Hydro-Tech has unveiled the MS400C, a fully integrated multibeam echosounder designed for uncrewed surface vessels. The new system combines sonar processing, inertial navigation, GNSS positioning and sound velocity sensing into a single unit.
The MS400C seeks to address deployment challenges faced by USV operators during hydrographic surveying. Its compact, lightweight design allows direct mounting on small platforms. Installation involves connecting a few cables to the IPC and power supply and to the primary and secondary GNSS antennas. With preconfigured spatial relationships, operators can deploy and start surveying quickly, reducing configuration errors and ensuring consistent data quality. Equipped with Auto Survey functionality, the system calibrates parameters based on water conditions, which streamlines pre-survey procedures. Real-time roll compensation and attitude data from the internal IMU, combined with sound velocity profiling, ensure high-fidelity depth measurements, even in dynamic conditions. Designed for autonomous and remotely operated survey platforms, the MS400C supports data collection in confined waterways.
The fire at an electrical substation that shut down London’s Heathrow Airport, Europe’s busiest hub, for 18 hours on March 21 was one of many periodic reminders of the vulnerability of much of our critical infrastructure to a single point of failure (SPOF). A previous one was the CrowdStrike software bug that disrupted hospitals, airlines, banks and scores of other businesses and services around the world on July 19, 2024. Think of the impact on your home or business if the power went out for hours or days, and you did not have a backup generator and/or solar panels.
Our society’s and economy’s enormous reliance on global navigation satellite systems (GNSS) for positioning, navigation and timing (PNT) makes GNSS a huge SPOF. Hence repeated and urgent calls for increasing the resilience of GNSS and for developing complementary and/or alternative sources of PNT (or, to use the mantra of the National Space-Based Positioning, Navigation and Timing Advisory Board in recent years, to “protect, toughen and augment” GNSS).
Yet, at least two existing directives for strengthening PNT have not been implemented: The National Timing Resilience and Security Act of 2018 directed the U.S. Department of Transportation to ensure establishment of at least one terrestrial timing system as a backup for GPS signals, and President Trump’s January 2021 Space Policy Directive 7 ordered the entire U.S. government to “identify and implement … alternative sources of PNT for critical infrastructure, key resources and mission-essential functions.”
Awareness of the key importance and vulnerabilities of GNSS and of the urgent need to develop complementary and/or alternative technologies has reached the U.S. Federal Communications Commission (FCC). It dedicated its March 27 open meeting to hearing recommendations on “promoting the development of PNT technologies and solutions,” which it deems “crucial for national security, public safety and economic stability.”
The Notice of Inquiry (NOI) that the FCC issued in preparation for the meeting is a thorough and very useful compilation of relevant policies, programs, initiatives, reports and policy documents. I highly recommend reading it. Clearly, the commission did its homework — in the footnotes, it cited four GPS World articles among its sources — and demonstrated that it understands the key challenges for GNSS, the options for complementary/alternative systems and the relevant policy history. (See Dana Goward’s March 7 article on this at gpsworld.com/fcc-to-meet-on-gps-alternatives/) The NOI also posed 94 questions to which the FCC seeks answers.
The FCC meeting, available on YouTube, was of great importance to the whole GNSS/PNT community. While the commissioners did not vote to support any existing or proposed PNT system, they engaged in a broad discussion of the issues and heard petitions from NextNav and the National Association of Broadcasters (NAB) related to the provision of nationwide PNT services. NextNav requested spectrum for its project to work with telecom providers. NAB sought to accelerate and mandate implementation of the new ATSC 3.0 television broadcast format, which includes signals for its Broadcast Positioning System.
Teledyne Marine has launched the Teledyne Compact Navigator, an ultra-compact autonomous integrated navigation system engineered for subsea and surface vehicles. It is ideal for small vehicles, enabling inspection and survey operations on compact platforms. The system is offered in two depth-rated models, one capable of operating at 4,000 m and another at 300 m. The Compact Navigator consumes less than seven watts of power, extending mission duration by conserving energy. The system operates fully autonomously, eliminating the need for external aiding or operator intervention. Advanced phased array Doppler Velocity Log (DVL) technology enhances performance while allowing the device to be mounted on an autonomous underwater vehicle or ship hull.
Compact Navigator supports a broad range of applications, including ROVs, AUVs, shallow water surface navigation, operations in GNSS-denied environments and dynamic positioning for surface vehicles. The system provides true North-seeking gyrocompass-grade performance, and its web-based user interface supports integration, operation, and troubleshooting. It is factory-calibrated and offers a battery backup option for reliability in demanding conditions. The system operates independently of satellite signals, making it resistant to jamming or signal loss. This capability is significant for shallow water navigation, where GNSS-based systems may be unreliable.
GPS World is celebrating its 35th birthday in 2025 by welcoming back longtime editor Tracy Cozzens as Editor-at-Large.
A subsidiary of Cleveland-based North Coast Media, GPS World is a business-to-business media brand covering GPS, GNSS and Complementary positioning, navigation and timing solutions and trends.
“Serving this highly technical market for 20 years, I have been privileged to build wonderful relationships with many technology innovators,” Cozzens said. “I simply couldn’t stay away from what I know — GPS, GNSS and PNT — and whom I know. There’s nothing like our industry when it comes to non-stop technology breakthroughs that broadly advance our world.”
Cozzens returns to bring her deep industry insight and editorial leadership at a time when rapid innovation is reshaping GNSS/PNT landscapes.
“As a 35th birthday gift to our loyal family of GPS World marketing partners, and unmatched audience of readers — qualified/audited GPS/GNSS/PNT buyers and specifiers — we wooed Tracy Cozzens out of retirement,” said GPS World Sales Director Tod McCloskey. “Tracy’s award-winning gumshoe reporting and stellar content-creation skills for decades have helped keep industry leaders informed on GPS, GNSS and PNT technology trends. Now, Tracy also will help shape the content calendars for GPS World’s market-leading magazine, website, e-newsletters and social media.”
Cozzens will report directly to GPS World Editor Diane Sofranec.
Read a roundup of recent products in the GNSS and inertial positioning industry from the April 2025 issue of GPS World magazine.
OEM
INS With three additional GNSS receiver variants
Photo: Topcon
SBG Systems has upgraded its inertial navigation systems — Ekinox, Apogee and Navsight — with new GNSS receiver options. The latest update introduces three additional GNSS receiver variants.
These include:
Marinestar, which supports Fugro Marinestar, delivering precise point positioning (PPP) with centimeter-level accuracy via L-band corrections without requiring a base station. It is optimized for marine applications.
HAS Ready / NavIC, which includes Galileo E6 support for the upcoming Galileo High Accuracy Service (HAS), offering free decimeter-level PPP corrections globally. Additionally, it supports the Indian NavIC system.
Centimeter-Level Augmentation Service, which is tailored for users in Japan; this variant utilizes QZSS L6 signals to provide free PPP corrections without external services.
