Controlling weeds is a natural challenge in agriculture. The cost of controlling these unwanted plants is also one of the most expensive line items in a farmer’s budget. For third-generation Brazilian farmer Ivan Bedin, trying to rid his 8,620-hectare soybean and corn farm of hearty weeds has been a costly challenge.
“Typically, we’ve had to blanket spray weed-killing chemicals throughout the entire farm,” Bedin said. “Even if only 15% or 20% of the area was weed-infested, we had to spray the total area. We were spending more than $145,000 a year on chemicals, and it wasn’t good for the environment.”
The Bedin family then acquired Trimble’s WeedSeeker 2 technology. This intelligent spot-spray system senses whether a weed is present and signals a spray nozzle to deliver a precise amount of chemical, spraying only the weed. By targeting resistant weeds individually, WeedSeeker 2 can reduce the amount of herbicides used by up to 90%, promoting sustainability and cost savings on the farm.
While driving 18–20 km/hr, the sprayer’s operator focuses on the WeedSeeker application while the AutoPilot system guides the sprayer. As he drives between crop rows, optical sensors distinguish the green of the crop from the green weed and release herbicide just on the weed. From inside the cab, the operator can monitor the spray system and adjust any application parameters in real time. With the reliability of the steering technology and the efficiency of WeedSeeker, Bedin has been able to reduce refueling time and cover his entire field 30% faster than with his conventional system.
Most importantly, the technology has significantly slashed his weed-chemical expense. “WeedSeeker 2 has yielded us nearly 90% savings in herbicide costs,” said Bedin. “Now we only need to spray between 10% to 30% of the farm — where the weeds actually grow — which equals a savings of about $70,000 for each 1,000 hectares sprayed. Additionally, because we use less herbicide, we impact the environment less.”
Because the spot-spray system logs and maps every weed sprayed, Bedin can also see in real time where there are weed infestations and review the detailed maps before the next spray. With the “seek and destroy” premise of WeedSeeker 2, Bedin’s formidable weeds may have finally met their match.
On a French vineyard in the Loire Valley, a tractor is driving between the grape vines with no one behind the wheel. Meet TREKTOR, the autonomous hybrid robot that works tirelessly to weed the organic vineyard producing some of the finest Gamay wine, called Anjou Gamay Village.
After TREKTOR worked the land for a month, its developer, a company called Sitia, reviewed the quality of their autonomous robot’s work. They counted grape vines damaged during operation — two in one month — and approached the farmer to reconcile the liability. To Sitia’s surprise, he responded, “When I use my manual tractor to get the same job done, I damage at least two vines a day! How did your tractor manage to be so careful?” Sitia’s developers thought for a while and then replied, “It’s thanks to the high quality and accuracy of the components that are inside.”
“Despite the strong magnetic field emitted by the generator on the TREKTOR, the AsteRx SB ProDirect receiver did not have any issues,” said Clément Aubry-Tardif, Sitia’s R&D manager. “The spectrum analyzer in its web interface showed other small radio interferences aboard the robot, but everything was still working fine.”
Integrated into the TREKTOR is an AsteRx SB ProDirect dual-antenna receiver, which provides the reliable high-accuracy positioning and heading needed for autonomous operation. Sitia chose the receiver for the following reasons.
It has centimeter-level accuracy with RTK, which reduces crop damage and increases yields.
Its heading helps point implements in the right direction. Unlike inertial systems, it’s reliable and accurate even in static or slow-moving applications.
Built-in advanced interference mitigation (AIM+) technology makes it resistant to radio interference, while its LOCK+ technology ensures robust satellite tracking even under intense vibrations or shocks.
It includes an intuitive web interface for fast prototyping and easy real-time testing.
Sitia is a French company specializing in autonomous robots. Its TREKTOR helps compensate for the current farmer shortage, which is especially felt on organic farms, where weeding is seven times more labor intensive due to the use of few (if any) herbicides. TREKTOR is a flexible solution that can adjust its height and width on the fly, adapting to various working environments. It can also change implements to perform various functions. Depending on TREKTOR’s dimensions and implements, the distance from the crop to the robot changes, making high-accuracy positioning crucial to minimize damage to any of the crops.
Farmers rely on their GNSS receivers to keep their machines on track, their maps accurate, and their rows straight in demanding environments. GNSS receivers on agricultural equipment need to continue to perform at a high level when faced with extreme weather, temperature and vibration while navigating varying terrain. In addition, farmers rely on the correction services that provide them with the high accuracy needed to keep them operating. Still, they face challenges with outages and interruptions from obstacles blocking satellite signals.
Hexagon | NovAtel’s SMART7 GNSS receiver and TerraStar Correction Services together create an accurate, robust and reliable solution for farmers. These products undergo extensive testing to ensure a high-performing and dependable solution. The SMART7 accesses all four GNSS constellations (GPS, GLONASS, BeiDou and Galileo), providing the best availability in variable terrain and environmental conditions. To compensate for the pitch and roll in the field, the receiver includes terrain compensation — keeping farmers at centimeter-level accuracy when using TerraStar-C PRO, TerraStar-X or RTK corrections.
Photo: Hexagon | Novatel
TerraStar Correction Services are based on a global network of advanced and proprietary GNSS control centers to ensure 99.999% signal availability to farmers. By delivering quality satellite corrections without the need for base stations, farmers can get the accuracy needed for their operations in a scalable format that moves with their equipment.
Jacob Van Den Borne is a potato farmer in the southern region of the Netherlands. He has been working with precision farming for more than 10 years and recently switched his Fendt tractor to NovAtel’s SMART7. Throughout his last season, Jacob noticed a substantial improvement in signal reception while passing along the edges of his heavily treed field. Previously, his GNSS equipment would lose reception, causing his rows to wander. After using a SMART7 for one season and experiencing its high precision and reliability, Van Den Borne plans to switch all receivers on his farm to the SMART7.
Evolving advanced driver-assistance systems (ADAS) and developing safe perception and positioning systems in the agriculture industry are top priorities for NovAtel. With the challenges faced by farmers, finding new ways to support a sustainable increase in their production and productivity will help ease the pressures of a growing population.
Today, many field operations — sowing, tilling, planting, cultivating, weeding and harvesting — rely on satellite-based autonomous guidance technology for agricultural machines. Yet farmers are still challenged by poor signal tracking, signal interference, communication instability and heading inaccuracy in tough environments, such as on uneven ground or slopes or under dense tree canopy. Because of insufficiently advanced navigation technology, ordinary machines fail to achieve the high efficiency expected and might even cause safety hazards. Therefore, the market has been awaiting a high-performance smart antenna with centimeter-level accuracy.
Harxon’s Smart Antenna TS112 PRO provides scalable and reliable positioning solutions for tough agricultural environments, such as uneven ground or fields with underground cables, as well as complicated weather conditions, including rain, fog and dust clouds.
The TS112 PRO integrates in one compact enclosure Harxon’s four-in-one GNSS/4G/Bluetooth/Wi-Fi antenna and a Hexagon | NovAtel OEM GNSS module. The multi-constellation GNSS antenna is designed with Harxon X-Survey technology and features multi-point feeding with high gain and wide beam width, which ensures high phase-center stability for ultimate RTK centimeter-level positioning accuracy. This is realized by subscribing to the Ntrip service via the LTE network to receive corrections or by setting up a local base station to broadcast corrections by radio.
The Hexagon | NovAtel OEM GNSS module is default-enabled for RTK, offering precise positioning and advanced interference mitigation for space-constrained applications and challenging environments. Additionally, users can achieve globally available centimeter-level positioning accuracy by using TerraStar satellite-delivered L-band correction services, with no need to set up an expensive network infrastructure.
TS112 PRO guarantees pass-to-pass accuracy down to 20 centimeters, where relative positioning is critical. It can also provide smoother steering and straighter rows by reducing positioning jumps that might occur during RTK signal outages or when a smart antenna changes positioning modes. Its terrain compensation algorithm is capable of correcting deviations caused by a vehicle’s roll and pitch while working on uneven ground or slopes.
Automated steering systems have been widely deployed in advanced industrial countries and on large farms to improve agricultural productivity. However, technological and price barriers have constrained their wider adoption. Reliable RTK positioning and the expected accuracy of automated steering systems enable farmers to optimize their work efforts while reducing input costs and fuel consumption.
CHCNAV customer Niva LLC in Voronezh, Russia, was particularly interested in acquiring an automated steering system able to provide consistent high accuracy, even in scattered fields over long distances and with unstable coverage for GSM (the Global System for Mobile communication, a cell phone standard used in most of the world). Some systems Niva tested would lose GNSS RTK network correction signal reception while working in difficult terrain with gullies. A dual GNSS RTK correction source was therefore a key technical feature to ensure uninterrupted auto-steering operation in all terrain configurations.
The CHCNAV NX510 SE’s built-in connectivity modules include a 4G modem and an additional UHF radio module to allow farmers to work with RTK correction sources from local RTK networks or GNSS RTK base stations for no additional cost. As a result, the NX510 SE can receive GNSS RTK corrections from various GNSS network operators as well as from a local radio modem input to compensate for possible poor GSM coverage. The system’s combined GNSS+INS terrain-compensation technology ensures automated steering accuracy of 2.5 centimeters and offers excellent performance in ditching, seeding and harvesting applications.
Niva also wanted an auto-steering system that could be quickly and easily mounted on a variety of tractors and other farm vehicles at a price that would allow for rapid return on investment. The NX510 SE can be moved from one tractor to another in less than 40 minutes, as farming operations change. The software’s user interface for controlling field operations is designed for both experienced and casual users to allow even greater flexibility.
Intelligent navigation-based automation is redefining the farmer’s humble tractor to robotic status. This results in significantly faster field preparation and cropping and dramatically reduced labor costs.
Any autonomous vehicle requires the highest levels of navigational accuracy, control and safety. For farming applications, this typically means maintaining exact heading at very low speeds, often over bumpy terrain. These requirements make using the right navigational equipment critical to success. The key challenge is maintaining precise placement and movement of the tractor relative to crop rows and field boundaries. Failure to maintain precision can cause rows to be damaged or planted seedlings to be uprooted. The typical accuracy required for precision farming is position to within a decimeter (10 cm) — well beyond basic GNSS. This requires real-time kinematic (RTK) positioning and advanced signal processing.
Sabanto, a U.S.-based farming as a service (FaaS) start-up, was facing this exact challenge. The company needed a precise and reliable navigation solution for its fleet of driverless tractors deployed in a growing number of U.S. states, including Illinois, Iowa, Nebraska and Minnesota.
“The reliability of Advanced Navigation’s GNSS Compass gave us the peace of mind required to operate fully autonomously from Spring to Fall of 2020,” explained Craig Rupp, CEO of Sabanto.
