Report from the 2015 China Satellite Navigation Conference
By Greg Turetzky
This May, the sixth China Satellite Navigation Conference (CSNC) was held in Xian, site of China’s famous buried warrior tombs. This was the fourth time I have attended, and every year the event has grown in both attendance numbers and global importance.
The conference opened with the usual provider updates on satellite systems and international collaboration. There was nothing truly unexpected. All the providers continue to make progress towards launching new satellites with new capabilities, as well as providing regional augmentation systems for aircraft navigation.
The hosts were their usual gracious selves and put on a very entertaining evening at “The Night of Beidou” event with wonderful food as well as music, dancing and and acrobats.
Exhibit Hall
The show floor continues to grow at a rapid rate. The program listed122 exhibitors. The market has clearly entered the rapid proliferation stage. The booths were large, well-staffed and busy even during times when technical sessions were in progress. It was hard for me to determine what kind of business was being conducted as there were not many booth staff that spoke English. However, that seemed very appropriate as it was clear that the Chinese domestic market for BeiDou, or BDS, is well established and growing.
In fact, many of the booths were regionally sponsored as there seems to be plenty of local subsidization to grow the GNSS industry in all areas of China. Many companies were displaying end-user products for all segments, from watches to phones to automotive to survey. I also noted significant growth in the number of chipset suppliers; I stopped counting at 10. Of further note and interest, the first few mergers/partnerships have taken place, as the market starts to make its natural turn from proliferation to consolidation.
Technical Sessions
The technical content of the conference is impressive. Approximately 280 papers were presented in up to nine simultaneous tracks over three days. Another 100+ posters were available for viewing.
Here are titles of a few of the papers I liked:
Analysis of relative positioning performance of BDS triple frequency
Anti-spoofing design for Civil Navigation Signal system
Clock-error resolution strategy and precision analysis of GNSS real-time precise satellites
Research on detection and identification methods of satellite navigation RAIM multi-satellite failures.
Research on Wi-Fi/INS indoor pedestrian navigation system based on environmental feature augmentation
Reflections on demands of BDS intellectual property rights in satellite navigation industries
Review of anti-interference RF of satellite navigation receivers
A new TOA estimation method for the navigation pulse of X-ray Pulsare.
If you plan to visit next year, you should consider bringing a translator. Many of the sessions have simultaneous translation, and most of the presentations have both English and Chinese slides, but not all of them. In the past, I have always enjoyed the policy and IP session, but this year it did not have a translator and the presenters spoke in Chinese, so I cannot give you much information. I did notice that several other U.S. companies had sent representatives who were native Chinese speakers.
Conclusion
The Chinese market is now full of grown tigers. I think they worry more about domestic competition for large domestic opportunities than they do about foreigners taking market share from them. That kind of competition has spurred them to catch up quickly in terms of technology and performance to where the big foreign competitors are. I foresee intense domestic competition in the short term leading to fewer, bigger, stronger players who will then be well positioned to compete in the global marketplace.
GREG TURETZKY is a principal engineer at Intel responsible for strategic business development in Intel’s Wireless Communication Group focusing on location. He has more than 25 years of experience in the GNSS industry at JHU-APL, Stanford Telecom, Trimble, SiRF and CSR. He is a member of GPS World’s Editorial Advisory Board. See his previous reporting on the 2014 CSNC, “Tigers, Tycoons on View at China Satnav,” and the 2013 conference, “Little Tigers versus Wolves.”
The statements, views, and opinions presented in this article are those of the author and are not endorsed by, nor do they necessarily reflect, the opinions of the authors present and/or former employers or any other organization the author may be associated with.
Sessions on indoor navigation and a keynote from Google at February’s International Navigation Conference (INC15), organised by the Royal Institute of Navigation, addressed the revised E911 positioning requirements in the United States, and flowed over into speculation about E112 emergency calling parameters in Europe’s near future.
According to the 2014 U.S. Federal Communications Commission report, 75 percent of 911 calls now come from mobile phones, more than half of those originate indoors, and around 1 percent of emergency calls contain no location information from the caller (due to distress, confusion, language issues, illness, and so on). The report estimates 10,000 deaths per year in the United States might have been avoided if a landline had been used instead, since location information for landlines can be provided confidently.
Discussion in the breaks of INC highlighted a misunderstanding amongst some parties that E911 mandates the use of GPS for position location determination. In fact,E911 does not mandate any specific technology; it specifies performance criteria in terms of accuracy that must be met. The recently revised performance criteria include indoor performance, and some of the technology discussed at the INC is able to meet these requirements without using GNSS at all.
This could be troublesome for Europe, which is looking at the imposition of Galileo as part of an A-GNSS technology push for the E112 application. The real problems, discussed during INC and in European consultation processes with safety of life services such as E112, are:
the accuracy of the position derived by the device and/or network, and
the timeliness of the delivery of that position to the Public Service Answering Point (PSAP).
The E911 directives address these points directly, and the infrastructure in the cellular networks is in place. Does simply implementing a Galileo capability into a European mobile device solve these problems?
In many outdoor cases, implementing Galileo can bring benefits, including signal diversity. And of course the E112 proposal is greater than just “adding Galileo.” It does address the second problem of timeliness of delivery and data transfer, but there are significant infrastructure upgrades required across Europe for the provision of this location data to the PSAPs.
What the E112 processes do not currently do is specify performance criteria for the position location accuracy. This means that the position estimate provided under E112 is likely to be a cell-ID fix, with an accuracy ranging from hundreds of meters to dozens of kilometers.
Galileo on Mobiles. Further discussion during the conference delved into the realms of the specifics of implementing A-GNSS, including Galileo, onto a mobile device. Conversations centered around if any future E911 or E112 positioning capability would be aligned around a single-chip solution as generally currently deployed on a device, or if some of the functions will be moved up the stack into the operating system (OS) of the device, into software.
Most opinions were against this latter concept, and a panel at the ION GNSS+ last year in Florida concluded the same thing. However, questions were asked about some ideas relating to identifying the emergency number at the time of dialing and then starting the position location determination functions in readiness for the need to provide the device location. This addresses the first bullet point earlier, the accuracy of the position derived by the device and/or network. If this is carried out in the OS or software layers, vulnerability of the system will be increased overall as the OS of a mobile device is a target for the cyber criminal community.
A robust software-based solution is, however, being rolled out in the United Kingdom in the form of eSMS, bringing mobile operators, government and handset vendors together to provide location data via SMS to the PSAP. The advantage of this approach is that no new standards or major infrastructure changes are required, and the time to implement is small.
Further discussions established that future chipsets are likely to use whatever GNSS signals are available, regardless of whether they are GPS, Galileo, GLONASS, Beidou and so on. This, coupled with new signal processing techniques (single-frequency observable for example), increasing sensor clustering on devices, and user demand for services, may make the use of a specific GNSS system above others somewhat redundant. Certainly picking up on a point made by Chandu Thota from Google, GNSS is “not relevant” for their indoor positioning solutions, and technologies they are working on, in both hardware and mapping improvements, are looking at meeting indoor accuracy requirements down to a target requirement of 1 meter, without GNSS.
Taking these points into account, questions were asked from the floor of the conference about the legal position of the EC mandating Galileo as a positioning method as well as the willingness of the global mobile chipset and device industry to be told what to do. Perhaps specifying strong performance criteria, as in the United States, is the way forward to “reboot” the European E112 system. No one disputes that a properly functioning E112 is a life saver and a good thing to do; however, the points discussed here detail some of the concerns expressed during and after hours at INC15.
In February 2015, the Royal Institute of Navigation hosted the International Navigation Conference in Manchester, UK. Keynotes at this well-attended conference included Harold Martin, director of the GPS Coordination Office; Gian Gherardo Calini, the head of market development at the European GNSS Agency; Todd Humphreys from the University of Texas; Chandu Thota from Google; and others. The conference covered multiple technology tracks including indoor navigation, autonomy, quantum technology and the resilience of GNSS systems.
Andy Proctor is lead technologist for satellite navigation at InnovateUK, the UK’s innovation agency. He acknowledges Ramsey Faragher, Cambridge University, for help in the preparation of this article.
Precision matters. While “accuracy” is somewhat one-dimensional, “precision” is multi-faceted. We submit to you that whatever area of GNSS-based location you are interested in, precision matters today and will matter more in the future. In this column, we’ll explain why this is.
Traditional test approaches involve taking measurements to evaluate fundamental performance, for example, time-to-first-fix. As the number of critical applications that rely on positioning, navigation and timing (PNT) increases, the list of considerations for testing also grows.
Critical applications typically require higher integrity. There are a myriad of techniques to achieve this, from adding constellations, additional frequencies, improved navigation message authentication approaches and everything in between. Examples of safety-related applications include rail, connected car and aviation. Commercially critical application examples are smartphone payment authentication and container port automation. Protecting the warfighter and ensuring mission success against growing interference and jamming are key initiatives for the military. All of these applications are becoming more sophisticated and complex, stressing the importance of precision in testing.
