The In-Location Alliance was launched August 23 by 22 companies across location industries to drive innovation and market adoption of high-accuracy indoor positioning and related services.
Accurate indoor positioning opens up plenty of possibilities for new mobile services. For a consumer this could mean, for example, receiving directions to the right products and personalized product promotions in nearby shops; using real-time navigation inside a building; finding the precise location of assets and people; and even increasing security in emergency situations. For facility owners and local service providers this could enable, for example, increased local customer identification; enhanced product placement; and better customer satisfaction by deploying resources when and where needed.
The alliance will focus on creating solutions offering high accuracy, low power consumption, mobility, implementability, and usability. It will create an ecosystem that stimulates innovation, enhances service delivery, and accelerates the adoption of solutions and technologies that optimize the mobile experience, the companies said.
Founding members include: Broadcom, CSR, Dialog Semiconductor, Eptisa, Geomobile, Genasys, Indra, Insiteo, Nokia, Nomadic Solutions, Nordic Semiconductor, Nordic Technology Group, NowOn, Primax Electronics, Qualcomm, RapidBlue Solutions, Samsung Electronics, Seolane Innovation, Sony Mobile Communications, TamperSeal AB, Team Action Zone and Visioglobe.
Alliance members will pilot the most promising services and use cases from a business and solution point of view. The other important task for the Alliance is to ensure a multivendor environment by promoting open interfaces and a standard-based approach.
Alliance members are encouraged to execute their own pilots and present their data to the Alliance. The primary solutions will be based on enhanced Bluetooth 4.0 low-energy technology and Wi-Fi standards using relevant existing or coming features of those technologies. These technologies are commonly used in mobile handsets and are thus a natural starting point for the Alliance’s efforts.
Pre-commercial pilots and business model verifications will start in 2012, while 2013 is expected to bring mobile handset-based implementation enabling the first consumer applications in the indoor mobile environment.
The Alliance says: “The aim of the In-Location Alliance is to act as a pioneer opening up new business streams for indoor environments. Indoor positioning is the next frontier of mobile services, offering great opportunities to enhance consumer experiences. For the benefit of enterprises, the Alliance will drive a world-wide indoor positioning system for use in major venues. Our pilots, along with technical evaluations, are paramount for driving rapid market adoption.”
Patrick Connolly from ABI Research says: “The indoor location market sits on the cusp of a wave, with the market set to reach a significant number of installations in 2015-2017. With a huge number of proprietary technologies vying for position, the establishment of the In-Location Alliance can encourage innovation, lower costs and, ultimately, widespread adoption of standard based technologies and solutions.”
Naysayers still exist when talking about the emerging indoor positioning market. They say that the market is still too nascent — and the technology is sub par and not there yet. However, there are just too many atmospherics, and big companies getting involved in indoor positioning development, to brush it off as another technology fad. The recent announcement that 22 companies are combining to come up with standards is a good example. Mainstream media articles touting the new market also are spearheading development and consumer interest. Still, how can you start an industry group and talk standards and markets without the two largest players?
In a move that indicates that there is a strong market, 22 companies recently partnered to create the In-Location Alliance. The new group, which includes Nokia, Qualcomm, Samsung Electronics and Sony Mobile, aims to improve and expand indoor positioning and related services.
Google, which has been the dominant player in location markets, was noticeably absent. Google has partnered with large retail chains and has mapped many indoor malls, airports and other facilities to help drive the market with its Google Maps for Android 6.0.
Another company apparently not part of the alliance is Apple, which recently ended its location data partnership with Google. Apple is launching its iOS 6 operating system update, called Maps for iOS, which features 100 million business listings and Yelp recommendations.
In a prepared statement, the group said it welcomes the addition of any new member “who is ready to further investigate business opportunities in indoor location-based services and sees value and benefits in industry collaboration.”
The In-Location Alliance says it will go after both the consumer and enterprise location markets, even though both have technical and market limitations for indoor positioning. The group said services it will focus on include real-time navigation inside buildings, directions to personalized products and promotions inside retail stores and malls, asset and employee location, customer identification, and security solutions.
Because the technology is widely available on smartphones, the alliance will focus its products on enhanced Bluetooth 4.0 technology and Wi-Fi to develop mobile services as a starting point.
The allied companies say they will conduct pre-commerical pilot programs and business model verifications later this year in order to launch handset-based applications next year.
Other members of the In-Location Alliance include Broadcom, CSR, Dialog Semiconductor, Eptisa, Geomobile, Genasys, Indra, Insiteo, Nomadic Solutions, Nordic Semiconductor, Nordic Technology Group, NowOn, Primax Electronics, RapidBlue Solutions, Seolane Innovation, TamperSeal, Team Action Zone and Visioglobe.
Nokia also has been developing indoor positioning systems that use 3D models, rather than 2D floor plans. Broadcom released a chip that supports indoor positioning through Wi-Fi, Bluetooth and even NFC.
Mainstream publications such as the Wall Street Journal and USA Today have written articles about indoor positioning as a potential burgeoning market. The articles say such big brands as Target, Walgreens and Home Depot are implementing indoor positioning and marketing strategies. Walgreens is partnering with Aisle411, which offers an application with 9,000 store maps.
Mapping Services Now on New Kindle Fire
The next model of Kindle Fire, Amazon’s tablet, will have mapping services installed as part of a deal with Nokia. What is noticeable is that it does not have location technology from Google, which is strange as it is the Android mobile operating system that powers the Kindle Fire. Published sources say Amazon will announce the agreement this month.
As our sister publication Wireless Pulse reported, Competitor Barnes & Noble recently adopted OpenStreetMap, through Berlin-based Skobbler’s ForeverMap 2 app, to allow developers to create Nook applications with location functionality later this year, according to published sources.
While the Nook line of products are Wi-Fi enabled, they lack pure play GPS capability. Although Nook devices don’t have 3G or 4G access of smartphones, it is a step toward developing location capability.
A basic version is free on the Nook, and a premium version costs $4.99. The Nook units with the location capability include the Nook Color and Nook Tablets.
Both the Kindle and Nook have one common thread — their parent companies opted not to go with Google Maps. Is the location giant taking notice?
20 Years of Covering Location Technology
September 2012 marks my 20th year of writing about the business of location technology. In 1992, the big GPS companies (Trimble, Garmin, Ashtech, Sony, Magellan, Rockwell) were trying to develop consumer applications that were evolving from their military technology developed for the recently concluded Gulf War.
Most of the news back then was in the form of government contracts, and some survey agreements, or evolving policy about GPS. It turns out that the consumer side was being developed not by the GPS industry, but intelligent transportation industry providers through the digital mapping companies Etak (now TomTom) and Navigation Technologies (now Nokia).
While the terms “telematics” and location-based services were not being used in 1992, some companies saw the potential for big dollars incorporating positioning technology into mobile phones. I wrote an article in October 1992 headlined “Rockwell Says GPS in Cellular Phones Means Big Business.” I quoted a few industry consultants at that time who said that they had doubts that it would be a big market because of the cost and size of the GPS chipset, antenna issues, and consumer acceptance. The big deal about putting GPS into cell phones was to meet an FCC enhanced 911 requirement, but that happened a few years later.
Such companies as Motorola brought the name “telematics” to North America and attempted to jump-start the market here. At least one industry executive never liked the word telematics, saying it was a “Stalinist” word.
While companies have come and gone, and the technology has evolved to a point that commoditization is pervasive, the promise of location technology and markets will still be strong. Companies and individuals have made fortunes and lost them in the location industry, but one thing for sure — it has never been boring covering and writing about the business and people.
Walgreens, the largest U.S. drugstore chain, announced a partnership with in-store mapping and search startup aisle411. As a result of this partnership shoppers can use their iPhone or Android smartphones to view maps of any of the 7,907 Walgreens stores and locate products down to a particular section of each aisle. Walgreens is said to be the first U.S. national retailer with all of its stores mapped in a mobile application.
Spirent Communications has launched its SimSENSOR MEMS (Micro-Electro-Mechanical Systems) sensor simulation software. SimSENSOR is targeted at the R&D environment and enables performance testing of sensor fusion algorithms in navigation systems that include MEMS inertial sensors and multi-GNSS.
SimSENSOR works in tandem with Spirent’s multi-GNSS constellation simulators by simulating MEMS sensor outputs on a common trajectory with the simulated GNSS signals. Trajectories that include representative human motion gestures, such as arm movements, are included with SimSENSOR. The ability to test fusion algorithms that take inputs from a wide variety of sensors is supported, including accelerometers, gyroscope, magnetometer, digital compass, and barometric height sensors. Representative MEMS noise models and errors such as bias and drift are also included and are available under user control.
“SimSENSOR is designed for customers who want to optimize sensor fusion architectures,” said Rahul Gupta, product manager with Spirent’s Positioning Technology business. “Sensor fusion is increasingly being used to enable a wide range of applications including indoor positioning. SimSENSOR is a unique tool for accelerated, lab-based R&D in support of this ground-breaking work. It will also help to extend Spirent’s leadership in testing hybrid positioning technologies in mobile devices.”
In 2007 Spirent launched SimINERTIAL to test inertial navigation systems involving high-grade GPS/inertial units suitable for military applications. SimSENSOR benefits from the experience gained by Spirent, in particular in relation to ensuring coherency and stability between GNSS and simulated sensor output streams.
Tarun Bhattacharrya, Hassan El-Sallabi, Jian Zhu, Jeff Wu, and Per Enge.
Radio-Frequency Pattern Matching
By Tarun Bhattacharrya, Hassan El-Sallabi, Jian Zhu, Jeff Wu, and Per Enge
Radio-frequency pattern matching (RFPM) is the engine that enables the use of mobile-phone signals to locate wireless devices in any environment, including dense downtown areas and indoors. This exciting technology leverages the power of the database to improve location accuracy to within 50 meters in even the toughest signal environments. Significant advances in RFPM technology have been made over the last 10 years. The system described here is deployed in more than 24 wireless networks to provide the location of E-911 callers and help save lives. For simplicity, we focus on the RFPM using signal strengths even though the technology also works with arrival times, signal-to-noise ratios, differential signal strengths and any signal parameter that varies in a predictable fashion over the coverage area.
