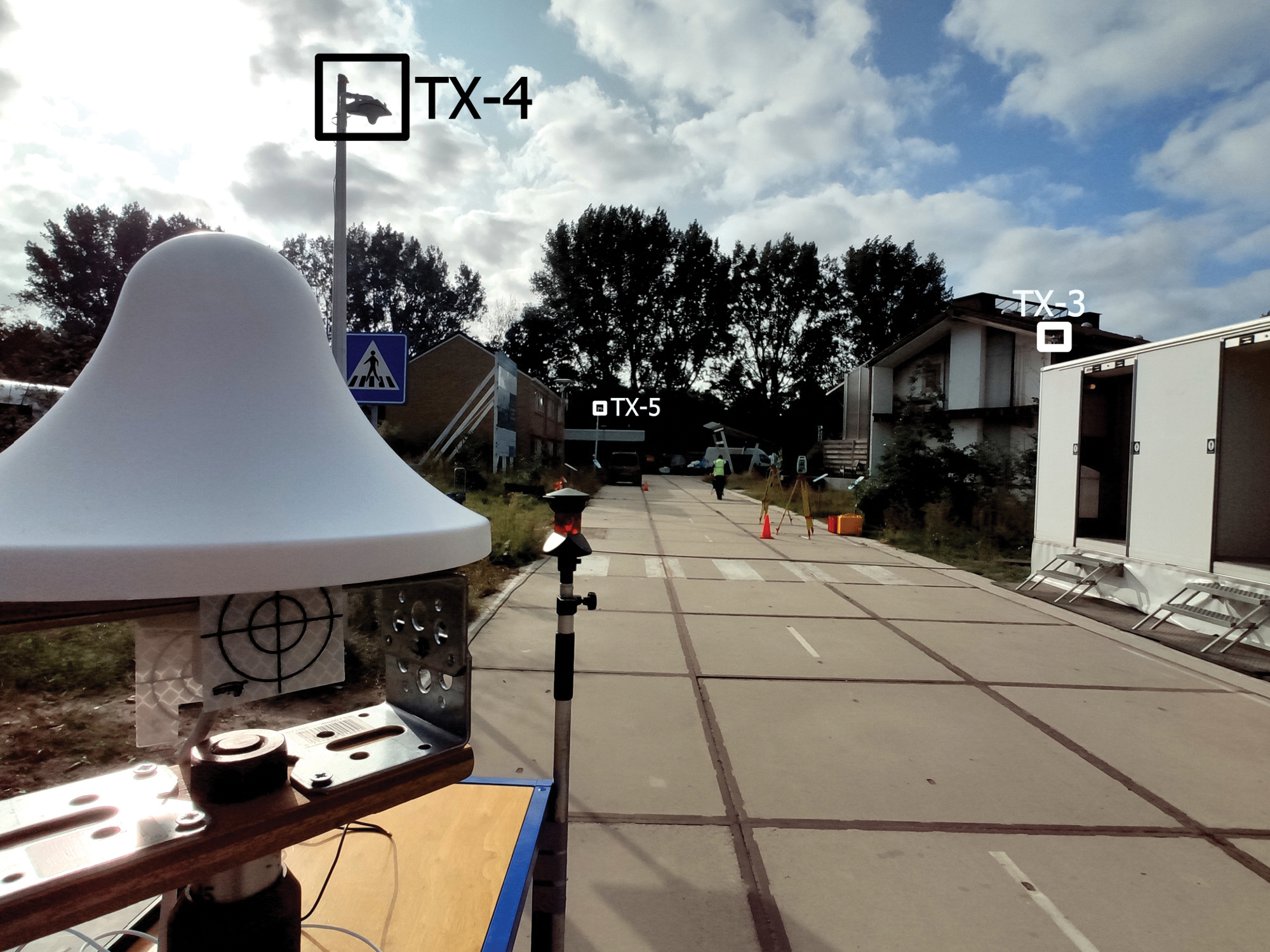
We carried out experiments on a 50-meter-long and 6-meter-wide local road at The Green Village (see FIGURE 4).
FIGURE 4. Test road at The Green Village, with three of the five roadside transmitting antennas (TX-3 to TX-5) as indicated. In the foreground, the receiver antenna is mounted on a trolley.