Neal Fedora
Testing these critical applications requires:
Precise and clear test objectives
Precise definition of test approaches to explore both nominal and off-nominal conditions
Comprehensive test tools that include all required signal components precisely modeled and controlled
Test signal precision of at least an order of magnitude better than the device under test
Results analysis that can quickly and effectively highlight areas of interest or concern.
Robustness against Cyber Attacks. The second area calling for more precision is the need for a more robust PNT systems in the face of increasing cyber attacks and interference. While well known in the IT world, the GNSS community is relatively unfamiliar with being targeted by hackers. Attacks on GNSS technologies are increasing in frequency and sophistication for both commercial and military users. The stakes are rising as the incidents increase from occasional (often accidental) interference to more structured and organized approaches to jamming and even spoofing.
We’re predicting a game of cat and mouse where these cyber attacks and interference threats will continually evolve to try and stay one step ahead of the protections in place. In our view, this will call for increasingly clever and proactive threat-detection techniques in navigation systems, in addition to precise, reliable test solutions to verify them.
Spirent’s test solutions address these growing demands by providing not only multi-GNSS signal simulators, but also inertial and interference simulators, anti-jamming test solutions, and record and replay of actual observed interference and even communications port vulnerability testing.
In our view, the diversity of critical applications will increase, emphasizing the need for a precise approach to test planning, execution and analysis. Robust PNT is an achievable vision, and we are excited for the future.
John Pottle is marketing director for Spirent Communications plc. Neal Fedora is director of engineering for Spirent Federal Systems Inc.
A leap second will be introduced this year at 23:59 on June 30. This phenomenon comes around periodically and is necessary for keeping Coordinated Universal Time (UTC) in line with the small vagaries of the Earth’s slowing rotation. Although it is an event that will pass unnoticed by the majority of people, it has implications for anyone involved in the development of GNSS-enabled devices. For some, it can be the cause of a major headache.
Part of the problem with the leap second is its irregularity. Occurring every two or three years, it means that receiver technology moves on in between — and because the Earth’s slowing rotation is not at a constant rate of change, it cannot be predicted when the next one will be announced. A rapidly developing market of GNSS products having to deal with random alterations to its time framework is not an ideal situation. Suitable preparations, clearly, should be employed.
The behavior of a new receiver when subjected to a leap second may prove critical in certain instances, and without robust characterization it can lead to inconsistent performance. It has already happened this year: on January 21, GPS signals started to include information which effectively announced this year’s leap second event, with the relevant data for future delta time, and week and day numbers. This caused issues with some receivers that weren’t expecting it: some units applied the additional second immediately. It would be interesting to see how these systems might have reacted during an actual leap second transition.
Receiver logic flow requires testing so that any GPS receiver can remain compliant with the IS-GPS-200 standard, and potential problems mustbe mitigated and controlled. The use of a GNSS simulator — which outputs a scenario containing the leap second event — allows for the receiver and any systems around it to be exercised over and over again, ironing out any anomalies, to ensure total reliability.
The recent issues with those non-compliant GPS engines highlights the advantage that simulation provides. The consistency it delivers enables a very thorough testing schedule, which will in turn lead to a straightforward application of the time change.
One school of thought holds that leap seconds should be abandoned, and that we should stick to atomic time from now on. Their removal would mean that by 2100, the Earth’s rotation would be some two to three minutes behind humanity’s precise, atomic-powered, 24-hour clock, and half an hour or so by 2700.
The World Radiocommunication Assembly, which has control over such matters, had been postponing a decision on whether to abolish the leap second for over a decade; another vote is due this year. It wouldn’t be any great wonder if this prevarication continues, so whilst it still exists, it is best to concentrate on what this June’s extra second might have in store for anyone currently developing a GNSS product. Armed with a simulator, the unpredictability of leap second scheduling should no longer be a major concern. Should this year’s vote be again inconclusive, those who have taken the positive step of acquiring a GNSS simulator will be in good shape to deal with the next time the clocks show 23:59:60.
Mark Sampson is LabSat product manager for RaceLogic.
Concerns raised about cascaded Kalman filters for loose coupling and/or usage of input data “massaged” in unknown ways are not new, but are routinely excused by requirements to use coordinates from receivers not providing measurement outputs. Often, however, a receiver’s internal 8-state extended Kalman filter (EKF) is not fed with precise carrier phase data — and even when it is, its velocity outputs (being both filtered and unaided) have limited ability to follow high dynamics. Velocity pseudomeasurements under those conditions interfere with IMU aiding.
The extent of reduction in capability of course depends upon the equipment (widely varying and beyond reach of the user) and upon the scenario. Not only flight paths but any trajectory with sharp changes in speed or direction are affected. Twisting, jerking, and winding motions actually experienced can be reported as having reduced severity, and attitude history will suffer further inaccuracy. A demand to accommodate loose coupling is then best satisfied by pseudomeasurements in position only.
This is not an attempt to coax an entire industry into abandoning a very popular choice for satnav/inertial measurement unit (IMU) integration. By “what’s wrong with it” I mean how it’s often done. Believe it or not, there’s a fundamental self-defeating trait in current practice.
Admittedly, I gave short-shrift to loose coupling in my 2007 book GNSS Aided Navigation & Tracking; all flight data processing results in it were for tight coupling with carrier phase (actually, 1-second changes in phase) included. Some years ago, though, I reran segments from that flight, including takeoff and another segment containing a 180-degree turn, with only latitude/longitude/altitude (LLH) pseudomeasurements and no carrier-phase information. Not surprisingly, it provided accuracy commensurate with quality of the LLH input (how could it not?). With heading info added, the velocity errors (peak transients of a few meters/second near start and end of the turn; otherwise smaller) and leveling accuracies (a few mrad) were likewise commensurate with input quality.
I never bothered to publish that; the world doesn’t need more testimony for ability to convey data obtained from a receiver with satellite visibility favorable throughout.
I avoided, however, using pseudomeasurements of velocity. Precisely therein lies the target of this critique: velocity from a receiver’s internal 8-state EKF, fed only from position-dependent measurements in the form of pseudoranges. More broadly, this focuses attention on receivers wherein carrier-based information is either unused (immediately below), imprecise (for example, by using deltarange or cutting corners in other ways), or filtered (thus correcting with averaged past, rather than near-instantaneous, derivative data).
First, velocity observables derived exclusively from the same inputs providing position create a glaring violation of independence — but there’s also a bigger issue: Velocity pseudomeasurements with that scheme constitute a basic contradiction of inertial aiding. A main purpose of the IMU is to reveal dynamics with promptness that data derived from pseudorange histories can’t match. Allow me to review some fundamentals here.
At UCLA more than a half-century ago, I taught undergraduate lab experiments. One illustrated under-/over-/critically damped response, a concept so familiar that no math is needed to explain it. Any application will suffice; that experiment involved control of a motor shaft position. A simple transfer function applied to the position feedback signal determined the damping. With all feedback derived from position, either critical or slight underdamping was de rigeur.
Addition of rate aiding (for that experiment, a tachometer) dramatically improved response without degrading accuracy. The obvious reason: it was no longer a choice between responsiveness versus accuracy. Both are available when an independent rate sensor accompanies the position indicator.
Now, consider redesigning that controller’s rate portion of the feedback signal, giving dominance to sequential changes in position. Unless both highly precise and independent, that would curtail the benefit (that is, improved response to dynamic change) of adding measured rate. Degradation would also arise from giving dominance to a more crudely approximate and/or heavily filtered indication of rate.
There are differences between that example and satnav/IMU integration (for example, estimation versus control; time-varying versus constant gains; and so on) but the principle remains applicable. When derived rate from that 8-state Kalman filter is used to correct (thus overrule) the velocity history, the responsiveness to dynamics offered by the IMU is being undermined by a process that’s beyond reach. The system’s position and velocity then draws nearer to the output of an unaided (standalone) receiver.
The practice raises various questions:
Is that an integrated approach worthy of the name? Or doesn’t the IMU just derive attitude adjustments by riding piggy-back — thereby taking (velocity history from an unaided receiver) without giving (unimpeded improvements in response to dynamics, as expected from inertial aiding)?
How good is that system’s accuracy (not in position; in velocity and in leveling — and not from simulation; from flight data with dynamics)?
If LLH data were replaced by pseudoranges for tight integration, would velocity pseudomeasurements still be used, to give coupling tight for position but loose for velocity?
(I hope not.)
Since velocity pseudomeasurements are unnecessary in tight integration without carrier phase data, then why use them with LLH?
I’ll turn that last item into a recommendation for satnav/IMU suppliers hoping to compete successfully: If you must include a loosely coupled mode to accommodate LLH-cum-velocity data from a receiver’s 8-state EKF, don’t use receiver velocities as observables. Your system outputs will evolve without them.
Appropriate design is required (you’ll have to do more than just disconnect the velocity inputs) but, given that, all information will be extracted from the IMU and LLH data — with inertial aiding in high dynamics unobstructed by superfluous (8-state-derived) velocity data. Accuracy will improve in not only velocity but also attitude — from simpler software.
