With the first Galileo services set to begin this year, the European Space Agency (ESA) is working directly with European manufacturers of mass-market satnav chips and receivers to ensure that their products are Galileo-ready.
“Our objective is to make sure, ahead of the European Union’s declaration of early Galileo services that mass-market devices are ready and able to make use of them,” explained Riccardo de Gaudenzi, head of ESA’s Radio Frequency Systems, Payload and Technology Division.
“In coordination with the European GNSS Agency, we put out an open call to satnav manufacturers offering testing with our laboratory facilities. We have gone on to work with five mass-market chipset makers and a comparable number of professional receivers manufacturers.”
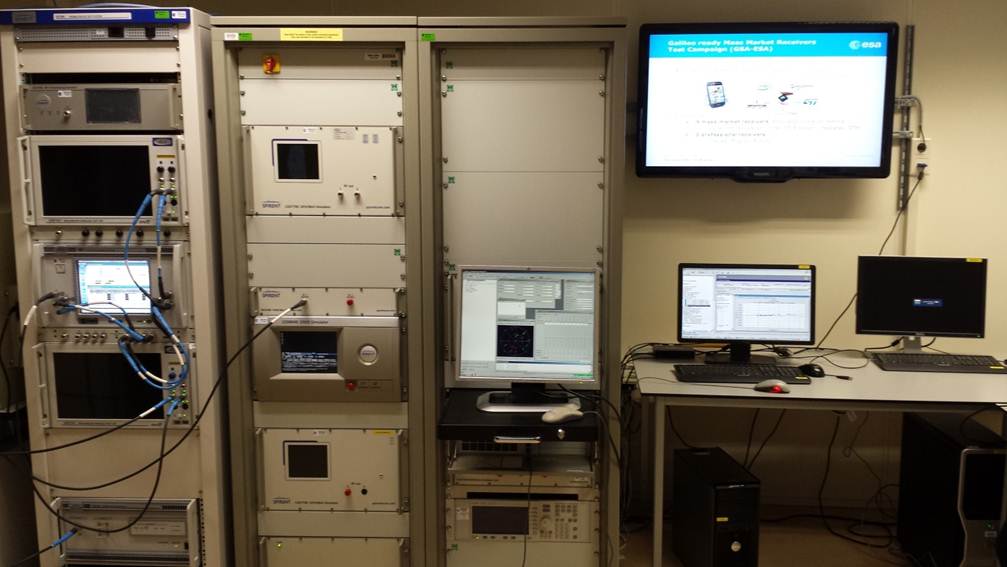
Key facilities being used at ESA’s Navigation Laboratory include its state-of-the-art “hybrid localization solution rack,” where receiver chips can be plugged in. This rack generates simulated constellations of Galileo, GPS and other satnav systems along with Wi-Fi or mobile networks which phone-based satnav chips often additionally employ. It can also simulate inputs from the kind of inbuilt gyro-type devices receivers employ for dead reckoning, to continue positioning measurements when satellites are out of view.
Hybrid localization solution rack.
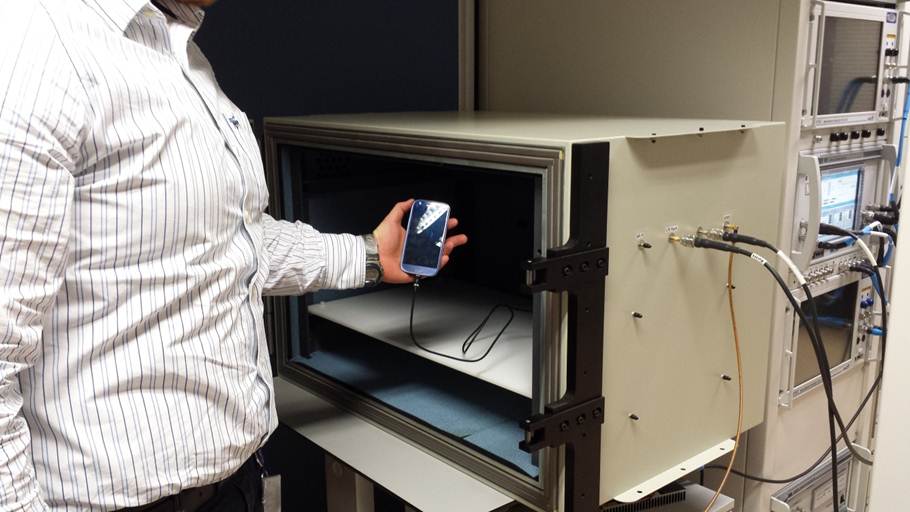
Another resource is the octobox — a mini anechoic chamber into which phones or mobile devices can be placed, to feed them simulated satnav and cellular network signals.
Octobox
Testing in the field is carried out with the Lab’s Telecommunications and Navigation Testbed Vehicle. This fully equipped van carries its own extremely accurate receivers to assess the performance of the consumer items being tested.
Whether they are being used for vehicle navigation, shipment navigation, or precision agriculture, the performance of satnav terminals comes down to the specialized chips embedded within them. The same is true of mobile phones, although their chips tend to be optimized for low-power, high-sensitivity operations.Post
Test vehicle.
“This is a very useful initiative from our point of view, closing the loop between Galileo and industry,” commented Philip Mattos of ST Microelectronics, whose Teseo-2 receiver chips are used in satnavs and embedded in cars.
“Thanks to earlier collaboration with ESA and the EU, the millions of multi-constellation satnav chips we sell annually have been equipped for Galileo signals since 2009. It will take only a software update to enable them to start using Galileo,” Mattos said. “We have worked a lot with simulated Galileo signals, but this cooperation is allowing us to optimize our software based on access to actual signals and background technical information.”
Combining radio frequency and silicon elements, a single 1-cm square chip can detect signals from multiple satellite constellations — Russia’s GLONASS and China’s BeiDou as well as Galileo and GPS — then convert them into precise positioning measurements.
Beamed across thousands of kilometers of space, the signals are incredibly faint, barely distinguishable from background noise. But a technique called correlation gain synchronizes them with copies of each satellite’s broadcast code stored in the chip’s memory to boost them to usable levels.
Data from other systems, such as in-car accelerometers or gyros, can also be fed into the positioning measurements as desired.
For mass-market single-frequency designs, an ESA-created ionospheric model allows the subtraction of ionospheric delays, its performance coming close to dual-signal standards.
Chips also apply stored ephemerides data embedded in satellite signals — updates on where satellites are positioned in the sky — to speed up acquisition times.
The first four Galileo satellites are already in orbit and operational. Over the course of 2014 six more satellites are planned to join them in three separate Soyuz launches. Galileo initial services are scheduled to start by the end of this year.
Delta IV, the current GPS launch vehicle, awaits a date with space at Cape Canaveral.
Launch Delays Ground GPS IIF and Galileo FOC
The scheduled October 23 launch of GPS IIF-5, the fifth in the current “follow-on” generation of GPS satellites, has been postponed in order to complete a review of an adjustment made to the rocket’s upper stage engine. A loss of thrust by a Delta IV rocket upper stage during a GPS launch last year worried the Air Force and the United Launch Alliance (ULA), though the satellite successfully reached its intended orbit.
A subsequent investigation identified a fuel leak in the engine system as the culprit. Two medium Delta IV rockets and one heavy version have launched since then, but ULA said further investigation had produced new information about the engine’s first start.
While no new launch date has been set, the ULA released a statement:
“The ongoing Phase II investigation has included extremely detailed characterization and reconstructions of the instrumentation signatures obtained from the October 2012 launch and these have recently resulted in some updated conclusions related to dynamic responses that occurred on the engine system during the first engine start event.
“The GPS IIF-5 Delta IV launch is being delayed to allow the technical team time to further assess these updated conclusions and improvements already implemented and determine whether additional changes are required prior to the next Delta IV launch.
“The Delta IV booster for the GPS IIF-5 mission has completed the standard processing and checkout on the launch pad and will be maintained in a ready state for spacecraft mate and launch pending completion of this assessment. A new launch date will be established when the assessment of the updated dynamic response information is completed in the coming weeks.”
A Soyuz rocket (right) will carry Galileo FOC satellites, but no sooner than June 2014.
Galileo. Continuing delays in ground testing of the first two fully operational Galileo satellites have postponed their launch to June 2014 at the earliest.
According to European officials, the European Space Research and Technology Centre (ESTEC) thermal vacuum chamber for testing satellites under orbit conditions was not ready for the two FOC satellites delivered by OHB in late summer.
The satellites thus cannot ship to the Guiana spaceport in South America in time for a planned 2013 launch on a Soyuz rocket. The Galileo schedule is also running into bottlenecks with scheduled launches by other satellite programs aboard Guiana Soyuzes.
