Bynav Technology Co. Ltd. has released the C1 GNSS RTK OEM receiver and the A1 industrial-grade IMU-enhanced GNSS OEM receiver based on Bynav GNSS baseband ASIC Alita and RFIC Ripley. Bynav supplies GNSS high-precision receivers to the Chinese vehicle driver-testing market.
The C1 GNSS RTK OEM receiver board measures 46 × 71 mm and supports dual-antenna heading and full-constellation, including GPS, BDS, Galileo, GLONASS, QZSS, NavIC and SBAS, as well as providing enhanced interfaces like UART serial port, Ethernet, 3 EVENT_IN, 3 EVENT_OUT, 1PPS and CAN bus for easy integration with an external inertial measurement unit (IMU), odometry, lidar or visual SLAM.
The A1 GNSS/INS OEM receiver, measuring 46 × 71 mm and weighing 25 g, is integrated with an industrial-grade IMU (gyro 2.7deg/hr) with an embedded, deeply coupled GNSS+INS algorithm engine as well as tilt measurement algorithm to provide stable, high-precision position and attitude even in the event of GNSS outages.
Most of the vehicle driver testing centers in China have automated their exams with the assistance of GNSS high-precision positioning. As a strategic partner of Duolun Technology, China’s driver-testing system integrator, thousands of drivers testing vehicles equipped with Bynav GNSS RTK receivers are moving around China every day.
The R&D team of Bynav has taken part in the construction of China BeiDou Satellite Navigation System since 2002. With a powerful and experienced GNSS experts’ team and large-scale scenario verification on dynamic driver-testing vehicles, Bynav has successfully developed the high-precision GNSS baseband ASIC Alita and the RFIC Ripley which have been now integrated in the A1 and C1 products.
The performance of the A1 and C1 have been verified and recognized by many domestic customers in the field of vehicle driver testing and autonomous driving.
“We are committed to developing intelligent driving vehicles and commercializing them as soon as possible, in which the GNSS/INS receiver plays an important role to provide absolute position,” said Ying Long, deputy general manager of the Changsha Intelligent Driving Institute, a well-known autonomous driving company in China. “That’s why I started work together with Bynav for a cost-effective and high-performance positioning solution. Currently, the Bynav’s GNSS/INS receivers have been used in our unmanned sweepers, self-driving trucks and other products, and it comes out that the A1 performance is comparable to the world-class and high-end products we used.”
Both receivers support dual-antenna heading and full-constellation and full-frequency tracking (including BDS-3 and L5), and provide SD card interface for raw data storage.
Both C1 and A1 are now available for direct purchase. For wholesale price, contact [email protected].
Sensonor has launched two new navigation devices. The high-accuracy tactical-grade STIM277H gyro module and STIM377H inertial measurement unit (IMU) are based on experiences and requirements from serving customers in the space segment during the past decade.
The modules have a hermetic aluminum enclosure with a glass-to-metal sealed electrical micro-d connector and a laser-welded lid to secure long-term hermetic operation.
All parts are tested for fine and gross leak to conform to MIL-STD-883J, Class H. The hermetic enclosure protects the system from the external environment and ensures long-term reliability to meet requirements within the space segment and other applications needing exceptional long-term reliability.
The design is tested for a 20+ years’ operating life through high-temperature operating life (HTOL) testing. STIM277H and STIM377H are electrically and mechanically backward-compatible with Sensonor’s other IMU and gyro modules, and provide users with an easy implementation into an existing design.
The components come in dust-free clean-room packaging and have SurTec650 as the only surface treatment. The components are International Traffic in Arms Regulations (ITAR)-free, and have a range of features that can be configured by the customer.
While the new part is still a commercial off-the-shelf (COTS) product and not space-qualified, Sensonor has carried out extensive radiation characterizations to understand the capability of the parts. This data is available on request from Sensonor or can be downloaded.
The parts are a good fit for satellite attitude and orbit control systems (AOCS), launchers, portable target acquisition systems, UAV payloads, land navigation systems, turret stabilization, missile stability and GNSS-supported navigation systems.
An applications engineer and his sky-jumping bud don wingsuits to test a NovAtel GNSS receiver integrated with an Epson IMU.
In September 2019, a specialized team assembled at an airstrip outside of Edmonton, Alberta, Canada. Their mission: Put the Hexagon | NovAtel PwrPak7D-E2 enclosed receiver through tricky test procedures that involved jumping out of an airplane at 10,000 feet.
Taking the NovAtel SPAN receiver to the skies was the brainchild of Andrew Levson, who is both a NovAtel engineer and a skydiving aficionado. He proposed using a wingsuit to test the receiver’s positioning accuracy.
