In February 1991, two Russians joined this magazine’s Editorial Advisory Board: Nocolay Ivanov, Ph.D., research and development director of the USSR’s Institute for Space Device Engineering, and Gennady Gromov, Ph.D., chief designer general for the Leningrad-based All-Union Scientific Research Institute for Radio Equipment. Both were leading experts in GLONASS.
In October 1982, 4 1/2 years after the launch of the first GPS satellite, the Soviet Union had launched the first test satellite for its new constellation. It peaked in 1996, with more than two dozen operating satellites in orbit, then declined, hitting a nadir of just seven operational satellites in 2001.
Additionally, early GLONASS satellites were plagued by orbital failures and short lifetimes. Many observers wrote the system off as another victim of the economic and political disarray following the collapse of the Soviet Union. Then, the new Russian government reversed the trend by substantially increasing its funding for the program. By October 2011, the full orbital constellation of 24 satellites was restored. Next year, Russia plans to launch Glonass K-2, the latest generation of GLONASS satellites.
Following Russia’s invasion of Ukraine, however, much international scientific and technical cooperation with the country has been on hold. On April 8, 2022, the European Commission declared: “Following the Russian invasion against Ukraine and in solidarity with the people of Ukraine, the Commission has decided to suspend the cooperation with Russian entities in research, science and innovation.” Two months later, on June 11, 2022, the White House followed suit: “Consistent with U.S. domestic and international law, we will wind down institutional, administrative, funding, and personnel relationships and research collaborations in the fields of science and technology with Russian government-affiliated research institutions.”
By contrast, cooperation between the U.S. and European space agencies continues apace, as evidenced by a recent successful test of the interoperability of GPS and Galileo receivers.
Meanwhile, in 2024, China reached a total of 45 operational BeiDou satellites in orbit. It is also conducting research on BDS technology upgrades and technological trials for integration with low-Earth orbit PNT systems. It touts this, together with its active participation in the work of relevant United Nations bodies, as enhancing international collaboration.
At the latest two-day meeting of the National Space-Based Positioning, Navigation and Timing Advisory Board, in early December, much of the agenda was devoted to updates on international GNSS capabilities — including Japan’s QZSS and Korea’s KPS — and discussion of how GPS compares with the other global and regional navigation satellite system constellations.
Future GPS policies and budgets will depend largely on the choices made by the next U.S. administration.
War, international collaboration and the periodic changes in national perspectives and priorities brought about by elections contribute as much as scientific and technical research to the prospects of GNSS — this fantastic global utility that enables us, among other things, to track the movement of containers from Shanghai to Los Angeles, fly safely from New York to Paris and coordinate universal time across our planet.
Saying the government must focus on “delivering an operational resilient positioning, navigation and timing (PNT) system for the United Kingdom as soon as we can,” the British Science Minister, Lord Patrick Vallance, announced several initiatives in his opening remarks to the Royal Institute of Navigation’s UK PNT Leadership Seminar on Nov. 20, 2024.
Among them was a funding increase for the National Physical Laboratory’s National Time Centre (NTC) project from £30 million ($38 million) to £62.7 million ($79 million) and a plan to have NTC and the first of the nation’s new eLoran towers at initial operating capability (IOC) by January of 2027.
Plans for all efforts beyond next year were necessarily “subject to spending review.”
Still, seminar attendees were gratified to hear the minister’s endorsement of the 10-point PNT policy framework published by the previous administration in 2023 and his commitment to operationalizing it with implemented systems.
Shabana Haque, Ph.D., head of the United Kingdom’s National PNT Office, also addressed the seminar and elaborated on the government’s actions to date and plans moving forward. She also discussed efforts toward developing quantum technologies and how all the capabilities would be incorporated into a coherent architecture.
Photo: RNT Foundation
Clocks
The United Kingdom recognizes time and timing as the most fundamental component of the PNT utility. Its NTC R&D program, run by the National Physical Laboratory (NPL), has been up and running since 2019. Its primary objective is to create “…a resilient UK national time infrastructure through the building and linking of a new atomic clock network distributed geographically in secure locations.”
Five years later, that program is coming to an end. Plans are in the works for the next phase of the NTC program, which includes developing a national timing infrastructure and supporting a new timing ecosystem — one that includes two-way satellite-time transfer (TWSTT), eLoran and the country’s legacy MSF radio time service. The industry will have a valuable role in the architecture of time distribution and providing value-added services while accessing highly resilient and well-authenticated core government time infrastructure.
As a result of NTC work to date, traceable time and frequency signals can now be accessed by industry and academia from three NPL nodes dispersed across the United Kingdom. They are at the University of Strathclyde in Scotland, the University of Cranfield in the Midlands and the University of Surrey in the south.
eLoran
eLoran also features prominently in the United Kingdom’s PNT plans. Britain operated Loran-C as part of the Northern European network until the end of 2015. For the last year of that, differential stations were deployed along the United Kingdom’s eastern coast and maritime operations based on eLoran were authorized.
On Jan. 1, 2015, and despite British pleas to the contrary, other northern European nations terminated Loran broadcasts in favor of Galileo. The United Kingdom has continued to operate its single eLoran transmitter as a national time signal. Plans call for additional transmitters to enable eLoran navigation across the nation and its adjacent waters within the next two years.
UrsaNav Loran monitor on Nautel equipment. (Photo: RNT Foundation)
The UK government has been working with several partners to advance its understanding and plan for the implementation of an eLoran capability. Haque highlighted work with the European Space Agency’s NAVISP program, resulting in the British company Roke developing an eLoran antenna for handheld devices.
She also discussed integrating the NTC’s clock and fiber network with eLoran signals and developing GNSS/eLoran receivers.
Many were particularly interested in an “eLoran Effectiveness Report” that the government commissioned and received from the General Lighthouse Authority’s Research and Development (GRAD) team. GRAD has extensive experience with the technology, having operated and evaluated the differential eLoran system along Great Britain’s east coast.
In a related move that helped signal the United Kingdom’s commitment to the technology, the Ministry of Defence issued a Request for Information (RFI) in September 2024 about a deployable eLoran capability. The RFI indicated that the document was a prelude to an acquisition.
Quantum research
The United Kingdom has invested more than £1 billion ($1.3 billion) into quantum research, which has the potential to contribute to PNT with better timekeeping and inertial and gravimetric sensing.
One aim of the quantum research program is to develop “…new navigation and timing systems to provide resilience and improved accuracy in the event of the denial of satellite systems.” A specific goal is to deploy quantum navigation systems, including clocks, on aircraft by 2030.
The program began in 2014 and has seen a significant increase in 2024 with the establishment of five quantum hubs nationwide. The hub at the University of Glasgow focuses on resilient PNT systems for national security and critical national infrastructure.
Policy and coordination
Minister Vallance and Haque also discussed two important non-technology themes.
The first was that the United Kingdom’s PNT office is fully funded, staffed, and very active. It was created last year as a cross-government effort and includes representation from the Ministry of Defence. In addition to pushing the nation’s PNT efforts forward, the office has been engaged with numerous other governments, including those of the United States, Canada, Australia, New Zealand, Europe, Japan and Korea.
USCG Loran tower circa 1995. (Photo: RNT Foundation)
Second, while the PNT initiatives are necessary for the nation’s resilience and security they will also be a source of economic benefits. This goes beyond enabling the British economy to function during local and potentially widespread GNSS disruption events. As the nation develops the technology stack to support its own resilient PNT architecture, along with enabling and supporting policies, resilient PNT devices and services will become marketable to others.
A sovereign PNT capability that can both stand on its own and cooperate with GNSS is becoming increasingly attractive to many nations. Being able to source such a capability from a respected and trusted ally such as Great Britain could make acquiring and implementing such a system much easier for many.
The UK Science Minister also praised the RIN’s work and publication of a series of tools to help explain PNT and the need for resilience to those outside the community. The tools also will help organizations evaluate their readiness for GNSS disruptions.
Available from the RIN’s Resilient PNT Portal, they are
A PNT explainer that outlines risks from over-dependence on GNSS and provides links to other informative resources.
A best practices “placemat” describing a “Prepare, Act, Recover” framework for PNT disruptions.
A PNT resilience checklist for organizations to use to self-evaluate their risk from GNSS disruptions.
The RIN recommends PNT experts use these tools working with customers, suppliers, and partners and act as a “guiding hand.”
The RIN sees these all as a “phase 1 release.” Feedback on the tools is encouraged and should be sent to [email protected]. The RIN team is eager to know what works and what could be improved, as well as to receive suggestions for other efforts.
As a “learned society,” the RIN has a significant influence on government policy and direction. This was recognized by Lord Vallance, saying, “The Royal Institute has played a really important role in recent years to highlight the PNT opportunity and risk, to provide expertise, and to work with government on solutions.”
The RIN’s director, John Pottle, and RIN Fellows Ramsey Faragher, Guy Buesnel and Andy Proctor were all recognized during the seminar for their contributions to the organization’s resilient PNT efforts.
UK leading the west
While China is in the final stages of establishing a nationwide clock system integrated with eLoran and signals from space, and South Korea is following suit, the United Kingdom seems to be the only Western nation in the process of establishing a coherent and resilient national PNT systems-of-systems architecture.
Some nations have substantial fiber timing networks, Europe seems to be on the path to a timing backbone, and the United States has three eLoran transmitters on air. However, none have announced the type of integrated plans the UK has published.
When asked about this, one UK PNT technology and policy expert opined that his nation is so far ahead of Europe and the United States because “we are unencumbered by having our own GNSS.”
His idea is that GNSS involves a lot of time, effort and money. The kind of financial and emotional commitments needed for these huge projects makes it hard for many to come to grips with the limitations and vulnerabilities of GNSS and the need to implement complementary systems. Both government officials and GNSS industry lobbyists may tend to resist such efforts, he said.
Concerning the UK government’s investment in OneNav, he said it is still possible that the United Kingdom might also pursue a space-based capability. Rather than establishing the capability on its own, in his opinion, the government will be much more likely to look for a commercial subscription service.
“We will access GNSS when we can trust it, and may pay for other signals from space,” he said. “But we want a sovereign capability for the United Kingdom, and the future of resilient PNT is terrestrial.”
At sunrise on Oct. 1, 2024, SL-15 launched into a perfectly clear blue sky over the desert from Spaceport America, in Las Cruces, New Mexico. The flight — conducted by UP Aerospace with support from NASA’s Flight Opportunities program — carried aloft the payloads and hopes of researchers from three countries — Italy, Germany and the United States — and ten organizations.
