A little more than a year ago, I became a part of a team of surveyors from across the country to offer testing and input on new technology and programing coming out of JAVAD GNSS. It has been a great honor to work along with Dr. Javad Ashjaee, the other surveyors and Javad’s staff at JAVAD GNSS. Why Javad chose me, I doubt that I will ever know. While I am proud to be a part of what Javad has dubbed “J-Team,” I have realized very quickly how little I know about GNSS. In this series of articles that I plan on putting together, I will chronicle my advances in GNSS and testing of JAVAD GNSS equipment.
As part of my testing, I have been using a JAVAD Triumph 2 base (with 4-watt external radio) and a TRIUMPH-LS rover. I had seen advertisements for this system for many months prior to becoming a member of the J-team. I was apprehensive at first with the difference in the appearance and learning the new software. However, it did not take long to realize how advanced this system, namely the TRIUMPH-LS, was.
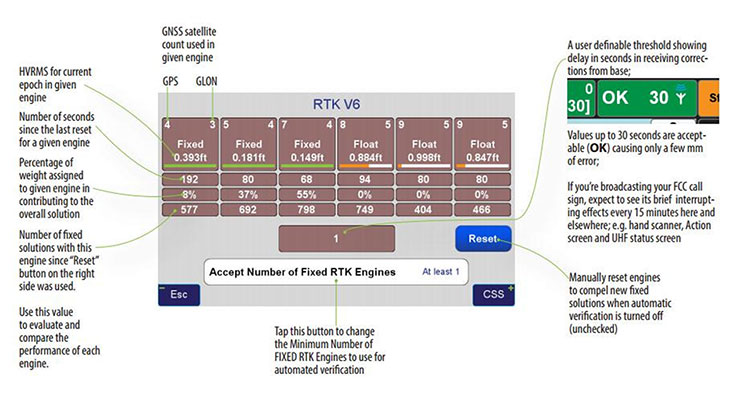
One key feature that I use to determine the quality of my shots is the V6 engines. The V6 engines that it uses to fix the ambiguities is unlike anything I have seen in any other software or receiver. The V6 engines are six separate RTK engines running simultaneously. Basically, this is like having six separate receivers in one.
When in heavy multipath area, I tend to stay fixated on this screen. Each engine can fix at different times. When another engine gets fixed, the resulting epochs are averaged between the two fixed engines and so on with any of the other engines. (See above image.)
This is only one of many technological advancements that Javad has included in his newest receivers. Please continue to follow my articles on other advancements and general surveying practice topics.
For more information on Javad’s J-Field software, the TRIUMPH-LS or other JAVAD GNSS solutions, please feel free to visit www.javad.com, email [email protected], or call 1-888-550-5301 or 1-408-770-1770.
Matthew D. Sibole is a Professional Land Surveyor (PLS) and a member of the JAVAD GNSS J-Team.
The TRIUMPH-LS and its field software, J-Field, have many revolutionary and innovative features compared to current GNSS systems. Here is a quick overview of its most salient features, making it an ideal unit for surveyors in the field and managing from the office.
The TRIUMPH-LS contains everything needed to function as a complete RTK rover in one small, compact, ergonomic and very portable unit:
an 864-channel GNSS receiver
a UHF or spread spectrum radio, a GSM modem
a Wi-Fi adapter
two internal cameras
a flashlight
a bright 800 x 480 pixel display.
Also included with the system is a collapsible monopod rover pole which allows the unit to be quickly folded up to fit in a very small space, perfect for carrying the system in the field or quickly stowing inside a vehicle. The lack of a data collector bracketed to the rover pole further increases its portability; the user can carry the system through the woods without having to worry about an extruding data collector getting caught in brush.
This system was ergonomically engineered; the head-height vertical display allows the user to operate the TRIUMPH-LS while standing in an upright position and looking forward. Users do not need to bend their neck to look down to view the display, as is traditionally done with a system having a data collector attached to a rover pole. This Triumph feature allows the system to be used without the neck soreness that can plague a user after working for extended periods of time.
The TRIUMPH-LS contains a built-in compass and tilt sensors. The compass enables quick and efficient stake-out of points. Forward/back and left/right offset readings relative to the face of the display show precisely where the stake-out point is located. This stakeout method reduces the time required for this task, compared to using traditional north/south and east/west offsets. The built-in tilt sensors can be used in lieu of having to plumb the rover pole. Taking advantage of the tilt sensors is also a “Lift & Tilt” mode that means topo points can be collected without pressing any buttons. In this mode, when the TRIUMPH-LS is plumbed, a point will automatically start collecting and can be programmed to collect a set number of epochs or to stop collection when the unit is tilted. After the point is collected, the user tilts the TRIUMPH-LS and walks to the next point, which will be collected when the unit is plumbed again.
Software. The field software, J-Field, is included at no extra charge with the system. There is no need for an external data collector or software. J-Field is constantly being improved, and updates will always be available free of charge with the system. The updates can be downloaded through Wi-Fi and are very simple to install, requiring only a couple of button presses to update the system.
J-Field features six separate, parallel RTK engines that all run simultaneously with separate assumptions. This allows for fixes to be obtained quicker than if only a single RTK engine were used. It has an advanced RTK verification system that can be used in difficult RTK environments where there is high multipath and/or tree canopy cover. This process will automatically reset the RTK engines and eliminate points from being collected with bad RTK fixes that often plague other systems in difficult locations.
