“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Amazon sued for alleged privacy violations
Photo: Hispanolistic / E+ / Getty Images
Amazon is facing a lawsuit in Washington state, marking the first dispute under the state’s My Health My Data Act. The lawsuit accuses Amazon of violating privacy laws by collecting location data from millions of Americans without their consent through its software development kits used in various mobile applications. The collected data allegedly included information that could indicate a consumer’s attempt to acquire health services, violating the My Health My Data Act, which requires explicit consent for collecting and selling health-related data.
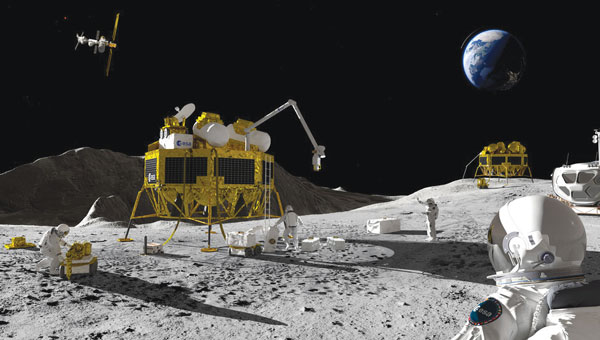
Europe’s first lunar lander underway
Photo: ESA
The European Space Agency (ESA) has partnered with Thales Alenia Space to develop Argonaut, Europe’s first lunar lander. This spacecraft will provide autonomous access to the Moon, supporting international exploration efforts. Starting in the early 2030s, Argonaut will conduct regular lunar missions, delivering infrastructure, scientific instruments, rovers and essential resources for astronauts. Designed to withstand harsh lunar conditions for up to five years, Argonaut will play a crucial role in sustainable lunar exploration, according to ESA.
Leica Geosystems, SCI-Arc equip future architects
Photo: Leica Geosystems
Leica Geosystems and the Southern California Institute of Architecture (SCI-Arc) have partnered to equip future architects with advanced technology skills. Leica is donating more than $200,000 in equipment, including lidar scanners, and offering expert guidance and scholarships to students. SCI-Arc students are applying this technology to create digital archives of Los Angeles structures and visualize rewilded wilderness.
In a recent study published by Nature Communications, researchers share that GNSS spoofing in conflict zones is disrupting wildlife tracking efforts, particularly affecting black-tailed godwits migrating through Eastern Europe. Researchers tagged 15 godwits in Finland in May 2024. Eight of these birds displayed spoofed geolocations during their migrations. The most significant spoofing occurred near Simferopol airport in Crimea, where birds were falsely located while flying over Ukraine or Romania. This spoofing added substantial errors to migration tracks, in one case creating a false 7,200-km round trip.
We each arrived at our current involvement with the GNSS/PNT industry by a different path. For many, it was through engineering, perhaps initially thinking of focusing on completely different challenges than those posed by extremely weak RF satellite signals, intentional interference, or ionospheric scintillation. For others, it was through surveying, which they might have entered to make a living traipsing through open fields — well, traversing them — while working independently and in nature.
For others still, it was through one of the myriad applications of GNSS — from mapping the geographic distribution of the few remaining Amur leopards to guiding a tractor in the field, from commercial fishing in Alaska to conducting search and rescue missions, to training for military raids. Yet for others, it was through business, perhaps because they were tasked to route delivery trucks more efficiently or to track each vehicle in a rental fleet. Professor Richard Langley started out as an applied physicist and a radio tinkerer, building his first radio at the age of 14. My colleagues at North Coast Media got here via a career in journalism, with the steep subject-matter learning curve following their training in writing and editing.
I got here mostly through my passion for maps, charts and navigation. I first became interested in maps as a child — after twice getting lost. The first time, I was 5 years old and lost track of my mother as she entered a store in Berkeley, California, and I kept walking down the street. The next time, I was 7 and had insisted on walking home alone from school in Milan, Italy. I was determined not to let it happen again. So, when I was 11, I was the only kid I knew who walked around Pisa studying a map and a compass.
Next came the topographic maps I used for hiking. In my 20s, sailing around the Boston Harbor islands and off the coast of Maine, I learned to use nautical charts, sextants, radio direction-finders, sonar, radar, Loran C, and, finally, hand-held GPS receivers. I read my first technical article on GPS in 1985, when I was a graduate student in international security at MIT and Harvard, and the U.S. military was building the system. I studied its technical specifications and dreamt about its many possible future applications.
In 2000, when looking for a career change and a job in journalism, I saw a posting for the position of managing editor of this magazine. I applied and 25 years later I am still in the business.
Throughout, I always have been impressed by the deep expertise of the scientists and engineers who created this fantastic GNSS that billions of people use multiple times a day yet take for granted. Those who discount, belittle or even mock the expertise of people who have spent decades studying complex subjects — from climate change to economics, from foreign policy to epidemiology, from education to urban planning — are profoundly unaware and misguided, when not hypocritical. We need experts.
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focus on high-accuracy positioning for autonomous vehicles in various environments. The papers are available here.
High-accuracy and resilient GNSS receiver for autonomous vehicles
The G3STAR GNSS receiver, a key component of the GAMMS Horizon 2020 project, is designed to improve high-definition navigation map production for autonomous vehicles. This Galileo-based receiver leverages the constellation’s Open Service features, including the High Accuracy Service (HAS) and Navigation Message Authentication (OSNMA). The research team shared that G3STAR’s ability to obtain and decode HAS messages from Galileo E6-B signals, as well as to process OSNMA bits from live Galileo E1-B I/NAV messages, demonstrates its advanced capabilities in providing secure and precise navigation data.
Preliminary tests highlight G3STAR’s proficiency in utilizing Galileo’s new services. However, the research team shared that further evaluation is necessary to fully assess its impact within the GAMMS project. Plans include validating the HAS data’s effect on navigation accuracy, conducting field tests to evaluate OSNMA availability in various environments and assessing the influence of the Chip Scale Atomic Clock on receiver performance. Additionally, comparing the G3STAR’s performance to commercial off-the-shelf receivers will be crucial in determining its overall contribution to the GAMMS navigation system and HD map generation. These evaluations will be carried out during upcoming test campaigns, providing valuable insights into G3STAR’s potential to advance autonomous vehicle navigation.
Filipe Carvalho, Ricardo Prata, Bruno Cardeira, Carlota Cardoso, Rui Nunes and António Fernández; “High-Accuracy and Resilient GNSS Receiver for an Autonomous Vehicle.”
GNSS/INS positioning software library
The autonomous vehicle industry has seen significant interest and investment throughout the past 15 years, with numerous practical applications emerging in the market. However, the technology for functionally safe GNSS/INS localization in autonomous vehicles is still not fully established. This gap is particularly crucial in safety-critical applications, where positioning algorithms must be robust against potential faults, especially in challenging environments. This paper highlights Hexagon’s Safety-Critical Positioning Solution, which addresses this need by providing both precision and safety for autonomous land vehicles.
The Positioning System is a safety-first software library that integrates GNSS signals, state space corrections from the TerraStar-X Enterprise service, inertial measurement units (IMUs) and additional vehicle sensors. This system employs an extension of Receiver Autonomous Integrity Monitoring techniques, originally developed for the aviation industry. It computes multiple navigation solutions using a solution separation technique, including an “all-in-view” solution and several subset solutions that exclude various fault hypotheses. These solutions are used to calculate Protection Levels (PLs), which provide an estimated upper bound on positioning errors, accounting for systematic biases and measurement faults. The PLs can be compared against alert limits to determine whether the navigation solution is sufficiently accurate for autonomous decision-making.
Eduardo Infante, Rudi Gaum and Laura Norman; “Demonstration of a Functionally Safe GNSS/INS Positioning Software Library for Autonomous Land Vehicles.”
Unmanned ground vehicles in off-road environments
This paper explores the emerging potential of radar for localization in GNSS-denied scenarios, particularly in challenging off-road environments where lidar-based systems struggle. The research focuses on two distinct settings: a dense forest and an underground mine. To address the localization challenges in these environments, the team developed a pipeline that combines an adaptive extended Kalman filter (EKF) for unstructured forested regions with a factor graph approach that fuses EKF estimates and point-to-plane radar iterative closest point (ICP) measurements for structured underground environments. The results demonstrate significant improvements in localization accuracy compared to existing methods, with the adaptive EKF proving particularly effective in forested areas.