A six-week test of the first Galileo satellite at ESTEC reportedly got under way in October.
Svalbard station on Spitsbergen in the Norwegian Arctic.
Ground Network Supports Galileo for SAR
Completion of a pair of European Space Agency dedicated ground stations at opposite ends of that continent has enabled Galileo satellites in orbit to participate in global testing of the Cospas–Sarsat search and rescue system.
The Maspalomas station, in mid-Atlantic Canary Islands, was activated in June. In September, the Svalbard site on Spitsbergen in the Norwegian Arctic activated. The two sites can now communicate and will soon undertake joint tests.
The International Cospas-Sarsat Programme is a satellite-based search and rescue (SAR) distress alert detection and information distribution system, established by Canada, France, Russia, and the United States, with participation by 33 other countries.
Activation of the two new stations enables participation of the latest two Galileo satellites in a worldwide test campaign for Cospas-Sarsat expansion.
The program is introducing a new medium-orbit SAR system to improve coverage and response times, with the Galileo satellites in the vanguard.
The second pair of Europe’s Galileo satellites — launched together in October 2012 — are the first of the constellation to host SAR payloads. These can pick up UHF signals from emergency beacons aboard ships or aircraft or carried by individuals, which are then relayed to ground stations. There, the source is pinpointed and automatically passed on to a control center, which then routes it to local authorities for rescue.
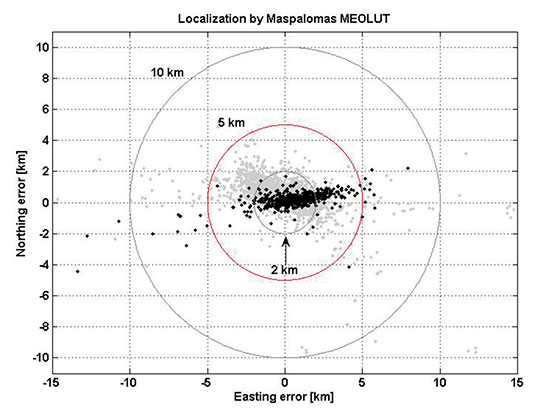
“The Galileo satellites, tested in combination with the same SAR payloads on Russian GLONASS satellites as well as compatible repeaters on a pair of U.S. GPS satellites, showed an ability to pinpoint simulated emergency beacons down to an accuracy of 2–5 kilometers in a matter of minutes,” explained Igor Stojkovic, ESA Galileo SAR engineer.
“Our in-orbit validation tests so far have been in line with expectation and beyond, giving us a lot of confidence in the performance of the final system, once completed. And using a combination of satellites is just how the upgraded system will operate in practice, in order to localize distress signals.”
Localization test performed from Maspalomas MEOLUT as part of Galileo’s SAR in-orbit validation. Beacon locations obtained with four satellites are shown in black, while those using three satellites are shown in grey. More than 93 percent of all beacon locations, after only a single beacon burst has been received, are within the required five kilometers from actual beacon position.
System Briefs
GLONASS Seeks UK Ground. According to the website of the Russian magazine GLONASS Messenger, the Russian Federal Space Agency communicated its proposals for specific areas in the United Kingdom (or, more likely, its territories) to accommodate stations of the GLONASS System for Differential Correction and Monitoring (SDCM). Apparently, an offer was made by the deputy head of Roscosmos, Oleg Frolov, in discussions with David Parker, the director of the British Space Agency. The desired locations for the stations will not be disclosed until the approval of their establishment by the British side, the website reported.
Head Rolls. After repeated satellite launch failures and rumblings about embezzlement and corruption within the Russian space program Roscosmos, Vladimir Popovkin was let go as director and replaced by Oleg Ostapenko, a colonel general in the Russian Military, deputy minister of Defence, and former commander of the Aerospace Defence Forces. The Russian government also announced formation of new agency, the United Rocket and Space Corporation, to manage satellite and rocket manufacturing facilities heretofore supervised by Roscosmos.
Navigation Support Office Provides Services for IGS and Users
By Werner Enderle, Loukis Agrotis, Rene Zandbergen, Mark van Kints, and Jens Martin
The European Space Operations Centre has taken on the roles of real-time analysis center, data provider, and analysis-center coordinator for the International GNSS Service’s Real-Time Service, providing a number of products combining data streams from multiple sources.
The Navigation Support Office of the European Space Agency’s Space Operations Centre (ESA/ESOC) in Darmstadt, Germany, has for the last decade been involved in activities related to the provision of real-time GNSS augmentation services. The motivation for these activities is to support a number of ESA objectives, including:
Orbit determination support for low-Earth orbit missions using GNSS;
Development and validation of operational capabilities, with an emphasis on Galileo;
GNSS infrastructure development, including advanced techniques for better exploitation of the European GNSSs, Galileo, and EGNOS;
Research, development, and support to European industry through technology transfer.
The concept adopted is the generation of precise GNSS orbits using state-of-the-art batch orbit-estimation software. The predicted orbits, accurate to a few centimeters, are used in a Kalman filter, operating in real time, to estimate precise corrections to the satellite clocks from GNSS observations received from a global real-time receiver network. The orbit and clock products can then be made available to users with a latency of 3–4 seconds from the observation epoch.
The software architecture is modeled after concepts used in satellite control centers with the real-time observation and product streams treated in the same way as satellite telemetry data. A concept of circular history files has been developed, combining seamless real-time processing and retrieval capabilities with the ability to archive data for historical playback. Extensive display and visualization capabilities are also available.
Participation in the International GNSS Service (IGS) Real-Time Pilot Project has enabled validation of the ESOC software, with continuous operation and monitoring of two solution chains, starting in 2008. As the IGS Real-Time Analysis Center coordinator, ESOC has developed and operates a real-time combination solution, combining streams from multiple sources, as an offering of the IGS Real-Time Service, formally launched in April 2013.
GNSS Infrastructure
The ESOC software infrastructure modeled after real-time satellite control systems includes many of the elements for data processing, archiving, and visualization that are common to such systems. In particular, it implements a specially designed circular filing system for streaming data, allowing maintenance-free operations for processing and archiving of data and products, and seamless transitions from historical to live data processing. Additionally, it includes a highly sophisticated job scheduler for automating operations and an integrated events and alarms monitoring system.
The software subsystems belong to one of three functional categories:
Infrastructure. Software is written in C++. The main components are middleware elements for history filing and event logging and a job scheduling application. All middleware elements have C++, Java, and FORTRAN interfaces.
Algorithmic. Software is written in FORTRAN 90, C++ or Java. It incorporates applications for real-time and batch data processing and estimation and for generation of products and comparison statistics between results sets.
Visualization. Software is entirely written in Java for portability. It includes real-time graphical and alphanumeric display applications and the graphical user interface.
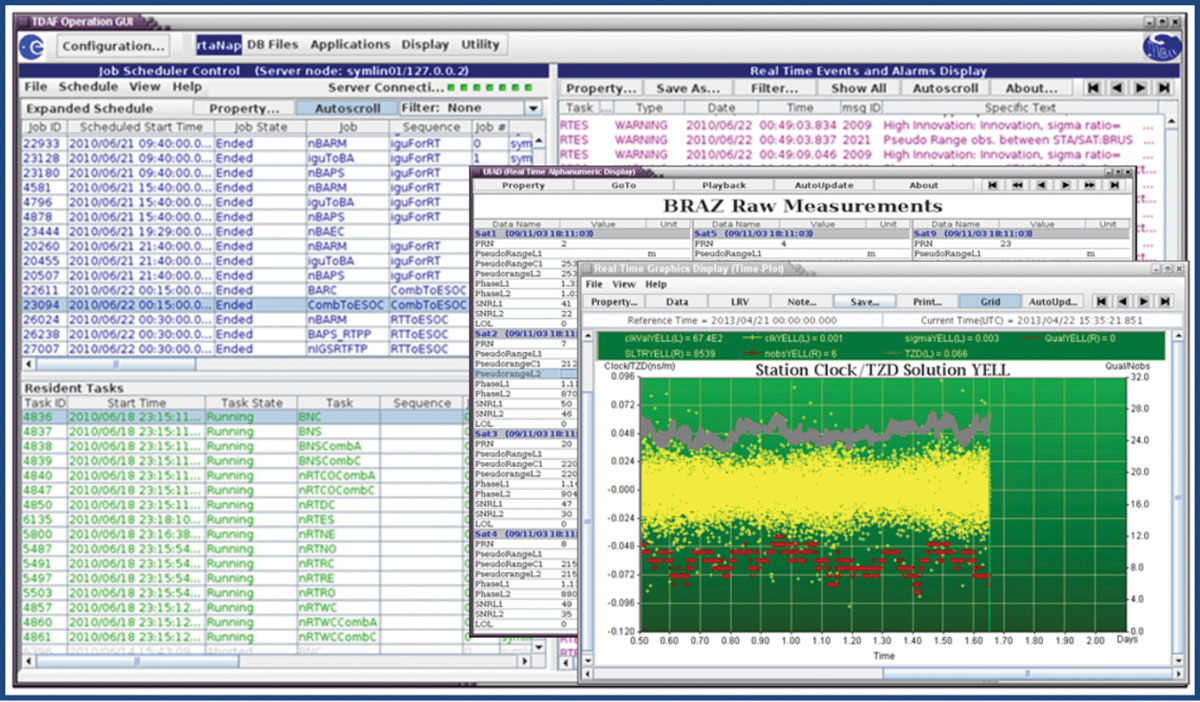
Figure 1 shows the integrated desktop that provides all the functions for software configuration, monitoring, and control. Also shown are examples of graphical and alphanumeric displays. The integrated desktop combines the job scheduler display (left side) with the events display (right), allowing the operator to easily monitor the status of all running batch and real-time applications.