The road is bordered by built-up objects such as brick-wall houses, metal containers and large wooden advertising panels. These generate MPCs, which degrade the radio-positioning performance. The antennas TX-3, TX-4 and TX-5 can be seen mounted on lampposts. In Figure 4, the antennas TX-1 and TX-2 are on the right-hand sidewalk but not visible. The receiving antenna is in front to the left, mounted on a trolley. The RX antenna is identical to the ones used by the transmitters.
The receiver is used to perform a static survey at 50 locations on the road (staying at each point for around 1 minute). As shown in FIGURE 5, the receiver was also used for a kinematic experiment. The RX antenna is mounted on the roof of a car using a wooden beam. The RX antenna is linked via a 3-meter coaxial cable to the receiving SDR placed inside the car and connected to a host PC.
FIGURE 5. Receiver antenna mounted on the roof of a car. Two 360° prisms are used to determine the receiver ground-truth positions at the millimeter level, by means of land surveying total stations (placed on the yellow tripods in the distance).
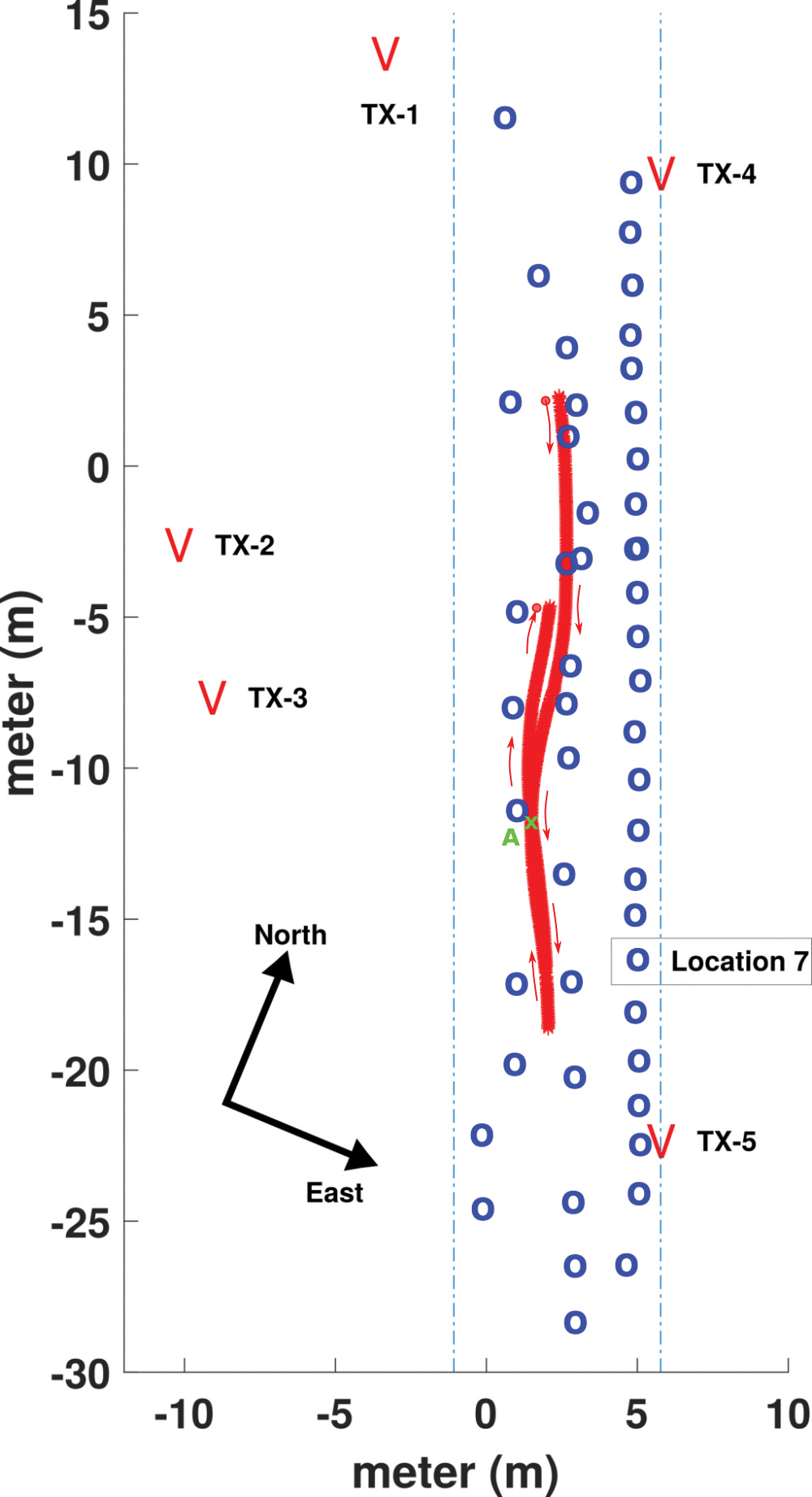
FIGURE 6 presents a map of the road with the static locations (in blue) and the forth-and-back kinematic track (in red). The transmitting antenna positions are indicated at both sides of the road.
