New feature eliminates the need for a self-hosted NTRIP caster and delivers enterprise-grade correction data to up to three devices simultaneously at no additional cost to the operator
Onocoy, a decentralized GNSS reference station network, is launching Loop Back, a new platform feature that routes quality-assured RTK correction data back to each station operator’s own devices free of charge. More than 7,800 active reference stations contribute to the onocoy network.
Operators who also needed precision positioning for their own drones, survey rovers, precision agriculture equipment, or autonomous machinery face a common friction point: the reference station they owned and operated produces valuable correction data, but routing that data back to their own field equipment requires either a separately maintained NTRIP caster or an additional subscription. Loop Back eliminates both.
Loop Back is immediately available to all onocoy station operators as a standard platform feature. Full documentation and setup guides are available at docs.onocoy.com.
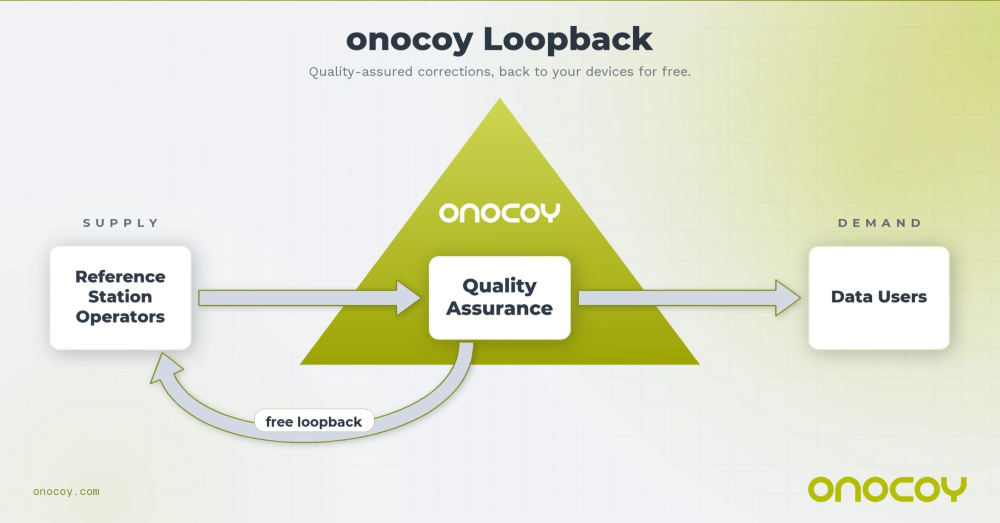
How Loop Back works
When a GNSS reference station is connected to onocoy, raw observation data flows from the operator’s hardware into onocoy’s quality validation pipeline. The platform continuously checks position stability, multi-constellation health (GPS, GLONASS, Galileo, BeiDou), uptime and other parameters before producing a quality-assured RTCM 3 correction stream.
That validated stream has two destinations simultaneously: enterprise data clients who purchase GNSS reference station data through onocoy’s pay-per-use model, and the station operator’s own devices via Loop Back. The operator receives the same production-grade correction stream used by commercial clients, free of charge and with no data credits consumed.
Key capabilities at launch:
Up to three simultaneous active connections from an operator’s own devices to their own station’s corrections, with unlimited devices configurable
Compatible with any NTRIP-capable station regardless of hardware brand or model
Quality monitoring identical to that applied to enterprise client streams
No separate NTRIP caster required; onocoy manages the infrastructure
Free of charge: No data credits consumed for the operator’s own station data.
Who benefits
Loop Back is designed for the growing segment of professionals who both operate a reference station and rely on precision positioning in their daily work. Target use cases include:
Precision agriculture: Farmers running auto-steered machinery, UAV-based crop monitoring, and variable-rate application systems
Geomatics and surveying: Professionals running a base station and multiple rover units across a site, eliminating the overhead of a local base-rover setup
Autonomous systems, robotics and drones: Operators deploying multiple vehicles or aircraft requiring cm-accurate positioning for mapping, inspection, or delivery workflows
Research: Academic and scientific teams running parallel measurement campaigns from a shared base station.
Economics of station operation
Most professionals who deploy a GNSS reference station do so because their business in precision agriculture, surveying, drone operations and construction demands one. By connecting that station to onocoy, operators put the same hardware to work a second time: contributing data to onocoy’s global network and earning rewards worth several hundreds of U.S. dollars per year.
That additional income is enough to amortize the station in under two years before accounting for potential savings on subscriptions. Because onocoy applies continuous quality monitoring to every stream, operators also safeguard the positioning accuracy their business depends on.
Researchers at the University of Tehran have developed indigenous software for providing real-time corrections for networks, precise positioning service and online processing of GNSS observations.
According to variousnews reports, the software is a modern, secure, and intelligent platform for processing observations from global positioning satellites, including GPS, Galileo, BeiDou and GLONASS.
Developed as a practical tool for surveyors, engineers, researchers and organizations in the field of satellite data monitoring, the software is intended to replace imported software and reduce dependence on foreign technologies. It has been tested by the network of permanent stations of the National Iranian South Oil Company.
The system processes observations using static, PPK, PPP and SPP methods, as well as observation quality control and enables the implementation of various positioning methods and real-time monitoring of ionospheric and tropospheric effects.
It supports all GNSS data types and can connect to reference stations in both client and server modes. It supports all existing and future GNSS signals and can handle at least 50 permanent stations and 200 users simultaneously. It also provides phase ambiguity resolution for baselines up to 70 kilometers.
