ABI Research’s competitive analysis evaluates GNSS IC vendors across innovation and implementation parameters
The GNSS market is slowly shifting in new directions, according to ABI Research. While the smartphone market continues to grow, new opportunities are also emerging in automotive, insurance, wearables, unmanned aerial vehicles (UAVs) and the Internet of Things (IoT).
Overall, the GNSS market is forecast to continue to grow strongly, with ubiquitous location and market-specific IC design as key differentiators.
In its latest competitive analysis of GNSS IC vendors, ABI Research evaluates a variety of innovation and implementation parameters to determine emerging competitive threats and technologies, the companies best positioned for success and those in danger of losing out.
Unchanged for the past three years, the market’s two top IC vendors remain Qualcomm and Broadcom, soon to be acquired by Avago. Both companies continually illustrate the ability to lead the way on cutting-edge innovation, which in turn drives their dominant market-share position, ABI Research said.
Beyond just GNSS, both companies also offer comprehensive location technology platforms in HULA (Broadcom) and Izat (Qualcomm), which will enable smartphone OEMs to begin offering ubiquitous location in 2016. Qualcomm’s work on LED/VLC and LTE Direct illustrates the gap that now exists between it and pure-play GNSS IC vendors.
u-blox, a well-established GNSS IC company, has shown continuous growth each year by implementing new technologies and making acquisitions, culminating in its first ever third place ranking, ABI Research said. The company continues to lead the way in its core markets, while also expanding into the emerging IoT space.
“The big surprise this year has been MediaTek dropping to fourth place,” said Patrick Connolly, principal analyst at ABI Research. “This is primarily due to a lack of new GNSS or indoor location products. However, this did not affect its IC market share, or its ability to win an important GNSS IC win with Fitbit in wearables. MediaTek has a history of delivering when its customers need new innovation. As a result, ABI Research expects new product announcements from the company in 2016, especially around indoor location.”
Ranking fifth, STMicroelectronics is seeing customers migrate to its TESEO III platform. Its modular, high-performance approach should also enable it to move beyond its traditional markets of automotive and recreational/fitness, especially as it has begun to leverage the company’s expertise in sensor fusion.
As new opportunities for GNSS continue to develop in markets such as wearables, IoT, personal tracking and UAVs, there will also be a number of new or emerging companies looking to claim a share in the stakes. Analysis findings point to the Chinese regional market as one such area that has potential to demonstrate strong growth trends in future years.
“There’s big opportunity for emerging Chinese start-ups, such as CEC Huada, to meet new, indigenous, market demand over the next 10 years, while also working their way toward becoming major international competitors,” concluded Connolly. “Additionally, Galileo Satellite Navigation, an emerging company focused in software GPS, is reporting impressive results in trials. As consumer electronics start supporting software GPS, it will be interesting to watch whether or not it can achieve volume shipments in 2016.”
These findings are part of ABI Research’s Location Devices Service, which includes research reports, market data, insights and competitive assessments.
STMicroelectronics is bringing next-generation satellite navigation to today’s drivers with the launch of enhanced, always-available, always-accurate 3D positioning on its TESEO III automotive-navigation integrated circuits (ICs).
The new TESEO DRAW firmware for ST’s multi-constellation positioning chips enables navigation devices to provide continuous, accurate location and turn-by-turn instructions even when satellite signals are poor or unavailable, such as in tunnels, covered car parks, or multi-level highways. TESEO DRAW also enhances performance in built-up areas, such as in urban canyons, where conventional navigation systems can lose accuracy.
TESEO DRAW merges the satellite information with data from vehicle sensors such as the gyroscope, accelerometer and wheel-speed sensors, to calculate location accurately in three dimensions including elevation. If the satellite signal is poor, TESEO DRAW compensates for the loss of accuracy, and if the signal becomes unavailable, navigation continues uninterrupted based on calculated location (dead reckoning). Road tests carried out by ST in difficult under-cover and urban environments have demonstrated continuous tracking from entry to exit in complex multi-level car parks, and at street level between tall buildings, where conventional systems have been unable to track the vehicle.
By enabling high-accuracy 3D dead reckoning, TESEO DRAW expands the opportunities for developers to commercialize new applications, the company said.
“TESEO DRAW strengthens GNSS performance and eliminates barriers to continuity, enabling exciting new services to emerge,” said Fabio Marchiò, Microcontroller and Infotainment Division general manager, Automotive Product Group, STMicroelectronics. “Users can also experience significant improvements in existing services such as fleet tracking, eCall, or ERA-GLONASS emergency response, usage-based insurance, road tolling, and anti-theft systems.”
TESEO DRAW firmware has multiple modes and is capable of referring to sensors on the vehicle’s CAN bus or discrete sensors such as the odometer, reverse sensor, MEMS accelerometer and gyroscope, or MEMS inertial module connected to the TESEO III IC.
ST is a supplier of MEMS motion sensors for automotive navigation, telematics and vehicle alarm systems, and is a provider of navigation engines with its TESEO IC family. With the launch of TESEO DRAW firmware, ST is able to provide a unified platform comprising navigation engines, 3D positioning capability and motion sensors.
TESEO III ICs loaded with the new TESEO DRAW firmware are sampling now, and will enter mass production in Q1 2016.
A single-feed smart antenna (left) compared to the multipath rejection results of the new TW5340 smart antenna with Accutenna technology. Photo: Tallysman
Tallysman’s new TW5340 smart antenna is designed to pair Tallysman‘s Accutenna technology antenna with STMicroelectronics’ Teseo II receiver. The combination makes the smart antenna accurate for use in all environments, including urban canyons, according to the company.
The TW5340 is a multi-constellation GNSS Smart Antenna that provides simultaneous GPS/GLONASS/SBAS reception. It is designed for use in professional-grade applications such as precision timing, network synchronization, low current applications, and tracking/positioning applications.
To illustrate the advantages of this technology coupling, simultaneous recordings of vehicle position were conducted using two smart antennas — one with and one without Tallysman’s Accutenna technology — in an area of downtown Ottawa, Canada, notorious for high levels of multipath signals. Results show how the high multipath signal rejection capabilities of Tallysman’s Accutenna technology greatly improves accuracy, the company said.
The Tallysman TW5340 smart antenna.
The TW5340 supports STMicroelectronics Autonomous A-GPS, which accelerates GPS positioning by predicting satellite ephemeris data based on previous observations. This results in extremely fast time-to-first-fix. The TW5340 can be configured to output up to three NMEA 0183 message lists with navigation update rates up to 10 Hz. RS232, CMOS, and USB interfaces are available with input voltage options of 3,3V, 5.0V, and 12V. A standby-mode feature provides for very low current consumption (<100uA) and is particularly useful in battery-operated applications.