With the built-in GSM modem, it is very easy to connect to real-time networks (RTNs). Alternately, it can also be connected through Wi-Fi using a mobile hotspot.
Full CAD features are in the process of being developed for use with the map screen. The ability to draw lines, polylines, circles and arcs will be supported. Using the planned move, copy, offset and rotate commands, much of the same CAD work that is traditionally done in the office will now be able to be completed in the field. This very beneficial feature can reduce the number of return visits to a project site.
J-Field has many customization features that can be used to increase productivity as your knowledge of the system grows. The stake and collect screens have eight white boxes that are easily customized to display a number of fields that the user may desire.
Together with free live technical support provided by practicing professional land surveyors via phone, email, message board and text messaging, JAVAD GNSS is pleased to announce the release of another innovative product, RAMS, Remote Assistance and Monitoring Services for J-Field software. J-Field is the field controller software developed for the TRIUMPH-LS GNSS receiver and the VICTOR-LS field controller. RAMS is currently available to all users of J-Field, JAVAD’s powerhouse software for survey data collection, stakeout, and computations.
With the J-Field enabled receiver/controller connected to the Internet (via internal GSM SIM card, Wi-Fi hotspot or Ethernet), users can make their receiver/controller accessible to JAVAD’s customer support team from anywhere in the world with three button presses. “It’s like having the support person looking over the user’s shoulder,” said Shawn Billings, a surveyor from Texas.
While the TRIUMPH-LS is connected to RAMS, the user and support person share control of the receiver, giving the support person the ability to make changes to settings on the receiver or train the user remotely. “It has changed the way support is conducted, making us more efficient at determining issues and more effective in training users,” said Billings. The connection is password-protected to ensure that only those intended have remote access to the receiver.
Beyond technical support, RAMS server access is available to the user community as well. This offers the ability for project managers to remotely supervise crew efforts in the field. Because operational control of the TRIUMPH-LS/VICTOR-LS is shared between the server user and the field user, the server user (project manager) could perform the more complex operations of land surveying, such as COGO calculations and localizations, as necessary, and then allow the field user (crew member) to continue the more routine tasks of data collection.
Should the task be simpler to accomplish with office software, RAMS allows file transfer directly from the LS to the server user’s own computer and vice versa, thus enabling the project manager to easily export points, linework (dwg, dxf, shape), vectors, photos and other project-related data from the LS to his desktop. From there, he can manipulate the data in his desktop application and then copy files, with newly computed coordinates or linework, back to the LS for the crew to work with in the field. In this way, RAMS uniquely supports the obligation surveyors have to exert responsible charge over their field crews.
The full receiver control, the access to receiver files, the robust RTK features of the TRIUMPH-LS and the fully customizable collection settings in J-Field make site monitoring possible as well.
RAMS server can be accessed with almost any device with an Internet browser and Internet access. “I’ve used RAMS server to assist customers from my desktop computer, laptop, android tablet and even my cell phone,” Billings added. “Using JAVAD’s RAMS server requires no installation of software on the remote device, only an Internet connection and web browser.”
For those wanting to operate RAMS on their own server, the RAMS Server application is available from JAVAD GNSS. An Android version of RAMS Server is also available, allowing users to connect an Android device directly to the TRIUMPH-LS without the need for an Internet connection. RAMS for Android creates a local network between the Android device and the LS and allows a field user to see and manipulate J-Field with the Android device should it be necessary to work with the LS beyond the reach or view of the user.
For more information on RAMS, J-Field, TRIUMPH-LS, VICTOR-LS and other JAVAD GNSS solutions, visit www.javad.com, email [email protected] or call 408-770-1770.
The GPS World Galileo Product Showcase, from the April 2015 issue, features the latest products from seven top companies.
GPS/GLONASS/Galileo Receiver
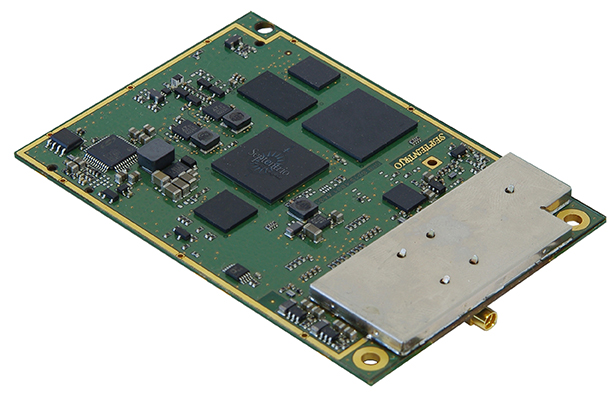
Septentrio AsteRx3 Photo: Septentrio
The AsteRx3 is a multi-frequency GPS/GLONASS/Galileo receiver is designed for demanding industrial applications. AsteRx3 features simultaneous high-quality GPS, GLONASS and Galileo tracking and a range of innovative features, such as the patented Galileo AltBOC tracking, the advanced multipath mitigation algorithm APME, LOCK+ tracking for exceptional tracking stability under high vibration conditions, RTK+ for extended RTK baselines and faster initialization, and AIM+, Septentrio’s Advanced Interference Mitigation technology, offering centimeter-level measurement quality for high-precision positioning, even in challenging environments.