Like GPS, RFPM is based on correlation. However, it does not correlate a received spread-spectrum code with a replica code stored in the receiver. Rather, it correlates the signal strength of cell-phone signals measured by the roving phone to a database that contains a map of those signal strengths for the covered area. Consider Figure 1. It shows this key correlation operation. As shown, the database contains a k-vector for each location within the covered area, where the k elements give the estimated strength for the k mobile phone signals that can be received at the given grid point. These k-vectors are typically stored over a 10- or 30-meter grid. This grid of predicted signal strengths is built in advance and is updated only when the topography of the wireless network changes. Thankfully, base stations do not generally move!
Figure 1. Radio-frequency pattern matching of n-vector from mobile user to k-vectors within database.
The mobile phone provides the network measurement report (NMR) in real time. This report does not require any network hardware or on-phone software beyond that required by the 2G, 3G and LTE standards for all mobile phones. Thus, the Polaris Wireless solution is capable of locating any mobile phone over any air interface. The NMR is also shown in Figure 1. It contains an n-vector of received signal strengths, where k ≥ n. A multiplicity of n-vectors are backhauled to the server that contains the database. They are correlated with the k-vectors, and the estimated location of the mobile phone is the location associated with the maximum correlation.
For Example, San Francisco
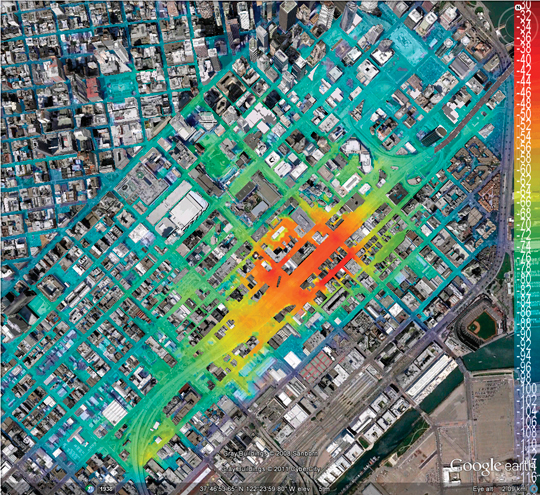
Figures 2, 3, and 4 explode the RFPM database for the financial district of San Francisco. Figure 2 is the top view, and the Bay Bridge is shown heading northwest across the Bay. The numbered black dots are some of the base stations in action for this area. Figure 3 digs down one level. It shows the individual k-vectors contained within the database. As shown, this database is based on a 30-meter grid. Figure 4 is a super-zoom that explodes the individual k-vectors. As shown, each of these vectors contains an element for each base station that can be received at the given location. In Figure 4, each element is color coded to correspond to the strength for the signal from the given base station.
Figure 2. Coverage area of an RFPM database within San Francisco.Figure 3. Zoomed view of San Francisco database showing a multiplicity of k-tuples.Figure 4. Radio-frequency pattern matching of n-vector from mobile user to k-vectors within database.
Building the Database
RFPM accuracy depends strongly on the quality of the database, which needs to be built with great care. In fact, signal propagation depends on the network topology including:
◾ antenna location, heights, patterns, effective radiated power, tilt, and azimuth
◾ cell type, such as micro-cell, macro-cell, indoor or distributed antenna systems.
Signal propagation also depends on information available from geographical information systems such as:
◾ tree canopy
◾ height of buildings and terrain
◾ topography (water, open area, suburban, urban)
◾ roads.
With this data, the signal strength radiating from a base station can be estimated. This is not a simple business. For example, the calculation must identify the points where terrain or buildings interrupts the ray from the transmitter to the receiver. It must also identify the points where these obstacles break the Fresnel zone that surrounds the ray.
Finally, these open-loop predictions are tuned based on a sparse set of measurements. Once tuned, the database is time invariant or nearly so. If minor changes are made to the network topography, the open loop predictions alone are sufficient to accommodate the changes. If network changes are significant, such as the building of many new base stations, then the open-loop predictions must be updated, and a new set of measurements used to tune the predictions.
Figure 5 shows a typical map of signal strengths surrounding one mobile phone in a completely open area. Absent terrain and buildings, the signal strengths vary rather smoothly. Figure 6 is for one of the transmitters in the San Francisco financial district, which is a much more complicated urban environment due to the dense concentration of high-rise buildings and uneven terrain. In this case, the signal-strength signature has a gratifying abundance of detail. This detail enables RFPM to work very well in the complicated signal environments that we find in downtown areas and also indoors. In short, RFPM benefits from the buildings and terrain that hinder satellite measurements.
Figure 5. Predicted signal strength for a transmitter surrounded by open ground.Figure 6. Predicted signal strength for one transmitter in the San Francisco financial district.
Performance and Summary
RFPM works well. It provides high accuracy in a in a wide variety of environments. Polaris Wireless routinely tests the accuracy of its solution in urban settings. Table 1 shows the results of such evaluations, based on measurement sets that are not used to tune the database.
Table 1. Evaluations based on routine accuracy tests of RFPM in urban settings.
These days, robust navigation for downtown and indoors is based on an expanding suite of location technologies. These include: assisted GPS, new satellite constellations (Galileo, GLONASS, Compass, and so on), inertial measurements, Wi-Fi ranging, and signals from low-Earth orbit. RFPM, and its unique reliance on database-derived location, should remain an important part of this mix.
Tarun Bhattacharrya is vice president of research at Polaris Wireless. He earned his Ph.D. in electrical engineering from the Indian Institute of Science.
Hassan El-Sallabi received his D.Sc. in electrical and communications engineering from Helsinki University of Technology, Finland. At Polaris he works on RF propagation modeling.
Jian (JET) Zhu received his Ph.D. in electrical engineering from Georgia Institute of Technology; he is a research engineer at Polaris.
Jeff Wu focuses on algorithm development for propagation modeling at Polaris, and is a Ph.D. candidate in electrical engineering at Stanford.
Per Enge is the Kleiner Perkins professor of engineering at Stanford University, where he directs the Stanford Center for Position, Navigation, and Time. He is also a technical advisor to Polaris Wireless.
A range of solutions are vying to replicate what GPS does outdoors in an indoor environment, from Wi-Fi to Bluetooth to “terrestrial” GPS, plus many others. Which one is likely to be successful? IMS Research (recently acquired by IHS Inc.) said the answer will not simply be just “one.” Locating a smartphone in an outdoors environment is straightforward, with more than 90 percent of smartphones providing GPS functionality. However, GPS becomes less useful in built-up areas and can be useless indoors, reports IMS Research.
Indoor location enables a number of exciting applications that may previously have been considered impossible, for both the consumer and the venue owner, said IMS Research. Not only can it provide analytics, tracking footfall and understanding consumer behavior, but also improve the shopping experience, helping the consumer to find a particular store or product. Whilst these examples are useful, the real benefit and revenue generation is likely to arrive in the shape of advertising.
Bluetooth in Nokia’s HAIP variety can provide accuracies claimed to be less than one meter, making it suitable for “aisle level” positioning. NextNav is beginning to roll out a technology described as “terrestrial GPS” in the United States, using transmitters based on the ground, and the existing GPS chipsets found in many smartphones. Other solutions include the IMES system in Japan and cellular-based solutions from companies such as Path Intelligence.
While the roll out of commercial solutions has only recently begun, Wi-Fi has, to date, been the primary technology used. “Its high penetration in smartphones, combined with an existing infrastructure of access points, in venues such as shopping malls and airports etc., means minimal additional investment is required to support some level of positioning solution,” noted Alex West, Connectivity and Location research director at IMS Research. “For this reason, a range of different companies from Google, to Qualcomm and CSR, to Qubulus, all have solutions incorporating Wi-Fi.” Current location accuracies through Wi-Fi make it suitable for “store-level” positioning but less so for product or aisle-level, although IMS Research forecasts that consumers’ exposure to store-level accuracy will drive demand for aisle/product-level accuracy.
In reality, it is unlikely that one solution will meet all requirements, and among recent announcements is CSR’s SiRFusion platform, which uses not only Wi-Fi, but also cellular and MEMS sensors such as accelerometers and gyroscopes, to provide a hybrid solution. MEMS sensors, which are becoming increasingly common in smartphones, are expected to play a bigger part in positioning, not only improving accuracy levels but also aiding in cutting down power consumption.
Other leading IC suppliers, including Broadcom and Qualcomm, have announced solutions incorporating these technologies, and Bluetooth in some cases, with the necessary software. As such, a more accurate indoor positioning service is expected to be included on smartphones over the next 12 months, and is expected to provide the platform for the many apps and services that are being developed utilizing indoor location, according to IMS Research.
Because LBS Insider’s deadline is this week, CTIA coverage from New Orleans is not included in this month’s column. Janice Partyka, editor of GPS World’s Wireless Pulse, is covering CTIA in the Crescent City for the latest location-based services, M2M, and connected vehicle news. So instead of talking about CTIA (and why there aren’t many pure LBS players or sessions there anymore), this column examines the hype surrounding indoor positioning — is it LBS’ savior, or just another technology that may, or may not, pan out?
The location industry will know very soon whether indoor positioning is just another overhyped technology niche — or the needed capability that will drive the largest advertisers and retailers to finally embrace location-based services. Some industry analysts say indoor location may take off in as few as 12 months — particularly if smartphones include the feature in new product offerings.
At several location industry conferences, the obligatory indoor positioning panel is cropping up, leading some to believe that while intentions are good, perhaps the technology hasn’t developed fast enough. The jury is still out on indoor positioning. “It is badly needed, but also needs to be down to the meter-level,” said Ralph Eschenbach of Sand Hill Angels, a venture capital firm, at the recent GPS-Wireless 2012 conference. “The technology is not here yet.”
Another contrarian said that industry segments like automakers need not just show users how to navigate to destination, but give folks information when they near the area. “It would be nice if a BMW told me where’s the cheapest gas,” said Gary Gale, Nokia director of places, location and commerce.
Some analysts, like those at IMS Research, believe that an indoor positioning technology will be from multiple sources — though Wi-Fi has been the primary tech solution. IMS cites reports that say Bluetooth in Nokia’s HAIP can meet the one-meter threshold of accuracy for indoor markets.
IMS said the major indoor positioning players, so far, are Google, Qualcomm, Broadcomm, CSR, Qubulus, Nokia, NextNav, and Path Intelligence.
While intangible benefits such as measuring consumer behavior and shopping experience will be important for retailers and advertisers who are hoping to fund indoor positioning systems, the goal is to drive customers to the stores. This will also be tied into the “what do I do when I get there” answer to the navigation question.
Still, the benefits will be transparent to advertisers once consumers are able to save time, and perhaps money, with indoor positioning capability on their smartphones, said Ankit Agarwal, CEO of indoor positioning company, Micello. “There is definitely a business model for indoor positioning. It enables product search and walking paths throughout a store,” he said. “Stores will be able to track multiple routes folks are interested in taking [through a store].”