Other technical features include providing a relative planimetric accuracy of 2 cm and a height accuracy of 3 cm using the static method with a maximum setup time of 15 minutes, a relative planimetric accuracy of 4 cm and a height accuracy of 5 cm using PPK and NRTK methods, and delivering corrections with a maximum permissible latency of 0.5 seconds.
The software has the capability to connect to reference stations through serial, TCP, and UDP ports, supports NTRIP protocol versions 1 and 2, displays an online map with a Google Map-like background, allows for viewing the location, status and information of CORS stations and active users, and enables generation of KML outputs.
GNSS corrections company Rx Networks is collaborating with Zephr.xyz, whose software-based positioning SDK enables sub-meter accuracy on Android devices without requiring specialized hardware.
Through this collaboration, Zephr.xyz has integrated Rx Networks’ TruePoint correction services, extending high-precision GNSS capability worldwide with the reliability, availability and continuity required for commercial-scale deployment.
Operating on a global scale, Rx Networks is a provider of GNSS positioning services for tier-1 OEMs, telecom operators, and enterprise customers. Its services are engineered to ensure a five-nines (99.999%) service level agreement for availability, supporting mission-critical and safety-critical applications where continuity, resilience and predictable performance are essential.
Unlike free, experimental or regionally constrained solutions, Rx Networks’ infrastructure is designed for global availability and long-term operational reliability, making it suitable for large-scale commercial deployments.
TruePoint is Rx Networks’ comprehensive high-precision positioning portfolio, designed to support a broad spectrum of customer requirements. Rather than a one-size-fits-all product, TruePoint has solutions that span
global, regional and localized GNSS correction services
accuracy tiers from decimeter-level to centimeter-level performance
multiple deployment models and price-performance options.
TruePoint is designed to evolve alongside customer needs, supporting everything from early-stage experimentation to large-scale production deployments. While Zephr.xyz leverages TruePoint | FOCUS, the collaboration is not limited to a single TruePoint variant, preserving flexibility as applications mature.
One of the most persistent sources of GNSS error — ionospheric delay — has been challenging to correct in real time, especially for mass-market devices. While dual-frequency receivers and commercial correction services can mostly mitigate this issue, they remain too costly and impractical for the billions of smartphones and IoT devices that rely on single-frequency GNSS. Even for dual-frequency systems, the commonly used ionosphere-free linear combination amplifies multipath and receiver errors and reduces data redundancy — yielding only two usable combinations from four original measurements.
This landscape may be shifting with the introduction of GloTEC, a real-time global Total Electron Content (TEC) map from NOAA’s Space Weather Prediction Center (SWPC), released in February 2025. GloTEC assimilates both ground- and space-based observations to provide real-time global ionospheric corrections without relying on error-prone linear combinations.
Unlike coarse models such as the broadcast Klobuchar algorithm or forecast-only products such as the predicted IGS Global Ionosphere Maps, GloTEC updates every 10 minutes using real-time measurements. This high refresh rate establishes a new benchmark for open-access ionospheric nowcasting in GNSS applications.
Originally designed to monitor and mitigate space weather impacts on aviation and communications, GloTEC may also deliver a broader benefit: enabling precise, scalable GNSS corrections for low-cost, single-frequency devices, making high-accuracy positioning more accessible and democratic.
Why Nowcasting Matters for GNSS
The GNSS community has long had to choose between accuracy and latency. Predictive models, such as those from NASA CEDIS or CODETEC, can offer reasonable approximations but may fall short when real-time corrections are required, particularly in the context of navigation, asset tracking or autonomous systems.
Post-processed products (such as rapid/final IGS GIMs) provide excellent fidelity but are typically delayed by hours, days, or even weeks. This makes them useful for research or auditing, but not for real-time navigation needs.
Commercial correction services, such as Trimble RTX and Hexagon’s TerraStar, have filled the gap for high-value applications. These systems interpolate ionospheric corrections in real time, but at a significant cost and they typically require specialized GNSS receivers.
GloTEC bridges this gap by delivering a publicly accessible, high-refresh ionospheric product that can support near real-time corrections. Updated every 10 minutes with a 2.5° latitude and 5° longitude spatial resolution, GloTEC represents a major step forward for public sector GNSS capability, particularly in contexts where accuracy, reliability and scale are all crucial. The data has also been supporting the United States Space Force and is accessible through their Unified Data Library (UDL).
Technical Approach: Adapting GloTEC for Practical Use
While the potential of GloTEC is exciting, turning it into usable corrections for consumer-grade devices isn’t straightforward. TEC maps represent volumetric electron density, while most mass-market GNSS chipsets, especially in smartphones, expect simplified models, such as the eight-parameter Klobuchar model broadcast by GPS satellites. GloTEC is a three-dimensional data assimilation system that uses a Gauss-Markov Kalman Filter to estimate electron density in the ionosphere. It ingests slant TEC measurements from ground-based GNSS receivers and space-based radio occultation data, using the IRI-2016 model as its background state.
To bridge this mismatch, Zephr’s team has been exploring regional fitting techniques, whereby a local subset of GloTEC data is used to generate custom Klobuchar coefficients. These can be transmitted to devices via standardized protocols, such as the LTE Positioning Protocol (LPP), enabling improved ionospheric delay estimation with minimal changes to device-side computation. Even with a regionalized Klobuchar fit and LPP encoding, there is still the problem of accessing the GNSS chip to apply the corrections. To solve this problem, Zephr has created a virtualized positioning engine that takes the raw GNSS measurements from the chip and provides a purely software-based solver. This approach allows the team to implement a variety of more advanced positioning techniques using commodity hardware such as smartphones.