An objection might be raised, noting fair performance when exploiting the full 8-state information if dynamics are always mild. To that I would answer: Is there no limit to how much performance will be sacrificed just to accommodate expediency? Loose coupling already forfeits robustness. Let’s not compound that by surrendering dynamics as well. All of us realize the large, and growing, array of obstacles disrupting successful operation. Why design only for benign conditions? Approaches taking advantage of advances beyond exploiting separate pseudoranges (usage of precise carrier phase, ultratight coupling, FFT-based deep integration) remain ever more in the minority, despite myriad threats to GNSS.
This discussion has concentrated on unnecessary limitations of loosely coupled GNSS/INS integration performance as commonly practiced. Similar problems in systems with tighter integration are less prevalent but still not uncommon (for example, inertial instrument error modeling is still not widely understood, and attitude accuracy reported from many sources doesn’t reach achievable levels. Those familiar with my writings are aware of various changes I would advocate, not limited to inertial or satellite navigation. Those and other issues will be left to another time.
James L. Farrell worked for 31 years at Westinghouse in design, simulation, and validation of navigation and tracking programs. He teaches and consults for private industry, the Department of Defense, and university research through Vigil, Inc.
By Li Wang, Director of the International Cooperation Center, China Satellite Navigation Office
By adhering to the principles of independence, openness, compatibility, and gradualness, China is steadily accelerating the construction and development of the BeiDou Navigation Satellite System.
The BeiDou System already provides continuous and reliable Full Operational Services to most parts of the Asia-Pacific region. Its positioning, navigation, and timing performance keeps improving, while the deployment for a global constellation is also making progress. The BeiDou System and its products, which are compatible with other navigation satellite systems, have been gradually applied in many sectors and industries related to the national economy and to entering the mass market.
As one of the four core GNSS service providers, BeiDou has always made unswerving efforts to exchange, coordinate, and cooperate with other organizations, system providers, and users.
BeiDou has been actively engaged in international affairs on the platform of the United Nations, such as participation in related activities held by the International Committee on Global Navigation Satellite Systems (ICG), and coordinated affairs under the framework of the International Telecommunication Union (ITU). It has also pushed forward the integrated applications of BeiDou and other navigation satellite systems in the fields of civil aviation, maritime traffic, mobile communication, and so on.
In order to provide better services for global users, the BeiDou system has carried out exchanges and coordination with the other navigation satellite systems. It has established cooperative mechanisms with GPS and GLONASS, and respectively signed the Joint Statement of U.S.-China Civil Global Navigation Satellite Systems (GNSS) Cooperation, as well as the Memorandum of Understanding between China and Russia on Cooperation in the Field of Satellite Navigation. Furthermore, the cooperation between the BeiDou and Galileo systems has also been included into the China-EU 2020 Strategic Agenda for Cooperation.
Potential areas for cooperation may include compatibility and interoperability, GNSS applications, policies and standards, international GNSS service performance monitoring and assessment, and so on.
Meanwhile, the BeiDou System continues carrying out the BeiDou/GNSS Application Demonstration & Experience Campaign (BADEC) and has negotiated with related countries to jointly establish BeiDou/GNSS Centers. Those centers will implement BeiDou/GNSS popularization, exhibition, application demonstration, and user experience activities, as well as system performance testing and assessment, academic exchanges, training, and R&D, to jointly promote the compatibility and interoperability among the multiple navigation satellite systems, boost the spread of technologies, and improve satellite navigation applications and industrial development..
In 2015, China will continue this effort, launching four to five next-generation BeiDou Navigation Satellites (MEO and IGSO) for testing and verification of new technologies.The BeiDou System with global coverage will completely be established by around 2020. This will enable provision of continuous, stable, and reliable satellite navigation services for global users.
Global navigation satellite systems and related industries are going through an unprecedented revolution. Under such an environment, compatibility and interoperability among systems, and integration of multiple industries, will be the tendencies of future, which will definitely promote wide applications of GNSS in broadening fields. During such a process, the BeiDou System with distinctive characteristics will abide by the objective of “serve the world and benefit mankind,” undertaking the responsibility and obligation to work together with other systems to provide better services for global users.
Li Wang is the director of the International Cooperation Center, China Satellite Navigation Office.
What a difference eight years can make! My September 2006 GPS World article “Managing the GPS Constellation for Today’s Needs” dealt with GPS performance issues many high-precision users then faced. Demanding applications of real-time precision positioning, such as precision agriculture and machine control, did not find enough satellites in view to support their needs.
I posed the question: Is the problem with the number of usable GPS satellites, or with growth in the demands of the user community? The 2006 answer was: a little bit of both.
Now the issue has pretty much gone away. Users have adapted to incorporating other GNSS signals, initially GLONASS and now BeiDou. Russia’s commitment to operate GLONASS at full capacity developed into today’s operation of its 24-satellite constellation. China’s similar declaration led to deployment of 16 satellites to date toward an eventual constellation of 35. Europe is likewise poised to offer global services with Galileo. GPS’s days as the sole provider of ubiquitous, accessible services appear to be over.
One of my 2006 recommendations was for GPS decision-making authorities to support an aggressive program to replace aging satellites. This has been done. GPS went from one IIR-M satellite in 2006 to the present seven IIR-M satellites and seven IIFs. They provide a new civil signal on L2C, and the IIF provides a new civil safety-of-life signal on L5.
Let’s look at the differences in service between 2006 and 2014 as shown in Table 1. GPS RMS user range error (URE) has been cut in half, and the number of usable GNSS satellites has gone up by 39 percent (44 to 61).
Table 1. Differences in GPS service between 2006 and 2014.
Today GPS and GLONASS operate at full capacity. GPS exceeds its marks by providing 31 satellites broadcasting signal-in-space range errors in the half-meter range, even as Block IIF satellites add L2C and L5 signals. GPS high-precision users also employ space-based augmentation systems services such as WAAS, EGNOS, and QZSS. Internet-connected GPS receivers, including those in cellular phones, use Assisted-GPS to provide near instantaneous times to first fix.
One drawback to GNSS is its undependability when subjected to blockage, interference, or spoofing. GNSS services should be made more resilient, and PNT users must diversify their positioning sources. We are now moving into a hybrid world, in which PNT services go far beyond “just GPS” to multi-GNSS services augmented by other PNT technologies, including assisted GNSS, inertial sensors, and terrestrial positioning services. Although diversifying PNT sources increases cost, it may not be as much as some might think. At a recent PNT symposium at Stanford University, Greg Turetzky of Intel predicted even consumer-grade receivers used in automobiles, tablets, and smartphones will embrace all GNSS, despite the added cost in chip size and power.
Setting aside the larger PNT discussion and considering only GPS, what challenges must GPS address to remain the cornerstone of PNT services? Here is my list of the top issues GPS faces today.
Signal Vulnerability. Since the issue of GPS vulnerability was raised in the 2001 Volpe Report, this issue has not changed, but the stakes have risen much higher. There is greater dependence on the GPS service than ever before, with over a billion users. It is generally conceded that for many applications, reliance on GPS in its current form is insufficient and even risky. Brad Parkinson espouses the mantra of protect, toughen, and augment GPS, focusing on steps necessary to strengthen its service.
Numerous methods are being explored and implemented to protect and toughen GPS: increased signal power on modernized satellites, improved antennas, and authentication of the signal against spoofing. The U.S. Department of Transportation is actively seeking ways to protect GPS spectrum through public workshops on GPS adjacent-band compatibility.
The GPS civil signal remains open to malignant spoofing by nefarious forces. Various methods are being proposed to counter this threat. It may seem that adding signal authentication is a bit too late, since civil GPS signals have already been defined in interface specifications, but it turns out this may not be the case. At the Stanford Symposium, Col. Matt Smitham of the GPS Directorate stated that now is a good time to play with the civil navigation message implementations to explore features like authentication. “This is the time to do this, change the message types,” he said. Thus, there is an opportunity to counter this threat.
Gaps in Service. A low-power service that has limited operation in many settings, GPS does not provide full functionality at the Poles, nor does it work indoors or underwater. This issue is exacerbated by society’s demands for PNT services anywhere. The 2008 National PNT Architecture identified these gaps as a primary concern, encouraging numerous actions to resolve them.
Split Leadership. Although the Space-Based PNT Executive Committee and its National Coordination Office provide a mechanism for establishing high-level policy and providing outreach, they fall short of meeting other essential needs for acquiring, operating, and sustaining GPS. Funding for GPS is split between a number of departments and agencies including the DoD, DOT, the FAA, and NASA. The net effect is prioritization decided by individual departments and agencies, but not by the GPS leadership itself. Thus, some programs get funded by Congress, such as satellite and control system acquisition and the FAA’s NextGen program, but others do not. Civil signal monitoring and complementary PNT services to support increased PNT resilience have not been adequately funded. GPS operations experience the tragedy of the commons: GPS civil signal formats are defined but service standards and management protocols are not.