Once again, Google seems to be the major player in indoor positioning. LBS Insiderreported late last year that Google went indoors with the launch of Google Maps 6.0. The company has attracted some of the big-box retail stores such as IKEA, Macy’s, Home Depot, and Bloomingdales to have their stores mapped. However, a lot of the bigger malls, and Target and Wal-Mart, have not been mapped. The Google product tells customers what floor they are on in a building, but so far is only available for Android.
Google’s indoor mapping partners include 18 U.S. airports, which will open up more partners and LBS relationships in the future.
In other news, but related to indoor positioning and other LBS markets, Greg Tarr, partner at Rogers Venture Partners, said at GPS-Wireless: “There is no privacy…get over it.”
TomTom Launches Global Geocoding Web Service
As GPS World reported, TomTom launched a new volume batch geocoding web service late last month at the Geospatial World Forum in Amsterdam. Geocoding, the process of converting addresses into geographic coordinates to allow location analysis for businesses, is taking on a new twist with the new product.
“This not your father’s geocoding. The turn-around time to download the product will be attractive to companies,” said Dan Adams, TomTom vice president, location and live services. “When I was with GDT and we were acquired by Tele Atlas, it gave us more exposure to global geocoding. Since the TomTom acquisition, there has been a recasting of those products, with the same sort of dynamics, but bringing them to the Cloud.”
What Investors Look for in a Location Company
In a venture capital panel at GPS-Wireless, industry experts basically say that location markets mean more than just navigation now. They also have some strong opinions on the composition and strategies of companies they plan to invest in.
“We notice that some startups don’t have enough engineers,” said Sanjay Subhedar, Storm Ventures managing director.
Other VCs say they look first at the market size of the location niche, but still believe the personality of the company’s management team is important. However, there was no location market segment any VC agreed on; some were sold on the promise of enterprise markets; others believe a strictly consumer play is where the future is.
LBS Insider Covering ITS America Conference
Not a sexy show like CTIA or Telematics Detroit (which is being boosted by the connected car craze, despite its jaw-dropping price to attend), ITS America’s annual meeting this month in the Washington, D.C., area will feature connected vehicle sessions and government programs. Before market-centric conferences as Telematics Detroit and Where 2.0, ITS America, even with its government focus, was the only game in town for companies looking to get into the navigation and location business.
One of these “government programs” traditionally featured at ITS America is distracted driving sessions, which at least one analyst says younger drivers don’t want to be bothered with. “Only 20 percent of young consumers are worried about distracted driving [we found in our studies],” said Thilo Koslowski, Garnter vice president, who also said, unlike what some automakers and analysts believe, that a car is not a “laptop with four wheels.”
LBS Insider will be covering the ITS America annual meeting. If attending, contact us with your story ideas.
At the Mobile World Congress in Barcelona, Spain a few weeks ago, a company called Loctronix introduced meter-level indoor positioning technology. “In 50 meters, turn left to find Macy’s Department store” is not very far in our future. This technology and others one step closer to making accurate indoor navigation possible so you can navigate from store-to-store inside a shopping mall or even navigate to particular items within a particular store.
It’s all about sensor fusion. CSR’s SiRFstar V/SiRFusion technology uses data from all available satellite navigation systems from the U.S., Europe, Russia, China and Japan, as well as WiFi, cellular systems, accelerometers, gyros, and compasses. Loctronix calls their technology Doppler Aided Inertial Navigation (DAIN) and Spectral Compression Positioning (SCP) which allows them to obtain one meter positioning outdoors, indoors, and even underground without relying on external servers with the following features:
Client-based, sensor fusion software platform producing real-time position, speed, direction of motion, and heading information.
Optional integrated GPS/GNSS signal and navigation processing – using Loctronix’ SCP hybrid technology.
Fully integrated map-matching functionality with support for third-party map data.
Optional WiFi RSSI location and access point profiling.
Third-party LBS API support.
Multiple implementation options supporting existing smartphones and next-generation wireless devices.
Think about what would happen if indoor positioning is actually implemented per the above, able to deliver one meter accuracy. Less than ten years ago, the automobile Personal Navigation Device (PND) market was in its infancy. GPS positioning was clearly able to deliver the accuracy required for point-to-point street navigation. What makes the PND valuable is the outdoor map database. These are the highly detailed digital maps from Navteq/Nokia and TeleAtlas/TomTom that are inside 90% of the PNDs in the world. Drawing from this experience, it’s obvious that indoor mapping databases are going to be huge, not only the location of stores, but the location of items on the shelves within stores. A friend of mine works for a large national retail chain in the U.S. He said they’ve tried aisle-to-aisle navigation technology before, and it failed. It was too difficult for the shopper to use. What that tells me is that the demand is there, in a big way.
The PND market in the 1990s was messing around too, trying to arrive at a technology and price point for mass adoption. Indoor navigation is on the same path, only this time it won’t be Navteq/Nokia and TeleAtlas/TomTom leading the pack.
Broadcom Corporation, maker of semiconductor solutions for wired and wireless communications, has introduced a new location architecture to provide more responsive outdoor and indoor positioning capabilities for smartphone devices. With proven third-generation multi-constellation support and tight integration with sensor components and Broadcom’s connectivity sub-system, the new solution opens the door to innovative applications, such as indoor positioning and place-based mobile commerce, Broadcom said.
The architecture features a new GNSS chip that significantly reduces time-to-first-fix (TTFF) for outdoor positioning applications, cutting the time smartphone users have to wait when first checking their position, Broadcom said. The platform solution also uses data from inertial sensors, Wi-Fi access points (including those based on recently announced 5G Wi-Fi), and future technologies such as Bluetooth beacons to enable ground-breaking indoor positioning capabilities, such as “personal shopper” applications that can direct users to specific stores within shopping malls, and even specific shelves within those stores. In addition, platform integration with NFC enables smarter, more secure mobile payments, with users able to specify countries, cities or even stores where digital wallets can be used, Broadcom said.
The BCM4752 GNSS chip provides advanced multi-constellation support by simultaneously collecting data from four satellite constellations (GPS, GLONASS, QZSS, and SBAS) and using the best received signals, resulting in faster searches and more accurate real-time navigation. Building on the success of previous GNSS chips, Broadcom’s multi-constellation technology, coupled with advanced signal processing, provides faster positioning performance for improved user experience, especially in challenging urban environments where buildings and obstructions can dramatically impact accuracy and time-to-fix, Broadcom said.
The new chip and accompanying software are tightly integrated with Broadcom’s InConcert wireless connectivity sub-system, featuring the most advanced and complete technology offering in the industry. By developing its various connectivity components to operate as a unified system, Broadcom can offer more expansive location features that extend beyond GNSS capabilities, the company said.
Key Features and Benefits:
Enhances performance and reliability:
Acquisition engine with advanced multipath mitigation techniques provides faster time-to-first-fix performance in challenging environments, as well as a more accurate urban navigation experience.
Multi-constellation capability collects data from four satellite constellations (GPS, GLONASS, QZSS, and SBAS) simultaneously and uses the best received signals, resulting in faster signal searches and more accurate real-time navigation.
Low board space, power consumption, and cost:
Fabricated in 40-nm process, the BCM4752 is tiny, occupying 44 percent less board space in a device.
Integration of key components such a low noise amplifier (LNA) enables low bill of materials cost.
The BCM4752 uses 50 percent less power than previous generations, allowing location-aware applications to remain active for longer periods of time.
New applications such as geofencing that provide alerts or services based on location can be completely off-loaded from the smartphone’s CPU for ultra-low system power operation.
Opens doors to new applications, with a proven software platform capable of:
Ground-breaking indoor positioning through integration of Wi-Fi (including 5G Wi-Fi), Bluetooth low energy, NFC and handset inertial sensor data into positioning applications.
Urban navigation by applying handset inertial sensor readings into the position computation.
Assisted GNSS (AGNSS) with both GPS and GLONASS assistance data available worldwide from Broadcom’s hosted reference network.
Availability
The BCM4752 is production ready and shipping to early access partners.
Mobility’s first phase saw fixed-line communications go mobile. The next phase saw the Internet go mobile. We now behold a paradigm shift in the third phase, where real world communication bridges to the virtual world, via richer communications on smartphones.
For device manufacturers and location-aware service and app creators, it’s no longer about creating unique standalone experiences, it’s about enhancing real-time experiences by enriching everyday consumer behavior with virtual content and relevant information to a particular place and point in time. Location is an important canvas to a series of components that will unlock the possibilities of a more fulfilling, spontaneous — and sometimes amazing — mobile experience. By bringing together the quality of positioning and maps, enabling personalization with places and recommendations, evolving the simple check-in, and enhancing the experience with augmented reality, we activate a seamless, immersive experience that adds value to consumers’ daily life adventures.
Most importantly for wireless operators, location, as a key part of context and relevance, provides a unique opportunity to create revenue.
Location Positioning and Maps
As we create advanced mobile positioning technologies, consumers increasingly become accustomed to location-aware services. Outdoor positioning was our entrée into the market, and it has becoming more and more accurate via new satellite systems in addition to GPS (GLONASS, SBAS, QZSS), use of motion sensors, assisted-GNSS enhancements, and software algorithms to enable instant time to first fix (TTFF), and seamless fixes. On the other hand, pinpointing your location indoors still presents challenges from an accuracy standpoint.
At Nokia, we support Open Mobile Alliance Secure User Plane Location (OMA SUPL, incorporating AGPS and cell-ID) standards for our devices, and enhance our proprietary Nokia Positioning Service (NPS) based on leading-edge assisted-GNSS (GPS+GLONASS) technologies. Our NPS service supports global crowd-sourced databases for cellular tower and Wi-Fi access-point location information. These provide virtually instant TTFF everywhere and enable always-on location awareness — even on devices without an integrated GPS receiver or data connectivity.