Figure 1. Real-time processing desktop and sample displays.
The job scheduler is configured to submit all batch jobs at pre-defined times or intervals, and to monitor the real-time applications. The batch orbit determination function is typically executed every two hours and includes jobs for screening and processing observations from up to 80 stations. The predicted orbits from these runs are updated to provide the most recent information to the real-time estimation.
The job scheduler also acts as a watchdog to ensure that all real-time processes (resident tasks) are continuously running. Any abnormal termination is detected, and the relevant task is restarted automatically. This can also guard against hardware failures, because tasks can be configured to run on more than one hardware node and will be restarted on a backup node if the prime fails.
Resident tasks are used for processing and filing observation and broadcast ephemeris messages and for performing the real-time estimation. The real-time estimation processes phase and pseudorange observations arriving at the rate of 1 Hz and screens the data to detect outliers and cycle slips. It uses a Kalman filter to estimate multi-GNSS satellite and receiver clock corrections, tropospheric zenith delays at each observing site, and phase biases for each satellite-receiver link. The estimation interval is user-configurable and is currently set at 5 seconds. The estimated satellite clock corrections and predicted orbit information are sent to an output stream and disseminated to users in the form of RTCM SSR messages.
The software capabilities were originally designed to support the GPS constellation. These capabilities have now been extended to support all the available GNSS constellations, with emphasis on Galileo. In addition to multi-constellation, the capability of multi-frequency processing has been added.
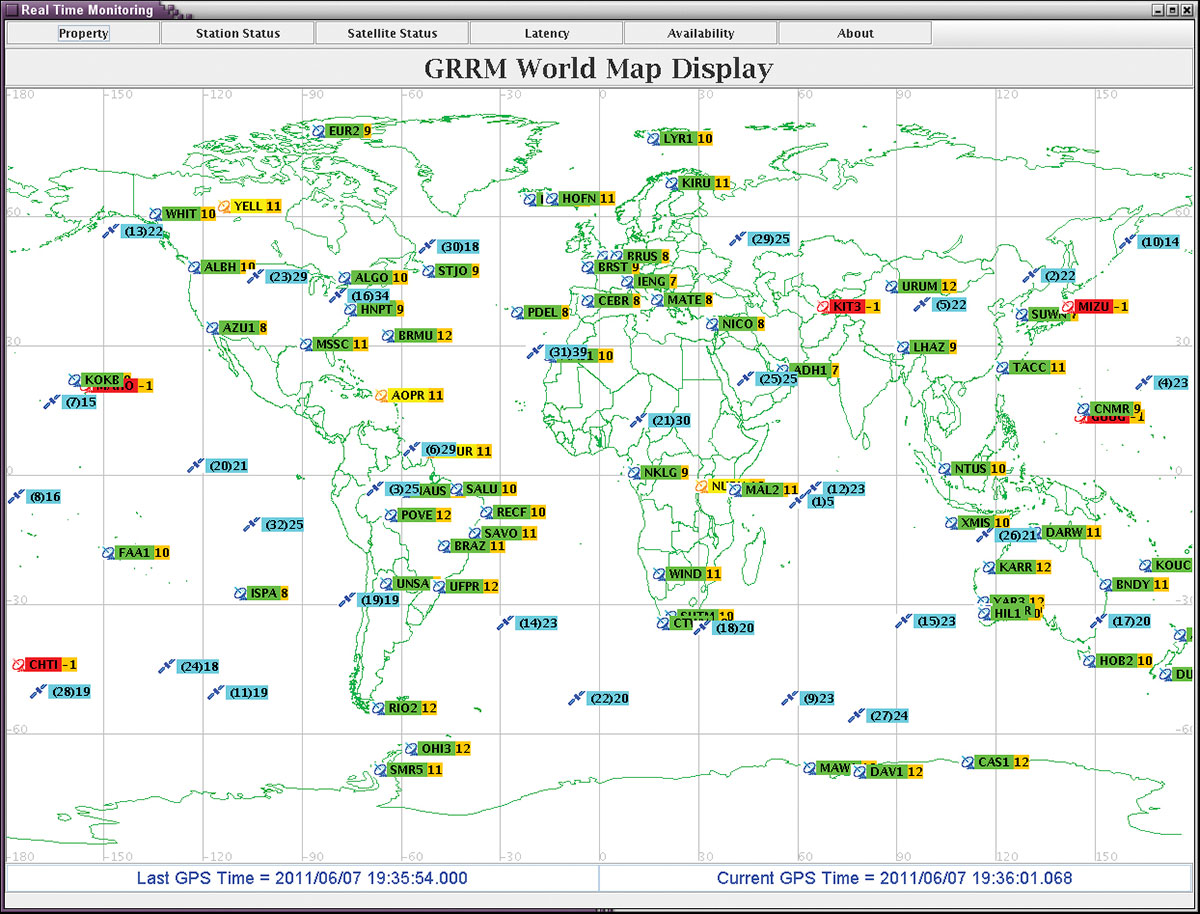
A network status monitoring display in the form of a world map (see Figure 2) gives the operator an overview of the network data flow. Station and satellite icons are color-coded to reflect the health of the live data links. It is also possible to see the number of live links to each station or from each satellite and the data latency and percentage availability of the observations from each station.
Figure 2. GNSS network status monitoring display (GPS-only).
To supplement the investment in software, ESOC has maintained and expanded the capabilities of its receiver network. This takes advantage of the existence of a number of ESA-operated satellite tracking sites with the necessary infrastructure (power, communications, atomic frequency standards, concrete pillar for mounting of the GNSS antennas) to host GNSS equipment with minimal additional operating costs. All ESA sites are now equipped with multi-GNSS capability receivers and associated antennas. Additional sites are also being procured with the objective of creating an independent network of around 30 sites with global coverage.
Real-Time Activities, Projects
The investment in GNSS software, equipment, and infrastructure has enabled ESA to participate in a number of projects with institutional and commercial partners.
As a major contributor to the IGS, ESOC has been a strong supporter of the IGS Real-Time Pilot Project. Since the original call for participation, and through to the establishment of the recently launched (April 2013) IGS Real-Time Service (RTS), ESA has played a leading role by assuming the roles of real-time analysis center, data provider, and analysis-center coordinator. In the latter role, ESOC is responsible for the generation of the RTS products and has been generating and disseminating IGS real-time combination streams after processing the real-time solutions from up to 10 analysis centers. Included in these solutions are two streams generated by the ESOC Real-Time Analysis Center. One of these uses orbit information generated by the NAPEOS software (ESOC’s Navigation Support Office standard software package for precise orbit determination), which provides orbit updates every 2 hours. The second ESOC solution stream uses the IGS rapid orbit product, which is updated every 6 hours.
Stemming from the recognition that real-time services rely on the development of standards and data formats, ESOC has been instrumental in aligning the interests of the IGS community with those of the Radio Technical Commission for Maritime Services (RTCM). ESOC, along with NRCan, represents the IGS at RTCM meetings. Over the last 4–5 years, this forum, which brings together GNSS service providers, users, and receiver manufacturers, has made significant progress in agreeing on standards for:
real-time orbit and clock correction messages in state space representation (SSR) format;
new multi-GNSS standards for real-time high-precision observations and for broadcast ephemeris dissemination.
ESOC also represents the RTCM at the Galileo Geodetic Reference Interface Working Group, a group of experts advising the EC on exploitation of Galileo services for the geodetic community.