How to Manage GPS for Today
Resolve GPS vulnerabilities by strengthening the system and augmenting the service. Take the lead in addressing system vulnerabilities, including mitigating jamming and interference, and installing protections against spoofing. Hold forums on authentication means and methods, and fund research demonstrations using pre-operational civil signals.
Work to close the gaps in service. Implement reduced-cost-impact, easily accessible complementary technologies to fill GNSS gaps. Implement civil signal monitoring using alternative networks until the Next-Generation Operational Control System incorporates civil signal monitoring requirements.
Establish even closer cooperation between military and civilian leadership to provide unified funding, acquisition, and operations. Ensure a unified message to Congress for multi-agency funding needs. Work together to implement new civil signals, including operational protocols. Set dates cooperatively and meet them.
The GPS program produced a revolution in ubiquitous positioning, navigation, and timing that cannot be stopped. Care must be taken to ensure its services continue to benefit mankind while its vulnerabilities do not cause undesired harm to its users. With thoughtful planning and execution, GPS leaders will succeed.
John W. Lavrakas is president of Advanced Research Corporation, providing expertise in global positioning systems, having spent the past 34 years in GPS, working in its command and control, user operations, GPS receiver development, and satellite navigation performance analysis. He can be reached at [email protected].
I attended the China Satellite Navigation Conference in Nanjing in May, the fifth year of CSNC and my third time attending. Tremendous progress was evident this year in terms of BeiDou (BDS) deployment and China’s general openness and willingness to collaborate over those years. I have also seen a slowly growing international presence at the show and expect that to continue to increase as well. You may recall my column last year about Little Tigers. Well, they aren’t so little any more. As for the tycoons, you will have to read to the end.
The conference opened with the usual provider updates. Chenqi Ran, who runs the China Satellite Navigation Office, the lead government agency for BDS, started off. It’s always good to hear his update delivered in China, where the is a little more freedom to provide information beyond the standard pitch. China continues on pace to its plan for the third step of BDS with five geosynchronous-orbit, three inclined geosynchronous-orbit, and 27 mid-Earth orbit satellites for a worldwide system by 2020. They are meeting their stated goal of 10-meter accuracy regionally today, and as good as 5-meter near the Equator. Ran also provided interesting numbers for the fast-growing Chinese domestic market:
More than 2 million BDS chips sold in China in Q1
More than 300,000 vehicles equipped with BDS
20 domestic brands offering car navigation systems
First consumer tablet (Samsung Galaxy Note 3) with BDS.
First consumer smartphone (Huawei B199) with BDS
The updates from other providers (GPS, GLONASS, and Galileo) were relatively standard and did not contain much new information. I had hoped that maybe the Russian presentation would provide more information about the April outages, but nothing was forthcoming and I was not overly surprised.
The conference itself is very well organized and runs nine parallel technical tracks over two full days, with additional special-interest sessions. All of the presentations are in Chinese, however the conference provides headsets for simultaneous translation, and many presenters have dual slide sets in Chinese and English, so it is easy to attend anything that seems interesting.
I came as an invited speaker on the Institute of Navigation (ION) panel organized by Professor Jade Morton from Miami University, Ohio, and Professor Lu of the National Timing Service Center near Xian. The ION panel was well attended and included a short panel discussion at the end.
One of the most interesting outcomes was that both Broadcom and Trimble showed approximately 25 percent accuracy improvement by adding Beidou to their existing GPS/GLONASS solutions. It was interesting not just because they reached the same number, but because Broadcomm was talking in meters about urban-canyon performance and Trimble was talking in centimeters about precise positioning.
It became clear that everyone sees BDS as an important part of their roadmap at L1, regardless of how many frequencies they currently support. I must also note that both Professor Morton and Professor Lu were outstanding hosts and showed us some of the wonderful local sites.
Exhibit Hall
The biggest change from last year was in the exhibit hall. I would estimate the overall floor space grew by 50 percent, with 106 companies in specially designed booths (up from 56 last year) and another 44 in standard booths.
The content change was even more dramatic. Last year there were a lot of small booths with pretty basic displays, mostly of prototypes and slideshows. This year, there were many more extremely large booths that were very professionally created. They had evolved into displaying very polished-looking finished products with nicely edited videos. It was clear that this was all targeted at domestic buyers, as it was difficult to find anyone on the show floor who spoke English (except in the Spirent booth). These are no longer little tigers. These are now real companies, out hunting for new business.
Policy and Intellectual Property
My other favorite topic to listen to at this conference is on policy and intellectual property (IP). That is where I spent most of my time and was not disappointed. There was in fact an entire session dedicated to intellectual property, and several presentations on the global state of affairs of patents in GNSS.
Interestingly, most of the speakers were either lawyers or from government, but there were some corporate ones as well. Several speakers highlighted the recent disagreement and settlement of the patent dispute between the United States and the United Kingdom over complex modulation patents. There was a large element of underlying concern that although the U.S. had been able to settle the dispute, it might be very hard for China if either the U.S. or the UK came after them. They had several charts showing how far behind they were in GNSS patents, in an effort to encourage local companies to create more IP and patent it. They also showed they have made significant progress in recent years in domestic Chinese patents, though they still have a long way to go in international patents.
They were also very concerned about the largest holders of GNSS patents in China — Qualcomm and Broadcom — as a threat to domestic industry. They cited the GlobalLocate/Broadcom versus SiRF/CSR lawsuit as a cautionary tale. Several presenters showed the dominance of Broadcomm and Qualcomm in terms of domestic Chinese patent holdings and referred to them as the “Tycoons.” I envisioned Rich Uncle Moneybags, the guy from the Monopoly game wearing the top hat, walking around with patents instead of dollar bills hanging out of his hat.
Conclusion
The little tigers have definitely grown up. They are much bigger, have real teeth, and are definitely trying to stake out territory in the fast-growing domestic market. But the Tycoons still have the upper hand in the mass-market battle for consumer devices. For the moment, anyway.
The Tycoons are going to have to start spending some of their bounty in China if they want to maintain that market share against rapidly evolving domestic competition. I won’t be surprised if next year we see the Tycoons exhibiting at CSNC, and soon after that, the tigers looking to expand their hunting ground into nearby markets in Korea, India, and Japan.
Greg Turetzky is a principal engineer at Intel responsible for strategic business development in Intel’s Wireless Communication Group focusing on location. He has more than 25 years of experience in the GNSS industry at JHU-APL, Stanford Telecom, Trimble, SiRF, and CSR. He is a member of GPS World’s Editorial Advisory Board.
The statements, views, and opinions presented in this article are those of the author and are not endorsed by, nor do they necessarily reflect, the opinions of the author’s present and/or former employers or any other organization the author may be associated with.
Unmanned aerial vehicles (UAVs), or as most civil aviation authorities now call them, unmanned aircraft systems (UASs), are attracting a lot of attention lately from geospatial professionals. Common questions in their minds are:
What applications can I use it in?
What benefits can it provide to my organization or my clients (or data users)?
How do I implement such a system in my organization?
This article will cover the first two questions, while addressing some of the third as well.
High-Level System
Unmanned aircraft are either a fixed-wing (plane) or a multi-rotor (helicopter) design. Typical fixed-wing UAS available today are equipped with wide-angle cameras that fly about 100 meters, more or less, above the ground. Multi-rotors, with their ability to hover, move vertically — and even fly in reverse — may sometimes be operated at lower heights above ground. A greater diversity of sensors are being developed and offered specifically for small UAS platforms. Some of these include near-infrared cameras, miniaturized laser imaging detection and ranging (LiDAR) scanners, and even sensors that enable hyper-spectral or multi-spectral capabilities. The typical system runs on electrical power, and flights last between 30 and 60 minutes, often less for multi-rotors because of the greater amount of energy needed to achieve a mission. Depending on the endurance and speed of fixed-wing aircraft, typical coverage is around 1 to 1.5 square kilometers (100–150 hectares). For multi-rotors the area covered is much less; it could be as little as 10 percent to as much as 30 percent of what can be achieved with a fixed-wing UAS.
UAS image-processing is usually done using close-range photogrammetric techniques adapted to exposures taken in flight. This allows accurate construction of photogrammetric models that approach the quality achievable with much more sophisticated manned aerial systems flying at much higher altitudes.
With these technologies, photomosaic, orthophotographs, digital terrain models (DTMs), digital surface models (DSMs), and point clouds can be output. Without ground control, the models have decimeter-level internal consistency in X, Y, and Z. With much sparser ground control than is typically required for conventional photogrammetry, good-quality models with centimeter-level accuracy registered to the ground control can be rapidly generated at much lower costs than most other methods of achieving similar results. That, however, doesn’t make today’s UASs a solution for all aerial surveying and mapping situations; but where their application is appropriate, they bring benefits that are sometimes unique.
Some of the more common applications of UAS-based mapping appear in the two-part table here, with a limited set of users and data consumers for each type, and special benefits that may be unique to UAS aerial imaging.
