The year 2014 is most certainly the Year of Galileo.
After rising up from near elimination in 2008 due to much confusion about how to fund it, the European Union, that same year, decided to allocate 3.4 billion euros to fund the ground infrastructure and the initial satellites. Unlike the U.S. GPS and Russian GLONASS systems, Galileo is civilian-funded as opposed to being funded primarily from defense budgets, which makes it politically much more difficult to gain funding. But, they did it.
That was six years ago.
Since then, ground infrastructure has been designed and built. Six test satellites have been designed, built and successfully launched into orbit. In early 2013, the first position fix using only Galileo satellites was achieved. With all the necessary test satellites launched and systems tested, the anticipation of FOC (Full Operational Capability) satellite launches has been high, because it would signal the rapid deployment of the Galileo navigation system that would so complement GPS and so benefit the high-precision GNSS user community.
Soyuz Flight VS09, carrying Europe’s fifth and sixth Galileo satellites, lifts off from Europe’s Spaceport in Kourou, French Guiana.
That moment arrived last month, on August 22, with the launch of the first two Galileo FOC satellites. The significance of the first FOC launch is that it would trigger an aggressive launch schedule comprised of one launch every three months, at two satellites per launch — equaling eight satellites launched per year. With four test satellites already in orbit being converted to operational satellites, one can envision 16 Galileo satellites in orbit by the end of next year. While not a complete constellation at that point, it would offer plenty of upside — worldwide I might add, as I’ve written about in the past — by adding more satellites in view and accelerating the adoption of the new L5 signal, which is also supported by GPS.
Between Europe deploying Galileo and China deploying its BDS (BeiDou) system, the world of high-precision GNSS is going to change a lot in the next couple of years. There will be more receiver choices at much lower prices for RTK receivers.
But, the satellite navigation business is not a forgiving one. The devil is in the details, and the number of details has got to be overwhelming. Consequently, there have been many casualties.
The Russians have taken their lumps, losing a total of seven GLONASS satellites to faulty rocket launches in just the past four years.
In 2009, the U.S. placed into orbit a GPS satellite, SVN-49, that never has been set healthy, rendering it a “$100M test satellite.”
Now, the Europeans have joined the club.
The “pucker factor” during the satellite launches is always high, so on August 22, when two Galileo satellites mounted on a Russian Soyuz rocket at the Arianespace launch pad in French Guiana were pushed up into space, there must have been a sigh of relief that the launch seemed to go smoothly. Even I was excited, Tweeting “#Galileo Launch Successful, Satellites Deployed. Booyah!”, shortly after the launch.
However, looks can be deceiving.
It turns out that somehow, some way, the two Galileo satellites, after years of planning, were inserted into the wrong orbits.
The liftoff and first part of the mission proceeded nominally, reports Arianespace, leading to release of the satellites according to the planned timetable, and reception of signals from the satellites. However, the targeted orbit was circular, inclined at 55 degrees with a semi major axis of 29,900 kilometers. The satellites are now in an elliptical orbit, with excentricity of 0.23, a semi major axis of 26,200 km and inclined at 49.8 degrees.
With navigation satellites, we’ve seen disastrous launch failures and defective satellites placed in orbit, but I can’t recall ever hearing about navigation satellites being inserted into the wrong orbits. It’s difficult not wonder how such a seemingly simple error could occur, yet sympathize with the Galileo program managers given the complexity of the task, but also appreciate the consistency and reliability of GPS satellite deployments.
Galileo satellites fastened to upper stage.
The Russians quickly commented on the satellite deployment anomaly since it was a Russian Soyuz rocket launcher, speculating that it was a software bug. The Russian newspaper Izvestia quoted an unnamed source from the Russian Space Agency Roscosmos that “the failure of the European Union’s Galileo satellites to reach their intended orbital position was likely caused by software errors in the Fregat-MT rocket’s upper stage.”
It’s too early to say if the Galileo satellites will ever become serviceable. The Monday following the launch, an independent inquiry commission was formed to “establish the circumstances of the anomaly, to identify the root causes and associated aggravating factors, and make recommendations to correct the identified defect and to allow for a safe return to flight for all Soyuz launches from the Guiana Space Center (CSG).”
This subject will certainly be a hot topic at the Institute of Navigation (ION) GNSS conference being held next week in Tampa, Florida. A full staff of GPS World editors and administration folks will be attending, including yours truly. It’s the premiere GNSS technical event of the year, so I’m sure there will be plenty of scientists and program managers commenting and speculating on the future of these two satellites.
If you’d like the latest news on this and other GNSS-related subjects during the conference next week, follow me on Twitter at https://twitter.com/GPSGIS_Eric. There are lots of interesting subjects at the ION GNSS+ conference. Take a look at the conference agenda here. I’ll be attending many of the presentations related to high-precision GNSS and report to you in next month’s newsletter. To give you a flavor, following are some of the presentations that I’m going to try to attend.
The Triple-frequency Multi-system RTK Engine for Challenging Environments
Mobile Mapping Using Smartphone
Analysis of Using Smartphones for Indoor Mobile Mapping
GPS Program update
Galileo Program Update
Glonass Program update
BDS Program update
GLONASS Only and BeiDou Only RTK Positioning
Comparing Multi-constellation and Multi-frequency Based on GPS/Beidou RTK Positioning
Combined GPS+BDS+Galileo+QZSS for long single-baseline RTK positioning
Real-time PPP with Galileo, Paving the Way to European High Accuracy Positioning
High-Precision GNSS — What will it Look Like in 2020?
A few weeks ago at the Esri 2014 International User conference in San Diego, California, we conducted our first live event webinar from a Plexiglas booth sitting among many of the 14,000+ attendees buzzing around inside the San Diego Convention Center.
The webinar focused on high-precision GNSS on mobile devices (iOS/Android/Windows), unmanned aerial systems (UAS), and real-time GIS transactions. These are hot topics in the geospatial world, and that was confirmed when I received about 100 pre-webinar questions and more than 100 post-webinar questions.
In my article this month, I’ll do my best to provide answers to the questions asked. If I don’t get to your question, or if you have another, please email me at [email protected].
First of all, if you didn’t attend the webinar and would like to view the recording, you can register here and you’ll be provided a link to view it. It’s a great, interactive discussion. I grabbed Sharad Garg, iOS consultant, from the Esri show floor to talk about the intricacies and complexities of using GNSS receivers on iPads and iPhones.
Without further delay, following are some of the more popular pre- and post-webinar questions I received.
Mobile Devices
First, I’ll start with the questions about mobile devices and high-precision GNSS.
1. Will Android be the dominant mobile tablet platform in the Enterprise?
It’s hard to say. I recently met with a group of enterprise IT professionals and we were discussing this issue. Basically, the group was equally divided into thirds. One third were using Android. one third were using iOS, and one third were using Windows.
Android advantages: Lots of mobile devices available that run Android. Android disadvantages: Open source = non-standard implementations, so app software may not run on every device; security concerns.
iOS advantages: Consistent user interface, consistent software development environment, popularity of iPad and iPhone. iOS disadvantages: Closed ecosystem (very limited number of tablets); doesn’t interface to devices (such as GNSS) that haven’t been through the Apple certification process; security concerns.
Windows advantages: Security; lots of legacy apps and utilities written for Windows. Windows disadvantages: Limited number of tablets being deployed based on Windows.
For enterprise organizations, data security is a huge concern. Since Android is open source and gaining the most market share (at least in the consumer market), it’s got a target on its back for hackers. That’s the biggest concern I hear from corporate IT professionals. How will Android device developers address that, or will they? The consumer market for Android devices is exploding regardless of security. Do they even care about the enterprise market? Apparently Apple does as it recently signed an agreement with IBM to address the enterprise market, with IBM committing to deploying more than 100 enterprise solutions for iOS.
Site of the webinar broadcast from the Esri UC.
2. Which mobile platform is the most universal/easy to integrate with GNSS receivers?
Out of the box, Windows and Windows Mobile devices are still the easiest to interface to external GNSS receivers for the average consumer. Using Bluetooth, serial or USB, NMEA (or proprietary binary) data flows easily via the device com port or virtual com port. If you’re using a Bluetooth interface, there is some inconsistency among mobile devices due to the different versions of Bluetooth management software used on mobile devices, but it’s workable, and worst case you can buy an inexpensive third-party Bluetooth software manager like BlueSoleil.
With the use of an app such as Bluetooth GPS that allows you to select an external GNSS receiver, connecting your Android device to an external Bluetooth GNSS receiver is relatively painless.
Apple products are the toughest to integrate with external GNSS receivers via Bluetooth. Each GNSS receiver has to be specifically designed with an Apple Bluetooth authentication chip and be subjected to the Apple certification process, which can be lengthy and costly. This is the reason why you see very few Bluetooth GNSS receivers available for Apple products. The good news is that once the GNSS receiver is approved, the Bluetooth connection happens automatically when the GNSS receiver is in range of the Apple device. No com port config, no baud rate to worry about, etc.
3. What is available on Android that will make my smartphone a practical and useable tool that can assist in collecting professional data?
First of all, you need to find a high-precision Bluetooth receiver to connect to your Android device. Then, establish the Bluetooth partnership between the Android and GNSS receiver (scan for Bluetooth devices, enter passcode, etc). Once you have that, download the Bluetooth GPS utility I mentioned above and it will allow you to select which GNSS device to use (external vs. internal). Once you’ve selected the external GNSS receiver and connected to it via Bluetooth, every location app on your Android device will use the high-precision GNSS receiver for location.
This applies to an Android tablet or Samsung Galaxy phone. Take a look at this article to see how I ran RTK on a Samsung Galaxy using a Bluetooth RTK receiver.
Today’s challenge is finding “professional” GIS data collection apps that run in the Android environment. There are a few, but the selection is limited. Esri has its Collector for ArcGIS app that runs on Android, but it requires an ArcGIS server backend or ArcGIS Online account. Other data collection apps like Fulcrum and Amigocloud run on Android as cloud-based services.
4. Is there an actual GPS receiver within smartphones, or are they triangulating off of cell towers?
There’s a GNSS receiver in virtually every smartphone manufactured. The GNSS chips are so cheap (a few dollars) compared to the functionality gained that it wouldn’t make sense not to design a GNSS receiver in a smartphone. Now, just because there’s a GNSS chip in each smartphone doesn’t mean it’s the only technology used for location. For example, Apple iOS uses multiple data sources to determine the location at any given time. It will use a combination of cellular triangulation, Wi-Fi IP address, and internal GNSS receiver and external GNSS.
5. Which applications do you see requiring RTK accuracy within the mass-market applications?
A couple of years ago at the GPS World Leadership Dinner at the ION GNSS conference in Nashville, Dr. Todd Humphreys of the University of Texas at Austin predicted that you’ll have RTK (real-time centimeter accuracy) capability on your smartphone by the year 2020. I agree with his prediction, and I think we’ll see inexpensive Bluetooth RTK “pucks” well before 2020, as I’ve written before.
