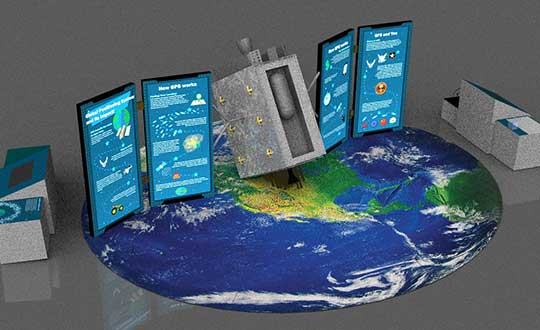
On April 2, a new museum exhibit will open that focuses on the U.S. Air Force’s role in the management of GPS satellite systems.
The National Museum of the United States Air Force is holding a grand opening event for the new GPS Exhibit from 2-3:30 p.m., with remarks by U.S. Air Force personnel involved with the exhibit followed by light refreshments.
The museum is located at 1100 Spaatz Street, Wright-Patterson Air Force Base, Riverside, Ohio.
On April 2, 2020 a new exhibit will open focusing on the U.S. Air Force role in the management of GPS satellite systems. (Artist’s concept: USAF)
History and Benefits. GPS began as a military navigation tool in the early 1960s. Later, the U.S. Air Force became the lead organization for developing the system. It manages the system, providing highly accurate position, navigation and timing information to users worldwide, for free.
The exhibit describes what GPS is and how it works by outlining satellite and ground systems and their historical development. It explains how atomic clocks and GPS satellites enable all kinds of important activities.
These include mapping and navigation for everyday users and the military, commerce, farming, construction, cell phone systems, the power grid, and climate research.
The exhibit also explains how satellite orbits work, and it outlines the problem of “space junk.”
Hands-on. Interactives and videos help all ages better understand GPS, learn how to find their location on the Earth, and see how orbits and satellites work.
The museum will be open late on opening day, allowing guests to tour the museum until 8 p.m., with an opportunity to walk inside an AC-130A. The Lockheed AC-130 gunship is a heavily armed, long-endurance, ground-attack variant of the C-130 Hercules transport, fixed-wing aircraft.
The exhibit opening will take place in the Space Gallery (fourth building).
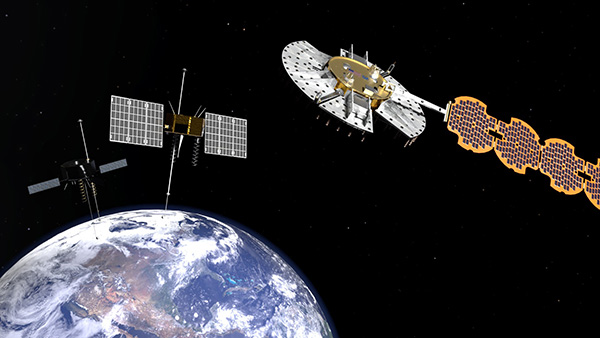
L3Harris Technologies has reached a major milestone in the U.S. Air Force’s Navigation Technology Satellite-3 (NTS-3) project — passing the preliminary design review that defines the spacecraft’s path to delivery and allows the program to move to the next phase of development.
NTS-3 is an experimental program examining ways to improve the resiliency of the military’s positioning, navigation and timing capabilities. It will also develop key technologies relevant to the Global Positioning System (GPS) constellation, with the goal of future transition to the GPS IIIF program.
In collaboration with the Air Force Research Laboratory, Space and Missile Systems Center, and United States Space Force, L3Harris is combining experimental antennas, flexible and secure signals, increased automation, and use of commercial command and control assets.
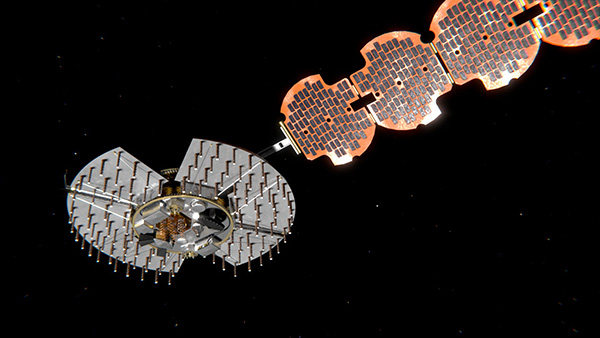
Satellite NTS-3 closeup. (Illustration: Lt. Jacob Lutz, AFRL Space Vehicles Directorate)
“The NTS-3 vanguard is an experimental, end-to-end demonstration of agile, resilient space-based positioning, navigation, and timing,” said Arlen Biersgreen, Air Force NTS-3 program manager. “It has the potential for game-changing advancements to the way the Air Force provides these critical capabilities to warfighters across the Department of Defense. The commitment demonstrated by United States Space Force to partner with AFRL and support technology transition was a key element in NTS-3 being designated as an Air Force vanguard in September 2019.”
The Space Enterprise Consortium selected L3Harris for the $84-million contract in 2018 as the prime system integrator to design, develop, integrate and test NTS-3, including ground mission applications.
“We have moved from contract award to finishing an early design review in under one year, which is an amazing accomplishment for a satellite development program that normally takes twice that amount of time,” said Ed Zoiss, President, Space and Airborne Systems, L3Harris. “We have proven we can move quickly to support the Air Force’s go-fast mission requirements.”
L3Harris has more than 40 years of experience transmitting GPS navigation signals. The company’s technology has been onboard every GPS satellite ever launched.
Specifically, Booz Allen’s work will aid in the development and modernization of GPS systems through major programs such as Military GPS User Equipment (MGUE), GPS III and Next Generation Operational Control System (OCX).
The NIWC Pacific Positioning, Navigation, and Timing (PNT) Division is the Navy’s principal research and development center for navigation sensors and systems.
SMC is the center of technical excellence for developing, acquiring, fielding, and sustaining resilient and affordable military space systems.
With this contract, Booz Allen will continue to serve as a key mission partner for NIWC Pacific and SMC on the important endeavor of modernizing PNT systems for U.S. and Allied warfighters.
To execute this highly complex scope of work, Booz Allen will provide a range of essential services, including system definition, requirements synchronization, capability improvement, cybersecurity engineering, platform integration and testing, and acquisition program management.