The study provides valuable insights into the integration of radar and IMU data for vehicle localization in GPS-denied scenarios. While the adaptive EKF outperformed conventional EKF in structured outdoor settings, the standard EKF showed better performance in the highly dynamic conditions of the underground mine. The factor graph approach exhibited improved tracking performance, especially in reducing lateral drift along straight trajectory segments. The research also highlights the importance of selecting high-quality ICP registrations for radar-based SLAM. These findings pave the way for future research directions, including refining adaptive EKF for varied environments, exploring radar-based navigation on feature-sparse roads and enhancing the factor graph framework to incorporate additional sensor modalities.
Petar Mitrev and Mohamed Atia, “Radar-Inertial Localization for Unmanned Ground Vehicles in GNSS-Denied Off-Road Environments.”
GNSS plays a vital role in autonomous systems, providing essential positioning, velocity and timing (PVT) information for platforms such as autonomous vehicles, UAVs and ships. However, GNSS vulnerability to spoofing attacks poses significant security risks, potentially disrupting decision-making processes in these systems. To address this issue, researchers have developed a novel approach called Clock Drift Monitoring (CDM) for detecting GNSS spoofing in autonomous vehicles. Unlike previous methods that focused on directly detecting Doppler bias from measurements, CDM indirectly monitors the adverse impact of Doppler bias on the PVT solution, overcoming challenges associated with bias extraction from raw measurements.
The CDM technique exploits user clock drift derived from Doppler positioning as a detection metric. Under normal conditions with authentic GNSS signals, the clock drift remains stable, reflecting the user’s frequency source stability. However, spoofing conditions introduce counterfeit signals with consistent Doppler bias across all measurements, resulting in abnormal clock drift variations. A Generalized Likelihood Ratio Test-based detector identifies these variations, offering a practical and flexible method for GNSS spoofing detection. Field tests have validated the CDM technique’s effectiveness in real-world scenarios, demonstrating its robustness as a solution for autonomous vehicles to counter emerging cyber threats. This method’s ease of implementation, broader applicability and inherent robustness make it a promising approach for safeguarding autonomous systems against counterfeit GNSS signals.
Ziheng Zhou, Hong Li, Yimin Deng and Mingquan Lu Tsinghua; “Clock Drift Monitoring Based GNSS Spoofing Detection Method for Autonomous Vehicles.”
Read a roundup of recent products in the GNSS and inertial positioning industry from the March 2025 issue of GPS World magazine.
Surveying and Mapping
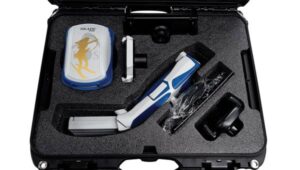
Photo: Eos Positioning Systems
New Eco-Friendly Carrying Case For Eos Positioning Systems’ receivers
The Skadi Gold, Skadi 300 and Skadi 200 GNSS receivers will now be shipped in a field-rugged carrying case made entirely from recycled materials. The case is designed to meet the demands of professionals who utilize GNSS technology in challenging environments. Its construction incorporates durable, eco-friendly materials that can withstand various field conditions, from remote wilderness areas to urban construction sites.
A key feature is its composition of 100% post-consumer recycled resin, which significantly reduces waste and promotes environmental sustainability, according to the company. It is specifically engineered to be shock-resistant and weatherproof.The case is provided as a standard inclusion with every purchase of the Skadi Gold, Skadi 300 or Skadi 200 GNSS receivers at no additional cost.
Multibeam Sonar Designed for bathymetric surveying
The Gemini 1200id is built on the same robust platform as the Gemini 720is multibeam sonar. The device features a 120° horizontal field of view, operating at both 720 kHz and 1,200 kHz acoustic frequencies.
The Gemini 1200id incorporates advanced noise reduction technology to significantly improve the attenuation of waterborne electrical noise to enhance imaging performance. An integrated speed-of-sound sensor ensures high positional accuracy of displayed targets, while CHIRP processing technology enhances target separation over extended ranges.
Compatibility with Tritech’s Genesis software package allows users to control multiple Tritech products from a single interface to streamline operations. The company has also made software development kits available for Windows and Linux operating systems to integrate into various platforms. The sonar’s design includes a custom-developed analog front-end solution with fully differential receiver channels, making it ideal for longer-range applications.
HiPer XRa is a GNSS receiver for surveying, mapping and construction applications. It can benefit a wide variety of users, including construction professionals, surveyors, geographic information systems (GIS) professionals, archeologists, engineering firms and more. The HiPer XR supports GPS, GLONASS, Galileo, BeiDou, IRNSS, QZSS and SBAS.
The new receiver has advanced Topcon Integrated Leveling Technology (TILT) compensation, featuring a calibration-free and magnetic interference-immune integrated IMU that provides up to 60° of tilt for precision measurements in challenging positions. It has signal integrity protection, anti-jamming and anti-spoofing capabilities. Through the myTopcon NOW! website, users can access online training materials, firmware updates and additional software resources.
Airborne Lidar System Ideal for coastline and river surveying
CoastalMapper is an airborne bathymetric lidar system for coastline and river surveying. The CoastalMapper can survey coastlines and rivers 250% faster than previous sensor models, according to Leica Geosystems.
It is suitable for various mapping applications, from assessing infrastructure resilience to monitoring river floods and conducting environmental investigations.
It features a high-performance bathymetric lidar module, a Leica TerrainMapper-3 topographic lidar and an imaging sensor, integrated into a compact and lightweight sensor head. This allows the CoastalMapper to capture up to 1 million bathymetric data points and 2 million topographic data points per second while providing high-resolution imagery with a 5-cm ground sampling distance at typical flying heights.
It integrates with Leica Geosystems’ airborne mapping workflows and offers cluster processing capabilities, allowing users to analyze large datasets and reduce the time from data collection to final deliverables. These outputs can include classified point clouds, digital terrain and surface models, and various imaging products.
Surveying Kit Streamlines base station and checkpoint setup
WingtraGROUND, a comprehensive survey kit, streamlines base station and checkpoint setup for on-site post-processing kinematic surveys with the WingtraONE Gen II, a vertical takeoff and landing UAV. The kit combines receivers, checkpoints and tools into a single, portable workflow.
The system integrates hardware components with a Wingtra tablet interface, which can help surveyors confirm correct receiver placement and avoid common errors associated with improper base station setup and inaccurate coordinates.
Wingtra receivers, equipped with Emlid Reach RS3 technology, provide accuracy within 2 cm, meeting high standards for aerial data validation. These receivers can also function independently for terrestrial surveys in real-time kinematic mode, including point collection and stakeout for various applications.
Galileo HAS-Enabled Receiver Offers positioning capabilities with 20 cm accuracy
The Geode GNS3H supports Galileo High Accuracy Service (HAS). It offers positioning capabilities with 20 cm accuracy worldwide without requiring additional infrastructure or subscriptions.
It is built to withstand tough conditions, making it ideal for demanding fieldwork. The device offers various accessories, including the Geode Grip, which combines the Geode with a data collection device of choice into a single handheld solution. A backpack strap kit and survey pole are also available to enhance mobility and flexibility in the field. The GNS3H can be used for surveying, agriculture, construction, forestry, mining and archaeology.
Expanded Mapping Portfolio 3D mapping technologies and more
Topcon Positioning Systems has become an authorized distributor of Pix4D’s photogrammetry software portfolio.
The partnership aims to enhance reality capture solutions across various industries, including surveying, mapping, utilities infrastructure, public safety, forensics, and architecture, engineering and construction.
The agreement streamlines the procurement process for end users by allowing them to access Pix4D’s advanced photogrammetry software solutions through Topcon’s global distribution network.
The GNSS real-time kinematic (RTK) 5 Click — a compact add-on board for high-precision positioning and navigation demands — features the UM980, an all-constellation multifrequency RTK positioning module from Unicore, with the advanced NebulasIV SoC for enhanced performance.