A standard one pulse-per-second 1PPS synchronized to UTC time is available as a single ended output or as a differential output at RS422 levels.
Tallysman’s Windows-based Configurator enables simple configuration of parameters such a baud rates, output message rates, constellation, tracking parameters, 1 PPS configuration and standby-mode parameters.
The TW5340 is housed in an IP67 housing and is REACH and ROHS compliant. A non-magnetic version is also available as Part Number TW5341.
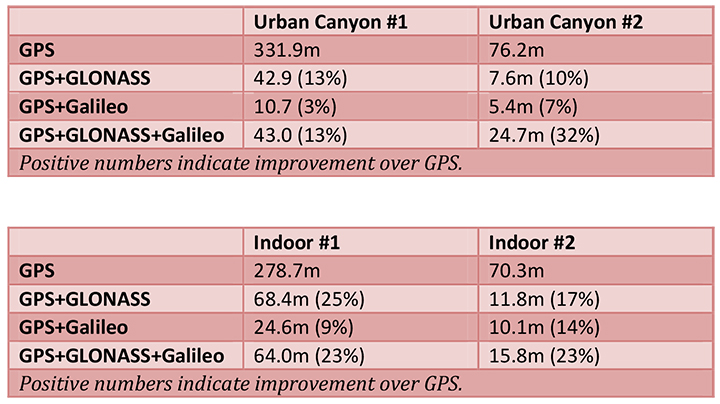
The European GNSS Agency (GSA) and Rx Networks Inc., a mobile location technology and services company, announced the results of tests conducted by the company measuring the performance of Galileo when used in various combinations with GPS and GLONASS.
Tests were conducted in real-world environments, including urban canyons and indoors. These environments pose significant challenges to location accuracy due to multipath and obstructed views of satellites. Each test consisted of a three-hour data capture of GNSS signals, which was later replayed to produce hundreds of fixes using a multi-constellation GNSS receiver from STMicroelectronics.
The results showed that using Galileo with one or more other GNSS constellations provides significantly more accurate location fixes compared to GPS alone, when indoors or in urban canyons. As expected, the GPS+Galileo combination did not exceed the performance of GPS+GLONASS, due primarily to there only being four Galileo satellites available at the time of the testing. It is expected that, as more Galileo satellites are launched, the combination of Galileo with GPS will show further improvements in performance, GSA and RX Networks said.
According to Gian-Gherado Calini, head of Market Development at the GSA, “Dual-constellation GNSS designs are the standard for many smartphones and other devices. The combination of GPS and Galileo provides a robust solution and is expected to offer performance that will meet or exceed end-user expectations.”
“The results should be encouraging to any GNSS chipset manufacturer who is considering adding Galileo as a competitive differentiator,” said Adrian Stimpson, senior vice president of Sales and Marketing, Rx Networks.
Test Results
Recent test results confirm that Galileo significantly improves accuracy in challenging environments:
The tables above show the summary results for various scenarios and constellation combinations. The GPS row shows the absolute 2D errors in meters. All other rows show the improvement (+) or degradation (-) in meters and percentages relative to GPS-only fixes. All measurements are within the 95th percentile.
Spirent Communications now offers SimSAFE, a software solution that simulates legitimate GNSS constellations along with spoofed or hoax signals to evaluate receiver resilience and help develop counter measures.
Hoax or spoofing attacks work by mimicking genuine GNSS signals, which mislead GNSS receivers. The military and critical infrastructure — such as wireless networks, banking, and utilities — are especially interested in being able to detect and reject spoofing attacks.
“GNSS signal vulnerability is becoming a significant issue,” said John Pottle, marketing director of Spirent’s Positioning Division. “The industry is beginning to talk more about vulnerability and how we actually think about categorizing the threat — what approaches are there to evaluate performance in the presence of interference signals? If you’re a developer, what approaches are there to clean up your performance? You’ll see us at Spirent being quite a bit more vocal about these areas in the coming months.”
SimSAFE was developed in conjunction with Qascom, a small organization of half a dozen GNSS signal security and authentication experts headed by Oscar Pozzobon, who served as the chief solutions architect for SimSAFE. Pozzobon contributed his knowledge of GNSS security and vulnerabilities, which were then integrated into the SimSAFE system.
SimSAFE provides a means of emulating a spoofing attack, and then monitoring a receiver under attack to evaluate mitigation strategies and countermeasures.
“SimSAFE really gets into details on how a receiver reacts in the presence of the hoax signals,” Pottle said. “By really understanding that, really getting into how is the receiver is acting and reacting, you can understand better how your receiver is likely to behave, and tune it up.”
The SimSAFE laboratory-based test solution is fully controllable, so that users can evaluate a receiver’s response to a wide range of spoofing attacks. As Pottle put it, when fed both authentic and spoofed signals, “What’s the receiver going to see? It’s going to see the authentic signals, it’s going to see a couple of spoofed signals. And you can play around with the spoofed signals — that’s the controllable bit. While this is happening, the detector module within SimSAFE monitors and reports the receiver’s response to the attacks. At its most simple, that’s the power of SimSAFE.”
SimSAFE is aimed not only at receiver developers, a core audience of Spirent’s, but at anyone trying to build a system that may be subject to intentional interference, such as in the military or critical infrastructure. “Those people are starting to ask questions about what should I be worried about? What kind of an attack might I be open to? How can I be sure, if I’ve got a choice of three or four receivers, that I’m going to choose one that meets my needs in terms of resilience to intentional interference?” Pottle said. “Our belief is that SimSAFE will allow people to evaluate different receivers and strategies for mitigating spoofing attacks, and therefore help them to build the right level of resilience in their systems.”
SimSAFE is available in two variants. SimSAFE Simulated uses the simulator for all signals, both satellite and spoofed, using one or more channels for the spoofed signal.
Instead of a simulator, SimSAFE Live pulls authentic signals from sky with an antenna, so the user has the full power of the simulator to generate a much broader range of spoofing attacks. “The clever bit is aligning the spoofed signal with the real signal, getting the timing and frequency synced up,” Pottle said.
Spirent is also working on other technologies to mitigate spoofing, including work with interference signals from ground-based transmitters, adaptive antenna lab-based tests, and integration with inertial sensors, such as in military jets.
The Teseo II chip is ready for eCall, a European initiative intended to bring rapid assistance to motorists involved in a collision anywhere in the European Union.
STMicroelectronics, a global semiconductor company, has released its Teseo II single-chip satellite-tracking integrated circuit to the European Space Agency (ESA) and the European Commission Joint Research Center (JRC) for testing for eCall approval. The testing campaign is coordinated by the European GNSS Agency as part of its effort to accelerate Galileo adoption.