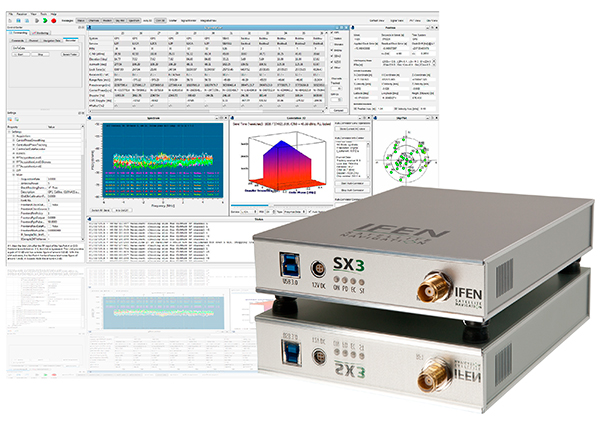
The IFEN SX3 multi-GNSS software receiver Photo: IFEN
IFEN’s SX3 multi-GNSS software receiver tracks all known GNSS signals in view, including Galileo signals, in real time on a standard laptop now and in the foreseeable future (up to 1,000 channels in parallel on a core i7). The included RF front end offers four RF frequency paths with 50-MHz bandwidth each, covering the entire GNSS L-band spectrum. The USB 3.0 interface enables high-speed data transfer with up to 8-bit quantization. An optional dual RF input front end can be used for attitude determination, reflectometry and other applications requiring the synchronized input from two antennas. An optional built-in shock and vibration robust OCXO reference oscillator (MIL-STD 202G) is available, which replaces the standard high-quality TCXO normally used.
The SX3 software lets users configure the data processing, including changing loop bandwidths, integration times and the main processing rate, and choosing between different correlation types. The software includes a multi-correlator providing a two-dimensional (code and Doppler) correlation function visualization in real-time. The receiver comes with several powerful processing algorithms like vector tracking, to improve the tracking of weak signals in degraded environments.
The NEO-M8L Automotive Dead Reckoning (ADR) module by u-blox has integrated motion, direction and elevation sensors. The module integrates gyro and accelerometer with u blox’ GNSS platform M8 to achieve high indoor/outdoor positioning performance for road vehicle and high-accuracy navigation applications.
The module is able to track all visible GNSS satellites including GPS, GLONASS, BeiDou, QZSS and all SBAS, with Galileo to be supported in a future firmware version. Concurrent reception of two GNSS systems is supported. The NEO-M8L module can output a position up to 20 times per second.
In addition to accessing the integrated module’s gyro and accelerometer data, accident reconstruction systems can provide the location of an accident to facilitate insurance claims even if a collision occurs in a tunnel or park house. High-end navigation devices are able to guide drivers through tunnels of several kilometers because of the accuracy of u-blox’ ADR system. Stolen vehicles can be located instantly due to continuous monitoring of sensor data and storage of location in non-volatile memory.
The NovAtel FlexPak6D enclosed GNSS receiver is a flexible dual-antenna solution for application developers seeking a high-precision heading-capable positioning engine for space-constrained applications.
Designed for efficient and rapid integration, the compact receiver tracks Galileo as well as GPS, GLONASS and BeiDou. Antenna placement is flexible: the antenna baseline can be set according to space available on a vehicle and heading accuracy required. The modular OEM6 firmware enables users to configure the receiver for unique application needs. Scalable for sub-meter to centimeter-level positioning, the FlexPak6D delivers NovAtel’s ALIGN precision heading and relative heading firmware, as well as its GLIDE firmware for smooth decimeter-level pass-to-pass accuracy and RAIM for increased GNSS pseudorange integrity.
The GNSS simulator in the vector signal generator R&S SMBV100A Photo: R&S
The GNSS simulator in the vector signal generator R&S SMBV100A is designed for development, verification and production of GNSS chipsets, modules and receivers. The simulator supports all possible scenarios, from simple setups with individual, static satellites up to flexible scenarios generated in real time with up to 24 dynamic Galileo, GPS, GLONASS, BeiDou and QZSS satellites. The simulator also supports Assisted GNSS (A-GNSS) test scenarios, including generation of assistance data for Galileo.
The simulator offers real-time simulation of realistic constellations with up to 24 satellites and unlimited simulation time. Flexible scenario generation includes moving scenarios, dynamic power control and atmospheric modeling. Users can configure realistic user environments, including obscuration and multipath, antenna characteristics and vehicle attitude.
The all-in-one TRIUMPH-LS by JAVAD GNSS combines a high-performance 864-channel GNSS receiver, all-frequency GNSS antenna, and a modern featured handheld. The 864 all-in-view channels include Galileo E1/E5A/E5B, GPS L1/L2/L5, GLONASS L1/L2/L3, QZSS L1/L2/L5, BeiDou B1/B2 and SBAS L1/L5.
The TRIUMPH-LS offers GUIDE data collection, Visual Stake-out (VSO), navigation, six parallel RTK engines, more than 3,000 coordinate conversions, advanced CoGo features, and rich attribute tagging on a high-resolution, bright, 800 x 460 bright display. Two 3-megapixel cameras enable recording of images along with GNSS data.
With VSO, the virtual location of a point to be staked can be seen by a “flag” shown on the Triumph-VS camera image. This visual aid helps users navigate quickly to a point and makes stakeout jobs fast and easy. VSO can be used as a convenient way to get close to a target point before switching to the regular stakeout mode to perform precise measurements.