Thanks to its dual-antenna GNSS and RTK corrections, the GNSS Compass can offer high-accuracy heading. Accurate position is maintained using real-time correction data, delivered from nearby ground base stations, resulting in near-centimeter accuracy under the most demanding conditions.
Furthermore, the GNSS Compass includes an integrated inertial navigation system (INS) to ensure consistent position accuracy of the tractor in the event of degraded or lost signals from GNSS satellites from heavy canopy or steep terrain. Roll, pitch and heading data also improve the stability of the autonomous platform over difficult terrain.
Sabanto engineers can now deploy and remotely monitor their fleet of autonomous tractors 24/7. Operators can simply pre-program the itinerary and field boundaries, as well as when to lift and lower tillers, resulting in the tractors planting up to two hectares (five acres) per hour.
A roundup of recent products in the GNSS and inertial positioning industry from the January 2022 issue of GPS World magazine.
Surveying
Base Station
Receives all available GNSS signals
Photo: Trimble
The Trimble R750 GNSS modular receiver is a connected base station for use in civil construction, geospatial and agricultural applications. The R750 provides high-accuracy base-station performance, giving contractors, surveyors and farmers more reliable and precise positioning in the field. The R750 also can be used to broadcast real-time kinematic (RTK) corrections for a wide range of applications, including seismic surveying, monitoring, civil construction, precision agriculture and more. Access to all available satellite signals provides improved performance and reliability when used with a Trimble ProPoint GNSS rover. ProPoint gives users improved performance in challenging GNSS conditions, with improved signal management.
Trimble, trimble.com
Flight Planning
Updated for safer UAV surveying
Photo: Microdrones
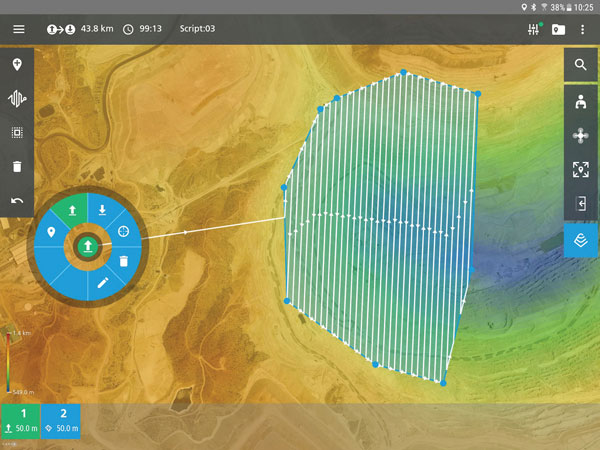
The mdCockpit app was designed for professional drone users to make it easy to plan, monitor, change and control flights from an Android tablet. The updates in version 2021.3 include features that improve flight safety and give more options for surveying with an aim to deliver a premier solution for planning, monitoring, adjusting, analyzing and controlling professional drone flight missions from a tablet. Updates include an improved flight editor, flight data collection and drone configuration. Drone pilots can download mdCockpit through the Google Play store.
Microdrones, microdrones.com
OEM
LTE Module
With 2G fallback for Latin America
Photo: Telit
The LE910S1-ELG LTE Cat 1 module is designed for internet of things (IoT) applications in Latin America that need a combination of performance, affordability and voice support in a compact form factor. It provides 2G fallback, making it suitable for areas that have not upgraded to 4G. With an embedded GNSS receiver, the cost-optimized LE910S1-ELG is suitable for tracking applications such as fleet management, stolen-vehicle tracking and recovery, and other mobile IoT applications that need to maintain a reliable connection when moving around in a country, region or multiple regions. The power-saving embedded GNSS receiver enables the use of GNSS positioning even when the cellular modem is switched off.
Telit, telit.com
Flex Power
Capability now on constellation simulator
Photo: Spirent
A new positioning, navigation and timing (PNT) test capability commonly referred to as programmable power — or flex power — is available on the Spirent GSS9000 constellation simulator and can be applied to existing scenarios. Flex power is the reallocation of transmit power among individual signals in GPS satellites, providing a countermeasure against GPS jamming. Spirent simulators fully support programmable power for M-code, Y-code and C/A (coarse acquisition) code.
Spirent, spirent.com
GNSS Module
Automotive qualified with INS and dead reckoning
Photo: STMicroelectronics
The Teseo-VIC3DA is the latest member of the Teseo module family, designed for vehicle positioning. It combines the Teseo III GNSS integrated circuit with the 6-axis MEMS inertial measurement unit (IMU) and dead-reckoning software to provide super-high-resolution motion tracking for advanced vehicle navigation and telematics applications. Teseo III offers robust positioning capabilities by simultaneously receiving signals from GPS, Galileo, GLONASS, BeiDou and QZSS constellations. The module enables competitively priced in-car navigation, fleet management and insurance-monitoring applications.
STMicroelectronics, st.com
PNT Platform
Protects critical infrastructure from GNSS vulnerabilities
Photo: ADVA
The scalable aPNT+ platform meets the latest guidelines for resilient positioning, navigation and timing (PNT), providing end-to-end control and timing network visibility for robust protection against the catastrophic risks that PNT disruption poses to national security and essential assets such as power grids. Even without GPS or GNSS timing, the solution provides an intelligent, end-to-end self-recovery system designed around a three-fold framework, integrating multi-layer detection, multi-source backup and multi-level fault-tolerant mitigation.
ADVA, adva.com
Timing Antennas
IP67-compliant for outdoor and marine environments
Photo: RadioWaves
A new series of GPS/GNSS timing antennas cover the L1 and L5 GPS bands, providing axial ratio and higher accuracy for the reception of satellite timing signals and reference frequencies for enhanced phase synchronization in precision network deployments. Their high gain, low noise figure of 2-dB and high out-of-band rejection allows for use of longer and cost-effective cables for easy and flexible installations. Built-in surge protection supports a wide range of GNSS including GPS, GLONASS, BeiDou and Galileo, as well as Iridium.
RadioWaves, radiowaves.com
Mapping
Imaging System
Designed for utility and infrastructure mapping
Photo: Geocue
True View 435 is an economical platform for utility-grade mapping, with superior ground-capturing capabilities for lightly vegetated areas. The next-generation compact 3D imaging system has the sensitivity needed for infrastructure mapping. Its position and orientation system is the Applanix APX-15, achieving accuracy of better than 5 cm RMSE and precision of better than 5 cm at 1 sigma.
GeoCue, geocue.com
Long-Range Scanner
Includes integrated GNSS receiver
Photo: Riegl
The VZ-2000i long-range 3D laser scanning system combines user friendliness with fast, accurate data acquisition. The flexible system includes an integrated GNSS unit for a high-accuracy real-time kinematic (RTK) solution. Other peripherals and accessories include a SIM card slot for 3G/4G LTE, WLAN, LAN, USB and other ports. A new processing architecture enables execution of different background tasks onboard in parallel to the simultaneous acquisition of scan data and image data, such as point-cloud registration, georeferencing and orientation via an integrated inertial measurement unit.
RIEGL, riegl.com
Transportation
Vehicle Antennas
Designed for Intelligent connected cars and trucks
Photo: Harxon
Two new GNSS antennas are designed for vehicles equipped with advanced sensors, controllers, actuators and other devices. They are enabled for intelligent information exchanges between the vehicle and everything (V2X), connecting autos with GNSS, 5G, Wi-Fi, ultra-wideband and more. The integrated antennas support dedicated short-range (DSRC) and cellular vehicle-to-everything (C-V2X) communication, embedding a premium GNSS antenna with high gain for consistent and reliable precise positioning service. They also allow for multiple input and output of data to achieve swift internet download speed in 5G networks.
Harxon, harxon.com
NVIDIA AV Support
Receiver now supported on autonomous platform
Photo: NovAtel
The PwrPak7-E1 GNSS receiver is now supported on the NVIDIA Drive Hyperion autonomous vehicle (AV) development platform. Selected for its robustness and precise position output, the PwrPak7-E1 will be offered with NVIDIA’s autonomous driving test fleets worldwide. Drive Hyperion is a fully operational, production-validated and open AV platform that reduces the time and cost required to outfit vehicles with autonomous driving and artificial intelligence (AI) features. The PwrPak7-E1 also is now compatible with NVIDIA’s DriveWorks v4 software release.
Hexagon | NovAtel, novatel.com
Splitter
Provides signals to two GNSS receivers
Photo: Tallysman
The TW162A automotive-grade smart power GNSS signal splitter supports the full GNSS spectrum: GPS/QZSS-L1/L2/L5, QZSS-L6, GLONASS-G1/G2/G3, Galileo-E1/E5a/E5b/E6, BeiDou-B1/B2/B2a/B3 and L-band correction service frequency band. It offers fail-over and fault-identification features. The splitter accepts power from all attached GNSS receivers; if one receiver fails, the next attached receiver automatically provides power to the splitter and antenna. If the antenna fails and does not draw current, all connected receivers will sense a current draw lower than 1 mA, indicating an antenna fault. The TW162A offers high performance in terms of noise figure, isolation and linearity.
Tallysman, tallysman.com
ADS-B Receiver
Enhances airport situational awareness
Photo: uAvionix
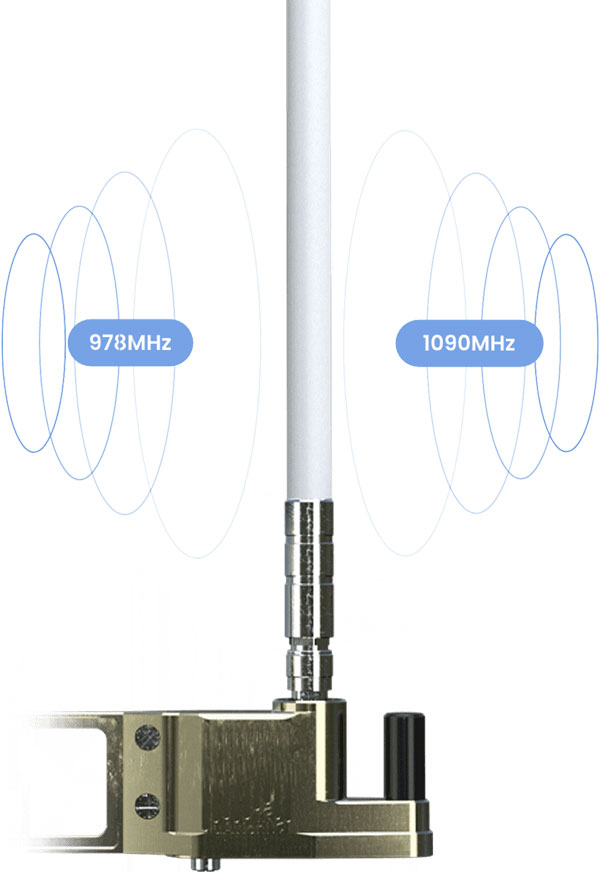
The pingStation 3 integrates 978 MHz and 1090 MHz ADS-B receivers, a GPS receiver, an antenna and a power-over-Ethernet (POE) interface into an easy-to-install, rugged weatherproof enclosure. With a selection of non-proprietary and industry-standard data interfaces, such as JSON and ASTERIX CAT 021, pingStation 3 is designed to integrate into a multitude of end-user applications, including airport displays, UAS Ground Control Stations (GCS), Unmanned Traffic Management (UTM) Solutions, and Flight Information Displays (FID). When paired with the VTU-20 airport vehicle ADS-B transmitter, pingStation 3 improves the situational awareness of ATCs and the safety of airport operations by reducing the risk of runway incursions.
uAvionix, uavionix.com
UAV
Defense UAS
Flexible UAV and control software combined
Photo: Ascent AeroSystems
Ascent AeroSystems’ Spirit coaxial unmanned aerial system (UAS) offers a versatile and durable system for mission-critical operations. With a modular, plug-and-play payload design, the Spirit’s open architecture allows operators to add or upgrade software to unlock new operating capabilities without the need to design or develop a new aircraft. Autonodyne’s additive software solution allows the Spirit to perform autonomous tasks either individually or as a team with multiple vehicles, from a single operator and control station.