All GNSS variants integrate seamlessly with SBG Systems’ antenna portfolio and Qinertia post-processing software. Users select the appropriate GNSS variant at purchase to match their operational requirements. These enhancements aim to provide versatile solutions across diverse industries while ensuring reliable performance.
The GNSS receivers in the Teseo VI family use multi-constellation and quad-band signal processing on a single chip, achieving centimeter-level accuracy for various applications. The Teseo VI family includes the STA8600A and STA8610A models. These receivers are designed for automotive applications such as advanced driver assistance systems and autonomous driving, as well as industrial uses, including asset tracking, mobile robots and precision agriculture.
The Teseo VI+ variant can host enhanced positioning engines developed by third-party companies, providing real-time kinematics for centimeter position accuracy.
The LG680P is a multi-constellation, quad-band GNSS module designed for high-precision positioning and to enhance signal quality and precision through concurrent reception of L1, L2 and L5 frequency bands. It supports Galileo E6, QZSS L6 and BDS B2b signals for precise point positioning, ensuring horizontal accuracy of up to 0.8 cm + 1 ppm without requiring local or broadband connectivity.
To ensure signal integrity in environments with electromagnetic interference, the module features professional-grade anti-jamming technology, including built-in NIC algorithms that suppress narrow-band interference. It supports external active antennas for enhanced signal reception and positioning accuracy. It is ideal for applications such as autonomous lawnmowers, delivery robots, surveying equipment and precision agriculture. Quectel complements it with two external GNSS antennas: the YEGR001W8AH geodetic antenna and the YEGD006U1A compact patch antenna.
The New Ellipse firmware upgrade for the Ellipse product line allows the system to now be used as an attitude and heading reference system or inertial navigation system. It is designed to enhance navigation, attitude and heave performance for stable and accurate positioning, even in challenging conditions.
It introduces advanced GNSS-denied capabilities, featuring newly integrated flags that trigger when GNSS jamming or spoofing threats are detected. This allows users to reject or re-enable external sensors — such as GNSS — without resetting the filter. The user-friendly interface allows for fast and flexible configuration using simple command lines, enabling users to tailor the Ellipse to their specific needs and applications.
Localization Solution Operates in GNSS-denied environments
Photo: OxTS
WayFinder is a localization solution designed for GNSS-denied environments. It integrates a GNSS/INS system, onboard processor, lidar scanner and two cameras, enabling precise navigation in areas with limited satellite coverage. The system features Lidar Boost, a software technology that enhances GNSS/INS performance by processing lidar data to compensate for missing or inaccurate GNSS updates in real time. This ensures high-accuracy localization and seamless transitions between GNSS-supported and GNSS-denied environments.
WayFinder enables precise navigation for autonomous vehicles in ports, mining and indoor automotive testing without fixed infrastructure. It also provides reliable positioning for surveyors in areas with limited GNSS coverage.
Virtual Surveyor Version 10 introduces Basic Topographic Design tools, allowing users to document terrain changes such as graded roads, water ponds and building surfaces. The software now features four subscription plans — Valley, Ridge, Mountain and Peak.
Ridge plan: Focuses on surveying a single moment in time using one drone data set.
Mountain plan: Adds Timelines to compare surveys across different times, visualizing changes through Time Steps.
Peak plan: Includes advanced Topographic Design tools for planning future structures by creating new Time Steps. These tools allow users to design features such as roads or ponds directly on UAV-derived models, with automated alignment and volume calculations for cut-and-fill operations.
Version 10 introduces drawing guides, available in the Ridge plan and above, enabling precise drawing of points at specific intervals or angles. Walk Mode, included in all plans, allows users to explore 3D terrain at ground level for better visualization. Timelines, featured in the Mountain and Peak plans, facilitate the comparison of multiple surveys conducted at different times and the integration of future designs. These improvements seek to streamline processes for engineering surveyors, supporting applications in construction, mining and water management.
The Jupiter Laser RTK integrates GNSS, auto-IMU, laser and dual camera systems into a single unit. It incorporates a precise green laser that remains visible even in bright daylight. This feature allows for precise measurements of points in hard-to-reach, signal-blocked or potentially hazardous locations. It also features a night vision camera, allowing users to see feature points even in low-light conditions. The RTK system’s laser range is up to 50 m, making it suitable for challenging surveying environments. It incorporates visual technology to offer surveyors an immersive experience during surveying and stakeout operations, improving working efficiency and productivity.
Version 2.1.0 of AgEagle Aerial Systems’ eBee VISION application software introduces circular and grid mapping features, allowing users to generate 2D or 3D maps using external post-processing software for more comprehensive geospatial data.
The eBee VISION 2.1.0 can continue missions in GNSS-denied environments and allows manual deactivation of GNSS to prevent jamming or spoofing. It implements the STANAG 4609 standard, the official format for motion imagery exchange within the NATO nations. This involves embedding UAV position and camera information into the videos recorded by the UAV and those broadcasted by the Ground Control Station. Its inclusion in the system seeks to enhance interoperability with third-party applications, which is key for military-grade UAVs.
It offers enhanced control over the Silent Tactical Landing feature. Users can now manually adjust the landing position on the map, with the system providing range estimates to inform operators of the UAV’s reach. This functionality offers greater flexibility in mission planning and execution, particularly in tactical scenarios requiring precise landing control. The system is ideal for defense, public safety and utilities applications.
‘Drone-in-a-Box’ Solution Designed for vehicle-mounted deployments
Photo: DJI
The DJI Dock 3 “drone-in-a-box” solution is designed for vehicle-mounted deployments and 24/7 remote operations in various environments. This system is compatible with the Matrice 4D and Matrice 4TD UAVs, which feature advanced cameras and IP-rated protection for challenging conditions. The UAVs are ideal for public safety, emergency response and infrastructure inspection.
This system supports flexible deployment options, including vehicle-mounted setups optimized for emergency operations and long-distance inspections. It enables horizontal calibration and cloud-based dock location adjustments. Two docks can be mounted on a single vehicle to facilitate dual-UAV rotations for enhanced efficiency. In fixed deployments, the D-RTK 3 Relay Fixed Deployment Version can be added to improve video transmission and satellite connectivity.
The Matrice 4D and 4TD UAVs have a wide-angle camera, medium tele camera, tele camera and laser range finder. The Matrice 4D features an advanced camera suite designed for high-precision mapping. The Matrice 4TD includes an infrared thermal camera for public safety and emergency response applications. The system includes a Flight Termination System to support regulatory compliance in strictly controlled airspace. This system can manually or automatically stop drone operations if necessary.
Casia G Release 4.0 is a software update that enables nighttime detection of aircraft, allowing 24/7 beyond visual line of sight (BVLOS) UAS operations. The update supports BVLOS flights up to 400 ft at night without requiring hardware modifications, offering detection of both cooperative and non-cooperative aircraft. The system detects aircraft at distances of up to 16.7 km with 360° coverage, ensuring safe nighttime operations. When multiple units are used, triangulation technology provides accurate range, altitude and satellite data for intruding aircraft. The update leverages existing hardware to detect navigation and anti-collision lights at night.