FIGURE 6. Setup of the experiment on the local road at TGV. The locations of the transmit antennas, TX-1 to TX-5, are shown. Locations of static surveyed points are in blue, and the track of the kinematic experiment in red, with the RX antenna mounted on the roof of a car.
To establish a local coordinate system, the ground-truth positions of the RX antenna are determined using two land surveying total stations that rely on retro-reflective targets and 360° prisms to measure distances and angles. In Figure 4, a retro-reflective target, placed directly under the RX antenna, is visible, while the two total stations can be seen halfway down the road on the righthand side. In Figure 5, 360° prisms can be seen on both ends of the wooden beam on the roof of the car. The received signals are used to compute position solutions in post-processing, which are compared to the ground-truth values to assess the positioning accuracy. The accuracy of the ground-truth measurements is at the millimeter-level.
EXPERIMENTAL RESULTS
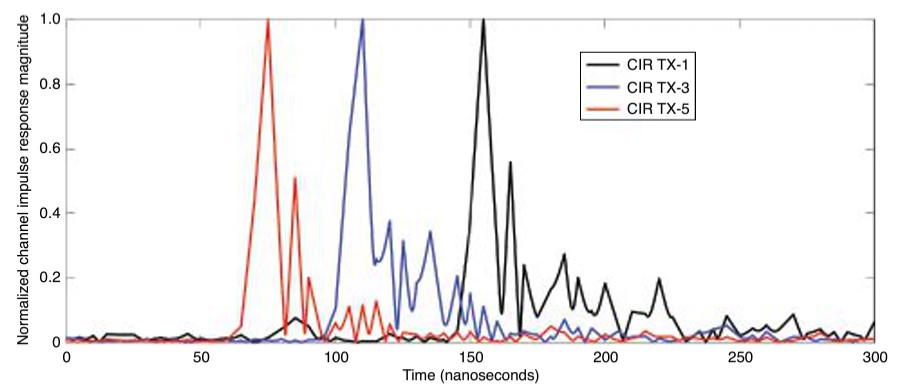
Achieving high positioning accuracy in a built-up area is difficult due to the presence of close-in MPCs, which arrive with very short time delays following the LOS component. FIGURE 7 shows the observed channel impulse responses (CIRs) between TX-1, TX-3, TX-5 and the receiver antenna RX placed at location 7 (see Figure 6). The LOS components can be easily detected as they correspond to the first and highest peak of each curve. However, we can also observe substantial close-in multipath components, which trail the main peaks. CIRs are obtained by division, in the frequency domain of the fast Fourier transform (FFT) of the received ranging sequences using the FFT of the known transmitted sequence. Oversampling by a factor of 100 is applied, as well as removing time delays of the TDM-scheme, such that the observed time delay difference directly represents the differences in ranges.
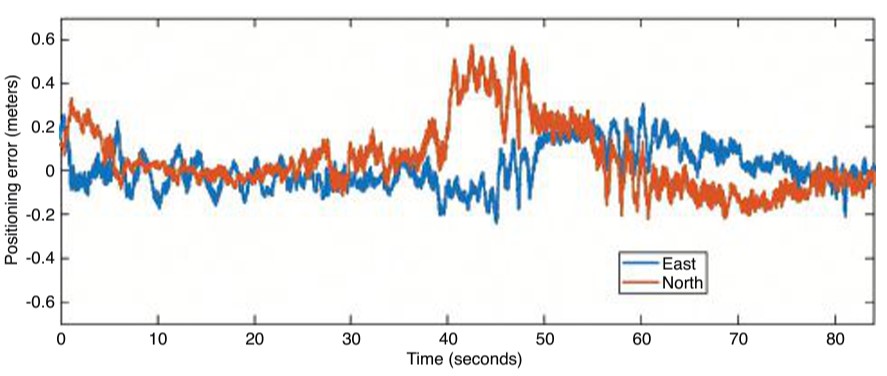
FIGURE 7. Normalized magnitude of the CIRs observed between the transmit antennas TX-1, TX-3 and TX-5 and the receiver antenna RX, positioned at reference point 7.FIGURE 8. Time series of the positioning error in the east and north directions during the kinematic experiment.