It supports Swift Navigation’s Skylark precise positioning service, multiple GNSS constellations and RTK positioning for centimeter-level accuracy. The board also features JamShield technology for robust performance in challenging environments, USB connectivity for easy configuration and visual status indicators for module status and GNSS signal reception.
It can be used for a variety of applications, including surveying and mapping, precision agriculture, UAVs, autonomous robots and autonomous driving.
Multi-Band GNSS Antenna Can operate in urban environments
Levity Series’ AHP24510 (L1/L2/L-Band) and AHP54510 (L1/L5/L-Band) directional patch antennas are designed to receive signals from GPS, Galileo, GLONASS and BeiDou satellite constellations.
These antennas offer faster and more accurate signal acquisition and lock, specifically in urban environments. The L-Band capability allows compatibility with high-precision GNSS correction services. The multi-band antennas offer integral redundancy to minimize satellite security blind spots and reduce energy consumption due to faster acquisition, requiring less system uptime to save power.
The Levity Series active antennas feature a 45 mm x 45 mm x 10 mm wide-band, dual-stacked patch design with a dual-feed, low noise amplifier, providing 28 dB to 29 dB gain and filtering. They operate with a maximum antenna VSWR of 1-to-1 from 1,207 MHz to 1,603 MHz, and the passive antenna efficiency ranges from 39.93% to 68.51% in the L1 band. These antennas use right-hand circular polarization to mitigate multi-path interference.
The Levity Series includes other multi-band products for high-precision applications, such as the HP24510A and HP54510A stacked-patch passive components, and the TFM.120A surface-mount front-end module, which covers the full multi-band GNSS spectrum including L-band. These antennas are suitable for various applications, including wearables, transportation, robotics, precision agriculture and autonomous vehicles.
The M9PLUS-HCT-A-SMA is an active multi-frequency GNSS antenna designed for high-accuracy applications. It supports L1/L2/L5 GPS, Galileo, Beidou and GLONASS bands, as well as L-band correction services. The antenna utilizes Maxtena’s proprietary Helicore technology, which offers advanced pattern control, polarization purity and efficiency in a compact form factor.
It integrates a pre-filter specifically engineered to mitigate LTE interference. This is crucial for maintaining signal integrity in environments with dense mobile communication networks, where LTE signals can overlap with GNSS frequencies. The pre-filter can effectively block out-of-band LTE signals, reducing intermodulation risks and ensuring clear GNSS signal reception.
The M9PLUS-HCT-A-SMA is built with rugged, IP67 automotive-grade components and includes an integrated SMA connector. It also features an O-ring for enhanced environmental sealing. Weighing only 24 grams, the antenna is ground plane-independent, making it versatile for various installations. It is particularly well-suited for GIS and RTK applications where high accuracy and reliability are crucial.
The MostaTech G321M is a three-axis fiber optic gyroscope (FOG) that offers high-precision navigation and orientation measurement capabilities. This advanced sensor features a data rate of 8 kHz.
Key features of the G321M include an input range of 400° per second, a bias RMS of 1° per hour and an angular random walk of 0.025 °/√h. Additionally, it has a power consumption of 2 W and an initialization time of 1 second. The G321M is designed with a compact form factor, making it suitable for various applications where size and weight are critical factors.
It is ideal for UAVs, robotics, borehole surveys, image stabilization, gimbal stabilization and underwater vehicles.
High-Precision Lidar Designed for precision applications
The TV1 Lite and the TV1 UAV systems are designed for various precision applications, such as mapping and data collection.
The TV1 Lite features TrueNav technology, a Hesai 32-channel laser scanner and a FLIR 5MP global shutter camera with a 90° field of view. It also includes one year of TV1 Lite Annual Processing with support and maintenance.
TV1 offers customization options, allowing users to choose from 26 MP, 45 MP or 61 MP cameras and various Trajectory Correction Service options.
Flight Control System With autopilot functionality
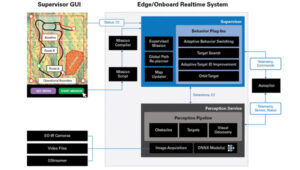
The Prism Supervisor software combines UAV autopilot flight control systems with AI-based observations processed in real time, aiming to enhance UAV operations.
The system provides a programming framework and software development kit for users to create custom mission scenarios. During flight, Prism Supervisor can adapt its autopilot functionality in real time, generating mission segments and flight plans as needed.
The software features a user-friendly graphic interface for mission planning, real-time visualization and execution. It supports Windows, Linux, macOS, iOS and Android.
Remote ID Receiver Enhances airspace awareness and UAV safety
RIDER is designed to enhance situational awareness by providing real-time detection of UAV activity in sensitive areas. It also seeks to provide a clear visibility of surrounding UAV operations to help avoid potential collisions and ensure safer flight experiences.
The device features a built-in industrial chip SIM that provides global coverage through LTE-M and NB-IoT, ensuring connectivity in various environments.
It operates effectively within a temperature range of -20 °C to +60 °C and is rated IP54 for dust and water resistance. The device complies with ASTM F3411-22A and ASD-STAN EN 4709-002 standards, making it suitable for regulatory environments.
The RIDER can detect signals from up to 5 km with its default antennas and up to 10 km when using an optional high-performance antenna. It is equipped with an internal cellular and Bluetooth antenna, along with an integrated GNSS antenna that provides precise positioning and timestamping capabilities. It supports multiple GNSS frequencies and utilizes Bluetooth and Wi-Fi technologies for Remote ID communications.
Streamlined BVLOS Operations For a variety of applications
The Sentaero 6 UAV is designed for advanced over-the-horizon operations beyond visual line of sight (OTH-BVLOS). It features built-in AI and machine learning capabilities for real-time data processing. The system can be used for surveying, mapping, inspection, asset monitoring and more.
Engineered to streamline operations, the Sentaero 6 offers more accurate and up-to-date intelligence on assets. Its onboard computer can processes data mid-flight.
Future developments will include swarm operations, enabling one human to control multiple UAVs simultaneously; fully remote operations and higher safety standards, such as a parachute for urban missions, according to Censys Technologies.
SBG Systems has significantly updated its Ellipse series sensors, incorporating the latest World Magnetic Model (WMM) to enhance accuracy and reliability in navigation applications. This upgrade is available for all Ellipse sensors, including first-generation models.
Designed for unmanned systems such as UAVs, UGVs and marine platforms, the Ellipse series comprises compact, high-precision inertial sensors. These devices feature built-in three-axis magnetometers that measure Earth’s magnetic field, crucial for accurate heading and positioning data.
Updated every five years, the WMM is a globally recognized mathematical representation of Earth’s magnetic field. The latest version, released in December 2024, ensures precise heading and positioning corrections to account for ongoing geomagnetic changes.
NDAA-Compliant UAV Now integrated with ArcGIS Flight
Esri now supports the Astro Max UAV in its ArcGIS Flight application. The Astro Max is the first Blue UAS-cleared and NDAA-compliant UAV to integrate with Esri’s platform.
The Astro Max, developed by Esri partner Freefly Systems, adheres to the security and performance standards set by the National Defense Authorization Act and the Defense Innovation Unit’s Blue UAS initiative. This industrial UAV is designed to enhance the capabilities of government and enterprise users utilizing ArcGIS Flight.
Autonomous Swarm Control Controls various autonomous platforms
The Autonomous Multi-Domain Operations Resiliency Platform for Heterogeneous Unmanned Swarms (AMORPHOUS) software features a single-user interface to operate thousands of autonomous assets simultaneously. Designed with an open architecture, this software enables the U.S. and allied militaries to control a mix of uncrewed platforms, payloads and systems.
AMORPHOUS includes an intuitive and distributed command-and-control interface to give operators the flexibility to conduct a wider array of intricate military missions. This collaborative autonomy at scale will provide warfighters with a decisive overmatch capability.
L3Harris is developing prototypes using the AMORPHOUS architecture on contracts for the U.S. Army and the Defense Innovation Unit. AMORPHOUS has demonstrated flexibility and interoperability by controlling multiple, separate assets across multiple vehicle types operating in different domains during government-managed tests.