Often, I get the question raised above. Who needs RTK on a mobile phone?
I can’t tell you any more than that in the early 1970s when GPS was first being conceived, not one could tell you what GPS would be used for today. I love the following quote from Steve Jobs: “People don’t know what they want until you show it to them.”
6. Since many devices are complete systems with GNSS inside, do you see the direction of the industry moving towards remote “add-ons” like Bluetooth receivers?
Bluetooth receivers are certainly trending, and it’s primarily driven by the explosion of powerful yet inexpensive tablets and smartphones in the past five years, starting with the iPad/iPhone, and now with Android devices and smartphones in general. People want to use their consumer devices in a professional capacity and some need high-precision GNSS receivers, so that’s driving the demand for “add-ons” like Bluetooth GNSS receivers, laser rangefinders, and more.
Unmanned Aerial Systems
Ok, let’s transition to some questions on UAS (such as UAV, drones).
1. Do you see the FAA allowing simple operations for very low altitude UAV-sensors?
It’s difficult to speculate what the FAA will implement, but I have to think, based on its past behavior, that the initial rules will be super-conservative with minimum requirements being that a licensed pilot will be required to operate the UAS in addition to strict equipment requirements.
What’s going to be interesting to observe is what the FAA will do about the hundreds (maybe thousands) of UAS operators who will attempt (or are attempting) to “fly under the radar” and skirt the FAA rules. We’ve seen the FAA attempt (sometimes successfully and sometimes not) to crack down on some UAS operators whom it believes are violating the rules, but there have only been a handful of those cases.
2. When do you think the FAA will release rules for commercial UAV users?
I wouldn’t be surprised if the FAA issued some guidelines in September 2015, but I seriously doubt they will publish the full set of rules by then.
By the way, I attended an interesting UAS presentation at the AEC Summit prior to the Esri UC. You can see my write-up of it here.
That’s it for now. I’ve got many more questions from the audience that I’ll address in upcoming newsletters. Stay tuned and feel free to email me directly at [email protected].
Like it or not, as a person who works with geospatial data, UAS (unmanned aerial systems such as drones and UAVs) are in your future. The upside of said technology for “quick and dirty” mapping is undeniable.
GNSS plays a key role with UAS, just like it plays a key role in classical photogrammetry. In fact, UAS may even push GNSS technology into areas where it hasn’t gone. For example, L1 RTK. I wrote about L1 RTK technology several years ago, and while several products attempted to exploit it, L1 RTK never was adopted in any significant numbers, primarily due to the short baseline, clear sky, and longer initialization requirements. However, UAS may change that because, by their nature, they work with short baselines, clear sky environments and require some setup time, at least enough for L1 RTK initialization.
However, before we get ahead of ourselves, the regulatory machine (the Federal Aviation Administration) must publish regulations that provide guidelines on the use of UAS for commercial operations. In June, amidst its recent enforcement actions, the FAA issued its first commercial authorization for mapping UAS over land in the U.S. The FAA issued a Certificate of Waiver or Authorization (CoA) to BP to conduct aerial surveys in Prudhoe Bay, Alaska. According to the FAA, the first flights took place on June 8 and used a AeroEnvironment 13.5 lb. Puma AE fixed-wing UAS with a nine-foot wingspan.
According to a Wall Street Journal article, AeroEnvironment spokesman Steve Gitlin said it took about a year and considerable financial investment to win FAA approval for the BP project. Curt Smith, a director in BP’s technology office, said that manned aircraft are sometimes less expensive per flight than the AeroVironment devices, but that the drones will gather far more data, enabling BP to operate “more effectively, more safely, and at a lower cost.”
The FAA announced that last summer that it issued restricted category type certificates to the Puma and Insitu’s Scan Eagle, another small UAS. The certificates were limited to aerial surveillance only over Arctic waters. The FAA recently modified the data sheet of the Puma’s restricted category type certificate to allow operations over land after AeroVironment showed that the Puma could perform such flights safely.
Texas A&M University Becomes Fourth Operational UAS Test Site
In further UAS news, the FAA announced on June 20 that Texas A&M University – Corpus Christi became the fourth of six UAS test sites to become operational. The FAA issued a CoA for the university to use an 85 lb AAAI RS-16 UAS with a ~13-foot wingspan. The other five UAS test sites are Griffiss (NY) International Airport, North Dakota Department of Commerce, State of Nevada, University of Alaska, and Virginia Polytechnic Institute and State University.
American Aerospace RS-16 UAS. 12’11” Wingspan. 85 lbs.
The FAA UAS Legal Stuff
Despite its setback when an NTSB administrative law judge ruled against the FAA in March 2013, the FAA sternly maintains its position that commercial operations of UAS in the U.S. are strictly prohibited without a CoA. In fact, just this week (June 23), the FAA issued a press release about a Federal Register Notice the FAA published of its interpretation of UAS rules for model aircraft in the FAA Modernization and Reform Act of 2012. In the Act, the Sec. 336 Special Rule for Model Aircraft reads:
SEC. 336. SPECIAL RULE FOR MODEL AIRCRAFT
(a) IN GENERAL.—Notwithstanding any other provision of law relating to the incorporation of unmanned aircraft systems into Federal Aviation Administration plans and policies, including this subtitle, the Administrator of the Federal Aviation Administration may not promulgate any rule or regulation regarding a model aircraft, or an aircraft being developed as a model aircraft, if—
(1) the aircraft is flown strictly for hobby or recreational use;
(2) the aircraft is operated in accordance with a community-based set of safety guidelines and within the programming of a nationwide community-based organization;
(3) the aircraft is limited to not more than 55 pounds unless otherwise certified through a design, construction, inspection, flight test, and operational safety program administered by a community-based organization;
(4) the aircraft is operated in a manner that does not interfere with and gives way to any manned aircraft; and
(5) when flown within 5 miles of an airport, the operator of the aircraft provides the airport operator and the airport air traffic control tower (when an air traffic facility is located at the airport) with prior notice of the operation (model aircraft operators flying from a permanent location within 5 miles of an airport should establish a mutually-agreed upon operating procedure with the airport operator and the airport air traffic control tower (when an air traffic facility is located at the airport)).
(b) STATUTORY CONSTRUCTION.—Nothing in this section shall be construed to limit the authority of the Administrator to pursue enforcement action against persons operating model aircraft who endanger the safety of the national airspace system.
(c) MODEL AIRCRAFT DEFINED.—In this section, the term ‘‘model aircraft’’ means an unmanned aircraft that is—
(1) capable of sustained flight in the atmosphere;
(2) flown within visual line of sight of the person operating
(3) the aircraft; and
(4) flown for hobby or recreational purposes.
You can read more (lots more) about the FAA’s interpretation of the Act here. You can submit a comment on the FAA’s interpretation of the Act here. The comment period ends July 25.
More FAA UAS Legal Stuff
On June 25, the FAA issued a press release announcing that seven aerial photo and video production companies requested regulatory exemptions from the FAA to operate UAS before the FAA UAS rule-making is finalized. According to the FAA, “the Motion Picture Association of America facilitated the exemption requests on behalf of their membership. The firms that filed the petitions are all independent aerial cinematography professionals who collectively developed the exemption requests as a requirement to satisfy the safety and public interest concerns of the FAA, MPAA, and the public at large.”
From the FAA press release, “The FAA published a brief summary of the petition from Astraeus Aerial in the Federal Register. The agency opted to ask for comments only on the Astraeus petition because that company’s request came in first, and the petitions from the other six companies ask for identical exemptions.”
Interestingly enough, the FAA is soliciting public comment before it makes a ruling on the MPAA request, clearly highlighting the tremendous pressure the FAA is under to integrate commercial use of UAS in the U.S.
More Commercial Use of UAS Despite what the FAA Says
The NTSB ruling against the FAA fueled the commercial UAS fire and certainly gave commercial UAS operators, operating illegally according to the FAA, more confidence that the FAA may not pursue them. That might be the case in an incident publicized last week in Seattle, Washington, where a woman called police after she saw a UAS buzzing around outside of her apartment building, believing it was spying on her 26th-floor apartment. The Portland, Oregon-based UAS operator, Skyris Imaging, was interviewed by Portland’s KATU news.
“It was not our intent to view anything other than the views from a 20-story office building that will be built across the street,” said Skyris’s Joe Vaughn. Vaughn told KATU that a Seattle-based developer hired Vaughn’s company to use one of his drones equipped with cameras to take photos of the view for a new 20-story building.
Vaughn told KATU that his company has a fleet of six drones he says he responsibly flies. He told KATU that his company has strict guidelines to never fly for a third party, over crowds, above 400 feet, or beyond visual range. Click below to view the KATU interview.
Live Webinar at the Esri International User Conference
In a GPS World first, we’ll be producing a live webinar from the Esri International User Conference on Thursday, July 17, @ 10 a.m. Pacific Time in the exhibit hall at the San Diego Convention Center. Of course, the webinar will be focused on one of the hottest topics: high-precision mobile GIS. It will cover high-precision GNSS on mobile devices, from iPads to Android tablets to smartphones.
Tune in or join us live from the exhibit hall floor! Register here.
I’ve written this many, many times in the past eight years that I’ve written for GPS World magazine, but I have to write it again — this is an exciting time for GNSS!
For me, high-precision GNSS is particularly exciting. I’ve been traveling like crazy, and involved in a number of really fun projects that incorporate high-precision GNSS. Of course, on these various projects I usually incorporate many types of technologies that support GNSS, such as computing, communications, power, and mechanical.
Along those lines, I find myself more and more frequently setting up custom RTK bases for companies because they’re getting cheaper and cheaper, regardless of the fact that there are an increasing number of publicly available real-time kinematic (RTK) base stations. Setting one up doesn’t just involve plugging power into a RTK base receiver and hitting the on/off switch. As I mentioned above, setting up an RTK base involves several different types of technologies. Sometimes, I set up a desktop computer next to the RTK base to act as a server to manage the RTK GNSS base and communications (both network and RTK communications) equipment.
In your mind, when you think of a desktop computer, you probably envision something that occupies 2-3 square feet (~one square meter) of desktop space, along with a keyboard and monitor. So, a consideration when deploying an RTK base is finding desk space somewhere in the user’s office to accommodate the desktop PC and other equipment.
Recently, I took a different approach. I found (actually, my client found) an incredibly small computer to be our server. Just as high-precision GNSS receivers are getting smaller and smaller, so are computers. The Intel Mini-PC measures 4 inches x 4 inches (10.16 x 10.16 centimeters) and has no hard disk. It uses solid-state drive (SSD) memory for storage. SSD technology is still somewhat expensive ($1+ per gigabyte), but it is small compared to a classical disk drive, and doesn’t have any moving parts. Furthermore, the Mini-PC has ethernet ports: when we connect a network cable to it, we could access the Mini-PC via Remote Desktop. That meant we didn’t need a keyboard or monitor. The Mini-PC had all the power we needed, and we could load any sort of control software on it because it runs the standard Windows 7 (or 8) operating system. Last but not least, the Mini-PC costs only $149. However, you need to add memory, SSD, and so on, so the real cost is ~$400 depending on your configuration. While not cheaper than similarly performing “boxes” available, it’s certainly one of the smallest.