Field Testing: A Quantitative Step Forward
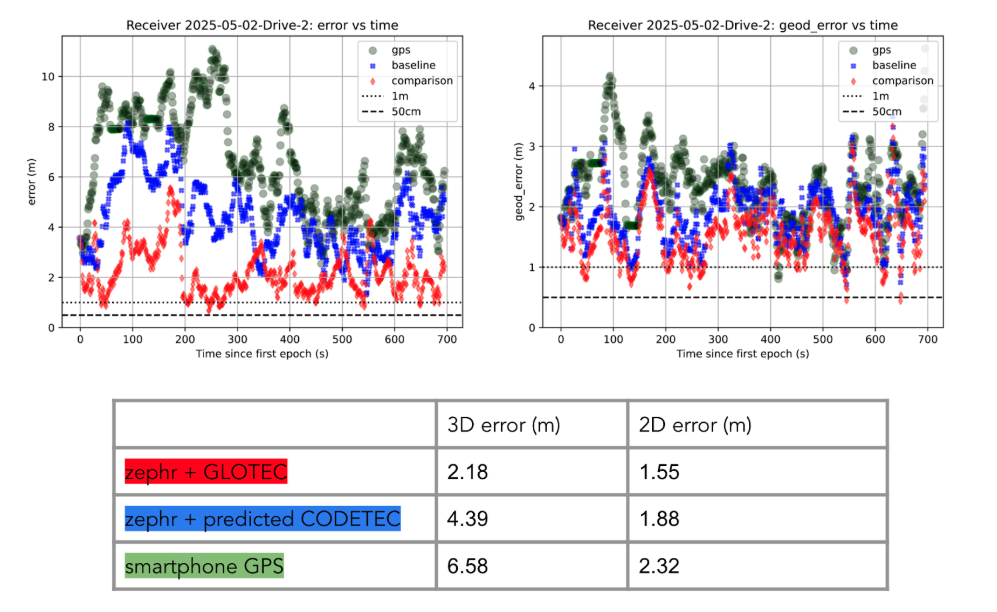
To evaluate the efficacy of GloTEC in improving GNSS accuracy, engineers at Zephr used the virtualized positioning engine to conduct 51 real-world campaigns across various conditions – including urban, suburban, static, walking, and driving – using a Pixel 8 smartphone and an RTK unit for ground truth.
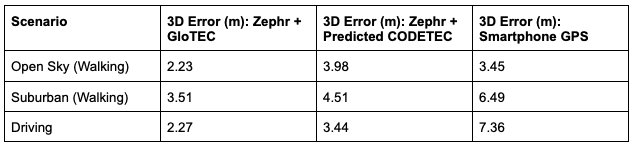
The results were promising, as shown in Figure 1:
Figure 1: GloTEC vs. CODETEC vs. Android Native across multiple scenarios. (All figures provided by author)
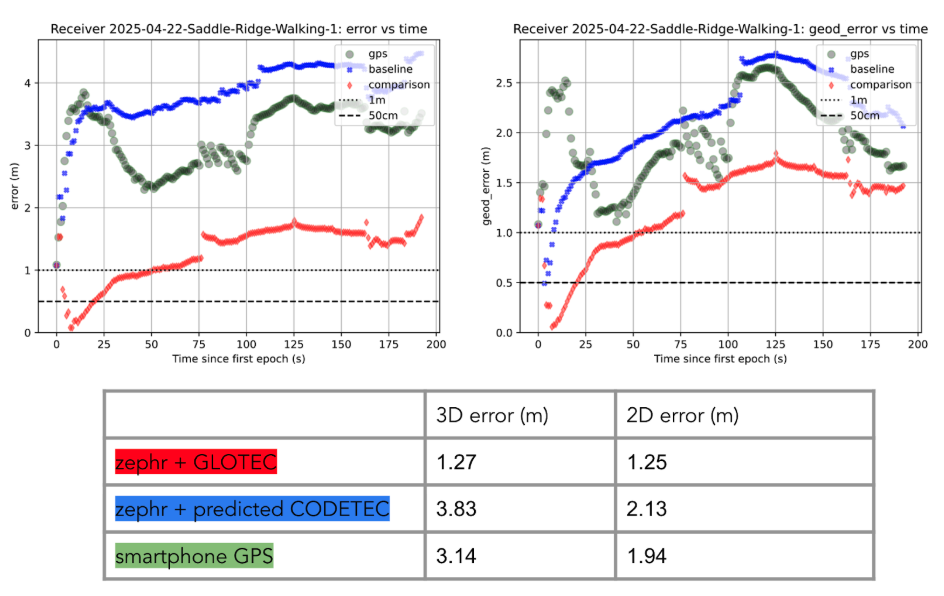
We can break down these results using detailed graphs for each scenario as examples. This will provide a more in-depth look at the positioning for specific traces through the outlined scenarios in Figure 2, Figure 3 and Figure 4:
Figure 2: GloTEC vs. CODETEC vs. Android Native for an open sky walking scenario
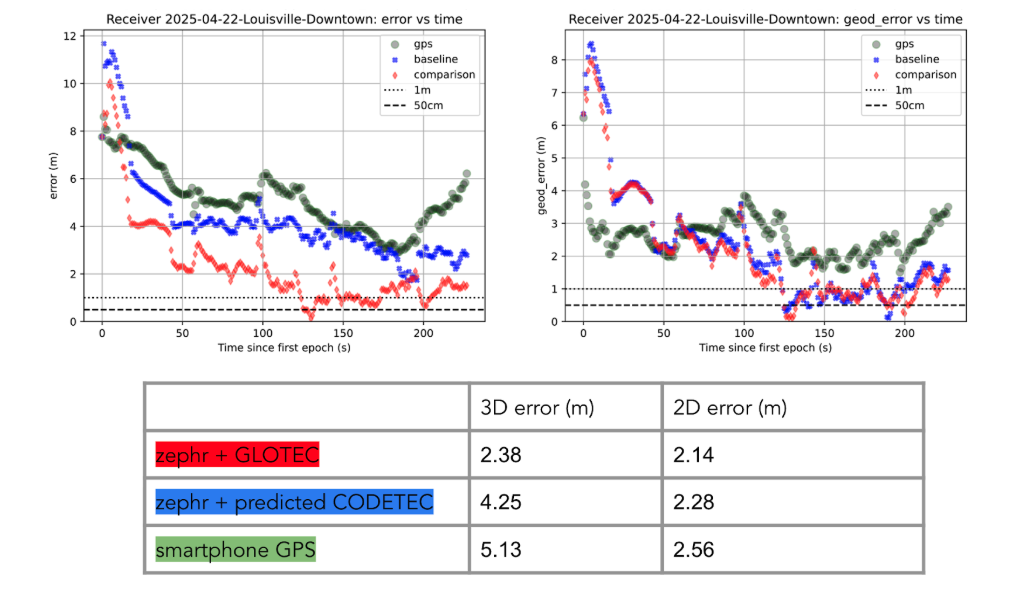
Figure 3: GloTEC vs. CODETEC vs. Android Native for a suburban downtown walking scenario.Figure 4: GloTEC vs. CODETEC vs. Android Native for a mixed sky driving test.
Across all categories, the GloTEC-based regional fitting approach significantly outperformed both the default GNSS solution (which uses broadcast data plus a Klobuchar mode) and the competing IGS products. Accuracy improved by up to 69% in driving scenarios and 46% in walking scenarios, compared to standard smartphone GPS.
While the Pixel 8 used in testing supports dual-frequency GNSS, smartphones face several practical limitations that hinder effective use of ionosphere-free dual-frequency combinations. These include limited signal availability (due to antenna constraints, L1/L5 support gaps, and partial constellation coverage), elevated multipath and noise (especially from omnidirectional antennas in dynamic conditions), and unstable clock biases that complicate error modeling. In fact, iono-free combinations can amplify multipath effects, potentially degrading accuracy in some conditions.
Despite these constraints, the results show that meaningful improvements in positioning are possible using a software-based approach with publicly available corrections. GloTEC, when paired with cooperative or cloud-based GNSS engines, offers a substantial step forward without requiring expensive commercial correction services or specialized hardware.
Broader Implications and Next Steps
While these results are promising, several challenges remain before GloTEC-based corrections can be broadly deployed:
Connectivity Requirements: Real-time access to GloTEC requires periodic downloads over cellular or Wi-Fi connections, raising questions about reliability in low-bandwidth or disconnected environments.