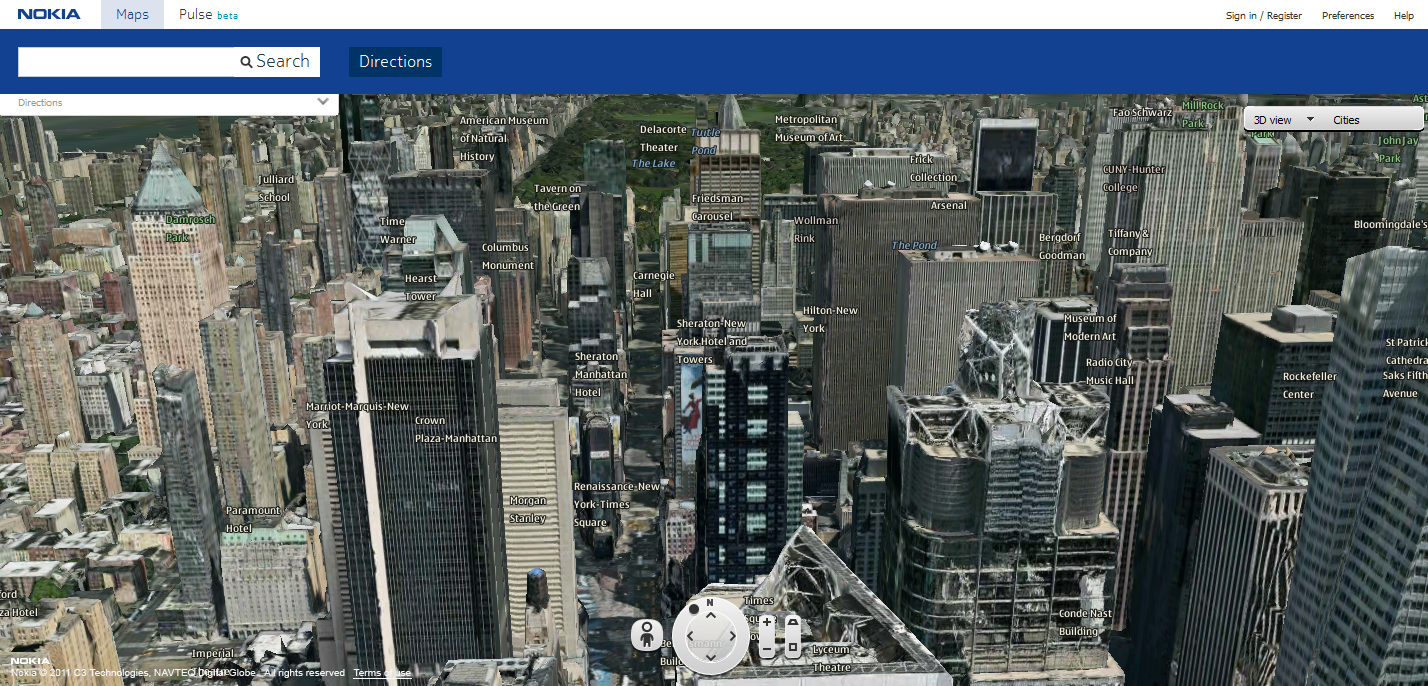
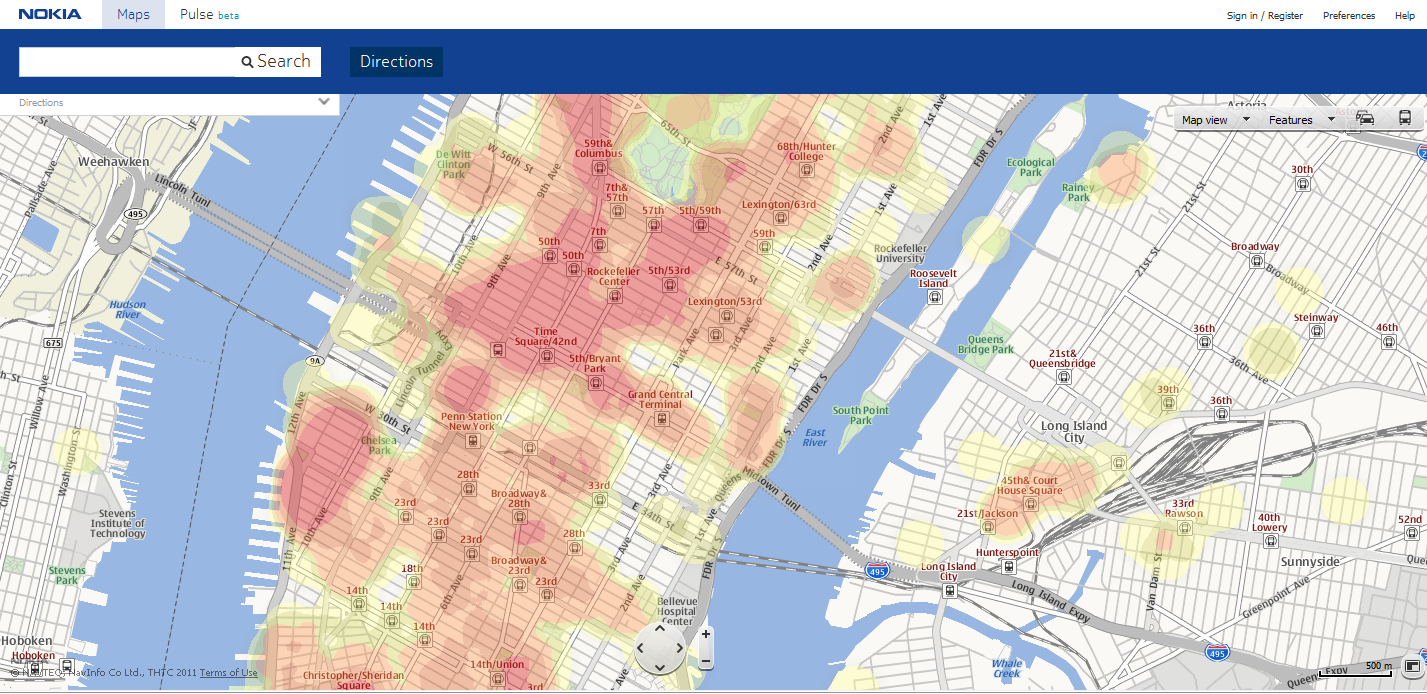
3-D Building overlay for real-world representation.Heat map. to see where the action is: concentrations of location-enabled mobile phone users that can provide data on places where others are dining, dancing, or shopping.
We’re also setting our sights on the next frontier: research concept around high accuracy indoor positioning (HAIP) technologies. Nokia’s current HAIP trial system relies on a dedicated positioning beacon, which acts as an indoor satellite when placed on the ceiling. It can accurately locate your position in a room and how far you are from your desired destination in real-time, with an accuracy of up to 30 centimeters. In this manner, we could direct a potential customer to a physical store front, and further to a specific product on the shelf inside the store.
HAIP beacon from Nokia, for high-accuracy indoor positioning.
Another example comes from Shopkick, with its own proprietary solution for indoor positioning that utilizes a similar beacon placed inside a retail store. On the device side, the ShopKick app listens via the mobile device microphone and alerts a company when a valued customer physically walks into its store. According to TechCrunch, one of Shopkick’s partner retailers “is estimating $50 million in measurable incremental revenue as a result of the Shopkick mobile app.”
The business opportunity is clear: retailers can now directly connect to the consumer for one-to-one marketing and engagement. Consumers are rewarded instantly, on the spot, and enticed to collect further rewards through loyalty programs.
Imagine enhancing this experience further with a visual representation of your position on a map in an outdoor situation, which can offer a wealth of functionality and create a 3D representation of the real world. At Nokia we are further enhancing our NavTeq maps that deliver accurate 360-degree panoramic street-level imagery, 3D building overlays and a point-of-interest (referred to as a place in this article) interface as individual layers. The map data collection provides individual high-density content layers that enable more fluid animation and 3D mesh building overlays. Users can highlight and select buildings and places to interact with in 3D within their surroundings. This merges the real and virtual world, allowing physical and digital objects to co-exist and interact in real time. Imagine the endless opportunities: zoom in on a 3D map of a restaurant storefront, click the menu on the window to see the special of the day, or receive a discounted offer based on something you have liked in the past.
Places and Recommendations
The way we interact with our mobile device is evolving to mimic the way we exist in the real world. When we refer to a place or to a location, for example, we don’t talk in terms of coordinates or an address, rather we say “the Starbucks around the corner from MOMA.” In building devices and applications, we build the place with the foundation of core data (name, address, longitude and latitude, contact details) and layer on top of that an ever-expanding amount of rich data that comprises ratings and reviews, hours of operation, wheelchair access and spatial data extended to entrances, and more. Thus, we begin to layer in context and we no longer need to know the Boolean constructs that we learned in Web 1.0 to talk to a search engine and find exactly what we want.
Managing this rich, evolving set of place data in a relevant manner will increase in importance. It will also open the door to getting recommendations outside of your normal social community. For example, heat maps that allow you to instantly see where the action is in cities around the world, quickly sharing insight into where locals eat, dance, and shop. Check out examples from Nokia (maps.nokia.com) and mobile apps like AroundMe or Foursquare Radar. Providing locally relevant content to end users also extends the opportunity to connect local merchants to their specific target audience or entice new ones.
JiWire reported in August that “53 percent of the on-the-go U.S. audience revealed they are willing to share their location to receive more relevant content. Mobile consumers under the age of 34 are more eager to share, with 60 percent offering their location for better information.” Focusing on the qualifier, “offering their location for better information,” is where places and recommendations become a powerful medium, and advertisements and offers become another valuable piece of the rich data set offered via your mobile device.
Consider a restaurant search that returns a result for a Chinese restaurant your friend has rated 5 stars for its Mongolian beef, which in the past, you have indicated you liked. As part of the information presented, you see a 15-percent off promotion when you view the menu prices. Or perhaps you’ve searched for a children’s museum, and navigation finds the destination and starts directing you from your current location. Upon arrival, you might receive an offer for discounted membership. As more consumers gravitate towards location-based or location-incorporating services on their smartphones, there’s a great opportunity for developers and business owners to integrate place and recommendation experiences.
Consumer Engagement
Utilizing positioning, maps, places and recommendations are the building blocks on which you can create contextually relevant experiences that consumers will find engaging and sticky and which can open the door to business opportunities. Research shows that consumers are willing to check-in to a location, either by text messaging or by using a mobile application on a smartphone; the application will use the phone’s GPS to find the current location. Many social networking services, such as Foursquare, Google+, Facebook, and Gowalla allow users to check in to a physical place and share their location with their friends. Comscore reported that “16.7 million U.S. mobile subscribers used location-based check-in services on their phones in March 2011, representing 7.1 percent of the entire mobile population.”
I still believe check-in remains a niche as it’s not a natural human behavior but is a good starting point for interacting with a location. Check-in needs to be bundled with offer redemption to encourage people to check-in. Also, check-in data can add a new layer of behavior that may not be reflected in recent purchases. For example, a check-in at a gym adds valuable lifestyle information about a consumer, which can aid in ad-targeting efforts.