Spaceport America, the first commercial spaceport in the world, is an FAA-licensed launch complex. Situated on 18,000 acres adjacent to the U.S. Army White Sands Missile Range in southern New Mexico, it has a rocket-friendly environment of 6,000 square miles of restricted airspace, low population density, a 12,000 ft by 200 ft runway, vertical launch complexes and about 340 days of sunshine and low humidity.
UP Aerospace, a Denver-based company created in 1998, conducted its first suborbital flight from Spaceport America in 2006, which was also the inaugural flight from the spaceport. UP Aerospace maintains a launch complex, a payload processing center and a space propulsion center at the spaceport. Its launch operations and SpaceLoft suborbital launch vehicle were designed and built as a reliable, low-cost Reusable Launch Vehicle (RLV) system.
NASA’s Flight Opportunities program rapidly demonstrates technologies developed by industry, academia, as well as NASA and other government scientists through testing with various commercial flight providers. The program matures capabilities needed for NASA missions and commercial applications while strategically investing in the growth of the U.S. commercial space industry. Available flight platforms include suborbital rockets, rocket-powered landers, aircraft flying parabolic profiles to achieve reduced gravity, high-altitude balloons, and hosted orbital vehicles.
Interoperability test
One of the payloads carried to suborbital heights by the SL-15 rocket was a suite of multi-GNSS receivers from NASA’s Space Communications and Navigation (SCaN) program, the European Space Agency (ESA) / European Space Operations Centre (ESOC), the Italian Space Agency (Agenzia Spaziale Italiana or ASI), and their contractors Fraunhofer (a German, publicly owned research and development organization) and Qascom (a private Italian engineering company offering security solutions in satellite navigation and space cybersecurity). A key goal of the flight test was to determine the scope of the interoperability of these receivers. The full results of the test will be presented at the intercessional meeting of the International Committee on GNSS (ICG), a part of the United Nations Committee for the Peaceful Uses of Outer Space (COPUOS) in Vienna in June 2025.
One of the other payloads on the flight was an experiment by the New Mexico Institute of Mining and Technology — aka New Mexico Tech — on spacecraft health monitoring and real-time systems built by the company Immortal Data, which also tested out and collected environmental data on some of its own equipment as it relates to product development. Another payload was an advanced prototype Automatic Dependent Surveillance-Broadcast (ADS-B) transmitter that could potentially be used for independent, low-cost tracking of space launch vehicles.
Lisa Valencia, an electrical engineer for Overlook Systems Technologies, Inc. and NASA’s SCaN Program at NASA Headquarters, was the program manager for the SCaN payload mission. In November 2019, SL-14 tested NASA’s Autonomous Flight Termination Unit as well as Qascom’s GNSS signal recorder. Oscar Pozzobon, co-founder, president, and CEO of Qascom, was able to post-process the data collected by the recorder. SL-15 was originally planned to launch in November 2022; however, it was scrubbed due to interference between the launch vehicle’s S-band transmitter and the L-band GNSS receiver on board. In May 2023, the original SL-15 booster was used for SL-17, a mission carrying student payloads, which experienced an anomaly, ending the flight test three seconds after launch. Therefore, Valencia, her team, and the other teams involved were elated when the October 2024 launch was successful.
Building on the success of the previous SL-14 launch, the SL-15 mission to fly two GPS-Galileo receivers on a sounding rocket is the result of an agreement between NASA, ASI and ESA. The primary objective was to assess GPS-Galileo performance in a highly dynamic environment. The secondary objective was to have the GNSS receivers integrated with the avionics on board the vehicle, with the aim to test the real time use of PVT available during the flight, in contrast to post processing on SL-14. This allowed the evaluation for operational use of multi-constellation / multi-frequencies GNSS for Autonomous Flight Termination Systems (AFTS). AFTS is an independent launch vehicle subsystem designed for range safety operations. From 2014 to 2019, Valencia was the project manager for AFTS in the Engineering Directorate at NASA’s Kennedy Space Center.
The interoperability experiment on the SL-15 mission included two Autonomous Flight Termination Units (AFTU) and two GPS-Galileo receivers utilizing the L1/E1/L5/E5a signals: a GNSS Dual Frequency / Dual Constellation QN400-SPACE receiver for GPS-GALILEO Receiver for Human Exploration & Operations (GARHEO) program of ASI and Qascom, and a GNSS Receiver with Open Software Interface (GOOSE) receiver from ESA/ESOC and Fraunhofer; as well as a JAVAD GPS L1 receiver. During the flight, a 12-second launch and boost phase was followed by ascent coasting until the rocket reached apogee at an altitude of 115 km, followed by descent, re-entry, and landing, for a total flight duration of 13 minutes. The rocket reached a maximum speed of 1400 m/s, a maximum acceleration of 13.5 G, and a maximum spin rate of 7 Hz.
The NASA sponsor for the GNSS Payload mission is James J. Miller, Executive Director of the National Space-based Positioning, Navigation, and Timing (PNT) Advisory Board with the SCaN Program. The team members are:
NASA: James J. Miller, Lisa Valencia, Hubert Chang, Paul De León, Anh N. Nguyen
ASI:Giancarlo Varacalli, Claudia Facchinetti, Mario Musmeci
During this highly dynamic flight, all GNSS receivers successfully tracked, with high accuracy, based on position, velocity and time (PVT) solutions, meeting the interoperability payload objectives of dual constellation (GPS and Galileo) and dual frequency (L1/E1 and L5/E5a) compatibility.
One plot of the rocket’s altitude changes over time produced from the data collected is striking: a blue line representing the data from the GARHEO and a red one representing data from a monitoring radar on the ground overlap perfectly, resulting in a single purple line on the graph.
During a launch, space vehicles rely on GNSS signals for tracking, monitoring, and safety. Their ability to receive signals from multiple GNSS constellations would offer launch vehicles more precise and reliable real-time PVT information. The SL-15 GNSS experiment demonstrated the benefits of interoperability between Galileo and GPS in highly dynamic environments.
The next step will be a detailed analysis of the data collected during the flight. ESA/ESOC’s next steps will be to process the data from the GOOSE receiver taken on-board and to apply different concepts and algorithms in order to achieve the highest possible accuracy for the SL-15 flight trajectory. Among them will also be a Precise Point Positioning (PPP) GNSS technique that utilizes the GOOSE receiver data in combination with precise orbits and clocks for Galileo and GPS, which will be calculated by ESOC’s Precise Navigation System (EPNS) software. Results are expected in early 2025. ASI/Qascom’s next steps include utilizing the data collected by the SL15 experiment to support the development and validation of the new generation of high dynamics GNSS receivers providing enhanced robustness against GNSS threats. This is the main objective of Qascom’s receiver. At least one launch vehicle is planning to incorporate a multi-GNSS (GPS + Galileo) receiver into their AFTS.
Quotes
“The success of SL-15 is the result of a multi-year collaborative effort with the Italian Space Agency (ASI) and the European Space Agency (ESA) to develop multi-GNSS capabilities to improve resilience for space users. The multi-national SL-15 team worked extremely well together to overcome many challenges, leading to a successful mission. The successful launch of SL-15 was particularly rewarding to our international team in light of the numerous delays we had due to export control restrictions, high winds at the launch site, and key personnel catching COVID-19 during pre-launch checkout. These delays, however, gave us time to resolve payload interference issues identified during one of the launch preparations as well as have our payload reassigned from a rocket with a faulty engine that ended up failing on another mission (SL-17).”
— Lisa Valencia
“The key benefit of this mission was validating our ability to track both GPS & Galileo signals under the highly dynamic conditions of a sounding rocket launch. These included an initial acceleration to 14G (or 14 times the gravitational acceleration on Earth’s surface), a 7 Hz spin rate (seven spins every second), and a maximum speed more than 1400 m/s (3,132 mph).”
— A.J. Ora, Ph.D.
“The integration of GPS+Galileo for high-dynamic space applications will most certainly continue opening up more operational scenarios as GNSS signals become more available and resilient in the sparse and challenging space domain. The use of additional GNSS signals to augment GPS is developing rapidly and is a cornerstone of strengthening international collaboration as called for in Space Policy Directive-7 (SPD-7). NASA is therefore a proud contributor in helping to develop navigation tools that will benefit all space sector users as more knowledge is gained and adopted.”
— James Miller
“UP Aerospace appreciates the opportunity to work with NASA and the vast array of customers they serve. We have partnered in many successful launch campaigns. It can be challenging to integrate so many different payloads into one vehicle, but we are excited at the success of SL-15. Launching rockets is a risky business and sometimes anomalies can occur. The key is to learn from each launch and incorporate the lessons-learned into subsequent flights, ensuring their success.”
Notre Dame de Paris, the French capital’s cathedral, has reopened its doors five years after a devastating fire, showcasing its restored interior after extensive rebuilding work. The restoration, costing approximately €700 million ($737 million), was financed entirely by donations from around the world.
On April 15, 2019, Notre Dame tragically went up in flames, with the spire collapsing and the roof being destroyed. The following years were dedicated to rebuilding the cathedral, including the reconstruction of the spire and the restoration of stained glass and woodwork.
A crucial element in the restoration process was the point cloud data collected by Professor Andrew Tallon, an architectural historian from Vassar College, in 2010. Tallon’s project, which aimed to fully understand the Gothic structure and identify structural anomalies, involved creating a precise 3D model of Notre Dame using a Leica Geosystems terrestrial laser scanner.
This cloud of 1 billion points — with a TruView released by Leica Geosystems available to view here — proved to be indispensable for the digital recreation of the cathedral’s interior and exterior. Tallon’s laser scans were the only truly accurate as-built measurements of Notre Dame, translating point clouds into detailed representations of its buttresses, ribbed vaults, stained glass, ornate carvings and other architectural details.
Tallon, who died of cancer in November 2018, pioneered the use of laser technology to create a digital model of Notre Dame. Members of the restoration team and architectural historian Lindsay S. Cook — assistant teaching professor of architectural history at Pennsylvania State University, and a protégé of Tallon’s — said his work was critical to the cathedral’s rebuilding and refurbishing.
Tallon took some self-portraits as he mapped the cathedral. (Photo courtesy of the family of Andrew Tallon / Vassar College)
The value of point cloud data
While modern restoration efforts cannot fully replicate the artistry of centuries past, Tallon’s scans have been instrumental in reconstructing the Gothic cathedral, allowing architects to come remarkably close. Tallon’s groundbreaking work remained a vital resource for restoring the iconic cathedral to this day.