Ascent AeroSystems, ascentaerosystems.com
Autonodyne, autonodyne.com
Evaluation Kits
Now include mosaic Septentrio modules
Photo: ArduSimple
Two Septentrio modules are being integrated into ArduSimple’s new evaluation kits — the mosaic-X5 GNSS module and the mosaic-H heading module. The new kits make resilient centimeter-level positioning easily accessible for testing and prototyping. ArduSimple’s kits provide triple-band real-time kinematic (RTK) GPS/GNSS as a plug-and-play solution for the most popular development platforms such as Arduino, STM Nucleo, Raspberry Pi, Ardupilot and Nvidia Jetson. It enables developers of robotics, UAVs and autonomous systems to try out mosaic, a unique module offering the latest high-performance GNSS positioning technology.
Septentrio, septentrio.com; ArduSimple, ardusimple.com
Geospatial Data
Drones as a service
Photo: Beagle
A drone network solution offers on-demand imagery to customers in Germany at resolutions up to 50 times higher than available from commercial satellite data providers. The Beagle M drone and sensors can deliver image data at 1-cm per pixel many times faster than satellites and regardless of cloud coverage. The company’s charging hangars enable quick flights. After completing an autonomous inspection flight (up to 200 km on a single charge), the drone returns to its hangar where it charges for its next mission. The drone takes just 90 minutes to become fully charged, and can then advance to its next mission without any physical contact between operator and aircraft.
Beagle Systems, beaglesystems.com
A PNT expert suggested that my piece titled “Opposite and Complementary: eLoran is part of the solution to GNSS vulnerability” in our November 2021 issue could be augmented with information not currently available on the proposed eLoran capability. This expert also questioned my statement that eLoran “does not have any common failure modes with GNSS” and pointed to potential common threats such as from cyberattacks, physical attacks, and space weather.
Matteo Luccio
I welcome such feedback on the contents of these pages — and agree that in this case some hard questions are warranted. So, in the interest of further exploring the use of eLoran, I pose some questions, hoping that its advocates will provide answers. I know that at least some of them will not shy away from this challenge.
Please note that I wish to keep the discussion on positioning, not the easier question of timing, because that was the primary focus of my article. I also wish to address long-term outages (weeks or months), which would have a greater impact on the United States.
Some of these questions have been addressed, at least in part, in various studies and proposals, most of them now more than a decade old. So, it would be helpful to update those answers and consolidate them in the pages of this magazine.
1. Accuracy specifics. While my November article stated that eLoran would have a two-dimensional accuracy of “better than 20 meters, and in many cases, better than 10 meters,” is that RMS, 95%, or some other statistic?
2. Performance standard. GPS provides a commitment to users in a published performance standard. What specific measures of positioning accuracy, integrity and continuity would you recommend the proposed eLoran system be committed to provide (using the architecture described in the answer to Question 6)?
3. Coverage. Would you recommend this eLoran positioning performance hold for the entire United States (including Alaska, Hawaii, Puerto Rico and other territories), only for the “lower 48” states, or only parts of these 48 states?
4. Current users. By number of users, the predominant common current civil uses of GNSS for positioning are consumer devices (mostly cellphones). By contribution to the U.S. economy, the predominant uses are high-precision applications. For what fraction of these uses would eLoran positioning be adequate? Could an eLoran receiver and antenna fit in today’s consumer devices?
5. Future uses. Emerging civil uses of GPS for positioning include autonomous ground and air vehicles, navigation to space and in space, and lane-accurate car navigation. Which of these could be served by eLoran?
6. Architecture. To maintain accuracy during a prolonged GPS outage, eLoran would require reference stations to calibrate time-varying propagation errors, as well as a certain number of transmitters for good nationwide geometry and for redundancy, ensuring service even if a transmitter is attacked or is taken off-line for maintenance. What architecture would you recommend to achieve this?
7. Infrastructure cost. What would be the cost of installing the required transmitters, power supplies, reference stations, communication links and control system for the architecture described in the answer to Question 6? Can you reference a recent and independent estimate? To a ballpark figure, what cost fixed-price contract would you accept to implement it? Similarly, what would be the annual costs for operating and maintaining this infrastructure?
8. Impact. eLoran transmitters are large and high-power. Providing positioning across the United States could require building some of them from scratch or significantly reconstructing old Loran sites. What issues — such as environmental, aviation safety and security — would this raise, and how would you recommend they be addressed?
9. Receivers. Assuming all the above were achieved, it would accomplish nothing unless eLoran receivers were widely purchased, installed and used. How much would that cost? Who would pay? Should we assume that “if we build it, they will come”?
10. Alternatives. Given the widespread development of other positioning technologies over the past decade, much has changed since the earlier recommendations for eLoran. How do we know that eLoran is the right investment — or even a needed part of the solution or needed system in a system of systems — for the future of U.S. PNT?
Common threats to GNSS and eLoran could include the following:
1. Cyber attacks. Given that GPS’s OCX is said to be the most cybersecure system built by the U.S. Department of Defense, how would eLoran’s control system be even more cybersecure than OCX, to avoid a common cyber-vulnerability?
2. Physical attacks. Given concerns about possible physical attacks on GPS satellites, which move at multiple km/sec 20,000 km from Earth, would it not be easier to physically attack eLoran transmitters, which are stationary, terrestrial, in remote locations, and hundreds of feet tall and require massive power sources?
3. Space weather. GPS is potentially vulnerable to severe space weather that could damage satellites or temporarily hinder signal propagation from space to Earth. However, severe space weather could also damage the power grid upon which megawatt eLoran transmitters rely. How would eLoran service be protected from the effects of severe space weather, such as a Carrington Event?
Send me your thoughts at the e-mail address below, with “eLoran” in the subject line.
Galileo Second Generation Batch#1A satellites. (Image: ESA).
Successful European Cooperation
Galileo is Europe’s civil global satellite navigation constellation and a major success, being the world’s most precise satnav system and offering meter-scale accuracy to more than two billion users around the globe.
The signature of the Financial Framework Partnership Agreement (FFPA) on June 22, 2021, further strengthened effective cooperation between the European Commission (EC), the European Union Agency for the Space Program (EUSPA), and the European Space Agency (ESA) — key to successfully achieving a crucial EU Space Program component like Galileo in the current EU Multi Financial Framework (2021–2028).
The EC is the program manager, with EUSPA acting as the exploitation manager and ESA as the system development prime.
Stable Service Performance
Galileo continues to deliver excellent service performance every month in a safe, secure and seamless manner. Delivery of Galileo services is managed by EUSPA, as the Galileo service provider, with industrial partner SpaceOpal, the Galileo service operator prime contractor. The performance of Galileo services is independently monitored by the Galileo Reference Center (GRC) and regularly published on the GNSS Service Center (GSC) web portal at www.gsc-europa.eu — both agencies were developed by GMV. The security of the Galileo System is monitored by the Galileo Security Monitoring Centers (GSMC), operated by EUSPA.
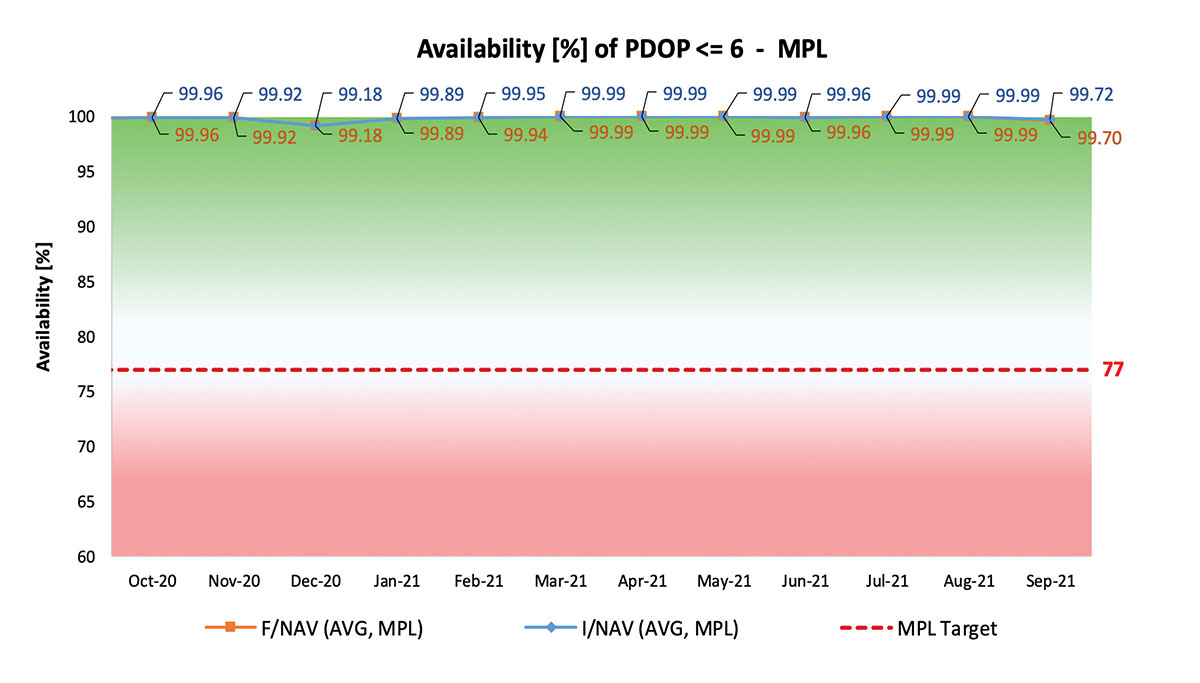
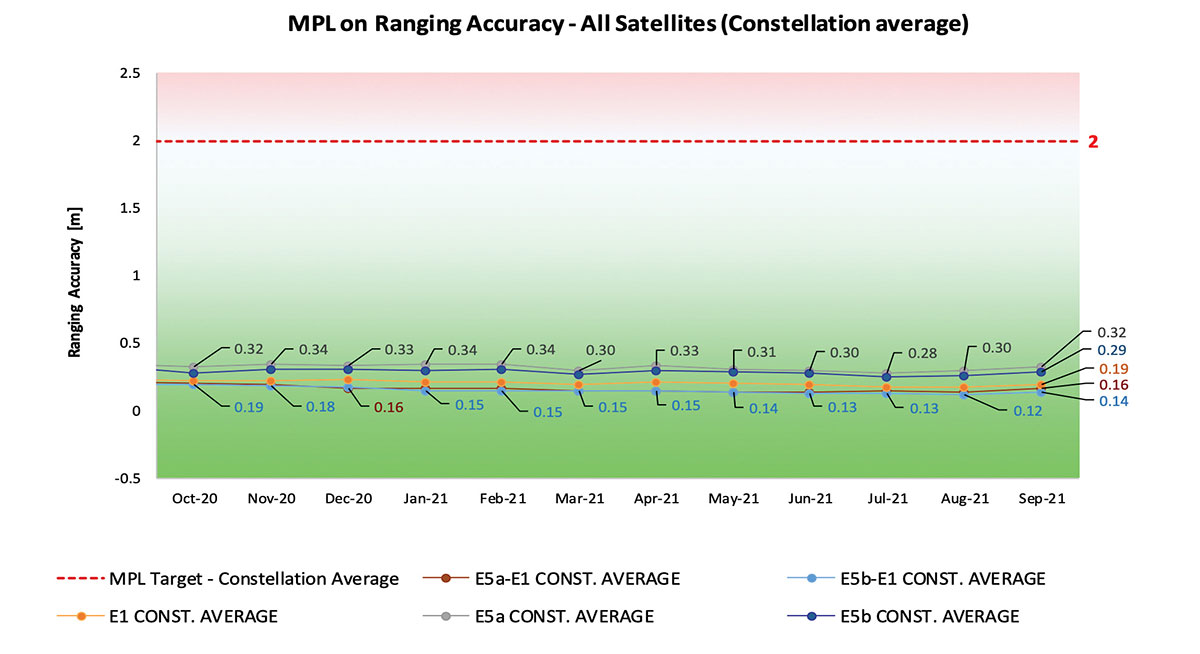
With 22 satellites in service, the open service is already delivering more than 99% availability of PDOP <= 6 worldwide. This, together with the excellent ranging accuracy, suggests that most Galileo dual-frequency users are typically experiencing positioning accuracy in the order of only 2 to 3 meters.