Global Calibration: The accuracy of regional fitting depends on local coverage density and VTEC variability. Further tuning may be needed in equatorial or polar regions, where ionospheric behavior is more volatile.
Nevertheless, the availability of GloTEC marks a significant milestone. For the first time, a free, real-time, high-resolution ionospheric correction product is accessible to developers, researchers, and engineers seeking to improve GNSS accuracy at scale. NOAA SWPC has plans to integrate more low-latency space-based and ground-based data into GloTEC in the near future. The new version of the model outputs will be released to the public once the results are validated. As techniques for applying it to mobile and IoT devices mature, the GNSS community may see a broad shift toward more precise, resilient, and cost-effective positioning systems.
GloTEC may have been designed to help forecasters monitor the response of the ionosphere due to space weather events, but its potential to provide an advanced tool for positioning on Earth is just beginning to be understood. In a world where nearly every mobile application depends on location, and where the cost of poor accuracy is rising (from package delivery failures to navigation errors), this kind of public infrastructure is invaluable.
Researchers and industry developers alike should explore how this NOAA capability can be integrated into their positioning systems. If properly supported, GloTEC could become one of the most impactful GNSS innovations of the decade.
Septentrio, part of Hexagon, has added the onocoy GNSS correction service to its Agnostic Corrections Partner Program. The program is designed to give users the ability to select from multiple high-accuracy correction services, supporting a range of application needs and geographic requirements.
The onocoy service operates as a decentralized, crowdfunded RTK network, providing reliable and cost-effective high-accuracy positioning. This approach is intended to benefit sectors such as agriculture, mining, drone operations, robotics, autonomous vehicles, geodesy and more.
Onocoy operates a community-driven GNSS RTK network powered by Web3 and blockchain technology, to offer secure, transparent and efficient data sharing and transactions, according to the company. Although privately operated, this network actively monitors its base stations to maintain service reliability and quality. Onocoy is joining Septentrio’s Agnostic Corrections Partner Program, which already includes several leading correction services such as GEODNET‘s RTK Service and Swift Navigation’s Skylark Precise Positioning Service.