“Booz Allen’s robust track record of work in both systems engineering and cybersecurity continues to inspire trust from our clients,” said Vice President Brian Zimmermann. “Our deep bench of leaders and technical experts reassures our clients that no project is too big or too complex. It’s our privilege to help the Navy and Air Force modernize GPS systems that are so vital to the security of our nation.”
Read more about Booz Allen’s work with PNT systems here.
Staff Sgt. Reag Wood of 1st Combined Arms Battalion, 5th Brigade, 1st Armored Division, illustrates how he uses an iphone to obtain a visual image of a mock with insurgent activity during a field training exercise at White Sands Missile Range, N.M. (Photo: U.S. Army/Lt. Col. Deanna Bague)
A proposed FAA rule — open for public comment until March 2 — would require drones over 0.55 pounds to electronically transmit their location and ID.
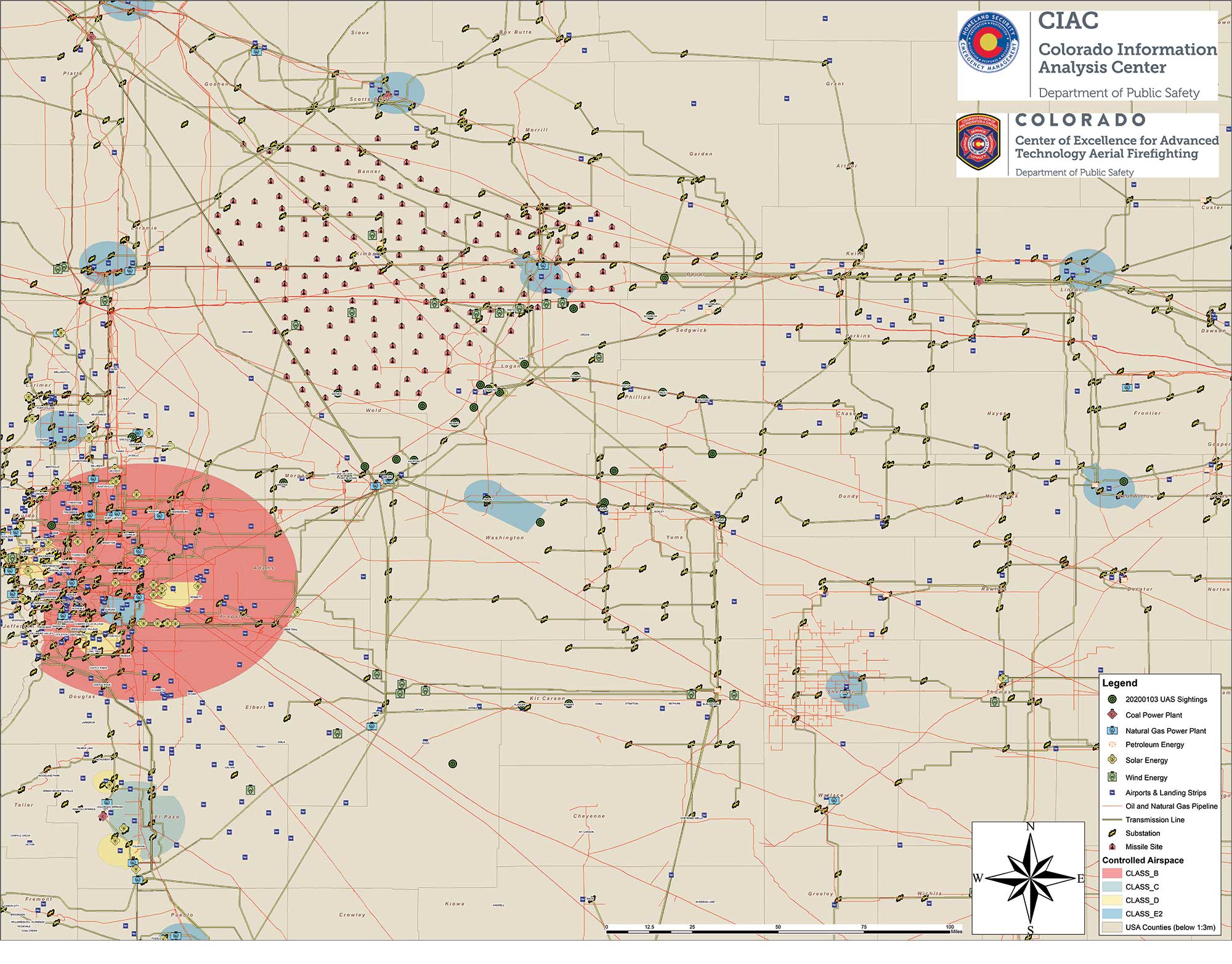
Northeastern Colorado was visited with a mystery in late December and January. Residents began seeing drones from 7 to 10 p.m. each night, moving in groups as large as 30, and flying in a grid pattern. The drones stayed about 200 feet to 300 feet in the air and flew steadily in squares of about 25 miles, at speeds estimated at 25–40 mph.
Reports were so numerous that a multi-agency task force was formed to investigate, including 10–15 law enforcement agencies as well as the FBI and Federal Aviation Administration (FAA). The drones were reported to measure six feet across and sound like a small jet engine. “These are not drones that people in our county can just buy,” said Washington County Sheriff Jon Stivers.
Numerous government agencies and companies denied the drones were theirs, including the U.S. Air Force, NOAA, NORAD, the FAA, and large drone developers Google, Amazon and Uber.
The Colorado Division of Fire Prevention and Control (DFPC) flew the state’s Multi-Mission Aircraft in an area where drones had been reported during two January missions.
This DFPC map, obtained by FOX31 TV, shows possible locations of drone sightings along with power plants, pipelines and missile sites. (Map: Colorado Division of Fire Prevention and Control)
Some suspect the drones were part of a secretive Air Force counter-drone program to protect nuclear missile silos. Another theory was a hunt for a missing nuclear warhead from one of the many intercontinental ballistic missile sites that dot the prairies of Wyoming, Colorado and Nebraska.
A group of Wichita, Kansas, drone enthusiasts also came forward, saying they had flown groups of drones in the area — but not to the same scale.
In an interview at January’s World Economic Forum in Davos, Switzerland, Transportation Secretary Elaine Chao told Yahoo Finance, “We don’t know who they belong to, we don’t know who’s operating them, to this day we do not.” Her department oversees the FAA, which issues Part 107 waivers to drone operators, allowing them to fly at night or out of line of sight of the operator. The waivers (thousands have been issued) lack enough specifics to narrow down who might be responsible for mystery drones.