His meticulous 3D scans of Notre Dame provided architects with information crucial for the cathedral’s reconstruction, including:
Precise 3D models: Tallon’s precise 3D model of Notre Dame included intricate details of the cathedral’s architecture, such as flying buttresses, rib vaults, stained glass windows and ornate carvings. This level of detail was unmatched by any historical drawings or records, which often lacked precision.
Dimensional and formal reconstruction: Pascal Prunet, one of the architects tasked with rebuilding the cathedral, said in an interview with Lindsay S. Cook that the point cloud data provided an “exact trace” of the cathedral’s state at the time of scanning, allowing him and his team to reconstruct elements — such as the vaults — “without hesitation” regarding dimensions or forms. This was essential for accurately rebuilding complex structures such as flying buttresses and rib vaults.
Structural analysis: The scans revealed structural details that were previously unknown, aiding in understanding how the cathedral was originally constructed and how it changed over time. This information was vital for designing custom supports and ensuring structural stability during reconstruction.
Integration with modern technology: The point cloud data was integrated into Building Information Modeling (BIM) processes, which allowed architects to create a digital twin of Notre Dame.
Restoration guidance: The scans provided a highly detailed record of Notre Dame’s pre-fire condition, which helped restoration professionals select appropriate techniques for stabilizing and rebuilding various parts of the cathedral.
Tallon’s laser scans provided the only accurate as-built measurments of Notre Dame de Paris, capturing detailed representations of its architectural features. (Photo: Andrew Tallon (Vassar College / Columbia University))
Why precision matters
On Oct. 25, 2023, Philippe Villeneuve, architect in chief of historical monuments in charge of Notre Dame, and Pascal Prunet, a fellow restoration architect, delivered a Claflin Lecture at Vassar College in New York. They discussed their efforts to shore up, conserve and restore the cathedral since the devastating fire.
3D digital renderings were obtained from Tallon’s laser scans of Notre Dame Cathedral in Paris. (Photo: Andrew Tallon (Vassar College / Columbia University))
The two architects highlighted the crucial role Tallon’s laser scan of the cathedral played in their restoration process. They shared how this detailed digital model provided them with precise measurements and structural information, enabling Notre Dame to, in essence, “guide its own restoration.” By relying on this accurate data, the team could ensure its work remained faithful to the iconic cathedral’s original design and construction.
When speaking with Cook, Prunet shared, “At Notre Dame, we are doing an enormous amount of work, but we are not doing creative work; we are putting things back together again.” Villeneuve added, “What we’re doing isn’t very personal.” Tallon’s laser scan has enabled the architects to allow Notre Dame to “speak for itself,” according to Villeneuve.
Tallon had sent a copy of his point cloud to Villeneuve’s predecessor, Benjamin Mouton, before Mouton retired in 2013. After the 2019 fire, Marie Tallon saw that the architects had access to her late husband’s work. During their 2023 lecture and in a follow-up interview, Villeneuve and Prunet said Tallon’s scan — which Prunet called an “exact trace” of the state of the building at the time it was scanned — had been used in numerous ways since the fire.
For example, it aided the design of the wooden centering custom-made to cradle each unique flying buttress and rib vault and to rebuild the damaged vaults and the sole transverse arch destroyed when the tip of the spire separated from its base and fell westward, becoming a projectile that crashed into the nave.
The point cloud data was integrated into Building Information Models (BIM) processes, which allowed architechts to create a digital twin of the cathedral. (Photo: Andrew Tallon (Vassar College / Columbia University))
“Andrew Tallon’s point cloud, well, it’s a bit like listening to a Mahler symphony,” said Prunet, alluding to the scan’s scale and complexity. Prunet continued, “It’s a recording,” but one that “needs to be decrypted.”
Tallon’s laser scan of Notre Dame has proven invaluable in the restoration process. This digital twin, created in 2015, offers unparalleled precision and detail, capturing the cathedral’s every nuance with accuracy up to 5 mm. This level of detail allowed the restoration team to address the structure’s complexities and make informed decisions about the rebuilding process, ultimately helping to preserve Notre Dame’s authenticity and historical integrity.
As we approach the holidays and if I get tired of writing about weighty scientific, technical and policy issues, I might apply for a copywriting position at Hallmark Cards. But for now we begin to think concretely about the coming year. In fact, due to our production timelines, as you are reading this issue we are busy completing the January one. So, what can you expect to see in these pages in 2025?
First, more of the same… excellent content. Our cover stories will continue to bring you case studies from key GNSS application areas based on interviews with equipment manufacturers and end users. Our secondary features will cover bathymetric surveying; GNSS/PNT applications for consumers, science and business; autonomous vehicles; and indoor mapping. Our System of Systems section will continue to keep you informed about developments in GNSS, other PNT, and space exploration around the world. Our guest columnists — including Lisa Dyer of the GPS Innovation Alliance and Dana Goward of the Resilient Navigation and Timing Foundation — will continue to bring you their valuable perspectives. Our annual Directions section will continue to provide updates on all four GNSS and the regional constellations.
Launchpad will continue to showcase the latest product releases and Market Watch will continue to bring you a roundup of timely industry news. Our buyers guides will continue to provide a handy reference to who makes what. Our Mapping Marvel, Research Roundup and Seen & Heard sections will continue to bring you beautiful and interesting maps, summaries of scholarly articles, and glimpses of interesting and amusing GNSS/PNT applications around the world, respectively.
Our Authoritative Reference section will feature an article on the GPS budget, an update to “Who Runs GPS?” (see the February 2023 issue), an almanac of GNSS satellites and signals, and a survey of augmentation and corrections services. Our Inside the Box occasional section will explain the workings of different aspects of GNSS/PNT technology.
Following Richard Langley’s fantastic 35-year run with his great Innovation column — if you missed it, see his last one, and a celebration of his work, in the November issue — the February issue will launch a new quarterly technical column and its editor (and, sometimes, author). Many of you will start guessing who this person is and the new column’s name… but my lips are sealed until then.
I will engage our Editorial Advisory Board in more in-depth discussions of technical and policy issues and ask some of its members to write full articles. I will expand our coverage of low-Earth orbit (LEO) PNT and corrections services and introduce new content categories — such as legal issues, the consumer market and book reviews.
I am looking for new authors, including a Washington correspondent, to report on relevant budget negotiations, legislation and policy discussions; a surveyor to report from the field about new equipment, techniques and challenges; a technology writer to cover the growth in LEO PNT constellations and other types of complementary PNT and one to cover developments in the consumer market.
SpacePNT and European Engineering and Consultancy (EECL) delivered the final presentation of the European Space Agency (ESA)-funded project, “Earth Moon GNSS Spaceborne Receiver for In-Orbit Demonstration.” This project aims to develop the NaviMoon GNSS receiver for lunar applications. (Photo: SpacePNT)
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focused on lunar and space applications. The papers are available here.
Clock and Orbit Determination for LEO Satellites
More than 50 years after the Apollo program, there is a growing interest in establishing a sustainable human presence on the moon, with various missions being planned in different lunar orbit regimes to support lunar exploration. To address the challenges of navigation in the lunar environment, researchers have proposed a technique leveraging time-differenced carrier-phase (TDCP) measurements from GPS satellites, which offer millimeter-level accuracy when integer ambiguities are correctly fixed.
The proposed framework utilizes an extended Kalman filter that combines intermittently available terrestrial GPS TDCP values with gravitational accelerations predicted by an orbital filter. To handle the unique challenges of the lunar environment, such as weak gravity and strong third-body perturbations, the researchers implement an adaptive state noise compensation algorithm and introduce an augmented state vector to address time correlations across TDCP measurements. Through Monte Carlo simulations of lunar satellites in various orbits, the technique demonstrates improved positioning and onboard timing accuracy compared to pseudorange-only navigation solutions.
Keidai Iiyama, Sriramya Bhamidipati and Grace Gao, “Precise Positioning and Timekeeping in a Lunar Orbit via Terrestrial GPS Time-Differenced Carrier-Phase Measurements.”
Satellite Ephemeris Parameterization for Lunar Navigation
This paper explores the development of satellite ephemeris parameterization methods for lunar navigation systems. As space agencies plan to establish satellite networks around the moon for communication and positioning, navigation and timing (PNT) services, the authors investigate optimal techniques for efficiently and accurately broadcasting satellite ephemeris data to lunar users. They propose a framework that directly approximates satellite position and velocity in the inertial frame, using signal-in-space-error requirements as constraints to guide the search for the best ephemeris parameter set.
The study evaluates different methods based on ephemeris prediction precision, fit interval and message size. It demonstrates the framework’s ability to approximate satellite ephemeris for both low lunar orbits and elliptical lunar frozen orbits while meeting signal-in-space-error requirements. The research considers polynomial and Chebyshev basis types for surrogate models and evaluates performance based on precision and orbital coverage. By quantifying the broadcast message’s fit interval and size, the authors aim to guide the selection of optimal parameterization methodologies for lunar navigation systems.
Marta Cortinovis, Keidai Iiyama and Grace Gao, “Open Access Satellite Ephemeris Parameterization Methods to Support Lunar Positioning, Navigation, and Timing Services.”
Improving Navigation Accuracy in GEO
The authors introduce a new approach to improving the accuracy of satellite position determination in geostationary equatorial orbit (GEO). They propose integrating a regional navigation satellite system (RNSS) with GNSS. Specifically, they suggest using RNSS signals, such as those from the Quasi-Zenith Satellite System (QZSS), to complement the signals provided by GNSS for GEO satellites.
The research addresses the challenges faced by GEO satellites in using GNSS signals, including poor dilution of precision (DOP) and significant radial errors due to limited observability. By incorporating RNSS signals, the researchers aim to improve the diversity of signal directions and enhance navigation precision. The paper demonstrates the feasibility of receiving QZSS signals across a substantial range in GEO through link budget analyses. Two comprehensive simulations were conducted: a point solution and an extended Kalman filter-based orbit determination. The results confirm the anticipated improvement in navigation precision indicated by the DOP analysis.
While RNSS signals can be received from any longitude in GEO, enhanced navigation precision depends on the distance between the satellite and the RNSS. The authors suggest that this concept can be adapted to various longitudes within GEO by selecting appropriate RNSS options and promoting stable, high-precision navigation.
Yu Nakajima and Toru Yamamoto, “Enhancing Navigation Accuracy in a Geostationary Orbit by Utilizing a Regional Navigation Satellite System.”
Integrating Orbit and Attitude Precision for CubeSat Positioning
This research paper addresses ways to enhance CubeSat capabilities for demanding missions, particularly in low Earth orbiting positioning, navigation and timing (LEO-PNT) systems. The authors propose an array-aided combined precise orbit and attitude determination model that offers an optimal solution to improve orbital accuracy and provide reliable attitude information. By utilizing multi- and affine-constrained models for precise attitude determination and reconstructing highly precise observations for an antenna array, the method addresses the challenges of higher orbital accuracy and reliable attitude information required for advanced applications.