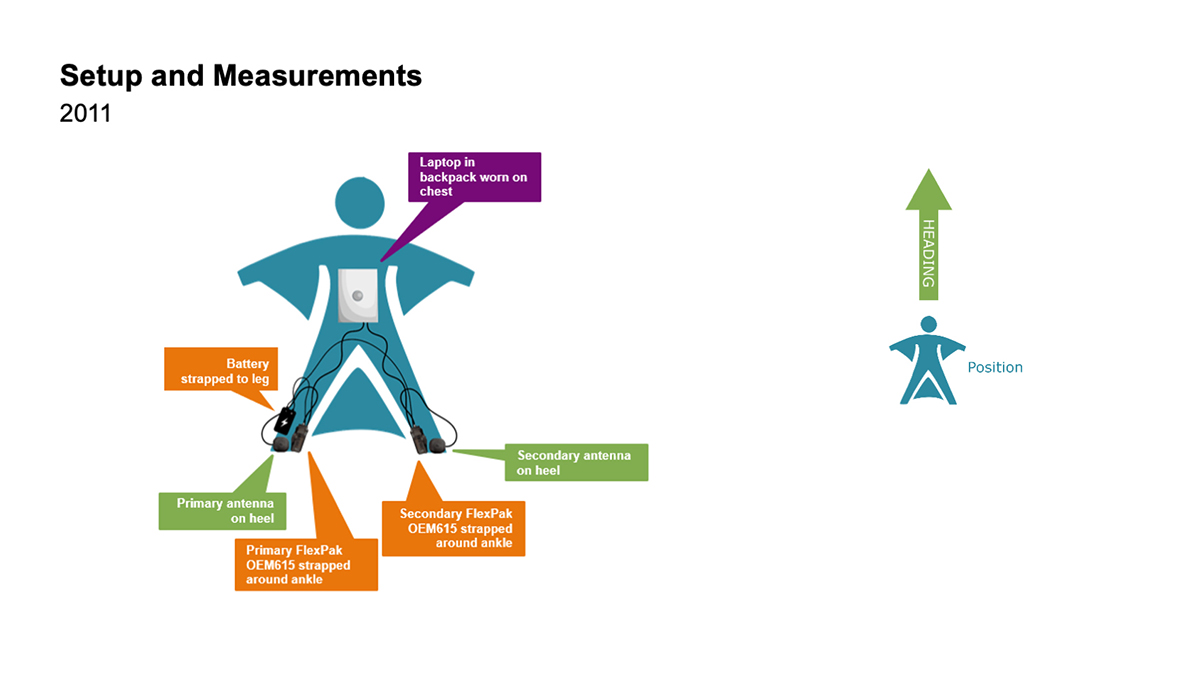
The first wingsuit dive took place in 2011, with NovAtel’s OEM615 receiver and ALIGN heading technology.
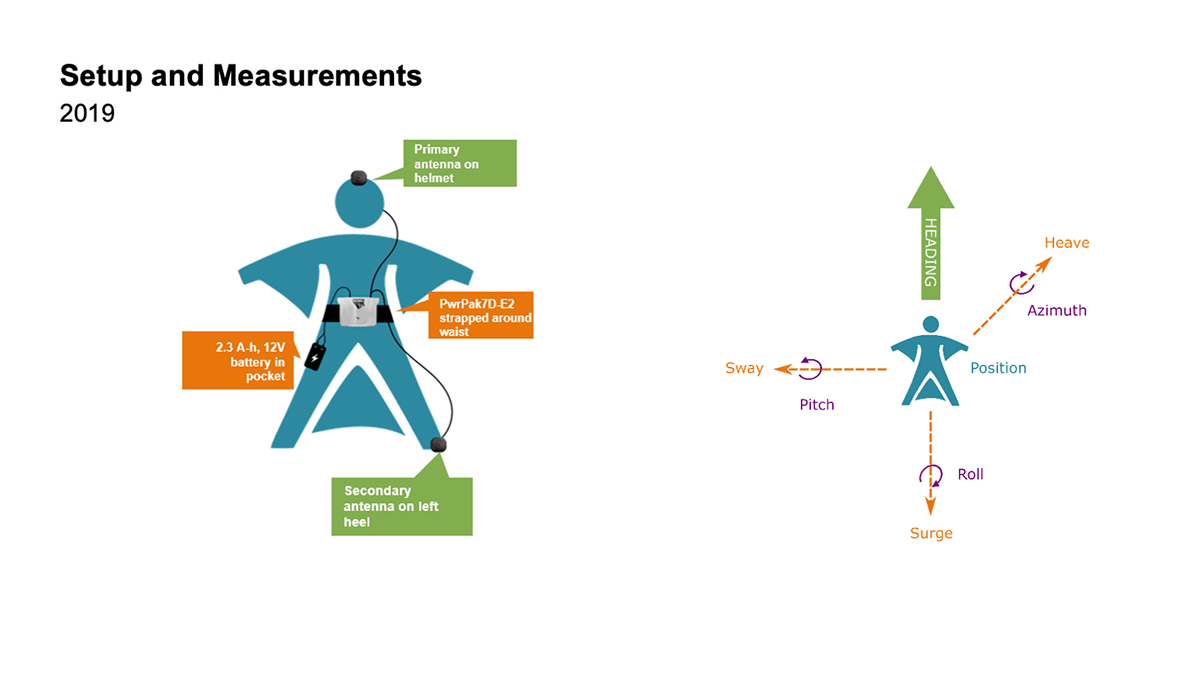
This time, the engineers aimed to test both NovAtel’s GNSS receiver featuring SPAN tightly coupled GNSS+INS functionality and its new companion, the Epson G370 inertial measurement unit (IMU). Both are packed in the PwrPak7D-E2 to provide uninterrupted positioning even in GNSS-denied environments.
Wingsuit jumpers Andrew Levson (right) and Blair Egan suit up for the NovAtel tests. (Photo: NovAtel)
“We chose to revive the project, given that equipment has evolved with more comprehensive capabilities,” said Patrick Casiano, manager of Product Management and Applied Technology, NovAtel. “Between 2011 and 2019, we could significantly reduce the payload while increasing value in the data.” In 2011, NovAtel was only able to monitor Levson’s heading. In 2019, the team captured heading, azimuth, pitch and roll measurements.
“We wanted to prove that our equipment can work in a high-dynamic environment, which isn’t necessarily ideal conditions for collecting positioning data,” explained Kiera Fulton, associate product manager, Enclosures and Post-Processing Software, NovAtel. “By proving our products work in a less-than-ideal environment, we exemplify how robust our solutions are.”
Photo: NovAtel
Test Preparation
For the 2019 test, the team chose to gather attitude data. The team also asked Levson to perform specific skydiving maneuvers to rigorously test the positioning solution. “Rather than performing just a simple flight to the ground, we wanted to challenge the solution to reveal more,” Casiano said.
The test was not easy to implement. A lot of behind-the-scenes planning and preparation went into the project. Plus, unforeseen factors made the test more challenging, Fulton said, such as logistics and weather.
“The skydivers require specific weather conditions in order to jump safely,” Fulton said. “Considering how quickly the weather can change here in Alberta, the time windows in which the skydivers could safely jump were few and far between. We pulled through regardless of these adversities.”