Intel Mini-PC Measuring 4″ x 4″
In fact, it’s so small that we stuffed it inside a 14” x 12” electronics enclosure box along with the RTK GNSS base and other network equipment, and hung it out of sight on a closet wall. No desktop space required. Without stretching your mind much, you can see where desktop computing is headed; very small and inexpensive enough to be dedicated to specific tasks. Think about this and then consider the Internet of Things concept. It’s very exciting.
More RTK on Mobile Devices
Later this week I’ll be experimenting with RTK on mobile devices with the CRTN (California Real Time Network), a collection of 330 RTK bases located throughout California. I’ll be using a Panasonic ToughPad running ArcGIS Mobile (and maybe ArcPad) and an iPad using a cloud-based mapping service. The latter is particularly interesting because there are lots of cloud-based GIS data collection apps on the market and under development. Specifically, there’s a lot of subscription-based, cloud-based software. The challenge is that they are even less geodesy-intelligent than the “professional grade” GIS data collection software on the market. In other words, they read coordinates (NMEA format) from GNSS receivers and feed them directly into their app. No datum transformations are provided, neither horizontal nor vertical. That’s going to be a problem.
FCC Levies Record Fine Against Chinese Supplier of GPS and Mobile Phone Jammers
The Federal Communications Commission (FCC) announced that it plans to issue the largest fine in its history against C.T.S. Technology Co., Limited, a Chinese electronics manufacturer and online retailer, for allegedly marketing 285 models of signal jamming devices to U.S. consumers for more than two years. The FCC plans to levy a $34.9 million fine against CTS. The FCC reported that CTS sold 10 high-powered signal jammers to undercover FCC personnel.
The FCC is asking people to report the sale or use of an illegal jammer by contacting the FCC Enforcement Bureau through the FCC online complaint portal, or by calling 1-888-CALL-FCC (or 1-888-225-5322). To voluntarily relinquish a signal jammer, e-mail [email protected]. Additional information, including the FCC Consumer Alert on the jamming prohibitions and the FCC Enforcement Advisory to retailers regarding the marketing of illegal signal jammers, is available at www.fcc.gov/jammers.
You can view the FCC enforcement action against C.T.S. here.
Satellite Launch Pads are Warming Up
Two GPS Block IIF satellites, one launched in February and one launched in May, were set healthy in the past three weeks, making a total of six IIF GPS satellites in orbit broadcasting on three civil frequencies; L1, L2C, L5.
On July 31, the seventh GPS IIF satellite is scheduled for launch, followed by an October 2014 scheduled launch of the eighth GPS IIF satellite.
On June 14, Russia launched a GLONASS-M satellite. It has not been set healthy yet. There are a total of 24 healthy GLONASS satellites in orbit. You can check the current status of GLONASS satellites here.
On August 22, Europe is scheduled to launch the first two Galileo FOC (Full Operational Capability) satellites to add to the four test satellites in orbit that will be integrated into the final operational constellation. A second pair of Galileo satellites is scheduled for launch in November 2014. These are projected dates and subject to slippage.
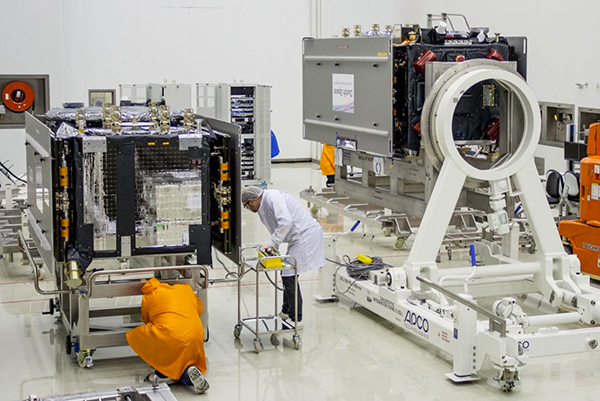
Galileo Satellites in the Clean Room
Live Webinar from the Esri International User Conference on July 17
In a GPS World first, we’ll be producing a live Webinar from the Esri International User Conference next month on Thursday, July 17 @ 10 am Pacific Time in the exhibit hall at the San Diego Convention Center. Of course, the webinar will be focus on one of the hottest topics, high-precision GNSS on mobile devices; from iPads to Android tablets to smartphones.
Tune in or join us live from the exhibit hall floor! Register here.
There has been a lot of GNSS-related news in the past month, so I thought I’d do a quick review of the importance (and possibly unimportance), of news you may have heard about.
Just because some GPS satellites weren’t broadcasting CNAV on L2C and L5 doesn’t mean your receiver isn’t using L2C or L5. On the contrary, if your receiver was designed to handle L2C and L5, it’s likely already been using them. The CNAV is just the message being transmitted on the L2C and L5 carrier along with the code. If your receiver tracks L2C and L5, it’s likely already using the carrier (phase) observations. However, even then there are only a limited number of satellites broadcasting L2C and L5 carriers. Specifically, there are 11 satellites broadcasting L2C and four broadcasting L5, meaning that your receiver is roughly tracking one L5 satellite at any one time during the day and several satellites broadcasting L2C.
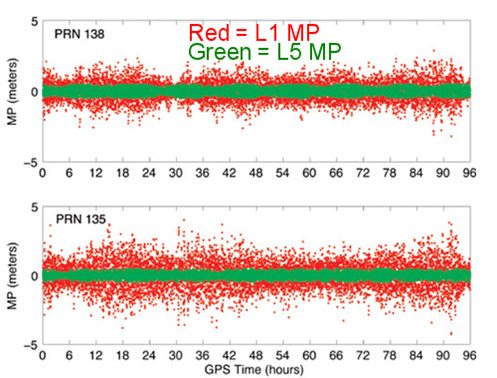
The C/A code (NAV) message on L1 that your receiver already uses today is good enough. Your receiver doesn’t need the CNAV message on L2C or L5 to utilize the L2C or L5 carrier observations. That’s not to say there’s no benefit to CNAV on L2C and L5, but for RTK or post-processing, the value is largely in the carrier observations. In the future, when L2C and L5 are fully deployed (or near fully deployed), the L5 CNAV does have some distinct advantages, but that’s a few years down the road. To give you an idea of the benefit of L5 when there are enough GPS satellites broadcasting L5 , take a look at the following illustration published by Dr. Richard Langley from the University of New Brunswick comparing the reduction of code multipath on L1 and L5 of two WAAS GEO satellites.
Reduction of code multipath using L1 and L5 on WAAS GEO Richard B. Langley, Hyunho Rho
For the full text of the Langley/Rho article on L5 and WAAS that appeared in the May 2009 issue of GPS World magazine, click here.
Second GPS IIF Satellite of 2014 Launched May 16
On May 16, the second GPS satellite of 2014 was launched successfully from Cape Canaveral in Florida. It was the sixth model IIF GPS satellite, of which 12 are being built, before transitioning to the next-generation model GPS satellite named GPS III. It began transmitting on May 21, 2014, but is not yet set healthy.
Photo credit: Spaceflight Now.
The GPS model IIF satellite broadcasts the legacy GPS signals as well as the new civilian L2C and L5 signals.
Normally, a launched GPS satellite is set healthy (and automatically begin being used by your GPS receiver) within 30 days of launch, sometimes much sooner. However, the IIF GPS satellite launched in February of this year still hasn’t been set healthy, the reason reportedly being an extended navigation test reported here.
A third GPS IIF satellite is scheduled for launch this year on July 31.
During the post-launch interview last Friday, the Air Force stated that the remaining GPS IIF satellites (six) will be launched by the end of 2016. From previous conversations I’ve had with Air Force officials, they’ve stated that there could be an overlap between IIF and III satellite launches. In other words, the first GPS III satellite could be launched before all IIFs have been launched.
“Since March 15, 2014, the Air Force has been conducting functional checkout on a GPS satellite, designated Space Vehicle Number (SVN) 64. SVN-64 broadcasts a data message that clearly indicates SVN-64 is unusable for navigation. Nevertheless, the U.S. government has confirmed that certain GPS receivers are using data from SVN-64, in violation of GPS interface specifications, resulting in outages or corrupted, inaccurate position calculations.”
CGSIC reports that the GPS continues to operate and is fully functional.
In Australia, faulty GPS receivers on roughly 1,000 fleet vehicles caused an apparent GPS “outage” about a month ago.
The U.S. Air Force GPS Operations Center reported that in mid-May tests, “PRN 30 [was] broadcasting almanac datasets that do not reflect constellation changes that occurred since it was last uploaded with navigation message data. [. . . ] The utilization of these almanacs in a manner that regards the time of week, but neglects or mishandles the week number (effectively executing as if the current week number is the week number associated with these almanac parameters), will result in an increasing error in visibility determination and other almanac based estimations (elevation/azimuth, Doppler shift, SV clock offset from GPS time, etc) as the dataset’s actual week offset from the current week increases.”
First Two FOC Galileo Satellites Arrive in French Guiana for Launch Preparation
The first two Fully Operational Capability (FOC) Galileo satellites arrived in the French Guiana in preparation for launch this summer. When launched into orbit, they will join four IOV (In-Orbit Validation) Galileo satellites launched in 2011 and 2012.
The first FOC satellite launch may signal the beginning of Galileo “production” launches of one pair per quarter. Giuliano Gatti, Head of ESA’s Galileo Space Segment Procurement Office, stated that “A steady stream of satellites is foreseen, coming from OHB to ESTEC for acceptance testing and then on to French Guiana. Thanks to the preparatory work done with these pioneer satellites, future Galileos will be processed more rapidly.”
OHB is the prime contractor for a total of 22 FOC Galileo satellites. Those are in addition to the four IOV Galileo satellites.
The two Galileo satellites in the clean room.
Massive GLONASS System Failure
On April 1, the entire GLONASS system was inoperable for about 11 hours. A second, partial failure involving eight GLONASS satellites occurred on April 14 and lasted for about 30 minutes. There were many reports of RTK receivers not operating properly, and some manufacturers instructed their users to “turn off” GLONASS tracking capability on their receivers.
Subsequently, mathematical mistakes were blamed for the failures. The head of the Russian Space Agency, Oleg Ostapenko, stated that the problem would be fully resolved by mid-May and that there is almost no chance of a similar failure happening again.
Some news media are reporting that such an action by Russia would have an effect on GPS.
It would not.