In its mandate to assist European industry, ESOC has been working with Fugro for software development related to the implementation of high-precision augmentation services. The Fugro G2 service, providing augmentation products for GPS and GLONASS, uses software developed by ESA and has been operational since early 2009. The service is being extended to include Galileo, with successful trials already demonstrated by Fugro.
Capabilities and Performance
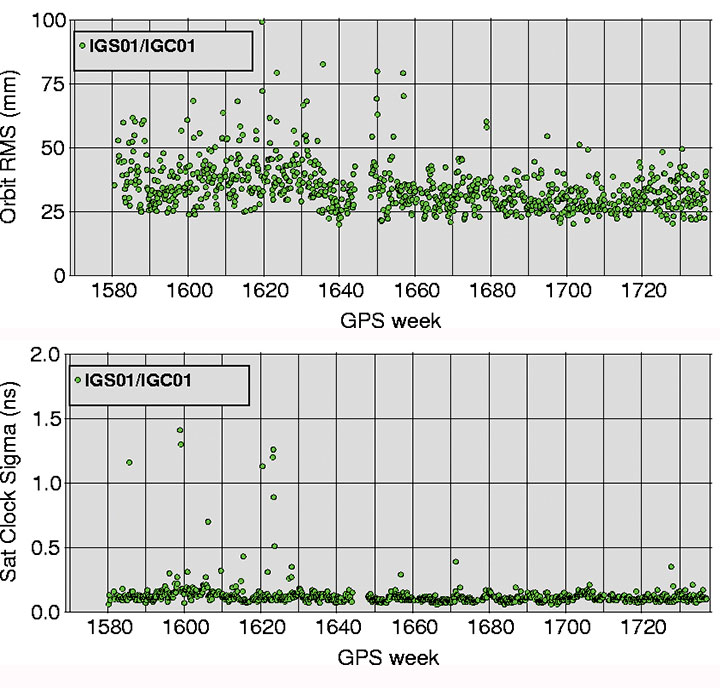
In terms of the IGS RTS, Figure 3 shows the performance of the combination solution produced by ESOC from the results of the contributing analysis centers. The plots show daily clock standard deviations and 1-D RMS orbit differences between the combination solution and the IGS rapid solution. It can be seen that the clock results are of the order of 0.1 nanosecond and the orbit differences at the level of 30–40 millimeters. The advantage of the combination is the ability to identify and eliminate outliers, by examining the differences between the contributing analysis-center solutions. It can be seen that the outliers affecting the early results have been eliminated, with very stable results since around GPS week 1650.
Figure 3. Real-time service orbit and clock comparisons against IGS rapid products.
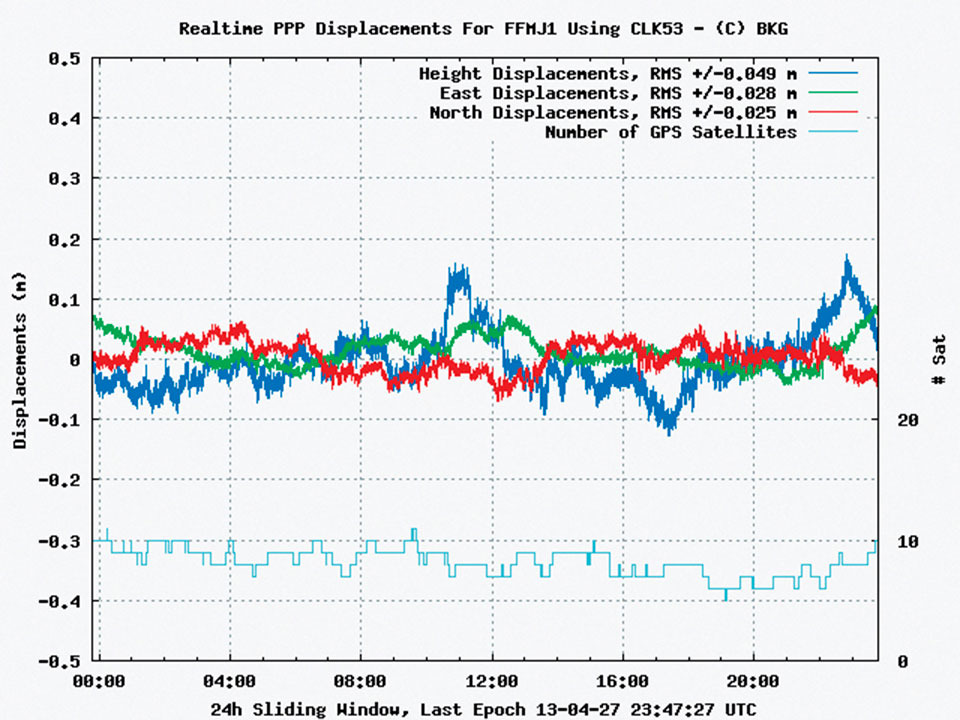
The monitoring of the RTS clock solutions in the precise point positioning (PPP) domain is performed by BKG. Figure 4 shows the kinematic PPP performance of one of the ESOC solutions over an interval of 24 hours. It can be seen that accuracies at the decimeter level can be achieved.
Figure 4. Example of kinematic PPP performance of ESOC solution.
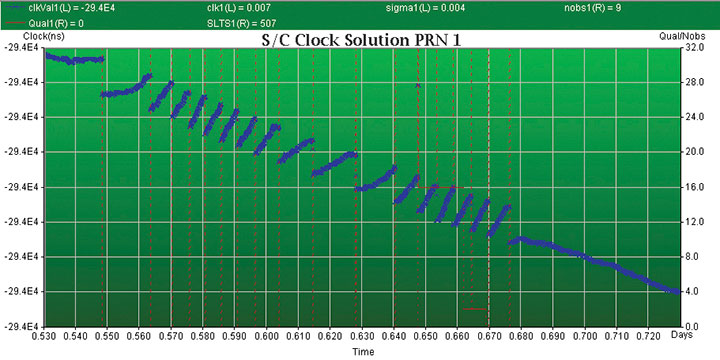
To highlight the importance of combining computational and visualization capabilities, the plot in Figure 5 shows the estimated satellite clock behavior of GPS satellite G01. Since the middle of January 2013, the satellite clock started exhibiting a series of clock jumps with a magnitude of 3 nanoseconds. This pattern was observed once per orbit, with clock jump events every 12 hours. The problem was resolved on February 6, with the satellite being taken out of service and reconfigured. The ESOC capabilities allow for the detection and monitoring of such events in real time, creating the possibilities for a timely response (for example, by suppressing the problematic satellite) to ensure the service is not degraded.
Figure 5. GPS PRN-1 anomalous clock behavior.
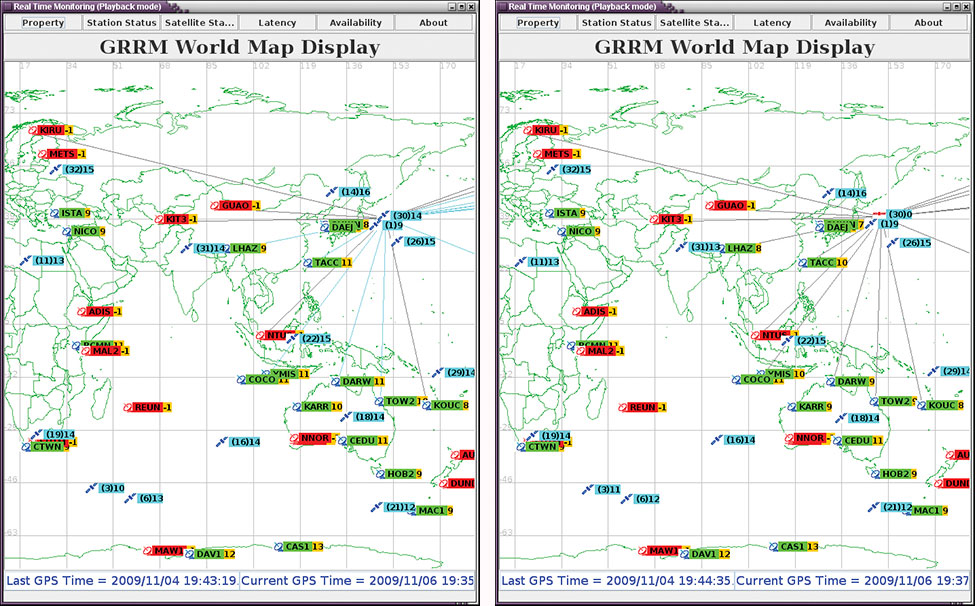
The software visualization capabilities also allow the possibility to identify and visualize signal problems with the satellites. In the example in Figure 6, GPS satellite G30 is seen to be tracked by 14 receivers at 19:43:19 on April 11, 2009. The live links are identified by the light blue lines radiating from the satellite. In the next snapshot, at 19:44:35, all 14 receivers appear to have lost the measurements from this satellite, as the grey lines indicate geometric visibility but no measurements arriving at the stations. At the same times, the receivers are continuing to track other satellites. This behavior has been observed a number of times and is known to affect only the Block IIA range of GPS satellites. A loss of measurements for a period of 1–2 minutes is typically observed.