When the day of the jump came, the skydivers jumped five times — as many jumps as the weather would permit. “Theoretically, one jump is enough,” Casiano explained. “But as engineers, we always want to have more data to work with.”
2011 wingsuit jump setup. (Image: NovAtel)Wingsuit Jumps Compared: Because of the PwrPak7D-E2’s small size yet strong processing power, Levson required fewer devices in 2019 than in 2011, when he was equipped with two receivers, two antennas, a laptop and a battery. The amount of positioning data also increased. (Image: NovAtel)
High-Flying Maneuvers
The skydivers executed four maneuvers during their jumps.
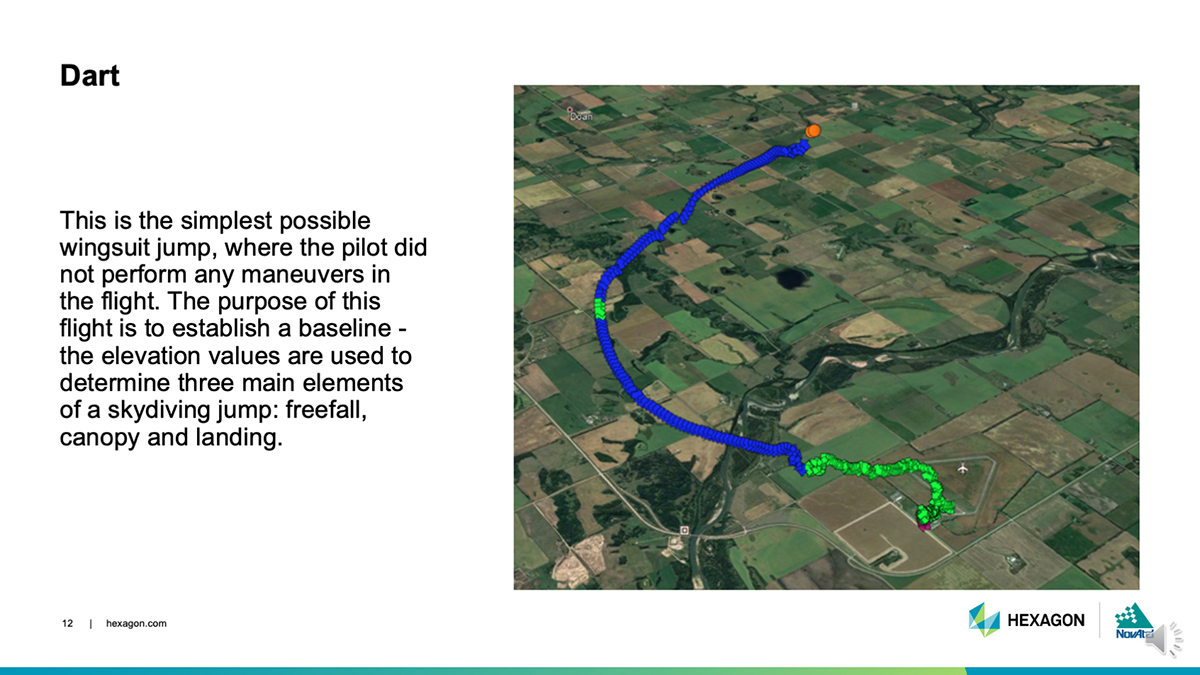
DART: This simple jump established a baseline for more complex maneuvers to follow. (Photo: NovAtel)
Dart. The skydivers first performed a straight jump, which the team called the Dart. The data from this jump provided a baseline for analyzing the positioning and attitude data.
“This was more important for the attitude analysis, as we have never collected inertial data in a skydiving jump before,” Fulton said.
S-Turn: One of three completed maneuvers. (Image: NovAtel)
S-Turn. Next came the S-Turn. In this maneuver, Levson weaved from side-to-side to test how the equipment handles agile movements.
For the S-Turn, the engineers anticipated seeing the biggest changes in roll. “We were pleasantly surprised to see that the S-Turn is detectable in the azimuth data as well, indicating high correlation between roll and azimuth in a skydiver’s movements,” Fulton said.
The maneuver revealed that when Levson rolls, his body is using less surface area for wind resistance. As a result, he was falling to the ground faster, which then meant the dataset is shorter.
“This became another challenge during data processing, as the free-fall portion of the datasets were now becoming less than 3 minutes in duration,” Fulton said.
Data from the S-Turn also revealed the effect of crosswinds, which is detectable in the data.