What they’re talking about is discontinuing operations of some or all IGS (International GNSS Service) GPS stations in Russia. Those stations have nothing to do with the operation of GPS. They are simply CORS (Continually Operating Reference Stations). If anything, it will hurt Russian scientists (and scientists from other countries) more than anyone else.
Russian Rocket Launch Failure
Last week, Russia suffered its fifth rocket launch crash in the past four years. Fortunately for the GNSS user community, the rocket was not carrying any GLONASS satellites.
However, it raises serious concerns about the reliability of Russian rockets and launch procedures. Europe’s Galileo satellites are launched using Russian Soyuz rockets at Europe’s space port in French Guiana.
Last week was spring break (for high school and college) for my kids. We decided to drive to San Francisco and the surrounding area to do a little sightseeing. It’s a beautiful place. This is a view from our 3rd floor room in the hotel, looking over the bay.
Of course, while traveling, I usually manage to work in some GNSS activities.
The first stop was Autodesk, the makers of AutoCAD and other engineering, design and visualization software in downtown San Francisco. AutoCAD occupies 100,000+ square feet at One Market St. in downtown San Francisco and another 20,000+ square feet at Pier 9 right on the Bay. How anyone gets work done with an office on a San Francisco Pier is beyond me. It’s buzzing with people and activity, including a shuttle to the famous Alcatraz Prison, which we enjoyed.
The Autodesk meeting is deserving of an article in itself, but I’ll keep it short with bullet points for the purposes of this article:
AutoCAD 2014 includes a datum/coordinate system library for mapping/surveying users. This is new in AutoCAD.
Infraworks (introduced last year) was built from the ground up with a new workflow for engineers and planners (and surveyors). Most people have never heard of it. It can do things that AutoCAD can’t, such as managing surveying data for large-scale projects. Think BIM (Building Information Modeling).
Model Builder (just introduced), is a tool to build quick and dirty 3D visualizations using data from Autodesk’s cloud service.
Autodesk 123. This is a really cool free app you can use to create 3D models using your own images. The images can come from smartphone pictures or images you already have. It’s a really cool app.
Photogrammetry Chair in the Autodesk Gallery at One Market St. in downtown San Francisco.
AutoCAD 360 (formerly AutoCAD WS). First of all, any Autodesk product with 360 in the name is a cloud app, whether it’s mobile or desktop. I’ll focus on the mobile apps. There are two AutoCAD 360 mobile apps: one for Android and one for iOS. The mobile apps are free tools that allow you to take AutoCAD drawings in the field. There are also Pro versions available on a subscription basis.
Screenshot of AutoCAD 360 on the Apple iPad.
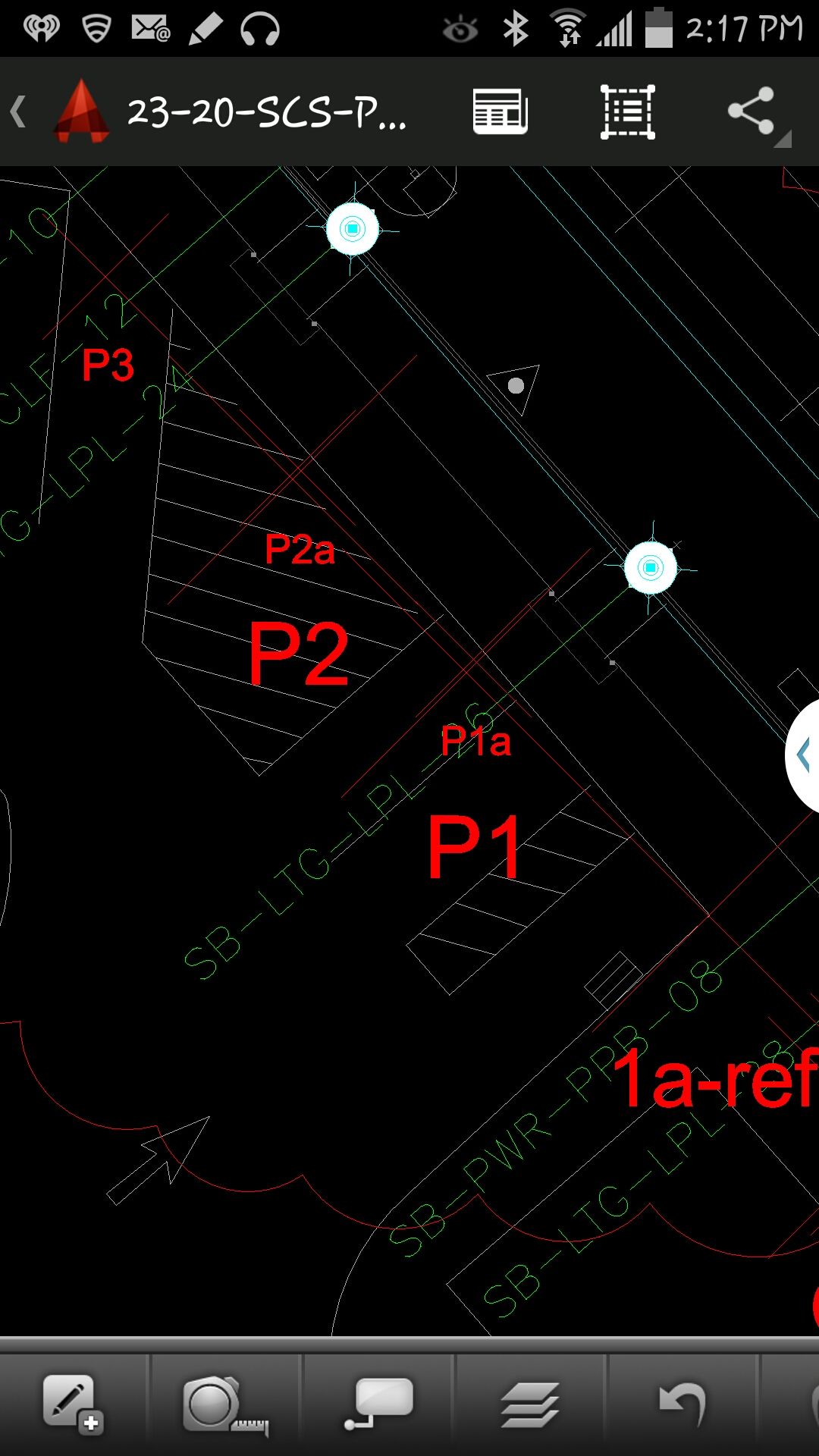
Last week, I had a chance to use AutoCAD 360 in the field with RTK. It was a last-minute exercise that I hadn’t planned on, so my expectations were set so that even if I couldn’t get it to work, at least it would be a solid learning experience.
The goal was to receive 1-2 cm RTK GNSS positions on an Android smartphone running AutoCAD 360 using a public (free) RTK base station. I knew I could access the free RTK base via PBO real-time streaming because I’ve done that before. However, I didn’t know, or have experience in two areas:
Accessing RTK base data via NTRIP on an Android device.
The ability of AutoCAD 360 mobile app to consume GPS data.
For the Android device, we used a Samsung Galaxy Note. It’s a smartphone, but also a tablet with a 5.7-inch color touchscreen.
Samsung Galaxy Note with a 5.7-inch color touchscreen.
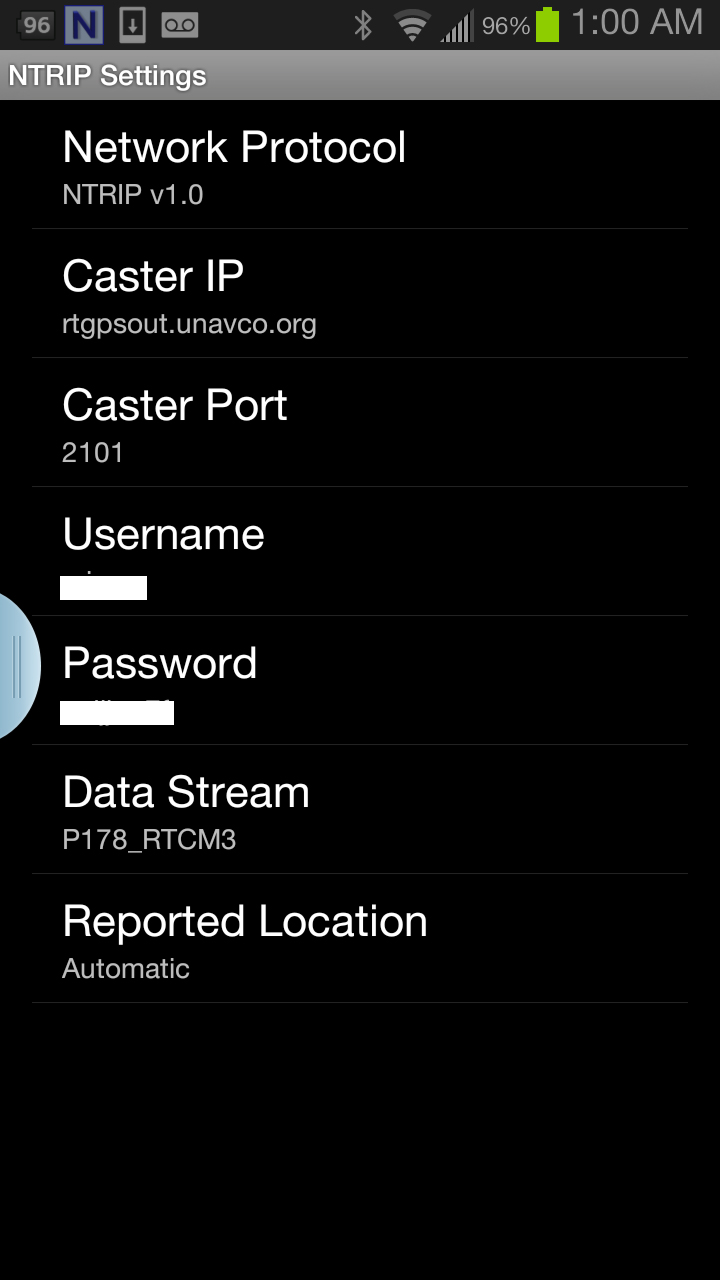
The first challenge was the Android utility software needed to access the RTK base. NTRIP (Networked Transport of RTCM via Internet Protocol). As I’ve written in previous articles, there are lots of free RTK base stations (330+) in California. To access them, all you need is internet connectivity and an NTRIP program to manage the connection to the RTK base. For Windows and Windows Mobile, there are several free NTRIP software programs. For Android, it’s limited (but growing). I found a free Android NTRIP utility on the Google Play store. It’s very easy to install and set up. If you have your RTK base credentials (IP address, port#, login, password), if you have a Bluetooth RTK receiver, you can install the program and be running RTK within a few minutes.