A proposed FAA rule — open for public comment until March 2 — would require drones over 0.55 pounds to electronically transmit their location and ID, giving agencies access to information on drones in flight.
The new remote ID requirement would help with the creation of the Unmanned Aircraft System Traffic Management System, a project between the FAA, NASA and other agencies to “ultimately identify services, roles and responsibilities, information architecture, data exchange protocols, software functions, infrastructure, and performance requirements for enabling the management of low-altitude uncontrolled drone operations,” according to the FAA.
As of press time, no one has come forward to claim ownership of the drones. The public is encouraged to submit reports. As The X-Files’ Fox Mulder might say, “Watch the skies.”
An accuracy test of the Locata Network — a non-GPS-based positioning system installed at the U.S. Air Force White Sands Missile Range in New Mexico — focused on timing down to the nanosecond, with impressive results.
In 2018, the 746th Test Squadron (746 TS) tested its Non-GPS-Based Positioning System (NGBPS) at White Sands Missile Range as an alternative to GNSS for precise time transfer and synchronization. This was the first independently measured and characterized testing program for the NGBPS, which leverages Locata’s radio-based position, navigation and timing (PNT) technology to achieve high accuracy independent of GPS.
Using specific parameters and equipment configurations, independent experts proved Locata’s absolute and relative time synchronization and frequency stability performance. Under testing, the NGBPS provided exceptional time transfer and frequency stability across large areas.
With these successful results in hand, the U.S. Department of Defense will be able to leverage this capability for programs requiring high-precision time and frequency distribution, without relying on GPS alone. Plus, the system is flexible — Locata’s area of transmission can be increased to cover substantially larger areas than at White Sands for safety-of-life, military or government-mandated systems.
With USNO personnel, members of the 746 TS reconfigure the Master LocataLite site for the test. (Photo: 746 TS/USAF)
Background
Over the past two decades, the free availability of GPS time has enabled a plethora of time-dependent applications. Time and frequency synchronization between remote locations is crucial for digital communication systems, electrical power grids and financial networks, to name a few. Military operations also require accurate and reliable time information. Typically, these applications require accurate time synchronization ranging from 10 microseconds (μs) down to 100 nanoseconds (ns). Yet, while our critical reliance on GPS for time transfer continues to escalate, GPS remains susceptible to interference, disruption or denial.
A technician with the 746 TS re-aims a LocataLite antenna for an alternative TimeLoc configuration. (Photo: 746 TS/USAF)
Locata. Locata Corp., a privately owned Australian company with a U.S. subsidiary, invented a radio-location technology that provides precise PNT for environments where GPS coverage is unavailable. Locata ground-based PNT technology delivers positioning that, in many scenarios, far exceeds the performance and reliability of GPS. LocataNets, the company’s terrestrial networks, function as local ground-based replicas of traditional GPS position and timing services. They can be designed to reliably deliver a powerful, controllable, tailored signal as user applications require.
A LocataNet consists of synchronized LocataLite transceivers, all-in-one units that transmit and receive out of the same 10 x 5 x 1-inch box. Cables are connected to antennas for signal reception and transmission. Locata Rovers are mobile receivers within the network that use these synchronized LocataLite signals to calculate an accurate PNT solution.
The 746 TS employs the basic LocataNet laydown — multiple Slave LocataLites receive signals from a single Master LocataLite transceiver. The patented process by which slaves are synchronized to the master (or other slaves) is known as TimeLoc.
Until these new tests were run, the squadron’s attention had primarily been focused on the high-accuracy use of Locata’s position and navigation solution as an alternative to GPS when it is jammed, deceived or unreliable. But because all LocataLites are precisely synchronized via TimeLoc, network synchronization is a natural extension of Locata technology’s core capabilities.
In October 2015, GPS World reported that the United States Naval Observatory (USNO) showed LocataLites are a viable option for a stable 1 pulse per second (1 pps) distribution setup within an urban environment, where it can support applications such as cell-tower synchronization in GPS-challenged environments. The USNO tests demonstrated synchronization of less than 200 picoseconds — significantly better than any other known wireless network synchronization methodology, including GPS. If clear line-of-sight is available between a master and Slave LocataLite, precision is 50 picoseconds with frequency stability to 1×10-15 —better than a Stratum One atomic clock.
Because of the USNO’s timing expertise and familiarity with Locata TimeLoc testing, the 746 TS tasked the USNO to conduct independent synchronization experiments at White Sands, with the following objectives:
Evaluate the Locata master, slaves and non-Locata timing receiver at the master site in reference to USNO master atomic clock time.
Determine the Locata network’s internal, independent synchronization stability and accuracy.
Determine the Locata Rover’s 1 pulse per second (PPS) time stability and accuracy, for use in time transfer applications.
The primary purpose of the tests was to show that nanosecond-level time transfer is possible over significantly wide areas by using Locata, and that TimeLoc technology offers a relatively easy means of supporting exceptionally high-precision time and frequency distribution over large broadcast areas.
Slave LocataLite site layout. (Photo: 746 TS/USAF)
Synchronization Method
Since Locata technology was originally developed as an RF-based high-precision non-GPS-based positioning and navigation system, the time synchronization accuracy requirements for a LocataLite transceiver are very high. If centimeter positioning precision is desired for a Locata receiver, every small fraction of a second is significant; for instance, a 1-ns error in time equates to an error of approximately 30 centimeters (because of the speed of light).
TimeLoc is a patented high-accuracy wireless synchronization method developed by Locata Corp. It allows LocataLites to achieve high levels of synchronization without atomic clocks, external control cables, differential corrections or a master reference receiver.
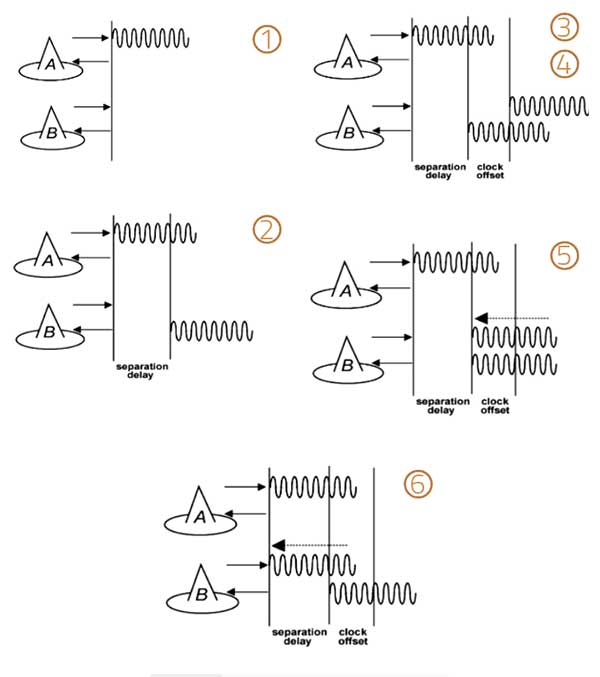
The TimeLoc procedure is described in the following steps for synchronizing two LocataLites (see Figure 1).