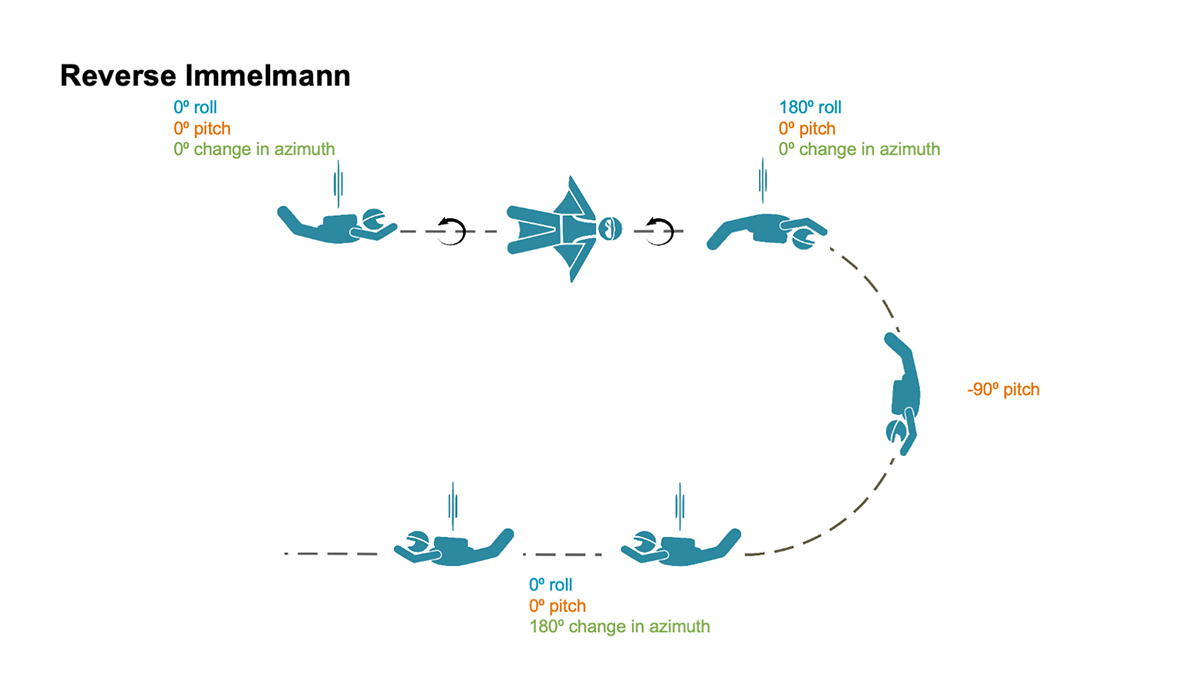
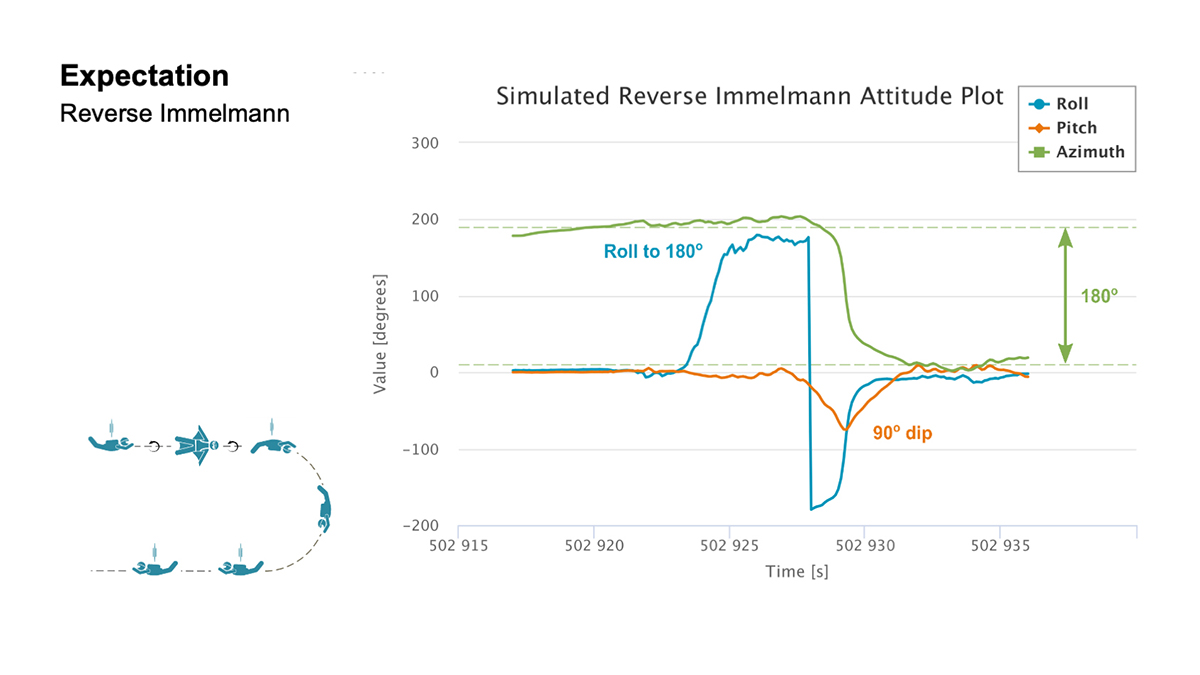
Reverse Immelmann: How the intricate maneuver works. (Image: NovAtel)
Reverse Immelmann. The third maneuver was the Reverse Immelmann. Levson flipped onto his back, began a downward turn until perpendicular to the ground, then leveled off, traveling in the opposite direction from where he began.
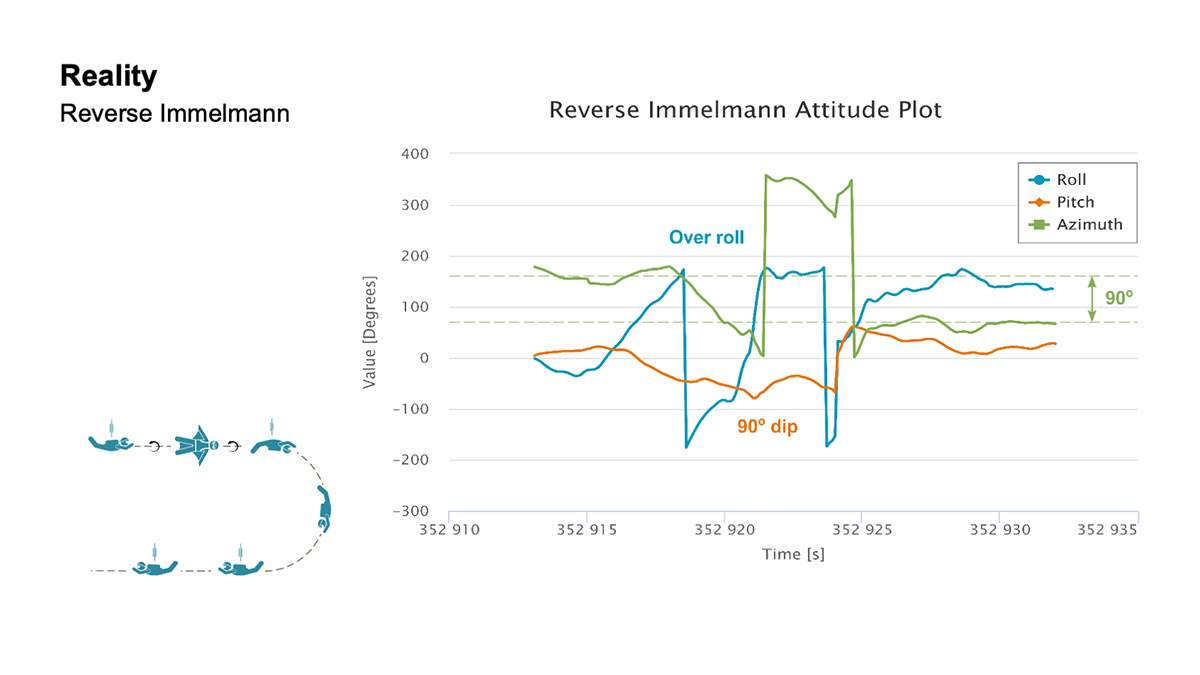
This complicated exercise provided data for all aspects of an attitude solution — roll, pitch and azimuth. By comparing the expected and real data, the team found several places where the maneuver wasn’t performed perfectly.