The MAS10 is a 77 GHz FMCW marine radar system designed to enhance navigation safety in congested environments under all weather conditions. The ultra-high-definition W-band radar provides centimeter-level resolution, enabling vessels to detect and identify small hazards in heavily trafficked waterways.
Unlike optical and infrared sensors, W-band radar technology penetrates fog, heavy rain and snow, ensuring reliable detection. It operates effectively in low-visibility scenarios, including complete darkness, intense sunlight and shadowed areas where cameras and lidar may struggle.
The Eagle Series line of spatial 3D scanners feature lidar and imaging sensors and are designed for various applications, including reverse engineering, digital twinning, asset management, extended reality, precision mapping and 3D printing.
The series offers scanning capabilities with a range of up to 140 m and precision within 2 cm at 10 m. The lightweight scanner is designed for portability, with a built-in battery providing up to one hour of continuous use.
The scanners are available in Standard and Max versions. The Max model features four 48 MP cameras, enhancing scanning efficiency and producing vivid 8 K panoramic photos. With a point cloud frequency of 200,000 points per second, the Eagle Series is designed for applications requiring highly detailed spatial data.
Upgraded Mapping Package With Google Maps downloads
Photo: Golden Software
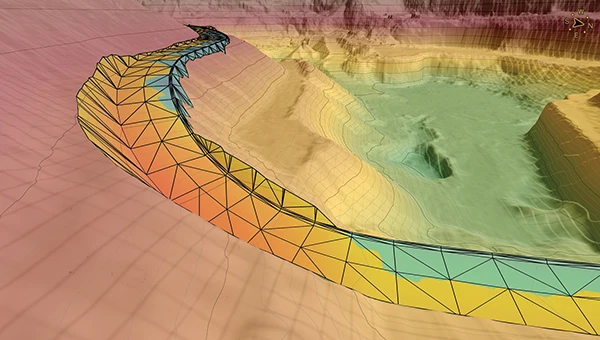
Golden Software has upgraded its Surfer mapping and 3D visualization software. Users can now directly download georeferenced aerial and satellite imagery from Google Maps into projects. The latest version also improves 3D visualization tools, focusing on faster and more intuitive creation of visual models. Users can now colorize 3D drill hole intervals based on text keywords, making it easier to interpret subsurface data. Additionally, contour slices can now be added to the 3D view, offering a clearer representation of data layers.
Golden Software has released a beta version (30.0.135) that introduces multiple light sources for improved 3D viewing and customizable legends for better map presentation. These updates are designed to streamline workflows for professionals in industries such as environmental consulting, resource exploration and geospatial analysis, simplifying the creation of professional-grade maps and models efficiently.
FAA regulations require drone enthusiasts and commercial operators to equip their unmanned aircraft with approved remote identification (RID) capability. Following the FAA’s deadline on March 24, 2024, each registered drone in U.S. airspace is required to transmit its location, operator information, altitude, velocity and registration code. This data can be utilized to identify the drone’s operator. Additionally, most drones will need to include a timestamp for data synchronization and an emergency status indicator if necessary.
As a concession to purely recreational drone flyers, the FAA allows local organizations to designate and register an area as a reserved location for drone flying — an FAA-recognized Identification Area (FRIA) — and drones flown only in such locations are exempt from the RID regulation. As of September 2023, manufacturers are required to only sell drones with RID capability, and owners of older drones can purchase RID devices to add to their equipment. Some come with an internal GPS, but others connect to existing onboard GNSS receivers.
Given this RID-equipped population of drones, AeroDefense in Oceanport, New Jersey, has come up with an inexpensive way of locating legal drones and providing tracking information by providing an area monitoring system. Drone incursions into controlled airspace are not all malicious in nature— in fact, most have turned out to be accidental. So, a low-cost capability, such as the AirWarden Essential system, can be helpful to many facilities wishing to know what drones are in their airspace.
An AirWarden receiver mounted on a pole with a clear view of the sky above the monitored area can capture broadcast transmissions from drones flying overhead. the information is transmitted to a display system that highlights RID-equipped drones in the monitored area, showing not only the altitude and direction of the drones but also the operator’s identity and the location from which the drone was launched. The data can be downloaded to the internet, so facility personnel can also receive incursion warnings remotely, if they happen to be away from the facility. Otherwise, the system provides real-time alerts to your chosen display, along with a tracking history and the location of the launch point.
AeroDefense identifies several key locations for this system, including correctional facilities, venues such as stadiums and large outdoor gathering spots, airports, military bases, critical infrastructure such as power and water distribution centers, and industrial complexes.
What about non-RID drones, which can spy on technology, gather sensitive information, conduct reconnaissance of military facilities, smuggle contraband into correctional facilities, or even damage infrastructure? These drones can operate outside the law and evade FAA regulations. AirWarden indeed offers extensions that facilitate RF detection of both drone control and data transmissions, along with tracking the direction of drone movement. Combined with radar, the system becomes a robust detection solution for both RID and non-RID drones.
Mayman Aerospace in Long Beach, California, has developed a jet-powered vertical take-off and landing (VTOL) cargo drone. It needs only 10’ x 10’ to take off and land, and in flight, it is claimed to be able to reach 500mph (Mach 0.75) and operate at 20,000 ft.
Razor VTOL drone with vectoring jet-powered thrust. (Photo: Mayman)
The Razor VTOL features gimballed, jet-powered thrust for takeoff and landing and a high-speed sprint speed for fast deliveries on the battlefield. The initial application might be for the Department of Defense, but Mayman anticipates that other commercial applications already exist for rapid 50-lb cargo transit.
And Mayman describes other capabilities as including artificial GPS-denied navigation and autonomous control for reliability and accuracy in areas where signal jamming is present. The aircraft has an automatic abort/land capability in the event of catastrophic failure.
This new intelligent vehicle appears capable of various applications, including fast cargo transit, Intelligence, Surveillance, Target Acquisition and Reconnaissance (ISTAR), disaster recovery, serving as a low-cost maneuverable airborne target for pilot training and even functioning as an attack drone.
While recent sky-filled drone incursions have been highly reported and publicized, another means to help detect and locate their operators cannot come at a better time. The AirWarden system appears to have a lot of promise, notwithstanding that radar, RF and acoustic detection systems may also be required for “illegal” drones. Thrust-vectoring, cargo carrying and autonomy in a drone are not just a novel combination, these capabilities do appear to have a great deal of promise for both military and commercial operations.
Advanced Navigation, an Australia-based company, is expanding its presence in the United States by actively recruiting military veterans. The company aims to leverage the unique expertise of former service members to enhance its mission-critical technologies and address the growing demand for assured positioning, navigation and timing (APNT) capabilities across defense, aerospace and critical infrastructure sectors.