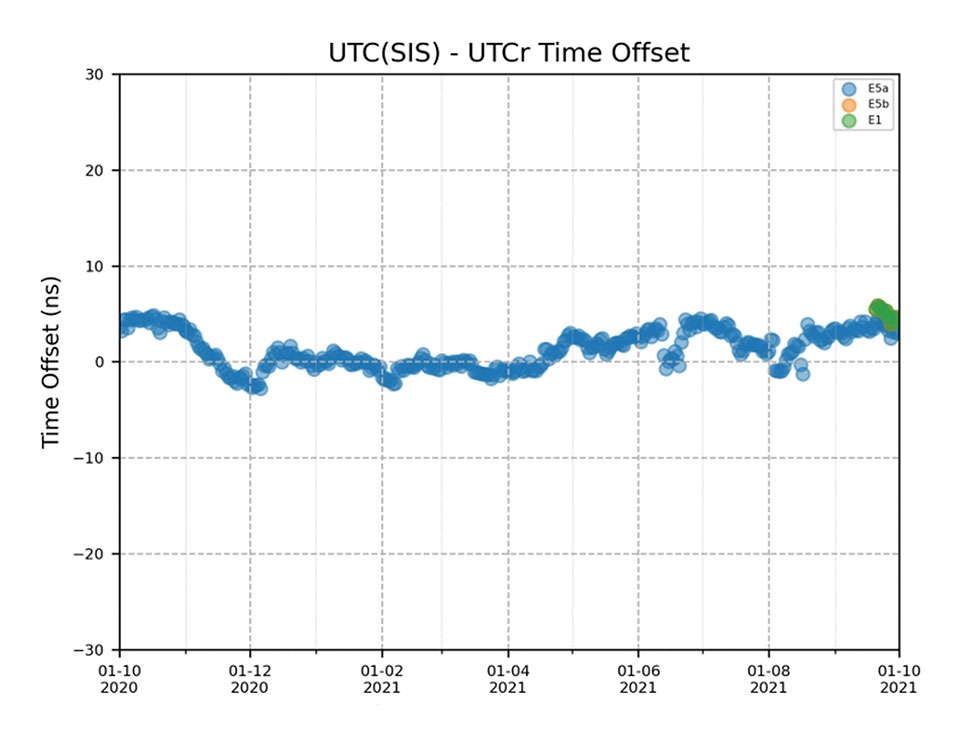
Timing users also continue to receive accurate (in the order of 5 ns) access to Galileo System Time, which they can trace to Universal Coordinated Time (UTC) through the corresponding offset parameters transmitted by the satellites.
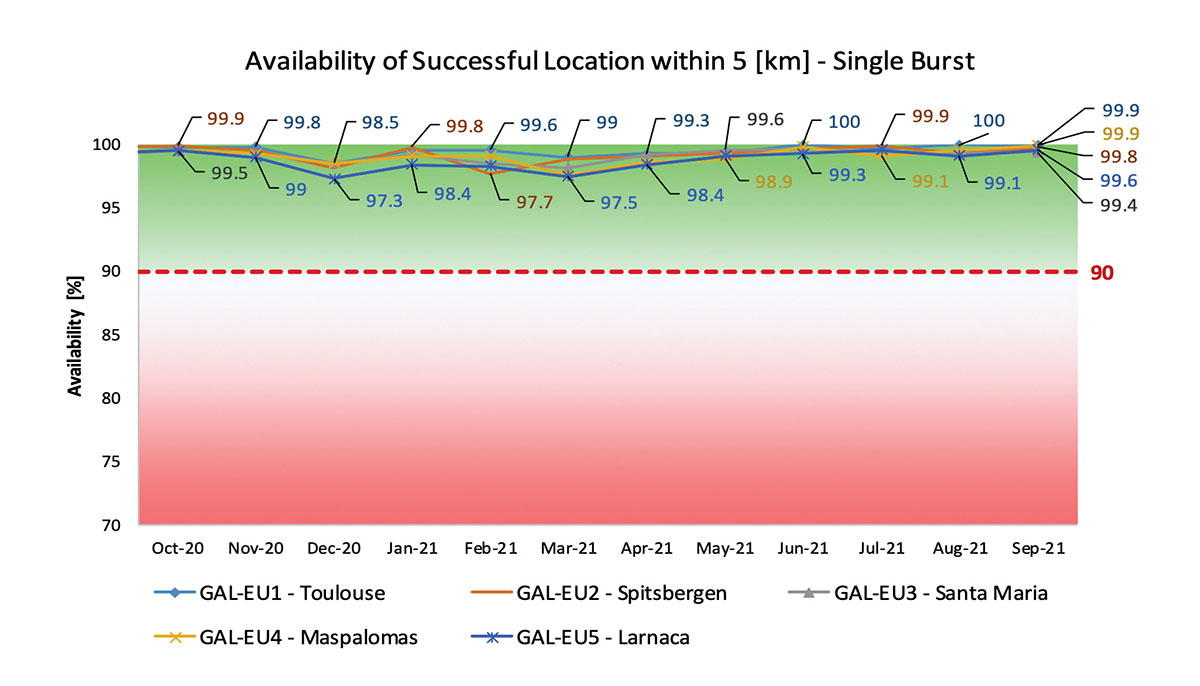
The SAR/Galileo service, contributing to COSPAS/SARSAT, continues to deliver both the Forward Link Service (FLS) and the Return Link Service (RLS) with more than 99% availability, allowing users in distress not only to issue an alert and be located within a few minutes, but also be notified that the alert was successfully processed and rescue is on the way. The SAR/Galileo control center is located in Toulouse (France) and operated by CNES under the authority of EUSPA. The excellent performance of the service has been demonstrated both through several rescue exercises and real-life emergencies.
Performance of Galileo positioning services. (Credit: EUSPA)
Performance of Galileo positioning services. (Credit: EUSPA)
Galileo Launch 11
Soyuz launcher VS-26 lifted off from French Guiana with the first pair of Galileo Batch 3 satellites on Dec. 5, 2021, at 01:19 CET. This marks the 11th Galileo launch of operational satellites in 10 years: a decade of hard work by Europe’s Galileo partners and European industry. With these satellites, the robustness of the constellation has increased, guaranteeing a higher level of service.
Thanks to an upgrade of the Ground Control Segment, the Launch and Early Orbit Phase has been for the first time conducted directly from the Galileo Control Center, rather than requiring an external mission control site. This version of the ground segment increases overall reliability and cybersecurity and opens the way to significant expansion of the Galileo constellation, allowing command and control of up to 38 satellites. The development has been performed by an industrial consortium led by GMV, harnessing state-of-the-art technology using the latest solutions on the market.
Galileo launch 11 from Europe’s spaceport in French Guyana. (Photo: ESA)
On Route to Full Operational Capability
This year will pave the way toward Full Operational Capability of Galileo services.
Industrial prime contractor OHB Systems has nearly completed production of the additional 10 recurrent satellites belonging to Galileo Batch 3. Six of them are undergoing final acceptance testing at the ESA satellite test center, and the other four are under integration at the satellite prime facilities.
Preparation for Launch 12 has already started, with the satellites’ acceptance for a launch date planned in the first months of 2022, followed by Launch 13 in autumn. This is leading toward completion of the Galileo constellation, providing an increased availability of the Galileo signal in space for both GNSS and search-and-rescue users.
Performance of Galileo timing and search-and-rescue services. (Credit: EUSPA)
Performance of Galileo timing and search-and-rescue services. (Credit: EUSPA)
From 2023 onward, the remaining Batch 3 satellites will be launched with the new Ariane 62 launch vehicle, a variant of Ariane 6 with two strap-on solid boosters. The launcher is undergoing the final stages of development, led by prime contractor ArianeGroup.
The Galileo Ground Mission Segment will undergo a complete technological refresh, including hardware virtualization and porting of several million lines of code, performed by an industrial consortium led by Thales France. A series of improvements will be introduced to increase system resilience, including an extended mode of operation to improve service continuity and robustness.
Cybersecurity monitoring of all the ground assets will be introduced as an overlay to the current ground infrastructure. The upgrade will undergo a rigorous level of qualification testing followed by worldwide deployment in a seamless way in both Galileo control centers, in both Galileo security monitoring centers, and at all remote locations without affecting continuity of service.