More than 100 channels are dedicated to continuous interference monitoring. The Triumph-LS monitors and reports interference graphically and numerically with patent-pending interference protection. Interference awareness allows safe GNSS operation in a city, airport and military environment.
The unit can serve as base or rover. It has a GSM modem, UHF transmit and receive, and an internal high-performance geodetic antenna.
The TRIUMPH-LS automatically updates all firmware when connected to a Wi-Fi Internet connection.
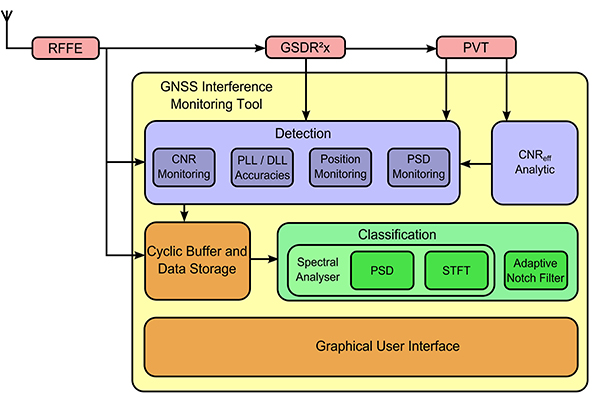
TeleOrbit’s software-defined radio receiver and GNSS interference monitoring tool receives and processes all available Galileo signals. Signals that are not yet transmitted and interference sources can be simulated and processed within the software tool.
Within a software-defined radio framework, the analog-to-digital converter is moved as close as possible to the antenna to perform most of the signal processing in software. This leads to adaptable solutions with lower hardware costs that can be easily extended to new signals and systems with only a software update.
The GNSS Software Defined Radio Receiver (GSDR2X) developed by TeleOrbit’s sister company TeleConsult Austria can track most readily available signals from Galileo, GPS and SBAS. By utilizing input from TeleOrbit’s GNSS multi-system performance simulation environment (GIPSIE), even signals not yet transmitted by satellites can be tracked and processed by the GSDR2X. Furthermore, input data can be read from various radio frequency front-ends, either directly or from file.
The modular GSDR2X framework enables new capabilities, such as the GNSS Interference Monitoring Tool (GIMT), which enables the GSDR2X to detect and classify interfering and jamming signals (see figure).
The root cause of the anomaly that sent two Galileo satellites into the wrong orbit on August 22 was a shortcoming in the system thermal analysis performed during stage design, and not an operator error during stage assembly, according to findings by an independent inquiry board.
The independent inquiry board was created by Arianespace, in conjunction with the European Space Agency and the European Commission. Its conclusions draw on data supplied by Russian partners in the program, and are consistent with the final conclusions of the inquiry board appointed by the Russian space agency Roscosmos.
The anomaly occurred during the flight of the launcher’s fourth stage, Fregat, designed and produced by NPO Lavochkin. It occurred about 35 minutes after liftoff, at the beginning of the ballistic phase preceding the second ignition of this stage.
The board’s conclusions confirm that the first part of the mission proceeded nominally, which means that the three-stage Soyuz launcher was not at fault. The inquiry board also eliminated the hypothesis that the anomaly could have been caused by the abnormal behavior of the Galileo satellites.
The scenario that led to an anomaly in the orbital injection of the satellites was precisely reconstructed, as follows:
The orbital error resulted from an error in the thrust orientation of the main engine on the Fregat stage during its second powered phase.
This orientation error was the result of the loss of inertial reference for the stage.
This loss occurred when the stage’s inertial system operated outside its authorized operating envelope, an excursion that was caused by the failure of two of Fregat’s attitude-control thrusters during the preceding ballistic phase.
This failure was due to a temporary interruption of the joint hydrazine propellant supply to these thrusters. The interruption in the flow was caused by freezing of the hydrazine.
The freezing resulted from the proximity of hydrazine and cold helium feed lines, these lines being connected by the same support structure, which acted as a thermal bridge.
Ambiguities in the design documents allowed the installation of this type of thermal “bridge” between the two lines. In fact, such bridges have also been seen on other Fregat stages now under production at NPO Lavochkin.
The design ambiguity is the result of not taking into account the relevant thermal transfers during the thermal analyses of the stage system design.
The system thermal analyses have been reexamined in depth to identify all areas concerned by this issue. The board has chosen these corrective actions for the return to flight.
Revamp of the system thermal analysis.
Associated corrections in the design documents.
Modification of the documents for the manufacture, assembly, integration, and inspection procedures of the supply lines.
Arianespace said these measures can immediately be applied by NPO Lavochkin to the stages already produced, meaning that the Soyuz launcher could be available for its next mission from the Guiana Space Center in December.
“We are looking at the resumption of Soyuz launches from the Guiana Space Center, as early as December 2014,” stated the Arianespace CEO. “The resolution of this anomaly will enable a consolidation of the reliability of Fregat, which had experienced 45 consecutive successes until this mission.”
Galileo Service Controls Handed to GNSS Agency
Full Operability Set for 2020
The European GNSS Agency (GSA) and the European Commission have concluded an agreement that delegates a range of exploitation tasks for Galileo to the GSA, providing a framework and budget for the development of services and operations through 2021.