The Galileo tests will be conducted by the ESA and JRC over the next months to validate ST’s latest firmware release, according to the European GNSS Agency (GSA) test plan. The testing campaign supports the upcoming Galileo early operational services that are expected to go live at the end of 2014. In addition, the tests will evaluate Teseo II compatibility with the European Geostationary Navigation Overlay Service (EGNOS) and with Galileo for the eCall in-vehicle system that automatically sends notification messages from vehicles involved in an accident. Beside static and dynamic test conditions, the testing plan foresees three different use cases, in systems for single-, dual-, and up to triple-constellation (GPS/Galileo/GLONASS) systems.
Following the first position fix using Galileo in-orbit validation satellites conducted by ST and ESA in March 2013, STMicroelectronics has implemented the Galileo Golden-candidate production firmware as an additional constellation in its Teseo II chips. While the Teseo II ICs have always had the capability to be Galileo-ready, ST is enabling a firmware update from the Galileo navigation system. This update benefits consumers and doesn’t require any hardware modification.
The Teseo II chips can simultaneously use signals from multiple satellite navigation systems, including the currently available Galileo satellites, and progressively, as future satellites are launched, the full satellite constellation.
ST’s leadership in the multi-constellation reception delivers immediate use of the Galileo satellites already in orbit, and provides consumers with shorter time-to-first-fix, continuous tracking with enhanced accuracy, and effective operation under challenging circumstances, such as driving through urban canyons.
In January, GPS Worldpublished a cover story on the next-generation Teseo-3 chip, which also provides background on the development of the Teseo II.
Introduced in January 2011, ST’s Teseo II is a standalone satellite receiver able to use signals from multiple satellite navigation systems, including GPS, the European Galileo system, Russian GLONASS, and Japanese QZSS. This multi-constellation approach keeps many satellites in sight, delivering advantages such as shorter time-to-first-fix and continuous tracking with enhanced accuracy, even under challenging circumstances such as driving through urban canyons.
In December 2011, Grizzly Analytics released its first comprehensive report on indoor location positioning technology, predicting that indoor location services were ready to revolutionize the mobile market. The five months that followed have shown how true this was, with new initiatives announced on a regular basis and numerous demonstrations at industry conferences, Grizzly Analytics says.
In a fully revised and updated 163-page report, Grizzly Analytics gives an up-to-date analysis and comprehensive overview of indoor location positioning R&D. Included is information on the research activity of all the major mobile companies — Google, Microsoft, Samsung, Apple, Nokia, RIM, Cisco, Qualcomm, Broadcom, STMicroElectronics, Sony Ericsson and others — and also more than 30 start-up companies that are actively bringing indoor location services to market.
“These technologies are poised to revolutionize smartphone usage by enabling GPS-style mapping, navigation, local search, check-ins, location-sharing and other location-based services to work indoors in malls, megastores, offices, airports, casinos and other big indoor places,” according to a statement by Grizzly Analytics. “Indoor location will also transform commerce, enabling searching for items on store shelves, sending deals and promotions to nearby customers, advertisements for nearby stores in malls, and more. Location services are also entering the enterprise, with indoor asset tracking, employee search, and more.
“In this updated technology trend report, Indoor Location Positioning: Research Pipelines, Start-ups and Predictions, Grizzly Analytics answers the questions you have about this new technology. What approaches are being researched by different companies? Which companies have mature research? What are the gaps in each company’s research that they are likely to fill by acquiring start-up companies? Which start-up companies are likely to be acquired or to emerge successful in the market? What areas of technology are not yet addressed by start-ups, and remain open to new entrepreneurs and investors?”
A one-chip multiconstellation GNSS receiver, now in volume production, has been tested in severe urban environments to demonstrate the benefits of multiconstellation operation in a consumer receiver. Bringing combined GPS/GLONASS from a few tens of thousands of surveying receivers to many millions of consumer units, starting with satnav personal navigation devices in 2011, followed by OEM car systems and mobile phones, significant shifts the marketplace. The confidence of millions of units in use and on offer should encourage manufacturers of frequency-specific components, such as antennas and SAW filters, to enter volume mode in terms of size and price.
One-chip GPS/GLONASS receiver trials in London, Tokyo, and Texas sought to demonstrate that the inclusion of all visible GLONASS satellites in the position solution, in addition to those from GPS, produces much greater availability in urban canyons, and in areas of marginal availability, much greater accuracy.
Multi-constellation receivers are needed at the consumer level to make more satellites available in urban canyon environments, where only a partial view of the sky is available and where extreme integrity is required to reject unusable signals, while continuing to operate on other signals deeply degraded by multiple reflection and attenuation. This article briefly outlines the difficulties of integrating a currently non-compatible system (GLONASS), offering an economic solution in the mass market where cost is king, but performance demands in terms of low signal, power consumption, time-to-first-fix, and availability are extreme. While the accuracy achieved is not at survey levels, we deem it sufficient to meet consumer demands even at the worst signal conditions.
The aim is to provide improved indoor and urban canyon availability for mass-market GNSS by using all available satellites; in 2011, that requires GLONASS support, as the constellation availability precedes Galileo by around three years. The aim is to overcome the hardware incompatibility issues of GLONASS, that is, its frequency division multiple access (FDMA) signal rather than the code division multiple access format used by GPS, different centre frequency, and different chipping rate, all without adding significantly to the silicon cost of the receiver chipset. This then allows a total satellite constellation of about 50 to be used at present, even before two recently launched Galileo IOV satellites.
It is expected that in benign conditions the additional satellites will give little benefit, as availability approaches 100 percent, and accuracy is excellent, with GPS alone. Though dominated by the ionosphere, using seven, eight, or nine satellites in the fix minimises the amount of error that feeds through to the final position.
In marginal conditions, where GPS can give a position, but is using 3/4/5 satellites and those are clustered in the narrow visible part of the sky resulting in poor DOP values, the increased number of satellites benefits the accuracy greatly, due to both improved DOP and multipath-error averaging. Limited satellites mean the full multipath errors map into position and are magnified by the DOP. Adding the second constellation means more clear-view satellites for accuracy, more total satellites to minimise the errors, and the errors are less magnified by the geometry due to better DOP.
In extreme conditions, where insufficient GPS satellites are seen to give a fix, the additional GLONASS satellites increase the availability to 100 percent (excluding actual tunnels).