Since the TNPS signal bandwidth is 160 MHz, the time resolution is about 6.25 nanoseconds, which corresponds to about 1.9 meters of propagation distance. A multipath component, which arrives at the RX antenna with a lag larger than 6.25 nanoseconds with respect to the LOS component, is likely to be resolved and will not affect (bias) the ranging result. In this case, using time-of-flight techniques, ranges between TX and RX antennas can be determined, often at decimeter level, by extracting the time-of-arrival of the LOS components. Comparatively, if a 20 megasamples per second rate is used (corresponding to a 20 MHz bandwidth, commonly used in GNSS), the time resolution is 50 nanoseconds. An LOS component and a multipath component arriving at the RX antenna can likely be discriminated if the receiver and the reflector are separated by at least 15 meters. If the arrival time between the two components is less than 50 nanoseconds, then the MPC cannot be resolved and will cause a bias when determining the propagation distance between the TX and RX antenna.
The first and largest peak of each CIR seen in FIGURE 7 represents the LOS component. MPCs can be seen trailing the LOS, typically within the next 50 nanoseconds. The MPCs cause a bias in the estimated range when they cannot be resolved. Using wideband ranging signals allows for better time resolution, and better discrimination between the LOS component and the MPCs.
In the following, we assess the 2D positioning accuracy obtained using the demonstrator. 3D positioning is also possible with the demonstrator; however, since the TX antennas all are installed at similar heights and at a fairly low elevation compared to the RX antenna, we restrict our analysis to 2D positioning for the reason of having a poor geometry for determining the vertical position component. The 2D positioning model uses time difference of arrival (TDOA) pseudoranges allowing the cancellation of the asynchronous receiver clock offset. The frequency offset between the transmitters and the receiver has been estimated to be about 1 kHz, in asynchronous mode. After the TDOA ranges are computed from the experimental data, the 2D positioning problem is solved through Gauss-Newton iteration. Statistics of the static and kinematic 2D experiments are presented in TABLE 1.
TABLE 1. Static and kinematic positioning performance in terms of mean, standard deviation (std) and RMSE of position error, in east and north directions.
In the table, we present the mean position errors, standard deviations and root-mean-square errors (RMSEs) over the 50 surveyed points for the east and north directions. Mean errors of 6.4 and 4.3 centimeters are obtained for east and north directions, respectively. There is no significant bias in the system. In terms of RMSE, we can see that the positioning accuracy is just above 10 centimeters (11.6 and 15 centimeters respectively for the east and north directions). Overall, even with the presence of MPCs, and thanks to the synchronization accuracy and the wideband radio signals, a decimeter-level accuracy is achieved in static positioning.
The duration of the kinematic experiment was 84 seconds. Looking at the statistics of the kinematic experiment, the results for the east and north directions show a small bias and RMSE values of 9.2 and 16.4 centimeters respectively. The positioning performance in static and kinematic mode is close, both for the east and north components. In both cases, positioning performance is better in the east direction than in the north direction. This may be explained by better spatial diversity of the antennas towards the east direction. The time series of the position errors for the kinematic experiment is presented in FIGURE 8. Overall, the track error in the eastern direction is within ±2 decimeters (at a 95% confidence level). For the northern direction, a larger deviation is observed in the observation time span from 40 to 50 seconds (forward track), where the error in the north direction is close to 4 decimeters. Such a deviation is likely due to close-in MPCs resulting in a degradation of the accuracy for that part of the track. As a consequence, 82% of the position error in this track lies within ±2 decimeters. Outside this time span, the performance in east and north directions is similar.
CONCLUSIONS
This article presents the concept and results of a demonstration of a TNPS that uses WR to synchronize the transmissions of wideband radio ranging signals to achieve decimeter-level position accuracy in multipath environments, such as in built-up areas. A proof of concept of the TNPS was implemented at TU Delft. The developed prototype system demonstrates a decimeter-level 2D positioning accuracy in an urban road-like configuration bordered by built-up surroundings that cause substantial multipath.