Wayne Prender, former U.S. Army captain and head of global defense at Advanced Navigation, believes warfighters-turned-technologists are central to this mission.
“Veterans bring more than technical expertise; they understand firsthand the urgency and complexities of navigation in contested spaces. Their experience directly informs how we design, test and implement solutions, delivering capabilities that genuinely enhance mission outcomes and warfighter safety,” said Prender.
The company recruits veterans with operational backgrounds in submarines, special operations, aviation and electronic warfare to apply their expertise to APNT applications — including unmanned systems, advanced radar, precision strike platforms and secure battlefield communications. Advanced Navigation’s veteran-led business development team collaborates closely with system integrators, program offices and military end users to deliver tailored APNT solutions that meet rigorous performance standards.
NV5 is celebrating two decades of delivering critical geospatial services to the National Oceanic and Atmospheric Administration (NOAA).
For the past 20 years, NV5 has completed more than 220 contracts across 30 states, covering more than 50,000 square miles. These projects involve topobathymetric surface modeling of shorelines, bays, estuaries, lakes, wetlands, rivers and streams to provide detailed data for various applications. The information generated helps NOAA protect and restore natural resources and habitats, update nautical charts and understand the effects of environmental and human-induced changes over time.
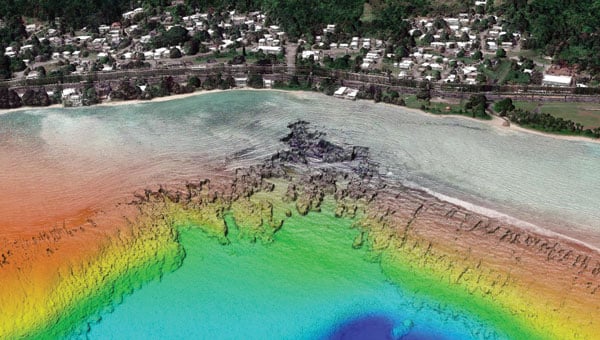
A screenshot from the NOAA ENC Viewer of the updated nautical chart of southern Lake Michigan, created using multibeam bathymetry and backscatter data. (Photo: NOAA)
The company employs airborne remote sensing technologies, such as topobathymetric laser scanning, to capture near real-time changes in nearshore topography and bathymetry. Additionally, NV5 integrates marine vessel-based technologies, such as multibeam echo sounding, to map offshore bathymetry, including sand resources, essential fish habitats and historic shipwrecks.
“Our collaborations with NOAA over the past 20 years have yielded many important insights and baseline data that helps the agency with its core mission of climate monitoring, coastal restoration and supporting marine commerce – all of which supports our nation’s economic vitality and affects more than one-third of America’s gross domestic product,” Dave Bernstein, vice president of hydrospatial operations at NV5, said.
The National Geodetic Survey Remote Sensing Division’s Coastal Mapping Program requires the collection of airborne topographic/bathymetric lidar and digital camera imagery data to enable accurate and consistent measurement of the national shoreline following Hurricane Sandy’s landfall. (Photo: NV5)
In one notable project, NV5 conducted a large-scale hydrographic survey in southern Lake Michigan for NOAA’s Office of Coast Survey. The survey covered 481 square nautical miles from northeast Chicago to Michigan City, Indiana — an area that had not been surveyed since the late 1940s. Using multibeam bathymetry and backscatter data, NV5 updated NOAA nautical charting products to improve maritime safety along the Michigan, Indiana and Illinois shorelines. Under NOAA’s Office for Coastal Management contract, NV5 also provided certified hydrographer expertise aboard the Pisces (R226), a NOAA fisheries research vessel. These efforts included overseeing the collection and processing of hydrographic data for marine habitat mapping.
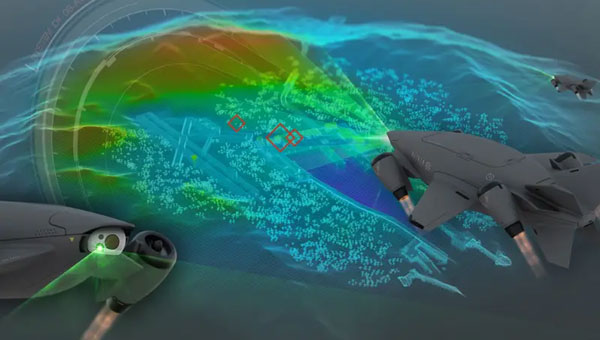
A view looking south at the Submarine Canyon on Asan Point, Guam. The image was created from the lidar bare earth model and lidar point cloud colored by elevation and RGB values from imagery respectively. (Photo: Partnership between NV5 and Woolpert)
NV5 has also contributed to NOAA’s Coastal Change Analysis Program through projects that utilized aerial multispectral imagery and machine learning techniques. In Rhode Island, NV5 partnered with the National Estuarine Research Reserve System to study salt marsh habitats and produce change mapping products.
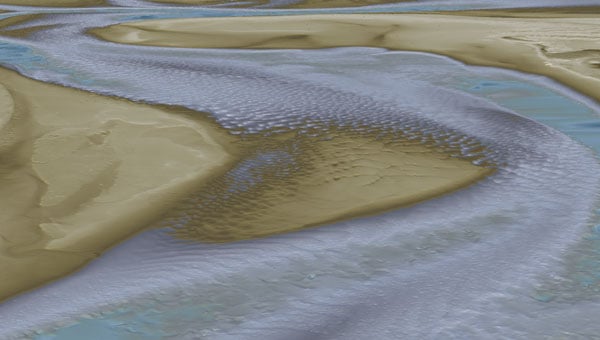
A view looking northeast from Virginia Key shows the topobathymetric surface of the intertidal zone near Fisher Island, Florida. (Photo: Nicholas Klein / iStock / Getty Images Plus / Getty Images)
Similarly, high-resolution land cover products were created for Brown County, Wisconsin, and key watersheds to assess urban growth, map wetlands, delineate wildlife habitats and monitor land cover changes over time. Other initiatives include mapping eelgrass habitats along coastal Massachusetts using multispectral aerial imagery and analyzing satellite imagery for wetland changes in the Great Lakes region.
Through these diverse projects, NV5 continues to provide NOAA with essential geospatial data that supports its mission of environmental stewardship and maritime safety while contributing to national economic vitality.
TDK Corp. recently revealed that its subsidiary, Tronics Microsystems, will exhibit at the Offshore Technology Conference 2025 from May 5-8. The event will take place at NRG Park in Houston, Texas, and will feature a wide range of solutions for the future of offshore energy.
Tronics will showcase its high-performance MEMS inertial sensors and a high-temperature MEMS accelerometer for inclination measurement in directional drilling applications. The company recently unveiled the AXO314, its latest addition to the Tronics AXO300 accelerometer platform. This digital MEMS accelerometer is designed for industrial applications operating under shock and vibration, with a ±14 g input range.