Hitachi Zosen manages a network of 1,300 reference stations operated by the Geospatial Information Authority of Japan. Nippon GPS Data Service, a subsidiary of Hitachi Zosen, will provide Hexagon with GNSS data from this network.
With access to this data, Hexagon will provide the TerraStar-X Enterprise GNSS correction service, which is suitable for automotive applications. The service is now available for testing in the Tokyo area and will be expanded across Japan.
Hexagon has operational testbeds for TerraStar-X Enterprise in several locations in North America, Europe and China that provide reliable, lane-level accuracy in under a minute. With the addition of a testbed in Japan, vehicle manufacturers and technology providers can use the same design for all their correction service requirements.
By utilizing data created from GSI network observations, Hexagon’s TerraStar-X Enterprise will ensure fast convergence to lane-level accuracy and is available to support large-scale programs with functional safety requirements in Japan.
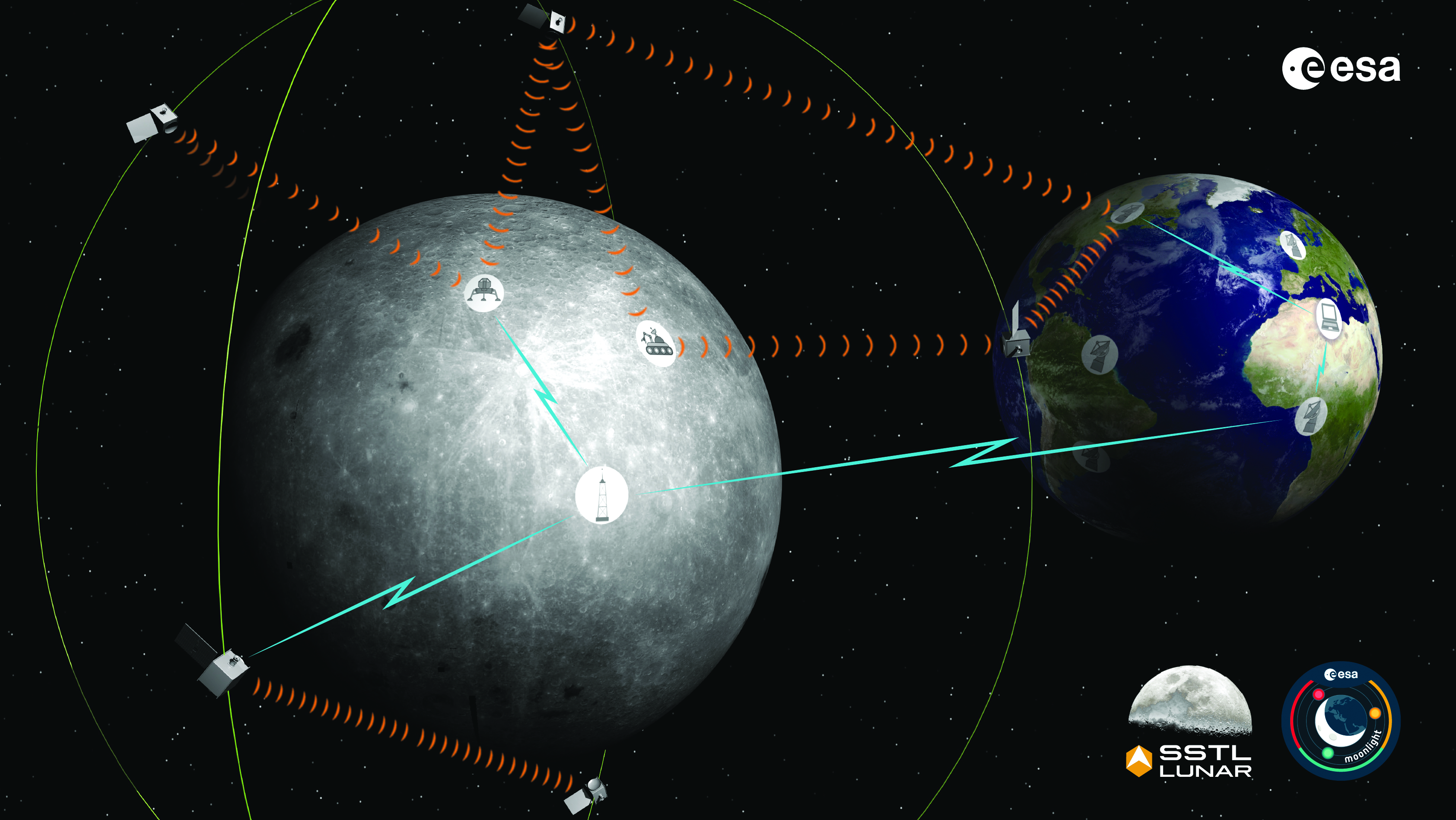
The Moonlight initiative will provide sustainable lunar data-relay services for communication and navigation around the Moon. (ESA Moonlight Study conceptual drawing.) (Image: SSTL/Airbus/ESA)
GNSS researchers presented hundreds of papers at the 2022 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 19–23 in Denver, Colorado, and virtually. The following five papers focused on lunar and space applications. The papers are available now.
MTO Navigation Using Lunar Signals
The moon transfer orbit (MTO) is becoming increasingly important as several national space agencies are planning moon exploration soon, with projects such as NASA’s Artemis. In previous research, the GPS navigation accuracy on the MTO reached 200 m at the moon altitude by using GPS signals emitted from the far side of Earth. As accuracy on a low-Earth orbit (LEO) using GPS is a few meters, 200 m accuracy is not accurate enough to support lunar exploration. The deterioration of accuracy is due to the poor geometry of the GPS satellites that became visible from the MTO.