Figure 6. Signal drop from Block IIA GPS satellite.
Conclusions
The latest improvements of ESOC’s Navigation Support Office software provide full multi-frequency and multi-constellation processing capability. The IGS Real-Time Service is provided as a routine operational service since April 2013, enabling a kinematic precise point position solution at accuracy levels in the 10–20 centimeter range. Existing ESOC real-time capabilities are also ready for potential use within Galileo.
Acknowledgements
ESOC is working with a large number of partners and real-time analysis centers. In particular we would like to thank BKG, NRCan, GFZ, CNES, DLR, GMV, JPL, IGS Governing Board, Fugro, GEO++, TUW, WHU, Geoscience Australia, NGS, UPC.
Werner Enderle is the head of the Navigation Support Office at ESA\ESOC. Previously, he worked at the European GNSS Authority and for the European Commission, in charge of the procurement for the Galileo Ground Control Segment. He holds a doctoral degree in aerospace engineering from the Technical University of Berlin, Germany.
Loukis Agrotis, with his company Symban, is a contractor for ESA working on the development of ESOC’s Real-Time GNSS infrastructure. He is also the Analysis Centre Coordinator for the IGS Real-Time Pilot Project and represents the IGS at the Radio Technical Commission for Maritime Services (RTCM). He holds a Ph.D. in satellite orbits and the Global Positioning System from the University of Nottingham, UK.
René Zandbergen is a navigation engineer in ESA’s Navigation Support Office, based at ESOC in Darmstadt, Germany. He is involved in running operational activities related to high-precision and high-availability navigation support services in near-real time and real time. He holds a Ph.D. in satellite altimeter data processing from the Delft University of Technology in the Netherlands.
There might seem to be a hole in the side of this Galileo satellite — in fact its folded solar wings are simply reflecting a noise horn in the wall, about to recreate the deafening roar of a rocket lifting off.
Anyone witnessing a rocket launch will be struck by the noise levels, even when observing from several kilometres away. A satellite on top of its launcher is exposed to much higher levels, of course. So testing is essential to ensure that the satellite structure can withstand such a sustained loud sound.
This first Galileo Full Operational Capability (FOC) satellite, successor to the four Galileo navigation satellites already in orbit, underwent acoustic testing in July, part of a full-scale test campaign taking place at ESA’s ESTEC Test Centre in Noordwijk, the Netherlands.
The satellite was placed in the Large European Acoustic Facility, LEAF, effectively the largest sound system in Europe. A quartet of noise horns are embedded in one wall of this 11 m wide by 9 m deep and 16.4 m high test chamber.
Noise is generated by passing a carefully modulated flow of gaseous nitrogen through the horns, following the predetermined test profile — this inert gas selected to avoid any contamination of any delicate onboard systems, the satellite having been placed in flight configuration for the purpose of the test.
“The acoustic noise level reached during the test was 140.7 decibels, about the same noise as standing 25 m away from a jet taking off,” explained Georg Deutsch of European Test Services, the company operating the Test Centre for ESA.
“This involved a maximum liquid nitrogen flow in this case of 3.5–4 kg per second. Liquid nitrogen delivered by tanker is vaporised to pass through the horns. More or less, we were able to finish this test campaign with one full tank of liquid nitrogen — about 18.5 tons.”
Galileo in flight configuration for acoustic testing.
Once the massive door of the LEAF is closed, its 0.5 m-thick steel-reinforced concrete walls serve to safely contain the sound. These are coated in turn with thick epoxy resin whose reflectivity increases internal reverberation.
The chamber itself is supported on rubber bearing pads to isolate it from its surroundings.
The Galileo satellite itself was similarly isolated — its support structure being borne on air-based “vibration isolators” to make sure any vibration that ensues is due to direct acoustic noise as opposed to resonance from the ground.
The satellite had to be fitted with dozens of accelerometers to detect internal vibration — large items such as batteries are most prone. The blue cables shown relay accelerometer data. It was also surrounded with microphones to check the acoustic noise around the satellite followed the planned profile, providing around 250 data channels in all.
This second FOC satellite arrived at ESTEC on 9 August from manufacturer OHB in Bremen, Germany.
A total of 14 FOC satellites are being produced as part of the first work order for Galileo FOC, which will involve a continuous round of testing at ESTEC as an integral part of their path to orbit. A second work order of eight satellites has been also released to OHB and their production will follow the production of the first batch.
LEAF.
This first Galileo FOC satellite has since had its delicate solar wings removed as part of its preparation for ‘thermal vacuum’ testing. It will stay in a vacuum chamber for weeks on end and be subjected to the same temperature extremes it will experience in orbit.
Once unboxed, the second FOC satellite will undergo a similar acoustic testing and then a System Compatibility Test Campaign
will be performed, linking it up with the Galileo Control Centres in Germany and Italy and ground user receivers as if it was already in orbit.
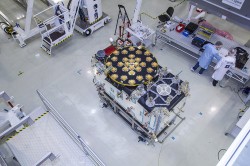
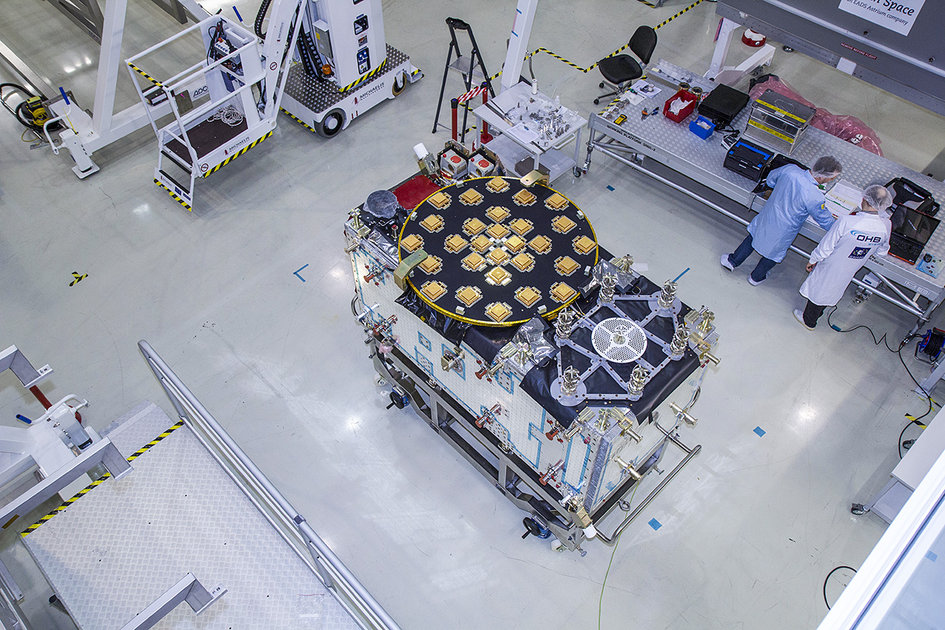
The European Space Agency (ESA) has released detailed views of the next batch of Galileo satellites, the first of which cuurently performs under simulated space conditions at the ESTEC technical center in Noordwijk, the Netherlands.
The first Galileo Full Operational Capability (FOC) satellite is functionally identical to the four Galileo In-Orbit Validation satellites already in orbit, but has been built by a separate industrial team. All 22 FOC satellites so far procured by ESA have as prime contractor OHB in Bremen, Germany; Surrey Satellite Technology Ltd. in Guildford, UK, produces the navigation payloads. The photos shown here were taken at OHB.