The signing of the Galileo Exploitation Delegation Agreement serves as an initial step towards the full Galileo Exploitation Phase. According to the governance structure set out in the agreement, the European Commission is responsible for the overall programme supervision, the European Space Agency (ESA) is entrusted with the deployment phase, while the GSA is responsible for the exploitation phase. The GSA’s responsibilities include:
provision and marketing of the services
management, maintenance, continuous improvement, evolution and protection of the space and ground infrastructure
research and development of receiver platforms with innovative features in different application domains
development of future generations of the system
cooperation with other GNSS
all other required activities to ensure the development and smooth running of the system.
“With Galileo, we aim to provide a tangible service to European citizens, and this Delegation Agreement ensures we have the tools and funding necessary to achieve this,” said GSA Executive Director Carlo des Dorides.
Full operability of Galileo is now scheduled for 2020, a slight revision of the previous 2018 projection.
The agreement specifically sets the actions to be implemented, the amount of funding provided, and the conditions for the overall management. The maximum current EU contribution amounts to EUR 490 million, which will cover procurement and grant activities, including the GSA-ESA working arrangements and a programme management reserve, along with related research and development activities. The financing of the full exploitation phase will be confirmed during a mid-term review before the end of 2016.
India Launches Third Satellite and ICD
India successfully launched IRNSS-1C, the third satellite in the Indian Regional Navigation Satellite System (IRNSS), on October 16. The satellite was injected to an elliptical orbit of 282.56 x 20,670 kilometers, very close to its intended final geostationary orbit at 83 degrees East longitude.
IRNSS-1C is the third of the seven satellites constituting the space segment of the Indian Regional Navigation Satellite System. Tthe first two were launched in July 2013 and April of this year. Both are functioning satisfactorily from their designated geosynchronous orbital positions.
IRNSS is an independent regional navigation satellite system designed to provide position information in the Indian region and 1,500 kilometers around the Indian mainland. IRNSS will provide two types of services: Standard Positioning Services (SPS), provided to all users, and Restricted Services (RS), provided to authorized users. Ground stations have been established in at least 15 locations across India.
The next satellite of the constellation, IRNSS-1D, is scheduled to be launched in the coming months. The full IRNSS constellation of seven satellites is planned to be completed by 2015.
IRNSS ICD Released. In late September, the Indian Space Research Organization (ISRO) released version 1 of the IRNSS Signal in Space Interface Control Document (ICD) for the Standard Positioning Service.
The document provides information on the signals and structures of the IRNSS system, including signal modulations, frequency bands, received power levels, the data structures and their interpretations, and user algorithms.
Registration is required for ICD download access at a new IRNSS website.
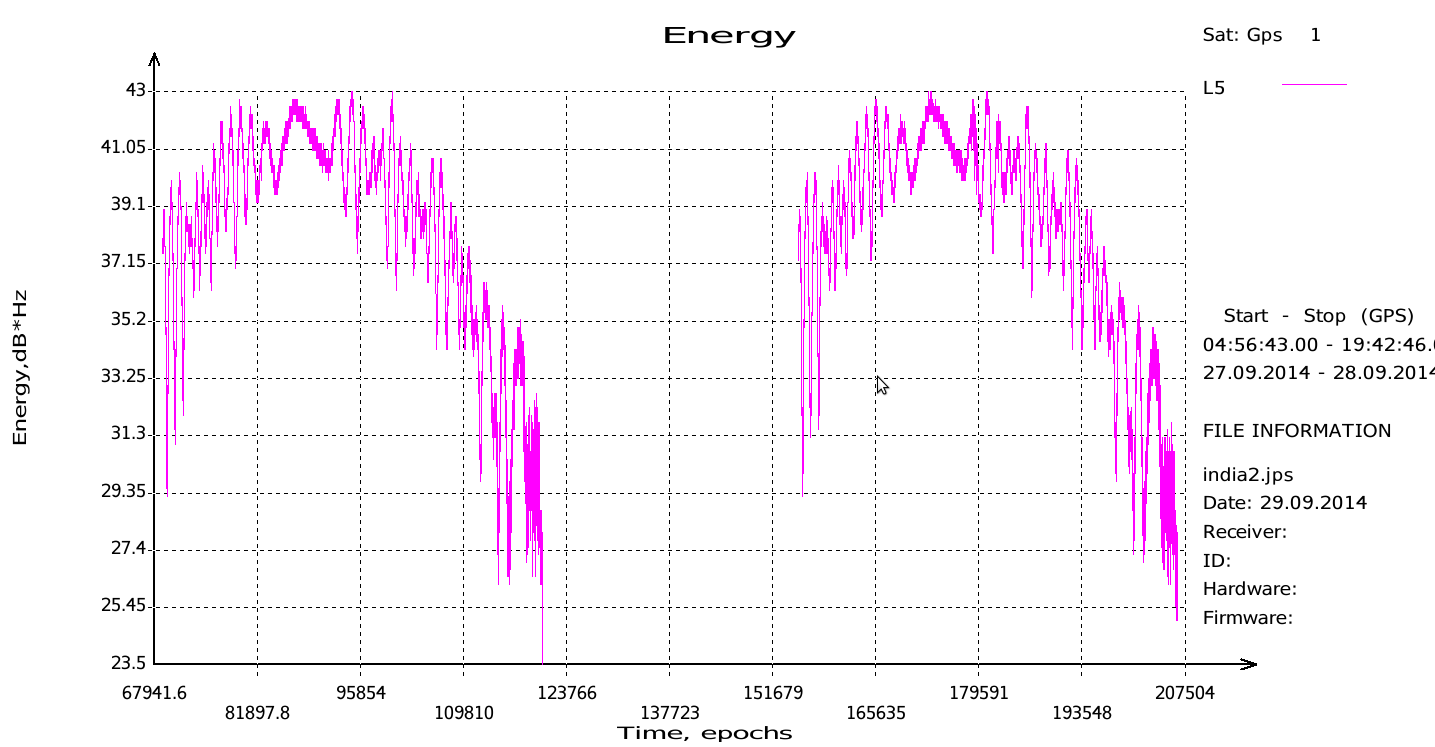
JAVAD Tracks Signal. JAVAD GNSS published a chart showing that it has tracked the IRNSS L5 signal.