AMORPHOUS supports decentralized decision-making, which enables individual, uncrewed assets to perform tasks autonomously and make real-time tactical decisions inside the network.
Advanced Counter-UAV Radar Multi-console radar control and display system
Cambridge Pixel has developed a radar control and display system for Weibel Scientific’s XENTA surveillance radar, which is designed for modern air defense and counter-unmanned aerial systems (C-UAS) applications.
The XENTA radar includes 3D target tracking, continuous target illumination and synthetic receiver beamforming. It is available in two configurations: the XENTA-M for short-range air defense and the XENTA-C for C-UAS operations.
The system is designed to work seamlessly with third-party command-and-control systems, enhancing operational efficiency.
Cambridge Pixel’s library of radar processing software allows users to develop a tailored radar controller specific to the XENTA radar’s requirements. Enhancements were made to existing functionalities, such as improved MIL-STD-2525 overlay graphics and support for dual-redundant operator consoles.
The XENTA radar system can detect small UAVs at distances exceeding 7 km and classify them beyond 5 km. This capability makes it suitable for various applications, including airport security, border control, critical infrastructure protection and event security.
The Pelican 2 agricultural spray UAV has an expanded 300-liter payload capacity and can cover up to 5.3 ha/hr.
It incorporates several technological enhancements designed to meet the demands of agriculture applications. The aircraft features an upgraded four-motor electric propulsion system, a wider 18-m spray swath and advanced lidar and radar systems for fully autonomous day-and-night spraying. These improvements aim to increase efficiency and precision in aerial application while reducing operational costs for farmers.
The Pelican 2’s airframe and structural components are constructed from carbon fiber composites, corrosion-resistant metallic components and 3D-printed assemblies.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Autonomous vessel completes sea trials in Norway
Photo: Kongsberg Maritime
The Reach Remote 1, an uncrewed surface vessel developed by Reach Subsea in partnership with Kongsberg Maritime and Massterly, has been officially delivered after extensive sea trials overseen by Det Norske Veritas and the Norwegian Maritime Authority. This 24 m vessel is equipped with advanced hull-mounted survey sensors and a Work Class Electric ROV, designed to enhance subsea operations by improving efficiency, safety and environmental sustainability.
ESA in search of very low-Earth orbit technologies
Photo: VLEO
The European Space Agency (ESA) is seeking innovative space application ideas for very low-Earth orbit (VLEO), an orbital region between 100 km and 450 km. This initiative aims to explore new frontiers in space technology by soliciting creative solutions from researchers and innovators. ESA said VLEO presents several advantages, including reduced launch costs, enhanced Earth observation capabilities and a more harmless radiation environment. ESA is particularly interested in proposals addressing technological challenges specific to this orbital regime, such as atmospheric drag mitigation, advanced propulsion techniques and specialized satellite designs.
Car tracking leads to successful arrest
Photo: StarChase
The Pinole, Calif., Police Department utilized the StarChase GPS-based tracking system to safely apprehend suspects in a stolen vehicle. Instead of engaging in a dangerous high-speed chase, officers launched a GPS-enabled tracker that stuck to the vehicle, offering real-time location tracking. The Pinhole Police Department told The Richmond Standard, “This operation highlights how technology and collaboration keep our community safe — by reducing the dangers of high-speed pursuits while ensuring accountability and swift action.”
3D mapping of New Zealand coastline
Photo: nazar_ab / E+ / Getty Images
New Zealand has launched a coastal mapping project to help communities understand and mitigate climate change impacts. Led by Toitū Te Whenua Land Information New Zealand, the initiative will use lidar technology to create detailed 3D maps of up to 40% of the country’s coastline throughout three years. The $30.2 million project involves mapping 4,780 square km of coastal and seafloor terrain using specially equipped planes with high-resolution scanning equipment. Two suppliers, Woolpert NZ and NV5 Geospatial, will conduct the mapping across the North and South Islands, beginning in regions such as the Bay of Plenty and Invercargill.
When we discuss the security of GNSS/PNT systems, we nearly always focus on interference — i.e., meaconing, intrusion, jamming or spoofing. However, GNSS/PNT systems are embedded in systems of systems that also offer many other opportunities for cyberattacks.
What should we do about it?
Ellen Hall
“The key is platform architecture, specifically ensuring robust spatial and temporal partitioning between safety-critical and non-safety-critical functions. Safety-critical functions, such as navigation and autopilot, must be isolated from non-safety-critical functions, such as mission compute, where artificial intelligence typically operates. This partitioning minimizes the scope and effort required to produce design assurance artifacts for airworthiness certification. Additionally, it enhances security by reducing potential attack vectors through the isolation of safety-critical and mission-critical capabilities.”
— Ellen Hall Imminent Federal
Mitch Narins
“An old mariner’s proverb is: ‘The prudent mariner never relies solely on any single aid to navigation.’ A more recent statement offers: ‘With so many pieces of sophisticated electronic equipment at our beck and call it would seem some are lulled into complacency and are ignoring basic seamanship.’ In September 2018, the U.S. Naval Institute published an article titled, ‘Professional Mariners Cannot Rely on Electronics Alone.’ The recent news that the U.S. ITAR restrictions on multi-element antenna arrays will be lifted (thanks to many in our community who have lobbied hard for this for many, many years) is excellent news. It will help and was a necessary change — but it is not sufficient. It certainly does not remove the need to pursue complementary, PNT solutions that will ensure the safety, security, and economic well-being of PNT users and their PNT-dependent systems worldwide. From a basic systems engineering perspective, incorporating multiple solutions with independent failure mechanisms is ultimately the end product that we in the PNT community should all be seeking. We must not forget, however, a key element of many of these systems: the human in the loop, who, if continually provided the opportunity to train in PNT-challenged environments, often can be the ultimate system safety element. This will require the design of our PNT services to ensure that the human factors designed into these systems include sufficient information for the human component to understand an off-normal situation and have the training and skills to take the appropriate corrective actions.”
It cannot be denied that people are seeing more objects flying in the night sky. It is suspected that these are unauthorized UAVs collecting information over U.S. and international military bases and, well, also over people looking up at the sky in their backyards at night. It is unlikely that these unidentified flying objects are causing much harm to the civilian population other than being a curiosity. However, it remains unclear what they might be doing over military installations.
In November and December 2024, numerous reports emerged of UAVs surveilling residential neighborhoods, restricted zones and critical infrastructure across the Northeast United States. This includes areas such as water storage facilities, transmission lines, railway installations, police departments — both local and federal — and military bases.
Military bases reporting UAV overflights included Wright-Patterson Air Force Base in Ohio, Picatinny Arsenal and Naval Weapons Station in New Jersey and Ramstein Air Base in Germany. In the UK, Royal Air Force (RAF) bases at Lakenheath, Mildenhall, Feltwell and Fairford in the South of England all reported unauthorized UAV overflight activity, which is somewhat concerning for nuclear weapons bases in Europe. Lakenheath appears to have scrambled F-15s to investigate one such UAV incursion.
Detecting and mitigating threats
In the United States, the increased intensity of UAV sightings has residents and Congress concerned, while various authorities claim that most of these incidents are harmless. A joint statement by the Department of Homeland Security, the Federal Bureau of Investigation, the Federal Aviation Authority (FAA) and the Department of Defense stated:
“Having closely examined the technical data and tips from concerned citizens, we assess that the sightings to date include a combination of lawful commercial drones, hobbyist drones, and law enforcement drones, as well as manned fixed-wing aircraft, helicopters, and stars mistakenly reported as drones. We have not identified anything anomalous and do not assess the activity to date to present a national security or public safety risk over the civilian airspace in New Jersey or other states in the Northeast.”
Nevertheless, these agencies reported, “Local commanders are actively engaged to ensure there are appropriate detection and mitigation measures in place.”
No other major announcements have followed these incidents, but it would seem logical that military bases have begun activating existing detection and defensive systems. Known countermeasures may include specialized radar, laser, optical, acoustic and radio frequency (RF) detection and defensive systems.
