By Jayanta Ray
Aerospace GNSS receivers constitute a class apart, compared to their more popular relatives used in automotive, cell phone, or survey applications. Automotive and cell-phone receivers can sometimes provide position information even in indoor environments. The survey class of receivers provides centimeter-level accuracies. However, neither group can guarantee the reliability and integrity of the position solution, and users rely upon them at their own risk, and only in non-critical applications.
On the other hand, an aerospace GNSS receiver not only provides decimeter-level accuracy, but it also guarantees that the position error is bounded by an integrity limit. The probability that the position error is more than the integrity limit is very rare: one in ten million times.
Now, isn’t that the best class of GNSS receiver?
A certified aerospace GNSS receiver stands as the keystone of the Federal Aviation Administration’s (FAA’s) ambitious NextGen Aviation program for the United States. The FAA developed NextGen to revolutionize the way an aircraft flies in the U.S airspace. In its June 2013 update report, the FAA states that “NextGen is providing major benefits to the general aviation community. The Wide-Area Augmentation System (WAAS) has improved general aviation access to more than 1,500 airports in all kinds of weather with no costly investment in ground infrastructure.”
According to the report, by the end of the NextGen mid-term in 2020, NextGen improvements will reduce delays by 41 percent from today. The FAA estimates that by 2018, NextGen will reduce aviation fuel consumption by 1.4 billion gallons, reduce emissions by 14 million tons, and save $23 billion in costs. NextGen also has an important safety impact for air travelers.
Tens of thousands of aircraft are already equipped with WAAS receivers, which improve the availability, accuracy, and integrity of GPS signals. Pilots take advantage of WAAS technology to fly approach procedures using Localizer Performance with Vertical Guidance (LPV) to altitudes as low as 200 feet. The FAA has published 3,123 WAAS LPV approaches as of May 2013 and expects to publish 5,218 by 2016.
The key to NextGen is the aerospace GPS-SBAS receiver.
How different are aerospace GNSS receivers from commercially available receivers, including high-precision receivers?
An aerospace GPS-SBAS receiver is characterized by very high reliability, accuracy, and availability. Among these attributes, the reliability factor is the most important parameter. Misleading information from an aerospace receiver should be extremely improbable, since that can lead to hazardous or severe major consequences to the aircraft, its passengers, and flight crew.
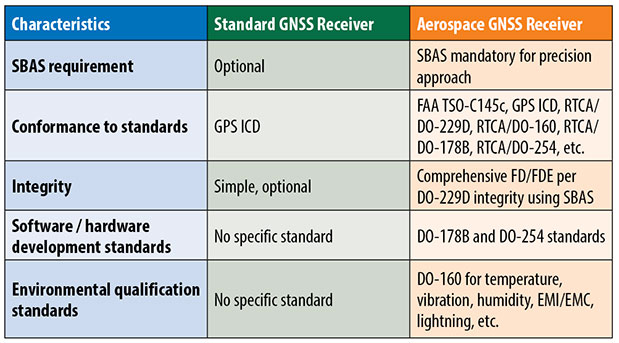
Table 1 shows the major differences between a standard GNSS receiver and an aerospace GNSS receiver.
Performance Requirements
The DO-229D standard document — formally, the RTCA Minimum Operational Performance Standards for GPS/WAAS Airborne Equipment — specifies the minimum performance standards of an aerospace GPS-SBAS receiver. In particular, an aerospace GNSS receiver needs to meet the GPS and SBAS signal processing requirements, GPS and SBAS data/message processing requirements, satellite integrity status requirement, accuracy requirements in presence of interference, dynamic range and sensitivity requirements, and so on, as defined in DO-229D standard.
Most importantly, the receiver must meet the Receiver Autonomous Integrity Monitoring (RAIM) requirements for en-route, terminal, non-precision and precision phases of flight of DO-229D. Additionally, the receiver must meet the fault detection, fault exclusion, missed alert, false alert, step detection, ramp detection, and other integrity-related requirements of DO-229D.
Further, the receiver needs to meet the environmental conditions specified in DO-160 standard for temperature, temperature variation, altitude, humidity, shock, vibration, magnetic effects, voltage spike, EMI/EMC, lightning, and so on.