Availability is a self-enhancing positive feedback loop… if satellites are always tracked, even if rejected on a quality basis by the RAIM/fault detection and exclusion (FDE) algorithms, then they do not need to be reacquired, so become available for use earlier. If position can be maintained, then the code phases for obstructed satellites can continue to be predicted accurately, allowing instant reacquisition after obstruction, and instant use as no code pull-in time is required. Once availability is lost, the reverse applies, as wrong position means worse prediction, longer re-acquisition, and hence again less availability.
The extra visible satellites are very significant for the consumer, particularly — as for example with self-assistance where the minimum constellation is five satellites, not three to four — to autonomously establish that all satellites are healthy using receiver-autonomous integrity monitoring (RAIM) methods. Self-assistance has further major benefits for GLONASS, in that no infrastructure is required, so there will be no delay waiting for GLONASS assistance servers to roll out. The GLONASS method of transmitting satellite orbits is also very suitable for the self-assistance algorithm, saving translation into and out of the Kepler format.
Significance of Work
Previous attempts to characterize the multi-constellation benefits in urban environments have been handicapped by the need to use professional receivers not designed for such signal conditions, and by the need to generate a separate result for each constellation or sacrifice one satellite measurement for clock control. These problems made them unrepresentative of the performance to be expected from the volume consumer device.
This new implementation is significant in being a true consumer receiver for high sensitivity, fully integrated both for measurement and for computation. Thus fully realistic trials are reported for the first time.
Background
The tests were performed on the Teseo-II single chip GNSS receiver (STA-8088). A brief history: our 2009 product Cartesio+ already included GPS/Galileo, and the digital signal processor (DSP) design has been extended to include GLONASS also for Teseo2, the 2010 product. Test results with real signal data through FPGA implementations of the baseband started in late 2009, and with the full product chip in 2010.
The architectural design showed that the silicon could be implemented with only small additional silicon area. Changes to the baseband DSP hardware and software were small and were included in the next scheduled upgrade of the chip, Teseo2. The RF chip silicon requires much greater attention, duplicating the intermediate frequency (IF) path and analog-digtal converter (ADC), with additional frequency conversion and a much wider IF filter bandwidth; however, as the RF silicon area is very small in total, even a 30 percent increase here is not a significant percentage increase on the whole chip. As the design is for an integrated single chip system (RF and baseband, from antenna to position, velocity, and timing (PVT) solution), the overall silicon area on a 65-nanometer process is very small.
Commercially, it is new to include all three constellations in a single consumer chip. Technically it is new to use a pool of constellation-independent channels for GLONASS, though standard for GPS/Galileo. Achieving this flexibility has also required new techniques to manage differing RF hardware delays, different chipping rates, in addition to the coordinated universal time (UTC) offset and geoid offset problems already well known to the surveying community.
It is also very unusual to go direct to a single-chip solution (RF+baseband+CPU) for such a major technology step. The confidence for this step comes from the provenance of the RF and the baseband, the RF being an extension of the STA5630 RF used with Cartesio+, and the baseband being significant but not major modifications of the GPS/Galileo DSP used inside Cartesio+. 5630/Cartesio+ were proven in volume production as separate chips before the single-chip three-constellation chip starts production.
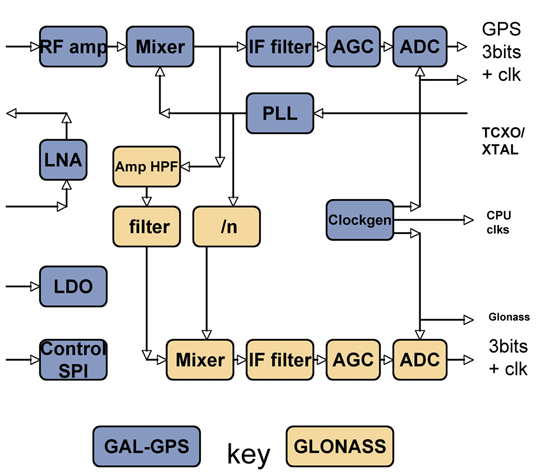
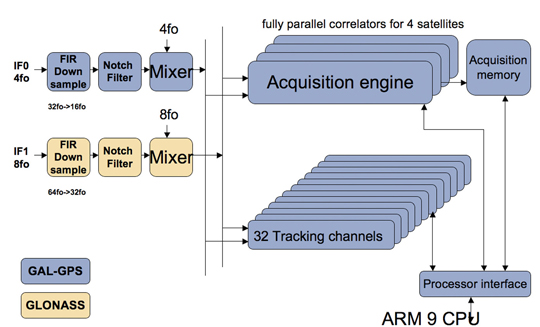
The steps forward from the previous generation of hardware are on chip RF, Galileo support, GLONASS support. While Galileo can pass down the existing GPS chain, with appropriate bandwidth changes, additional changes are required for GLONASS: see Figures 1 and 2.
Figure 1. RF changes to support GLONASS.Figure 2. Baseband changes to support GLONASS.
In the RF section, the LNA, RF amp, and first mixer are shared by both paths, in order to save external costs and pins for the equipment manufacturer, and also to minimize power consumption. Then the GLONASS signal, now at around 30 MHz, is tapped off into a secondary path shown in brown, mixed down to 8 MHz and fed to a separate ADC and thus to the baseband.
In the baseband, an additional pre-conditioning path is provided, again shown in brown, which converts the 8 MHz signal down to baseband, provides anti-jammer notch filters, and reduces the sample rate to the standard 16fo expected by the DSP hardware.
The existing acquisition engines and tracking channels can then select whether to take the GPS/Galileo signal, or the GLONASS signal, making the allocation of channels to constellations completely flexible.
Less visible but very important to the system performance is the software controlling these hardware resources, first to close tracking loops and take measurements, and secondly the Kalman filter that converts the measurements to the PVT data required by the user. This was all structurally modified to support multiple constellations, rather than simply adding GLONASS, in order that future extensions of the software to other future systems becomes an evolutionary task rather than a major re-write.
The software ran on real silicon in 2010, but using signals from either simulator or static roof antennas, where accuracy and availability of GPS alone are so good that there is little room for improvement. In early 2011, prototype satnav hardware using production chips, antennas, and cases became available, making mobile field trials viable.
Actual Results
Results have already been seen from trials using professional receivers with independent GPS and GLONASS measurements. However, those tests were not representative of the consumer receiver because they are not high sensitivity; because the receivers require enough clean signal to operate a PLL, which is not realistic in a mobile city environment; and because they were creating two separate solutions, thus needing a continuous extra satellite to resolve inter-system time differences.