LocataLite A transmits a unique signal (code and carrier).
The receiver section of LocataLite B acquires, tracks and measures the signal generated by LocataLite A.
LocataLite B generates its own unique signal (code and carrier) which is transmitted, but, importantly, it is also received by the receiver section of LocataLite B.
LocataLite B calculates the difference between the signal received from LocataLite A and its own locally generated and received unique signal. Ignoring propagation errors, the differences between the two signals are due to the clock difference between the two devices and the geometric separation between them.
LocataLite B adjusts its local oscillator to bring the differences between its own signal and LocataLite A to zero. The signal differences are continually monitored and adjusted so that they remain zero. In other words, the local oscillator of B follows precisely that of A.
The final stage is to correct for the geometrical offset (range) between LocataLite A and B, using the known coordinates of the LocataLites. When this step is accomplished, TimeLoc has been achieved.
Figure 1. The TimeLoc process. (Image: Author)
The only requirement for establishing a LocataNet using TimeLoc is that LocataLites must receive signals from one other LocataLite. However, received signals do not have to come from the same central or Master LocataLite, because this may not be possible in difficult environments or when propagating the LocataNet over large areas. Instead, a LocataNet can “cascade” TimeLoc through intermediate LocataLites. For example, if a third LocataLite C can only receive the signals from B and not Master LocataLite A, it can use B’s signals for time synchronization instead of A’s, provided that B has already TimeLoc’d to the network. Therefore, by using “cascaded TimeLoc,” there is theoretically no limit to the number of LocataLites that can be synchronized.
Test item description
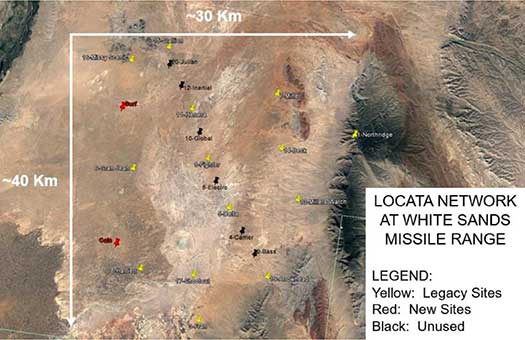
The NGBPS at White Sands consists of an operational LocataNet, where each node (a site instrumented with a LocataLite) is synchronized via Locata’s patented TimeLoc technique. The LocataNet, combined with a mobile Rover, is a subsystem of the 746 TS Ultra-High-Accuracy Reference System (UHARS), which provides PNT information in GPS-denied environments. The NGBPS operates in the 2.4-GHz industrial, scientific and medical band, which is far enough away from GPS frequencies to be unaffected by GPS jamming. Although it is currently used as a source of position truth during GPS jamming, the 746 TS understands that the NGBPS is potentially a source of high-accuracy timing data as well.
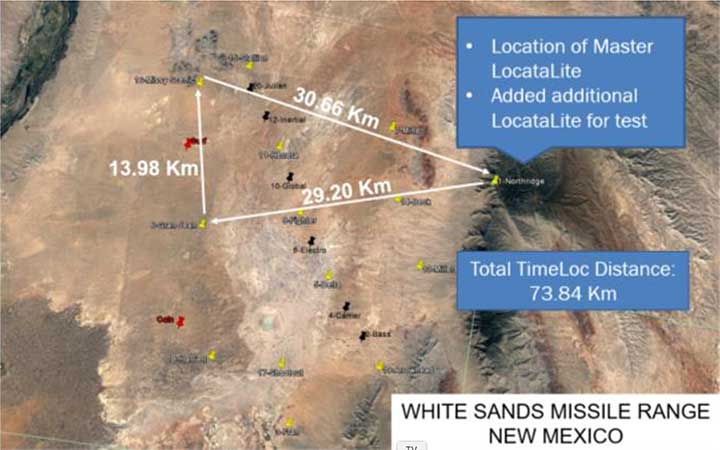
The UHARS is in the northern portion of White Sands Missile Range. It typically consists of 16 LocataLite sites. The master site is at North Oscura Peak, or NOP (labeled Northridge in Figure 2); all other sites are time synchronized to that master site.
Figure 2. Locata network at White Sands Missile Range. (Image: Author)
Each LocataLite site consists of:
one LocaLite
two monuments—pillars for antenna placement (Note: The two new sites lack the permanent monuments for antenna placement)
two transmit antennas
one receive antenna
one meteorological station—for meteorological data
one communication antenna
one trailer for power and transport
The communications antenna at each site is attached to a UHF modem that is used for 746 TS remote control of the LocataNet. This allows remote data logging, reconfiguration or monitoring of the network without having to drive to each site. However, it should be noted that no communications system whatsoever is required for the Locata NGBPS TimeLoc capability to run.
To support the timing tests, the LocataNet was reconfigured several times to meet requirements of specific test objectives. These configurations are described below.
Static ground tests
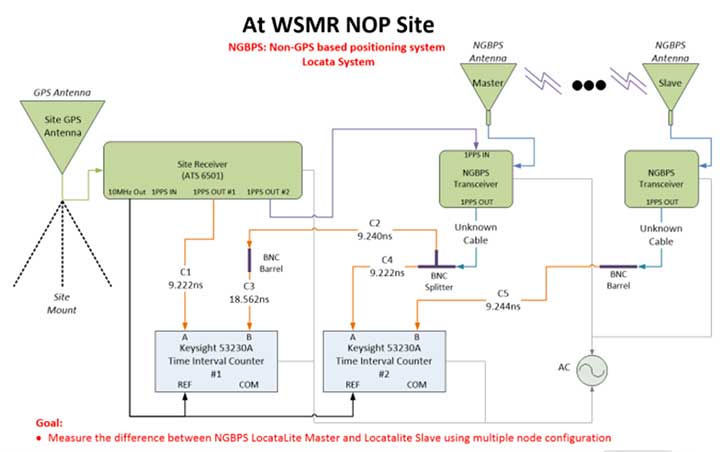
Static ground tests involved multiple configurations. The first (Figure 3) consisted of two LocataLites (master and terminal slave) collocated at NOP close enough that their respective PPS outputs could be compared in a single time interval counter. A terminal Slave LocataLite was installed at NOP specifically for this test.