The service facilities that contribute to the delivery of Galileo services (the European GNSS Service Center, the Galileo Reference Center, and the SAR data service providers) will also evolve to support not only the transition from Initial Services to Full Operational Capability, but also the early roll-out of service evolutions. In this regard, extensive work is ongoing to deliver an exciting set of improvements, some of which are already in development or testing, to reach the users in the year to come:
Improvements of the I/NAV signal to increase robustness and time-to-first-fix, while assuring full backward compatibility with legacy receivers.
OS Navigation Message Authentication (OS-NMA) to support applications that require trust in the authenticity of the data transmitted by the Galileo satellites (a public observation campaign was launched in November 2021 to engage stakeholders and collect their feedback before moving to the initial service provision).
An initial phase of the High Accuracy Service, delivering corrections in the Galileo E6 signal and over terrestrial network to allow users to perform precise point positioning over Europe; test signals were already transmitted with promising results.
A Search and Rescue Beacon Command Service complementing the SAR Return Link, providing improved capabilities to timely locate beacons under authorized emergency situations (such as the disappearance of Flight MH370 in the Indian Ocean in 2014).
A first implementation of an Emergency Warning Service over Europe, allowing the authorized national emergency-management authorities of the EU Member States to relay alert messages through Galileo signals, which can reach target areas even in case of disrupted terrestrial communications (such as due to floods or earthquakes).
Galileo worldwide ground segment. (Credit: ESA)
Second Generation in the Making
The FFPA will bring Galileo to the next level with the development of the second generation, a further step forward with the use of many innovative technologies to guarantee the system’s unprecedented precision, robustness and flexibility.
In parallel to the completion of the first generation of Galileo, Europe has conducted in recent years preparation activities for the Second Generation (G2). Elaborating on market, user and exploitation needs collected by EUSPA, ESA identified a number of system evolution scenarios, which were discussed among relevant EU stakeholders to select the second-generation mission and services baseline to build the system infrastructure.
The evolution of Galileo capabilities will not only provide better services through advanced technical solutions identified by ESA, but will also ensure continuity of service and backward compatibility for
first-generation legacy users.
Two parallel contracts to develop and manufacture each of the six Galileo Second Generation Batch#1 satellites were kicked off in the first half of 2021 with Thales Alenia Space (Italy) and Airbus Defence & Space (Germany). The new G2 satellites will be constructed on a short time scale, with their first launch via Ariane-62 expected in less than four years, allowing them to commence operations in space as soon as possible. Both contracts have already undergone preliminary design reviews.
Development of the G2 satellites is supported by the Galileo Payload Test Bed, which provides an early proof-of-concept of the advanced G2 payload architecture. These satellites will provide, among others, the following key innovations:
Reconfigurable fully digital navigation payload.
Point-to-point connection between satellites by Inter-Satellite-Link for command and control and ranging functionalities.
Electric propulsion for orbit-raising capabilities.
Advanced jamming and spoofing protection mechanisms to safeguard Galileo signals.
System and Ground Segment definition studies, together with the associated technology pre-developments, have been performed, leading to the definition of the preliminary design and technical requirement baseline for the G2 system, a project involving most of Europe’s space industrial partners.
The G2 In-Orbit Validation Ground Segment and System Test Bed have been defined and relevant procurement procedures are ongoing, with these objectives:
G2 Batch#1 satellites launch and early orbit phase, in-orbit testing and enhanced legacy services provision.
G2 new capabilities in-orbit validation, including prototyping and validation of all the novel technologies that can exploit the full capabilities of the G2 Batch#1 satellites.
Galileo Second Generation Batch#1B satellites. (Image: ESA).
Definition activities for the G2 Initial Orbit Capability (IOC) are progressing well and are expected to converge in the first half of 2022, in order to establish the future roadmap for new G2 services provision in the years to come.
2022 will be a key year for the evolution of Galileo Second Generation activities, through the consolidation of the first batch of G2 satellite design and development activities and the start of development of associated G2G IOV Ground Segment and System Test Beds.
A bright future awaits Galileo, both through the completion of its Final Operational Capability and the start of evolution towards Galileo Second Generation.
Guerric Pont is Galileo Exploitation Program manager for the European Union Agency for the Space Program (EUSPA).
Marco Falcone is Galileo First Generation Project manager for the European Space Agency (ESA).
Miguel Manteiga Bautista is Galileo Second Generation Project manager for the European Space Agency (ESA).
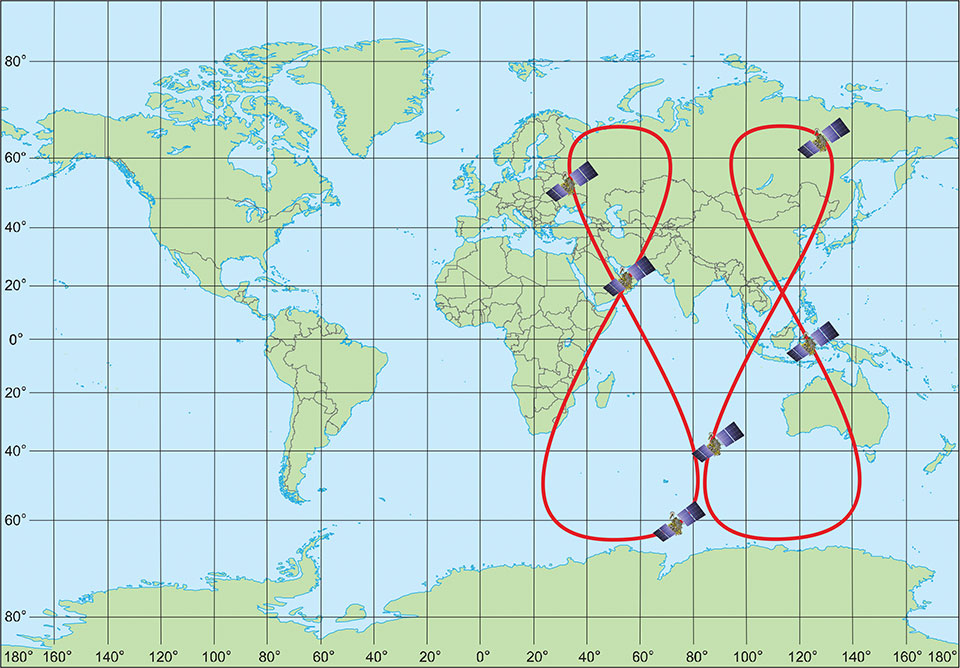
Figure 1. GLONASS high inclined space complex. (Image: Institute of Navigation Technology JSC)
The digital transformation of the global economy requires precise time synchronization and valid object position information. Global navigation satellite systems (GNSS) are the most accurate tool for such tasks.
This year will be 40th anniversary of the launch of the first GLONASS satellite, and we see that the quality of navigation services is driven by the characteristics of today’s satellite navigation signals.
The first fourth-generation Glonass-K2 #13L satellite is scheduled for launch in 2022. It will broadcast a full ensemble of navigation signals — both Frequency Division Multiple Access (FDMA) signals in the L1 and L2 bands and Code Division Multiple Access (CDMA) signals in the L1, L2 and L3 bands. This long-awaited launch will cap a 10-year effort and begin to provide a new platform by broadcasting all the CDMA signals through a single antenna array on the satellite’s geometric axis.
The FDMA antenna array is displaced by 0.9 m from this axis, but this arrangement is done on only two satellites. The next Glonass-K2 satellites, which will be launched beginning in 2024, will have a single antenna array for all navigation signals.
The final second-generation Glonass-M satellite, scheduled to be placed in orbit next year, will provide services by open FDMA signals in the traditional bands at 1.6 GHz and 1.25 GHz. This satellite will be the seventh Glonass-M vehicle able to broadcast GLONASS L3 CDMA signals. There are only two Glonass-K satellites broadcasting this signal now, but more satellites with such a signal will be activated by the end of testing of the GLONASS modernized ground control facility.
We expect the number of satellites able to provide this service to increase by two per year as we replace Glonass-M satellites with Glonass-K and Glonass-K2 satellites.
As of this writing, 15 satellites (62% of the constellation) are working past their guaranteed life times, limiting our ability to increase the system’s accuracy. For the last decade, the signal-in-space range error (SISRE) was 1.4 m, despite the fact that newly launched satellites provide a SISRE of about 0.8 m.
Glonass-K satellites will be launched to maintain the orbit constellation within the next three years, and the accuracy of their signals will be the same or even better. These satellites have a single antenna array for all three bands and could broadcast either FDMA or CDMA signals.
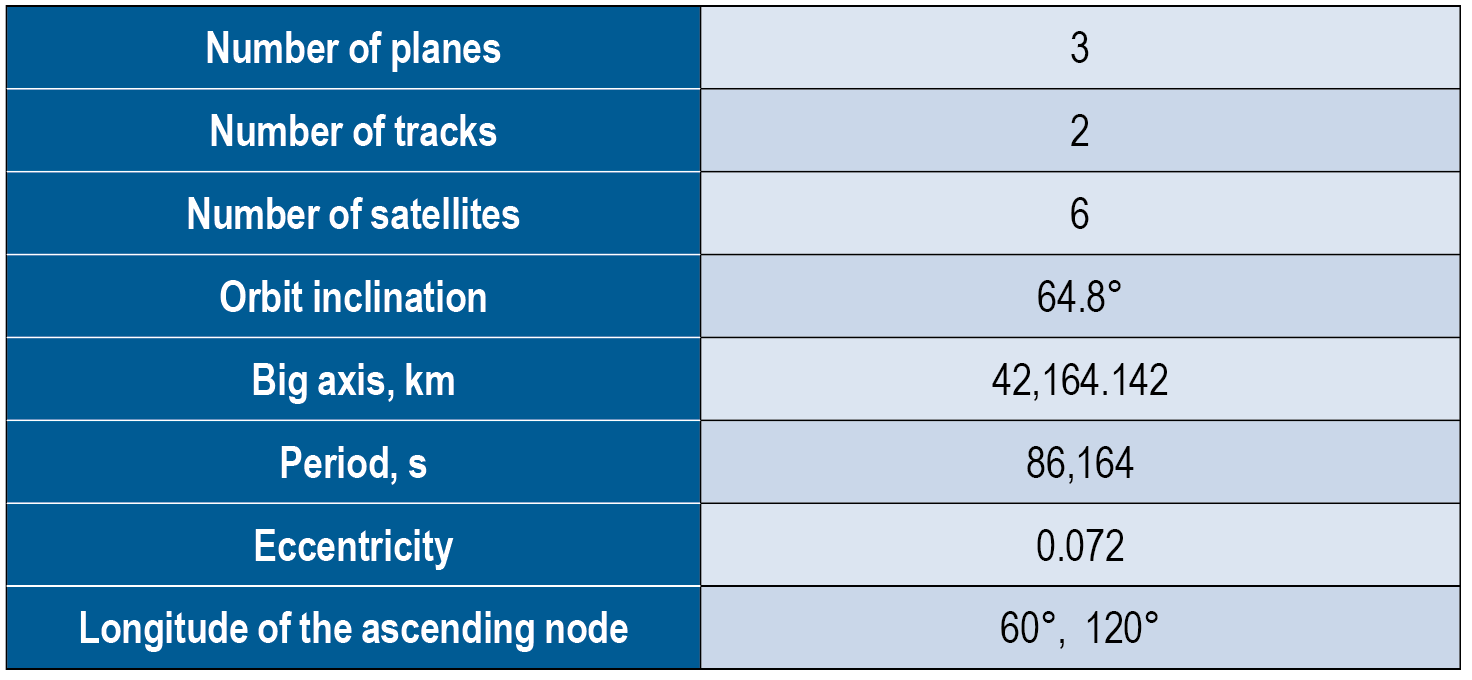
In 2022, the constellation orbits will increase to six satellites in three planes, as we aim to increase the navigation service accuracy and availability (FIGURE 1). See TABLE 1 for satellite orbit parameters. This constellation will make it possible to increase navigation accuracy in the Eastern Hemisphere by about 25% through decreasing the value of the geometric factor.