Android NTRIP Utility (Lefebure Design)
Once I entered the RTK login credentials, I was presented with a list of RTK bases. The list of PBO RTK bases are all single-baseline RTK bases (not networked) so I needed to select the closest one to the project site. In this case, it was P178 (see the screen shot above). It was about five miles from the project site. At this point, I can see the RTK base data streaming on the Samsung Note tablet. I didn’t mention before, but I had already Bluetoothed the Samsung to a small RTK GNSS receiver. Once the RTK base data starts streaming, the RTK GNSS receiver goes into FLOAT mode and heading for FIX (1-2cm precision).
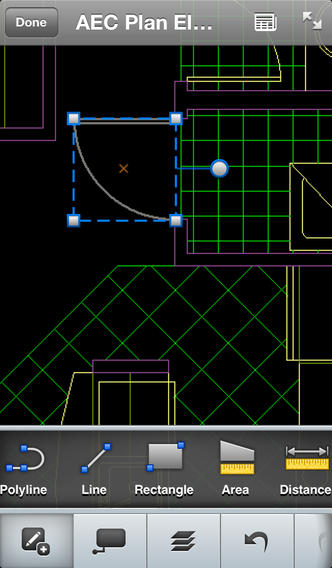
At that point, we (I wasn’t operating AutoCAD 360 on the Samsung) started AutoCAD 360 on the Samsung Note tablet and loaded a drawing that we’d planned to use. Following are a couple of screen shots from our exercise.
AutoCAD 360 running on a Samsung Note Tablet/smartphoneAutoCAD 360 running on a Samsung Note Tablet/smartphone.
It took a minute to figure out how to”turn on” GPS in AutoCAD 360 (we were all newbies), but once we did, our position showed up on the drawing where we expected it. By this time, we were getting an RTK FIX position from the RTK GNSS receiver. We were getting 1-2 cm precision in a native AutoCAD drawing, in real-time, in the field, on an Android smartphone. I was impressed.
We were ready to start our accuracy testing. Our accuracy testing consisted of two parts:
1. To test precision, take RTK shots on two points and measure the distance between the two with a tape measure. We did this several times.
Lt-1 and Lt-2 were on top of a platform with no substantial obstructions.
Lastly, we took a shot underneath a platform with greater than 50% of the skyview obstructed. It didn’t hold RTK in that environment and I didn’t expect it to. The precision was 5 feet (DGPS).
2. The second test was to test accuracy by taking an RTK shot on a survey marker that had published State Plane Coordinates in NAD83/2007 epoch 2007.0
After recording an RTK FIX shot on the marker (albeit I was holding the antenna so I expected a little slop), we compared our result to the survey marker coordinates. Not good…3.0 feet difference.
My first suspicion was that the RTK base was referenced to ITRF, so there would be significant difference between the two coordinate values. No dice. I adjusted the RTK GNSS coordinate to NAD83/2007 (2007.0) assuming it was referenced to ITRF08. The adjusted coordinate was further than the original (6.95 feet). That wasn’t the problem.
My second thought was to double-check what the PBO folks used for a reference position for there RTK bases. They confirmed ITRF08 current epoch. However, after talking to a few people familiar with PBO sites (RTK Network operator and Mark Silver), they suggested to run an OPUS solution on the PBO RTK base and compare it to the reference coordinate being used by the PBO RTK base. Sure enough, there’s a 6.40 feet difference between the 24 hour OPUS ITRF08 coordinate and the ITRF08 reference coordinate being used by the P178 RTK base.
It still doesn’t reconcile the difference we saw between the RTK GNSS coordinate and the survey mark, but I’m still trying to confirm which epoch date the PBO RTK base is using. In California, tectonic plate movement is significant. In that area, the ground is moving 1.7 cm north and 3.4 cm west each year, so the epoch date of the coordinate is significant, especially if the epoch date is 1997.0 or 2002.0. However, that doesn’t prevent you from using RTK Bases like P178 and “localizing” to NAD83/2007 or whichever datum your data is referenced to.
I recently was involved in a project outside of the United States. Part of the project involved setting up a couple of RTK base stations. Of course, I wanted the antenna surveyed with reasonable accuracy with respect to ITRF. Even though supporting OPUS outside of the U.S. is out of the scope of the NGS mission (I assume), it works the same outside of the U.S. as it does within the U.S. Ok, somewhat the same.
As you imagine, the network of GPS reference stations outside of the U.S. is not nearly as dense as within the U.S., so you can remove OPUS-RS from the discussion immediately. OPUS-RS only requires a minimum of 15 minutes of data, but there must be three GPS reference stations within 250 km that form a polygon around your occupation point. Obviously, in many parts of the world, you aren’t going to be in a location that meets those specifications. Those requirements can be difficult to meet even in the United States. I recall a project on the West Coast where I had plenty of GPS reference stations within 250 km, but because I was near the Pacific Ocean, I wasn’t within the polygon of three GPS reference stations that OPUS-RS could find.
Back to my ex-U.S. project. With OPUS-RS being out of the consideration, OPUS-S was my choice. What you may not know is that OPUS doesn’t just look at CORS inside the U.S. when post-processing GPS data. It also looks at IGS Stations, which are located all over the world. Granted, I knew the distance to the GPS reference stations would be long, perhaps many hundreds of kilometers to each one, so I planned for long occupation times. This was easy because I was setting up high-quality (choke-ring) permanent antennas on building roofs. I set the GPS receiver to log data overnight at 15-second intervals.
I apologize ahead of time for needing to hide some of the data in order to preserve the privacy of my client, but you can try this same exercise on data you collect, or grab data from an IGS station and chop it into smaller pieces to process.
I logged data for about seven hours. Of course, I had ants in my pants, so I didn’t wait for the rapid orbits (used ultra-rapid), but knew I could reprocess at a later date and use rapid and precise orbits. Here’s what I got:
SOFTWARE: page5 1209.04 master51.pl 072313 START: 2014/01/30 13:49:00
EPHEMERIS: igu17774.eph [ultra-rapid] STOP: 2014/01/30 20:59:30
NAV FILE: brdc0300.14n OBS USED: 3219 / 10519 : 31%
ANT NAME: NONE NONE # FIXED AMB: 39 / 56 : 70%
ARP HEIGHT: 0.0001 OVERALL RMS: 0.015(m)
REF FRAME: IGS08 (EPOCH:2014.0814)
X: xxxxxxx.203(m) 0.396(m)
Y: xxxxxxx.943(m) 0.287(m)
Z: xxxxxxx.554(m) 0.173(m)
LAT: xx xx xx.xxxxx 0.122(m)
E LON: xxx xx xx.xxxxx 0.470(m)
W LON: xx xx xx.xxxxx 0.470(m)
EL HGT: 387.047(m) 0.212(m)
BASE STATIONS USED
PID DISTANCE(m)
xxxxxx 3125832.0
xxxxxx 3743350.2
xxxxxx 3756756.5
Not bad, considering the monster baselines. Yes, that’s 3+ million meters.
I ran the same data set later with better orbits available, as well as more GPS reference data became available.
Wow, the baselines sure improved, and that’s reflected in the solution. That’s because the GPS reference data isn’t immediately accessible from some IGS Stations. In the interest of privacy, I erased the Lat/Lon but kept the elevation. You can see the elevation difference between the two is about 20 cm. I assume it’s an improvement. For confirmation, I decided to run the same dataset through Australia’s AUSPOS online processing service.
X: xxxxxx3.390(m) 0.008(m)
Y: xxxxxx1.676(m) 0.006(m)
Z: xxxxxx9.405(m) 0022(m)
LAT: xxx xx xx.xxxxx
E LON: xxx xx xx.xxxxx
W LON: xxx xx xx.xxxxx
EL HGT: 386.822(m)
The results were comparable to the OPUS solution, differing by 0.7cm in X, 0.08cm in Y and 2.9cm in Z.
AUSPOS used substantially more GPS reference stations (14 total) than OPUS:
STATION, Positional uncertainties (95%) for X, Y, Z (in meters)
Baseline distances ranged from 341 km to 3,700 km.
So, do I believe the OPUS solution or AUSPOS solution? I split the difference at the time. However, I set up the GPS reference stations in such a way that I can access them remotely and log data at any time from my laptop computer, so I’m running a series of eight-hour (or whatever in convenient) occupations and processing them through both services. So yes, OPUS is an international service (shsh, don’t let the bureaucrats and politicians know).
Last month, I started off 2014 with a bang by listing all the public RTK bases available in the United States, most of them being free. I received a lot of positive feedback and some enlightenment. For example, I didn’t know that in California, there are more than 330 RTK public base stations accessible by anyone for free via the California Real Time Network website at the University of California at San Diego! What a tremendous resource for California surveyors and GISers.
Remember that RTK will give you 1-2 cm accuracy horizontally and twice that for vertical. If you know that and also know that there are 330 free RTK bases in California, why would anyone use post-processing for high-precision (e.g., sub-foot) GIS data collection? RTK technology used to be reserved for people who could spend tens of thousands of dollars on a GNSS receiver. Not any longer. RTK receivers are available for under $7,000, and you don’t need to invest in a RTK base unit if you’re in range of a public one on my list (or a commercial one not on my list).
I’m pretty sure it was Charlie Trimble (founder of Trimble Navigation) who said “accuracy is addictive.” It sure is. Once you experience real-time centimeter-level accuracy (RTK) in the field, you won’t be satisfied with anything less, and neither will your GIS.
Keeping on the subject of RTK, 2014 might be the year of inexpensive RTK receivers. Whereas today you can find L1/L2 GNSS RTK receivers (in the U.S.) ranging from US$6,500 to US$25,000, there are rumors that some manufacturers are going to break through the US$6,500 price point.
This is in line with the prediction I made a few years ago, but for a different reason. In 2010, I wrote that RTK receivers would become very inexpensive due to the new L5 signal being introduced, which would increase competition among GNSS receiver designers. I speculated that with more competition, the selling prices would significantly decline. Well, we are still without a usable L5 signal (although making progress) due to the slow deployment of modernized GPS satellites and the delay in Europe’s Galileo system, but we are still seeing a steady decline in the price of RTK receivers. Why is this?
Even though there are a limited number of designers of RTK GNSS receivers, an increasing number of companies are buying RTK GNSS boards from these designers and making their own finished RTK GNSS receivers that look and perform very similar to receivers available today, for a fraction of the price. This is especially true in China, where there are several manufacturers buying RTK GNSS receiver boards from Trimble, Novatel, Hemisphere et al, making their own finished products and selling them. They were initially selling to very price-sensitive markets such as Africa, but now you see them setting up distribution in North America.
This “OEM Syndrome” has put tremendous price pressure on existing brand-name RTK GNSS receivers as the Chinese-equivalent products are priced as little as 25% of the equivalent brand-name products. Of course, this drives the leading brand-name companies crazy. They are forced to either drop their price or otherwise convince buyers that their products are worth a significant premium. During these times of tight capital budgets, it’s increasingly difficult to do the latter. When enough satellites are in orbit broadcasting the L5 signal, you’ll really see this effect gain traction because there will be a lot more RTK GNSS designs to choose from, and the result will be better quality. More competition always results in better product quality and performance.