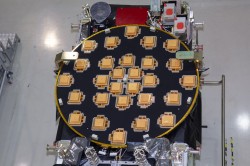
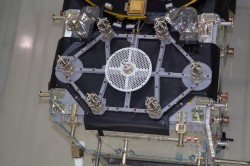
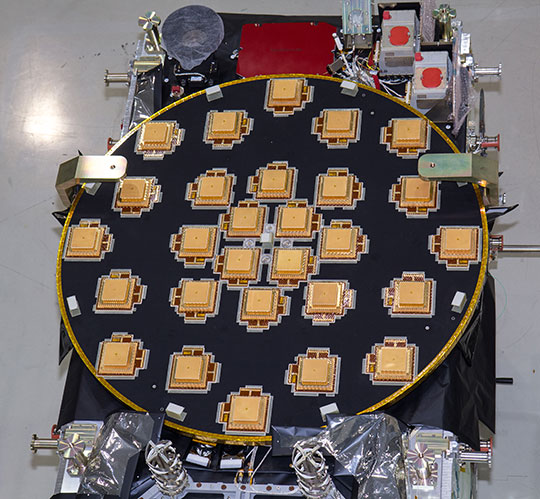
The satellite’s body measures 2.5 x 1.2 x 1.1 meters (8.2 x 3.9 x 3.6 feet), and it weighs approximately 733 kilos (1,616 pounds). Atop it in these photographs (although on the underside when orbiting Earth) is the circular L-band antenna that will continuously broadcast navigation messages.
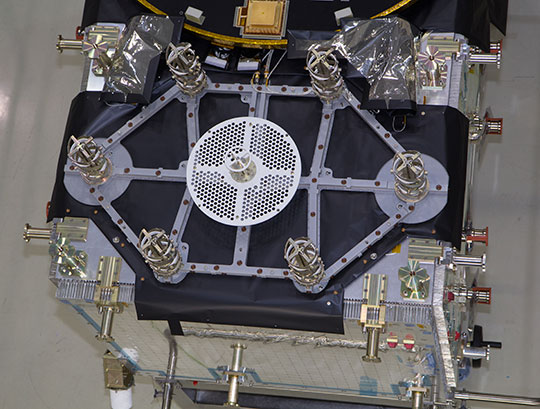
The smaller, hexagonal antenna beside it will pick up emergency messages from vessels in distress and relay location and other information to search and rescue authorities, contributing to the international Cospas–Sarsat system.
A second Galileo FOC satellite is due to also travel to ESTEC this summer, preparing for a launch later this year.
L-Band antenna of the FOC satellite. Photo: ESAemergency signal antenna of the FOC satellite. Photo: ESA
L2, L5 CNAV Testing
The U.S. Air Force Space Command began testing civil navigation (CNAV)capabilities on the GPS L2 and L5 signals on June 15 and was scheduled to continue until June 29. Civil users and manufacturers were invited to participate.
According to the GPS Directorate, the CNAV live-sky testing program will span several years and will evolve to support GPS enterprise and modernized civil navigation performance objectives. Objectives include:
◾ Verify and validate the CNAV requirements specified IS-GPS-200F and IS-GPS-705B.
◾ Facilitate the development of robust IS-compliant L2C and L5 civil receivers.
More information about the testing is available in a 52-page PDF, including sections on test strategy, event conditions and constraints, operational environment, test support resources and data collection, evaluation methodology, risk assessment, and reporting.
The L2 CNAV data is an upgraded version of the original NAV navigation message. It contains higher precision representation and nominally more accurate data than the NAV data. Two out of every four packets are ephemeris data and at least one of every four packets will include clock data, but the design allows for a wide variety of packets to be transmitted. Only a fraction of the available packet types have been defined; this enables the system to grow and incorporate advances.
One packet contains a GPS-to-GNSS time offset, enabling interoperability with other global time-transfer systems such as Galileo and GLONASS, both of which are supported. The extra bandwidth enables the inclusion of a packet for differential correction. Every packet contains an alert flag, to be set if the satellite data cannot be trusted. Users will know within six seconds if a satellite is no longer usable, important data for safety-of-life applications such as aviation.
The system is designed to support 63 satellites, compared with 32 in the L1 NAV message.
Possible New GPS Launch Option
The U.S. Air Force Space and Missile Systems Center (SMC) has signed a Cooperative Research and Development Agreement with Space Exploration Technologies Corp., better known as SpaceX, as part of the company’s effort to certify its Falcon 9 v1.1 Launch System for National Security Space (NSS) missions.
SMC and SpaceX will look at the Falcon’s flight history, vehicle design, reliability, safety systems, and other aspects. Once the evaluation is complete, the SMC commander will determine whether SpaceX has the capability to successfully launch NSS missions using the Falcon 9 v1.1.
Currently, United Launch Alliance’s Delta IV and Atlas V are the only certified launch vehicles capable of lifting NSS payloads — such as the GPS satellites — into orbit. The addition of multiple certified launch vehicles provides more options to place needed capabilities on orbit. While certification does not guarantee a contract award, it does enable a company to compete for launch contracts. Those contracts could be awarded as early as Fiscal Year 2015 with launch services provided as early as FY 2017.
GPS III Funds Cut, GPS IV on Horizon?
According to a U.S. Department of Defense (DoD) spending plan released on June 1, space programs were relatively protected in an environment of across-the-board budget cuts known as sequestration. Specifically, although the budget for GPS III has been reduced for both 2013 and 2014, the reductions still allow the proposed program to stay on course. The cuts amount to about $58 million from GPS III and its associated ground system.
Congressional lawmakers proposed spending $77 million less next year for the GPS III satellite and ground systems than proposed by the Air Force, which asked for nearly $1.1 billion.
Currently, the Air Force has eight GPS III satellites contracted with Lockheed Martin Space Systems, and current plans call for the purchase of 12 further satellites with improved capabilities.
GPS IV. Gen. William Shelton, commander of Air Force Space Command, floated the possibility of a new look for the constellation on Capitol Hill. In an April 25 House hearing, Shelton said the Air Force will study this fall whether to buy another 12 GPS III craft or move on to a new generation of satellites.
“Would it be better to continue [GPS III] as opposed to starting a whole new fourth generation?” asked Representative Doug Lamborn of Colorado. “That’s the decision we will have to make in the fall,” replied Shelton. “It seems like the answer would be ‘yes’ but we will study that.”
A key aspect of the next-next gen satellite would have to be dual-launch capability. The reduction in expense this would furnish is in higher and higher demand as time goes by. Both Lockheed and Boeing are reportedly in talks with the Air Force regarding IV.
System Briefs
GLONASS Embezzle Imbroglio. The Russian Federal Security Service is investigating the embezzlement of billions of rubles from the construction of the GLONASS center in Korolyov, a town outside Moscow, as reported by Izvestia.
Construction of the GLONASS control and support center began in June 2010 on the site used by TsNIImash, the head research company of Russia’s federal space agency. The center was supposed to hold equipment for collecting and processing the data supplied by the GLONASS global network.
The construction was financed by a federal program, with 1.050 billion ($33.22 million) allocated for the project. By the end of 2010, it came to light that construction costs had been overstated, Izvestia reports. An expert appraisal revealed that the contractor had rigged the costs. The government did not allocate additional funds, so construction was suspended in December 2011 when the Federal GLONASS Program for 2002-–2011 ended. The construction of the building has never been completed.
In November 2012, the general designer of GLONASS, Yuri Urlichich, was dismissed from his post as a result of the scandal.
IRNSS Nav Center, July Launch. The Indian Space Research Organization (ISRO) Navigation Centre for the Indian Regional Navigation Satellite System (IRNSS) was inaugurated May 28, at the Deep Space Network complex at Byalalu, near Bangalore, India.
IRNSS, an independent navigation satellite system being developed by India, will have a constellation of seven satellites in geostationary and inclined geosynchronous orbits. IRNSS coverage will extend over India and the southeast Asia region. The ISRO Navigation Centre (INC) is responsible for providing the time reference, generation of navigation messages, and monitoring and control of ground facilities including ranging stations of IRNSS. IRNSS will establish a network of 21 ranging stations geographically distributed primarily across India to provide data for the orbit determination of IRNSS satellites and monitoring of the navigation signals.
On June 15, India’s Economic Times reported that a new launch date (postponed from previously announced June 11) was set for IRNSS-R1A or 1A, the first IRNSS satellite: July 1 at 18:13 UTC.
Beidou Jammed. A Beidou satellite is now believed to have experienced interference from a complex electromagnetic environment, which cut off signal transmissions in 2007, China’s People’s Daily reported. A team of scientists was able to overcome the interference issue in less than three months by 2008.
Wang Feixue, a scientist specializing in the Beidou navigation system and a senior colonel in the People’s Liberation Army said, “Had they not been able to recover the signal within three months, future satellite launches would have been indefinitely delayed. And satellites already launched would have been put out of operation.”
EGNOS Contract. A new European Geostationary Navigation Overlay Service (EGNOS) service provision contract was signed June 26 at the European Commission Vice President Antonio Tajani’s office in Brussels. The contractee is again the European Satellite Services Provider (ESSP), founded in 2001and in 2008 transformed into ESSP SAS and moved from Brussels to Toulouse.