Leveraging a strong track record in serving demanding aerospace and railway markets, Tronics will demonstrate how its closed-loop sensor’s architecture assists drilling guidance tools to operate under high temperature, vibrations and shock conditions.
Attendees can attend a live demo of a miniature north-seeking MEMS gyroscope, enabling precise azimuth measurement in downhole survey tools, according to the company.
Swift Navigation‘s Skylark Precise Positioning Service now offers continuous two-centimeter accuracy across Western Europe, enabling the deployment of reliable consumer robots and digital mapping solutions.
Autonomous robots and field mapping applications require precise positioning to operate efficiently; traditional RTK solutions can often struggle, forcing robotics manufacturers to use local base stations or fragmented networks, which can lead to coverage gaps and inconsistent performance. Field teams in utilities and construction also require survey-grade accuracy without the high costs of professional equipment.
Skylark addresses these issues by delivering accuracy across geographic areas, eliminating the need for base stations or switching between providers. Skylark uses a proprietary atmospheric model that compensates for ionospheric and tropospheric effects in real-time. The carrier-grade network, operated by mobile network providers, ensures reliability across regions.
Skylark is available in three variants — Nx RTK, Cx, and Dx — designed to meet varying requirements for accuracy, power consumption, data transmission and cost. The Skylark Nx RTK delivers one-to-two centimeter accuracy across 28 countries in Western Europe and seven countries in Eastern Europe. Compatible with standard RTK receivers and supported by portals for credential management, licensing and usage analytics, Skylark Nx RTK integrates high-precision positioning into existing devices and workflows.
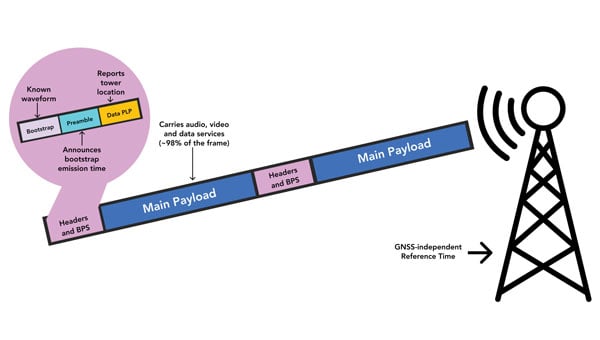
More than 20 years ago, in these pages, we referred to television broadcast signals as “signals of opportunity” that might be used for positioning, navigation and timing (PNT). Since then, several other signals with a different primary purpose have also been considered as sources of PNT, and some have been used routinely for years now, such as WiFi routers for indoor navigation. On Feb. 26, 2025, the National Association of Broadcasters (NAB) filed a petition for rulemaking with the Federal Communications Commission (FCC) for television to transition to a new standard, ATSC 3.0, that enables what they call Broadcast Positioning System (BPS), as a way to enhance GPS resiliency. I asked NAB’s chief technology officer and executive vice president, Sam Matheny, to answer a few questions about the organization’s proposal. In next month’s issue, we will present a different perspective on it.
Question: Briefly, what is the history of the relevant standards?
Answer: The Advanced Television Systems Committee (ATSC) is an international standards development organization. ATSC developed ATSC 3.0 as the “next-gen” standard, and the International Telecommunications Union (ITU) adopted it as a recommended digital broadcast standard in 2020. Broadcasters in the United States began experimental ATSC 3.0 transmissions in 2016, and there are currently more than 100 transmitters broadcasting in 80 markets. Other nations currently using or considering ATSC 3.0 include Brazil, India, South Korea, Canada, Mexico, Jamaica and Trinidad and Tobago. NAB’s petition to the FCC requests permission to fully transition to ATSC 3.0 by 2030.
Q: Briefly, what is the history of the BPS project/proposal?
A: BPS is a datacast application that uses ATSC 3.0. We at NAB authored a seminal paper on BPS in 2021 and built our first prototype in 2022. We put our second prototype on the air in 2023. We signed a Cooperative Research and Development Agreement (CRADA) with the National Institute of Standards and Technology (NIST) in 2024 and published our first joint paper earlier this year. The paper concludes that “the stability of BPS time transfer is comparable to or better than GNSS, making BPS a viable complementary PNT solution when GNSS is unavailable.”
Our petition to the FCC highlights a transition to ATSC 3.0 that enables the nationwide deployment of BPS.
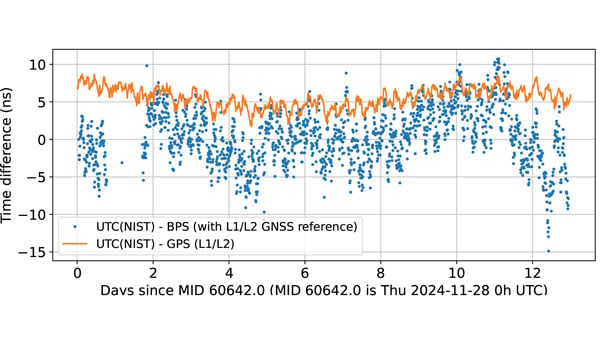
BPS time is comparable to dual band GPS (L1/L2) time. The data are recorded as 10-minute averages. (Graphic: National Association of Broadcasters)
Q: What is the motivation for broadcasters to implement BPS? What’s in it for them?
A: BPS will further secure television broadcasters’ role in the fabric of U.S. telecommunications. We also witnessed the innovation around GPS, with more than 7 billion GPS receivers being built into myriad devices. We’d like to see BPS experience similar innovation, which will bring new business opportunities. We believe that there is an opportunity for a public-private partnership with the government to deploy BPS for economic and national security.
Q: What have your tests so far shown regarding the timing accuracy of your signals? How much more R&D is required?
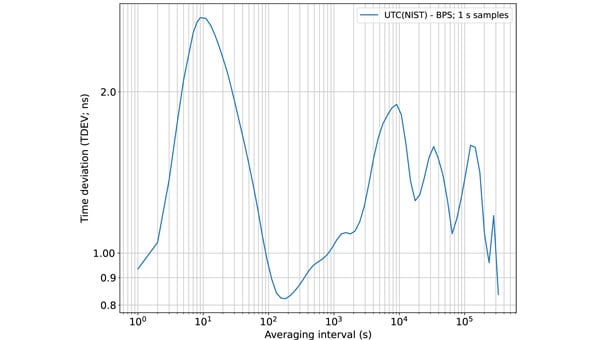
A: We’ve completed a wide variety of testing over the years, but probably of most interest is the work done with NIST. They ran common-view experiments using the BPS signal transmitted from KWGN, a TV station in Denver. Receivers were placed at two different facilities equipped with NIST timescale. Their Boulder facility is 30 km away with non-line-of-sight (NLOS) propagation, and their Fort Collins facility is 106 km away with line-of-sight propagation. A 21-day-long test showed that the time deviation (TDEV) statistics were better than 2 ns for all intervals. NIST also tested the stability of the NLOS signal alone at the Boulder facility and found that the TDEV statistics were better than 3 ns.