The fact is that RTK receivers are moving towards becoming a commodity. As much as your local salesperson would like you to think they are selling a better RTK GNSS receiver, the technology gap between leading-brand designers and others is closing and probably unnoticeable to most of you. The major differences end up being the quality and reliability of the finished product (system design, battery, display, antenna integration, power supply, etc.). Having a great RTK GNSS receiver board inside is useless if the system design is unreliable.
More Real-time PPP Competition
For the longest time, it’s only been OmniStar (now owned by Trimble) and Starfire (owned by Deere & Co.) in the L-band high-precision correction game. Then, last year, the International GNSS Service announced its free decimeter real-time PPP service. The catch is that receiver designers must incorporate IGS firmware to make use of the signal and…it’s only an Internet-based service (no satellite communications).
In the past couple of months, Hexagon (which owns both Leica and Novatel), made a bid for Veripos. Veripos operates an L-band GNSS correction service for the oil and gas industry. Last year, TerraStar, a subsidiary of Veripos, announced its new decimeter service that is very similar to OmniStar and Starfire. It uses satellite communications for a data link. Altus Positioning Systems incorporated the TerraStar service into its receivers. Hexagon is very close to closing the deal with Veripos and just last week announced a partnership with competitor Topcon Positioning Systems. The result is that Leica and Topcon both will start offering high-precision L-band GNSS correction services with their receivers. If you’re an L-band decimeter user, this is probably good news for you. More competition = higher quality and lower price.
First of all, let me wish a Happy New Year to all my friends around the world and a prosperous 2014. I’m as excited as I’ve ever been about GNSS technology.
If I may ask for forgiveness from you if you live outside of the United States, I’d like to start out answering a question I’ve been asked about for several years. The question is:
Do you have a list of free sources of RTK base station data in the United States?
What is RTK? In a nutshell, RTK is 1-2cm real-time positioning. Some refer to it as “survey-grade”. Historically, RTK users have been required to setup and maintain their own RTK base station. This is expensive and inconvenient. Many federal, state and local government agencies have setup RTK bases to increase RTK efficiency for their employees. Many of them make the RTK base data available to the public for free or for a nominal cost. If you work in an area that offers one, all you need is internet access in the field and a RTK-capable GPS L1/L2 receiver.
I’ve tried to keep track of the public RTK bases I know of, so I’ll list them here. If I’ve missed one you know of, please feel free to send me a quick email at [email protected] or list it in the Comments section at the end of this article. Furthermore, if you live outside of the U.S., I’d love to hear from you if you know of a source of free RTK base data.
Please note that in the following list there are four types of RTK bases:
I’ve used an RTK rover on all three of these services. Each of them has several mount points supporting different data formats. I typically use RTCM3 format because it’s an open standard and supported by all services I’ve used. For the Leica Spider network, you’ll be presented a choice of iMAX or MAX. Choose iMAX if you’re not running a Leica rover.
To use any of the services, you’ll need Internet connectivity. In the past, I’ve accomplished this in a few ways:
SIM card inside a data collector.
MiFi device.
Wi-Fi from a work vehicle.
You can also use a commercial RTK Bridge or Repeater such as Intuicom or Base-n-ABox. Or you can create your own RTK bridge system with a notebook computer that has internet access.
No matter how you do it, you’ll need a reliable Internet connection (speed is not important).
You’ll also need some sort of NTRIP software utility. Several data collector software packages have this built-in. For software like ArcPad, DigiTerra, gvSIG, etc. that don’t have it built-in, there are some freeware utilities on the market that run on Windows and Windows Mobile and Android (for example, SXRTN or Lefebure) that handle the NTRIP tasks in the background.
Following is a list of RTK bases in each U.S. state, along with the associated website. Please note that I only list the public (government-operated) services. Also note that while most are free, some of the public operators charge a user fee. At one point or another, I’ve used a fair number of these in various states. Once you’ve used one of each (Trimble, Leica, PBO), the rest are pretty much the same.
The difference between the Trimble and Leica networks and PBO is that the Trimble and Leica networks provide a network solution that utilizes several RTK base stations in the computation. Distance-dependent errors are reasonably modeled so the user can be farther from individual RTK bases. The PBO RTK bases provide a single baseline (like everyone used to use before RTK networks were invented) so the further you are from the RTK base, the more error is introduced into the solution (roughly 1 cm + 1 ppm).
Lastly, there are a number of commercial RTK networks in most of the states listed. I’ll save that list for another day. Again, these are just the publicly run RTK bases.
As the end of the year approaches, I’d like to reflect on 2013. One of the new features of the GPSWorld website allows me to access webpage statistics so I can understand which articles and news items were “hot.” Following is a list of GPS World magazine’s hot topics for 2013 with some commentary from me.
While it seems everyone is conducting webinars today, GPSWorld was a pioneer in offering technical webinars more than six years ago, and they continue to be very popular today. Three of the latest webinars are:
Detect and Locate GPS Jamming
Unmanned Aircraft Navigation
What’s the Latest & Greatest? GNSS Products for 2014 and Beyond
As a side note, I’m trying to talk the GPSWorld publishers into allowing me to host a bi-monthly or monthly 60-minute radio show hosted by myself and featuring various GNSS industry guests. The show would be an informal, roundtable discussion about current events related to high-precision GNSS and similar technology. It would likely be broadcast live over the Internet as well as recorded in MP3 format so you could listen to it using your smartphone or music device at a time convenient to you. Please send me a quick email if you think this is something you’d be interested in listening to.
I wrote this article in March 2013 discussing the myriad of new RTK receivers recently introduced. Since the article was written, even more have been introduced! Smaller, lighter and cheaper is where RTK is headed. The fact that this article was GPSWorld’s second most visited web page in 2013 speaks volumes of the growing interest in centimeter-level, real-time positioning (RTK).
Just recently, my friends at the University of Texas at Austin (UT) took RTK where it hasn’t been before…on a smartphone.
Dr. Todd Humphreys and his graduate assistants, including Ph.D. student Ken Pesyna, are part of the UT Radionavigation Laboratory. This team has been exploring, among other things, the feasibility of implementing RTK technology on smartphones. If you recall, in 2012 at the GPSWorld dinner during the Institute of Navigation (ION) GNSS Conference in Nashville, Dr. Humphreys proclaimed that RTK technology will be readily available on smartphones and tablets by the year 2020.
Well, Dr. Humphreys and his team are doing their part to realize this vision. Just a few short weeks ago, he reported that they have enjoyed some initial success.
However, before I present the details, I’ve been reminded several times over the years that smartphone GNSS chipsets aren’t the problem. In fact, two of the key GNSS engineers on the team (Broadcom) that designed the GNSS chipset used in the Apple iPhone, Dr. Frank Van Diggelen and Charlie Abraham, used to work for Ashtech. They know RTK.
The challenge with implementing RTK in smartphones is the antenna, not the GNSS chipset.
“The smartphone GNSS antenna is nothing more than a cleverly-designed wire trace, as are all smartphone GNSS antennas,” said Dr. Humphreys. “Some have joked that you could do better with a paperclip, and that’s probably not far from the truth.”
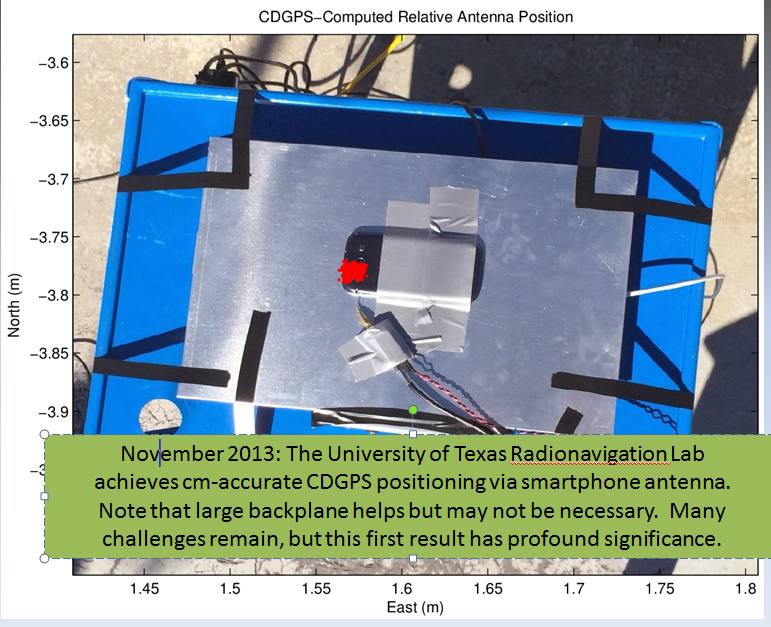
Nevertheless, just a few weeks ago Dr. Humphreys and his team at UT were able to use a standard smartphone antenna (Samsung Galaxy SIII) to achieve an RTK solution. To his knowledge, this is the first time a successful RTK solution has been derived using an off-the-shelf smartphone antenna.
Source: University of Texas at Austin
Ken Pesyna added that RTK initialization took a little under seven minutes using seven satellites. He added that with 10 satellites in view he’s seen RTK initialization drop to about two minutes. Mind you, this is GPS L1-only. Certainly, the addition of L2, GLONASS would further reduce initialization times, not to mention BDS, Galileo, etc.
So, RTK in smartphones next year? Not so fast.
“Many challenges remain”, said Dr. Humphreys, “and in some senses we are cheating (big backplane, good clock). Nonetheless, this is a huge step forward that presages great disruption.”
He added, “We were astonished to find that we could track L2C signals through the smartphone antenna. We didn’t exploit the L2C signals in our solution, but we could have, as the L2C carrier we recovered was quite clean.”
Not far behind the RTK article, in web hits, was the article I co-wrote with Mark Silver on various free online post-processing services available to the general public. The article was super timely, as it was published a day after the U.S. government shutdown and the NGS OPUS website went blank. Therefore, thousands of GNSS users read the article in a very short amount of time.
Dr. Minghai Jia, a key developer of Australia’s AUSPOS online GNSS post-processing service, commented, “This is an excellent article, which has boosted AUSPOS demand significantly.”
Number four on GPSWorld’s website for 2013 was Tony Murfin’s article on the real-time PPP landscape.
Whereas the real-time PPP landscape remained relatively unchanged for many years, with OmniStar and Starfire services being the only games in town for satellite-based precise positioning on land (as opposed to off-shore), this landscape is changing.
In 2012, TerraStar began offering a commercial service very similar to OmniStar and Starfire — real-time decimeter positioning using corrections delivered via satellite (no terrestrial Internet connection required).
Also in 2012, Trimble introduced its satellite-based RTX service, touting 4-cm real-time PPP accuracy.