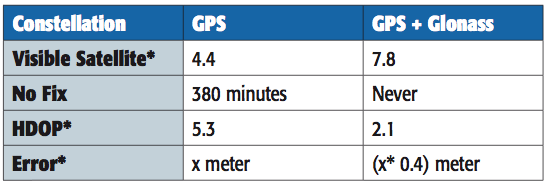
A 2010 simulation of visible satellites in a typical urban canyon of downtown Milan, Italy, produced the results, every minute averaged for a full 24 hours, shown in Table 1. The average number of satellites visible rises from 4.4 with GPS alone, to 7.8 for GPS+GLONASS, with the result that there are then zero no-fix samples. With GPS alone there were 380 no-fix samples, or 26 percent of the time.
Table 1. Accuracy and availability of GPS and GPS+GLONASS, averaged over 24 hours.
However, availability is not itself sufficient. Having more satellites in the same small piece of sky above the urban canyon may not be sufficient, due to geometric accuracy limitations. To study this, the geometric accuracy represented by the HDOP was also collected, and shows an accuracy 2.5 times better.
Previous studies suggested that in the particular cities tested, two to three additional satellites were available, but one of these was wasted on the clock solution. Using the high-sensitivity receiver, we expected four or five extra satellites and none wasted.
The actual results far exceeded our expectations. Firstly, many more satellites were seen, as all previous tests and simulations had excluded reflected signals. Having many more signals, the DOP was vastly improved, and the effect of the reflections on accuracy was greatly reduced, both geometrically, and by the ability of the FDE/RAIM algorithms to maintain their stability and down-weight grossly erroneous signals rather than allow them to distort the position.
The results presented here are from a fully integrated high-sensitivity receiver optimized to use signals down to very low levels, and to give a solution derived directly from all satellites in view, no matter which constellation.
This produces 100 percent availability, and much improved accuracy in the harsh city environment.
Availability
The use of high-sensitivity receivers, not dependent on phase-locked loops (PLLs) for tracking, produces 100 percent availability in modern cities, even high-rise, due to the reflective nature of modern glass in buildings, even for GPS alone. Thus some other definition of availability is required rather than “four sats available,” such as sats tracked to a certain quality level, resulting in a manageable DOP. Even DOP is difficult to assess, as the Kalman filter gives different weights to each satellite, not considered in the DOP calculation, and also uses historic position and current velocity, in addition to instantaneous measurements, to maintain the accuracy of the fix.
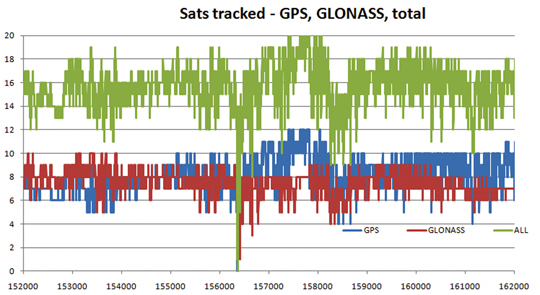
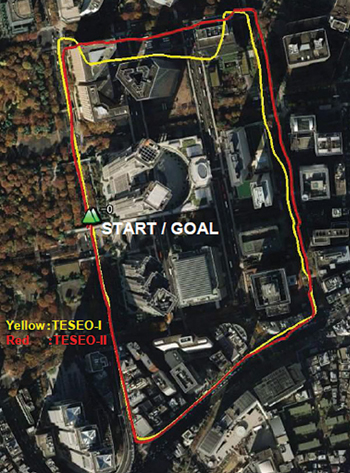
Figure 3 shows the availability of tracked satellites in tests in the London City financial district in May 2011.
As can be seen, there are generally seven to eight GLONASS satellites and eight to nine GPS satellites, for a total of around 16 satellites. The only period of non-availability was in a true tunnel (Blackfriars Underpass) at around time 156400 seconds. In other urban canyons, around time 158500 and 161300, individual constellations came down to four satellites, but the total never fell below eight. Note this is an old city, mainly stone, so reflections are limited compared with glass/metal buildings.
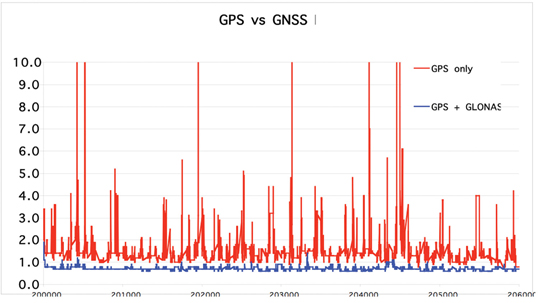
While outside tunnels, availability is 100 percent, this may be limited by DOP or accuracy. As can be seen in Figure 4 on another London test, the GNSS DOP remains below 1, as might be expected with 10–16 satellites, while GPS-only frequently exceeds four, with the effect that any distortions due to reflections and weak signals are greatly magnified, with several excursions over 10.
Figure 4. GPS-only versus combined GPS/GLONASS dilution of precision.