The authors recorded significant improvements in orbital accuracy and attitude determination. Validation results show that reconstructed observations outperform original ones, leading to improved orbital components with a three-dimensional root mean square (RMS) of 4.1 cm. Additionally, observation residuals are smoother, with an RMS of 6 mm, half of that obtained via a single antenna. The results show a promising solution for enhancing CubeSat capabilities, particularly for applications requiring high-precision orbit and attitude information.
Amir Allahvirdi-Zadeh and Ahmed El-Mowafy, “Array-Aided Precise Orbit and Attitude Determination of CubeSats using GNSS.”
In 2024, we witnessed emerging trends, challenges and opportunities that significantly impacted the GNSS/PNT industry, ranging from advancements in surveying technology to ways to combat the increasing threats of jamming and spoofing. In this year in review, we highlight notable stories from 2024.
This article discussed advancements in bathymetric surveying techniques, highlighting three projects — from SBG Systems, CHC Navigation (CHCNAV) and Advanced Navigation — that are charting underwater environments. It showcased the exploration of the Great Blue Hole in Belize using submarine-mounted sonar, creating a digital twin flood model for China’s Yellow River using unmanned surface vehicles (USVs) and UAVs and the development of an autonomous vessel for surveying wet gaps in military operations.
February
Aligning the trades: GNSS for architecture, engineering and construction
Surveying is an ongoing process on construction sites. Surveyors are the first on the site before any other work begins and the last ones there to map the project “as built.” Total stations with GNSS receivers, tablets and other mobile digital devices are their essential tools, increasingly complemented by UAVs and lidar scanners. In this story on architecture, engineering and construction (AEC), we highlighted three building projects — from ComNav Technology, CHCNAV and Eos Positioning Systems — as well as photos from Juniper Systems.
Photo: Safran Federal Systems
March
2024 GPS World simulator buyers guide
In our 13th annual Simulator Buyers Guide, we featured simulator tools, devices and software from nine prominent companies that aid GNSS receiver manufacturers in product design.
April
L5-first for improved resilience in mass market GNSS
Paul McBurney, co-founder and CEO of oneNav, emphasized the advantages of L5-first GNSS receivers in enhancing resilience against GNSS interference and jamming in mass market applications. He shared how traditional receivers prioritize L1 signals, limiting their effectiveness in high-interference environments, while L5 signals, which have a higher chipping rate and power, can improve jamming resistance by up to 15 dB. The article advocated for the development of L5-first systems to boost GNSS resilience, particularly for critical infrastructure, although challenges such as acquisition complexity and cost must be addressed before widespread adoption.
May
(Photo: CAST Navigation)
Combating jamming and spoofing: PNT on the battlefield
Jamming and spoofing continue to be the key challenges to military use of GNSS. While the production and adoption of M-Code receivers is delayed, defense contractors are developing several approaches to identify, locate and neutralize these threats — including CRPA antennas, embedded GPS inertial (EGI) navigators, software-defined radios and cryptography. In this cover story, executives from seven companies presented their perspectives on the GNSS/PNT challenges faced by U.S. and allied military forces, their market niche in this area and their latest products.
June
NextNav petitions FCC for new spectrum band
NextNav’s petition to the FCC seeks to reconfigure the 902-928 MHz band for a new terrestrial positioning, navigation and timing (TPNT) service. This service aims to complement GPS, enhancing location reliability in urban areas. The integration with 5G technology could further improve positioning services. However, the petition has raised significant concerns within the GNSS industry. Industry leaders argue that granting NextNav access to this spectrum could disrupt existing technologies that rely on the same band. The proposed higher power levels could lead to interference, jeopardizing the operational reliability of various sectors, including supply chains and healthcare. The Federal Communications Commission (FCC) has received more than 1,700 comments highlighting concerns about harmful interference and calling for careful evaluation before any regulatory changes are made. The outcome of this petition could significantly influence the future landscape of positioning technologies in the United States, affecting both GNSS capabilities and the viability of critical applications that depend on current spectrum usage.
July
PNT without GNSS
For the fourth year in a row, the topic for our July cover story was complementary positioning, navigation and timing (PNT). The ongoing challenges of combating jamming and spoofing, as well as enhancing resilience in PNT systems, have been prominent themes in our articles and industry throughout 2024. The U.S. National Space-Based Positioning, Navigation and Timing Advisory Board has been actively working on strategies to “protect, toughen and augment” GPS. The term “augment” refers to enhancements made to GPS and the integration of complementary PNT sources that can partially or fully replace GPS. For this cover story, Editor-in-Chief Matteo Luccio interviewed executives from four companies that design, produce and operate various complementary PNT technologies, highlighting their diverse approaches to this challenge.
Genesis satellite.
August
Innovation: ESA’s Multi-Modal space mission to improve geodetic applications
The European Space Agency (ESA) has established the Genesis mission, a groundbreaking space project that will collocate four space-based geodetic techniques — GNSS, VLBI, SLR and DORIS — on a single satellite for the first time. This mission aims to improve the accuracy and stability of the International Terrestrial Reference Frame (ITRF) to 1 millimeter with long-term stability of 0.1 mm per year, which is crucial for detecting small variations in Earth’s solid, fluid and gaseous components. The Genesis satellite, set to launch in 2028, will orbit at an altitude of about 6,000 km with an inclination of 95° and will operate for at least two years. Members of the Genesis mission team shared how it has the potential to significantly impact various GNSS and Earth observation applications by improving geodetic and geophysical observations, as well as enhancing precise navigation and positioning capabilities.
(Photo courtesy of ION)
September
ION GNSS+ 2024
ION GNSS+ 2024, held Sept. 16-20 at the Hilton Baltimore Inner Harbor, showcased more than 400 technical presentations spanning six sectors. GPS World had the opportunity to engage in a series of discussions and panels, including a plenary session with a presentation on a space project and one on circumnavigating the globe in a sailboat using only paper charts, a compass and a sextant to navigate.
INTERGEO 2024
The GPS World team touched down in Stuttgart, Germany, for INTERGEO 2024, held from Sept. 24-26. This year’s expo and conference showcased solutions to address critical global issues such as GNSS jamming and spoofing. GPS World Publisher Brian Kanaba and Account Manager Tim Carolin made their debut at the show, joining show veteran Editor-in-Chief Matteo Luccio. The show attracted more than 17,000 visitors from 121 countries and featured 579 exhibitors.
October
Lidar helps unlock secrets in Amelia Earhart mystery
The October edition of “Mapping Marvel” focused on research conducted for The Discovery Channel’s documentary, “Finding Amelia.” This film explores the latest expedition aimed at uncovering the mysterious fate of Amelia Earhart. It featured contributions from SPH Engineering and investigated the theory that Earhart and her navigator, Fred Noonan, may have crashed in Papua New Guinea during their 1937 attempt to circumnavigate the globe.
The team utilized lidar technology to conduct low-altitude flights that produced detailed maps of the ground beneath the dense jungle. This approach revealed potential hidden features, including Japanese troop trails and a structure resembling Earhart’s Lockheed Electra.
November
Richard Langley
The last one: A look back at 35 years of ‘Innovation’
The November 2024 issue of GPS World featured Professor Richard Langley’s 300th and final “Innovation” column. His first one appeared in the January/February 1990 issue, the magazine’s very first. In celebration of Richard’s decades-long contribution to GPS / GNSS / PNT, we published a selection of testimonials and photos from some of his colleagues and friends, gathered by his former students Sunil Bisnath and Attila Komjathy.
December
Directions 2024: GNSS constellation updates
This year’s “Directions” feature offers updates on all four GNSS constellations and a regional one. Representatives from each program — BeiDou, GPS, Galileo, GLONASS and QZSS — reflect on the year’s developments, sharing how PNT technologies aim to enhance both defense and civilian applications, ultimately improving navigation capabilities worldwide. The feature highlights significant milestones, including the modernization efforts within each constellation.
Transportation continues to be a key application area for GNSS and related technologies — both directly, as with receivers on trains, and indirectly, as in airport construction. For this month’s cover story, I chose three transportation-related projects that showcase different aspects of this relationship:
The project to triple the size of the international airport in Lima, Peru, and transform it into the Jorge Chávez Airport City. I posed a few questions to Carlos Ruiz Miranda, chief surveyor at the Lima airport project with SACYR, a Madrid-based global concessions, engineering and infrastructure and services company that specializes in large-scale infrastructure projects.
A train safety project in Vélizy, France. I talked with Joel Korsakissok, president of Syntony GNSS, a French company, which partnered for this project with Hitachi Rail, a global company headquartered in London.
A navigation test on San Francisco’s Market Street using an INS-GNSS integration from ANELLO Photonics, which specializes in silicon photonics and sensory technology. I spoke to Kirstin Schauble, Ph.D., director of systems engineering.
Trimble: Peru builds South America’s first airport city
A construction worker at Lima’s airport uses a Trimble GNSS receiver and a TSC7 controller. Requirements included precisely positioning the bolts for more than 700 seismic isolators. (Photo: Trimble)
On April 3, 2023, the first commercial plane took off from a new 2.2 mile-long runway at the Jorge Chávez International Airport, in Lima, Peru, headed for Tarapoto with 140 passengers. That same day, a Peruvian Air Force jet was the first aircraft to land on the runway. Both aircraft were monitored from a new 213 ft.-high control tower with a 360° view of the airport.
The new infrastructure is part of a larger $2 billion project to triple the size of the airport, turning it into Jorge Chávez Airport City. Additionally, third-party investment for the construction will exceed $400 million in the first phase. The continent’s first such venture, it will enable Peru to become one of its principal aviation hubs. Spanning 2,310 acres, in addition to the new runway and control tower, it includes a 67-acre passenger terminal designed to handle about 40 million passengers a year.
Construction began in January 2022, and the expanded airport is scheduled to open in January 2025. It is a joint project of Lima Airport Partners — which operates more than 30 airports around the world — the Peruvian Ministry of Transportation and Communications, the Peruvian Airports and Commercial Aviation Corporation, and the aviation community in general, under the supervision of Ositran.
The modernization project’s scope and scale are matched by the means and methods used to build it. They include advanced surveying, grade control and coordination techniques in the field and about 2,700 active building information models (BIM) containing more than 50 miles of utilities that multiple contractors will construct. To fully synchronize the digital workflow between the field and the office, Ruiz led the transition from cloud-based collaboration software to a digital workflow. This improved coordination and productivity across departments and helped to keep the project on track.