Figure 3. LocataLite Configuration 1: North Oscura Peak (NOP) site test instrumentation. (Image: Author)
This setup also facilitated simple network reconfiguration to change the number of LocataLite sites being tested. By programming LocataLites to TimeLoc to specific sites at White Sands and redirecting their respective antennas accordingly, the TimeLoc chain under test could be expanded to have multiple sites between the LocataLite master and the collocated terminal slave without changing measuring equipment instrumentation at NOP. This means that the time transfer could hop, or cascade, between one or more sites and be measured with the same test instrumentation.
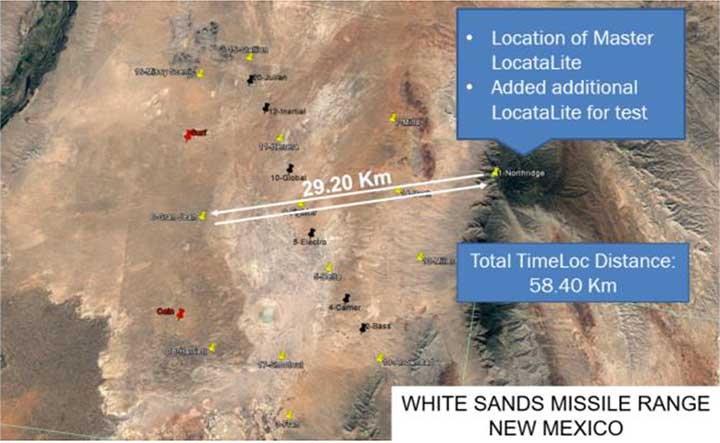
Configuration 2 consisted of three LocataLites: The master at NOP, a slave at Gran-Jean and the terminal slave at NOP. Again, the master and terminal slave were collocated close enough to each other that their respective PPS outputs could be compared in a single time interval counter, but this time the network was configured to cascade the TimeLoc signal through the slave at Gran-Jean, 29.20 km away. Since the TimeLoc signal now had to cascade through two sites and travel from the master at NOP to Gran-Jean and back to the terminal slave at NOP, the effective TimeLoc travel distance was 58.40 km (Figure 4).
Figure 4. LocataLite Configuration 2: Total TimeLoc distance is 58.40 km. (Image: Author)
Configuration 3 consisted of four LocataLites: The master at NOP, a slave at Gran-Jean, a slave at Missy-Scenic and the terminal slave at NOP. This configuration forced the TimeLoc signal to cascade through three sites and travel a total distance of 73.84 km (Figure 5).
Figure 5. LocataLite Configuration 3: Total TimeLoc distance is 73.84 km. (Image: Author)
Ground vehicle test
For Configuration 4, a Locata Rover was instrumented on the squadron’s Small Test Vehicle (STV), which drove all accessible roads within the LocataNet’s coverage (Figure 6). During this mobile test, the LocataNet was configured with 10 active LocataLites. The Locata Rover in the vehicle used Locata signals from available nodes to calculate Locata network time, which was synchronized to the GPS timing receiver at NOP. The data collected determined how well network time is synchronized while in a moving vehicle.
Figure 6. Rover test installation on Small Test Vehicle. (Image: Author)
Test results
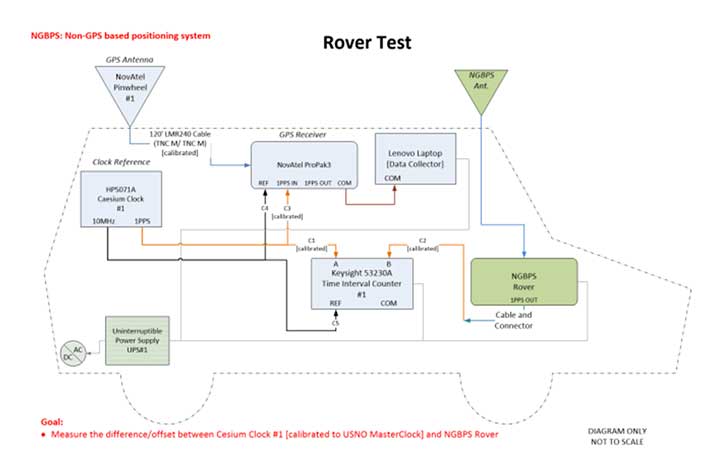
To collect the required data, USNO first had to characterize the performance of the master site’s GPS timing receiver at NOP, and then synchronize it to two separate USNO atomic clocks that could be used as remote timing references for the tests. The GPS timing receiver is equipped with a rubidium oscillator, which produces a GPS-disciplined 1 pps output signal. Its internal rubidium clock is a stable source of time with an advertised UTC (USNO) offset of a best case 15-ns root mean square (RMS) and a worst case 100-ns RMS.
The cesium clocks output 5- or 10-MHz sinusoids and a 1 pps signal. The cesium clocks output 5- or 10-MHz sinusoids and a 1 pps signal and were characterized relative to the USNO correction receiver, which USNO personnel had characterized relative to UTC. Correction data available from a time interval counter could then be applied to tie the timing receiver back to USNO time. The measurements at NOP recorded the difference between the timing receiver and the cesium clocks. Using the relationship between the cesium clocks and UTC (USNO), one could characterize the timing receiver’s time relative to USNO time.
The USNO calibrated measurements at the nanosecond level using two methodologies. The most common approach was simply to compare two 1 pps signals, a method known as “tick-tick.” Another important methodology is referred to as a “tick-phase,” which is a measurement of a sinusoidal signal compared to a 1 pps reference. Some timing equipment will have discrete time jumps with certain tick-phase measurements, because of how narrow the distance between the rising edges of a sine wave is compared to a 1 pps signal.
There’s a chance that the 1 pps signal is close to two rising edges of a sine wave, causing the signal to jump back and forth in its timing measurement, depending on which rising edge of the sine wave it uses.