Additionally, this will greatly improve the availability of the GLONASS navigation service in difficult conditions, such as locations where current users can only receive navigation signals from satellites at least 25° above the horizon. New constellation satellites will be based on the Glonass-K platform, which has passed in-orbit qualification and proved it can provide SISRE at 0.3 m. The preliminary design proved that satellites on this platform could provide an in-orbit SISRE below 0.4 m with standard cesium on-board clocks. This signal-in-space accuracy level with valid ionospheric and tropospheric model data from the navigation signal will allow users to receive a position determination error below 2 m in the plane. Navigation services from these satellites will be provided by the CDMA signal in three frequency bands.
The new satellite will weigh about 1,000 kg and be launched into orbit from both Russian spaceports (northern Plesetsk and eastern Vostochny) by the highly reliable Soyuz-2 rocket. The first launch is scheduled for 2026.
One of GLONASS’ important tasks is to transmit the UTC (SU) national time scale to consumers. Over the past few years, significant results have been achieved in this area.
A complex of high-precision measuring instruments to compare the national coordinate timescale UTC (SU) with the GLONASS timescale was put into operation. These instruments include a transported quantum clock that provides timescale storage with an uncertainty of no more than 1 ns at an observation interval of one day, and with a transportation time of no more than 12 hours. It also provides duplex comparisons of timescales, comparing objects with the permissible uncertainty of ±1.5 ns.
Timescale storage complexes of secondary and working standards of time and frequency VET1-5 (Irkutsk), VET 1–19 (Novosibirsk), VET 1–7 (Khabarovsk) and RET1-1 (Petropavlovsk-Kamchatsky) were modernized and put into operation, providing an overall uncertainty of 3 · 10-15 and with a maximum permissible shift of the timescale of the complex relative to the national timescale UTC (SU) of ± 10 ns.
An optical ground-based frequency reference on cold strontium atoms was developed with an uncertainty of reproduction of the frequency unit and time of no more than 1 · 10-17 .
A keeper of time and frequency units was developed on the basis of a “fountain” of rubidium atoms having a frequency instability of no more than 2 · 10-16 for equipping the standards of time and frequency units and subsequent transmission of more accurate time-frequency information to precision ground and onboard equipment and GLONASS systems.
A developmental prototype of the national timescale storage complex of the Russian Federation was developed on the basis of a new generation of hydrogen keepers.
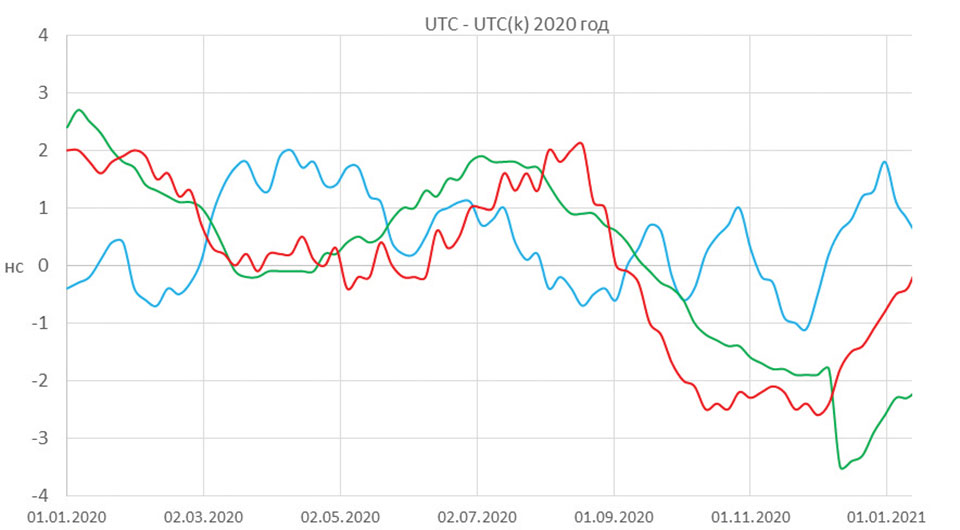
The application of the newly developed technical equipment made it possible to significantly reduce the maximum displacement of the national timescale relative to the International Coordinated Time Scale (UTC), which in 2020 was less than ± 3 ns (FIGURE 2). The UTC (SU) timescale ranks among the best national implementations of UTC, according to the International Bureau of Weights and Measures (BIMP).
Figure 2. Displacement of national timescales relative to Universal Coordinated Time (UTC). (Image: VNIIFTRI FSUE)
Many important events are coming for GLONASS users in 2022. They will improve the user characteristics and lay the foundation for further development of the system.
Sergey Karutin is general designer of the Russian GNSS program GLONASS.
Nicolay Testoedov is CEO of JSC Information Satellite Systems Reshetnev (ISS JSC), a Russian satellite manufacturing company.
Sergey Donchenko is general director of the Federal State Unitary Enterprise, Russian metrological institute of technical physics and radio engineering, VNIIFTRI FSUE.
Yang Changfeng is BeiDou’s Chief Architect. (Photo: BeiDou Navigation Satellite System)
Construction of the BeiDou Navigation Satellite System (BDS-3) has been completed. The system was formally commissioned on July 31, 2020. In 2021, BDS continued to improve performance, expand applications and deepen cooperation, and has achieved sustained, stable and rapid development.
System Performance and Services
Currently, 45 BDS satellites are operational in orbit — 15 BDS-2 satellites and 30 BDS-3 satellites jointly provide seven types of services to users. Specifically, for the entire planet, the system provides three services:
Positioning, navigation and timing (PNT).
Global short-message communication.
International search-and-rescue (SAR) services.
For the Asia-Pacific region, the system provides four additional services:
Satellite-based augmentation.
Ground-based augmentation.
Precise point positioning.
Regional short-message communication services.
The system has been operating continuously and stably since commissioning, with the average value of satellite availability better than 0.99 and the average value of satellite continuity better than 0.999.
PNT Service. As actually measured by the International GNSS Monitoring and Assessment System (iGMAS), the global horizontal positioning accuracy is about 1.52 meters, the vertical positioning accuracy is about 2.64 meters (B1C signal single frequency, 95% confidence), the velocity measurement accuracy is better than 0.1 m/s, and timing accuracy is better than 20 nanoseconds. The performance is better in the Asia-Pacific region.
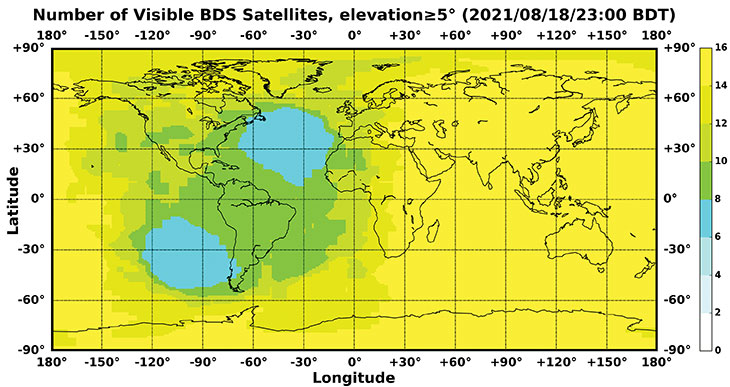
FIGURE 1 shows the number of visible BDS satellites worldwide at BDT 00:00 on Nov. 18, 2021. Among them, the number of visible BDS satellites exceeds 20 in some areas of the Asia-Pacific region.
Figure 1. Number of visible BDS satellites, elevation ≥5° (2021/11/18/00:00 BDT). (CREDIT: www.csno-tarc.cn)
Global Short Message Communication Service. Trial service is provided through 14 medium-Earth-orbit (MEO) satellites for authorized users and low-orbit satellites, with a maximum single-message length of 560 bits, equivalent to about 40 Chinese characters.
Search-and-Rescue Service. A COSPAS/SARSAT-compliant MEOSAR service is provided by six payloads deployed on six MEO satellites. A B2b signal-based Return Link Service (RLS) is provided through 24 MEO and three IGSO satellites, which have completed testing and verification and are in the process of coordination within the framework of COSPAS-SARSAT.
Satellite-Based Augmentation Service. China’s Civil Aviation Administration is organizing satellite-ground integrated test and evaluation, and the positioning accuracy, alarm time, integrity risk and other indicators meet the requirements.
Ground-Based Augmentation Service. Real-time centimeter-level and post-processing millimeter-level services are provided for industrial and public users, based on the regional network reference stations built in China.
Precise Point Positioning Service. PPP signals are broadcast by three GEO satellites. The measured horizontal positioning accuracy is 0.24 m, the vertical positioning accuracy is 0.41 m (95% confidence), and the convergence time is less than 20 minutes.
Regional Short Message Communication Service. The short-message communication function has been tested and verified for integration into public mobile phones; large-scale application is planned.
Development of the Applications Industry
Large-scale applications of BDS have entered a critical stage of liberalization, industrialization and internationalization. The overall output value of China’s satellite navigation and location-based service industry continued to grow in 2020, up to 403.3 billion yuan (US$63.2 billion), which is about 16.9% more than its value in 2019. In terms of BDS-3-enabled basic products, an industrial chain is gradually maturing, comprised of BDS/GNSS basic chips, modules, boards, antennas and other components.
The certification and testing system of basic BDS products has been established and implemented. BDS is already supported by most mainstream chips. BDS is increasingly being integrated into the daily life of the general public. It is becoming the standard configuration for positioning functions of smartphones and other mass-market products.