Its shareholders are seven European air navigation service providers: Aeropuertos Espanoles y Navegacion Aerea (Spain), Deutsche Flugsicherung GmbH (Germany), Direction générale de l’Aviation civile (France), Ente Nazionale Di Assistenza Al Volo (Italy), National Air Traffic Services (UK), Navegação Aérea de Portugal, and Skyguide (Switzerland).
QinetiQ and Septentrio jointly announced today that a milestone in the Galileo European Navigation Satellite System’s development and deployment program has been achieved. On March 12, staff at the European Space Agency at ESTEC, Noordwijk, The Netherlands, achieved the first navigation solution using only the encrypted Galileo Public Regulated Service (PRS) signals broadcast by the four Galileo In-Orbit Validation (IOV) satellites launched in 2011 and 2012. Septentrio and QinetiQ, working in close partnership, developed one of the two PRS test user receivers used in this historic first test.
PRS positioning was achieved using the Galileo PRS Test User Receiver (TUR-P) jointly developed by Septentrio and QinetiQ under an ESA contract. For the reception test, the receiver was installed in the PRS test facility in ESTEC and operated by technical experts from ESA. Positioning accuracy of ~10 meters was achieved, excellent for a first test so early in the system’s deployment. The TUR-P now continues to be used as part of the campaigns running during the Galileo In Orbit Validation Phase.
This milestone builds on a number of previous major Septentrio/QinetiQ achievements including:
First laboratory demonstration of the PRS signal acquisition and tracking in QinetiQ (Malvern, UK, 2006).
Successful RF compatibility test between a Galileo payload and the TUR-P (Portsmouth, UK, 2010).
Successful Galileo end-to-end system test including the Galileo Ground Mission Segment (GMS) and its key management facilities, satellite and TUR- P (Rome, Italy, 2011).
First successful reception and processing of the PRS signal from space (Fucino, Italy, 2012).
As key, long-term contributors to the Galileo program, Septentrio and QinetiQ have worked closely with ESA, the European GNSS Agency (GSA) and European industrial partners since 2003.
“Following last year’s first successful reception and processing of PRS signals from Galileo satellites, I am very pleased to see the program moving forward successfully,” said Leo Quinn, CEO of QinetiQ. “Achieving a first PRS-only Galileo navigation solution is a major achievement. With positioning, navigation and timing services increasingly critical to the safety, security and economic activity of UK and our European neighbours QinetiQ are very proud to be contributing to the development of Europe’s first secured satellite navigation services.
“This milestone is another important step towards the launch of operational Galileo services and will continue to build confidence in both prospective users and the industrial supply base. It showcases QinetiQ’s capabilities in this field and signals the way towards the production of exciting new solutions for critical navigation and timing applications.”
“Today, together with our partners, we take another decisive step in the early availability of commercial PRS receivers and Septentrio is extremely proud of this historic milestone for the Galileo program,” commented Peter Grognard, Septentrio’s founder and CEO. “This builds on a list of major achievements for Septentrio since the reception of the first Galileo signal from space in 2006. We are delighted to continue the excellent collaboration with ESA and to contribute to this ambitious European project.”
Averna, developer of test solutions and services for communications and electronics device makers worldwide, announced today that the European Space Agency (ESA) has selected Averna’s Record & Playback solution for signal analysis and monitoring of Galileo satellites.
The R&P platform selected by ESA features the RP-5300, a compact 2-channel wideband RF recorder designed to record live RF signals in the field, and the URT-2200 RF Player for GNSS. Averna’s R&P solution is powered by RF Studio, a high-performance RF recorder and playback software specifically designed for RF designers and researchers, to facilitate recording, analysis and storage of RF signals.
The Averna RP-5300 RF Recorder is specifically adapted for all GNSS applications, including Galileo, GPS, GLONASS, and Compass (BeiDou-2). The system has two 50-MHz wide channels that can be tuned on any frequencies from 330 MHz to 2500 MHz. To address the many synchronization and coherency challenges of GNSS testing, Averna has developed a proprietary software/hardware architecture that allows control and tight synchronization between multiple recording channels and systems under the 1 nanosecond (ns) level.
“Averna’s RP-5300 is the leading commercial product offering two 50-MHz wide channels that can capture such a wide range of real-world RF signals, complete with the interference and general degradation that end-users will experience. Two units can even be interconnected to enable a 4-channel, phase-coherent synchronized recorder,” commented Brendan Wolfe, director of Market Development for Averna. “The ESA is using the latest technology available and we are thrilled that our products have been chosen for this important undertaking.”
“Averna’s advanced record-and-playback systems support our pressing needs for long and extensive data-collection campaigns in the field,” said M. Crisci, Head of the Radio Navigation Systems and Techniques Section at the European Space Agency. “Averna’s R&P solution enables us to record multiple wideband signals at the same time, over a wide frequency range, and then replay the signals repeatedly. As receivers become more and more sophisticated, it is imperative that real-world signals and conditions be recreated for thorough validation and testing.”
Galileo is Europe’s program for a global navigation satellite system (GNSS), providing a highly accurate, guaranteed global positioning service, interoperable with the U.S. GPS and Russian GLONASS systems. It currently has four satellites in service and upon completion it will consist of 30 satellites and ground infrastructure. The Galileo system is a collaboration between the European Union and the ESA.
The European Space Agency (ESA) has released a series of photos providing the first detailed views of the next batch of Galileo satellites, the first of which has already been delivered to ESA for rigorous testing in simulated space conditions. Scroll down to see the photos.
The first Galileo Full Operational Capability (FOC) satellite was delivered to ESA’s ESTEC technical centre in Noordwijk, the Netherlands, on May 15. It is being prepared for testing in the ESTEC Test Centre, a unique facility for Europe with all the facilities needed to validate a satellite for launch under one roof.
This initial FOC satellite is functionally identical to the first four Galileo In-Orbit Validation satellites already in orbit, the operational nucleus of the full Galileo constellation, but has been built by a separate industrial team.
Like all the other 21 FOC satellites so far procured by ESA, the satellite’s prime contractor is OHB in Bremen, Germany, and the navigation payload was produced by Surrey Satellite Technology Ltd. in Guildford, UK. The photos shown here were taken at OHB.
The satellite is approximately the size and shape of an old-fashioned telephone booth, dominated by its circular L-band antenna that will continuously broadcast navigation messages down to Earth.
The smaller, hexagonal antenna beside it will perform a no less vital task — picking up emergency messages from vessels in distress to relay to search and rescue authorities, contributing to the international Cospas–Sarsat system.
A second Galileo FOC satellite is due to join its predecessor at ESTEC later this summer, preparing for a launch scheduled for later this year.
Galileo FOC: These pictures give the first detailed views of the next batch of Galileo satellites, the first of which has already been delivered to ESA for rigorous testing in simulated space conditions. Credit: OHB
Galileo FOC main antenna: Galileo FOC is dominated by its circular L-band antenna that will continuously broadcast navigation messages down to Earth. Credit: OHB
The Galileo FOC satellite is approximately the size and shape of an old-fashioned telephone booth, similar to the preceding IOV design. Credit: OHB
Galileo FOC search and rescue antenna: Galileo’s smaller, hexagonal antenna beside its main navigation antenna is designed to pick up emergency messages from vessels in distress to relay to search and rescue authorities, contributing to the international Cospas–Sarsat system. Credit: OHB
Gaileo Full Operational Capability satellites in orbit – the second batch of Galileo satellites. These FOC satellites follow on from the initial four Galileo In-Orbit Validation satellites, the first two of which went into orbit on 21 October 2011 with the remaining two joining them on 12 October 2012. As prime contractor for the FOC satellites, OHB is responsible for developing the satellite platform and integrating the satellite with its payload – the part of the satellite that provides Galileo’s precision positioning measurements and services to users worldwide – developed at Surrey Satellite Technology Ltd in Guildford, UK (also providing assistance to OHB with final satellite assembly). Credit: OHB
Galileo FOC satellite does same work as the IOV predecessor. The ‘business end’ of the Galileo FOC satellite hosts the L-band navigation antenna and the smaller search and rescue antenna on the same face. This initial FOC satellite is functionally identical to the first four Galileo In-Orbit Validation satellites already in orbit, the operational nucleus of the full Galileo constellation, but has been built by a separate industrial team. Like all the other 21 FOC satellites so far procured by ESA, the satellite’s prime contractor is OHB in Bremen, Germany and the navigation payload was produced by Surrey Satellite Technology Ltd in Guildford, UK. Credit: OHB
The fourth International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme will be held in Prague, Czech Republic, December 4–6.