In April 2013, the IGS announced it began offering a public (free) real-time PPP decimeter service (IGS RTS). While only supporting GPS initially, IGS plans to support GLONASS by the end of 2013.
The challenge for both TerraStar and IGS RTS is that receiver manufacturers need to integrate firmware to utilize these services. It’s unlikely that those companies offering competitive services that also design GNSS receivers (Trimble, Navcom) will do so, thus making it difficult for the new services to gain market traction.
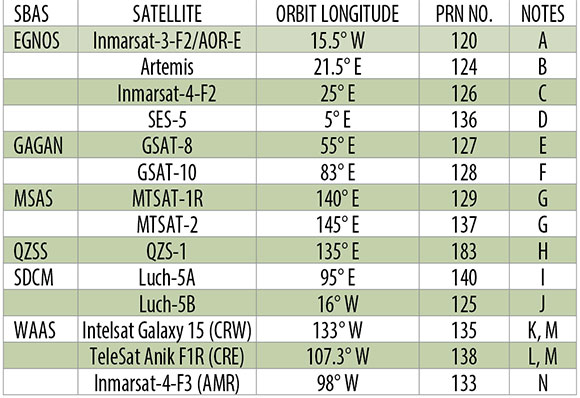
Rounding out the Top 5 GPSWorld web pages of 2013 is The Almanac, featuring GNSS constellation tables compiled by Prof. Richard B. Langley at the University of New Brunswick.
If you want a single, comprehensive webpage that lists all the navigation satellites from the various constellations, this is one you should bookmark in your web browser. Heck, there’s even a PDF version of it. GPS, GLONASS, Galileo, BeiDou, IRNSS, and public SBAS systems are listed in detail as well as many useful links to various GNSS resources.
An updated Almanac will appear in the January issue of GPS World.
If you are not quite feeling the holiday spirit, take a look at these wonderfully talented people in this four-minute music video. They don’t use any instruments besides their amazing voices.
As some of you may know, I also write a monthly column for Geospatial Solutions, which is all about geospatial technology encompassing GIS, surveying, engineering, and anything regarding geospatial technology. On occasion, I write something that fits very well with both my Survey Scene newletter and Geospatial Solutions Monthly newsletter. This is one of those months.
Drones, UAVs, UAS…whatever you want to call them, are getting a lot of press coverage, both in the mainstream media and the surveying trade media. Rightly so — there are a terrific number of uses for drones in surveying and mapping from forensic mapping to crop monitoring to creating terrain models for volume estimations. A little later below, I’ll give you a link to my more detailed article about applications and my personal experience.
In this article, I’d like to focus on the U.S. law regarding using drones for commercial purposes (eg. mapping, surveying, etc). I’ll start with a blanket statement.
Under the current law, it is illegal for any commercial entity to operate a drone in the U.S. Period.
The only exception is that the Federal Aviation Administration (FAA) is issuing special airworthiness certificates in the experimental category for testing, market survey, and training of drones. However, the FAA specifically states that drone users awarded such an experimental certificate are not licensed to use drones for “hire or compensation.”
The only other possibility is if the commercial entity has an airworthiness certificate for the drone like what’s required for any other aircraft such as an airliner. However, you can bet that no drone within your price range has such a certificate.
What about hobby users?
This is where it gets interesting and where some commercial users think there is wiggle room.
Under the current FAA rules, hobbyists (the FAA calls them modelers) can fly drones up to 400 feet above ground level (AGL) and must notify the airport operator if flying within three miles of the airport. Hobbyists are covered under the AC 91-57 rules, a simple one-page document.
Some (maybe many) companies and/or individuals who are operating drones for mapping in the U.S. think this is a loophole in the FAA rules, and that as long as they do not charge for the drone flight-time, they are not violating the FAA rules (they say they only charge for processing the data). The FAA begs to differ. When I asked the FAA this question, FAA Spokesperson Alison Duquette responded:
“They would be violating FAA rules. Please read this policy link. The FAA recognizes that people and companies other than modelers might be flying UAS with the mistaken understanding that they are legally operating under the authority of AC 91-57. AC 91-57 only applies to modelers, and thus specifically excludes its use by persons or companies for business purposes.”
This begs the question, is the FAA following a “don’t ask, don’t tell” informal policy? The best way to determine this is to look at their enforcement activity. When I asked the FAA if it would send me the list of enforcement activity regarding drones, the agency said I’d have to submit a Freedom of Information Act (FOIA) request, which I did this week. I’m told by my colleagues it may take some time before I get a response.
I know of at least one instance where the FAA told an entity to shut down its use of drones. Take a look at this three-minute CBS news video.
Last month’s article about post-processing alternatives, “Seven Free Alternatives to OPUS GPS Post-Processing During U.S. Federal Government Shutdown,” was one of the all-time, most-read articles ever published on the GPS World website. It’s ironic because I’m not a fan of post-processing in general. Mind you, I coordinated the development of several post-processing (both L1 and L1/L2) software packages back in the 1990s, so it’s not like I’m afraid to post-process or don’t understand the technology. It’s just that it’s so inefficient compared to RTK. However, I do concede that OPUS, AUSPOS, CSRS, Centerpoint RTX, GAPS, Scout, and MagicGNSS online post-processing tools combined with an increasing number of publicly available, worldwide GNSS reference stations make centimeter-level post-processing a lot easier (and less expensive) than ever before. It seems like a lot of you still prefer it!
RTK technology is advancing too, from both a receiver perspective and a satellite system perspective. Which geographic region of the world do you think is the most well-suited for RTK positioning?
It may seem like an odd question, and it would have been to me had I not attended the ION GNSS+ conference in Nashville, Tennessee, in September and the Intergeo 2013 conference in Essen, Germany, in October. How could one geographic region be significantly better for RTK positioning than another? Terrain? Nope. It’s the same country that consumes more L1/L2 receivers than any other country in the world: China.
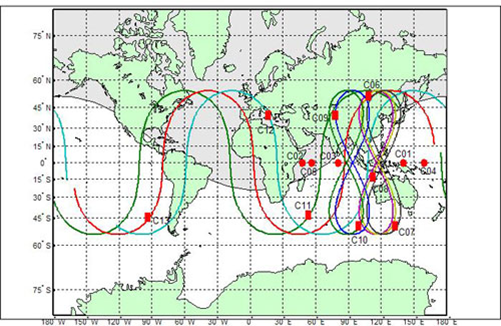
Why China? A picture (well, two pictures) is worth a thousand words:
At this point, China’s BeiDou (now referred to as BDS) navigation system is a regional system. If you look at the above graphic of the BDS satellite orbits, you can see the satellite figure eight orbits above southeast Asia. These satellites, combined with GPS and GLONASS, give the RTK user a tremendous number of usable satellites. Furthermore, since the BDS satellites are in figure-eight orbits, they stay “in view” longer ,which is ideal for RTK.
The result is that GNSS users in the BDS coverage area have more satellites in view than any other region in the world, and we all know that more satellite observations make for better RTK positioning.
China’s plans don’t stop with BDS being a regional system. By 2020, China says it plans for BDS to be a global system similar to GPS and GLONASS. The BDS presenter at ION GNSS+ said, “China always regards BeiDou belonging to both China and the world.”
GPS and Galileo Delays
Meanwhile, as it seems China is pushing forward, both GPS and Galileo suffered delays last month.
The fifth GPS IIF satellite (IIF-5) launch scheduled for last month was postponed. A fuel leak in the Delta 4 launch rocket seems to be the culprit. No new launch date has been scheduled for IIF-5. The United Launch Alliance (ULA) issued the following statement:
“The ongoing Phase II investigation has included extremely detailed characterization and reconstructions of the instrumentation signatures obtained from the October 2012 launch and these have recently resulted in some updated conclusions related to dynamic responses that occurred on the engine system during the first engine start event.
“The GPS IIF-5 Delta IV launch is being delayed to allow the technical team time to further assess these updated conclusions and assess the improvements already implemented and determine whether additional changes are required prior to the next Delta IV launch.
“The Delta IV booster for the GPS IIF-5 mission has completed the standard processing and checkout on the launch pad and will be maintained in a ready state for spacecraft mate and launch pending completion of this assessment. A new launch date will be established when the assessment of the updated dynamic response information is completed in the coming weeks.”
Meanwhile, Europeans have been waiting on pins and needles for the first production launch of dual Galileo satellites. A fall 2013 launch date was expected, but has been postponed until Summer 2014.
According to European officials, the European Space Research and Technology Centre (ESTEC) thermal vacuum chamber for testing satellites under orbit conditions was not ready for the two FOC satellites delivered by OHB in late summer.
The satellites thus cannot ship to the Guiana spaceport in South America in time for a planned 2013 launch on a Soyuz rocket. The Galileo schedule is also running into bottlenecks with scheduled launches by other satellite programs aboard Guiana Soyuzes.
A six-week test of the first Galileo satellite at ESTEC reportedly got under way in October.
The pressure is rising for Galileo to start delivering usable satellite observations, which China is already doing, albeit for themselves and their neighbors.
On October 1, 2013, the U.S. federal government shut down and furloughed 800,000 non-essential workers. While services considered essential remained active, those considered non-essential services, like the National Geodetic Survey’s Online Positioning User Service (OPUS), were shutdown. OPUS is a free, online GPS post-processing service. If you try to access www.ngs.noaa.gov, the following screen will be displayed:
Photo: NOAA
For those of you who rely on OPUS for GPS post-processing, now is a great time to try one of the other seven online post-processing services available and not subject to the U.S. federal government. Yes! I wrote seven, and the results from those seven are comparable to OPUS. The other seven, free online GPS post-processing services are:
CSRS-PPP: Canadian Spatial Reference System, Natural Resources Canada
My colleague Mark Silver, creator of the X90-OPUS receiver I wrote about a few months ago, embarked on an effort to run test data through each of the online post-processing services to demonstrate that there are free, online GPS post-processing services available worldwide that produce results comparable to OPUS. The following report is the result of his efforts:
A Comparison of Free GPS Online Post-Processing Services
By Mark Silver
You are probably familiar with the National Geodetic Survey’s OPUS suite of online post processing tools (OPUS-Static, OPUS-Rapid Static and OPUS-Projects.) These services are capable of producing centimeter-level positioning from static GPS observations. What you may not realize is there are at least six viable alternatives to OPUS.
All are free, easy to use, provide world-wide coverage, and generate surprisingly similar results.
Since each uses a unique baseline tool and processing strategies they form an excellent reality check against each other.
IGS orbits and the IGS permanent CORS arrays are used by many of the services, however some use proprietary equipment arrays and orbit products that provide additional redundancy.
How comparable are these services? Which one is the best?
Criteria for Comparing
Comparing results is a difficult proposition:
The true/correct answer for any site is unknown.
What grading scale should be used? Should elevation differences be weighted differently than horizontal differences?
Should the peak-to-peak range or the standard-deviation be prized?