Now more than ever, as we explore and engage with the world around us, we want to experience amazing everyday adventures. We can enhance this adventure further by augmenting the rich content associated with places in a visual representation that can be consumed through your mobile device in the real world. Imagine you’re in Times Square in Manhattan and you open an augmented-reality experience like Nokia City Lens or Yelp’s Monocle and start panning around you. Icons might pop up to indicate you have a loyalty card for a particular chain of coffee shop; a consumer electronics store has your favorite Wii game on sale; a good friend just gave a nearby restaurant a 5-star review. Perhaps you’ll even find you can get home in less than half an hour if you take a new suggested route that accounts for traffic that’s moving a little slower than usual on your typical drive.
The Opportunity Ahead
In this third phase of mobility, our mobile devices will be a bridge to enriching our lives with virtual content, as long as it is relevant and engaging. Location is a catalyst to enhance virtual interaction with real-world places, enticing people to visit such real-world places. For developers and marketers, business opportunities lie in using highly accurate positioning to drive consumers into storefronts and directly to the products they want; in enabling highly personalized experiences with places that present the right offer at the right time to the right consumer; and in elevating the check-in to engage and reward the consumer. Context, relevance, and consumer engagement will all provide unique monetization opportunities as location technology continues to evolve.
Christopher Peralta is head of location and advertising services for Nokia in North America, responsible for mobile navigation and location-aware services that connect users to locally and socially relevant personalized content and experiences.
Indoor location technology is evolving; indoor mapping is coming along and apps that seamlessly work in and out of doors will make a compelling experience more compelling. Bringing mobile location to indoors will stimulate our industry. The killer app? Apps that can self learn to be personalized to a user’s life, lived in and out of doors (check traffic before I leave my desk). Hop on board.
Indoor Mapping. The indoor market is getting more interesting as Google’s Street View Mapping edges indoors. In a new pilot project, Google is providing glimpses through the front doors of retail businesses. Restaurants, hotels, stores, and other venues will show a 360-degree inside perspective. The imagery will appear on Google’s Places pages, all using the same Street View technology that enables its other map images. The company’s plans are to eventually allow users to virtually enter indoor spaces from street maps. It is a way for businesses to entice new customers. Companies in the pilot volunteer for inclusion. The project links nicely to indoor mapping plans under way.
Finding Location Indoors. Cambridge Silicon Radio (CSR) introduced a new mobile phone processor to improve the accuracy of indoor navigation. It is a “self learning” indoor location platform that fuses real-time Wi-Fi, satellite positioning data, MEMS sensors, and crowd-sourced location data. The company claims it can achieve continuous and rapid indoor position fixes. The system’s distinction, says CSR’s Dave Huntingford, is it doesn’t require manual surveys to build and maintain its Wi-Fi and cellular location data base. The CSR system debuts next year.
Leading Vehicle Integration. “The automakers that can provide the most elegant integration of vehicle and mobile apps will lead the next revolution of providing social media and other capabilities in cars,” states a report from market analysts IHS iSuppli. Integration is critical as automotive infotainment will derive functionality from smart mobile devices like smartphones and tablets. Globally, Toyota and Ford lead in successful integration of car infotainment systems with mobile devices, IHS iSuppli reports. A study of production-ready applications showed that the Toyota Entune and Ford Sync AppLink apps had the highest performance on at least four criteria, including content variety, level of integration, daily relevance, and implementation.
Being Watched? The well-publicized case in front of the Supreme Court may define the power of police forces to put location devices on vehicles for surveillance. The court’s decision may extend beyond vehicles into the far more prevalent police practice of tracking cell phones. According to the Wall Street Journal, Los Angeles police tracked 295 phones, up 35 percent from the previous year. The paper reports that a magistrate in Texas who approves cell-tracking requests has used public records to estimate that U.S. federal courts issue 20,000 to 30,000 cell-phone tracking orders annually. In 2010, in comparison, state, local and federal courts approved a little over 3,000 wiretaps.
Location Data too Accurate? Precise location info spawns lawsuit. Customers concerned about HTC’s location tracking practices have hit the company with a lawsuit. HTC is charged with using the AccuWeather app to track customer’s precise locations and providing it to advertisers who use it for location targeted ads. It boils down to location precision. The suit claims that HTC collects “unnecessarily precise” location data. Weather is a regional phenomenon based on coarse location and can be easily determined by cell towers, and not the GPS data HTC obtains. The AccuWeather app is integrated into some HTC phones and cannot be uninstalled, according to the suit. HTC can be added to the honor roll of company blunders that fuel concerns about the misuse of location data.
New Innovators. Localmind was one of the winners at recent competitions for young location-oriented companies. This real-time, location-based clever Q&A platform leverages social check-in services. Users can ask questions of others. For instance, someone might query about waits at a restaurant, liveliness at a bar, or the state of the Wi-Fi at a coffee shop. Another winner, Tagwhat, offers a multimedia location guide that reveals videos, photos, narratives, and audio about the world around people wherever they go, based on the users’ pre-selected, customized interests such as food, music, movies, heritage, and sports. Containment in a personalized bubble may or may not be a good thing. A third winner, Right Back on Track (RBT), enables schools to reduce truancy and drop outs. The system lets schools and families know the whereabouts of truant students to enable interventions to attract the students back in school.
By Nicolas Couronneau, Peter J. Duffett-Smith, and Alexander Mitelman
Cell-phone users are often more concerned about the speed of positioning than the accuracy, making time-to-first-fix the most important factor in a GNSS mass-market receiver’s perceived performance. However, TTFF is generally difficult to characterize and optimize because of the need to encompass a wide range of environments, including indoors.
One method of characterizing the time-to-first-fix (TTFF) is to measure it directly, using a signal generator and a real receiver. This method avoids the approximations of analytical solutions, but it is usually time consuming and it does not provide much insight into the factors affecting the TTFF since it is gen erally not possible to change the receiver’s architecture. Another approach is to use Monte Carlo simulations and a model of the acquisition process. This approach is more flexible than direct measurement, but again it can take a long time to simulate weak-signal environments.
We have developed a third approach based on analytical methods but regulated by measurements of the signal-to-noise ratio in target environments. Using this approach, one can quickly calculate the probability distribution of the TTFF for different signal strengths and acquisition parameters.
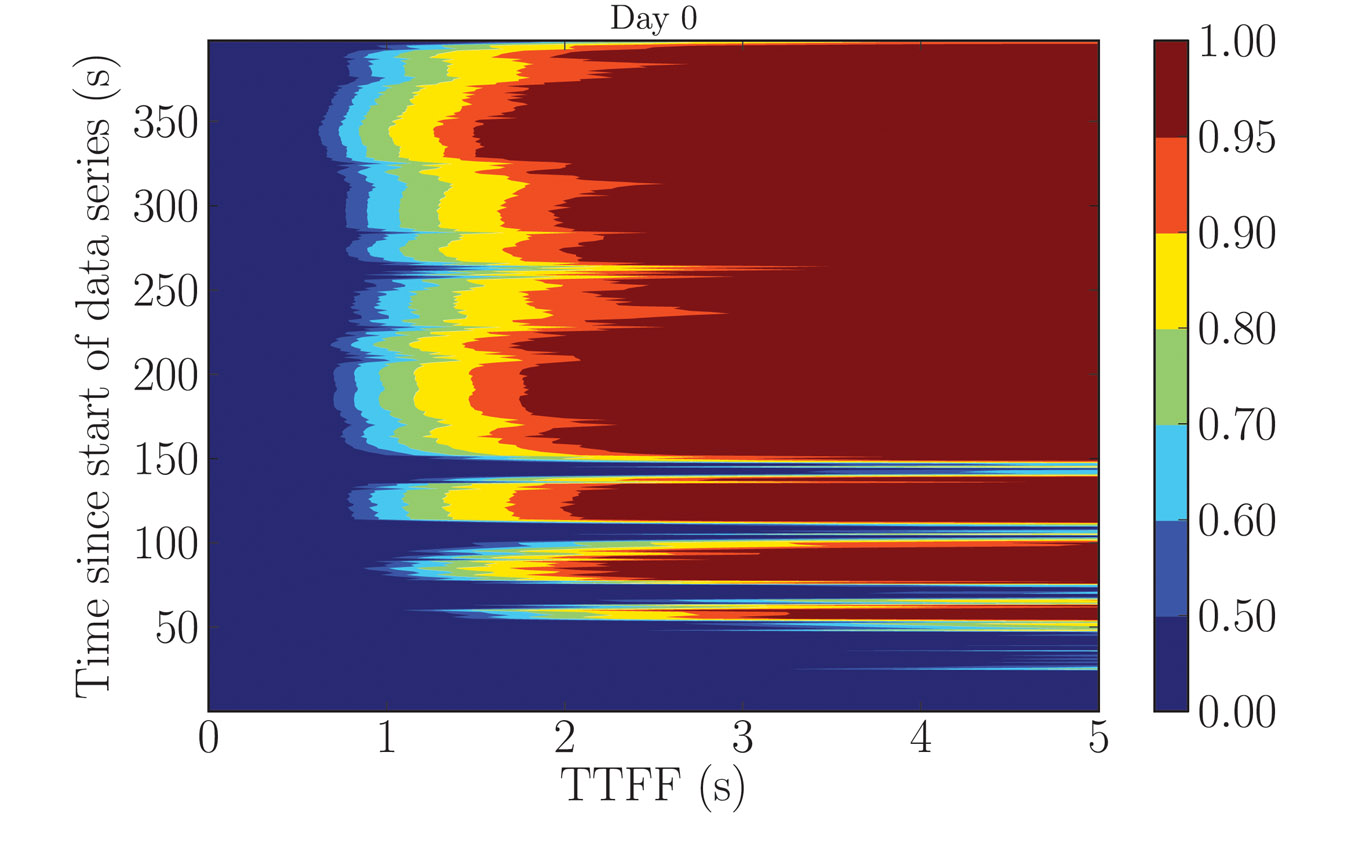
To illustrate this method, we consider a model of an assisted-GPS receiver combined with experimental measurements of the GPS L1 C/A signal taken indoors. The results are presented in Figure 1, where the probability of the TTFF (horizontal axis) is plotted as a function of the time after the beginning of the data series at which the acquisition process started (vertical axis), calculated using a 400-second GPS data series measured indoors. The strength of our approach is that we can quickly calculate the TTFF probability for any given confidence level and it is quite general so that it can be extended to other types of receivers.