The transition began by implementing a cloud-based common data environment (CDE), using Trimble Connect to provide a real-time, centralized collaboration platform for the construction crew, the field surveyors and the project’s managers. The CDE became a hub for managing data from field solutions, including laser scanners, UAVs, grade control systems, total stations, GNSS receivers and machine control systems on heavy earthmoving equipment.
A critical part of the terminal expansion is the airside airplane parking area around the terminal, which requires about 70,000 cubic meters of concrete and asphalt. The systems developed by the construction team enable the paving crew to achieve 10 mm accuracy, well below the 18 mm requirements.
Given the number of elements to this project in the terminal and surrounding areas, the SACYR survey team found that one of the best ways to facilitate the data flow between the office and the field is to use augmented reality (AR). “Initially, we tried using paper printouts to manually check for issues in the field. We tried Google Earth, but that was not satisfactory,” said Ruiz. Instead, SACYR turned to Trimble’s SiteVision AR software to provide real-time visualization of data, which improved decision-making and planning and reduced errors and costs.
Nearly 20 Trimble solutions were used in this project (see the sidebar), which helped to synchronize communication between field and office during construction, provided high accuracy results, and improved visualization and collaboration with the customer.
An aerial image shows the new terminal at Lima’s airport under construction. It will be able to handle up to 40 million passengers a year. (Photo: Trimble)
I asked Ruiz a few questions about the GNSS part of the project.
Q: What were the key challenges in surveying for this airport expansion project? Given the nature of the project and its location, multipath was probably not a problem. Also, the new runway and control tower were built away from existing air traffic, so that presumably was not a problem either.
A: The challenge has been organizing workflows between the field and the office. The location was not an issue for the project, but the limited space between the existing runway and the new one was. Nevertheless, it was not really an issue for construction.
Q: The airport will be the first one in South America to have seismic isolators to allow it to serve humanitarian flights following an earthquake. Did that pose any special challenges for surveyors?
A: Yes, it was a challenge for surveyors because there are more than 700 seismic isolators, and they each have anchor bolts that have precise tolerances to be embedded in the concrete. For this they used Trimble total stations.
Q: Did this project have any special requirements?
A: Special requirements were the precision of the seismic isolators, the precision of the plumbness of the columns and beams, and the precision of the leveling of the concrete of the parking spaces and the asphalt for the aircraft.
Q: What total stations were used?
A: A S5 1 second with TDC600, software access, a UHF 35Watt GPS data radio, and different GNSS receiver models for the project.
Q: The airport expansion is part of Lima’s new airport city. How was surveying for the former tied into the latter?
A: The benchmark control points certified by the Peruvian IGN will be left in place and become part of the LAP airport geodetic network.
Autonomous railway track detection
Redundant ssm receiver installation inside a test train in France. (Photo: Hitachi Rail and Syntony GNSS)
Around the world, efforts are underway to increase the safety of rail transportation — both for passengers and for communities along rail lines that are vulnerable to derailments that can lead to spills of harmful chemicals. The most notable recent example of the latter in the United States was the derailment of 38 cars of a freight train in East Palestine, Ohio, in February 2023, which forced the evacuation of a 1-mile radius around the spill.
Hitachi Rail and Syntony GNSS are collaborating on a train safety project in Vélizy, France. Members of the Hitachi Rail team wrote a paper1 on the project that they presented at the Institute of Navigation’s GNSS+ 2024 conference in Baltimore in September 2024. “Everybody is now trying to locate trains with the highest possible Safety Integrity Level (SIL), which is SIL 4,” said Korsakissok, discussing the project. “The partnership between Hitachi Rail and Syntony aims to reach this level by the end of 2025.”
Many modern automatic train operation (ATO) systems — an advanced technology that enables trains to run automatically without the need for a human driver — provide real-time information to the train about its location, speed and other important operational parameters. They use small radio beacons placed along the railway track, typically every third of a mile to half a mile, and an onboard antenna to collect the data. The problem with this positioning system is that it has high installation and maintenance costs. Therefore, the use of GNSS is seen as a major step toward train autonomy. However, due to local disturbances (masking and multipath), classical GNSS positioning methods can be inaccurate by up to many meters, which does not meet railway safety requirements.
The Hitachi Rail safety project in Vélizy is part of a global next-generation train positioning architecture. It supplements a stand-alone GNSS positioning solution with a satellite signal map matching technique and derived integrity methods. It uses cold start for track detection and requires neither motion nor a priori knowledge of the train’s position. The GNSS receiver used in this project is from Syntony GNSS.
A satellite signal map matching (SSM) algorithm developed for this project, in combination with accurate maps, computes the correlation between the received GNSS signal and a predicted PRN code for a chosen satellite, chosen epochs and a known georeferenced point from the map. In the absence of any errors, the user’s antenna would be expected to be located at the georeferenced point. However, this matching is never perfect, so the technique evaluates its quality based on its degree of correlation and the observed delays. It then uses several consolidation methods that take advantage of the whole set of available satellites.
“This approach is well suited to the track detection case of railway navigation when no previous knowledge of the position is given (at train cold start), as the algorithm is detecting a known position, while most of the current GNSS algorithms are estimating a position,” write the authors of the ION paper on the project, who are all members of the Hitachi Rail innovation team in Vélizy.
“The receiver embedded in the train is based on Syntony’s ORION receiver platform,” Korsakissok said. “ORION is a hardware platform that includes a system-on-chip (SoC) from Xilinx, inside which we put a GNSS software-defined radio (SDR) receiver that tracks the GPS L1/L5 and Galileo E1/E5a signals.” For Hitachi, Korsakissok continued, Syntony added a “map matching” feature to the receiver, “which is done in an original (and patented) way: All along the rail tracks, we define some ‘points of interest’ (POI) and the objective of the SSM algorithm is to detect the probability of going over one POI at a given time. Obviously, if there is only one track, and if the train goes from one station to the next, we know that it will pass over this POI, and the only question is when. Inversely, if there are two or more tracks, the most important question is on which track the train is, to avoid any collision. In this case, we define a set of POI on each track, and the key is for our SSM algorithm to tell us which one the train passed.”
The autonomous location software (ALS) used for this project runs on an industrial-grade computer approved for railway usage. Running tests are done in a lab with an antenna located both on the roof of the team’s building in Vélizy and on the train. A grid map from true line tracks is used in both cases.
“To our knowledge,” Korsakissok explained, “almost all train operators that are locating trains with GNSS for positive train control (PTC) or for the European Rail Traffic Management System (ERTMS) are solving this problem by measuring the distance between the position computed by the receiver and all present tracks, then choosing the lower one as the most probable. This can work well if the train is moving and if a hybridization algorithm is used with an inertial navigation system (INS) and odometry. However, it does not solve the so-called ‘cold start’ problem — which is that you cannot use the train’s last known position as the new starting point because it could have been moved without powering up its electronics. The SSM algorithm solves this issue, because it directly correlates each satellite signal that should be received if the receiver were exactly at the position of the targeted POI. This correlation algorithm will have a very strong peak as soon as the antenna is near the correct position. This method has been simulated and tested on real tracks and has shown very good and significant results.”
Once the project achieves SIL 4 — a milestone scheduled for late 2025 — Hitachi Rail will embed the receiver designed and manufactured by Syntony GNSS in its future lines and trains.
Inertial-assisted navigation in an urban canyon
San Francisco’s market street, like all urban canyons, is a very challenging environment for satellite navigation. (Photo: Spondylolithesis / iStock / Getty Images Plus / Getty Images)
Urban canyons — city streets lined with tall buildings on both sides — present two challenges to GNSS: a limited view of the sky, thus a reduced number of satellites in view and a higher positional dilution of precision (PDOP) than under open sky, and multipath, as signals bounce off the vertical faces of the buildings before reaching receivers on the ground. This greatly complicates the tasks of accurate positioning and navigation — which is especially important for vehicles in congested city traffic, where it is essential that they do not stray from their lane.
Hundreds of research papers on possible solutions to the challenge of urban canyons have been presented at satellite navigation conferences over the years. One standard way to compensate for both a reduced number of satellites in view and multipath is to couple a GNSS receiver with an INS. GNSS and INS are inherently complementary technologies.
An INS consists essentially of an inertial measurement unit (IMU) and a computer. An IMU measures an object’s linear acceleration (typically, with three orthogonally mounted accelerometers) and angular velocity (typically, with three orthogonally mounted gyroscopes) in three axes. Because an IMU requires no external inputs, it can operate in tunnels, inside buildings and underwater, and is unaffected by such vagaries of the radiofrequency environment as jamming and spoofing. An INS integrates IMU data to compute positions that are very stable epoch to epoch. However, all inertial systems accumulate measurement errors, an effect known as drift, and therefore must be periodically re-initialized.
Conversely, GNSS-based navigation systems offer consistent absolute positioning accuracy, but their performance is severely degraded by a restricted view of the sky and multipath, two conditions characteristic of urban canyons, as well as RF interference (jamming and spoofing) and ionospheric disturbances.
Therefore, GNSS and INS, when coupled, assist each other beautifully: The INS takes over when the performance of the GNSS receiver is degraded or entirely impeded, then the latter re-initializes the former once it returns to full operation.
An INS provides another benefit for vehicle navigation. In addition to providing data about a vehicle’s trajectory, it also measures its attitude (roll, pitch and yaw), thereby enabling the software to better correlate and interpret the data from the other sensors. For example, when a car breaks sharply, its front end goes down and any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface. An INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and that in which the vehicle is pointing (true heading). A slip angle as small as 0.5° can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks.
A recent test in one famous urban canyon proved once again the value of GNSS-INS integration.
Market Street in San Francisco is one of the major routes across the city, with a diverse urban landscape. It poses numerous challenges in effectively navigating vehicles, especially autonomous ones, due to narrow streets with skyscrapers, resulting in limited sky view and severe multipath. ANELLO tested its GNSS INS here and evaluated the system’s performance in real-world driving conditions compared to other established inertial navigation systems solutions on the market.
Anello’s GNSS INS remains accurate despite multipath and a limited view of the sky. (Photo: ANELLO Photonics)
Market Street is a 3.5-mile urban artery that winds through diverse neighborhoods and commercial zones, presenting a formidable challenge for vehicle navigation as much due to its bustling traffic as for its towering urban canyons. The ANELLO GNSS INS addresses this complex environment by integrating data from its optical gyroscope with those from a GNSS receiver and wheel speed odometers using its sensor fusion engine and unique optical gyroscope technology. In addition to autonomous vehicles, it is also a good solution for agriculture, robotics, construction, trucking, mapping/surveying and defense applications.