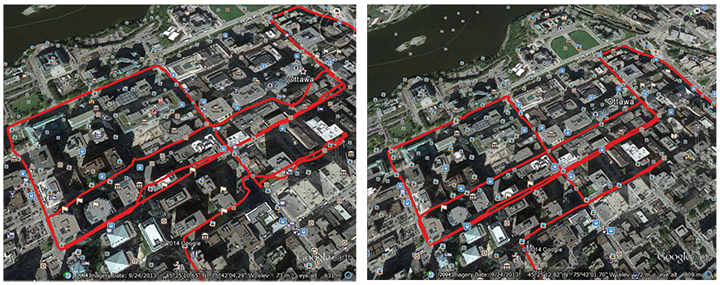
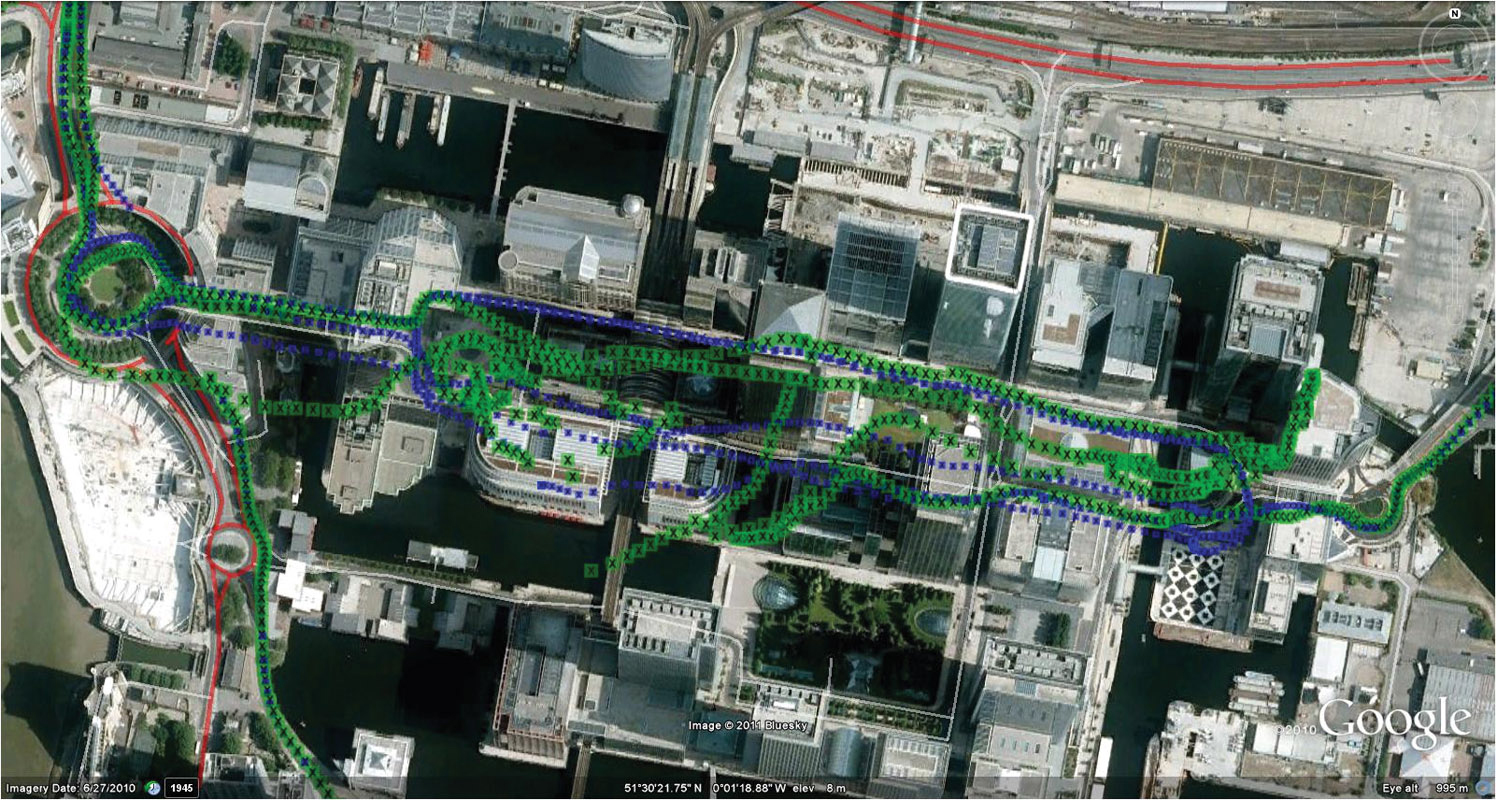
As the May 2011 tests had not been difficult enough to stress the GPS into requiring GNSS support, a further trial was performed in August 2011. This was in a modern high-rise section of the city, Canary Wharf, shown in Figure 5 on an aerial photograph. In addition to being high-rise, the roads are also very narrow, resulting in very difficult urban canyons. Being a modern section of the city, the buildings are generally reflective glass and metal, rather than stone, testing RAIM and FDE algorithms to the extreme.
Figure 5. GPS versus GNSS, London Canary Wharf (click to enlarge.)
This resulted in difficulty for the GPS-only solution, shown in green, especially in the covered section of the Docklands station, center-left, lower track.
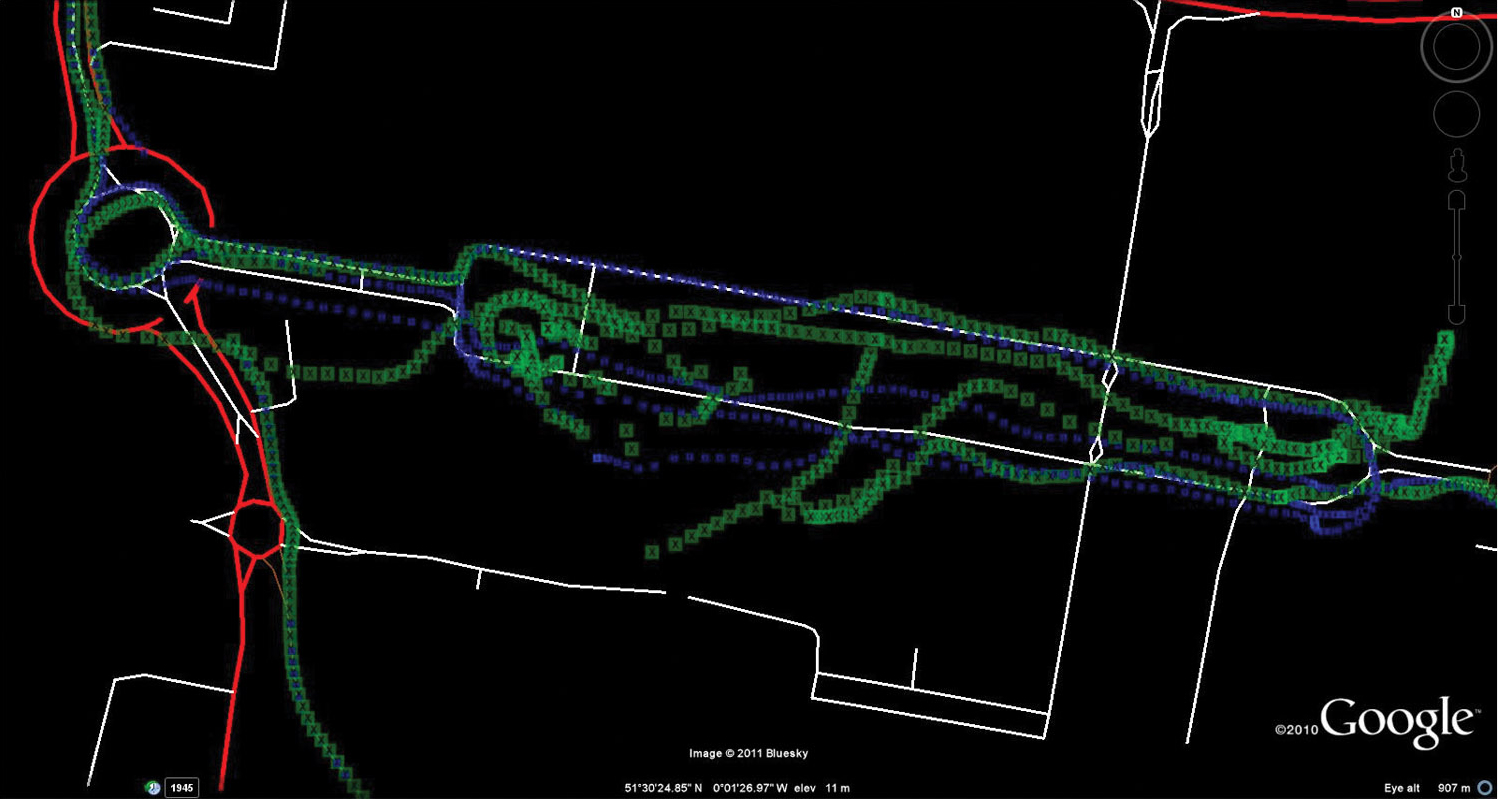
Figure 6 shows the same test data displayed on truth data taken from the ordnance survey vector map data of the roads.