Q: How can BPS help improve GNSS resilience and integrity?
A: BPS functions completely independent of GNSS, so in the event of an acute GNSS disruption or catastrophic outage, BPS can be a resilient secondary source of timing for critical infrastructure (CI). Integrating BPS into CI applications also makes GPS a less attractive target for intentional disruption. Additionally, being independent means that BPS and GPS can work together in a hybrid mode, where, for example, BPS can help detect jamming and spoofing of GPS.
Time deviation (TDEV) statistics of BPS is less than 3 ns, even for the NLOS test scenario. (Graphic: National Association of Broadcasters))
Q: What are the main benefits of BPS?
A: The key benefits of BPS include:
Existing infrastructure: BPS leverages existing television transmission infrastructure making it low cost and easy to deploy. There are more than 1,700 full power TV stations on the air today. These stations, considered critical infrastructure, are designed to stay on the air on a 24 x 7 x 365 basis, including during emergencies.
Nationwide coverage: Television transmissions are “high-power/high-tower” signals that provide nationwide coverage. Their broadcast power can be up to 1 MW and from towers up to 2,000 feet tall. The signals can be received NLOS, including indoors. The strength of these signals makes them difficult to jam or spoof.
Frequency diversity: Television in the United States operates on 210 MHz of licensed spectrum divided into 35 6-MHz channels. There are multiple stations/channels in each market, which offer geographic diversity along with frequency diversity.
Passive receivers: BPS is a broadcast service, just like GPS, and supports an unlimited number of simultaneous users with no bottlenecks or two-way connectivity dependencies.
Standards-based: BPS is based on ATSC 3.0, an ITU-recommended digital terrestrial broadcast standard with the support of a global community and supply chain.
Independent: BPS operates completely independent of GNSS and is a self-synchronizing network that does not rely on Internet or cellular connectivity.
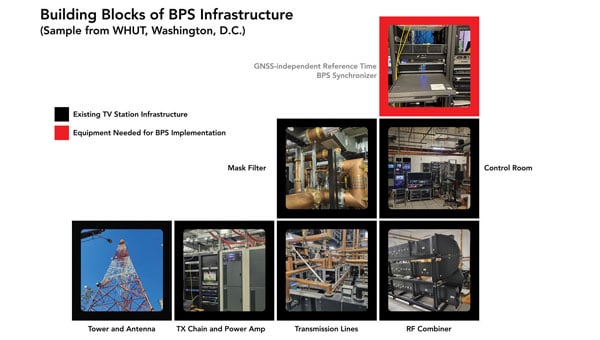
BPS Installation at WHUT. TV transmission infrastructure is already built out. Only a BPS synchronizer and a reference timing source need to be added. (Graphic: National Association of Broadcasters))
Q: What are the main initial use cases? What are some additional ones that might come later?
A: The initial use case is providing resilient time to CI, which includes the power grid, cellular communications, and financial and data centers. A 2019 NIST study estimated the economic risk of losing GPS at $1 billion a day, and in 2024 a National Security Space Association study said the impact of a disruption or loss would be incalculable, so addressing this CI need is vital. Longer term, we see hybrid applications where BPS and GPS are used together. BPS can be leveraged for GPS health monitoring, which could be especially useful for transportation systems and can help identify and mitigate compromised GPS service. Going further, we see applications for positioning and navigation, plus other data services such as AGPS, GPS validation and RTK.
Q: How will the BPS service be monitored after full deployment?
A: NAB has developed a cloud-based network operations center (NOC) to monitor the health of the BPS-enabled TV stations. As part of our leader-follower construct, TV stations in the BPS mesh network measure each other’s emissions and send the data to the NOC, which can identify any issues.
Q: Which television manufacturers have expressed interest so far?
A: Hisense, LG, Panasonic, Samsung, Sony and TCL are already selling NEXTGEN TV sets. It is important to note that these televisions don’t use BPS. They ignore the BPS data and pay attention to the audio and video payload. The reverse is true for a BPS receiver; it ignores the audio and video and simply uses the BPS data. Both services rely on ATSC 3.0, but they use different parts of the signal.
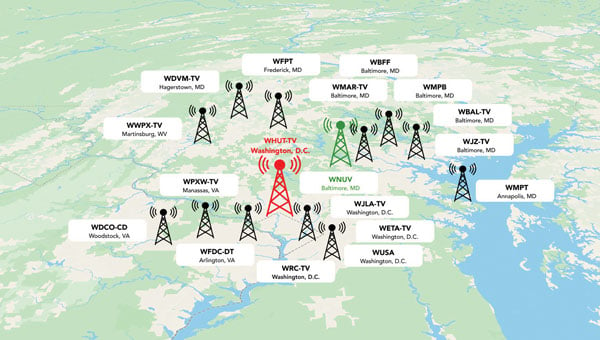
BPS leader-follower mesh network example. WHUT is configured as a leader tower, and WNUV is set up as a follower tower deriving traceable time from WHUT’s signal. At full deployment, the remaining 12 towers in the DC-Baltimore area can also follow WHUT. (Graphic: National Association of Broadcasters))
Q: Have you talked to any GNSS receiver manufacturers yet?
A: Yes, we have healthy interest from numerous receiver manufacturers. They see BPS as a nice addition to their product lineups. Conversations have focused on performance and integration.
Q: Are there any technical, commercial or legal arguments against BPS? Do you anticipate resistance to your proposal from any quarters?
A: We have not heard any such arguments against BPS. To the contrary, people have been intrigued and supportive of the concept. Recognizing that BPS requires transition to ATSC 3.0, some groups have expressed concerns over the television set upgrade cost for low-income viewers. However, ATSC 3.0 receiver accessories retail for less than $100 today, and prices will drop further with scale.
Q: How does your proposal address backward compatibility?
A: NAB’s petition calls for all television stations to transition to ATSC 3.0 and for all television sets to be equipped to receive ATSC 3.0. As mentioned earlier, millions of NEXTGEN TV sets are already being purchased, so our petition aligns with natural product replacement cycles, including low-cost converters for older TVs.
Q: What is your arrangement and division of labor with NIST?
A: Our CRADA with NIST also includes Nexstar, one of our members. Nexstar operates KWGN where we deployed BPS. NAB provided NIST with BPS receivers and technical support. NIST scientists then performed independent measurements and analysis of BPS using their own techniques and processes. It has been a great experience for us to engage with and learn from the team at NIST. The effort has taught us a great deal about PNT and the capabilities of BPS.
Q: Now that you have submitted your proposal to the FCC, what do you expect to be the timeline for approval, implementation and adoption?
A: The FCC follows a notice-and-comment process for adopting changes to its rules, which can take anywhere from several months to more than a year. The FCC previously convened the Future of Television Initiative to investigate issues associated with the transition, which should give us a bit of a head start. In NAB’s petition, we ask the FCC to establish a timeline that would have the top 55 television markets fully transitioned to ATSC 3.0 by 2028 and the remaining markets by 2030.