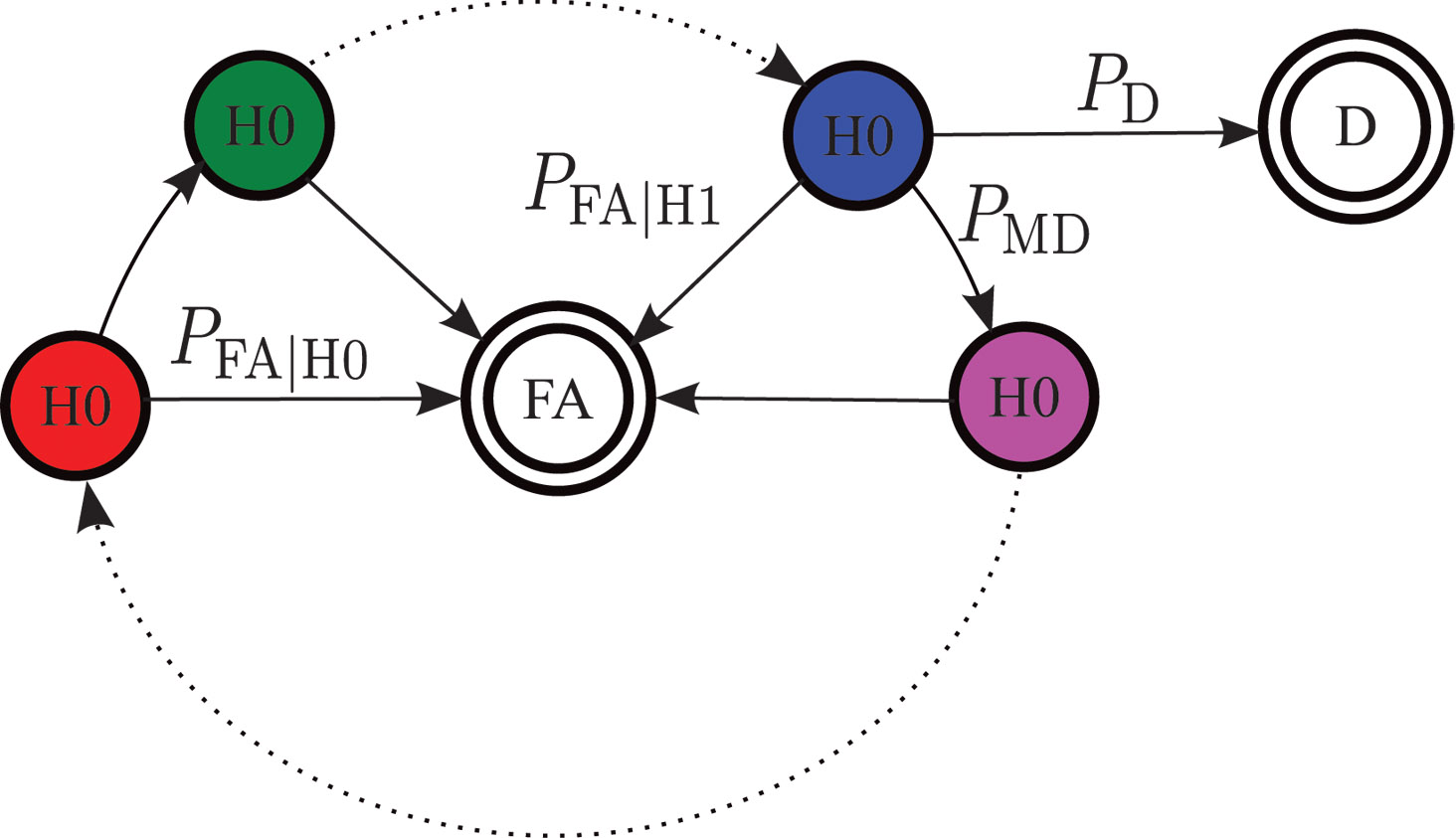
Flow-graph representation of the acquisition process for one channel. FA is the false-alarm state and D the correct detection of the signal from this satellite. H1 and H0 represent respectively states in which the signal is and is not present. PFA|H1 is the probability of false alarm in a window where the signal is present and PFA|H0 the probability of false alarm in a window where the signal is not present. P D is the probability of detection, and PMD the probability of missed detection.Figure 1. The probability of the TTFF (horizontal axis) as a function of the time after the beginning of the data series at which the acquisition process started (vertical axis), calculated using a 400-second GPS data series measured indoors. Note that the colored scale is not linear.
Modeling the Acquisition Process
A GPS receiver must first acquire signals from a sufficient number of satellites before it is able to calculate a position. This search is often the major contributor to the TTFF.
GPS Acquisition Architecture. The acquisition can be represented as the search for a specific, yet unknown, combination of three parameters in a larger search space. These are:
the Gold-code number used to generate the pseudo-random noise (PRN) sequence,
the code phase, and
the carrier frequency offset.
The last of these has contributions from the frequency offset caused by the relative motion of the satellite and receiver (the Doppler effect) and the frequency bias of the receiver’s local oscillator.
In general, signal detection is performed by correlating incoming signals with a local satellite signal replica for every combination of parameters in the search space. The correlated signal is then integrated and a “hit” is declared if the integrated value crosses a predetermined threshold. The time required to test for the presence of a satellite signal for each combination of parameters is called the dwell time. We suppose here that this is approximately equal to the integration time.
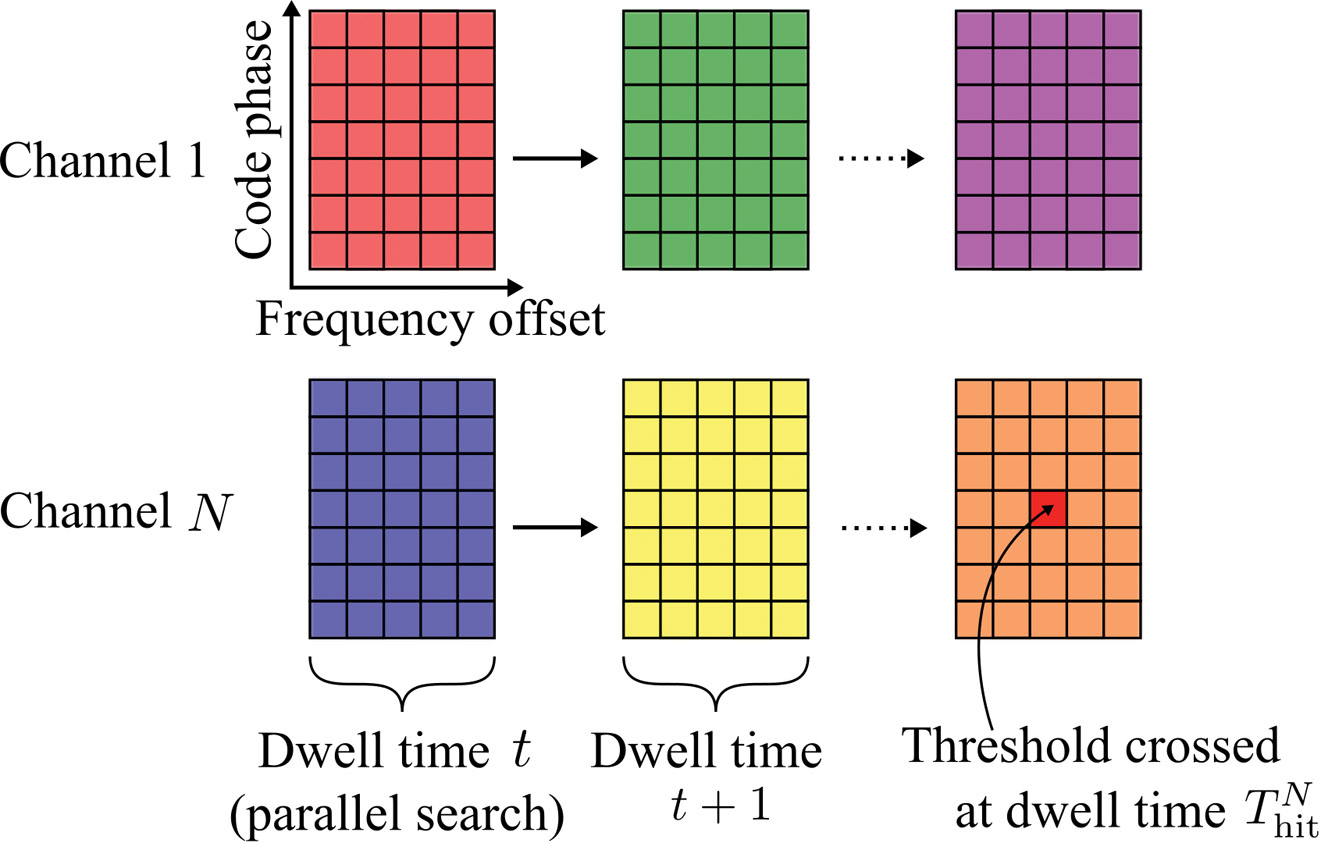
GPS receivers usually include some degree of parallelism. We consider a receiver having N channels, each channel dedicated to searching for signals with a different PRN sequence. Within a channel, the frequency and code-phase search spaces are further divided into several windows. We assume that all the parameter combinations within a window are searched in parallel, that is, within a single dwell time. This model of the acquisition process is outlined graphically in Figure 2.
Figure 2. An illustration of the acquisition process. The large colored rectangles represent the search windows and the inner smaller rectangles represent the different combinations of search parameters.
Parallelism can be implemented in hardware using massively parallel correlators or in software using fast Fourier transform-based techniques. The details of any particular implementation are not relevant here; only the number of channels, the number of windows, and the sizes of the global search spaces are needed.
Acquisition Time Probability Distribution. The flow-graph method provides a graphical representation of the acquisition process. An example is shown in the Opening Figure. Each node represents a state of the acquisition process at the end of a dwell time. The lines joining the nodes represent the transitions of one state to another with the given probabilities. Typical states during acquisition are false alarm, missed detection, correct detection, and correct non-detection.
The flow-graph method has already been applied to the GNSS acquisition problem, in particular for calculating the mean acquisition time of a signal in a GNSS receiver. Here we extend that work by considering the acquisition of all the satellites required for a position fix and, by deriving full probability distributions, we establish a model of an assisted-GNSS receiver.