The authors want to achieve an accuracy of less than 100 m in MTO by using other navigation sources, including the lunar navigation satellite system (LNSS) to be deployed in the moon’s orbit. The LNSS signals will come from the far side of the moon, similar to the signals of GPS satellites coming from the opposite side of Earth. Its satellites will be pointed towards the moon to provide positioning, navigation and timing services on the moon surface, especially at the lunar South Pole region
The researchers have been conducting the simulation evaluation for the MTO navigation accuracy using signals coming from the moon and assume that these signals will be emitted from beacons on the moon surface or the LNSS.
Murata, Masaya; Kogure, Satoshi; “Moon Transfer Orbit Navigation Using Signals Coming from the Moon.”
Designing the Smallsat-Based LNCSS
There is growing interest in the use of a smallsat platform for the future lunar navigation and communication satellite system (LNCSS); however, many design considerations are not finalized for the smallsat-based LNCSS, such as choice of the satellite clock, satellite orbital parameters and the constellation size.
Using the Systems Tool Kit simulation software, the authors examined various LNCSS constellation case studies based in elliptical lunar frozen orbit and with a low-grade chip-scale atomic clock.
They evaluated case studies of navigation design considerations including position and timing accuracy, lunar user equivalent ranging error, and dilution of precision. As for case studies of communications design considerations, the authors examined daily data volume, availability and data rate. Finally, they examined smallsat factors including the cost, size, weight and power of the satellite payload.
The paper includes trade-off analysis in satisfying the preliminary design criteria outlined by international space agencies and commercial space companies.
Bhamidipati, Sriramya; Mina, Tara; Sanchez, Alana; Gao, Grace; “A Lunar Navigation and Communication Satellite System with Earth-GPS Time Transfer: Design and Performance Considerations.”
Developing an SDR for Space
A geostationary satellite (GEO) equipped with the satellite-based augmentation system (SBAS) function has a transmitter for GNSS correction signals at the L1 and L5 bands. This transmitter could interfere with the GNSS space service volume (SSV) receiver in the same satellite, so L1 and L5 signals cannot be used for the GEO SBAS satellite. However, the use of GPS L2C signals can be an alternative.
The authors of this paper present the development of a GPS L2C signal generator for the SSV in GEO simulation. They present the simulation process for GEO satellites and the structure of the GPS L2C signal generator.
In this study, a verification through the receiver test with a GNSS software-defined receiver is included to show the possibility of the designed signal simulator. The validation is performed by analyzing the programmable system device, the results of the acquisition, code/carrier tracking, and the C/N0 estimation.
Lee, Hak-beom; Choi, ByeongHyun; Song, Young-Jin; Won, Jong-Hoon; Kwon, Ki-Ho; “Development of GPS L2C Signal Generator for SSV in Geostationary Orbit Simulation.”
Differential Positioning on the Moon
This paper introduces a new concept of delivering the pseudorange correction calculated at a reference station on the lunar surface, as a part of the lunar navigation satellite system (LNSS) navigation message. The concept enables LNSS users to apply differential positioning using pseudorange correction without adding new hardware to their receivers.
The authors propose the differential positioning technique to reduce the signal-in-space range error of LNSS satellites and the coordinate transformation errors from Earth-centered fixed frame to lunar reference frame — the dominant errors in satellite positioning by LNSS.
The proposed reference station is equipped with instruments to externally estimate its own position relative to the lunar reference frame. The user on the lunar surface would then perform differential positioning using the station coordinate and pseudorange correction obtained at the reference station.
In this study, the simulation results using eight elliptical lunar frozen orbit satellites show that the real-mean-squared values for both horizontal and vertical positioning errors with differential correction are reduced to 1/10 of those without differential correction, even at 10 degrees latitude from the reference station at the lunar South Pole.
Akiyama, Kyohei; Murata, Masaya; Kogure, Satoshi; “Differential Positioning Performance on Lunar South Pole Region Using Lunar Navigation Satellite System.”
GEO Precise Orbit Determination
Using GPS in satellites in geostationary (GEO) orbits provides advantages by improving position, velocity and timing data, reducing operating costs and providing autonomous orbit control for station keeping. This paper presents the result of the onboard data evaluation and precise orbit determination of an optical data-relay satellite (ODRS) using GPS L1 C/A code and carrier-phase observations for 74 days.
As a result of precise orbit determination, the authors found that both code- and carrier-phase observations are affected by the ionospheric delay when signals pass through the plasmasphere located above the ionosphere.
Several methods were implemented during this research to reduce the effect of the plasmasphere, including setting a higher cut-off altitude, applying correction sequences generated from orbit determination residuals, and applying a new observation noise model depending on the GPS off-nadir angle. Results show that the correction sequences and the new noise model improve the internal orbit consistency. The authors also found that the orbit bias in radial direction due to negatively biased carrier-phase observations is mitigated from –51 cm to –17 cm by setting a higher cut-off altitude and applying correction sequences.
Matsumoto, Takehiro; Sakamoto, Takushi; Yoshikawa, Kazuhiro; Kasho, Sachiyo; Nakajima, Ayano; Nakamura, Shinichi; “GEO Precise Orbit Determination Using Onboard GPS Carrier Phase Observations of Optical Data Relay Satellite.”