Measurements were further complicated by the delicate nature of cesium clocks, which perform best under finely controlled laboratory conditions. Each cesium reference exhibits its own characteristics that must be observed, measured, and accounted for. Moreover, transporting them to White Sands Missile Range for this test where temperature fluctuations, moving vehicle vibrations, and altitude variations among devices were introduced made synchronization of these clocks particularly challenging. For example, USNO discovered that the Cesium Clock #1 had its internal batteries disconnected — possibly through the original shipment to White Sands, the constant vehicle vibrations while driving on the range, a faulty wiring in the battery terminals, or possibly a combination of all. This problem induced a random offset in the clock, and calibration had to be re-accomplished to reestablish traceability back to UTC (USNO).
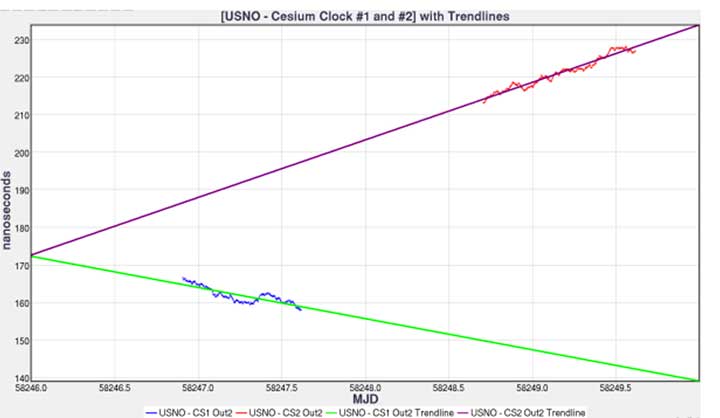
Figure 7 shows each cesium clock’s measured drift rate in nanoseconds/second and its corresponding linear fit. This trendline can then be used to project cesium clock #2 to the past and compare it to the measurements of cesium clock #1.
Figure 7. USNO cesium clocks with trendlines. (Image: Author)
Figure 8 shows the relationship between the timing receiver and USNO master clock and its linear fit. Performing linear fit approximations of the cesium clocks likely introduced unknown errors, potentially increasing the variance of the 1 pps differences.
Figure 8. USNO versus timing receiver with linear fit. (Image: Author)
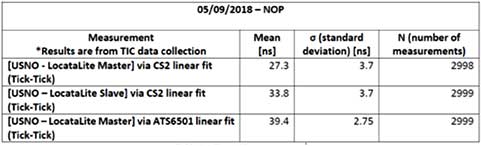
Comparing the 1 pps outputs of the LocataLite master and collocated LocataLite slave to the master site reference clocks (CS2 or timing receiver 1 pps out), the data is traceable back to USNO using the linear fits found for both the USNO timing receiver and cesium clock #2 (Figure 9).
Figure 9. USNO compared to Locata system for May 9, 2018, time interval counter measurements. (Image: Author)
LocataLite timing measurement bias was within 40 ns, and the stability was within 3.7 ns of the reference clocks (see Table 1). The stability of the system is encouraging, as the mean offset can be driven down by more precise measurements and more precise calibrations such as using a two-way satellite time-transfer calibration method (TWSTT).
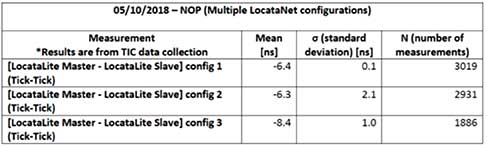
Table 1. USNO compared to Locata system tabulated values and statistics. (Image: Author)
In Table 2, we compare measured data of the 1 pps outputs of the LocataLite master to the collocated LocataLite slave and compute the Locata network internal synchronization in each of the network configurations tested. The data reveals that the network synchronization accuracy is ≤ 2.1 ns. Unfortunately, during Configuration 2 testing, which propagated the TimeLoc signal from NOP to Gran-Jean and back (a total distance of 58.40 km), a technician inadvertently obstructed line-of-site between Locata antennas and consequently temporarily disturbed TimeLoc. Those data points were not removed before this analysis, which is why the reported standard deviation in that configuration, although quite good at 2.1 ns, is nevertheless uncharacteristically high.
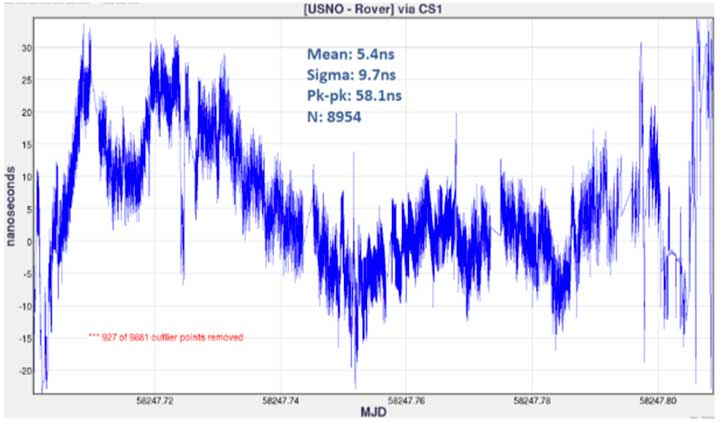
Finally, Figure 10 shows the timing measurements between the USNO master clock and the mobile Locata Rover, via the cesium clock #1 linear fit. Unlike in the LocataLite tests, the Rover is not TimeLoc’d to the network. Instead, it simply calculates its time from LocataLite signals within its line of sight, similar to how a GPS device will calculate its time from satellite signals. During this test, the Rover’s calculated timing accuracy showed a mean of 5.4 ns and stability within 9.7 ns of the USNO master clock, while driving all over the northern portion of the range. To produce the plot, 927 outliers were removed (3 sigma). The outliers occurred at the beginning and ending of the test, when the vehicle was moving from its parking location at Stallion Range Center (outside the operational LocataNet) to the test route and back. The buildings in the area obstructed line of sight and induced significant multipath, which degraded the Rover’s calculations.
Figure 10. USNO LocataLite Rover via CS1 linear fit. (Image: Author)
Conclusion
This endeavor for USNO to characterize the 746 TS NGBPS was met with many challenges, which emphasize the real-world difficulty of measuring time at these extremely fine levels in the field using atomic clocks. The USNO found that some non-linearity started occurring in the USNO – Cesium Clock #2 measurements because of the container of Cesium Clock #2 not being ideal for temperature stability. They also discovered that Cesium Clock #1 had its internal batteries disconnected due to an unknown cause. However, because of deliberate measurements between Cesium Clock #1 and Cesium Clock #2, the USNO was still able to provide calibration measurements but with degradation in the measurement clarity.