Smartphone manufacturers such as Xiaomi, Huawei, Apple and Samsung already support BDS. In the first three quarters of 2021, among all types of smartphones applying for online access in China, 72.3% supported positioning function based on BDS, accounting for 93.5% of the total sales volume. The BDS ground-based augmentation function has been introduced into smartphones to achieve high-precision positioning at the 1-meter level; lane-level navigation is being piloted in several cities in China.
In terms of industrial applications, BDS has fully served multiple industries including transportation, public security, disaster relief, agriculture, forestry, animal husbandry and fishing. It has accelerated the integration into electricity, finance, communications and other infrastructure. In particular, in the fight against COVID-19 through scientific and technological approaches, BDS-based precise positioning has facilitated the efficient supply and circulation of anti-epidemic materials.
BDS-based solutions for land rights determination, precision agriculture and smart ports have served the economic and social development of countries in Asia, Eastern Europe and Africa, and BDS-based products have been applied in more than half of the world’s countries and regions.
International Cooperation
BDS has always adhered to the development concepts of openness, cooperation and resource sharing; actively carried out practical international exchanges and cooperation; and contributed to China’s peaceful use of outer space.
Bilaterally, the Eighth Meeting of the China-Russia Project Committee on Major Strategic Cooperation in Satellite Navigation was held in October 2021. Both sides jointly formulated and signed the Roadmap for Cooperation in the Field of Satellite Navigation from 2021 to 2025, providing planning and guidance for China-Russia satellite navigation cooperation in the next five years. Also, China’s Satellite Navigation Office signed a memorandum of understanding on satellite navigation cooperation with the National Committee on Space Activities of the Republic of Argentina and the South African National Space Agency, and formally established a regular cooperation mechanism.
BDS is gradually being integrated into international standards, and is steadily promoting ratification by international standards bodies, including in the civil aviation, maritime, SAR, mobile communications and electrotechnical fields. Several international standards supporting BDS have been released. The Chinese government has drafted a letter of commitment to the International Civil Aviation Organization (ICAO), stating that BDS will provide basic services free of charge to civil aviation users around the world. The International Association of Marine Aids to Navigation and Lighthouse Authorities (IALA) has officially issued a standard that ratifies BDSBAS, so that global marine users can carry out applications based on it. The Third Generation Partnership Project has started the standardization of BDS-3’s B2a and B3I signals. In the detection standard for Indicating Radio Beacon Locator of the Global Maritime Distress and Safety System issued by the International Electrotechnical Commission, BDS receivers and BDS-based SAR services will be supported.
The Chinese government is steadily advancing the rule of law, attaching great importance to and comprehensively promoting the rule of law for satellite navigation. A legal system on BDS has been formed, consisting of national policies, industrial and local policies and regulations, and more. The legislative process of the Satellite Navigation Regulations of the People’s Republic of China has been actively promoted to ensure the healthy, rapid and sustainable development of the satellite industry. In May 2021, China issued a development report on the rule of law of BDS.
Follow-Up Plan
In the future, on the one hand BDS will ensure stable operation, while on the other hand it will focus on the development of backup satellites, and complete the production, state optimization and ground testing of backup satellites. Backup BDS-3 satellites with better performance will be launched as needed to further improve the reliability of the constellation. By adhering to the development concept of “BDS is developed by China, dedicated to the world and aiming to be first class,” carrying forward the BDS spirit of the new era of “independent innovation, open integration, unity of all, pursuit of excellence,” BDS will serve the world and benefit all humankind.
Number of BDS-3 satellites in orbit: 30
Signals broadcast: B1I, B3I, B1C, B2a, and B2b
Yang Changfeng is chief architect of the BeiDou Navigation Satellite System and a Chinese Academy of Engineering academician.
By Francesco Ardizzon, Nicola Laurenti, Carlo Sarto and Giovanni Gamba
To ensure the authenticity of the Galileo navigation messages, the Open Service navigation message authentication (OSNMA) mechanism requires a loose synchronization between the receiver clock and the system time.
To ensure the authenticity and the integrity of the transmitted messages, the Timed Efficient Stream Loss-tolerant Authentication (TESLA) protocol for broadcast authentication requires a loose time synchronization between the transmitter and the receiver — that is, an upper bound to the time offset between their clocks. In the context of the TESLA-based Open Service navigation message authentication (OSNMA) protocol, it is customary to assume that:
On the system side, the transmission is synchronous because the satellites are equipped with high-precision atomic clocks, the drift of which is assumed negligible with respect to those at the receiver side.
At the receiver side, commercial clocks can be found that are less accurate and less stable, which accounts for the substantial time mismatch between the transmitter and the receiver clocks accumulating over time.
To limit the impact of such mismatch on OSNMA operation, it is envisioned that clocks for authenticated tachographs onboard vehicles, such as the ones that will be employed for the position authenticated tachograph for OSNMA launch (PATROL) project, are reset and precisely realigned to system time in periodic workshop visits. However, the clock mismatch must satisfy the OSNMA constraint at all times between successive workshop resets, in the “holdover” period, and through all possible operating conditions, to ensure constant authenticity of the navigation message.
In other contexts, this task is performed by such means as network synchronization protocols.
However, we are considering a scenario where, during holdover, we cannot rely on other sources, such as an internet connection or other devices to synchronize with the reference time to assure the authenticity of our time reference and, consequently, of the PVT solution. We also cannot trust any signal received during the holdover period, thus we should not use the PVT solution to synchronize the clock.
Here, we have two goals. First, investigate the causes of the misalignment and frequency deviation in clock generators commonly found on the market for GNSS receivers. Second, relate the clock specification parameters, taken directly from the real-time clock (RTC) device datasheets, the holdover period, and the OSNMA misalignment constraints.
Atomic clocks at ESTEC’s Navigation Laboratory in The Netherlands independently validate Galileo timing performance. (Photo: ESA)
Frequency Accuracy and Stability
Two metrics are usually employed to evaluate the performance of an oscillator.
Clock frequency accuracy is the normalized difference between the frequency output and its nominal value, f0.
Clock frequency stability is the normalized instantaneous frequency deviation from its local mean.
Although devices are characterized in terms of their stability, we are interested in measuring their accuracy y(t)ΔF(t)⁄f0, where ΔF(t) is the instantaneous frequency deviation from f0 at time t. The calibration performed during each workshop reset brings the residual misalignment to a negligible value called phase calibration error. On the other hand, we will later discuss the residual frequency deviation, due to the frequency calibration error.
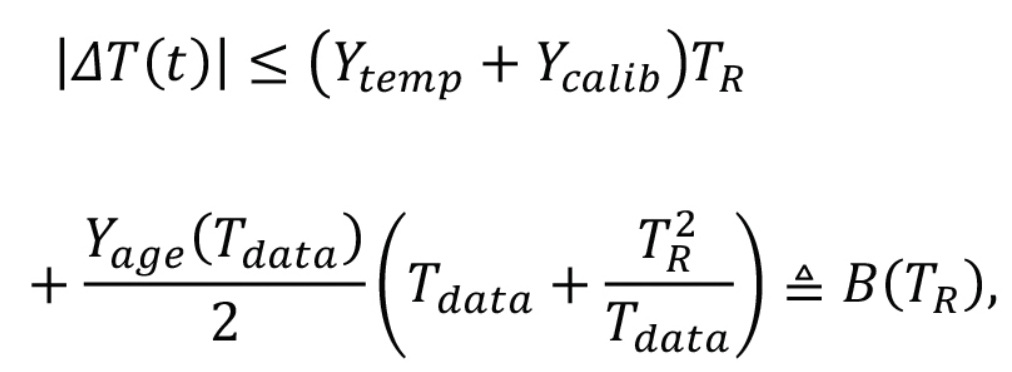
The loose time synchronization requirement TL states that the authenticity of the navigation message received at time t is guaranteed if |ΔT(t)|≤TL, at every t during the holdover period.
Finally, we can relate accuracy and misalignment using the bound
(1)
which allows us to upper bound the clock misalignment at any time t in terms of the frequency accuracy along the whole interval elapsed from the last calibration time t0.
Accuracy Loss for Receiver Clocks
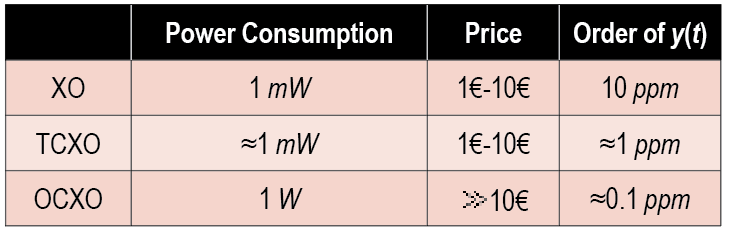
Thanks to their affordable price and wide temperature operating conditions, quartz crystal oscillators are used for clock generation in GNSS receivers (see TABLE 1). We distinguish among simple, temperature-controlled crystal oscillators (TCXOs) and oven-controlled crystal oscillators (OCXOs). GNSS receivers typically employ TXCOs because they offer the best trade-off in terms of power consumption, price and typical accuracy.
Table 1. Summary of the main quartz crystal oscillator characteristics.
Sources of Frequency Accuracy Loss. Quartz crystals are piezoelectric materials, therefore any additional stresses and environmental changes generate an additional voltage, decreasing the clock stability. In the automotive scenario, the main sources of accuracy loss are temperature changes, long-term aging, and the residual calibration frequency offset, while the impact of accelerations, vibrations, gravity variation and supply voltage oscillation can safely be neglected as they result in changes of a few parts per billion.
Currently, no analytic relationship is known between frequency accuracy and temperature for TCXOs (or OCXOs). Therefore, as reported in datasheets, the inaccuracy induced by the temperature changes is bounded by a constant value Ytemp across the whole operating temperature range. This yields a bound on the clock misalignment that increases linearly with the time from the last calibration.
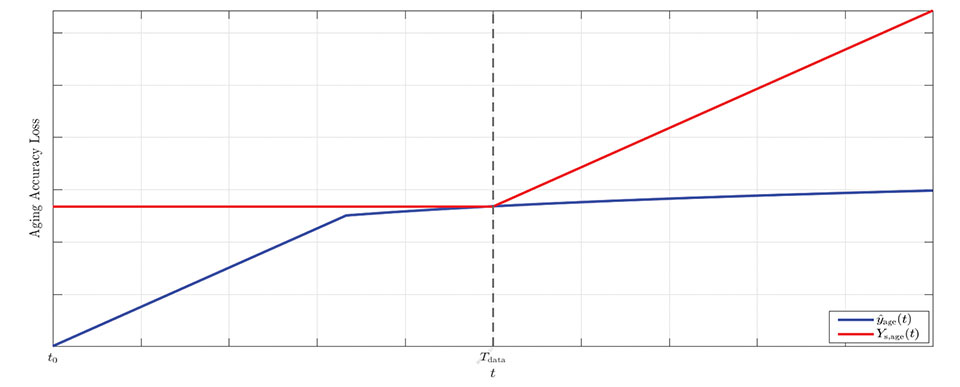
Long-term aging has significant impacts on the clock frequency accuracy and may affect the device even when it is not used for a long time (see Figure 1). A critical aspect of this effect is that it is time-variant, with the accuracy loss increasing over time.