ACKNOWLEDGMENTS
The research described in this article is supported by the Dutch Research Council, Nederlandse Organisatie voor Wetenschappelijk Onderzoek. We thank Lolke Boonstra and Terence Theijn from TU-Delft ICT-FM, as well as Rob Smets of SURF, the collaborative organization for ICT for Dutch education and research for their support and expertise on the optical infrastructure, and Loek Colussi and Frank van Osselen of Agentschap Telecom and René Tamboer and Tim Jonathan of The Green Village for their support in realizing the SuperGPS demonstrator. We also thank project partners Koninklijke PTT Nederland (KPN), Optical Positioning Navigation and Timing (OPNT) and Fugro.
MANUFACTURERS
The WR timing nodes V1.15 are by OPNT. The SDR systems for the transmitters and receiver are National Instruments (Ettus) X310 Universal Software Radio Peripherals. The 3-dBi wide-band antennas CM.02.03 are from Taoglas.
CHERIF DIOUF was a postdoctoral researcher in the Department of Geoscience and Remote Sensing at Delft University of Technology (TU Delft).
HAN DUN was a Ph.D. student in the Department of Geoscience and Remote Sensing at TU Delft.
GERARD JANSSEN is an associate professor in the Circuits and Systems Group of the Microelectronics Department at TU Delft.
ERIK DIERIKX is the principal scientist at Electricity & Time at the national metrology institute VSL in Delft.
JEROEN KOELEMEIJ is an assistant professor in the Department of Physics and Astronomy at the Vrije Universiteit Amsterdam.
CHRISTIAN TIBERIUS is an associate professor in the Department of Geoscience and Remote Sensing at TU Delft.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
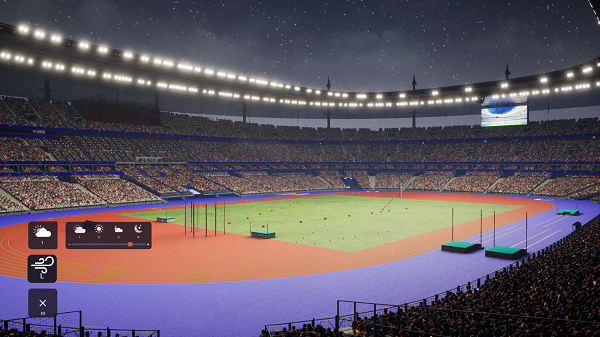
Image: Stadium, OnePlan/Paris 2024 Organizing Committee for the Olympic and Paralympic Games
PARIS OLYMPICS GET DIGITAL TWIN
In an Olympic first, the 2024 Olympics and Paralympics in Paris will receive a digital twin for planning and collaboration. OnePlan’s GIS Mapping and Venue Twin software will be used to create a 3D map of each sports venue and surrounding areas to help event planners, partners and suppliers collaborate in real time. They will be able to see spaces and capacities at any angle, in any light, in any weather condition at any time. Infrastructure such as barriers, fencing, vehicles, teams, volunteers and broadcast cameras can be positioned in the twin. Organizers can plan for any scenario, improving efficiency and safety, as well as take the needs of the disabled into account.
Photo: DeepRoute.ai
HOW WILL THEY SPEND THEIR TIPS?
A fleet of 30 “Robotaxis” – Level 4 autonomous cars – will hit the streets in Shenzhen, China, to showcase an autonomous solution by DeepRoute.ai. The Robotaxis – SAIC Motor SUVs outfitted with DeepRoute.ai’s Driver 2.0 – preview plans for mass production of autonomous vehicles in 2024, including for purchase by consumers. Autonomous cars are classified in five levels, with Level 5 the highest. A human driver can take over a Level 4 vehicle. Level 4 consumer vehicles on the road also gather data that is used to further improve Level 4 autonomous driving.
Switchblade 600. (Photo: AeroVironment)
GHOST DRONES TO HELP UKRAINE
The United States has committed more than $4 billion in security assistance to Ukraine, including on April 21 more than 121 Phoenix Ghost tactical unmanned aerial systems. The drones were rapidly developed by the Air Force specifically to meet Ukraine’s requirements. The Ghost drones are manufactured by Aevex Aerospace and have similar capabilities to the single-use “kamikaze” Switchblade UAS from AeroVironment, which also are being provided to Ukraine forces. The Switchblade 600 shown here is designed to destroy tanks and other armored vehicles. It weighs slightly more than 120 pounds and has a range of more than 40 miles.