Radar always has been employed to detect airborne intruders, and the reflections from them appear on a display, which the ground user can then align with a range of potential defenses. However, UAVs are generally small, while conventional radar is designed to pick up hefty reflections from the surface of full-size commercial and military aircraft.
Photo: Robin Radar Systems
Robin Radar Systems
Robin Radar Systems in Holland has worked to refine radar that can detect small flying objects. Birds can cause havoc at airfields where aircraft take off and land at high rates, so detecting birds for airfield operators is one angle for which Robin Radar Systems has developed a reflection capability. A large bird and a UAV might be very similar in size. To differentiate the two, the company found a way to see a Doppler effect (speed differences) within a radar return, which indicates the spinning rotors of a UAV rather than flapping wings — a system they term micro-Doppler radar. This detection system works to find objects many miles away and at well-defined approach angles from the radar antenna. Therefore, these X-Band radars are mostly based at the places you want to protect, such as airfields. Some radars also can be packaged to be transportable, perhaps for military applications, where a temporary base needs to know if enemy attack UAVs might be on their way.
Other principal detection systems include “sniffing” RF frequencies to detect UAV control signals, but this has a shorter range than radar and does not easily determine distance or approach angle without several triangulating bases. Additionally, of course, UAVs without control signals cannot be detected with this particular RF technology. Optical systems using still/video/infrared (IR) cameras are good in daylight, but not so good in the dark. Acoustic systems use microphones or an array of microphones to listen for rotor sounds but have a shorter range (less than 1/3 of a mile).
Then, if you have suitable defensive capabilities, you could either take down an unwanted UAV by flying a counter-UAV to collide with and destroy it or by trapping it in a net. In a military situation, many UAVs have been shot down by various types and calibers of guns — and even by very expensive missiles. Electronic defenses include jamming guidance and/or control signals by transmitting signals that overcome and scramble the GNSS and/or control signal or by frying its electronics using high-power microwave transmissions or high-powered laser(s) — these last two systems are expensive and heavy, which makes them cumbersome.
Spoofing the on-board GNSS receiver by transmitting false satellite signals to steer the UAV away from its target recently has been used by Ukrainian forces to steer attack UAVs back into neighboring countries.
GNSS jamming is widely used, and there are numerous equipment suppliers; however, spoofing systems are less common due to their additional complexity and cost. Some RF systems can collect data from the opposing UAV and even detect where the operator might be located.
Of course, not all UAVs straying into restricted airspace come from operators with bad intentions — some might be “Sunday-driver” recreational UAV flyers who have allowed their UAVs to stray into the wrong area. This is another reason the FAA requires formal UAV operator training and certification for commercial operations, but this is not required for recreational UAV flyers.
DroneHunter drone net capture system. (Photo: Fortem Technologies)
FAA regulations
The FAA regulations for UAVs are fairly easy to understand, and it would probably take an intentional effort to fly unauthorized into restricted airspace. Otherwise, stay at or below 400 ft, don’t exceed 100 mph, don’t go where you shouldn’t, file a flight plan — ask permission using the automated FAA LAANC online tool — but always stay within visual range of the UAV. Those are most of the basics. Additionally, to operate a UAV commercially, you must also register it with the FAA and install an electronic device to tell everyone in the surrounding airspace the drone’s registration number, which is traceable to the owner/operator. Never fly near clouds, comply with local rules when flying recreationally, and never, ever fly into restricted airspace, particularly around airports, without prior authorization.
These multiple reported UAV incursions violate FAA regulations, so it is reasonable to assume the operators are deliberately flying illegally. Recreational flying requires the operator to see the UAV at all times — so flying at night is not legal either, as the rules state not to fly an hour after sunset or an hour before sunrise. Operators in restricted airspace are committing a crime punishable by fines and/or years in prison. Yet they still fly, so are they nuisance operators who don’t care or is the activity criminally motivated or orchestrated offshore?
Utilizing UTM
Would the coming unmanned aircraft system traffic management (UTM) have been able to keep these intruders away? I am not sure, but UTM is designed to manage UAV traffic, so presumably, it could manage these UAVs to comply with traffic requirements. However, these intruders are already ignoring existing laws, so UTM may more readily enable the identification of rogue UAVs and operators. Recent tests at the FAA/NASA UTM test range in North Texas have drawn huge interest from Walmart and Amazon, as they push to get UAV package delivery working. Wing now delivers for Walmart using a production UTM system in Dallas and Fort Worth, Texas.
To wrap this up, amongst many recently reported unidentified flying objects, several have been identified as probable UAVs, and some of those over restricted areas could be detected and managed with existing technologies. FAA regulations ban flights in restricted airspace unless approved — i.e., working in coordination with those ground facilities. There are UTMs for UAVs already being used commercially, which could assist in managing all UAVs.
Machine control systems, which combine positioning sensors — both GNSS receivers and inertial systems — with computer displays, give operators better insight into and control over their work. Whether moving dirt on a construction site, spraying crops on a large farm, or moving cargo containers in a port, machine control increases efficiency and precision while decreasing accidents and fuel consumption.
Machine control systems enable operators to accurately position buckets, blades and other implements on their machines without having to first survey and stake the work site, or having to constantly check their work. They give operators a clear reference between the position of the machine bucket or blade and the design surface, thereby increasing their productivity and accuracy. They also utilize labor and equipment efficiently to reduce costs and minimize wear-and-tear. Finally, by collecting data during their operations, they help teams communicate better and share models.
Machine control, which first began to be implemented in the 1990s, is being increasingly adopted across a variety of different types of construction equipment — including graders, dozers, and, more recently, excavators. Now, beyond simply providing operators with a visual guide to the position of their buckets or blades, automated machine control moves the blade to grade by talking directly to the machine’s hydraulics, enabling new or less-skilled operators to perform like long-time professionals and increasing the speed and precision of even the most experienced operators.
The three case studies in this cover story highlight the need for precision control of the implements on earth-moving machines, the importance of good data and the need to make the process as easy as possible for the operator.
The Maldives consists of numerous coral reef islands with low soil-bearing capacity. Using heavy machinery in such an environment requires careful management of movement and precise operations while avoiding damage to local coral reef ecosystems, thus preserving marine life and the natural landscape of the islands.
using heavy machinery among sensitive coral reefs requires careful movement and precise operations to avoid damaging them. Photo: ComNav
As an advanced construction solution, ComNav Technology’s XE100 Guidance System for Excavator employs high-precision GNSS positioning and heading technology coupled with inertial sensors. In construction projects in the Maldives, the XE100 not only provides precise guidance for operators on land but also enables efficient and precise underwater operations in complex marine environments while minimizing ecological impact. Its excellent performance has brought significant benefits to construction projects in the Maldives.
The Maldives’ construction environment is complex and variable, requiring precise equipment to adapt to diverse terrain. The XE100 supports multi-constellation multi-frequency GNSS, delivering centimeter-level accuracy. This ensures that, whether for leveling, slope cutting, or digging, the system delivers precise instructions for bucket operations and guarantees accurate excavator positioning, even in challenging conditions.
ComNav technology’s Xe100 GNSS machine control system delivers centimeter-level accuracy in complex and variable environments. Photo: ComNav
For scenarios requiring underwater operations or mixed land and water tasks, the XE100 overcomes the traditional challenge of locating exact coordinates. The GNSS tablet’s intuitive display of coordinate points helps operators identify work areas and select appropriate excavation actions. This ensures safety, reduces technical barriers, minimizes the need for rework, and significantly enhances construction quality while maintaining high efficiency and precision.
Construction projects in the Maldives often face challenges such as high humidity, high salinity and frequent vibrations. Each component of the XE100 is designed to withstand harsh environments with excellent durability. The system’s modular design also supports expansion to other construction machinery, enhancing flexibility and paving the way for future technological upgrades.
As a nation abundant in marine resources and dependent on tourism, ongoing infrastructure development and maintenance are critical to the Maldives’ economy. The XE100 system improves construction accuracy, reduces operation time, ensures safety, and lowers costs, thereby accelerating project timelines.