Figure 1. Graphical representation of the model for aging accuracy loss: upper-bound (red) versus estimated model (blue). (Image: R. Filler and J. Vig)
However, datasheets typically report a single value, Yage (Tdata ), which bounds the accuracy at a fixed time Tdata.
The effect of long-term aging for both TCXOs and OCXOs was investigated in a 1993 study by R. Filler and J. Vig measuring the accuracies of oscillator models for several years. The study concluded that a logarithmic fit is better suited for long-term measurements, while a linear fit is better suited for initial measurements (t<30 days) and is a loose upper-bound for longer times. Because we are interested in establishing a prudential upper bound rather than a precise estimate, we use the constant upper bound Yage (Tdata) for all t<Tdata and a linear upper bound for t>Tdata. This leads to a linearly increasing bound on the time offset before Tdata, and a quadratically increasing bound after Tdata.
Finally, the misalignment due to the frequency calibration error accumulates over time. An off-the-shelf oscillator has an initial accuracy that depends on the frequency tolerance ftol. To improve this, a precise calibration is performed, trying to synchronize the RTC with the nominal frequency f0, such as by using PTP. The contribution to the accuracy loss given by calibration can be bounded by Ycalib, a value set a priori either by system design or during the calibration process itself, yielding again a linearly increasing bound on the clock misalignment.
Bound on the Total Misalignment. In general, the cross-correlation between the uncertainties is unknown; we can only consider the worst-case scenario where the total uncertainty is bounded by the sum of the single bounds. This choice represents a prudential and conservative approach that may yield a rather loose bound with very high probability.
Thus, considering that all terms in the clock error bound increase over time, we can bound the total misalignment as
(2)
Example Values from Datasheet Specifications
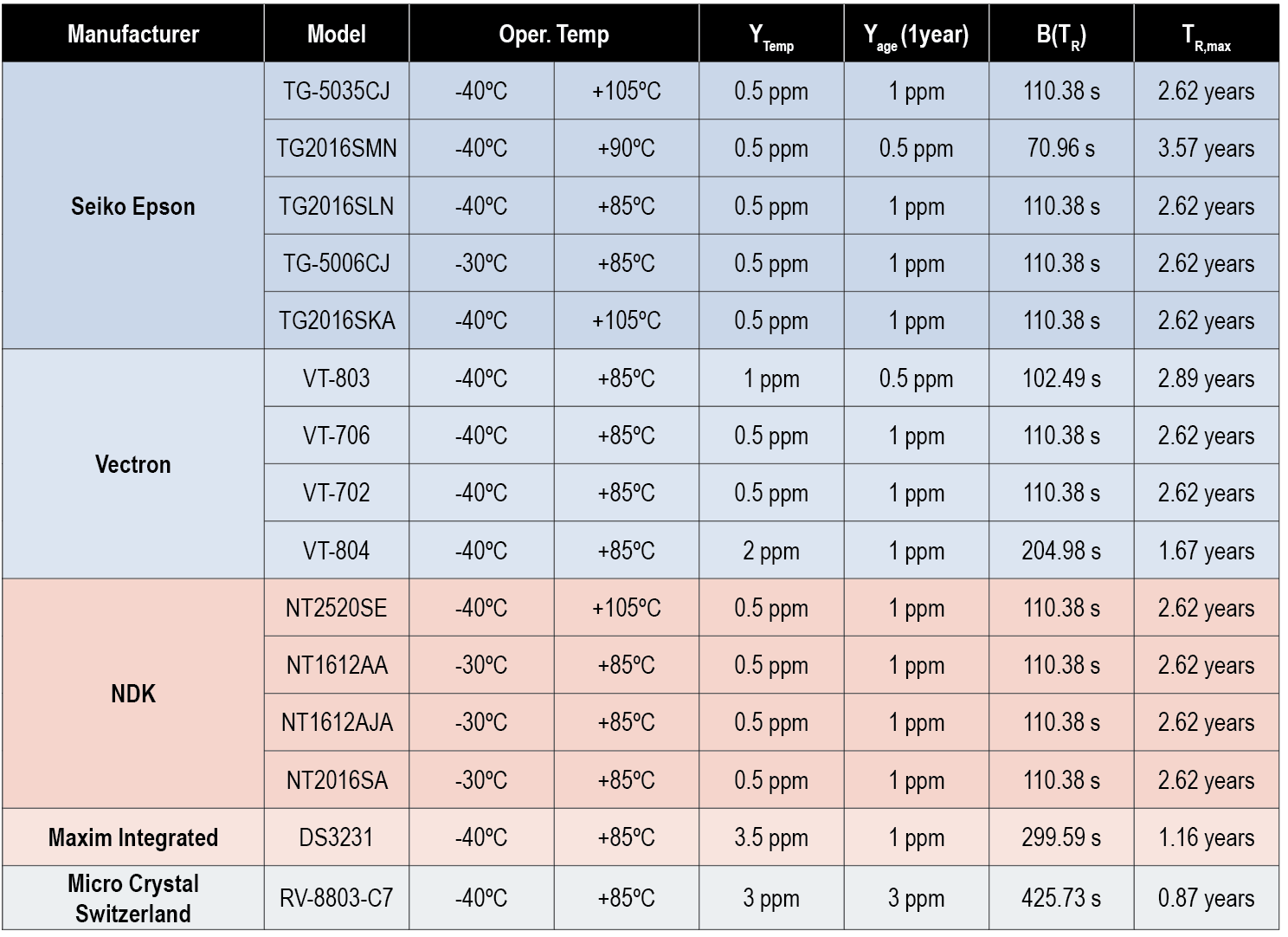
Based on the above result, we can deem a commercial oscillator suitable for OSNMA operation if B(TR )≤TL. We can then compare the requirements for different RTCs, focusing on TCXOs designed for GNSS receivers suitable for the automotive scenario, with f0=52 MHz and a target operating temperature range between –20° Celsius and +85° Celsius. We assume that devices are subject to a calibration process, such that YcalibYtemp; thus we have neglected the calibration accuracy loss. We report in Table 2 the values of the misalignment bound, B(TR ), for TR=2 years and the maximum reset period TR,max such that B(TR,max)≤TL, with a loose time synchronization requirement TL=165s, as computed form the specs found in the datasheets.
Table 2. Bound values B(TR) and TR,max computed using several RTCs’ datasheet specs with TL=165 s and TR=2 years.
Conclusions
To ensure the authenticity of the GNSS navigation message, the Galileo OSNMA protocol requires a loose synchronization between the transmitter and the receiver. The misalignment between transmitter and receiver clock needs to be lower than a threshold TL for the whole holdover period TR. In this article, we have investigated the causes of the misalignment and frequency deviation in clock generators commonly found on the market and defined a general relationship between TL ,TR and the specifications commonly found in datasheets. Finally, we examined several mass-market temperature-controlled crystal oscillator datasheets, evaluating their performance in terms of worst-case offset bound B(TR).
The bound represents a prudential conservative approach and may be rather loose. However, given the lack of a consistent statistical model, this is a reasonable solution. We conclude that most devices can satisfy the constraint B(TR)≤TL=165 s with a workshop reset period of TR = 2 years.
Acknowledgements
This study was conceived within the PATROL (Position Authenticated Tachograph foR OSNMA Launch) project, funded by the EU Agency for the Space Programme through the Fundamental Elements programme, under procurement No. GSA/OP/23/16 “Development, supply and testing of a Galileo open service authentication user terminal (OSNMA) for the GSA.”
The authors acknowledge the invaluable support provided by the PATROL technical team: Davide Marcantonio (Qascom), Fabio Pisoni, Giovanni Gogliettino and Domenico di Grazia (ST Microelectronics), Alexandre Allien and Francois Riou (FDC), Jacques Kunegel (ACTIA), Simón Cancela Díaz and Belén Villanueva Coello (GMV).
PATROL success was fostered by the commitment and support of Flavio Sbardellati (EUSPA Project Officer), Gonzalo Seco Granados and Alexander Rügamer (EUSPA external reviewers), Javier Simon (EUSPA reviewer), Ignacio Fernandez-Hernandez and Giovanni Vecchione (EC reviewers). The authors thank colleagues Giada Giorgi (UNIPD) and Lorenzo Dal Corso (Qascom) for reviewing this work.
The content of this publication does not reflect the official opinion of the European Union or of the EU Agency for the Space Programme. Responsibility for the information and views expressed therein lies entirely with the authors.
Francesco Ardizzon is a Ph.D. student and Nicola Laurenti an associate professor in the Department of Information Engineering of the University of Padova, Italy. Carlo Sarto is the head of the security engineering division and Giovanni Gamba the head of the SIGINT and EW division at Qascom S.r.l., in Bassano del Grappa, Italy.
REFERENCES
A. Perrig, R. Canetti, J. Tygar, and D. Song, “The TESLA broadcast authentication protocol,” RSA CryptoBytes, vol. 5, 11 2002.
I. Fernandez-Hernandez, T. Walter, A. Neish, and C. O’Driscoll, “Independent time synchronization for resilient GNSS receivers,” in 2020 International Technical Meeting of The Institute of Navigation, 02 2020, pp. 964–978.
I. Fernandez-Hernandez, V. Rijmen, G. Seco-Granados, J. Simon, I. Rodriguez, and J. D. Calle, “A Navigation Message Authentication proposal for the Galileo Open Service,” NAVIGATION, vol. 63, no. 1, pp. 85–102, 2016. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10.1002/navi.125
L. Cucchi, S. Damy, M. Paonni, M. Nicola, M. Troglia Gamba, B. Motella, and I. Fernandez-Hernandez, “Assessing galileo OSNMA under different user environments by means of a multi-purpose test bench, including a software-defined GNSS receiver,” in 4th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), 9 2021.
“IEEE standard definitions of physical quantities for fundamental frequency and time metrology—random instabilities,” IEEE Std 1139-2008, pp. c1–35, 2009.
J. Vig, “Quartz crystal resonators and oscillators for frequency control and timing applications – a tutorial,” in IEEE International Frequency Control Symposium Tutorials, 2016.
M. Lombardi, “Fundamentals of time and frequency,” in The Mechatronics Handbook, CRC Press, 01 2002, ch. 17.
R. Filler and J. Vig, “Long-term aging of oscillators,” IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol. 40, no. 4, pp. 387–394, 1993.
W. Riley and D. Howe, Handbook of Frequency and Stability Analysis. Special Publication (NIST SP), National Institute of Standards and Technology, Gaithersburg, MD, 2008-07-01 00:07:00 2008.
“Performance specification: oscillator, crystal controlled, general specification for,” MIL-PRF-55310F, 2018.