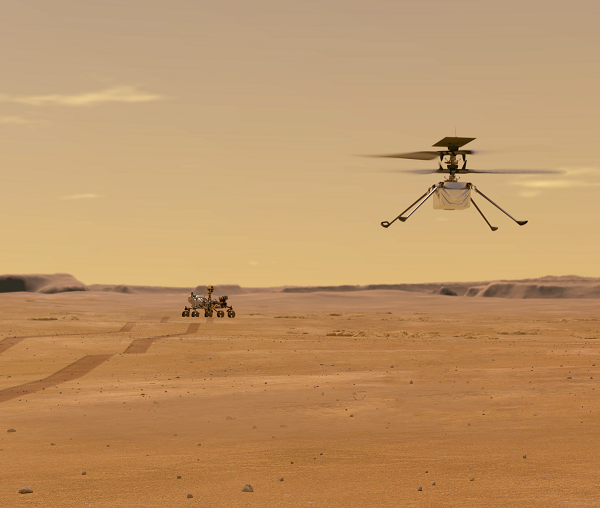
Photo: NASA/JPL-Caltech/University of Arizona/USGS
OUR MARTIAN ADVENTURE
NASA’s Ingenuity UAV has now spent more than a year on the surface of Mars, with 21 flights under its belt. It is now scouting potential routes for its companion, the Perseverence rover. Most recently, Ingenuity traveled to the Séítah region to examine an extinct river delta, covering 1,150 feet and navigating around a large hill, to help determine the best route into the delta. The NASA team continues to gently push the drone’s capabilities to better understand improvements that can be applied to future Mars UAV designs.
By Michael J. Dunn, Space Systems Command, Capability Area Integrator for Positioning, Navigation and Timing
The Global Positioning System is the premier positioning, navigation and timing (PNT) source for more than six billion users worldwide. It is vital to the function of all 16 of the United States’ essential critical infrastructure components. Life as we know it relies on the essential services that GPS provides.
The United States Space Force (USSF) is committed to maintaining a healthy GPS constellation that continues to deliver the “gold standard” of PNT availability and reliability throughout the world. Continuous improvements in equipment and performance have been a hallmark of the enterprise since its inception. 2021 was no exception, with a continued record-setting delivery of new capabilities.
Space Systems Command (SSC) at Los Angeles Air Force Base in El Segundo, California, is laser-focused on delivering the most important modernization in GPS history. The government and industry team are committed to bringing major upgrades to the space, control and user-equipment segments. It is an exhilarating time for the GPS enterprise. The specific updates within each segment cement the continued evolution in GPS and the USSF commitment to delivering advanced capabilities to the nation and the world.
Space Segment
Currently, 37 GPS satellites are on orbit, with 29 satellites set healthy. The baseline constellation requirement is 24 satellites. The system continues to perform in stellar fashion, providing an average 48-centimeter position accuracy throughout 2021.
Orbital systems modernization is focused on the GPS III satellite fleet, and the program continues to deliver peerless capabilities. GPS III space vehicles (SV) 1–4 were all operationally accepted in 2020. In 2021, the most notable event was the launch of GPS III SV05 in June. The satellite successfully achieved operational acceptance and mission-capable status for USSF in just under two weeks: a new record. SVs 6–8 are available for launch and are awaiting their launch windows. SV09 system-level testing is in progress. SV10 component deliveries continue. GPS III provides up to eight times better anti-jam and a new L1C signal to improve user connectivity.
For the GPS IIIF program, the long-range picture remains bright as the contract for GPS IIIF SVs 15–17 was awarded in October 2021. The delivery of the first GPS IIIF is expected early in 2026. GPS IIIF will build upon the tremendous increase in capability provided by GPS III with the addition of a search-and-rescue payload, a laser retroreflector array for precise ranging, a fully digital navigation payload, and a Regional Military Protect capability that will provide 60 times greater anti-jam for operations in electromagnetically hostile environments.
GPS III space vehicle 05 (GPS III-SV05) launched in June 2021 from Cape Canaveral Space Force Base, Florida, aboard a SpaceX Falcon 9 launch vehicle. (Photo: SpaceX)
Control Segment
The next-generation Operational Control System (OCX) continues to execute within its program baseline. OCX will provide enhanced command and control capabilities, modernized architecture, robust information assurance and cyber security.