Machine control and automation for snow management
The allure of pristine slopes and perfectly crafted terrain parks has always drawn adventurers to the mountains, but the landscape of snow management is shifting dramatically. With rising temperatures and unpredictable weather patterns, climate change poses a significant challenge to the snow sports industry. Natural snowfall is becoming less reliable, leaving resorts dependent on costly snowmaking systems that strain resources and budgets.
Leica Alpine Office enables resorts to achieve operational goals while safeguarding the environment by precisely managing snow management and reducing waste. Photo: Leica Geosystems
For snowparks, these challenges are even more acute. Crafting intricate features such as halfpipes, jumps and rails requires precision and significant amounts of snow — an increasingly scarce resource. Amid these difficulties, the need for sustainability has never been more pressing.
The tech that’s changing the game
Leica Geosystems’ snow management solution, the Leica iCON alpine, paired with Prinoth snow groomers, is helping resorts get more out of less, making the construction of snowparks more efficient and sustainable.
The Leica iCON alpine system leverages GNSS and advanced inclination sensors and inertial measurement units (IMUs) to measure and manage snow depth accurately. Mounted on any snow groomer, this system continuously collects data, ensuring that operators can see the exact snow depth beneath the blade and tracks — accurate to within ±3 cm. In other words, it’s like X-ray vision for your snowcat.
The Leica Icon Alpine, paired with Prinoth snow groomers, is helping to make the construction of snowparks more efficient and sustainable. Photo: Leica Geosystems
Need a perfect jump? Create a 3D model and import the data, which can be read on the screen inside the groomer’s cab. It even handles tricky terrain with features like avoidance zones and anchor point searches. This setup doesn’t just make slopes look good; it helps operators work smarter, not harder.
Snow measurement for World Cup Slalom course
For the past two years, Killington Mountain Resort in Vermont has been utilizing the Prinoth Connect Snow Measurement system powered by the Leica MC1 software.
Killington is one of the first resorts in North America to invest in snow measurement, and it has been vital to executing the Women’s Slalom and Giant Slalom World Cup builds in 2023 and 2024. Killington has the snowmaking capability to cover the race trail, Superstar, with snow in about 100 hours. With the software, the teams can read the snow depth to +/- 3 cm, using snow measurement sensors instead of long metal probes. The software helps increase the efficiency of both snowmaking and grooming, making the build easier for the grooming operators, more straightforward for officials, and safer for the racers.
Leica’s machine control solution has been vital to precisely executing the Women’s Slalom and Giant Slalom World Cup builds. Photo: Leica Geosystems
From the snow to the dirt
However, Leica Geosystems machine control technology is a year-round solution thanks to its versatile Leica MC1 platform, which allows the same hardware used for snow grooming to seamlessly transition into off-season applications such as summer earthworks, trail construction and road maintenance. With a single investment, resorts get a multipurpose tool that eliminates the need for separate systems, cutting costs and complexity.
For instance, in the summer months at the Rieberalp in Davos Rinerhorn, the Leica MC1 solution powers excavation work for projects such as creating a reservoir and ensuring precise and efficient earthmoving. In the winter, the same system transitions to snow groomers, optimizing snow management on the slopes. This effortless switch between applications highlights the adaptability and value of the Leica MC1 platform, enabling ski resorts to get the maximum out of their investment while maintaining top performance year-round.
Technology for more sustainable snowparks
With precision snow management and reduced waste, resorts can achieve operational goals while safeguarding the environment. Adopting digital solutions such as these ensures that ski resorts and snowparks can continue to deliver world-class experiences for generations to come.
Te Ara Tupua is an initiative by the New Zealand Transport Agency aimed at enhancing transport resilience while establishing a walking and cycling route between Wellington and Lower Hutt. The Te Ara Tupua Alliance includes the NZ Transport Agency and its design and construction partners: Downer NZ, HEB Construction and Tonkin + Taylor. To execute this project, the NZ Transport Agency is collaborating with Taranaki Whānui ki te Upoko o te Ika and Ngāti Toa Rangatira as iwi mana whenua. This collaboration inspired the name Te Ara Tupua, referencing the Māori creation story in which Ngake and Whātaitai, two tupua (ancient beings), formed Te Whanganui-a-Tara (Wellington harbor).
The Ngā Ūranga ki Pito-One section of Te Ara Tupua will be built on the harbor’s edge, from Ngā Ūranga Interchange to Honiara Te Puni Reserve in Pito-One and connect with the new Pito-One to Melling section. The project will deliver a new resilient coastal edge protecting the road and rail while providing transport options and a safe route for walking and cycling between the two cities.
The solutions involved include:
Trimble Marine Construction System
Trimble SketchUp
Trimble Stratus Software
The benefits of the project include:
Reduced project timeline.
Improved safety for construction crews and the public.
Increased productivity.
Higher precision placement of embankment blocks.
Reduced environmental impact.
Real-time progress visibility for stakeholders.
Te Ara Tupua will deliver a new resilient coastal edge protecting the road and rail while providing new and safer transport options. Photo: Trimble
Te Ara Tupua is currently under construction along the western coastline of Te Whanganui-a-Tara with the aim of being completed in 2026. The Pito-One to Melling section of Te Ara Tupua is the first completed section of the project and was delivered by the contractors, Fulton Hogan.
The Pito-One to Melling section is a 3 km separated cycling route stretching from Pito-One to the Hutt River Trail near Bridge Street. The new path eventually will join the Ngā Ūranga to Pito-One section of Te Ara Tupua, which connects to the Hutt Road and Thorndon Quay.
The construction of Ngā Ūranga to Pito-One section of Te Ara Tupua includes a 4.5 km shared path, shared path bridge, rock revetments, seawalls and landings. To protect the shared path, road and rail line against wave action, erosion and sea-level rise, an essential part of the new pathway is the construction of embankments (or revetments).
Underwater resilience
Te Ara Tupua is the first project where seismic performance has been considered and tested in the design elements, including the new seawall built over a large active faultline.
Two main types of material are required for this project. Rock is being used for the revetment (the sloping rock seawall), which will protect the reclamation and the path from the sea while the remaining material is general fill. These are being sourced in Taranaki and Golden Bay with rock from Golden Bay being transported by barge, greatly reducing the number of truck movements.
XBlocPlus units are a unique cost-effective solution for Te Ara Tupua. These blocks are poured in the shape of an ‘X,’ which interlock and stack on top of each other to create a seawall with a steeper incline.
Using these interlocking concrete blocks reduces the seawall’s physical footprint and impact on the marine environment, enabling the project to use less material at a lower cost compared to a rock revetment.
Through this innovation, the project team of engineers and ecologists (Te Ātiawa, Ngāti Maniapoto, Ngāti Tūwharetoa and Ngāti Apa) worked alongside lead cultural designer, Len Hetet to combine cultural and environmental design, which resulted in Te Ripowai, the unique Te Ara Tupua ecological XblocPlus unit. Te Ripowai speaks of the rippling water and connects to a Te Ātiawa whakatauki of guardianship. The guardians must keep the ripples occurring, else water becomes still and life will cease to exist. Te Riopowai includes surface patterns and textures to encourage growth of marine plants.
The Ngā Ūranga to Pito-One pathway shoreline ultimately will have 6,663 of these blocks of varying shapes.
operators of excavators with grapple attachments needed to move eight different block shapes into place with an 80 mm tolerance. Photo: Trimble
Block placement
Placing these blocks with precision and speed initially created some concern for the project team. Operators in excavators equipped with grapple attachments needed to move the units into place, initially about 4 m underwater, to a tolerance of about 80 mm to assure embankment strength. To further complicate the construction, there are eight different block shapes.
It’s a task purpose-built for real-time digital twins and machine guidance, according to the Alliance. With help from SITECH, the survey team looked to its digital assets.
First, Jan du Preez, survey manager with the Te Ara Tupua Alliance, relied on Trimble SketchUp to accurately model the individual blocks. Then, the team combined the Trimble Marine Construction (TMC) System with a digital model of the excavator. Laser scans along the shoreline provided a digital record of the existing conditions. Even the sequential placement of the blocks is planned in the digital space.