Shortly after ISRO released its IRNSS Signal in Space Interface Control Document (ICD), JAVAD GNSS tracked the L5 BPSK signal from both 1A and 1B satellites. Ability to track IRNSS L5 will be added to all JAVAD L5-capable receivers in the near future, the company said.
SNR of two passes of 1A satellite (IGSO) over Moscow.
Let’s All Be GPS III for Halloween
As this magazine goes to press on October 23, the U.S. Air Force is set to launch the eighth GPS IIF satellite from Cape Canaveral Air Force Station on Wednesday, October 29. An 18-minute launch window will open at 1:21 p.m. U.S. Eastern time. If all goes well, the satellite will be accomplishing its early-orbit checkouts and beginning maneuvers towards its final orbital plane as U.S. children make their costumed Halloween rounds, collecting candy. Other Western countries celebrate All Hallows’ Eve followed by All Saints’ Day on November 1.
Javad Ashjaee, president and CEO of JAVAD GNSS, and GPS World Editor-in-Chief Alan Cameron discuss the design of the TRIUMPH-F1 while at InterGeo 2014, held October 7-9 in Berlin.
JAVAD GNSS has published a chart showing that it has tracked the IRNSS (Indian Regional Navigational Satellite System) L5 signal.
Shortly after the Indian Space Research Organization (ISRO) released its IRNSS Signal in Space Interface Control Document (ICD), JAVAD GNSS was able to track the L5 BPSK signal from both 1A and 1B satellites. Ability to track IRNSS L5 will be added to all JAVAD L5-capable receivers in the near future, the company said.
SNR of two passes of 1A satellite (IGSO) over Moscow.
JAVAD GNSS is introducing its new unmanned aerial vehicle with the dramatic flourish of a video showing the UAV in flight, accompanied by the “Also Sprach Zarathustra” theme from 2001: A Space Odyssey.
The TRIUMPH-F1 unmanned aerial vehicle is based on the JAVAD GNSS TRIUMPH-1. TRIUMPH-1 is the company’s field-tested high-precision geodetic GNSS receiver with 864 channels to track all current and future GNSS signals.
When used on the ground, the TRIUMPH-F1 can function as a TRIUMPH-1 base or rover. The four motor arms (for eight motors) are detachable. There are four screw inserts in the bottom to attach the TRIUMPH-F1 to a pole mount for field use.
“Use any opportunity to create friendship and peace,” urged Javad Ashjaee, president and CEO of JAVAD GNSS, in a May 23 conversation with journalists. He decried the recent controversy about monitoring stations on both U.S. and Russian soil, saying it was based in misinformation and misinterpretations, inflated by a political crisis in a completely different area. “This [GNSS] is a good thing, that for 25 years kept us together. And if you see, there are lots of high-level meetings between U.S. and Russian officials, they are all very friendly meetings.”
A transcription of his remarks appears here, below the following main points and clarifications that he wished to make:
• Earlier this year, Russia sought GLONASS monitoring stations in the United States, not for uploading any data, but for monitoring GLONASS satellites to provide more accurate orbit and clock information, for the free and open benefit of all users.
• The Russian general who threatened to close down monitoring stations on Russian soil that contribute data to the International GNSS Service was immediately and roundly criticized by Russian scientists and surveyors. The general subsequently retracted his remarks.
• The 11-hour GLONASS outage on April 1 was not due to a wait for all satellites to pass over ground control stations on Russian soil to receive a fresh upload of data. GLONASS has the capability (as does GPS) to make such updates via inter-satellite communication. The delay was caused by the time it took to find the bug in the erroneous software that had been uploaded, and to correct it.
• Ashjaee also noted that “No military activity requires millimeter accuracy. It is only scientific applications for humanitarian tasks that require millimeter accuracy. Needing more monitoring stations, such as the IGS stations, is only for that purpose.”
The Background
Javad Ashjaee, founder and CEO of JAVAD GNSS, contacted GPS World on May 20 with a message: “I had a discussion today with the head of the GLONASS program in RosKosmos regarding the tracking sites that they wanted to establish in the United States, and the subsequent events. What has been published in most U.S. media is far from the truth. It is time that we contribute to defusing problems rather than putting more fuel on the fire. The world has enough problems already.”
The Full Statement
This is the story of GPS/GLONASS. It also gives some insight as to how things get out of control, and much, much bigger issues like war and things like Ukraine get created. It is just a tiny, simple example.