OCX’s incremental development approach began with OCX Block 0, which is the launch and checkout system (LCS) for GPS III. The LCS successfully supported the launch and checkout of GPS III SV 01–05. OCX Blocks 1 and 2 will control all legacy GPS III satellites and both legacy and modernized signals.
Despite barriers presented by the global COVID-19 pandemic, all 17 global OCX monitoring station installations were completed in July 2021. Most of the remaining equipment was fielded throughout December 2021. System integration and verification continues with transition to operations scheduled for early 2023.
The Next Generation OCX 3F contract was awarded in April 2021. The program will modify OCX to launch and control GPS IIIF satellites with enhanced capabilities. Acquisition Milestone B is expected in 2022, and operational acceptance is planned for 2027.
MGUE: The future warfighter’s battlespace edge. (Image: Space Systems Command Production Corps)
User Equipment Segment
Millions of GPS receivers are fielded, but very few of them can use the military code (M-code) signal that is being broadcast by 24 GPS SVs. To keep our competitive advantage against the adversary, the GPS enterprise is focused on developing modernized GPS user equipment (MGUE) that takes advantage of these signals. The MGUE program is a joint service program developing modernized, M-code-capable military GPS receivers. The program is broken into two increments (Inc 1 and Inc 2). Both are designed to deliver secure PNT performance, allow navigation warfare operations, enhance anti-jam, anti-spoof and anti-tamper, and enable Blue Force Electronic Attack.
MGUE Inc 1 achieved a major milestone in September 2021 with successful testing on the Marine Corps Joint Light Tactical Vehicle (JLTV). The event took place in an electromagnetically degraded GPS environment at White Sands Missile Range, New Mexico. The JLTV is a pathfinder lead platform for the MGUE program. Lead platforms for the other services, the Army Stryker combat vehicle, Air Force B-2 bomber, and Navy Arleigh-Burke Class Guided Missile Destroyer, will commence integration testing in FY23 and FY24.
MGUE Inc 2 development continues to make progress in maturing the next generation ASIC technology required for all weapon-system platforms to provide functionality and backward compatibility. It will deliver a miniature serial interface card in CY26 to support handheld and ground applications. Eventually, MGUE receiver cards will be loaded onto hundreds of Department of Defense (DOD) weapon systems.
GPS III SV04 in Highbay (Photo: Lockheed Martin)
Partner Community
The GPS enterprise is committed to cooperation on a global basis. It works closely with the DOD, the armed services, the U.S. Coast Guard, other federal agencies, the International Civil Aviation Organization and all the other global and regional navigation satellite systems toward the development of PNT in the global commons.
A highlight of this cooperative work is GPS enterprise involvement in the National Executive Committee for Space-Based PNT (PNT EXCOM), which supports the interests of the various federal bodies, especially the Department of Transportation (DOT) and the Federal Aviation Administration (FAA). The PNT EXCOM is applying GPS technology to a broad variety of governmental activities, including the development of the Next Generation Air Transportation System and intelligent transportation systems.
The GPS enterprise commitment to international partners is unwavering. Our support to the North Atlantic Treaty Organization (NATO) is ongoing with support to the Capability Panel 2 for Navigation working toward the integration of MGUE and compatibility arrangements with Europe’s Galileo system. A highlight this year was the first delivery of MGUE loan equipment to the United Kingdom, Canada, Germany, and the Republic of Korea. Germany is the first country to purchase MGUE equipment.
Conclusion
GPS is the foundation of global PNT and a cornerstone of modern life. Improvements to the enterprise are continual. As the nation moves into the complex and dynamic world of the coming decades, the dedicated military, civilian and industry professionals that provide this world-changing capability will continue their challenging and rewarding work. Semper Supra!
The “encapsulation” of a GPS satellite. (Photo: U.S. Department of Defense)
![Figure 32: Geoid rate over CONUS based on the GSFC mascon model [mm/yr] (Image: NOAA)](https://stage.globalpositioningnews.com/wp-content/uploads/2022/05/Geoid-rate-CONUS.jpg)
![Figure 33: Geoid rate over Alaska from GSFC mascon model [mm/yr] (Image: NOAA)](https://stage.globalpositioningnews.com/wp-content/uploads/2022/05/geoid-rate-alaska.jpg)