On the job, an operator selects a designated block for placement on the screen, then uses the excavator grapple attachment to pick it up. TMC provides real-time feedback on the block’s position, rotation and tilt as the operator navigates to the appropriate position, even underwater.
Du Preez added, “With TMC, the operators can ‘see’ where they are placing them under the water. Because they’re working in an active tidal area with most of the blocks sitting underwater, the idea was to make the process as easy as possible for the operator with highly visual markers on the screen. Every step is color coded, which allows operators to just focus on the colors, rather than trying to see underwater with the naked eye.”
As the block is placed within the 80 mm tolerance required to interlock with the blocks above, the operator records the as-built position, and the screen shows green. The operator then releases the grapple and moves on to the next block.
When asked about efficiency, du Preez noted, “The initial program specified placing 15 blocks per day. We are currently placing between 35 to 45 blocks per day depending on site conditions. We estimate that we’re seeing about three times the productivity compared with more conventional methodology — though I’m still not sure how we would have done this without TMC. We would have had to come up with some kind of visual marker and then perform quality checks with divers. It would have been time consuming and very costly.”
Shared progress
The benefits of the digital workflows to stakeholders, according to du Preez, are many, with transparency being the overarching benefit.
Unlike a traditional contract where owner and project team are separate, in an alliance model the client is an integral part of the team. That said, while NZ Transport Agency, Waka Kotahi, et al., are involved in the everyday running of the project as part of the alliance, they also have a board. “Every time the Alliance board of directors sees our solution, they are completely blown away by what we’ve been doing and how we’re doing it,” du Preez said. They particularly like the regular drone flights that capture progress updates.
“All survey data, models and regular flight imagery are loaded and stored in Trimble Stratus for sharing so that stakeholders always see the latest project status. The entire Alliance really appreciates this level of real-time digital visibility into the project.”
Ngā Ūranga ki Pito-One is on track for completion in 2026. When complete, the Te Ara Tupua will deliver a safe, connected and resilient route, enabling more people to walk or bike, and connect with local paths in both Wellington and the Hutt Valley.
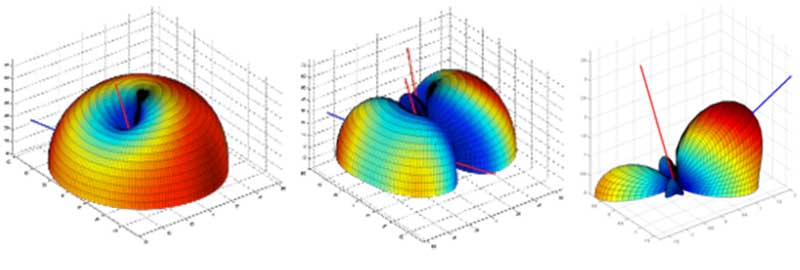
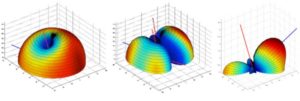
Illustrative beam patterns of a CRPA antenna in the presence of jamming (Figure: Michael Jones)
Controlled Reception Pattern Antennas (CRPAs, pronounced “serpers”) are still the single most effective counter to the threat to GNSS from jamming and spoofing — a growing problem in and near conflict areas, such as Ukraine and the Middle East. CRPAs, which make use of the fact that the desired satellite signals and the unwanted jamming signals generally arrive from different directions, reduce the effective range of jammers by up to five orders of magnitude. They are attractive because they replace existing antennas on GNSS receivers without requiring any other changes — though they are generally larger than typical GPS antennas because they contain several antenna elements and some associated electronics.
Beginning on Sept. 15, 2025, CRPAs will no longer be covered by the International Traffic in Arms Regulations (ITAR), which prohibit the sale outside of the United States of defense articles, services and technical data and impose very large penalties for violators. ITAR is managed by the Directorate of Defense Trade Controls (DDTC) in the Bureau of Political-Military Affairs at the U.S. Department of State, which announced the rule change in mid-January. It removes items that “no longer warrant inclusion” from the U.S. Munitions List (USML), which defines the “defense articles” that fall under ITAR jurisdiction. CRPAs for PNT will instead be classified as dual-use commercial items and fall under the Export Administration Regulations list managed by the Department of Commerce. The Directorate removed CRPAs for PNT from the USML because they “no longer provide a critical military advantage, with increasing commercial utilization applicable to civil GPS resiliency” and because the department “intends to facilitate civil global navigation system resiliency.”
This is a seismic shift that many in the GNSS/PNT community — including the National Space-Based Positioning, Navigation and Timing Advisory Board (PNTAB) — have been advocating for years. While U.S. manufacturers have been prohibited from exporting CRPAs, TUALCOM, a Turkish company based in Ankara, has been selling 4- and 8-element CRPAs for GNSS applications, as have some Canadian companies.
Airlines and manufacturers of autonomous vehicles will be among the early beneficiaries of this policy change, as will many safety-of-life applications. Presumably, the vast expansion in the market for CRPAs also will quickly lead to a sharp drop in their cost.
In a November 2022 presentation to the PNTAB, Brad Parkinson listed the use of CRPAs among the major techniques that can make GPS receivers “virtually immune” to jamming and spoofing, recalling that they were first tested in 1978. However, he pointed out, they had been neglected because they were perceived as too expensive and large for many applications, because of delays in implementing the L5 signal, and because ITAR prohibited beam-steering antennas with more than three elements. He argued that restrictions on GNSS CRPAs were no longer effective at preventing potential enemies of the United States from using them.
Barring a reversal from the new administration, U.S. CRPA manufacturers can now help protect GNSS worldwide from jamming and spoofing.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Waymo opens autonomous rides in LA
Photo: Waymo
Waymo has launched its fully autonomous ride-hailing service in Los Angeles, available 24/7, following a waitlist of nearly 300,000 users before its rollout. The service covers nearly 80 square miles of Los Angeles County, including Santa Monica, Hollywood Boulevard and the University of Southern California. Waymo plans to expand its coverage as it scales its operations.
A large UAV show in Quanzhou, Fujian Province, China, ended in disaster when hundreds of UAVs crashed due to GNSS jamming. The event, intended to celebrate the city’s history with 2,000 UAVs equipped with low-altitude fireworks, faced significant disruptions when a camera drone entered the area without notifying authorities, leading them to mistakenly jam the signal. This incident resulted in an estimated loss of more than 10 million yuan ($1.4 million)
ISPRA project unveils coastal habitats of Italy
Photo: ISPRA
The PNRR MER A16-A18 project, led by the Italian Institute for Environmental Protection and Research (ISPRA), has released its first preliminary data for mapping Italian coastal habitats through the WebGIS Virgeo cartographic platform. The project focuses on mapping the growth of the Posidonia oceanica and Cymodocea nodosa meadows, which are crucial for biodiversity. Using high-resolution satellite imagery, lidar sensors and autonomous unmanned vehicles, the project is creating a comprehensive database for marine coastal ecosystem management and protection.
Celestial navigation system for UAVs
Photo: Cpl. Harrison Rakhshani
Researchers at the University of South Australia have developed a celestial navigation system for UAVs. The new system combines visual observations of the stars with standard autopilot technologies. In tests of the system using a fixed-wing UAV, researchers could pinpoint its position within 2.5 miles. This technology can be deployed by UAVs in GPS-compromised or denied areas by eliminating the need for GPS.
Nearly three quarters of Earth’s surface is covered by water, yet only about a quarter of that surface has been mapped in detail using modern high-resolution technology.
Marine experts worldwide work together to chart the ocean floor, ensuring the safety of ports, harbors and navigable routes. This effort is crucial for global trade, as more than 90% of goods are transported by ships. Ocean floor surveying also supports the installation of offshore infrastructure such as fiber optic cables, pipelines, drilling platforms and wind turbines.
The increasing population in coastal regions and rising sea levels due to climate change have heightened the importance of observing coastal transformations, erosion and other marine alterations. These factors are essential for understanding and protecting coastal ecosystems.
Mapping techniques
In deep waters, massive multi-beam echo sounders (MBES) operating at very low frequencies collect depth data. As water depth decreases, smaller devices with higher frequencies and resolution must be used. However, near the shore, these devices become less efficient due to the slope of the shelf interfering with sound signals.