Safety and Reliability Aspects
A Functional Hazard Assessment (FHA) based on the intended function of the GPS-SBAS receiver software needs to be carried out to determine whether the receiver meets the requirements of hazardously misleading information. The safety and reliability aspects of the receiver are computed through Failure Mode and Effect Analysis (FMEA) and Fault Tree Analysis (FTA). The effects of each failure mode are determined at the system level for each operating mode of the equipment.
RAIM. For an aerospace GPS-SBAS receiver, RAIM is of paramount importance. The measure of protection provided by RAIM is given by Horizontal/Vertical Protection Limits (HPL/VPL). HPL is used as the protection limit for en-route, terminal, and LNAV (Non-precision approach) phases of flight and compared against the Horizontal Alert Limit (HAL) for the phase of flight. Whereas, VPL is compared against the Vertical Alert Limit (VAL) for the LNAV/VNAV and LP/LPV phase of flight.
The most critical part of the integrity requirement is to detect a satellite failure and, if possible, to make corrective actions in addition to generating timely alerts. A Failure Detection and Exclusion algorithm, often known as FD/FDE, is to be implemented in an aerospace GNSS receiver. The effectiveness of the FD/FDE algorithm has to be tested extensively in off-line condition for availability of satellite failure detection and exclusion. Further, the algorithm has to be tested in on-line conditions as well as on a target environment. There has to be a match among the off-line,
on-line, and on-target test results for using the algorithm in
the GNSS receiver.
The integrity tests on an aerospace GNSS receiver are carried out as per the guidelines in DO-229D. This requires simulation of the GPS orbit and determination of satellite visibility at more than two thousands grid points on the Earth surface and for 12 hours at 5-minute time intervals. The FD/FDE algorithm is validated at each space-time point to determine the availability of failure detection and exclusion.
For the non-precision approach, the space-time points are arranged in terms of the HPL values and Horizontal Exclusion Limit (HEL) values and the most difficult to detect/exclude satellite is identified. Extensive Monte Carlo simulations are carried out at the selected space-time points to validate the false alert and missed alert requirements of DO-229D standard. Similar tests are carried out on the GNSS receiver for the precision approach, wherein the VPL values are considered instead of HPL values. Further, the test results of the off-line tests are validated through comprehensive on-line and on-target tests on the selected space-time points.
Certification Aspects
To ensure that the software and the firmware of the aerospace GNSS receiver are robust, providing adequate levels of safety and reliability, the receiver software and firmware need to be developed conforming to the software and hardware design assurance standards — DO-178B and DO-254 respectively. Based on the criticality of the end application, the design assurance should meet DO-178B and DO-254 objectives of Level A, B, or C criticality.
An aerospace GNSS receiver needs to be certified by the FAA (or other competent authorities in other countries) for airworthiness. The FAA gets involved in the certification process right from the planning stage and oversees the compliance of the entire development process as per DO-178B and DO-254 standards. The aerospace GNSS receiver software and firmware undergo extensive verification and validation processes. Further, the GNSS receiver is subjected to all the functional and environmental tests as per DO-229D and DO-160 standards respectively under FAA supervision. Only after the successful completion of all the software, hardware, and systems tests, the receiver is certified by the FAA for airworthiness through Technical Standard Order TSO-C145 Authorization (TSOA).
Conclusion
Aerospace GNSS receivers, by virtue of their inherent safety, reliability, and integrity, are far more suitable for critical applications, where an error could have hazardous or catastrophic consequences. These receivers must be used in commercial transport aircraft, business jets, general aviation aircraft, gliders, experimental aircraft, balloon, and so on. Further, in airport surface vehicles and mass-transport vehicles such as high-speed trains, trams, and unmanned autonomous vehicles of all sorts, whether ground or air, receivers similar to aerospace GNSS receivers should be used for navigation and surveillance purposes.
Jaynata Ray received his Ph.D. from the University of Calgary. He has worked in the GPS field since 1992, and is group manager at Accord Software and Systems in Bangalore, India. He is a member of GPS World’s Editorial Advisory Board.