Q: How can the GNSS/PNT community help this project?
A: First, it can support the transition to ATSC 3.0 because BPS relies upon it. We need a full transition to recognize its potential. Next, it can continue to collaborate with us. We introduced BPS at the DOT Roundtable in 2022. Since then, we’ve collaborated with the PNT community on research, scientific papers, product design and deployments. We’ve built BPS together, and now we need to deploy it together.
The latest historic chapter in GNSS for space users was launched, as one would expect, at an Institute of Navigation (ION) GNSS+ conference — the one in Miami in 2019 — by a handful of technical and policy experts well positioned to “Go for the Gold” — GNSS on the moon! Thus, liquid refreshments in hand, the Lunar GNSS Receiver Experiment (LuGRE) concept was born, amongst excited discussion and scribbling on napkins by Oscar Pozzobon (Qascom), Joel Parker (NASA), Frank Bauer (NASA), Alberto Tuozzi (Agenzia Spaziale Italiana or ASI, Italian Space Agency), Lisa Valencia (NASA) and James “JJ” Miller (NASA).
Long before this productive, informal brainstorming session, global navigation satellite systems (GNSS), such as the U.S. GPS, were originally designed for use on or near Earth, providing positioning, navigation and timing (PNT) services up to an altitude of about 3,000 km (the GPS Terrestrial Service Volume). Over the decades, experimental missions pushed GNSS use higher, and by 2006, GPS specifications defined a Space Service Volume, extending GNSS services out to 36,000 km (geosynchronous orbit). NASA missions then deftly demonstrated GNSS utility well beyond Earth orbit — notably in 2019 with the Magnetospheric Multiscale Mission spacecraft formation, which successfully tracked GPS signals roughly 192,500 km from Earth, setting the world record for farthest and fastest reception of any GNSS signals in the space domain.
Building on this success, NASA proposed conducting the LuGRE in 2020 by using a combination of GPS and Europe’s Galileo signals at lunar distances. The flight opportunity for a lunar mission came through NASA’s new Commercial Lunar Payload Services (CLPS) initiative, and by early 2021, Firefly Aerospace was awarded the mission to carry LuGRE to the moon. The LuGRE team was very fortunate from the start, competing for and winning the last of 10 payload slots, and the only space operations flight demonstration amongst nine other science payloads focused more on assessing the lunar environment.
The progress of this initiative reflects a broader national and international push based on NASA’s role in implementing the 2021 U.S. Space Policy Directive-7, which directs NASA to work with the U.S. Space Force and other partners to extend GNSS capabilities farther into cislunar space to benefit both government and commercial users. Internationally, GNSS providers further cooperate through the UN-sponsored International Committee on GNSS to develop interoperable PNT standards for space users beyond Earth. So, ASI was a natural fit to become NASA’s international partner. The Italian GNSS company Qascom was awarded the receiver development, while the Polytechnic of Turin provided academic support. This historic groundwork has thus set the stage for the recent LuGRE mission to achieve several accomplishments in lunar navigation, breaking three world records in the process.
Mission overview: Blue Ghost Lander and CLPS
The LuGRE payload traveled to the moon aboard Blue Ghost Mission 1, a robotic lunar lander built by Firefly Aerospace under NASA’s CLPS program. CLPS, started in 2018, is a public-private partnership model through which NASA contracts commercial landers to deliver science and technology payloads to the lunar surface. Blue Ghost Mission 1 launched on Jan. 15, 2025, via a SpaceX Falcon 9 rocket and touched down on March 2, 2025. This made Firefly the first U.S. commercial company to successfully land on the moon upright, delivering 10 NASA-sponsored payloads, including LuGRE. The lander targeted a site near Mons Latreille in Mare Crisium, achieving a precision landing within ~100 m of the aim point. Built as a solar-powered lander about 2 m tall and 3.5 m wide, Blue Ghost was designed for a mission duration of one lunar day (~14 Earth days). By leveraging CLPS, NASA rapidly deployed LuGRE and other instruments, demonstrating the effectiveness of commercial partnerships in advancing lunar exploration. Blue Ghost’s successful landing and operations validated this approach and set the stage for upcoming CLPS missions in support of Artemis.
The LuGRE payload: Objectives and components
LuGRE is a technology demonstration aimed at determining whether Earth-originated GNSS signals can be reliably received and used for navigation at the moon’s distance. The payload was jointly developed by NASA and ASI with engineering by Qascom. Hardware on LuGRE includes a specialized weak-signal GNSS receiver, a high-gain L-band patch antenna array with RF filtering and a low-noise amplifier. This design allows it to track faint GPS and Galileo signals nearly 400,000 km from their transmitters. LuGRE specifically listens on multiple frequencies — GPS L1 and L5, and Galileo E1 and E5a — to maximize signal acquisition opportunities. The experiment’s objectives are threefold: (1) acquire and characterize GNSS signals in lunar orbit and on the surface, (2) demonstrate navigation fixes (position/time) using those signals at the moon, and (3) return data to inform the development of future lunar-specific GNSS receivers. All three of LuGRE’s objectives were met. During the mission, LuGRE began collecting and processing data en route to the moon (during a ~45-day transit) and also on the lunar surface after landing. As one of the first demonstrations of GNSS use on another world, LuGRE set out to prove that combined GPS/Galileo signals could enable autonomous navigation for spacecraft far beyond Earth.
A SpaceX Falcon 9 rocket carrying Firefly Aerospace’s Blue Ghost Mission 1 lander prepares for a launch to the moon on Jan. 14, 2025, from Launch Complex 39A at the agency’s Kennedy Space Center in Florida. (Photo: NASA / Kim Shiflett)
Benefits of GNSS for lunar PNT
If proven reliable, GNSS-based navigation at the moon offers significant benefits for future lunar missions. First, it provides a common PNT framework for lunar explorers, akin to GPS on Earth, enabling precise real-time positioning and time synchronization for astronauts and robotic systems. This could allow lunar crews and rovers to navigate autonomously across the surface without constant ground support, reducing astronaut workload and dependence on Earth-based tracking. Accurate GNSS-derived position data improves safety and efficiency — for example, helping rovers avoid hazards and chart optimal routes or aiding astronauts in pinpointing resources, such as water, ice or scientific targets. Using existing GNSS signals also means that missions might rely less on cumbersome radio tracking from Earth or lunar beacons, simplifying mission operations.
In the long run, GNSS technology can support the development of lunar infrastructure: future base camps, power stations and landing pads could all reference a shared navigation grid, much as terrestrial infrastructure does. Additionally, leveraging well-known GPS/Galileo signals could reduce costs and technical risks, supplementing a proposed new lunar navigation satellite network.