Rx Networks, Inc., a GNSS data services company, announced the availability of TruePoint.io precise location services on Qualcomm’s Snapdragon 8 Gen 1 and Snapdragon 888 5G Mobile Platforms. TruePoint.io integration empowers Android smartphones to achieve enhanced location accuracy down to a meter or less – something previously only seen with high-grade receivers.
With enhanced location accuracy, superior user experience for such use cases as rideshare, micro-mobility, health and fitness and lane-level requirement applications can now be realized. The enablement of reliable meter-level location accuracy on mobile phones will unlock the potential of location-based services and open the door for other innovative and unique use cases. The limitations of a standalone GNSS chipset no longer become the barrier to pursuing the vision of connected ecosystems reliant on location.
TruePoint.io enables scalable, reliable, and affordable ways to leverage high-precision location on smartphones powered by Snapdragon mobile platforms. Rx Networks’ global coverage, including China, gives smartphone OEMs the advantage of a single GNSS corrections vendor that works across all continents.
“Rx Networks provision of GNSS data services for accurately positioning smartphones using Snapdragon mobile platforms will enable meter-level location accuracy almost everywhere smartphones can connect to a terrestrial cellular network,” said Francesco Grilli, Vice President, Product Management at Qualcomm Technologies, Inc. “Meter-level location accuracy is poised to improve smartphone user experiences and spur the creation of exciting and innovative services for businesses and consumers.”
TruePoint.io is scheduled to be available on Snapdragon mobile platforms initially in China in Q4 2022 and globally in H1 2023.
Trimble has released the Trimble TerraFlex Premium edition, a new tier of Trimble’s flagship geographic information system (GIS) data-collection software. The edition provides customers with offline GNSS corrections.
The new automated service works exclusively with Trimble GNSS receivers — including the Trimble DA2 receiver for the Trimble Catalyst positioning service — to provide high-accuracy GIS data capture in a wider range of locations and difficult GNSS environments than was previously possible.
TerraFlex users can increase the quality and speed of their data collection using offline GNSS corrections in situations where real-time services are intermittent or unavailable. Using the new service, all data from the field is automatically processed in the cloud without user intervention.
The most accurate real-time or offline processed position is stored for each feature, unlocking a high-productivity enhancement for all TerraFlex Premium subscribers.
Combining data-collection software and offline GNSS corrections into a single TerraFlex subscription simplifies both the workflow and the purchasing process for GIS organizations, from state and local governments to enterprise customers, including federal governments and utilities companies. This workflow to collect, process and deliver the most accurate and reliable positioning information reduces complicated manual processing steps and helps preserve data integrity.
Photo: Trimble
Streamlined post-processing using TerraFlex offline GNSS corrections is also available to Esri ArcGIS users, with the new Trimble Terra Office add-in for the Esri ArcMap GIS application. The new add-in replaces both the Trimble Positions Desktop and Trimble TerraFlex Desktop add-ins and supports offline GNSS corrections as well as existing desktop post-processing workflows. Terra Office is available as a yearly subscription.
“With Trimble offline GNSS corrections, we’ve taken the manual steps out of post-processing and made it as effortless as possible,” said Gareth Gibson, marketing director, Trimble Mapping and GIS. “This workflow enables TerraFlex customers to expand the locations and environments in which they work while still achieving high-accuracy results, and all without needing to become a GNSS expert.”
The TerraFlex Premium edition subscription is available through Trimble Geospatial Distribution Partners.
The TerraFlex offline GNSS corrections service uses a network of community base stations, and is broadly available in North America, the United Kingdom, Europe, Australia and New Zealand.
The Trimble Terra Office add-in for Esri ArcMap software is available through Trimble Geospatial Distribution Partners.
A SolarCleano F1A robot tackles a tough cleaning challenge on a solar farm in Saudi Arabia. (Photo: SolarCleano)
SolarCleano, based in Garnich, Luxembourg, makes robots that clean large solar panel installations using GNSS receivers and corrections from Swift Navigation. We asked Christophe Timmermans, SolarCleano’s managing director, a few questions about its technology.
How often do solar panels need to be cleaned?
For decades, it was believed that solar panels did not need to be cleaned due to their angle to the ground and rain. Nowadays, however, the cleaning of solar panels is widely accepted as necessary to optimize a plant’s return on investment (ROI).
How much time per sq. meter do your machines take to clean solar panels?
To provide the fastest possible ROI to our customers, we developed a range of robots to best address the needs of various solar plant layouts. A large utility-scale project with high level of soiling losses in a desert environment will need a very fast and reactive cleaning solution such as our SolarBridge B1, which can clean 24/7/365 fully autonomously. The most suitable solution for a farm rooftop in Germany that needs to be cleaned three to four times a year might be our F1 model, which can clean the equivalent of up to two soccer fields a day. It is designed for rooftops, floating panels and mid-size plants up to 50 MW. While the speed of cleaning is a very important variable, the quality of cleaning is often considered as the driver to performance, which is why we propose different types of brushes depending on the soiling types. Plus, the robot speed can be modified according to the soiling level.
Why do robots need GNSS receivers to clean solar panels?
Moving on inclined, wet glass surfaces makes odometry unreliable because robots might occasionally slip. Therefore, GNSS is the most reliable way to continuously monitor their exact position. Our robots also need path planning because they cannot operate randomly like lawn mowers. Safety is obviously a major concern; we need a very high localization accuracy to ensure that robots don’t fall off the panels. Finally, the largest solar plants are developed in dry, remote locations with high irradiation such as the Sahara, Atacama and Australian deserts. GNSS allows us to have very accurate localization even in those remote areas. In addition, this solution can easily be installed on already-existing solar plants with little capital expenditure.