Superior Adaptability. UAS aerial imaging can provide flexibility unsurpassed by other technologies. Portable equipment that can function in a wider variety of adverse weather means that mapping can be done closer to the time of need. Because mobilization and flight cycles are short, flights can be done hourly or more frequently in urgent situations such as floodwater or fire tracking. Cloud cover is rarely a problem as unmanned aircraft typically fly below the clouds.
In fact, in some parts of the world it is being considered as the only mapping tool for aerial mapping as the weather, availability of aircraft, other equipment and trained personnel rarely coincide to allow opportunities for conventional aerial mapping. When focused areas need to be mapped with timely generation of data products under conditions — weather, hazard limitations, or closely spaced visitations — that test the capabilities of other tools, the selection and successful use of UAS in such situations is only limited by the solution-provider’s creativity.
Regulatory Framework. Operational issues and working within a nation’s civil aviation regulatory framework must be examined in detail before an organization decides to acquire and fly UAS for geospatial applications. UAS flying is highly process-oriented. It involves much more planning and preparation than the typical use of ground-based technologies involves. Training of flight crews and data processing teams is more than just an up-front investment. It is necessary for flight crews to maintain current skill levels through non-revenue flights if the revenue flight schedule is widely spaced in time.
The state of regulations vary from country to country, but fliers in any locality must also be aware of the restrictions on flying in the national airspace that may have been imposed by the civil aviation authority that covers sub-sections of the airspace or that restrict how or where an UAS may be flown. This includes restrictions on flights near airports and aircraft routes, flights over populated or urban areas and maximum and minimum flying heights over ground level. A common limitation is to restrict flights to areas that are within visible line-of-sight of the UAS pilot.
UAS are not a panacea for all mapping problems. Satellites, high-altitude photogrammetry, fixed-ground, mobile terrestrial and manned aircraft LiDAR, and ground-based techniques all have their place, especially when large areas are to be mapped at widely spaced time intervals. But geospatial data managers will be surprised to see how nagging problems — as well as some they didn’t recognize as problems — can be solved with UAS-based mapping.
Peter Cosyn is site manager and director of research and development of Gatewing, a Trimble company. He is a co-founder of Gatewing, which was launched in 2008. Cosyn earned a Ph.D. in electromechanical engineering from Ghent University. He has more than 10 years of experience in unmanned aircraft system design.
By Tim Reynolds, GPS World’s contributing editor for Europe
This spring, two Brussels conferences focused on new possibilities and modes of transport enabled by satellite navigation, showing the added value delivered by current and future European GNSS solutions.
The European GNSS Agency (GSA) hosted the first gathering in February, discussing its GNSS Applications Action Plan in areas relating to road transport including smart tachographs, long-range buses, transport of dangerous goods, multimodal logistics, and road tolling. The 11th Annual Road User Charging Conference (RUC) in March, an industrial gathering, highlighted recent developments in truck tolling and a possible future breakthrough for lighter vehicles.
Huge Market
The GSA identified the road sector as the largest GNSS market segment (with location-based services) in its October 2013 Market Report. Most GNSS devices were already enabled for European GNSS services, either via EGNOS or Galileo. Developments such as lower costs for connectivity, growing numbers of embedded devices, intelligent transport systems (ITS), and vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, together with new European Union policies and regulations, drive new requirements for vehicle positioning, and GNSS technologies are poised to fulfill these.
In two specific policy areas, road tolling and eCall emergency response, GNSS shows particular promise for adding value and providing flexible solutions. The GSA manages a large portfolio of research and innovation projects to develop near-market applications in this area.
e-Freight
E-Freight, a vision of a paperless freight transport system where electronic data flow is linked to the physical flow of goods, can lead to future intelligent-cargo concepts to further automate and improve logistics. Positioning services naturally form an integral part of this concept. The increased availability, resilience, integrity, and accuracy offered by European GNSS will support the uptake and efficiency of e-Freight systems through georeferenced cargo-status monitoring, among other services, seamlessly delivered across transport modes and national borders.
Road Tolling
The GSA delivered its perspective on road tolling in advance of the later industrial conference. Location-based charging offers flexibility, easy extension of schemes, low transaction costs, and — most promising from an agency point of view — could have a big impact on traffic management and environmental policy. GNSS is becoming the technology of choice for free-flow road tolling with its three main advantages: coverage, availability, and no direct installation costs.
The final GSA presentation focused on authentication services offered by Galileo to benefit the next-generation digital tachograph, a device fitted to a vehicle that automatically records its speed and distance, together with the driver’s activity selected from a choice of modes. New government proposals for the digital tachograph will mandate the inclusion of GNSS technology.
Clearly, a tachograph requires a robust and trusted GNSS service that is also very low-cost and resilient against spoofing and other interference. An authentification signal provided via the Galileo Open Service could provide a suitable solution free of charge, offering global coverage and easily initiated in existing Galileo-enabled receivers and terminals when the service was introduced. There is growing interest in such a service and its market potential from a range of stakeholders.
Road-User Charging
GNSS should be a key enabling technology for a scalable and cost-effective approach to fair and flexible road charging. But despite its great promise, implementation of such schemes have proven difficult on both sides of the Atlantic.
GNSS-enabled road-use charging systems now operate in Switzerland, Germany, Slovakia, and Hungary for heavy-goods vehicles (HGVs). Plans are in hand for a similar scheme in France covering 15,000 kilometers of national roads. Russia aims to introduce a GLONASS-mandated operation, initially for 50,000 kilometers of federal road and perhaps half a million kilometers of regional roads.
Belgium plans a HGV GNSS-enabled system to start in 2016, initially using GPS and GLONASS signals, eventually covering its full 150,000-kilometer road system. On-board units (OBUs) will be mandatory, and the system will have the capacity to define up to 10,000 toll rates dependent on factors such as location, time of day, direction of travel, road, and vehicle category.
Factor of Seven. The flexibility and scalability of a GNSS-based charging system was demonstrated by the SkyToll organization that operates the road-user charging scheme for HGVs in the Slovak Republic. This system’s network coverage has recently been extended seven-fold from main motorways and major roads to encompass 17,762 kilometers, effectively bring all motorways and class 1, 2, and 3 roads under charge.
To achieve this with a terrestrial system would have required the construction 4,000 gantries, but the huge expansion was built using software in three months. “This is only possible via GNSS,” stated spokesperson Miroslav Bobošik.
The two-way communications possible with GNSS-enabled OBUs also meant that tariff and network models could be updated and amended quickly and easily. Charge collection efficiency exceeds 99 percent and is independent of road type. “There is a clear trend to GNSS-enabled systems due to their flexibility, efficiency and fast implementation,” said Bobošik.
Belgium First? On the first day of the RUC conference, a Flemish regional government spokesperson described plans for the Belgian road-user charging system for HGVs heavier than 3.5 tonnes that could be launched across the whole of the country in 2016.
In parallel to these developments for HGVs, a major pilot project for lighter vehicles, that is, passenger automobiles, has just started in Belgium’s GEN-zone. This area is effectively the capital city, Brussels, and its surrounding provinces of Flemish and Wallonian Brabant. The pilot will test the practicalities of a GNSS-enabled mileage-based charging system and involves 1,000 selected participants in a three-month trial. First results will be available in April, and the final report is due in the summer. This report will form the basis of future national policy on road-user charging and will likely be on the desk of the new Minister for Transport when he or she takes office after the upcoming Belgian elections.
If the political will is there — and post-election the necessary political capital may well be in place — could Belgium become the first nation to implement a GNSS-enabled road-user charging scheme for all vehicles as early as 2016? Watch this space!
Tim Reynolds is director of Inta Communication Ltd. and a long-term Brussels observer writing on many aspects of European government policy and implementation for a range of clients and publications. The material presented here was first prepared in a somewhat different form for the GSA.He is the contributing editor for GPS World’s new quarterly e-newsletter, EAGER: the European GNSS and Earth Observation Report. Subscribe free at env-gpsworld-integration.kinsta.cloud/subscribe.
In the mass market, individuals around the world are creating vast quantities of location data and GPS traces using not only GPS, but also Russia’s GLONASS, Europe’s Galileo, China’s Compass, and India’s Regional Navigational Satellite System. The value of this data and the value chains that produce it will increase significantly with an increase in interoperability of these satnav systems. Currently, non-interoperability represents a serious obstacle to the growth of the GPS market.
The overall system-of-system’s diversity of data formats, data models, processing models and associated custom- built one-to-one communication interfaces significantly inhibits introduction of new subsystems and also new GPS-dependent systems that would support development of future classes of stakeholders. “Many-to-many” networks based on open standards can create interoperability as well as opportunities for the introduction of new technologies, value-added data products, and new users.
To address this problem, sponsors of the 2012 Open Geospatial Consortium (OGC) OWS-9 Interoperability Testbed, including the U.S. National Geospatial-Intelligence Agency (NGA), documented a set of use cases and associated interoperability requirements, selected strategically to address problems whose solutions would be applicable in a wide variety of GPS value chains.