Since 2007, the worldwide scientific community has met every two years to discuss the possibilities for boosting the scientific use of Galileo and for contributing to the development of the GNSS.
The event is always organized in one of the 20 European Space Agency’s Member States, and makes an essential contribution to ESA’s implementation and definition of the evolution of the European GNSS. The gathering of major academic players provides a scientific reference for institutional executives and industry, as well as offering a unique platform for promoting innovative GNSS initiatives at large.
The colloquium focuses on four major areas of research:
Scientific applications in meteorology, geodesy, geophysics, space physics, oceanography, land surface and ecosystem studies, using either direct or reflected signals, differential measurements, phase measurements, radio occultation measurements, using receivers placed on the ground, in aircraft or on satellites.
Scientific developments in physics, dealing with future GNSS, particularly in testing fundamental laws in astronomy and in quantum communication. Relativistic reference frames and relativistic positioning will be addressed.
Aspects of metrology such as reference frames, onboard and ground clocks, and precise orbit determination.
Scientific aspects of satellite navigation and positioning such as signal propagation, tropospheric and ionospheric corrections and the means to model and mitigate multipath and interference.
The various possibilities to use navigation satellites such as Galileo for scientific purposes will be reviewed and the use of scientific applications to contribute to make the most of the present systems and define their evolution will be scrutinized.
The conference is being organized as a series of plenary talks and two parallel half-day sessions.
Online submission of abstracts is open until June 14 through the colloquium website, where other detailed information is also available.
The radio spectrum is about to get even busier, as Europe’s Galileo satnav system starts services, at the same time the European Space Agency (ESA) tests novel satellite-based telecommunication services. Supporting these developments from the ground, ESA’s new custom-built Telecommunications and Navigation Testbed Vehicle will measure the resulting signals from all over Europe.
Adapted from a Mercedes Benz Sprinter van, this unique measurement vehicle has been delivered to ESTEC by Austria’s Joanneum Research institute. “This is a dual-purpose vehicle, suitable for both telecommunications and navigation system testing,” explained Simon Johns of ESA’s Radionavigation Systems and Techniques Section.
“For navigation, we have the Galileo constellation coming on stream, as well as the stepping up of ESA’s GNSS Evolution programme — designing what comes next after Galileo’s first generation.”
The four wheel-drive vehicle can host a three-person team, and is crammed with dedicated navigation and telecommunication monitoring equipment.
Testbed vehicle screen.
“One of the main goals driving the design was to have an ‘easy to adapt’ test platform suitable to set up test campaigns for different mobile satellite systems and standards that would require different types of antennas and specific receiver/transmit equipment,” explained Olivier Smeyers of ESA’s Communication-TT&C Systems and Techniques Section.
“On the telecommunications side, there is a continuous effort to enhance current and create new mobile satellite-based broadcast and interactive services via the evolution of current systems or developing new standards,” Smeyers said. “Testing in the field is an essential element for validating and eventually establishing evolved or new standards. The vehicle has built-in multimedia equipment, including storage and control computers, multimedia gateway, passenger LCD screens, cameras and microphones, to serve this purpose.”
The vehicle features include two removable roof plates to mount specialized antennas (one currently hosts the antenna of a Broadband Global Area Network satellite terminal for Internet connectivity and multimedia and data streaming), an 8-meter-high telescopic mast capable of carrying 25 kilograms, a rubidium atomic clock synchronized to GPS time with nanosecond accuracy, a high-end spectrum analyzer and oscilloscope for signal measurements, and mobile temperature sensors to monitor the rack equipment.
A fish-eye video camera incorporating onscreen GPS timing and positioning performs continuous recording of its surroundings — to throw light on high buildings, trees, or other factors that might affect results.
Internal and external generators yield up to 5 kilowatts to keep everything running — sufficient power to supply two typical European households.
“The challenge was to fit in all the equipment and provide the necessary power and air conditioning, while still weighing less than 3.5 tonnes,” said Thomas Prechtl of Joanneum Research. “Exceeding this weight would have meant drivers would have needed a special license, and potentially limited its operations in some European nations.”
The European Space Agency (ESA) is helping to set the world’s time. Ultra-accurate atomic clocks of ESA’s Navigation Laboratory, which will be used to assess performance of the Galileo satnav system, have joined the global effort setting Coordinated Universal Time down to a billionth of a second.
The replacement for Greenwich Mean Time, Coordinated Universal Time (UTC) is the timing used for Internet, banking, and aviation standards, and other international timescales, maintained by the Paris-based Bureau International de Poids et Mesures (BIPM).
Participating measurement institutes and observatories around the globe use collections of atomic clocks to estimate a current value for UTC. These clock data are fed through to the BIPM to be carefully weighted and averaged to derive a combined global value. The complexity of this effort is such that it takes around six weeks to arrive at a definitive final figure, ESA said.
Atomic clocks at ESTEC’s Navigation Laboratory. Once Galileo services start, ESA’s Navigation Lab will play an important role independently validating Galileo timing performance. Its atomic clocks, offering precise timings for ESA missions and experiments, are also contributing to the global setting of Coordinated Universal Time (UTC), the replacement for GMT.
ESTEC Director Franco Ongaro has signed an agreement with BIPM to mark the international recognition of the ESA timescale and the addition of ESA’s atomic clock data to the UTC calculations. “This is an independent timing capability that ESA’s Navigation Laboratory — based in ESTEC in the Netherlands — built up to support validation of Galileo timing performances, and before it the experimental Galileo GIOVE satellites,” explained Pierre Waller of ESA’s RF Payload Systems division.
“But it makes sense to apply it more widely, and this BIPM recognition reflects the quality of our data. Our UTC estimate — formally known as UTC (ESTEC) — is also available for projects within ESA: there are many space applications beyond just navigation, such as precision technical experiments or synchronization of telecommunications and deep-space ground stations.
“Incidentally, it is important to note that our contribution to UTC does not replace the existing input from the Netherlands’ own national timing metrology institute, Van Swinden Laboratories (VSL) in Delft. Instead we are adding to it, for enhanced global accuracy overall.”
Galileo, like all other satellite navigation systems, is based on the highly precise measurement of time. A receiver on the ground pinpoints its position by calculating how long signals from satellites in orbit take to reach it.
Matching the receiver and satellite clocks then multiplying the time taken by the speed of light gives the range between the user and the satellite. This allows the receiver to fix its longitude, latitude and time when in contact with four or more satellites. Atomic clocks on each satellite keep time to a matter of nanoseconds — billionths of a second — synchronized by a worldwide ground network.
The European Space Agency (ESA) has introduced a wiki-based information source, Navipedia, a technical wiki open to the public. Written and reviewed by experts, there are more than 400 articles on the site covering the fundamental principles of satellite navigation, how receivers operate, the various systems in current or future operation around the globe, and GNSS-related services and applications.
“GNSS information on the Internet is scattered widely and not always technically correct,” commented Guenter Hein, ESA’s Head of Galileo Operations and Evolution. “We also noticed many GNSS books were quickly outdated. So, considering the extremely dynamic nature of the GNSS world today, we decided that having a duly updated single entry point GNSS wiki could be extremely beneficial for the entire GNSS community.”
“This new website is intended to serve a wide range of users from GNSS institutions and industry to academia and the public interested in knowing more,” said Javier Ventura-Traveset, responsible for the development of Navipedia and in charge of managing GNSS education activities for ESA. “Navipedia articles have therefore been classified into three categories: basic, medium, and advanced, with target audiences ranging from highly knowledgeable GNSS specialists to the general public. I am convinced Navipedia will be an excellent tool for promoting and supporting GNSS education in Europe.”
The initial version of Navipedia was produced with contributions from GNSS experts at the GMV company — formally contracted for the task — as well as several European universities, notably the University Polytechnic of Catalonia, and an internal team of ESA navigation experts.
Following the wiki template, the website is now being made editable also by outside contributors.
“We have now reached a sufficient critical mass of technical content so that we can open Navipedia to the external public,” Javier said. “We expect contributions from GNSS experts around the world, which will then be duly reviewed by an ESA technical editorial board, to ensure that the technical information provided is always reliable and sound.”
The beta version of Navipedia was launched at the Munich Satellite Navigation Summit on March 14.
“ESA has been involved in GNSS technologies for more than a quarter of a century and today is serving as the design and procurement agent for both EGNOS and Galileo,” concluded Guenter. “This provides ESA with unique technical knowledge that Navipedia allows us to share, to help support GNSS education across Europe.”








 QinetiQ
QinetiQ