Should comparisons be made on long 24-hour data sets or short 2-hour occupations?
Is a single data set sufficient for a meaningful comparison or are multiple data sets preferable?
Should a service be ‘thrown out’ of consideration because the solutions are substantially different from the mean?
The answer to all of these questions is “it depends.” Your evaluation will depend on your specific application.
For this evaluation, the following rules governed the data set selection:
Choose a site known to be stable with a clean EMI environment.
Use 24-hour observation sets to enable ‘best case’ processing.
Use a sufficiently large data set, 32-consecutive days, to expose trends.
Choose a time period, 90-days in the past, so precise orbits are available to reduce ephemeris effects.
Only consider GPS data.
Use default settings for every option on each processing service.
Scoring
This would not be as interesting without a little competition.
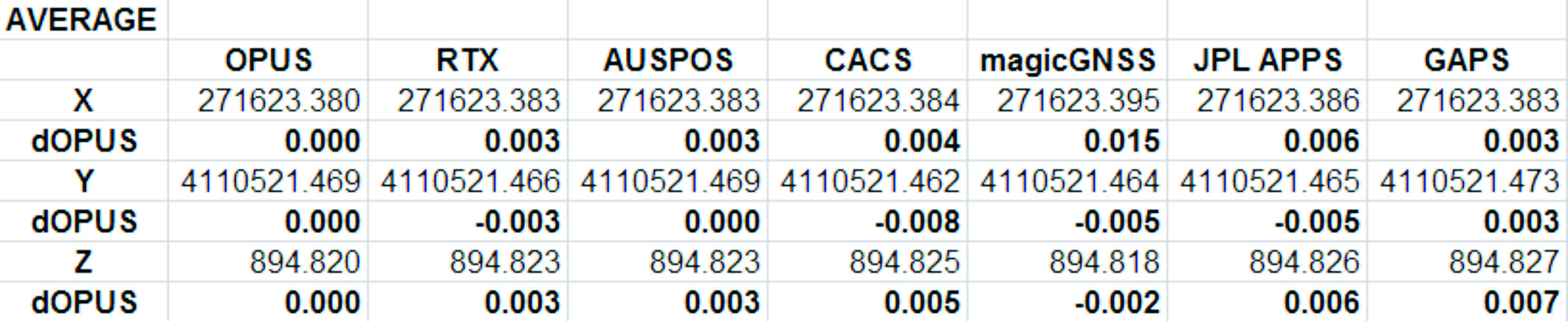
To keep the evaluation simple, the sum of the X, Y and Height range will be the score and the services will be ranked from lowest score to highest score, with the low score being the ‘best.’
Range was chosen as an indicator of the expected maximum error that might be encountered if only a single 24-hour file was observed.
The combined range rewards a processing scheme that best estimates delays, interference, clock errors and other sources of change that occurred during the 32-day trial.
Remember that the every aspect of this ‘competition’ is arbitrary: from the selection of observation sets, to the final scoring system.
The real take-away from this evaluation is not that one service is better, but how close all of the services are to each other.
Two services (JPS’s APPS, magicGNSS) won’t be acceptable to the average user and a third (RTX Centerpoint) may not work for some users based on receiver and antenna support. Details of these problems are presented with the service descriptions below.
The Test Data
SGU1 in St. George, UT USA was chosen as the observation base. The observations consist of 32 consecutive days (May 3, 2013 through June 3, 2013), 24-hour observation files, 30-second interval, GPS only data. The data files were downloaded from the NGS CORS archive.
Each of the 32 files were submitted to each of the processing services and the results have been tabulated for X, Y and Ellipsoid Height. All data is presented in IGS08 current epoch framed coordinates. All data has been projected to UTM Meters for these comparisons.
The Average Values
Remember, the real story is how close each of these services produce results to one another. Let’s look at the average positions from each service and the difference from OPUS:
Fig 1: Average Solution Difference from OPUS
As you can see in Figure 1 above, the services were generally within 5mm of OPUS in X, Y and Height.
Position Tracking vs. Time
Fig 2: Service Results X vs. Time
Fig 3: Service Results X Range, Average
Fig 4: Service Results vs. Time
Fig 5: Service Results Y Range, Average
Fig 6: Service Results Z vs. Time
Fig 7: Service Results Z vs. Time
And the Winner Is…
Following are the scores, based on the combination of X, Y and Height range:
Fig 8: The Scores
Score ranking (remember this is just for fun as the services provided remarkably similar results):
AUSPOS
CenterPointRTX
GAPS
APPS
OPUS
CSRS-PPP
magicGNSS
There is a significant issue in the JPL APPS’s reported output positions, which will keep it from being of any use to most users. magicGNSS’s results are significantly different than the other services. User’s should independently evaluate magicGNSS’s suitability for their purpose. SOPAC’s SCOUT could not be evaluated because it patently does not support either the receiver or antenna that was used at the test site.
AUSPOS is a free service from Geoscience Australia. Access is via a simple web interface, the antenna height and type are entered along with a email address for the returned report set. File submission is via FTP or directly from the web interface.
The returned PDF report is the best looking of the reviewed services and includes a Processing Summary showing a map of the CORS sites that were used in the solution. SINEX files are also available.
AUSPOS uses the Bernese GNSS Software for processing baselines, IGS orbits and IGS network stations. Solutions are available for anywhere on the earth.
RINEX files need to be at least 1-hour in length, 6-hour files are recommended. Compact RINEX files are also accepted. Files may be compressed with UNIX, Hatanaka, ZIP, gzip or bzip compression.
Centerpoint RTX Post Processing: Trimble Navigation Limited
CenterPoint RTX Post Processing is a free service offered by Trimble.
It works anywhere in the world and is based on a proprietary Trimble 100+ worldwide CORS network. Accuracy is 2 cm with 1-hour of observation data; 1 cm with 24-hours. Files longer than 24-hours are not accepted.
RTX uses GPS, GLONASS and QZSS tracked SV’s.
The reported output frames include ITRF2008 at current epoch and a user selectable frame like NAD83/2011 2010.0. RTX is one of the few services that will directly export NAD83 framed results.
A single page PDF and a XML result file are returned by RTX. Unfortunately, it is not possible to copy numerical results from the read-only PDF result file to the clipboard.
RTX supports a limited number of receivers (Trimble, Ashtech, Javad, some Leica, some Topcon) and a relatively small subset of IGS modeled antennas. For this test, TEQC was used to stuff the RINEX headers with a comparable Trimble receiver to the actual Ashtech ProFlex 500 receiver that is in use at SGU1. This was all that was required to spoof an accepted device. If the antenna had not been listed, it would have been necessary to spoof the antenna and adjust the height to reflect the difference in L1 phase center offset.
GAPS is an ongoing project at the University of New Brunswick and was developed by the Department of Geodesy and Geomatics Engineering.
File submission is by a web page and GAPS provides a large number of user inputs and potentially allows the highest level of customization of any of the reviewed services:
You may enter a priori coordinates, and a priori constraints
GAPS accepts static or kinematic files
You can set the elevation mask
The Neutral Atmosphere Delay model is selectable
Earth Body Tides and Ocean Tidal Loading can be applied or disabled
GAPS only processes GPS data (no GLONASS.)
Submitted filenames must adhere to the SSSSDDDh.YYt file format. GAPS accepts RINEX and compact RINEX files, they may optionally be gzip, unix compressed or ZIP compressed.
WARNING! APPS only reports the derived position to the nearest decimeter-meter in geographic (lat/lon) coordinates, while reporting ECEF coordinates to a fraction of a millimeter. If you choose to use APPS, you will need to manually convert the ECEF XYZ to geographic coordinates.
JPL’s APPS is based on GIPSY-OASIS (currently version 5). APPS uses NASA’s 70+ Global GPS Network plus densification from other systems (100+ total receivers distributed globally.) Solutions are typically available with 5 seconds delay from observation.
APPS is easy to use, you just specify a file to upload and then click on ‘Upload’ it takes only 15 seconds to get a result after the file upload is complete. You can optionally register for a free account and use email or FTP for bulk uploads.
APPS also has receiver Live Performance Monitoring: (http://www.gdgps.net/monitoring/index.html) which generates a real time graph of three receivers spread through the world.
Before using CSRS-PPP, you will need to register for a free user account.
CSRS has a fantastic desktop application named PPP-Direct that you can just drag and drop files onto. PPP-Direct automatically submits the file and saves all typing, greatly reducing the chance of error.
CSRS-PPP uses both GPS and GLONASS (if available) observables. Ocean Title Loading corrections can be overridden.
CSRS-PPP will accept single frequency files for processing. CSRS will accept RINEX and Compact RINEX, and will decode ZIP, GZIP and unix compression formats.
CSRS-PPP has a fantastic PDF report, a .csv file detailing results epoch by epoch and a great machine readable summary file.
The desktop submission tool, coupled with the great output reports made CSRS-PPP my favorite tool.
magicGNSS accepts emailed files and returns solutions by email. Turnaround time is fast and features a nice PDF report plus SINEX, receiver clock bias files, tropospheric delay, KML trajectory and RINEX CLK clock bias files.
Static and kinematic files with observations from GPS, GLONASS are processed by magicGNSS and the service reportedly Galileo-ready.
magicGNSS uses a subset of IGS stations to provide core coverage.
SCOUT: Scripps Orbit and Permanent Array Center (SOPAC). University of California, San Diego
Scout accepts RINEX and compact RINEX files, compressed (Z, gz, ZIP) submitted from an FTP site or pushed onto a provided FTP server.
Files must be generated on a limited subset of receivers and antennas. While the IGS antenna and receiver files are the basis for acceptable devices, not all IGS-listed devices are on the allowable device list. SCOUT documentation specifically warns against spoofing devices and antennas.
SCOUT uses the GAMIT processing engine.
Because the test data for this article is from a unsupported receiver and the submittal process requires a FTP host server with anonymous access which most users will not bother with, the output from SCOUT was not evaluated.
Conclusion
The similarity of results between all of the services I processed is amazing. That they differ only by millimeters demonstrates the robustness of the algorithms and processes they use.
The difference between AUSPOS, RTX, GAPS, OPUS and CSRS-PPP solutions are negligible. For important positioning projects, it undoubtedly makes sense to use them all.
For locations in the United States, OPUS and RTX return NAD83-2011 framed results. Only OPUS returns derived orthometric heights using GEOID12A. While OPUS has more provenance than the other services, it is easy enough to submit important observations to multiple services as a reality check for important positions.
###
As you read from Mark’s report above, even though OPUS is shut down until the U.S. Congress can resolve its differences, don’t let that stop you from processing your GPS static sessions. However, some level of due diligence on your part is needed as requirements vary for each service. For example, static sessions for the OPUS-RS service can be as short as 15 minutes while other services require two hour GPS static sessions. Furthermore, some services process GPS L1 data while others require both GPS L1 and GPS L2 observations.