Technology providers participating in the testbed then implemented standards-based solutions that addressed the requirements. These were documented in a draft Engineering Report, “Use of SWE Common and SensorML for GPS Messaging.” The document focuses on the use of the OGC Sensor Web Enablement (SWE) Common Data 2.0 encodings to support an interoperable messaging description and encoding for the next-generation GPS message streams into and out of processing services that provide improved GPS navigation accuracy.
Standards. The OGC Sensor Web Enablement (SWE) suite of standards specifies models and XML encodings that provide a framework within which the geometric, dynamic, and observational characteristics of all types of sensors and sensor systems can be defined.
Furthermore, through standard web-service interfaces, one can task sensor and actuator systems and have immediate access to observations and alerts. SWE standards, now widely implemented around the world, enable developers to make all types of networked sensors, transducers, and sensor data repositories discoverable, accessible, and usable via the Web or other networks. OGC standards are downloadable at no charge, for use by anyone.
OGC Testbed
The OGC OWS-9 testbed’s OWS Innovations thread included a hands-on prototyping activity that addressed a particular set of interoperability requirements related to GPS accuracy.
GPS relies on accurate knowledge regarding the position, measured time, and state of the satellites, provided to GPS devices and processing centers in the form of satellite ephemeris data and status reports. The accuracy of the system relies on communication between the satellites themselves, the data collection systems, the data processing centers, and the GPS devices that ultimately determine their own location. This communication is through various data streams that consist of predefined message structures and encodings.
The accuracy of the positions derived from GPS can be negatively affected by several well-known factors. Improvements to the derived positions within the current operational system can occur (1) through occasional (once a day or once every few hours) updates to the satellites’ clock and ephemeris on-board information, or (2) through post- processing for applications such as geodetic surveying or image processing and georectification. Efforts are underway to provide more timely updates to satellites or positioning devices to improve the accuracy of positioning in real-time.
The GPS Correction Process
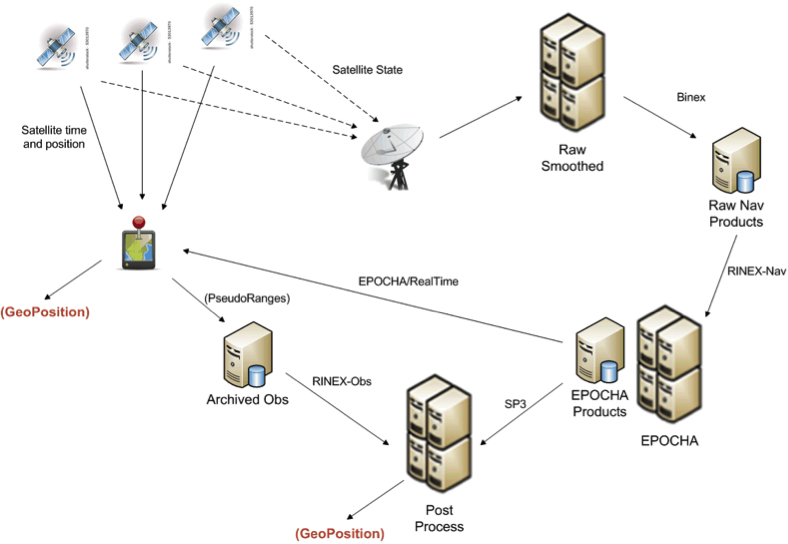
One view of the current system for correcting GPS positioning is provided in Figure 1. A GPS positioning unit (shown as a device with red thumb tack) receives signals from four or more GPS satellites derives its position. In addition, the information being sent by all satellites in the GPS system is also received at various receiving stations, stored as raw navigation data, and used to correct the clock and position information for all of the satellites. The correction process can utilize one or more operational processing systems for correcting satellite clock and ephemeris information. Each of these systems tends to utilize particular data sources and often output their results in different message structures and encodings.
FIGURE 1. Typical flow of data within the GPS correction system.
One such system for correcting the timing and positioning of GPS satellites is Estimation and Prediction of Orbits and Clocks to High Accuracy (EPOCHA). Currently, navigation and timing improvements are only uploaded to the satellites and GPS devices once a day. To improve the EPOCHA system, the National Geospatial Intelligence Agency (NGA) is researching the logistics and benefits of updating the navigation and timing information at much shorter time frames (for example, every 2–15 minutes).
The corrected satellite clock and state data can then be sent to the satellites, to the processing centers to improve geolocation of real-time or archived positions or remotely sensed observations, and to devices in the field to improve real-time position measurements.
A processing system in widespread use for applying these corrections to positional measurements is the open-source GPS Toolkit (GPSTk). This software was used in OWS-9 to demonstrate the processing of SWE Common encoded GPS data within a Web-enabled environment.
As shown in Figure 1, the data flowing between archiving and processing components exist in a wide variety of formats. Currently, these message streams consist of message structures defined through various documents, some of which have restricted access. Additionally, these streams and the messages they contain are being encoded in various formats, including, for example, a binary exchange format (BINEX), a system-specific XML schema, an HDF5 file format, several text-based formats, and others.
The message components within each of these formats are inconsistent, even though two messages may describe similar information. Often a processing system is required to read data and output results in multiple formats and to understand the inconsistencies between them.
By forcing different software and processing systems to support multiple message structures and data formats, the current system inhibits the effective use of these data by:
requiring several format-specific readers and writers to be developed in the appropriate software language (C, C++, Java, Python) as required by each application system;
providing inconsistent message structures between the data used or produced by different processing systems;
requiring meticulous and thus error-prone human interpretation of the data components based on the limited documentation provided for each;
creating lack of interoperability with regard to using data designed for or produced by a different particular processing system; and
discouraging development of new and innovative software and processing solutions.
The Engineering Report addresses the feasibility of using the OGC SWE Common Data v2.0 standard to support all message and data streams within future generations of the GPS operational network. In particular, the effort focuses on message streams that provide input to and output from the processing systems responsible for providing improved position and time accuracy within the GPS network.
Here are the benefits of the SWE Common Data standard:
The data can be fully described in a machine- and human- readable XML document providing: data type, units, constraints, semantics, quality, labels, and so on; and an unambiguous definition of both the data structure and encoding of messages/records.
The data values themselves can be encoded in highly efficient binary or ASCII text blocks or streams.
A single software application is able to read any data described in SWE Common data.
Any process can be described in SensorML using SWE Common as inputs, outputs, and parameters.
Any SensorML-defined process can participate in easily-defined executable workflows.
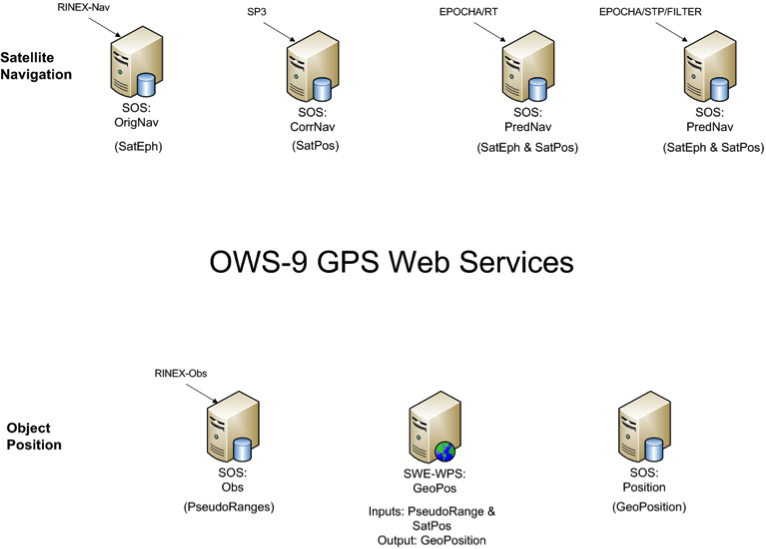
The Engineering Report describes the formats and how they were encoded, and the Web services created to move data between various GPS processing systems (FIGURE 2).
FIGURE 2. Collection of SWE services providing on-demand access to all GPS-related data in the project.
Conclusions
A common standards framework for all data files and streams within the GPS system would significantly improve interoperability between data centers, processing centers, and user tools.
In addition to a common encoding, common models for equivalent message or data records would also be important for interoperability among data, processing centers, and the tools. Common models and a common data framework enable rapid reconfiguration of workflows using different GPS processing products. Likewise, the availability of a common Web service interface enables one to rapidly and flexibly request specific data products and feed them into an executable workflow.
Here are further benefits:
SWE Common Data framework is fully self-described and machine readable.
Common models for all data would support “mix-and-match” capabilities within the processing workflows.
SWE Web services enable on-demand access to various GPS data products using a common framework.
SWE Common Data enables use of SensorML for readily defining and executing various workflows on demand.
Future Directions
Further research and development should move closer to a highly interoperable GNSS system that meets the needs of a broader community of users and enables the development of new supporting software by outside communities. Thus the following are recommended:
Design and reach consensus on consistent data models for all message types in navigation, observation, and state data streams.