From the data collected, USNO personnel found:
The GPS timing receiver at NOP produced 1 pps timing accuracy consistent with its 15-ns RMS specification. Therefore, the reference time delivered to the Master LocataLite was synchronized to UTC within 15 ns.
A standard deviation measurement from Master LocataLite to UTC of under 4 ns.
Locata’s master-to-slave internal time synchronization (independent of GPS) was measured to be between 100 ps and 2.1 ns in 3 different Locata network configurations spanning distances up to 73.84 km (45.88 miles).
The timing measurements in the mobile Rover test show its ability to provide accurate time with a standard deviation of around 10 ns.
Many lessons learned throughout this experiment could be implemented to get more accurate measurements, especially when looking at the accuracies of the GPS time transfer throughout the NGBPS. Looking ahead, more accurate calibration values for both the GPS timing receiver and the Master LocataLite could be made by using a TWSTT method. This would simplify the number of measurements and provide a 1 pps signal of USNO’s master clock, resulting in up to 1 ns of accuracy in the reference time delivered to the Master LocataLite. Depending on the requirements of customers needing NGBPS time at White Sands, the 746 TS and USNO can potentially recharacterize the NGBPS timing accuracy and stability using this methodology.
Manufacturers
The LocataLites and Rovers that create much of the 746 TS NGBPS are manufactured by Locata Corp. The NGBPS synchronized to GPS time via a Microsemi ATS6501 timing receiver. The cesium clocks were Hewlett-Packard 5071A cesium primary frequency standard devices. The USNO used a Novatel ProPak3 for correction data, measured using a Keysight 53230A time interval counter.
Christopher Black earned a B.S. and M.S. in electrical and computer engineering from New Mexico State University. In November 2017 he joined the 746th Test Squadron, Holloman Air Force Base, as a navigation warfare analyst. Now, as lead reference engineer, he heads up research, development and maintenance of the squadron’s reference systems, including UHARS.
This article has been approved by the USAF for public release, #AEDC2019-205.
On CBS’ Sunday Morning show Dec. 1, correspondent David Pogue was invited into the Air Force’s GPS Master Control Station at Schriever Air Force Base in Colorado Springs, Colorado, to show viewers what GPS is all about.
Pogue discussed the GPS program with Brigadier General DeAnna Burt, who oversees the program as the director of operations at Air Force Space Command at Peterson Air Force Base in Colorado Springs.
He also discussed GPS vulnerabilities with Dana Goward, president of the Resilient PNT Foundation and contributor to GPS World magazine.
Pogue also visited Lockheed Martin’s satellite assembly facility, where the new generation of GPS III satellites is being built.
A new digital signal generator that can be reprogrammed on-orbit, enabling it to broadcast new signals
Digital signatures for detecting spoofing attacks
Steerable regional beams in multiple frequencies and signal codes
“Bounce-Back” capabilities for recovery from attack, solar and other disruptions
The NTS-3 marks the first time in 40 years the service has launched such a pioneering effort, following GPS.
The Department of Defense PNT Strategy calls for future military efforts and the results to be classified, making it unlikely that NTS-3 experiments will benefit the majority of PNT users in the civil sector.
Guest column by Jules McNeff Consultant and GPS World Editorial Advisory Board member
GPS World publications are evolving, as this new column confirms. And the PNT world itself is evolving, first with the emergence of GPS in the 1990s, next with its universal adoption and duplication by others, and now with its foundational role in PNT-enabled applications for technologies of the 2020s and beyond.
Millions of people have grown up in a world where GPS-enabled PNT applications pervade their daily lives, and mostly for the better. But GPS is no longer the only face of PNT around the world, though it is still the best known even as other space-based systems from international providers have joined the party.
From its infancy, GPS was married with inertial systems and clocks. For a short time, GPS emergence stymied the commercial development of both, but as the viability of the marriage was validated, development turned toward miniaturization of the combination and adding more pieces as well.
It is now clear that GPS was the spark, and a multi-faceted PNT enterprise is the new reality.
Because of its free availability, GPS has been the foundational element in most of these integrated applications, and without GPS, many will not work as well — or at all. Consequently, dependence on GPS for efficient operation of many PNT-related activities has become a de facto reality. GPS timing is at the heart of interoperable telecommunications and data networks (most notably the internet) and of modern power grids. GPS positioning was the catalyst for adoption of the U.S. National Grid as a federal spatial interoperability standard for search-and-rescue and emergency response and by the SAE as a standard for commercial land mobility as well.
However, dependencies create vulnerabilities, and over-reliance on GPS has been cited as a potential Achilles heel for both national security and economic critical infrastructure. Efforts have been under way for several years by the U.S. Air Force to strengthen all aspects of GPS and, more recently, much attention has focused on making use of complementary technologies to increase the resilience and performance of integrated PNT devices.
Smartphone and autonomous vehicle developers have used such techniques for years to augment GPS for their applications. The awareness of value from ubiquitous access to precise position and time that was awakened by GPS in 1995 has now evolved into an understanding that diverse services from a broader PNT enterprise are necessary to preserve that access with assurance into the future.
Congress and the DoD have recognized that reality, with Congress directing and DoD implementing a DoD PNT Enterprise Oversight Council to manage future acquisition of PNT capabilities for the military. In August, the Department of Defense (DoD) also released a public version of its Strategy for the DoD PNT Enterprise, highlighting the processes it has created to implement resilient PNT for the Joint Force. Congress and the White House both have also recognized that the imperative for resilient PNT must be extended to domestic critical infrastructure, and this has resulted in direction to civil federal agencies to both strengthen and back up GPS use for their constituencies. It is now clear that GPS was the spark, and a multi-faceted PNT enterprise is the new reality.
Program enters integration and test phase on track to 2021 delivery
Raytheon Company’s GPS Next-Generation Operational Control System, known as GPS OCX, has completed full software and hardware development and entered the system integration and test phase. The milestone keeps GPS OCX, the enhanced ground control segment of a U.S. Air Force-led effort to modernize America’s GPS system, on track to meet its June 2021 contractual delivery deadline.
“GPS OCX is one of the largest, most complex software development programs in the Department of Defense, and we’re now in the home stretch toward full system delivery,” said Dave Wajsgras, president of Raytheon’s Intelligence, Information and Services business.