To evaluate the performance of its GNSS INS, ANELLO installed it on a test vehicle together with a comparable system made by a different company. The ANELLO team then conducted multiple drives along Market Street, focusing its assessment on the system’s overall heading and positional accuracy. According to ANELLO, the system maintained a close alignment with the vehicle’s actual position along the entire route with a drift of about 1 m on multiple occasions, “significantly outperforming its competitor’s drift rates of 15.5 m, over a drive length of 250 m.”
“The interplay between GNSS and INS is like a tightly choreographed dance,” said Schauble, “where the choreographer is a sensor fusion algorithm. This algorithm continuously evaluates the quality of the GNSS and IMU measurements, assigning weights to each based on their reliability and accuracy.”
The accuracy of an INS is inherently dependent on the quality of its IMU. “When an INS system containing a MEMS IMU is used in an urban canyon, the algorithm is forced to either lean more heavily on the degraded GNSS measurements or accept the noisy and biased IMU measurements,” Schauble pointed out. “This often results in a poor and unpredictable solution in such environments. On the other hand, ANELLO’s GNSS INS leverages a silicon photonics optical gyroscope (SiPhOG) that provides significantly better bias and noise compared to MEMS IMUs. This makes the algorithms less vulnerable to degraded GNSS and multipath effects, allowing the INS solution to maintain accurate positioning in an urban canyon.”
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
The Texas Attorney General’s Office has filed a lawsuit against General Motors (GM), alleging that the company unlawfully collected and sold driving data from more than 1.5 million Texas drivers. The lawsuit claims that GM gathered detailed information from vehicles manufactured since 2015. Additionally, the lawsuit alleges that GM deceived customers by compelling them to enroll in data collection services during the vehicle “onboarding” process, without fully disclosing how their information would be used. The collected data was reportedly used by third-party companies to generate “driving scores” which were then sold to insurance providers.
3D Scans Reveal Medieval Secrets
Photo: Stichting Grote Kerk Naarden
The Grote Kerk in Naarden, Netherlands, known as the “Sistine Chapel of the North,” is undergoing a 3D scanning project to uncover the secrets of its medieval ceiling murals. A team of researchers from various Dutch universities are collaborating to create a detailed digital 3D model of the church’s barrel vault, covering 700 square meters of painted planks and beams. The project aims to shed light on long-standing mysteries surrounding the artwork’s origins, including the identities of the artists and the precise timeframe of their creation. Researchers will use advanced 3D scanning technology to produce high-resolution digital replicas of the murals, allowing researchers to examine the artwork in extraordinary detail.
Archaeologists Unearth Hidden Empire
Photo: University of Cádiz
Archaeologists from the University of Cádiz in Spain have discovered 57 Roman Empire-era sites in the Sierra de Cádiz regions, revealed what researchers believe to be an undiscovered part of the Roman empire. The team used multispectral cameras and lidar to detect these hidden sites. The team has begun on-site excavations, including work at the Roman villa of El Canuelo in Bornos, and plans to continue its research to gain a more comprehensive view of Roman settlement in the region.
Mapping Secrets of the Seafloor
Photo: SuBastian/Schmidt Ocean Institute via CNN
Oceanographers from the Schmidt Ocean Institute used advanced sonar technology to map a massive underwater mountain in Nazca Ridge, 900 miles off the coast of Chile. The team employed a hull-mounted sonar system on their research vessel, R/V Falkor, to create detailed maps of the seafloor. In addition to sonar mapping, the team used an underwater robot to explore the mountain and surrounding areas. This robotic technology allowed them to document rare marine life, including the ghostly white Casper octopus and unusual siphonophores nicknamed “flying spaghetti monsters”.
A roundup of recent products in the GNSS and inertial positioning industry from the November 2024 issue of GPS World magazine.
OEM
High-Dynamics MEMS Gyro Designed for precision navigation applications
The GYPRO4300 is a high-dynamics MEMS gyro designed for precision navigation applications. It features a ±300 °/s input range, 200 Hz bandwidth and 1 ms latency, making it ideal for dynamic environments. With a bias instability of 0.4 °/h and an angular random walk of 0.07 °/√h, the GYPRO4300 offers high-performance sensing in a compact, digital and low size, weight and power (SWaP) package.
Building on the GYPRO4300, the GYPRO4050 is a specialized north-seeking gyro for low-dynamics applications. This derivative offers 2° azimuth accuracy and is currently in the customer sampling stage. The GYPRO4050 maintains the same miniature package design as its predecessor, ensuring consistency across the product line.
At INTERGEO 2024, TDK showcased a prototype based on an ongoing research and development project. This new development utilizes the same miniature package as the GYPRO4300 and GYPRO4050 but demonstrates ultra-low noise capabilities, achieving an azimuth accuracy of less than 1°. This product is slated for launch in 2025.
This series of anti-jamming antennas comes in two models, PT023 and PT024. The antennas are specifically engineered to operate in challenging environments characterized by complex electromagnetic interference, high-power signals and strong multipath effects.
They are well-suited for scenarios involving low-elevation angle interference, high-power interference sources and radio communication system noise. The PT023 model utilizes multiple array elements combined with amplitude and phase manipulation to achieve spatial radiation shaping. This antenna also incorporates advanced multi-level filtering technology, effectively suppressing out-of-band noise power.
The PT024 model features vertical and horizontal two-dimensional polarization suppressors. This design effectively mitigates the reception of both odd and even LHCP and RHCP signals originating from the rear of the antenna, according to the company. It can also suppress low-elevation multipath signals at the same frequency and out-of-band noise signals. These features seek to enhance the antenna’s performance in complex electromagnetic environments.
Triple-Band RTK Receivers Integrated into ArduSimple’s evaluation boards
The UM980, UM981 and UM982 RTK modules are integrated into the ArduSimple simpleRTK3B series to accelerate high-precision GNSS integration. Supporting Galileo High Accuracy Service (HAS) and fast update rate (50Hz), these devices are suitable for applications that require reliable and precise navigation.
SimpleRTK3B Budget (UM980): The most affordable step into triple-band precision.
SimpleRTK3B Fusion (UM981): Ideal for projects that need GNSS and inertial measurement unit (IMU) sensor fusion or tilt compensation.
SimpleRTK3B Compass (UM982): Designed for setups requiring dual antennas to determine the heading on moving platforms.
ArduSimple has also integrated Unicore UM980, UM981 or UM982 modules into the simpleRTK3B Micro Unicore, part of its compact Micro-format lineup. It is designed for simple PCB integration, which can significantly speed up the development process and the time to market for new products.
The HX-SE402A and HX-SE403A are full-band, full-frequency antennas that integrate GNSS capabilities with a low-profile radio antenna to support 858-878MHz and 902-928MHz frequency bands. This addresses the growing need for devices requiring both navigation and communication functionalities. Harxon’s new low-profile technology achieves the same functionality at 10 mm height, allowing greater versatility in applications that demand precise positioning alongside wireless communication. Additionally, Harxon offers custom tuning services to optimize integration into OEM end-user modules for specific applications.
Advanced Navigation has expanded its Certus product line by introducing the Certus Mini series. This development marks a significant advancement in compact and high-performance navigation technology for field robots, autonomous vehicles and UAVs.
The Certus Mini series comes in three variants:
Certus Mini D: A dual-antenna inertial navigation system (INS).
Certus Mini N: A GNSS-aided INS.
Certus Mini A: An attitude and heading reference system (AHRS).
These lightweight systems, weighing no more than 55 grams (1.9 oz), offer impressive performance and cost-efficiency for their size. The Certus Mini D utilizes dual-antenna GNSS for accurate heading, position and velocity measurements. It operates on L1/L5 multi-constellation GNSS and offers enhanced interference immunity and position accuracy, particularly in challenging urban environments. The Certus Mini series suits various applications, including surveying, agricultural robotics, open-pit mining and asset tracking.
Direct Georeferencing Solution Designed for UAV mapping
The APX RTX portfolio is a new line of direct georeferencing solutions designed for UAV mapping sensors. This system enables high-accuracy mapping across diverse environments, ideal for OEMs and UAV payload integrators. At the core of the APX RTX portfolio is the Trimble CenterPoint RTX technology, which offers both real-time and post-mission direct georeferencing. This capability allows for centimeter-level accuracy without the need for base stations, making it compatible with various sensors, including cameras, lidar and hyperspectral mapping devices.
The DT46 lidar UAV is a fixed-wing system designed for long-distance inspections and the creation of precise digital twins. The DT46 model integrates the YellowScan Voyager lidar with a high-resolution RGB camera. Equipped with a laser scanner with a 100° field of view and an acquisition rate of up to 2400 kHz, the YellowScan Voyager offers optimal point density for demanding projects.
With a flight range of up to 300 km, depending on whether vertical take-off and landing (VTOL) or catapult take-off is employed, the UAV is designed for long-distance operations and can be deployed in under 15 minutes without requiring specialized tools. This autonomous solution offers a seamless end-to-end solution for various industries requiring aerial surveying and inspection capabilities.
GNSS Receiver Featuring a multi-constellation antenna
The Stonex S900 GNSS receiver features a high-accuracy, multi-constellation antenna, a powerful UHF transmitter and the GSM 4G modem for a fully integrated communications choice, combined with a light and modern design. It tracks signals from GPS, GLONASS, BeiDou, Galileo and QZSS satellites. On the S900, two smart hot-swappable batteries can be inserted simultaneously, ensuring a maximum of 12 hours of operation. The power level can be checked and seen on the controller or directly on an LED bar on the battery.
The HydroBoat 1500 is a versatile unmanned surface vessel (USV) driven by four powerful thrusters and designed to carry out underwater topographic surveys of lakes, rivers, reservoirs and other bodies of water. With a payload capacity of 60 kg, it can be integrated with the SatLab HydroBeam M4 portable multibeam echosounder, as well as a variety of other payloads such as side scan sonars and ADCPs. The vessel is IP67-rated and includes a millimeter-wave radar and 360° omnidirectional camera for accurate obstacle detection and safe navigation. It is also equipped with a dual RF and 4G cellular communications system.
The Jupiter Laser RTK integrates GNSS, auto-IMU (inertial measurement unit), laser and dual-camera systems into a single unit. It incorporates a precise green laser that remains visible even in bright daylight. This feature allows for precise measurements of points in hard-to-reach, signal-blocked or potentially hazardous locations. It also features a night vision camera, allowing users to see feature points even in low-light conditions.