What spatial accuracy requirements do the robots have for this task?
Safety is our absolute priority. Therefore, our robots need an accuracy of less than 3 cm. They also need to be aware, in real time, of changes in their surroundings, such as maintenance teams, animals and uneven ground.
On large solar farms, GNSS receivers always have a clear line of sight to the satellites and do not suffer from multipath. So, what are the key technical challenges?
Our robots have the additional advantage that they do not need to drive very fast. However, we need to manage fleets of robots on the other side of the world in regions difficult to access and with harsh weather conditions, such as very high or low temperatures and the accumulation of dust behind panels due to air vortices. We need to be able to perform remote maintenance and solve any issue from our control center in Luxembourg. These challenges make our robots increasingly robust. With a current fleet of more than 300 robots around the world, we collect lessons every day to ensure a greater reliability for our upcoming generations of robots.
Why did you choose to partner with Swift Navigation?
We share a vision with Swift: “Accessible automated solutions serving sustainable goals.” We also share other important values, such as “iterate quickly” and “focus on what matters.”
TerraStar X corrections technology enables lane-level accuracy with under one-minute convergence for consumer and automotive-grade GNSS receivers
Hexagon’s Autonomy & Positioning division has partnered with Chinese positioning company Dayou to bring TerraStar X technology to the Chinese market. TerraStar X provides fast precise point positioning (PPP) corrections for autonomous vehicles and has mass-market use such as in smartphones.
The partnership enables Hexagon and Dayou to provide consistent positioning solutions globally, including North America, Europe and China, so original equipment manufacturers (OEMs) can deploy the same design worldwide.
The GNSS corrections generated from TerraStar X technology enable lane-level accuracy with convergence in under a minute for consumer and automotive-grade GNSS receivers, supporting advanced driver-assistance systems (ADAS), autonomous applications, safety-critical applications, mobile-phone applications and more.
TerraStar X technology delivers corrections using industry-standard formats compatible with mobile networks and enabling efficient delivery of corrections to millions of end-user devices. Through the partnership with Dayou, OEMs can now deploy the same high-accuracy solution across China as in North America and Europe, while having access to local sales, support and technical resources.
“This partnership provides a way for global companies to leverage TerraStar X technology to bring consistent lane-level positioning around the globe,” said Sara Masterson, director of positioning services at Hexagon’s Autonomy & Positioning division. “With its hardware-agnostic design, industry-standard format and delivery of corrections, this technology opens up the possibility of precise positioning for a multitude of new mass-market applications for customers to use one software positioning solution on all platforms worldwide.”
“Dayou is excited to be working with Hexagon in China to bring this next level of positioning technology to market,” said Han Jianxin, chief executive officer at Dayou. “High accuracy positioning used to be limited to expensive equipment and niche markets like survey and mapping. With TerraStar X technology, everyone can have the benefit of more accurate positioning, opening up new applications ranging from autonomous driving and freight to regular smartphone users moving from point A to B.”
Test Regions Expand to China
Using Dayou’s local infrastructure to calculate ionosphere corrections, TerraStar X technology ensures that fast convergence to lane-level and sub-meter accuracy is available when needed.
Engineering development test areas are available around the world to support large-scale programs with functional safety requirements. With these test regions now expanded to China, the partnership with Dayou marks a significant milestone to bring Hexagon’s TerraStar X technology to a global scale.
China Dayou PI is a Chinese company invested in by China Intelligent and Connected Vehicles (Beijing) Research Institute Co. Ltd. for high-precision positioning service and solutions based on GNSS, INS and HD map technology.
Fugro’s SpaceStar GNSS precise point positioning (PPP) service provides high-accuracy positioning in space
Artist’s rendering of Loft Orbital’s YAM-2 small satellite in orbit. The small sat will demo Fugro’s PPP service. (Image: Loft Orbital)
Loft Orbital on June 30 launched its YAM-2 satellite, the first satellite equipped with Fugro’s SpaceStar next-generation positioning technology from Cape Canaveral in Florida onboard a SpaceX Falcon 9 rocket. Now in orbit, the satellite will provide an on-orbit demonstration of the new service.
From its 525-km Sun-synchronous orbit, SpaceStar is using PPP to deliver high-accuracy sub-decimeter onboard positioning in real time during YAM-2’s low Earth orbit (LEO) operations. Fugro’s proprietary positioning software is integrated into YAM-2 and receives precise GNSS real-time orbit and clock corrections from geostationary satellites. Highly accurate positioning in LEO is becoming increasingly important for Earth observation applications, safe constellations management, and space debris collision avoidance.
“We’re especially excited to demonstrate this new functionality,” said Loft Orbital CTO, Pieter van Duijn. “Fugro’s SpaceStar service is something that can really help not only Loft Orbital’s missions, but also be of interest to the wider application of space situational awareness and safety.”
“We are extremely proud to be providing our real-time PPP service to the YAM-2 small satellite,” said Daan Scheer, Fugro’s satellite positioning commercial manager. “We’ve been able to bring this innovative product to market thanks to our close cooperation with Loft Orbital, and we’re looking forward to completing a successful in-orbit demonstration mission. The accuracy of our SpaceStar position service is not only contributing to our purpose of a safe and liveable world but, by facilitating safer navigation in space, even beyond.”