“There are many challenges once in the air that would have caused Levson to deviate from the trends in the data that we expected,” explained Fulton. “This is where we realized that our solution was working much more to evaluate the skydiver, rather than using the wingsuit to evaluate our product.”
Casiano agreed. “As a whole, the PwrPak7D-E2 was telling a story about Andrew’s flight,” he said.
The team also wanted to have the skydivers try a Cobra — a maneuver from aerobatics where an airplane momentarily lifts it nose and stalls — but time constraints prohibited it.
“If we had gotten this [a Cobra] recorded, it would have been detectable in the pitch and horizontal velocity data,” Fulton said. “Who knows what other findings we would have come across in this data!”
Measurement matrix: The asterisks (*) denote data values that can only be measured with an IMU. (Chart: NovAtel)
Applications
All these tests, of course, are designed to apply to real-world applications where the PwrPak7D-E2’s capabilities are used in dynamic environments.
For instance, an unmanned aerial vehicle (UAV) needs a feedback mechanism that tells the user whether it is moving or hovering. “In the wingsuit project, we proved that crosswind can be detected,” said Casiano. “This is an important finding for UAV applications, since a feedback loop from the PwrPak7 and the SPAN system can help rectify movement from external forces with counter propulsion to stay still. The PwrPak7D-E2 enclosures allow a data rate of up to 200 Hz, meaning you can capture motion with more detail.”
The PwrPak7D-E2 also works well for any black-box application where users want to record with the push of a button.
Inside the PwrPak7D-E2
Photo: NovAtel
The PwrPak7D-E2 is an all-in-one product. Its components are designed to work together seamlessly to provide positioning data, housed in NovAtel’s OEM7 firmware.
GNSS receiver card used to capture positioning data
Dual-antenna capability to provide accurate heading
Epson IMU to record attitude and motion
On-board logging to eliminate the need for constant monitoring on a PC
Post-Processing
Preparation enabled the team to process the data on site. The on-board logging feature on the PwrPak7D-E2 eliminated the need for constant monitoring during data collection. The unit is pre-configured so that at the time of the jump, Levson only needed to push a button for the unit to start collecting data.
Once the pair of skydivers landed, the ground team offloaded the data for processing, similar to using a memory stick, and moved it to a laptop computer.
“We pulled raw measurement data from the receiver and processed those measurements into position and attitude information,” Fulton said.
It took about 30 minutes to determine whether the dataset was viable. Later processing back in the office generated the charts such as those below.
Expectation: For both the S-Turn and Reverse Immelman maneuvers, a simulated plot was generated at the office to better understand the inertial data produced from the actual wingsuit jumps. (Chart: NovAtel)Reality: This chart shows the actual data. (Chart: NovAatel)
Dynamic Environments
Photo: NovAtel
The PwrPak7 series can be used in many environments in the automotive, agriculture, marine, defense and UAV fields.
“We are constantly trying to find ways to apply this product to other applications and industries,” Fulton said. “With more testing, we keep finding that the PwrPak7 can be used to solve more challenges.
“We want to push the boundaries of our products. True innovation comes from challenging yourself and hovering outside your comfort zone,” Fulton said. “For this project, we are more than satisfied with the results we found. In order to further challenge ourselves and this product, we look forward to applying the PwrPak7 in more scenarios.”
“The PwrPak7 is a robust unit that sets us up for more exploration,” Casiano said. “We are always looking for more challenges to put this unit through to see how the PwrPak7 can further help solve our customer’s problems.
But will there be more skydiving for NovAtel in Levson’s future?
“We could always revisit the skydiving project in another nine years,” Casiano said. “But who knows how the technology will evolve by then?”
Post flight: Blair Egan (right) and Andrew Levson back on Earth. (Photo: NovAtel)
What it feels like to take the plunge
For those of us who have never jumped out of a plane, engineer and skydiver Andrew Levson provides insight.
“It’s not as scary as people think. Because the plane is moving fast, it’s mostly just windy and loud. You don’t get that roller coaster type feeling; in fact you don’t feel like you are even falling — freefall feels more like floating than falling. You definitely wouldn’t know you are flying at speeds over 100 mph.
“When you are climbing out of a plane, there is nothing else on your mind aside from the jump you are about to do. It is pure freedom, and there is often no stress, just a sense of peace and an intense focus on your plan for the jump. Once you get out of the aircraft, you get to fly your body in the way that you want to — most people only know of the position of falling with your body arched and belly toward the ground, but there are many different ways you can orient your body. Some of the lesser known ways to fly your body include your arms and legs spread out while flying a wingsuit (with your belly or back toward the earth) or flying with your head pointing straight at the ground.