Incorporate SWE Common Data readers/writers in the GPSTk toolkit.
Create SensorML descriptions for GPSTk apps.
Demonstrate on-demand design and execution of SensorML-defined workflows for GPS correction.
Demonstrate on-demand geolocation of UAV, ground-vehicle, and hand- held sensors using SWE services and encodings.
Some of these needs will be addressed in the OWS-10 Testbed that is currently ramping up in the OGC.
MIKE BOTTS is president and CTO of Botts Innovative Research, Inc, specializing in the design and application of open standards for sensor systems. He is the creator and chief architect of Sensor Model Language (SensorML), an OGC technical standard for describing the measurement and processing of observations from virtually any sensor system.
Highly precise and free for use by anyone with an inexpensive receiver, GPS and other GNSS are great. Their navigation and timing signals have been incorporated into nearly every aspect of modern life, from synchronizing power grids to financial systems, the Internet, telecommunications, and transportation. The U.S. Department of Homeland Security estimates that these signals are used by all 16 of U.S. critical national infrastructure sectors, and are essential to the functioning of 11.
Jamming Threat Growing. When these faint signals can’t be received, people start to feel the impact immediately. Usually outages have minimal impact because they are localized and short-lived. Often they occur because the user is temporarily in an area without a good view of the sky. More and more often, though, they are due to the presence of one of a growing number of people with jamming devices (many of which also block cell phone frequencies).
Inexpensive, easy to obtain, and illegal, jammers are spreading as people become more concerned about privacy and being tracked by their employer, spouse, the National Security Agency, and others. Although the government tries to collect information on jamming incidents, no widespread detection system has been established, and few verbal reports are received. For the calls that do come in, it is often impossible to determine which are because of user error and which are purposeful interference.
For those cases where jamming is discovered, locating and identifying the perpetrator is difficult and often impossible. As one example, in spite of near-daily disruption of GPS that caused the shutdown of a new landing system at Newark International Airport, it took the Federal Aviation Administration and the Federal Communications Commission more than two years of concerted effort to identify the single perpetrator.
If a navigation satellite outage became widespread and lasted more than a few hours because of a major solar flare, software problem, hacker or cyber-attack, most authorities agree that the impacts would be catastrophic. While much of the information is classified, we do know that transportation would immediately become much less efficient and more dangerous; even many traffic lights are coordinated using satellite timing. Telecommunications, financial, energy and other systems would soon begin to fail as their back-up timing systems lost synchronization with each other. Power grids would lose synchronizations and outages may occur as transmission points became overloaded.
More than speculation, these problems have been documented in academic papers, proven in government tests in the United States and the United Kingdom, and the early stages of such impacts have been observed in localized and short-term outages in the United States. Most dramatically, they have been demonstrated by North Korea’s intentional jamming of South Korea.
Spoofing. Of equal concern is the problem of spoofing. The world’s preeminent ethical spoofer of satellite navigation receivers, Todd Humphreys of the University of Texas, Austin, has demonstrated how easy it is to take control of unmanned aircraft and ships on autopilot by sending a slightly stronger navigation signal, making the receiver think it is somewhere other than where it is. Iran claims to have done something similar, capturing a U.S. military drone in 2010. Humphreys has also shown (on paper) how time-stamps on automated financial transactions could be altered through spoofing. This could do things like reverse the buy-sell equation at a stock exchange, allowing someone to sell at a higher price before buying at a lower one.
The Government Solution
What is to be done? The challenges have been extensively documented and discussed since at least the 1990s. In 2004, President Bush issued the National Space Policy (NSPD-39) that addressed the problem. Although portions of it are still classified, contained within the publically releasable section was direction for the U.S. Department of Transportation (DOT) to, in coordination with the Department Homeland Security (DHS): “develop, acquire, operate, and maintain backup position, navigation, and timing capabilities that can support critical transportation, homeland security, and other critical civil and commercial infrastructure applications within the United States, in the event of a disruption of … space-based positioning, navigation, and timing services.”
eLoran Recommended. In response, the two departments consulted numerous experts and commissioned a study by the Institute for Defense Analysis (IDA) to determine what system or systems should be procured. The IDA study team, which included Brad Parkinson, widely recognized as the father of GPS, unanimously recommended that an existing and outdated nation-wide navigation system called Loran-C be greatly updated and modernized to eLoran. Such a system would provide a navigation and timing signal comparable with and complementary to GPS. They concluded that:
“eLoran is the only cost-effective backup for national needs; it is completely interoperable with and independent of GPS, with different propagation and failure mechanisms, plus significantly superior robustness to radio frequency interference and jamming. It is a seamless backup, and its use will deter threats to US national and economic security by disrupting (jamming) GPS reception.”
What the IDA did not find, but that has since become evident, is that establishing an eLoran system could be an important part of a network to identify and locate jamming attempts. Since all eLoran transmitters would be synchronized with GPS, and many navigation receivers would have both GPS and eLoran sensors, differences between the two systems could be immediately detected and reported.
The body in charge of coordinating navigation and timing issues for the federal government is the National Space-Based Position Navigation and Timing Executive Committee (NPEC). It is chaired by the Deputy Secretaries of Transportation and Defense. Responding to early briefings on the IDA report (which was not formally published until 2009), the Departments of Transportation and Homeland Security in 2007 told the NPEC that they had decided eLoran was the right answer. After further federal deliberations over how to create an eLoran system, 2008 saw:
A press release by DHS saying that the department would implement eLoran, using the old Loran-C infrastructure (February 7, 2008)
The DHS 2009 Budget in Brief (February 2008) propose transferring legacy Loran-C systems and $34.5 million/year from Coast Guard to the National Protection & Programs Directorate (NPPD) within DHS, stating:
“The FY 2009 budget transfers the budget authority for the LORAN C system from the United Sates Coast Guard to the NPPD. The Department, acting as Executive Agent, will begin development of enhanced eLORAN as a backup for GPS in the homeland.”
The National PNT Executive Committee endorse the above decisions (March 2008).
Failure to Launch
Unfortunately, DHS funding for 2009 came as part of a continuing resolution, and the Congress did not see fit to approve the transfer of funds from Coast Guard to NPPD.
This was because influential members of Congress wanted the nation to have eLoran, but were concerned about the lack of a plan for transition of this important capability from one agency to another. The administration was asked to develop and submit a plan with with the next budget cycle. A year later, though, no plan had been presented, and the President’s request (and enacted legislation) for 2010 contained no request to move and upgrade the system. In fact, it contained provisions for shutting down and defunding the old Loran-C system without providing funds for NPPD or any other agency to establish the new eLoran capability.
No Solution at All. What happened between one budget year and the next to take the nation from “solution-in-hand” to “no solution at all” is not a matter of public record. Internal administration budget deliberations are not generally released to the public. It does appear, though, that a new administration putting together its first real budget quite rightly wanted to shut down an antiquated system, but did not understand the importance of a new one. This, and many other factors, unquestionably played a role.
Movement Backward
Without any funding, DHS has since conducted several studies and experiments, but has done very little of substance to address this critical infrastructure issue. While Department of Defense (DOD) officials talk about the need for resilience, experts throughout government and industry decry the lack of action, and the Department of Transportation still has acquiring “backup position, navigation, and timing capabilities” on its to-do list, none have seen fit to move forward on their own.
Felling Towers. Worse, DHS is actually reducing the nation’s ability to create eLoran and a wide-area interference detection and mitigation system. An ongoing effort to fell towers and dispose of equipment from the legacy Loran-C system will significantly increase the cost and time-to-operation of the new system the nation needs.
The Way Forward
Fortunately, awareness and understanding of the problem within government, and the general public has continued to grow.
The U.S. National Space-Based Positioning, Navigation, and Timing (PNT) Advisory Board published a seminal white paper in 2010 on the topic, strongly recommending the establishment of an eLoran system. Todd Humphreys, the UK navigation authority, and others have provided numerous graphic demonstrations of the folly of relying upon just one electronic navigation system, and how things can go horribly wrong. Some of these have been well publicized. Other incidents are known only to a few.
There are also signs that the U.S. intelligence, cyber, and defense communities are becoming more and more concerned. North Korea’s repeated jamming of satellite navigation and timing signals has delivered a particularly powerful lesson. South Korea has reacted by committing to establishment of a robust eLoran system. The UK has established an eLoran system and is expanding it. Russia and China have retained their versions of Loran-C and are using it to augment satellite services. Russia has announced it will upgrade its system to eLoran in cooperation with the UK, and China may not be far behind. Saudi Arabia is upgrading its system to eLoran, and India has plans for an eLoran network in the near future. In December, Iran announced it has established a land-based system with “powerful transmitters” that is “completely different with GPS.”
Allies, adversaries, and economic competitors are augmenting satellite services with strong terrestrial ones. The United States will soon be one of only a small number of major economies that does not have a strong, difficult-to-disrupt terrestrial system protecting its critical infrastructure and providing value-added utilities. DOD’s chief information officer expressed interest in eLoran as part of DOD’s pivot to the Pacific. But providing a system at home is not in Defense’s job description, nor should it be.