LuGRE’s results have affirmed these possibilities. During transit, LuGRE broke records by tracking signals at 395,900 km out in lunar orbit, proving multi-constellation GNSS can aid navigation to and around the moon. Shortly after landing, it further demonstrated an autonomous GNSS navigation fix on the lunar surface, 362,100 km from Earth. These achievements suggest that even existing Earth-centric satnav can be extended to serve lunar exploration, a promising development for upcoming Artemis endeavors.
Challenges of GNSS reception on the moon
Adapting GNSS to the lunar environment is challenging. The main difficulty is the weakness of signals by the time they reach the moon. GNSS satellites orbit around 20,000 km from Earth, beaming most of their signal power toward Earth’s surface. At nearly 10 times that distance, only the spillover (side-lobe) signals reach the moon, arriving attenuated and sparse. This necessitates high-sensitivity receivers and high-gain antennas (such as LuGRE’s) to even detect the signals, along with sophisticated algorithms to pull meaningful data from the noise. The geometry and coverage also pose issues: a receiver on the moon will often see a limited number of GNSS satellites above its horizon, potentially affecting the accuracy and availability of navigation fixes. Local lunar conditions add further complications. The moon’s lack of atmosphere means no ionospheric delay, which is a positive for signal clarity. However, it also means that there is nothing to refract or scatter signals over the horizon — thus, terrain plays a crucial role. Rugged topography (mountains, crater rims) can block line-of-sight to GNSS satellites, and deep craters or polar shadowed regions might have very poor reception.
The pervasive lunar dust (regolith) can also be problematic because it may coat antenna surfaces or contribute electromagnetic noise, especially during landings or surface activities. These factors require advanced processing techniques and possibly integrating GNSS with other sensors to achieve reliable navigation. LuGRE’s design and operations were tailored to confront these challenges. For instance, using dual constellations doubles the pool of satellites and signals available, and collecting data both in orbit and on the surface helps characterize how signal quality changes in different lunar conditions. The knowledge gained will guide the development of next-generation lunar GNSS receivers with improved robustness against weak signals and intermittent coverage.
Firefly aerospace’s Blue Ghost Mission 1 lander is carrying 10 NASA science and technology instruments to the moon as part of NASA’s CLPS initiative and Artemis campaign. (Photo: Firefly Aerospace)
Implications for Artemis and deep space navigation
LuGRE’s success is a proof of concept that navigation aids from Earth can directly support moon missions. This is of immediate relevance to NASA’s Artemis program, which aims to return humans to the moon and establish a sustained presence there. Artemis crewed vehicles (such as the Orion spacecraft) and the planned Gateway lunar station could potentially use GNSS signals during transit or in lunar orbit to autonomously determine their trajectories. On the surface, future Artemis astronauts and rovers could carry GNSS-enabled devices to know their precise location without relying solely on Earth-based tracking. This capability will become increasingly important as activities expand — from pinpoint landing of resupply craft, to coordinating lunar base operations to enabling the first long-distance treks by crew or robots on the moon.
By proving GPS/Galileo usability at the moon, LuGRE also paves the way for establishing a standardized lunar reference frame tied to existing GNSS, which all international partners can use for joint operations. In a broader sense, LuGRE is a stepping-stone toward more advanced navigation systems in deep space. It demonstrates techniques (such as combining multiple GNSS constellations and using high-sensitivity receivers) that could inform navigation around Mars or other distant targets. While Earth’s GNSS signals won’t reach Mars with useful strength, the lessons learned can drive the design of Mars-orbiting navigation satellites or better onboard autonomous nav systems for deep-space probes. In essence, the experiment is accelerating the development of a GPS-like interplanetary navigation capability, crucial for humanity’s expansion deeper into the solar system.
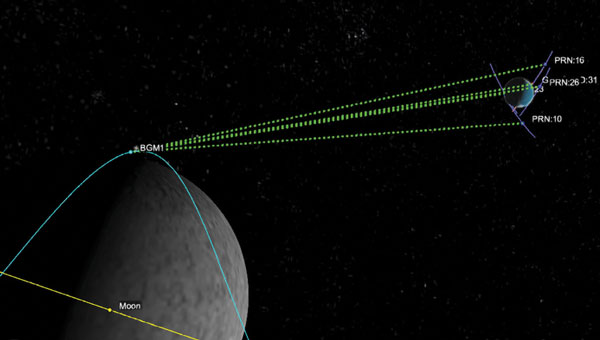
A Graphic representation of the relative geometry of Earth-moon-acquired GNSS satellites. (Photo: Agenzia Sapaziale Italiana)
Policy and international collaboration
The LuGRE mission exemplifies how international and commercial partnerships are shaping the future of space exploration. It was born out of a long-running collaboration between NASA’s Space Communications and Navigation program and ASI, reflecting a shared strategic interest in extending GNSS interoperability to the moon and beyond. The receiver hardware was developed by Qascom with academic support from Politecnico di Torino, underlining the role of industry and academia in innovation.
This NASA-ASI partnership built on earlier joint projects, such as GNSS receiver experiments on the ISS and suborbital flights, which tested using both GPS and Galileo for space navigation. Europe’s Galileo system, in particular, is a full partner in LuGRE. Its inclusion alongside GPS ensures that the experiment benefits from multi-constellation redundancy and also sends a message of GNSS interoperability, a key principle endorsed by the International Committee on GNSS. On the policy front, the mission aligns with U.S. space policy goals to develop services in cislunar space and encourages momentum in international standardization of lunar PNT frameworks.
Data from LuGRE will be made public, contributing to global research and possibly the drafting of new standards for lunar navigation that any nation’s spacecraft can adopt. The CLPS program itself, which enabled LuGRE’s delivery, represents a policy shift toward commercial sourcing of lunar services — fostering a market where companies such as Firefly, intuitive Machines, Astrobotic and others compete and cooperate to advance lunar science. As NASA leads the Artemis coalition with agencies from Europe, Asia and beyond, the LuGRE experiment offers a tangible product of cooperation: a foundation for shared navigation infrastructure at the moon. This collaborative, forward-looking approach will be critical as humanity returns to the moon not just to visit, but to stay.
Conclusion
LuGRE on Firefly’s Blue Ghost lander has marked a milestone in space exploration: it demonstrated for the first time that navigational signals conceived for Earth can be harnessed on the lunar surface. By uniting cutting-edge technical work (in receivers and antennas) with visionary policy support (via NASA’s CLPS and international GNSS cooperation), LuGRE showcases a path toward robust, autonomous navigation for the Artemis generation of missions. Achieving a GPS/Galileo fix on the moon is more than a symbolic first — it is a practical step toward a future where astronauts and robots navigate the moon — and one day Mars — with the same confidence as we do on Earth. The lessons from LuGRE will inform how we guide our spacecraft across the cislunar void, how we set up the positioning networks of tomorrow’s lunar bases and how nations cooperating can build the navigation backbone for a new era of deep-space exploration. In short, LuGRE has opened the door for GNSS to become an integral part of the lunar toolkit, blending technology and policy into a giant leap for navigation beyond Earth.