“When you skydive, you get to explore the sky with your friends, which is an amazing and unique experience. During a skydive, it is common to experience an ultra-focus during the jump — time slows down a bit and you can see and feel things that are seemingly beyond your typical capability.Many people are amazed at how much skydivers are able to do in the short period of time that a single skydive lasts — about a minute for regular skydives and about two or three minutes when flying a wingsuit.”
Empowered by a high-precision inertial measurement unit (IMU) on the Ultimate version, the Oscar from Tersus GNSS is a new generation of tilt survey receiver. Its calibration-free tilt compensation is immune to magnetic disturbances — holding the survey pole upright is no longer necessary. Powered by Tersus ExtremeRTK GNSS technology, Oscar can provide high accuracy and stable signal detection.
The built-in high-performance antenna can speed the time to first fix (TTFF) and improves anti-jamming performance. With a Nano-SIM card, Oscar can access the internet and transmit and receive correction data through 4G/Wi-Fi. The built-in UHF radio module supports long-distance communication. A detachable smart battery can display power levels. Two batteries support up to 16 hours of fieldwork in 4G/3G/2G-network and rover-radio mode. Oscar can be configured through a 1.54-inch interactive screen on the Ultimate and Advanced versions. The IP67-rated rugged housing protects it from harsh environments.
The Tersus Caster Service (TCS) helps surveyors set up a GNSS base station quickly to broadcast a correction stream via mobile networks. Natively supported by FieldGenius and Nuwa App, Oscar can be configured to different work modes to suit various daily jobs.
Satellite Tracking. Oscar supports multi-constellation and multi-frequency satellite tracking, including GPS, GLONASS, BeiDou, Galileo, SBAS and QZSS.
Accuracy. With enhanced positioning accuracy and constellation tracking, even in harsh environments, Oscar controls deviation within 3cm in surveying and mapping applications.
Quick Fix. Oscar can fix integer ambiguity rapidly after tracking satellites and receiving correction data: 3–5 seconds in the open sky, and 10–30 seconds under canopy or near buildings.
Not just supporting players, alternative positioning, navigation and timing (PNT) systems strengthen, augment and — when needed — replace GNSS. GPS World explores how companies are using alternative PNT, and talks with John Fischer of Orolia about the company’s latest developments.
GPS World: What are Orolia’s latest advances and products regarding alternative PNT?
John Fischer: Regarding timing, which we have been doing for decades, our big alternatives to GNSS are internal atomic clocks and network-based timing, such as precision time protocol (PTP). Regarding positioning and navigation, the two areas on which we focus are IMUs and getting updates from GNSS, so that, when you lose GNSS momentarily, you have something on which to coast. The breakthroughs in MEMS technologies are astounding —they are getting better and cheaper every day. That shows wonderful promise.
The other area is doing satellite navigation using low Earth orbit (LEO) satellites, which are much closer to the Earth than GNSS ones and give you 30 dB or more of signal strength. We are focused the most on the Satellite Time and Location (STL) signal because it is available today. Supplementing your navigation system with updates from LEO satellites provides you some great non-GNSS navigation capability.
GPS World: The positions of LEO satellites are not monitored as closely as those of GPS satellites. Is that an issue?
JF: That is correct. You are losing accuracy by using what is available today because you do not know the positions of those satellites as well as you know those of the GNSS satellites and maybe you do not have the best geometry. All the GNSS satellites are in medium Earth orbit (MEO) because they have much better geometries for a small constellation. With just 24 satellites in MEO orbit, you get great geometries. When you go lower, you need an increasingly greater number of satellites.
The first generation of LEO satellites, the Iridium STL, are a much larger constellation, with 66 satellites, but still not enough to give you the good geometries. Today, you are getting less accuracy, but there are all kinds of new satellites being launched and the capability to track them will improve. We expect to be able to use signals from hundreds, if not thousands, of LEO satellites, so the geometry problem will start to go away and there are other things we can do to improve the accuracy. Meanwhile, we can get rather good performance with what we have today.
GPS World: What are some of your most recent advances, releases or products?
JF: On the timing side we have what we call a mini-Rubidium, the mRO-50, which we launched on June 4. Smaller, better, cheaper atomic clocks are coming out very soon.
GPS World: Do you have any comments on the recent executive order on resilient PNT?
JF: We coined the term “resilient PNT,” so we are glad to see it in use. We fully support those efforts.
GPS World: What about other alternative sources of PNT data, such as radar, lidar and signals of opportunity?
JF: Yes, they are that next level. Loran is ideal because it is so different from GNSS. When you are trying to design a reliable system, you want a lot of diversity, because if two systems have the same kinds of failure modes you have not gained in redundancy. Loran is literally at the other end of the spectrum from GNSS: It is a low-frequency microwave system. Instead of being space-based, it is land-based; instead of being low power, it is high power. However, there still are no stations up. It requires big equipment, so it will take some time.
When it comes to what you can do today, Loran does not contribute much. We support efforts to implement Loran very much, because we do need non-GNSS ways to make things resilient. Prior to GPS, we had to depend only on Loran. Today, with modern digital signal processing (DSP) techniques and receivers, I think we can expect the new Loran system to have much better accuracies than we had in the bad old days of the first generation of Loran.
The auto industry is doing a marvelous job of doing navigation using lidar or cameras. They are pretty much navigating driverless cars the way that humans drive, by just using visual cues. Those things have promise in certain unique areas.
SBG Systems renews its popular line of miniature inertial sensors with high-end functionalities and dual frequency RTK
SBG Systems has announced the third generation of its Ellipse series of miniature inertial sensors. The renewed product line benefits from a 64-bit architecture, allowing high precision signal processing.
All of the INS/GNSS devices now embed a dual-frequency, quad constellations GNSS receiver for centimetric position and higher orientation accuracy.
SBG Systems manufactures miniature high-accuracy inertial navigation systems with inertial measurement unit (IMU) design, calibration and filtering. All improvements made in the high-end lines could naturally benefit the Ellipse miniature line.
The Ellipse series includes four models.