The opening figure shows the various probabilities of transition that can be calculated from detector statistics.
Flow-graphs rely on the properties of the probability generating function (PGF) of a random variable. A PGF makes it straightforward to calculate the probability distribution of the total duration of a sequence of events of random durations since the PGF of the sum of random variables is simply the product of their PGFs. It is also straightforward to calculate the mean and standard deviation of a random variable directly from its probability-generating function.
Aside from these properties, PGFs are less convenient and less intuitive than probability distribution functions. A generating function does not provide a direct calculation of the probability of an event, unlike a distribution function. For instance, calculating the acquisition time at an arbitrary confidence level (for example, 90 percentile) requires a contour integral over the PGF. Furthermore, some operations are easier to perform on density functions, for example, calculating the probability of simultaneous events.
It can be shown that the probability mass function of a discrete random variable can be approximated from its generating function using a discrete Fourier transform. This property forms the basis of our method: using the fast Fourier transform (FFT), we can quickly calculate the entire acquisition probability distribution associated with the generating function of a flow-graph.
Assisted-GPS Model
We now focus on the specific architecture of an assisted-GPS receiver, such as is commonly found in cellular phones. In this type of receiver, the TTFF can be shortened by performing the acquisition in two steps.
The acquisition starts by searching for any satellite signal in a full search space in which every parameter takes its full range of values. The Doppler frequency of the first satellite acquired can be calculated using assistance data and then removed from the observed frequency offset to give the contribution to the frequency offset caused by the receiver’s clock frequency offset. This is common to all search channels and can be removed from the remaining search spaces.
The second stage of the acquisition is thus performed for the remaining satellites over a reduced search space.
Stage 1 Full Search Space. The first threshold crossing for a single satellite is characterized by the time-to-first-hit (TTFH). Using an FFT, we can calculate the distribution function P(Thitfull ⩽ t) of the time-to-first-hit Thit(k) of the kth channel.
Mathematically, the time to first hit across all N channels, Thitfull, is the minimum of {Thit(k)}, whose distribution function is calculated by:
We assume that we have no means of detecting a false alarm at this stage and so the frequency parameter of the first threshold crossing is used to calculate the receiver’s clock frequency offset. This crossing may, of course, be a false alarm, and we take this into account later.
Stage 2 Reduced Search Space. At the reduced-space stage, the goal is to calculate the probability of having acquired M satellites out of N channels. The value of M depends on the number of pseudorange observables needed to solve the position equation. High-sensitivity assisted receivers that do not have signal tracking loops can only measure fractional pseudoranges together with an uncertain number of integer code periods. Using a coarse position estimate of the receiver, this uncertainty can be resolved, and a 3D position fix obtained, by using M = 5 satellites.
Calculating the detection probabilities at this stage involves some combinatorial arguments. In the following, (Ωm) represents the set of all combinations of m elements from the set Ω. For example, if Ω = {a, b, c}, then (Ω2 ) = {{a,b}, {b,c}, {a,c}}.
The probability of having “hit” at least M signals out of N channels at time t is given by
In this equation, Ω = {1, …, N} represents the set of the receiver’s channels and Thit(k) is the time to first hit of satellite k. Because each satellite is received with a different signal strength, these random variables have different distributions for every satellite.
The probability of having correctly detected at least M satellites before time t, P(TDreduced ⩽ t), is calculated by enumerating all the possible combinations of hit and detection events. The probability of having at least one false alarm before a given time t, P(TFAreduced⩽ t), is simply calculated by taking the difference between the probability of a hit and the probability of detection.
The number of possible combinations grows quickly with the number of channels. For an 8-channel receiver, there are 35 combinations, and for a 24-channel receiver there are 8,855 combinations. If the number of summations is becoming too computationally demanding, one solution is to form sets of signals with similar strength, and perform the combinations over these smaller sets with an appropriate weighting. Within a smaller set, all the signals have the same signal strength and acquisition times have the same probability distributions — a situation that is similar to calculating the order statistics of a random variable, which is not problematic in the case of identical distributions.
TTFF Probability Distribution
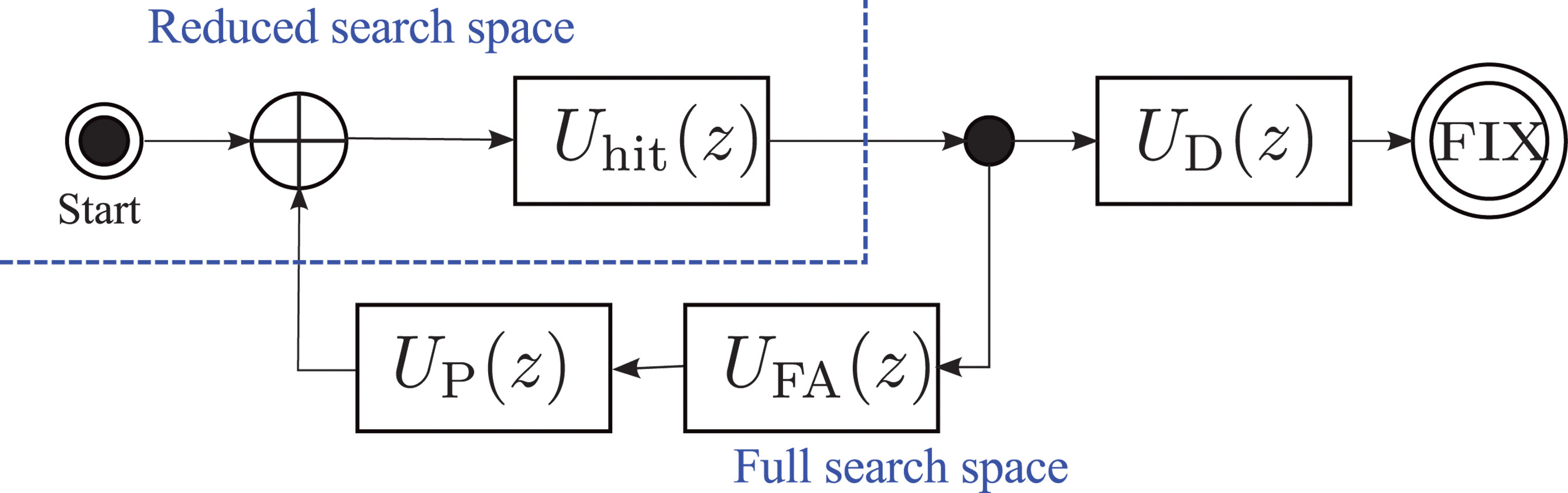
The last step before obtaining an expression for the TTFF distribution is to combine the two stages of the assisted acquisition. The total acquisition time is the sum of the time to first hit in the full-space stage and the time to the correct detection of M satellites in the reduced-space stage. This sum is easily calculated using generating functions, with the corresponding flow-graph represented in Figure 3.
Figure 3. Overall flow-graph of an assisted receiver. Uhit(z), UD(z), UFA(z), and UP(z) are the generating functions of the time to first hit in the full-space stage, the time to detections in the reduced-space stage, the time to a false alarm in the reduced-space stage, and the penalty time to recover from a false alarm, respectively.
Using the inverse of the FFT method presented above, we calculate the generating functions of the time to first hit in the full-space stage, Uhit(z); the time to M detections in the reduced-space stage, UD(z); the time to a false alarm in the reduced-space stage,UFA(z), and the deterministic time penalty to recover from a false alarm,UP(z).
Modeling false-alarms demands special attention. There is little information in the literature about the detection of false alarms in assisted-GPS receivers. One solution could be to detect a large residual error at the output of the positioning algorithm. Here, we take an easy path and simply introduce a penalty time, TPenalty, to represent the (deterministic) time needed to recover from a false alarm. The penalty time should be chosen to represent the behavior of a specific receiver.
For GNSS receivers capable of tracking the signals, the full pseudorange can be recovered after detection of a synchronization word in the navigation message. The duration of the tracking stage is a random variable, since the tracking can start at any position in the navigation message. Although we have not investigated this situation in more detail, we suspect that the tracking stage can be simply modeled by a uniform probability distribution. The length of this distribution depends on the navigation message structure and the amount of navigation data needed by the receiver to obtain a full set of decoded data. A new block can be added to the flow-graph in Figure 3 using the generating function of the uniform distribution, and the TTFF for a standard GNSS receiver can then be calculated.
Experimental Results
We analyzed the TTFF with the signal strengths measured in an office environment.
A picture of the office is shown in Figure 4. One side of this office has a window, but the sky view is obstructed by a large building a few tens of meters away. There is no direct line of sight to a satellite, although the window may allow some strong reflected signals to get in to the office.
Measurement of Weak Signals. Direct measurement of the strengths of indoor signals can be challenging since the signals are often too weak to be tracked reliably. We used a Nordnav R30 dual-input receiver with one input connected to an outdoor antenna mounted on the roof of the building and having an unobstructed view of the sky. The other input was connected to an antenna in the office. We used the tracking information from the stronger outside signal to track the indoor signal.
The signal carrier-to-noise density ratio (C/N0) was recorded for 400 seconds, starting every day at the same sidereal time, for six consecutive days.