Figure 6. GPS versus GNSS, London Canary Wharf, on vector truth (click to enlarge.)
The blue GNSS data is then extremely good, especially on the northern (eastbound) part of the loop (UK drives on the left, thus one-way loops are clockwise).
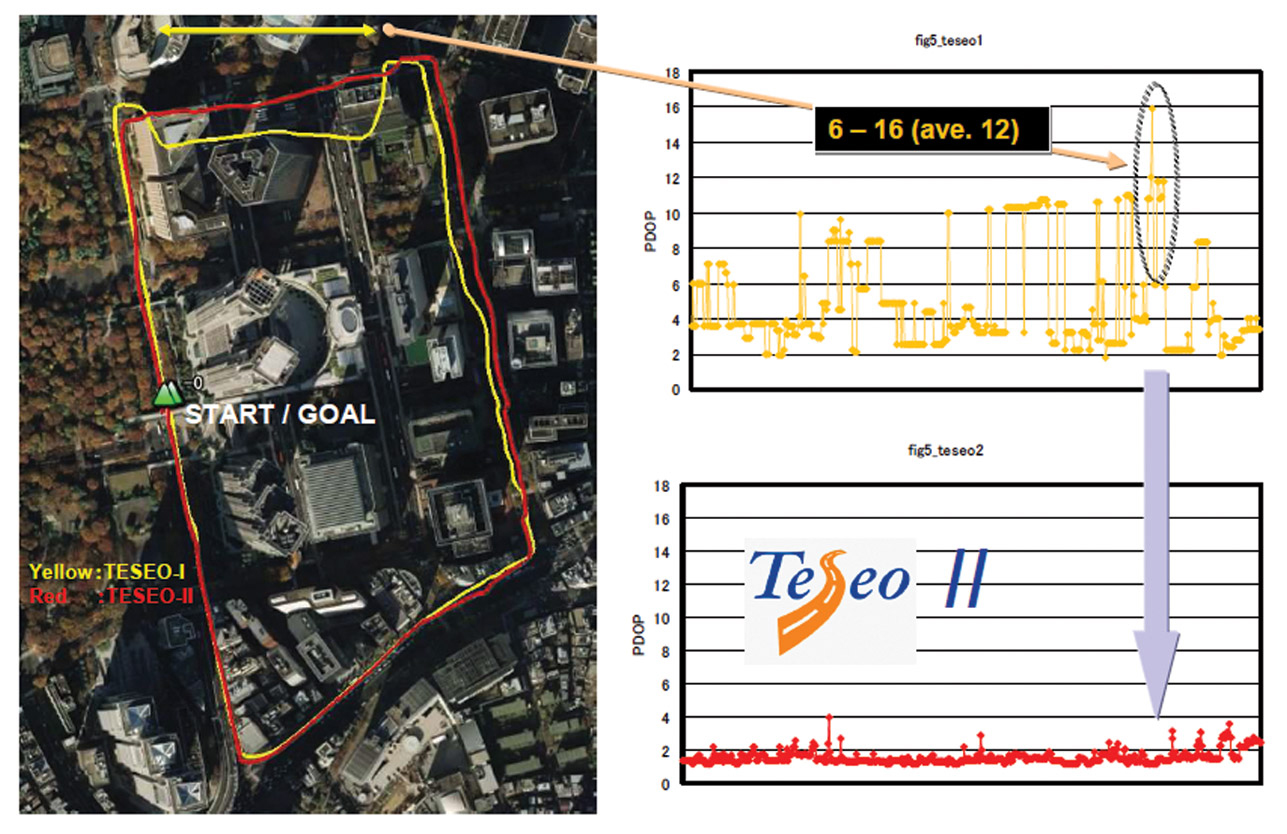
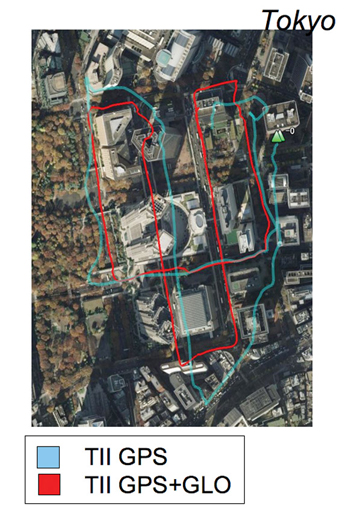
Further tests were carried out by ST offices around the world. Figure 7 shows a test in Tokyo, where yellow is the previous generation of chip with no GLONASS, red was Teseo-II with GPS plus GLONASS.
Figure 7. Teseo-I (GPS) versus Teseo-II (GNSS) in Tokyo test.
Again, here the scenario is not sufficiently challenging to hurt the availability even of GPS alone, but the accuracy is limited.
Figure 8 gives some explanation of the accuracy problems, by showing the DOP during the test. It can be seen that Teseo-II DOP was rarely above 2, but the GPS-only version was between 6 and 12 in the difficult northern part of the test, circled for illustration.
Figure 8. DOP during Tokyo tests (click to enlarge.)