Ellipse-A is a motion sensor
Ellipse-E provides navigation with an external GNSS receiver
Ellipse-N is a single-antenna RTK GNSS/INS
Ellipse-D is a dual-antenna RTK GNSS/INS
With its new 64-bit architecture, the third-generation Ellipse series enables the use of high-precision algorithms and technology used in high-end inertial systems such as rejection filters and FIR filtering.
All Ellipse miniature INS are now RTK-enabled without extra cost, and output raw data for post-processing. All these features are made possible in a small, robust aluminum-enclosure box version, as well as in the 17-gram OEM version.
The 17-gram OEM version of the Ellipse-D can provide drones with high-end features. Its dual antennas gives UAVs robust instant heading for take-off. Dual antenna is achievable with a very short baseline, down to 50 centimeters. Integration is enabled with ROS and PX4 drivers, full API, and free phone and email technical support.
Ellipse-D
Ellipse-D is the smallest dual-frequency, dual-antenna RTK GNSS/INS device offered.
With its dual-frequency RTK GNSS receiver, the Ellipse-D provides a centimeter positioning. Dual frequency provides more robust heading and position computation than single-frequency receivers. It also allows high performance in attitude (0.05°) and in heading (0.2°).
With its dual-antenna capability, Ellipse-D provides precise heading in a few seconds, in all dynamic conditions, and even in challenging GNSS conditions. It is also immune to magnetic disturbances. Ellipse-D is a quad-constellation receiver, simultaneously using signals from GPS, GLONASS, BeiDou and Galileo to enable navigation in challenging conditions.
Designed with high quality industrial-grade components, Ellipse inertial sensors are highly tested and calibrated in dynamic and temperature for consistent, repeatable behavior in all conditions.
Aceinna was recognized as a partner-level supplier for 2019 and was inducted into the Supplier Hall of Fame in the John Deere Achieving Excellence Program.
Aceinna is a supplier of high-performance inertial sensor modules to John Deere’s operation in Fargo, North Dakota, for autonomous navigation and positioning.
Hall of Fame status is given after a supplier attains a Partner-level rating for five consecutive years. The Partner-level status is Deere & Company’s highest supplier rating.
According to John Deere, “Aceinna has earned this award in recognition of its dedication to providing products and service of outstanding quality as well as its commitment to continuous improvement.” Company employees accepted the recognition during formal ceremonies held on Jan. 29 in Davenport, Iowa.
Suppliers who participate in the Achieving Excellence program are evaluated annually in several key performance categories, including quality, cost management, delivery, technical support and wavelength, which is a measure of responsiveness.
John Deere Supply Management created the program in 1991 to provide a supplier evaluation and feedback process that promotes continuous improvement.
“We are honored to be recognized by John Deere for our fifth straight year for the technical merits of our IMU (inertial measurement unit) and our focus on product quality and on time delivery,” said John Newton, vice president for inertial products. “This John Deere award further adds to the industry recognition that Aceinna has earned over the last couple of years, positioning us as one of the industry leaders and innovators in the autonomous vehicles navigation and positioning space.”
Emcore is offering two inertial measurement units (IMUs) suitable for the defense market.
SDI500 Tactical Grade IMU. Emcore’s Systron Donner Inertial SDI500 is a high-performance MEMS-based IMU that demonstrates true tactical grade performance with 1°/hour gyro bias and 1-mg accelerometer bias stability with very low 0.02°/hr angle random walk. Its performance is based on Emcore’s quartz MEMS inertial sensor technology. The SDI500 is designed to achieve the demanding performance levels required in sophisticated systems applications. Packaged in a highly miniaturized, cylindrical configuration with a volume of 19 cubic inches, it is suitable for use by integrators and OEMs.
The SDI500 is a compact IMU constructed with SDI’s next generation quartz gyros, quartz accelerometers, and high-speed signal processing that achieves tactical grade performance. The SDI500 IMU is rated for rugged military environments.
EN-300 Precision Fiber Optic IMU/INS. The EN-300 inertial system is designed to be compatible in form, fit and function with a legacy equivalent, but with the higher accuracy and performance needed for GPS-denied navigation, precise targeting and line-of-sight stabilization.
It features navigational-grade performance with 0.04°/hr gyro bias and 0.1-mg accelerometer bias stability with ultra-low 0.007°/hr angle random walk.
Internal signal processing provides full stand-alone or aided navigation, and as an option can provide standard IMU delta velocity and delta theta.
New sensor provides easy-to-integrate, cost-effective, triple-redundant IMU hardware and software for guidance and navigation solutions in autonomous machines and vehicles
Photo: Aceinna
Aceinna has launched a new high-accuracy inertial measurement unit (IMU), the IMU383ZA. The sensor integrates triple-redundant, 3-axis micro-electromechanical system (MEMS) accelerometer and gyroscope sensors.
The IMU383ZA is an improved, pin-compatible version of Aceinna’s IMU381ZA. It offers high performance (1.3 deg/hr, 0.08 deg/root-hr) and a triple-redundant sensor architecture for ultra-high reliability.
The miniature module is factory-calibrated over the -40° C to +85° C industrial temperature range to provide consistent performance through extreme operating environments for a wide variety of applications.
Applications include automotive advanced driver-assistance systems (ADAS), autonomous systems, drones, robotics, agricultural, construction and other industrial machines.
The IMU383ZA provides a standard SPI bus for cost-effective board-to-board communications. Other features include advanced synchronization and a bootloader for field upgradeability.
Measuring 24 x 37 x 9.5 millimeters, the IMU383ZA integrates a triple-redundant architecture that — combined with the small, low-cost packaging — meet the challenging performance, reliability and cost requirements of the automotive market including the areas of autonomous vehicles, self-driving taxis/delivery vehicles, ADAS systems, electronic stability control and lane-keep assist applications.
The triple-redundant sensor architecture consists of three independent, 3-axis accelerometer and 3-axis gyros for excellent accuracy and reliability. By embedding a triple-redundant sensor array, the IMU383ZA uses Aceinna’s proprietary voting scheme to utilize only valid sensor data. Any defective sensor output or errant dataset will be ignored or de-rated in importance.