The GPS OCX team completed development of 1.5 million lines of software code, supported by a pivot to leading-edge commercial software development processes that began in 2016. Additionally, the team’s information assurance best practices helped the program achieve the highest level of cybersecurity protections of any DoD space system.
The U.S. Air Force used the cybersecure GPS OCX launch and checkout system, often referred to as Block 0, to launch the first modernized GPS III satellite into space in December 2018 and the second in August 2019.
The team’s focus for the remainder of 2019 is the delivery of the system’s new modernized receivers, which will measure and monitor legacy military and civilian signals sent by the current GPS satellite constellation plus the new signals sent by the next-generation GPS IIIs.
Ground antenna at Schriever Air Force Base, home of the 50th Space Wing. (Photo: Raytheon)
GPS OCX will maneuver satellite into final orbit over 10 days
The U.S. Air Force used Raytheon Company’s GPS Next-Generation Operational Control System, known as GPS OCX, to support the launch of its second GPS III satellite into space. The ground system will now spend 10 days maneuvering the satellite into its final orbit, demonstrating GPS OCX’s ability to simultaneously support multiple GPS III spacecraft on-orbit throughout the checkout and calibration process.
Raytheon’s GPS OCX has obtained the highest level of cybersecurity protections of any Department of Defense space system.
“GPS OCX performed extremely well during the first launch and has exceeded performance requirements in the months since,” said Dave Wajsgras, president of Raytheon Intelligence, Information and Services. “The team was well-prepared for this launch, and we’re confident the system’s performance will continue to be positive.”
GPS OCX, the enhanced ground control segment of America’s GPS system, has achieved the highest level of cybersecurity protections of any Department of Defense space system. Its open architecture design allows it to integrate advanced protections as they become available, and the system’s industry-leading cyber protections are why it will be used to support all future GPS III launches and GPS constellation operations upon operational acceptance.
Earlier this year, the team completed final qualification testing of the system’s modernized monitor station receivers, which can receive and decrypt all GPS III military and civil signals. Global installation of the receivers starts next month and keeps the program on track for full system delivery by the program’s June 2021 contractual deadline.
In addition to GPS OCX’s role, RGNext, a joint venture between Raytheon and General Dynamics Information Technology, provided operational launch support to ensure the safe launch of the United Launch Alliance’s Delta-IV rocket that was carrying the GPS III satellite. RGNext operates the launch range on behalf of the U.S. Air Force, providing maintenance, range safety, weather monitoring, communication and surveillance support for all launches conducted by defense, civil and commercial companies at the range. To access our press kit, which includes photos, videos and an animation, please visit us here. To learn more about the program’s progress and additional capabilities, visit us here.
The second GPS III satellite — nicknamed Magellan — is now at the launchpad at Cape Canaveral Air Force Station, Florida, in preparation for liftoff on Aug. 22.
United Launch Alliance tweeted out an image of the encapsulated satellite on its way to the rocket.
The Lockheed Martin-built satellite was originally scheduled for launch on July 25, but the launch was pushed to Aug. 22 because of “an anomaly during component testing at a supplier that created a cross-over concern. Upon further evaluation, additional time is needed to replace and retest the component on the launch vehicle,” ULA said.
Launch Updates
The launch window on Aug. 22 will open at 9 a.m. EDT (1300 UTC) and extend to 9:27 a.m. EDT (1327 UTC), a 27-minute duration. ULA’s live countdown blog begins at 11:45 p.m. EDT (0345 UTC) on Aug. 21. The launch webcast starts at 8:40 a.m. EDT (1240 UTC).
GPS III SV02 will be the 29th and final flight of the Delta IV Medium rocket, the 73rd GPS launch by a ULA or heritage vehicle and marks ULA’s 135th mission.
GPS III SV02 is named Magellan in honor of the Portuguese explorer who led the first expedition to circumnavigate the Earth.
The satellite, encapsulated in the 4-meter-diameter composite payload fairing, was moved overnight last week from its processing facility to the seaside launchpad at a top speed never exceeding 5 mph.
The satellite was hauled by a motorized KAMAG Elevating Platform Transporter (EPT) that provided hydraulic leveling and precision positioning capabilities along the route. The EPT also towed a Portable Environmental Control System (PECS) trailer to supply conditioned air to the payload fairing during the trip.
Once parked in the hoistway on the backside of the Mobile Service Tower (MST), technicians used the crane system in the gantry the next morning to carefully lift the satellite onto the Delta IV rocket’s second stage to complete a successful vertical integration of the launch vehicle and payload. The fully assembled rocket now stands 207 feet tall.
A tip-to-tail electrical test of the combined payload and launch vehicle will occur next, an operation known as the Integrated Systems Test (IST). Once that is completed, the comprehensive process to verify flight readiness will begin in parallel to final vehicle closeouts for the launch targeted for Aug. 22 at 9 a.m. EDT (1300 UTC).
ULA rockets have successfully launched 70 GPS satellites since 1978.
ULA technicians transport the GPS III satellite to the Delta IV launchpad. (Photo: United Launch Alliance)The Delta IV rocket leaves the the Horizontal Integration Facility (HIF) aboard a 36-wheel, diesel-powered transporter on May 28 and traveled to Space Launch Complex-37. The trip took 40 minutes. (Photo: ULA)
New technology makes GPS more secure and reliable for military systems.
Raytheon has received security certification for new GPS modules and receivers from the GPS Directorate at the U.S. Air Force Space and Missile Systems Center.
The new modules and receivers will give military aircraft, ships, ground vehicles and weapon systems secure and reliable access to modernized GPS.
“Because GPS is under constant attack, we worked with our government partners to create new M-code modules and receivers that give the military secure and resilient navigation systems,” said Eric Ditmars, vice president of Raytheon’s Secure Sensor Solutions. “And since the tech is platform agnostic, it will work on a wide-range of platforms in the air, on the ground or at sea.”
Raytheon’s military code common GPS module was certified, along with its ground-based GPS receiver, or GB-GRAM, and the avionics GPS receiver, or GRAM-S/M. GB-GRAM and GRAM S/M are jointly developed with Trimble, while General Dynamics provides cryptographic capabilities for the modules.
“Operators need a system that is flexible and fast,” said Chad Pillsbury, director of Resilient Navigation at Raytheon Space and Airborne Systems. “We’ve designed these GPS systems with a common security architecture — meaning we can get this capability in the hands of operators faster and eliminate the need for additional security certifications.”