Respected leaders at the Departments of Transportation and Homeland Security still see this as an important issue that needs to be addressed. The question for them now is not one of technology. The technology decision made in 2008 has since been revalidated by a plethora of academic papers, risk estimates, and white papers. eLoran still appears to be the most effective and least expensive solution available. DOT and DHS must resolve questions of governance and how to fund the system in one of the most difficult federal budgetary climates in decades.
How? The answer could lie in a public-private partnership (P3). In such an arrangement, the government would bring its interests and the infrastructure it owns to the table. An entity in the non-profit sector or industry would provide investment to refurbish the infrastructure, stand up, and operate the system. Such a P3 enterprise could not only pay for itself, but be an on-going source of revenue for both the government and the private entity.
The Business Model: Demand
A well-configured eLoran system can provide navigation accuracy to within 8 to 10 meters and timing accuracy to within 30 nanoseconds. This meets the needs of an estimated 95 percent of users in the United States. While eLoran does not offer the sub-meter precision of a high end, augmented GPS/GNSS system, it has its own advantages. In addition to being very difficult to disrupt, its high-power (typically 400 kW transmitters), low-frequency (100 kHz) signal easily penetrates and is usable underground, inside buildings, and underwater — where satellite and cell phone signals on much higher frequencies cannot reach.
The UK experience with eLoran and private surveys in the United States have shown high commercial demand for a ubiquitous, wireless, precise, and resilient time and navigation service. Power companies want to synchronize grids with a signal that can’t be disrupted by a delivery driver trying to avoid being tracked by his boss. Cell phone companies would be happy to have alternative timing capability in their networks, provided through inexpensive eLoran receivers. Operators of autonomous vehicles want a robust navigation signal and guaranteed communications. And it would be welcomed by the many users who, research shows, rely upon GPS/GNSS time for mission-critical applications, and who have no secondary source on which to fall back in the event of a disruption.
Since eLoran easily penetrates inside buildings, underground, and underwater, it can be used for timing and navigation in many places where no other navigation and timing sources are available. For example, it has been used for underground and underwater navigation. When paired with an accurate satellite signal before going underground or submerging, eLoran could enable a navigation receiver to maintain a comparable level of precision for several hours. Even after that, it would provide the navigator an accurate underground/underwater compass, and a good position.
The eLoran navigation and timing system now in operation in the United Kingdom also generates revenue by transmitting data. While the full potential of this third-party data-channel capability is still being explored, the ability to assure data delivery to, and communicate with such areas is appealing to many commercial and government organizations. Potential first-responders and commercial benefits appear almost limitless.
The Business Model: Costs
The cost for the P3 to standup and operate an eLoran system in the United States would be exceptionally low. Most of the needed infrastructure is already owned by the federal government in the form of the sites for the shuttered Loran-C system. Many of these still have transmission towers and other equipment that could be repurposed. Re-using this infrastructure and equipment would greatly reduce both the time and expense needed, compared to standing up the new system from scratch.
Operating and maintenance costs would also be low. Solid-state equipment, remote monitoring, and other advances in technology make the process of re-establishing a transmission site fairly inexpensive. Today’s eLoran transmitting site consists of a tower, an equipment enclosure for the transmitter, a fence, and a backup generator. With only a modest investment to refurbish existing infrastructure, regular outlays to service capital debt would be minimal, at best.
Some estimates predict that a terrestrial precise navigation and timing system, such as the one established in the United Kingdom and the one up for contract by South Korea, could be established in the continental United States within three years and for approximately $40 million, if the existing infrastructure were repurposed. Operating costs are estimated at approximately $16 million per year.
Business Model: Revenues
Significant national and homeland security concerns, high demand, and low cost (especially compared to any government space program) — clearly, but for a series of unfortunate bureaucratic reasons, eLoran would have been established in the United States, probably as a government-owned and operated system, long ago.
But high demand and low cost are also excellent ingredients for a business enterprise, provided there are sources of revenue. An eLoran P3 could have multiple sources of revenue. Depending upon the type of partnership and business model(s) the government selected, surplus revenue could also be generated to help fund other programs or offset the deficit. Some of the possibilities include:
◾ Guaranteed Delivery Data Transmission. As mentioned earlier, eLoran’s high power and low frequency mean that the signal penetrates where few others will. In addition to navigation and timing information, which are inherent in the basic signal, low-rate data can also be included between the primary pulses. The highest demonstrated data transfer rate to date has been 1300 bps, which is fine for texting and issuing commands. Many believe that, with a modicum of research, that rate can be much higher. As the owner of the high-power transmitter network, the P3 would generate revenue the same as any telecommunications provider: by charging per message or for time on the network.
Applications could include:
• Assured wireless control of remote equipment and vehicles, including indoors, underground and underwater;
• Information delivery to first responders and other crews regardless of location — especially good for pre-programmed emergency and operational commands to evacuate, use another procedure, and so on.
• Immediate device updates and reprogramming. The ability to reach all of the enabled devices on a given network at the speed of light and virtually simultaneously has unlimited potential.
◾ PNT Interference Detection and Monitoring. One of the biggest challenges to countering jamming satellite navigation and timing signals is the lack of a detection network. The eLoran transmitter and receiver network will continuously synchronize with GPS/GNSS signals and instantly detect when differences between the two dissimilar systems occur. Instant reports could be generated to inform federal, state, and local authorities of the anomalies and their locations. Mobile disruptors could even be tracked as they drove down the highway, sailed through the port, or flew across the sky. The P3 could generate revenue by contracting to provide such information to private parties and government agencies concerned about interference incidents.
◾ Licensing Receivers. One of the simplest ways to generate revenue and endow the P3 would be for the government to assess a small fee on every eLoran and satellite navigation receiver sold in the United States. A one dollar fee per unit could generate more than $20 million per year and fund operation of the entire system. Such a fee could be discontinued as other sources of revenue from the system made it unnecessary.
◾ Broad-based User Fees. Since navigation and timing signals are essential to so much U.S. critical infrastructure, a case could be made that the cost to endow the P3 should be spread as broadly as possible across the technologies it supports. For example, a temporary 8-cent fee on every monthly U.S. cell phone and electric bill for just one year could provide enough funding to endow the P3 in perpetuity.
◾ Value-Added Services For High-End Users. More than 90 percent of the users of precise time in the United States require it at the microsecond (1,000 nanoseconds) level of accuracy. eLoran can provide a signal accurate to 30 nanoseconds. To achieve that level of precision, the eLoran network transmits data that compensates for low-frequency signal propagation over non-homogenous terrain. This correction data could be encrypted. Most users would access the signal at the microsecond level of accuracy for free. Revenue could be generated by charging those who desire the higher level of precision a fee for the encrypted portion of the signal.
eLoran is an essential national and homeland security capability. The above list of potential revenue sources is just a sampling of the many ways a P3 could be funded. The point is that financing the enterprise need not come from tax dollars, and should not be an obstacle to its creation.
The Public-Private-Partnership
The U.S. government has had some great successes solving previously intractable problems through public-private-partnerships. Probably the best known of these are the P3s formed for housing on military bases. Establishing a business model that has private partners constructing and managing on-base housing produced more and higher quality housing for our troops.
Such arragnements must be carefully managed, however. Both the Congressional Budge Office and the Office of Management and Budget are understandably concerned that P3s may get a project going, but soon the costs may fall entirely on the government.
Success in any endeavor often depends upon its execution. The type of partnership the government selects and creates will be key. While, at its heart, a P3 is just a contract, the nature and provisions of government contracts are endlessly varied. Issues to address will include how the infrastructure is provided, if it is to be retained in perpetuity by the government or will be conveyed to the private party, what length of contract will allow the private partner to recoup its initial investment, and the business model(s) to be pursued.
The type of governance will also be important. Models vary from establishment of a self-funded government corporation to oversee daily operations, to an agency-supervised, performance-based contract that only requires regular reports on system availability and performance.
Of course, the concerns of CBO and OMB must be met. Fortunately, the federal government is not without experience with P3s. Also, there are many supporting resources available, such as the National Council for Public Private Partnerships.
We Have to Do It
Establishing a public-private partnership will bring together the best of both the government and the private sector. For its part, the government will bring the legacy infrastructure and its interest in safeguarding the public good to the table. The private sector will bring financing, technical know-how and innovation. A better system for America will result than would have been possible if either were to act alone.
It is unquestionably in our urgent national interest to address the problem now, before jamming becomes more widespread, or we have a larger, more damaging event. The need is clear. The technology exists and works great. All that remains is for dedicated leaders within government and the private sector to work together and implement the solution.
Dana A. Goward is the president and executive Director of the Resilient Navigation and Timing Foundation, a non-profit organization devoted to educating people about the need for and encouraging resilient navigation and timing ecosystems with services that complement each other and have different failure modes. See www.RNTFnd.org.