Higher rate, higher acceleration applications benefit from SWaP-C advantages of MEMS-based inertial systems.
Gladiator Technologies’ LandMark 007 inertial measurement unit (IMU) combines low noise, high range sensors and Velox high-speed output in a rugged IMU package measuring 0.7 inches square. With rate ranges up to 2000°/s and acceleration ranges as high as 200 g, the LandMark 007 IMU provides demanding, precision performance for a range of high dynamic, rugged applications.
Photo: Gladiator Technologies
All LandMark 007 IMUs feature Velox high-speed message timing to minimize digital message phase lag. They also include high-speed output data rates (up to 10 kHz) for measurement accuracy and flexibility.
These high-speed features are complemented by low-noise gyros with a gyro angle random walk (ARW) of <0.0035°/s/√Hz (0.15°/√hr) and low-noise accelerometers with a velocity random walk (VRW) of <6 mg/√Hz.
“The LandMark 007 IMU is uniquely designed to meet the industry’s need for a compact, rugged and high performance, cost-effective IMU. Extensive conditioning and testing ensure reliable, stable measurements for our customers with high dynamic applications,” said Eric Yates, Gladiator Technologies’ sales manager. “We are seeing strong interest in the LandMark 007 and LandMark 007X IMUs from applications which otherwise have been limited to highly specialized, and therefore expensive, IMU solutions.”
IMUs with less than or equal to 98 g linear acceleration range are designated as LandMark 007 IMUs. IMUs with greater than 98g linear acceleration range are designated as LandMark 007X IMUs. The LandMark 007 IMU is exported categorized as ECCN7A994 and the LandMark 007X is export categorized as ECCN7A103.
A LandMark 007 IMU development kit is available for set-up, configuration and data collection.
The RealSense camera uses two fisheye lenses and an IMU to construct location awareness. (Photo: Intel)
The Intel RealSense Tracking Camera T265, designed for positioning and maneuvering mobile robots and other portable systems, includes an inertial measurement unit (IMU) that enables developers to create solutions with advanced depth-sensing and tracking capabilities. Intel introduced the camera in Q1 of 2019. An earlier model, the D435i, also includes an IMU but is a depth camera, not a tracking camera.
As robots, drones and other autonomous mobile devices must — eventually — interact independently and intelligently with their environments, they must track their locations as they move, navigating unfamiliar spaces while discovering, monitoring and avoiding still and moving obstacles in real time.
Block diagram of camera components. (Image: Intel)
Moving toward that goal, the T265 includes two fisheye lens sensors, an IMU and an Intel Movidius Myriad 2 video processing unit (VPU), a system-on-chip component for image processing and computer vision at very high performance per watt.
Vision-based simultaneous localization and mapping (V‑SLAM) algorithms run directly on the VPU with very low latency. The T265 has demonstrated less than 1% closed-loop drift under intended use conditions. It also offers sub 6 ms latency between movement and reflection of movement in the pose.
The RealSense device measures 1 x 0.5 x 4 inches (108 mm x 24.5 mm x 12.5 mm), weighs around two ounces (55 g), and draws 1.5 watts to operate the entire system, including the cameras, IMU and VPU. Its spatial sensing and tracking capabilities are based on technology developed by RealityCap, acquired by Intel in 2015.
The camera performs inside-out tracking: it does not depend on external sensors to understand its environment. Tracking is based on information gathered from the two fisheye cameras, each with a 163-degree range of view (±5 degrees) and capturing images at 30 frames per second. The wide field of view from each sensor keeps points of reference visible to the system for a relatively long time, even if moving quickly.
Visual-Inertial Odometry. A key strength of visual-inertial odometry is that the sensors complement each other. The images from the camera are supplemented by data from the onboard IMU, which includes a gyroscope and accelerometer. The aggregated data from these sensors is fed into the SLAM algorithms.
The algorithm identifies sets of salient features in the environment, such as a corner of a room or object that can be recognized over time to infer the device’s changing position relative to those points.
The visual information prevents long-term drift from the inertial that degrades position accuracy. The IMU operates at a higher frequency than the cameras, allowing for quicker response and recognition by the algorithm to changes in the device’s position. A map of visual features and their positions is built up over time. In re-localization, the camera uses the features it has seen before to recognize when it has returned to a familiar place. The camera can locate its point of origin with an error margin of less than one percent.
Drone testing demonstrated that, in both cases, the tracking and position data generated by the peripheral was closely correlated with what was provided by GPS. This supports the viability of using it for navigation in areas where GPS is not available, such as under a bridge or inside an industrial structure.
New MTi 600-series with flexible interfacing options is backed by software development suite for easy integration into space-restricted host systems such as drones, Xsens said.
The MTi 600-series is a generation of inertial motion sensors which set a new standard in the market for their small size, industrial-grade performance and competitive pricing, Xsens added.
The new MTi 600-series of inertial sensors, supplied in a 31.5mm x 28.0mm x 13.0mm IP51-rated case, produce roll and pitch readings accurate to ±0.2 degrees. GNSS-assisted heading (yaw) measurements are accurate to ±1.0°. Among the products’ new features are a CAN bus interface and NMEA compatibility.
To achieve this performance, Xsens has applied numerous innovations in its latest sensor fusion algorithms, which optimize the output from new accelerometer, gyroscope and magnetometer components.
Photo: Xsens
The MTi 600-series modules are the first from Xsens to include an NMEA-compatible interface for GNSS receivers. This means that users can choose any GNSS receiver chip, module or system to work alongside the MTi-670, a GNSS/INS device that supplements the pitch, roll and yaw outputs available from other MTi 600-series products with global positioning information.
Xsens is demonstrating the high performance of the new modules at its stand 2627 at AUVSI Xponential, taking place in Chicago this week.
The MTi 600-series modules are available for sampling on request to Xsens. Volume production is expected to begin in July.