OxTS has shared this piece on OxTS.com.
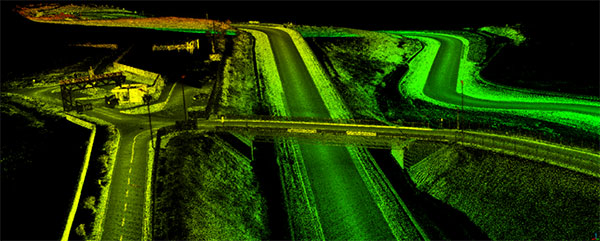
Mobile mapping is helping accelerate the progression of some of the most difficult engineering challenges on the planet, including those around autonomous driving and advanced surveying techniques, such as lidar.
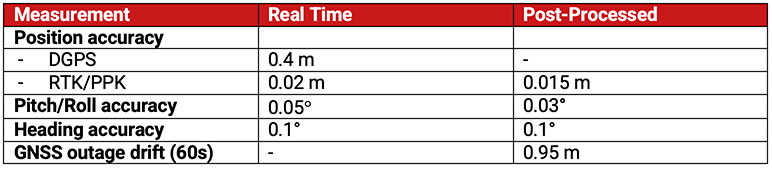
The complexity of those challenges means that the outputs from a mobile mapping inertial navigation system (INS) must be as accurate as possible. A high-performing INS will make the most of any available GNSS signals, with the aim of providing centimeter-level accuracy even in areas where GNSS performs poorly, for instance in urban canyons. It also offers important data on pitch, roll and heading, which maintains the integrity of survey data even as the vehicle moves across large areas.
With such a wide variety of INS devices on the market, it can be difficult to narrow down the best option. It is important to establish criteria that will aid in evaluating the different INS propositions out there for mobile mapping projects.
1) How tightly integrated are the inertial measurement unit (IMU) and GNSS data?
INS is an essential element in providing accurate location data in as many environments as possible. Therefore, it is important to know how effectively the data from the IMU supports the GNSS data. In technical terms, this means evaluating whether the sensors are tightly integrated at all, and if so, how well.
The reason GNSS struggles in urban canyons and under tree canopies is that it is unable to get the six satellite signals necessary for a real-time kinematic (RTK) lock. In this situation, the GNSS will give readings that may be incorrect, as it is essentially trying to solve an equation without having all the numbers.
A tightly integrated GNSS and INS data stream will select the most reliable signals and use those to determine the position of the vehicle. If the data streams are not tightly integrated, then the INS’ ability to counteract GNSS issues is limited. Without accurate positioning, data scans will lose accuracy and even become completely incoherent the longer the user scans — making them unreliable at best, and unusable at worst.
2) Trading off accuracy and cost
Although accuracy is vital in mobile mapping, some INS devices will provide data that is far more accurate than the given job requires. Because greater accuracy equals greater cost, users may be paying more than necessary.
With that being said, the scale of accuracy and cost is not linear. An INS half the price of the most expensive one on the market will not be half as accurate. Look at each offering carefully to see what it includes and decide what level of accuracy and features are vital to the task. Eliminating unnecessary levels of precision or additional software features that are not needed is an effective way to make some savings.
3) How rugged is the device?
Mobile mapping vehicles will likely be out in the dry, wet, hot, cold, mud and snow. These vehicles will almost certainly be used consistently for long periods of time. Thus, it is essential to know that none of these conditions will stop the INS from working at peak effectiveness. Look for the IP rating (IP65 is essential for being weatherproof and protecting against shocks and dust) and ask what the average lifespan of the product is.

4) Can the device be properly calibrated?
Any INS is only as good as its calibration. Without calibration, the sensors in any INS can become misaligned and therefore provide inaccurate readings. Talk to vendors about their calibration processes — do they work to a nationally recognized standard of calibration like ISO 17025? Do their calibrations account for variations in temperature or humidity?
It is also worth considering how often sensors need recalibration. Recalibration is a chargeable service from most vendors, meaning the more the device needs recalibrating, the more the user will have to pay. This could also lead to delays if the user must send units abroad to have them recalibrated.