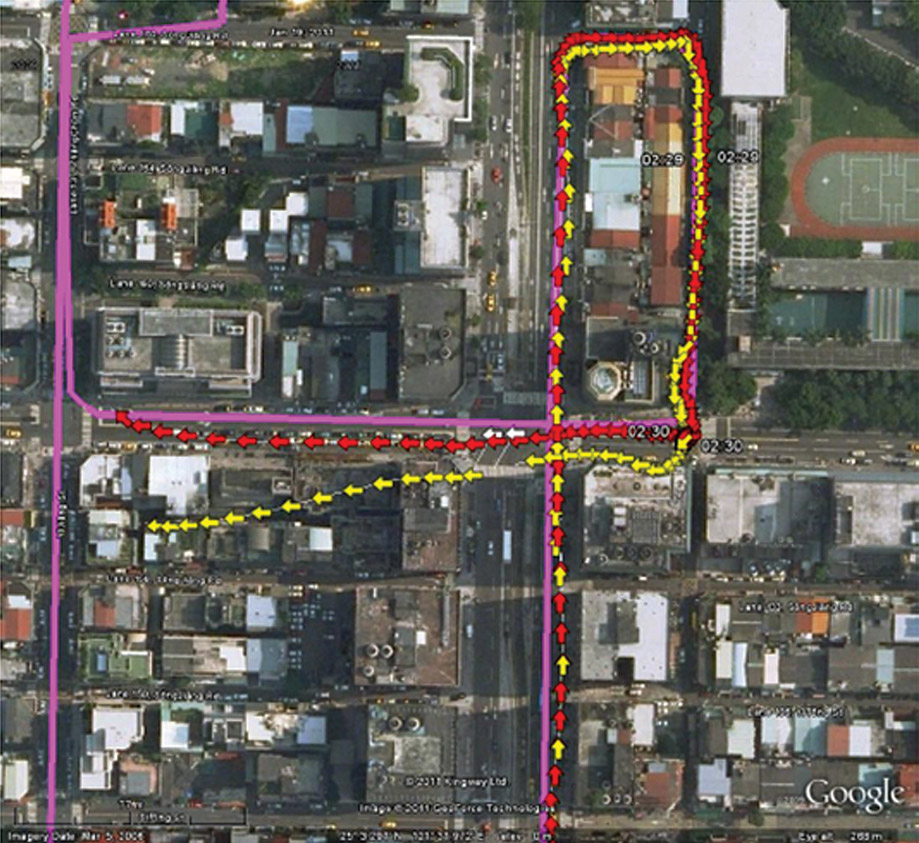
Further Tokyo tests were performed entering the narrower urban canyons in the same test area, shown in Figure 9. Blue is GPS only, red is GPS+GLONASS, and the major improvement is obvious.
Figure 9. GPS only (blue) versus GNSS (red), Tokyo.
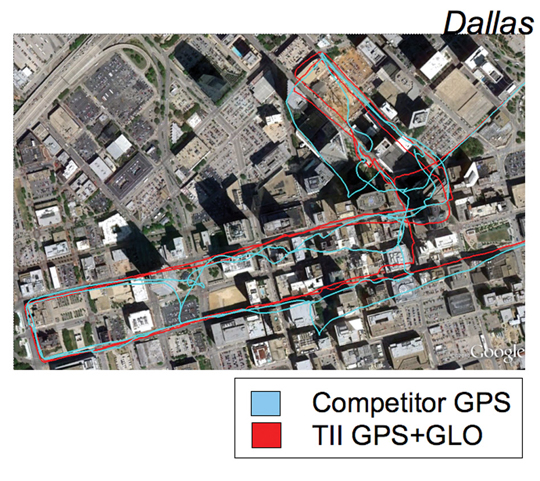
Figure 10 uses the same color scheme to illustrate tests in Dallas, this time with a competitor’s GPS receiver versus Teseo-II configured for GPS+GLONASS, again a huge benefit.
Figure 10. GPS only (blue, competitor) versus GNSS (red), Dallas.
Other Constellations
While Teseo-II hardware supports Galileo, there are no production Galileo satellites available yet (September 2011), so the units in the field do not have Galileo software loaded.
However, the Japanese QZSS system has one satellite available, transmitting legacy GPS-compatible signals, SBAS signals, and L1C BOC signals. Teseo-II can process the first two of these, and while SBAS is no benefit in the urban canyon as the problems of reflection and obstruction are local and unmonitored, the purpose of QZSS is to provide a very high-angle satellite, so that it is always available in urban canyons.
Figure 11 shows a test in Taipei (Taiwan) using GPS (yellow) versus GPS plus one QZSS satellite in red, with the truth data shown in purple.
Figure 11. GPS only (yellow) versus GPS+QZSS(1 sat, red), truth in purple, Taipei (click to enlarge.)
Further Work
The test environment will be extended to yield quantitative accuracy results for UK tests where we have the vector truth data for the roads.
The hardware flexibility will be extended to support Compass and GPS-III (L1-C) signals, in addition to Galileo already supported. Acquisition and tracking of these signals have already been demonstrated using pre-captured off-air samples.
In 2010, the Compass spec was not available. Thus the Teseo-II silicon design was oriented to maximum flexibility in terms of different code lengths, such as BOC or BPSK, so that by using software to configure the hardware DSP functions, the greatest chance of compatibility could be achieved.
The result was only a marginal success, in that the 1561 MHz frequency of the regional Compass system can only be supported using the flexibility of the voltage-controlled oscillator and PLL, meaning that it cannot be supported at the same time as other constellations. Additionally, the code rate on the regional system is also 2 M chips/second, which is not supported, so is approximated by using alternate chips, producing serious signal loss.
So the hooks for Compass are only useful for research and software development, either for a single-constellation system, or using a separate RF front end.
The worldwide Compass signal, which is on a GPS/Galileo signal format in both carrier frequency and in code length and rate, will be directly compatible, but is not expected to be fully available until 2020.
The city environment testing will be repeated as the Galileo constellation becomes available. With 32 channels, an 11/11/10 split (GPS/Galileo/GLONASS) may be used when all three constellations are full, but for the next few years 14/8/10 satisfies the all-in-view requirements.
Conclusions
The multi-constellation receiver can include GLONASS FDMA at minimal increased cost, and with its 32 channels tracking up to 22 satellites in a benign environment, even in the harshest city environment sufficient satellites are seen for 100 percent availability and acceptable accuracy. 10–16 satellites were generally seen in the urban canyon tests. The multiplicity of measurements allows RAIM and FDE algorithms to be far more effective in eliminating badly reflected signals, and also minimizes the geometric effects of remaining distortion on the signals retained.
Acknowledgments
ST GPS products, chipsets, and software, baseband and RF are developed by a distributed team in Bristol, UK (system R&D, software R&D); Milan, Italy (silicon implementation, algorithm modelling and verification); Naples, Italy (software implementation and validation); Catania, Sicily, Italy (Galileo software, RF design and production); and Noida, India (verification and FPGA). The contribution of all these teams to both product ranges is gratefully acknowledged.
Philip Mattos received a master’s degree in electronic engineering from Cambridge University, UK, a master’s in telecoms and computer science from Essex University, and an external Ph.D. for his GPS work from Bristol University. He was appointed a visiting professor at the University of Westminster. Since 1989 he has worked exclusively on GPS implementations and associated RF front ends, currently focusing on system-level integrations of GPS, on the Galileo system, and leading the STMicroelectronics team on L1C and Compass implementation, and the creation of generic hardware to handle future unknown systems.