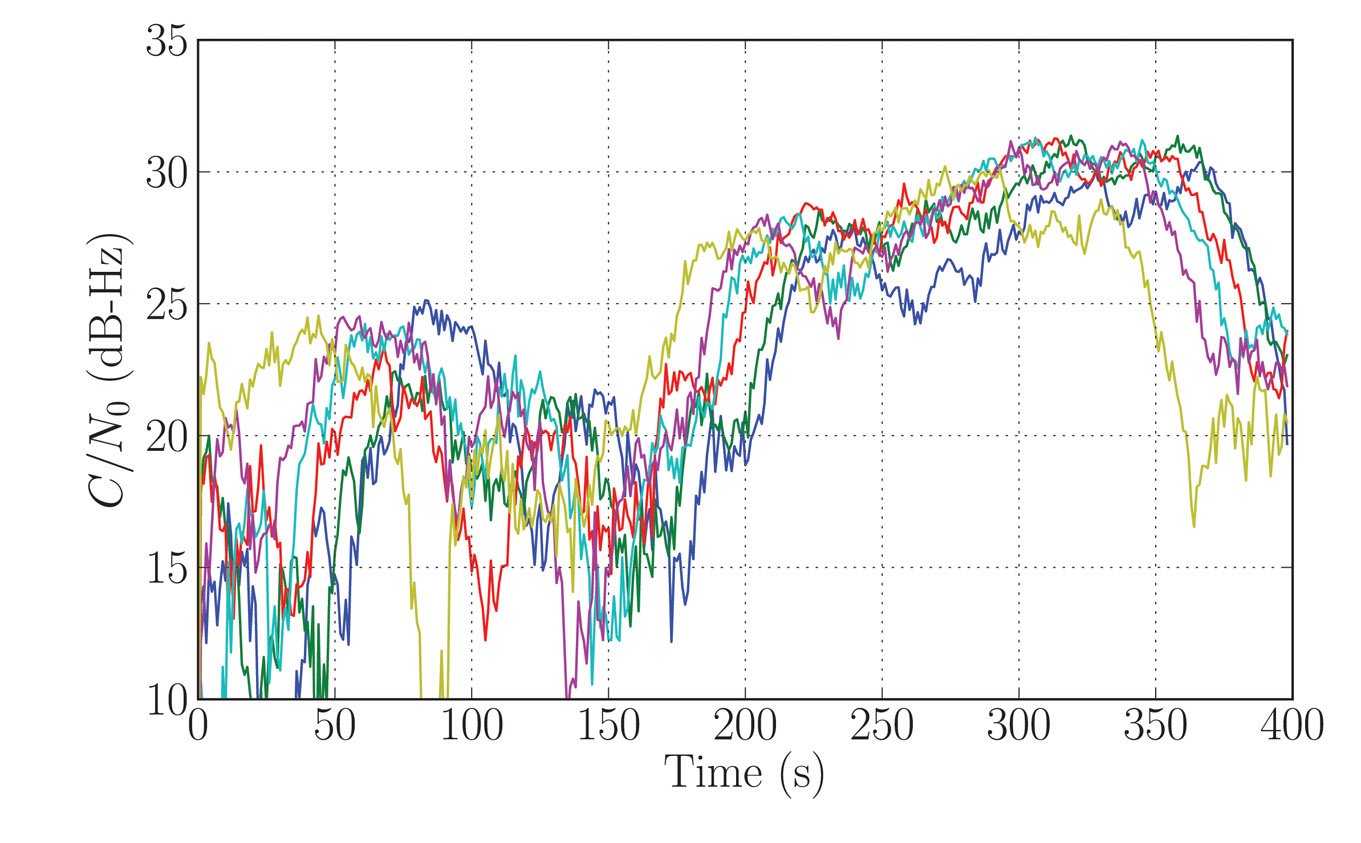
Figure 5 shows the signal strength for one particular satellite (GPS PRN9). We see that the signal strength follows a similar pattern every day. This is representative of a multipath fading environment: the signal coming from the satellite is scattered in the office, and the resulting signals interfere constructively or destructively, depending on the phase difference between the different paths. The overall signal strength is therefore related to the relative position of the satellite which, for GPS, is about the same every day at a given sidereal time.
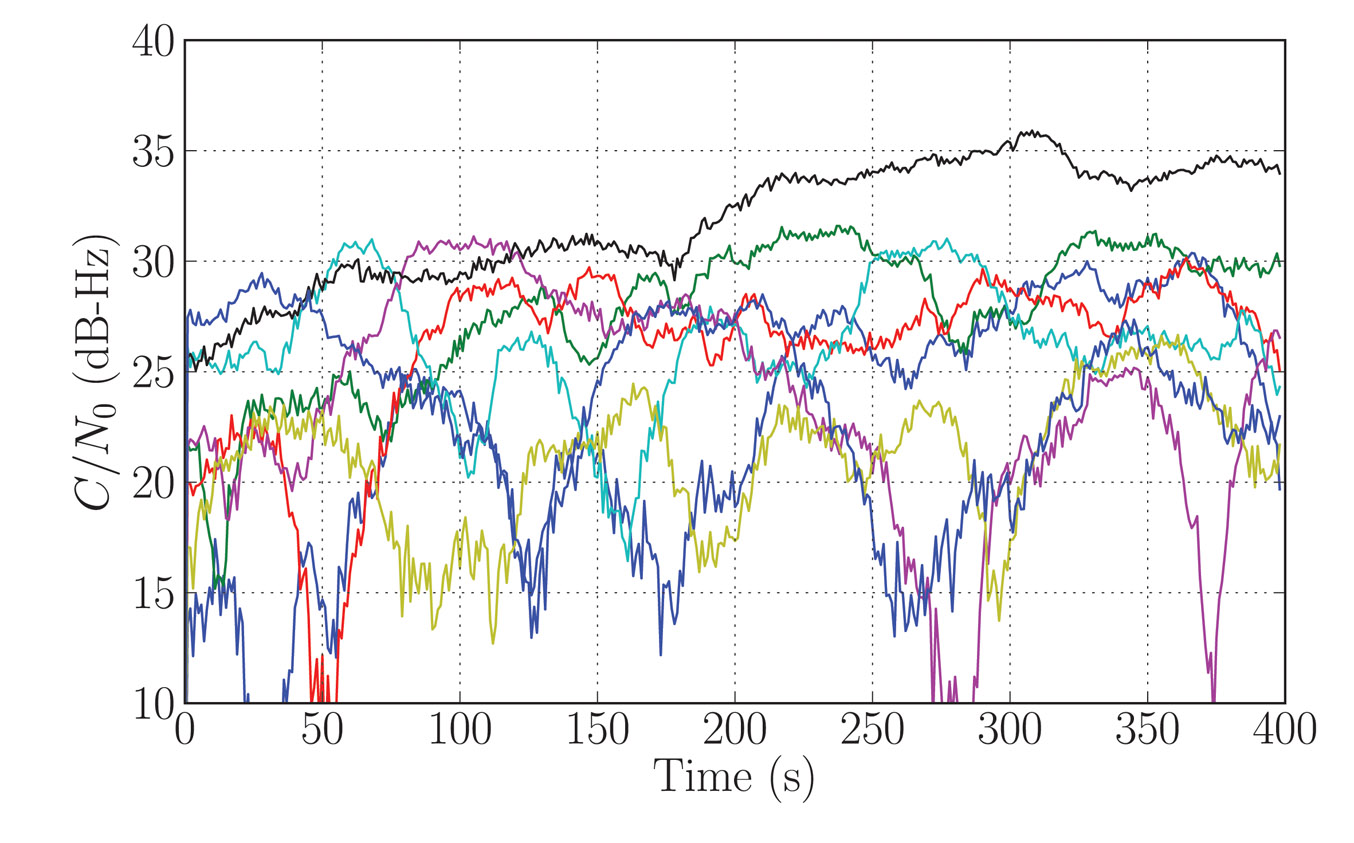
The variations of the signal strengths of all the observable satellites show fading patterns which are uncorrelated, as we expect the satellites to be spread across the sky (see Figure 6). It is difficult, if not impossible, to predict the distribution of signal strengths at any specific instant, and so the TTFF varies depending on the instant at which the acquisition process begins.
Figure 5. Indoors signal strength (C/N0) for satellite PRN09. Each colored curve represents the signal strength measured on a different day, starting at the same orbital time.Figure 6. Measured C/N0 for all observed satellites during the first day of recording.
TTFF Indoors. We now apply the signal strength measurements (Figures 5 and 6) to the TTFF calculation method presented above. This allows us to determine the probability of the TTFF as a function of the starting time of the acquisition since the beginning of the data recording.
We chose the detection parameters as follows: the coherent integration time was 1 millisecond, the non-coherent integration time was 300 milliseconds, the threshold was set for a probability of false alarm of 10–6, the time offset of a code phase was between 0 and 1 milliseconds, the penalty time for a false alarm was set to 600 milliseconds, and five satellites were required to solve the position equation. The ephemeris, a coarse position within 150 kilometers of the true position, and a coarse time within 30 seconds of the GPS system time were provided by the assistance data.
The results (see Figure 1) provide some insight into the acquisition process.
We can discern two patterns in the TTFF distribution. During the first 150 seconds of the analysis, that is, if a real receiver had started acquisition during that time, the TTFF showed large variations. This was caused by the multipath. The fading of the signals from the various satellites, although uncorrelated, led to severe degradation of the TTFF when the acquisition was started during a combination of strong fades. In our analysis, we have made the simplifying assumption that the strength of any particular satellite signal remains constant over the acquisition period.
After the first 150 seconds, the TTFF became more nearly constant. On examining the C/N0 time series, it was clear that the reason was the appearance of a signal from the satellite with PRN 27 (black curve in Figure 6) which was consistently stronger than the remaining signals after 120 seconds. This satellite had the highest elevation (more than 60 degrees) and the reception was probably by transmission through the ceiling of the office. In this situation, the phase difference between the reception paths was small, hence there was little fading. This single satellite significantly improved the TTFF, in particular by shortening the time of the first stage of the assisted-acquisition process.
It can be shown that the distribution of the acquisition time of a satellite, at a given starting time, can be approximated by an exponential distribution. This distribution explains the non-linearity of the relationship between the TTFF and the probability of fix, as observed in Figure 1. The non-linear effect becomes important when calculating the TTFF at a given performance level. In our example, the 50-percent probability of fix was about 1.2 seconds. Moving the requirement to 90 percent made it about 2 seconds, and 95 pecent about 2.5 seconds.
Conclusions
In presenting a method of calculating the distribution of the TTFF representative of a mass-market receiver indoors, we have seen how existing techniques can be extended and combined to provide an analytical model for assisted receivers. Power measurements of real signal show how the TTFF can vary depending on the combination of signal strength at the time the acquisition process is started. This suggests that an improved strategy for acquisition in large search spaces might be to start two or more independent acquisition processes, separated by, say, 1 second, in order to benefit from the advantage of one of the signals appearing strongly after a fade.
The lead author gratefully acknowledges support for this research from Cambridge Silicon Radio, CSR plc.
Nicolas Couronneau is a Ph.D. student at the Cavendish Laboratory, University of Cambridge, UK. He graduated as an electrical engineer from Supélec, France. His research interests are in the area of probabilistic methods applied to the acquisition of GNSS signals.
Peter J. DufFett-Smith is reader in experimental radio physics at the Cavendish Laboratory. His Ph.D. was in radio astronomy. He is the founder of Cambridge Positioning Systems Ltd. and, with others, invented the Matrix positioning method and Enhanced-GPS technologies. He holds more than 20 patents, and is a consultant to the GPS Group at Cambridge Silicon Radio.
Alexander Mitelman received his Ph.D. degree from Stanford University in electrical engineering. His research interests include signal-quality monitoring, algorithm and system design, and the development of testing methodologies for GNSS and hybrid systems.