The RTK system’s laser range is up to 50 m, making it suitable for challenging surveying environments. It incorporates visual technology to offer surveyors an immersive experience during surveying and stakeout operations, improving working efficiency and productivity.
EchoONE combines Teledyne’s lidar and camera technology with Inertial Labs’ remote sensing payload instrument (RESEPI). EchoONE is designed for industries requiring precise aerial surveying and mapping solutions, such as land surveying, electric utility vegetation management, asset modeling, as well as transportation and infrastructure projects. Users can create detailed 3D models for infrastructure and asset management, offering valuable insights for maintenance and planning. EchoONE also generates fully undecimated georeferenced point clouds in real time, which allows for in-field verification. This capability is complemented by rapid post-processing through RESEPI’s “one-click” PC-Master Pro solution.
The i83 Pro is an inertial measurement unit (IMU) real-time kinematic (RTK) GNSS receiver. This receiver combines GNSS capabilities with extensive compatibility options to address the diverse needs of surveying, construction, and mapping professionals. It incorporates CHCNAV’s third-generation GNSS antenna and the latest iStar algorithm, designed to boost GNSS signal tracking efficiency by 30%, according to the company. With 336 channels supporting GPS, GLONASS, BeiDou, Galileo and QZSS constellations, it can achieve centimeter-level precision rapidly, even in challenging environments.
The i83 Pro supports various GNSS surveying modes, such as RTK Networks NTRIP and UHF base-rover configurations. It features an IP68-rated enclosure for dust and water protection, a compact and lightweight design for enhanced portability, a high-resolution color display for clear status information and a 20-hour battery life for continuous operation in rover mode.
LP360 Land is designed to process lidar, GNSS and SLAM data from handheld sensors, particularly the TrueView GO handheld scanner. It features a GIS interface that allows users to combine various geospatial datasets and offers SLAM point cloud processing capabilities. Additionally, LP360 Land includes advanced visualization tools that support multiple synchronized windows for 2D, 3D, profile and immersive views.
Its coordinate system management includes datum and projection transformations. The software also offers quality assurance and control (QA/QC) tools, along with data editing and cleaning functionalities. Users can perform manual and automatic registration of point clouds and utilize an image explorer for contextual analysis by linking point clouds to photos, which allows for the generation of accurate and colorized point clouds even in GPS-denied environments.
IT’S ALL PHYSICS. How things work, that is. Well, maybe a little chemistry too in some cases. I might be a little biased in my opinion given that I’m an applied physicist by training. Radio? Satellite navigation? Yes, the principles of their operation are all governed by physics. Many physicists of my generation started out as radio tinkerers. I’ve recounted in this column before that I built my first radio (from a kit) when I was 14 (not counting the crystal radio that my father helped me to put together when I was 8 or 9). I built a few more during high school, got into radio astronomy as an undergraduate and did a Ph.D. in the application of very long baseline (radio) interferometry to geodesy.
The great American physicist Richard Feynman was also a radio tinkerer in his youth. He recounts in one of his autobiographical books how he used to fix radios. Since he would approach the task of repairing each non-functioning set by first contemplating why it wasn’t working, he got the reputation of fixing radios by thinking!
One of Feynman’s special abilities was in explaining how things worked. In fact, he has been called “The Great Explainer.” He authored what is arguably the best physics textbooks ever produced: The Feynman Lectures on Physics. The three-volume set, developed from his Caltech lectures to undergraduates between 1961 and 1964, covers mechanics, radiation, electromagnetism, matter and quantum mechanics. Many students and practicing physicists have learned or relearned aspects of physics from the famous “red books.” Many more will now thank Caltech, which recently put the Lectures online for anyone to read.