When I first heard the issue of GLONASS about 25 years ago and was invited by RosKosmos to Moscow, I didn’t think of Communism or anything political, I thought “30 satellites free, that they’re willing to give to the world, free of charge.” That’s how I got excited. Recently, GPS World published a wonderful history of the growing development of GLONASS and GPS.
What bothers me now is some negative reactions that I see towards GLONASS. It seems that when they see something negative about GLONASS, they enjoy it. In the reports, read between the lines. When there is a problem with GLONASS, you sense some sort of happiness. There is something of “them versus us.”
There was the question, “Why do they need things in our country? Don’t they have them in their country?”
When people don’t know each other, they fear and they create fear.
One thing we should look at: GLONASS is good for all of us. As President Reagan offered GPS free of charge to the world, and everybody applauded him — the Russians have done the same thing. In Oklahoma, California, everywhere, farmers and surveyors are using GLONASS free of charge, the same as GPS. And GLONASS has been better, and I emphasize, it has been better because they didn’t encrypt their code so that we had to go behind and decipher and decrypt and all the trouble that we went to during the past 20 years, because GPS didn’t think that we need carrier phase.
GLONASS is good for America, for the world, as is GPS. If there is a problem with GLONASS, we must be unhappy, as we are unhappy when there is a problem with GPS. And if we can help GLONASS, we must help GLONASS. There is nothing to fear about war, nobody needs [millimeter-level] accuracy of GPS or GLONASS if there is a war between super-powers.
We should all want GLONASS to give precise information. We care about centimeter-level accuracy, the military doesn’t. Five-meter accuracy is good enough for them. To improve the precise-orbit information of GLONASS is the concern of surveyors and those that need precision GPS.
Now, what’s the issue? GLONASS needs 50 reference stations all around the world to monitor the orbits of its satellites, to make the precise-orbit information [furnished to users] better. Not to upload information to the satellites. For this, one station is enough, for both GPS and GLONASS, because both have inter-satellite connections that can do this.
There was speculation in early April that it took GLONASS 11 hours to correct a software bug because it took that long for all the satellites to pass over a control station on Russian soil. This was not the case, I have learned from conversations with their engineers and with the head person responsible for all of this. One engineer made a mistake and uploaded the wrong software. Until they could find it and debug it — and it took them 11 hours to do so — they could not upload correct software to the satellites.
What they are asking for from the United States is not an upload station. They need as many [globally-distributed] monitoring stations as possible; 50 is good.
The International GNSS Service (IGS) has 300. To have a good orbit determination for scientific work, to get to the depth of centimeter- or millimeter-level accuracy, the objectives of IGS reports is to have 200 or 300 monitoring stations. For military work, three or four is enough.
Russia already has more than 50 monitoring stations. They use IGS stations. They didn’t need to ask for anything. Even [data from] the units we have in our San Jose office is available to everybody.
So I asked the GLONASS people, “Why did you ask? You have [access to more than] 200 monitoring stations!”
This was the issue: it was only political. When RosKosmos made internal presentations in Russia to their [government and military] decision-makers, they were asked, “OK, these stations are controlled by who?” By the IGS, they answered. They were told “You must have stations under Russian control.”
I explained to them that IGS stations, for them, are more convenient and more secure. If President Obama told the IGS, told Stanford University and 200 other universities, to turn off their IGS stations, there would be a lot of disagreement! President Obama could turn off Russian stations on U.S. soil. I told them, IGS stations are more convenient and more secure for you than your own stations, and they understood. They are not pushing for it, they said those officials on the top, they know nothing. They were asking that we must have five stations under our control.
If you understand this: that the issue was [Russian internal] political, that they don’t need anything. They already get the precise orbit data from IGS stations.
Now, the second part or episode of this problem: when a Russian general heard that the United States said “No” to the request for Russian-controlled monitoring stations on U.S. soil, he said “Oh, now they don’t let us do this? We will turn off their stations in Russia.” All surveyors and all scientists in Russia jumped at that general, and he retracted what he had said.
But people who didn’t understand this [that IGS-participating stations in Russia have nothing to do with controlling GPS satellites or supplying GPS data to users], they put their own statements in the press, they added fuel to the fire.
The Q&A
When asked how surveyors in Oklahoma could help GLONASS, as he had urged, Ashjaee replied “They can write to their senators and ask, why didn’t you let monitoring stations be in the heart of Oklahoma too?”
Afterthought
Once the first version of this online story was posted, Javad Ashjaee sent in this further comment:
“Part of my admiration for the GLONASS team is that they managed to pull this project off amidst their worst economical, social, and political times. Compare their situation with GPS that had a huge budget (and still ran way over budget) and with Galileo that took several rich countries to put the budgets and technology together. GLONASS also offered this free and unrestricted service to the world without making any political gestures. No encryption of codes and no selective availability either.
“There is an abundance of opportunities to create hostility, and there are enough people to promote it. Situations like this are rare that we can grasp the opportunity to promote friendship.”
On Thursday, March 20, CEO Javad Ashjaee of JAVAD GNSS will conduct a free webinar on the current state-of-the art in high-precision GNSS technology: Where is high-precision GNSS today? Where is it headed?
Further topics include new products and solutions from JAVAD GNSS, U.S. sales and customer-support news, and the offer of a two-week free trial for professional land surveyors of the JAVAD GNSS’s newest equipment, the TRIUMPH-LS and TRIUMPH-2. There will also be a question and comment session with one of the industry’s most accessible CEOs. Register here.