In near-shore scenarios, collecting depth data is best done using airborne lidar sensors, which offer several advantages over sensors on surface vessels. One advantage of airborne sensors is that they can simultaneously map both the seafloor and the adjacent topography to offer seamless land-water transition data. This capability is particularly valuable in dynamic coastal environments where rapid coverage of large areas is essential.
Bathymetric lidar is specifically designed for mapping shallow coastal waters, typically effective up to depths of 50 m. It can provide high-resolution data, often achieving sub-meter positional accuracy, which is crucial for detailed coastal mapping. By combining MBES for deeper waters with lidar for near-shore areas, researchers and surveyors can create comprehensive and accurate maps of the entire coastal zone. This method offers an in-depth understanding of underwater topography, aiding various applications in marine science, coastal management and navigation.
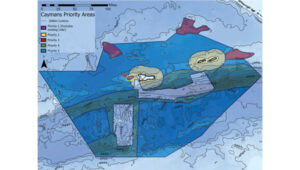
The waters of the Cayman Islands are abundant in marine life, featuring coral reefs, seagrass beds and a variety of fish species. A high-resolution map of the seafloor is essential to begin exploring, identifying, characterizing, exploiting, conserving and managing ocean resources. Saildrone has begun a mission to map 29,300 square nautical miles (100,490 sq km) of the Cayman Islands’ Exclusive Economic Zone (EEZ). This mission uses autonomous technology to survey 80% of this EEZ.
The Cayman Islands EEZ, extending up to 200 nautical miles from shore, encompasses an area nearly half the size of Florida — and 380 times greater than the island itself. The mission will provide detailed and precise bathymetric data for this area, contributing to a comprehensive understanding of the seafloor topography in the region. The data collected seeks to enhance maritime navigation and support scientific research, environmental conservation efforts and marine resource management in the Cayman Islands.
“Our waters hold such great value to us for a myriad of reasons, ranging from recreational to economic. Conducting this assessment will allow our government to make data-driven decisions that will strengthen our policies and legislation as it relates to our maritime infrastructure,” said Juliana O’Connor-Connolly, premier and minister for District Administration and Lands.
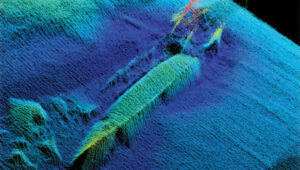
The Saildrone Surveyor USV is a purpose-built platform for autonomous deep-water ocean mapping. (Photo: Saildrone)
The mission is philanthropically funded by the London and Amsterdam Trust Company Limited, a Cayman-based organization. Saildrone is tasked with collecting the raw bathymetry data, which will be provided to the UK Hydrographic Office to process and update the Cayman Islands’ nautical charts. The data will belong to the government of the Cayman Islands.
Autonomous seafloor exploration
The mission is being conducted using a 20-m Saildrone Surveyor uncrewed surface vehicle (USV) equipped with MBES and metocean sensors for ocean mapping and ecosystem monitoring, as well as radar, cameras and advanced machine learning. Metocean stands for meteorology and physical oceanography. Globally, only 26% of the ocean has been mapped, a result of the lack of survey ship capacity. While a survey ship takes years to build, Saildrone can produce one Surveyor in as little as six weeks.
This nautical chart shows the Cayman priority mapping areas. The yellow oval indicates the vessel’s location as of Dec. 9, 2024. (Photo: Saildrone)
Saildrone USVs have demonstrated a reduction of more than 97% in operational carbon emissions when compared to survey ships to accomplish the same task. Additionally, they lower the risk to personnel. This information is highlighted in Saildrone’s Carbon Impact Report, which provides a comprehensive evaluation of the carbon emissions associated with maritime data collection and the emissions mitigated by using Saildrone’s USVs.
Saildrone’s ocean mapping solutions support storm surge modeling efforts and emergency response, as well as coastal resiliency and hazard studies, resource management, restoration projects, habitat mapping and infrastructure for renewable energy generation. USVs equipped with deep ocean mapping sonars now serve as a reliable option for data collection in large areas such as EEZs.
Bathymetry is crucial to understanding Earth’s aquatic environments. Its importance has evolved significantly since the early days of navigation, when mariners relied on lead lines and poles to gauge water depths. The field of bathymetry continues to advance with emerging trends that enhance data collection capabilities. Autonomous platforms such as USVs and autonomous underwater vehicles are increasingly utilized for bathymetric surveys, allowing for more extensive and detailed mapping. Additionally, as the industry grapples with challenges such as workforce shortages and the need for more efficient data collection methods, autonomous systems are proving to be a valuable solution.
Trimble’s Applanix POSPac MMS, an advanced GNSS-inertial post-processing software, seamlessly integrates with the Applanix POS MV and multibeam or sonar sensors to deliver high-accuracy results. (Photo: Trimble)
“Autonomous and uncrewed platforms have become a real force multiplier, and the trend continues,” said Peter Stewart, director of marine products at Trimble Applanix. “Companies such as XOcean and Saildrone are showing what is possible, leveraging cloud processing and enabling data collection in remote areas while maintaining a work-life balance for their staff. Since finding qualified engineers and surveyors to fill these roles offshore is an industry-wide concern, more flexible working conditions are needed to hire and retain talent.”
Another emerging trend is the development of sensors capable of penetrating murky waters, which can significantly enhance surveyors’ ability to gather data in challenging environments. Advanced sonar systems, innovative light-and-sound combinations and newly developed sensors allow research teams to collect detailed data. Post-processing technology for bathymetry has also significantly advanced, making data acquisition, processing and presentation more efficient and accessible. This allows researchers to map and study underwater terrains that were previously inaccessible or poorly understood.
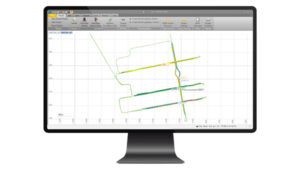
Typical marine vessel data processed in POSPac MMS PP-RTX mode. (Photo: Trimble)
“Ease of use and installation are key trends toward ensuring valuable hydrographic data can be acquired, processed and presented efficiently,” Stewart said. Trimble works with users and third parties to offer an optimal workflow, making technology and the data it creates more accessible and operations more efficient, he added.
The IN-Fusion+ PP-RTX2 processing mode in Trimble’s POSPac MMS software is designed to improve post-processed GNSS-inertial trajectory generation. This mode uses Trimble’s CenterPoint RTX technology to deliver centimeter-level positioning accuracy without the need for local base stations. Stewart shared how this technology can be particularly useful when surveying around offshore windfarms, where shore-based RTK infrastructure is often too distant to be useable.
I am very pleased to announce that professor Washington Yotto Ochieng has agreed to join our Editorial Advisory Board.
He is the current head of the department of civil and environmental engineering and chair professor in positioning and navigation systems at Imperial College London, where he has been on the faculty since 1997. He is also the interim director of the college’s Institute for Security Science and Technology. Among his several other current roles, he is the president of the Royal Institute of Navigation, formed in 1947 following the example of the U.S. Institute of Navigation; a member of the board of trustees of the Science Museum Group appointed by the UK prime minister; and chair of the advisory board of the Science Museum in London.
For a much longer bio of Ochieng, including his full list of titles and honors, visit here.
GPS World featured Ochieng in its May 2009 issue, in a special section on “GNSS Leaders to Watch.” We wrote that he was “excited by the potential benefits of the new signals from modernized and new signals, and their integration with novel terrestrial systems/sensors.”
He has proposed the following question for EAB discussion:
When we discuss the security of GNSS/PNT systems, we nearly always focus on interference — i.e., meaconing, intrusion, jamming or spoofing. However, GNSS/PNT systems are embedded in systems of systems that also offer many other opportunities for cyberattacks. What should we do about it? We will publish responses from other EAB members in the next issue.
Finally, our heartfelt thanks to Terry Moore and Jean-Marie Sleewaegen, who resigned from the EAB, for their many contributions over the years, and a special thanks to Jules McNeff, who has served on the EAB since the magazine’s inception 35 years ago!