In the February 2016 column, we learned about the development of a microprocessor-controlled multi-element GNSS antenna array for interference rejection. While there are many textbooks that describe how multi-element antennas work, Feynman explains their operation in his Lectures from first principles–from the principles of physics. The phenomenon governing the behavior of antennas with multiple elements is called interference.
If we combine two electromagnetic waves, they will interfere with each other with a result that depends on the relative phase (or phase difference) of the waves. The waves might reinforce each other leading to a larger net amplitude, called constructive interference, or partially or fully null each other out, called destructive interference. When we apply this concept to the signals transmitted by a pair of antennas making up an array in a horizontal plane, we find that the array has directionality. That is, if we space the antennas by one-half wavelength of the signal to be transmitted and feed the antennas in phase (zero phase difference), we will transmit a strong signal in the directions perpendicular to the baseline connecting the antennas (say east-west) and no signal in the orthogonal directions (north-south). If we use this antenna pair for receiving, we will have a null in the reception pattern to the north and to the south and will be insensitive to signals arriving from those directions. And as Feynman describes in his lectures, by adding more antennas to the array and “some cleverness in spacing and phasing our antennas,” we can have a fairly narrow pattern null in a chosen direction. In the case of a GNSS antenna array, that direction might be that of a jamming signal and so we can null out the jammer and maintain a positioning capability.
There is more to it in developing a practical microprocessor-controlled GNSS antenna array, but it starts with the physics.
The GPS World team touched down in Stuttgart, Germany, for INTERGEO 2024, held from Sept. 24-26.
This year’s expo and conference, which attracted more than 17,000 visitors from 121 countries and featured 579 exhibitors, showcased solutions to address critical global issues such as climate change, urbanization and GNSS jamming and spoofing.
Ray Weatherbee, CEO, Stonex USA, and Tim Carolin, Account Executive, GPS World. Photo: GPS World Staff
GPS World Publisher Brian Kanaba and Account Manager Tim Carolin made their debut at the show, joining veteran Editor-in-Chief Matteo Luccio. The team had the opportunity to explore the expansive show floor, experiencing firsthand the latest innovations from around the world. With three floors of exhibits, Kanaba, Carolin and Luccio engaged with partners and established valuable connections with industry leaders. Their attendance highlights GPS World’s dedication to remaining at the forefront of geospatial technology and trends, emphasizing a strong commitment to collaboration and innovation within the industry.
GPS World staff: Matteo Luccio, Editor-in-Chief, Brian Kanaba, Publisher, and Tim Carolin, Account Executive. (Photo: GPS World Staff)



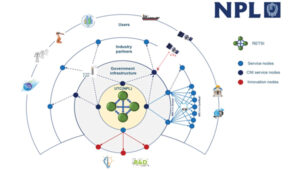


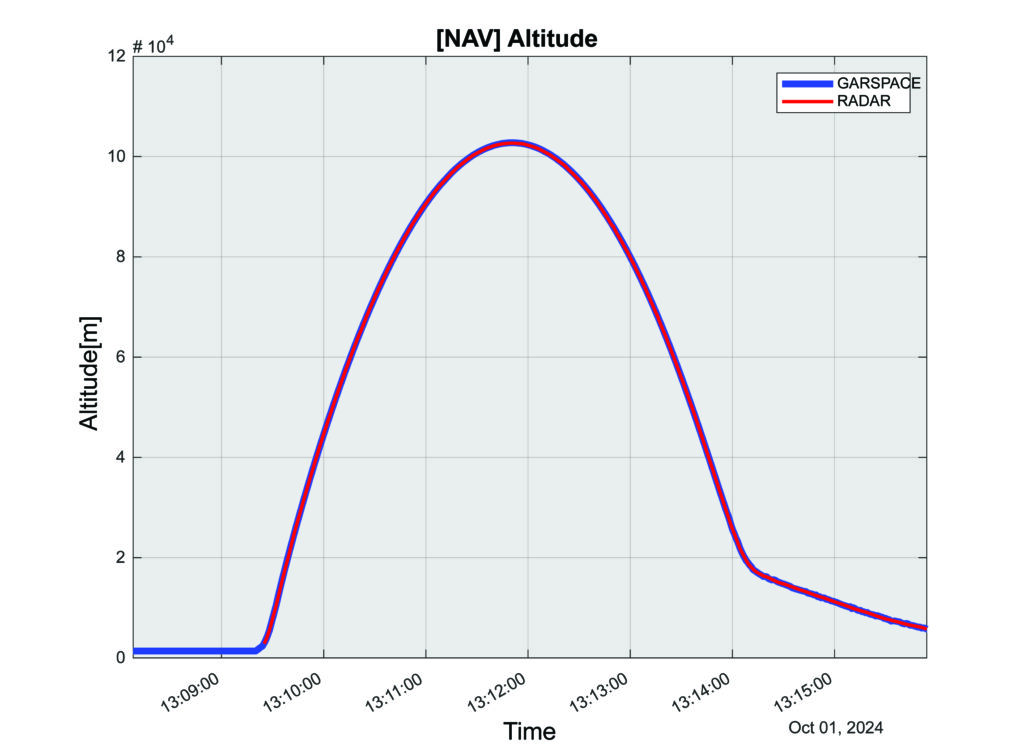
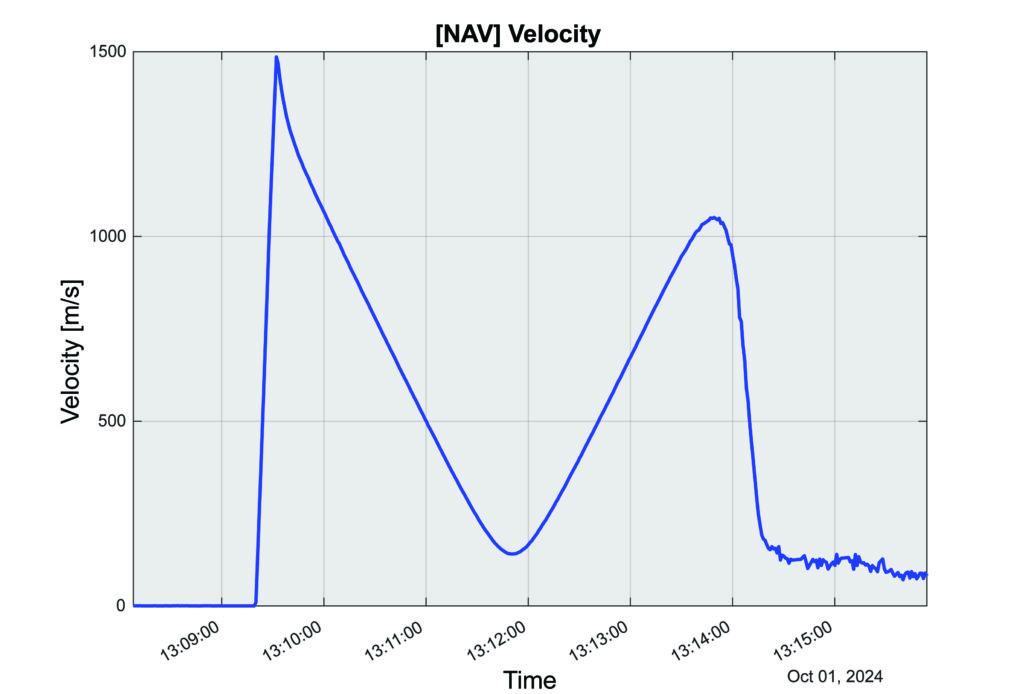
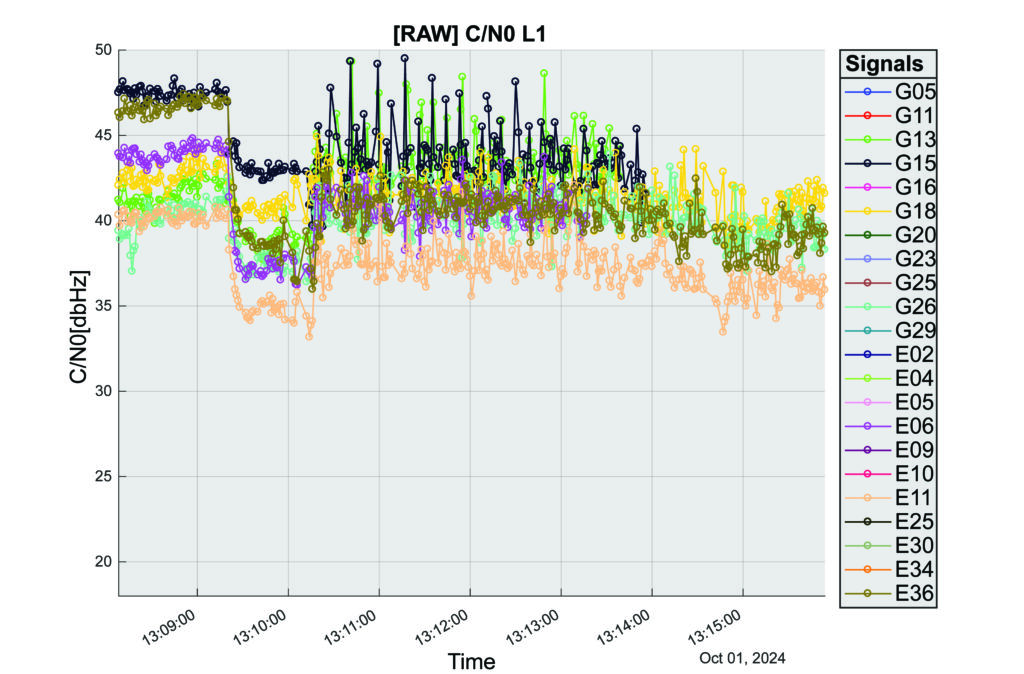
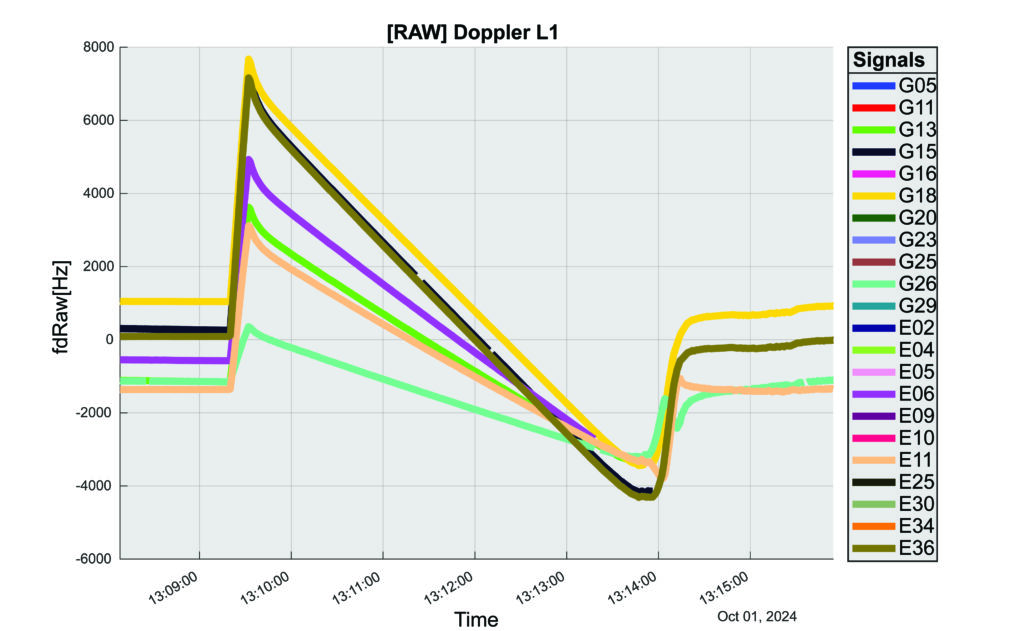
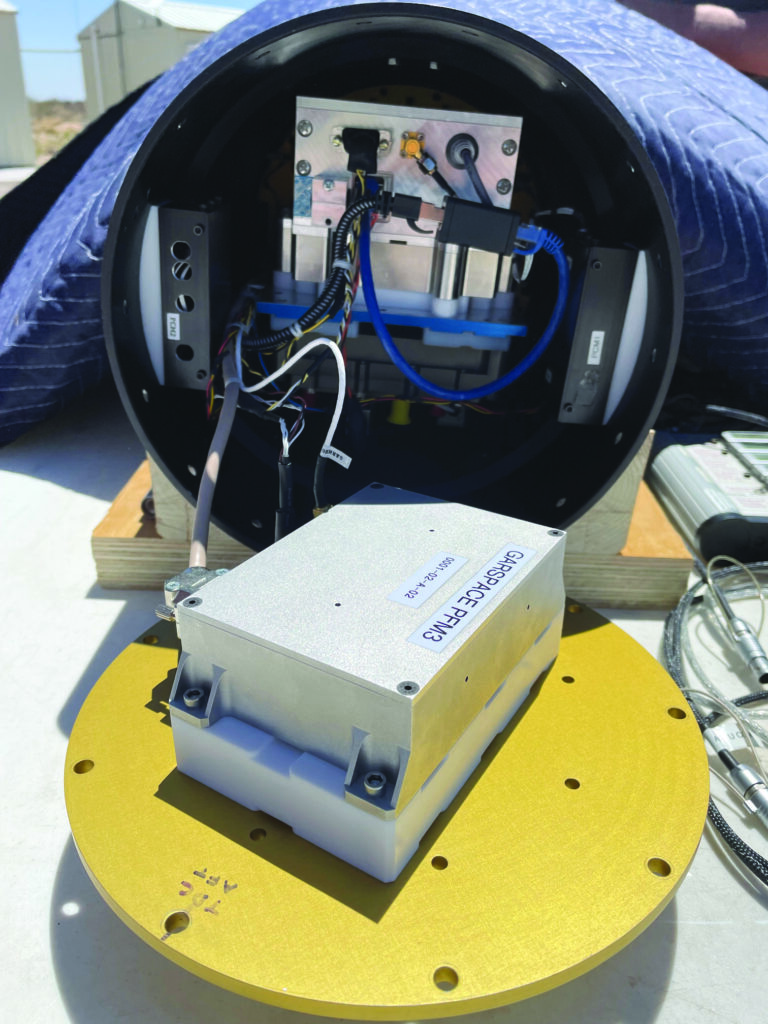
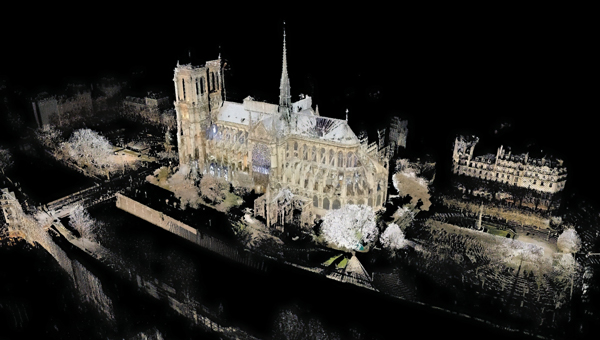

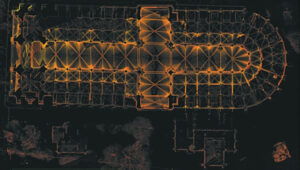
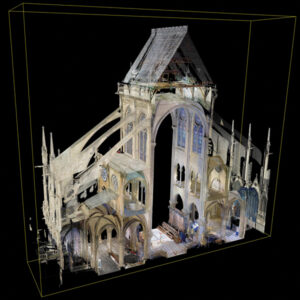




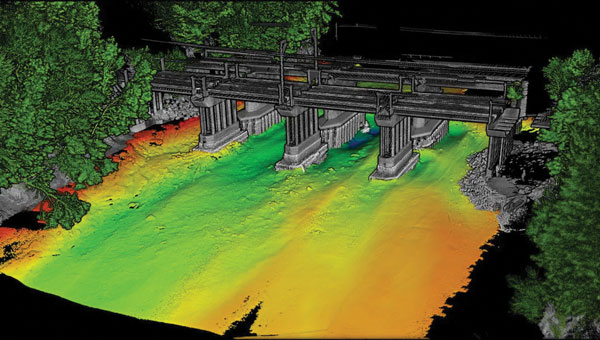











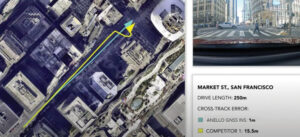



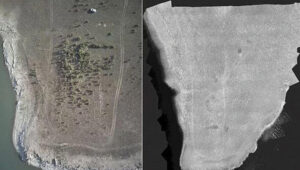
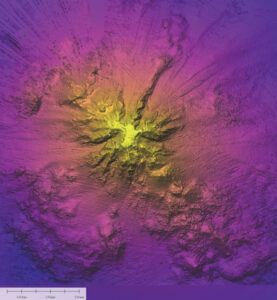

 High-Dynamics MEMS Gyro
High-Dynamics MEMS Gyro Anti-Jamming
Anti-Jamming Triple-Band RTK Receivers
Triple-Band RTK Receivers OEM GNSS Antenna
OEM GNSS Antenna OEMs
OEMs Direct Georeferencing Solution
Direct Georeferencing Solution Fixed-Wing UAV
Fixed-Wing UAV GNSS Receiver
GNSS Receiver USV
USV Laser RTK
Laser RTK UAV Lidar Scanner
UAV Lidar Scanner Receiver
Receiver Software Solution
Software Solution