The 75-minute free webinar starts at 1 p.m. Eastern U.S. Time, 10 a.m. Pacific.
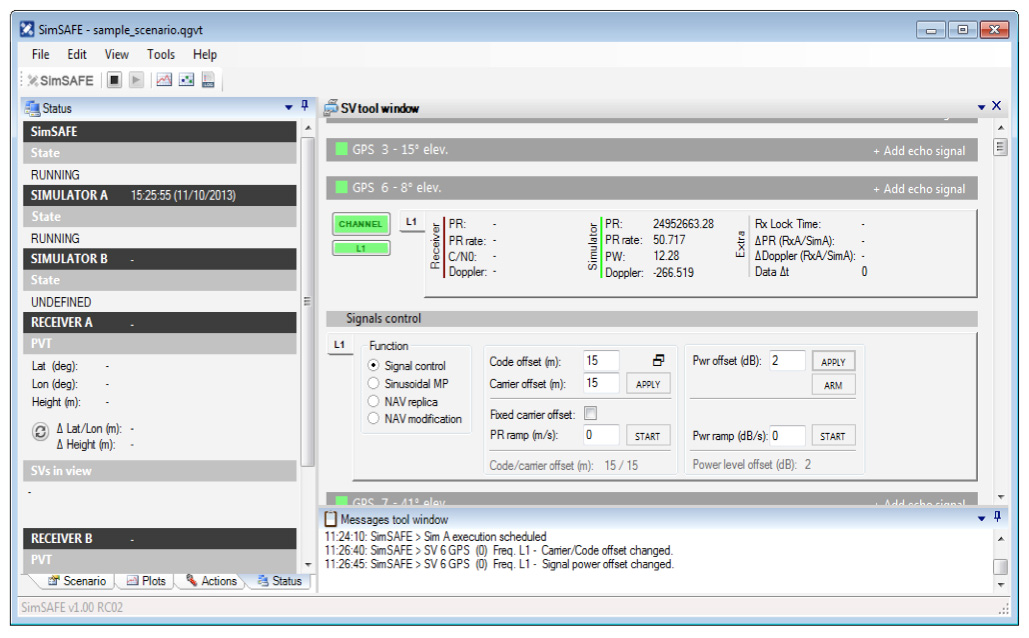
Spirent Communications now offers SimSAFE, a software solution that simulates legitimate GNSS constellations along with spoofed or hoax signals to evaluate receiver resilience and help develop counter measures.
Hoax or spoofing attacks work by mimicking genuine GNSS signals, which mislead GNSS receivers. The military and critical infrastructure — such as wireless networks, banking, and utilities — are especially interested in being able to detect and reject spoofing attacks.
“GNSS signal vulnerability is becoming a significant issue,” said John Pottle, marketing director of Spirent’s Positioning Division. “The industry is beginning to talk more about vulnerability and how we actually think about categorizing the threat — what approaches are there to evaluate performance in the presence of interference signals? If you’re a developer, what approaches are there to clean up your performance? You’ll see us at Spirent being quite a bit more vocal about these areas in the coming months.”
SimSAFE was developed in conjunction with Qascom, a small organization of half a dozen GNSS signal security and authentication experts headed by Oscar Pozzobon, who served as the chief solutions architect for SimSAFE. Pozzobon contributed his knowledge of GNSS security and vulnerabilities, which were then integrated into the SimSAFE system.
SimSAFE provides a means of emulating a spoofing attack, and then monitoring a receiver under attack to evaluate mitigation strategies and countermeasures.
“SimSAFE really gets into details on how a receiver reacts in the presence of the hoax signals,” Pottle said. “By really understanding that, really getting into how is the receiver is acting and reacting, you can understand better how your receiver is likely to behave, and tune it up.”
The SimSAFE laboratory-based test solution is fully controllable, so that users can evaluate a receiver’s response to a wide range of spoofing attacks. As Pottle put it, when fed both authentic and spoofed signals, “What’s the receiver going to see? It’s going to see the authentic signals, it’s going to see a couple of spoofed signals. And you can play around with the spoofed signals — that’s the controllable bit. While this is happening, the detector module within SimSAFE monitors and reports the receiver’s response to the attacks. At its most simple, that’s the power of SimSAFE.”
SimSAFE is aimed not only at receiver developers, a core audience of Spirent’s, but at anyone trying to build a system that may be subject to intentional interference, such as in the military or critical infrastructure. “Those people are starting to ask questions about what should I be worried about? What kind of an attack might I be open to? How can I be sure, if I’ve got a choice of three or four receivers, that I’m going to choose one that meets my needs in terms of resilience to intentional interference?” Pottle said. “Our belief is that SimSAFE will allow people to evaluate different receivers and strategies for mitigating spoofing attacks, and therefore help them to build the right level of resilience in their systems.”
SimSAFE is available in two variants. SimSAFE Simulated uses the simulator for all signals, both satellite and spoofed, using one or more channels for the spoofed signal.
Instead of a simulator, SimSAFE Live pulls authentic signals from sky with an antenna, so the user has the full power of the simulator to generate a much broader range of spoofing attacks. “The clever bit is aligning the spoofed signal with the real signal, getting the timing and frequency synced up,” Pottle said.
Spirent is also working on other technologies to mitigate spoofing, including work with interference signals from ground-based transmitters, adaptive antenna lab-based tests, and integration with inertial sensors, such as in military jets.