A 2019 RAND report for the U.S. Navy concluded that autonomy could still be in the distant future. The Navy should take care that a number of claimed autonomy applications could be more aspirational than practical, the report stated, with the applications nowhere near to operational capability. The authors wrote that huge investments may be required to achieve autonomous naval weapon systems, not only in autonomy.
Around the world in recent years, most armed forces and many advanced technology companies, along with government agencies, have been investing in AI and automation. Perhaps now, just six years later in 2025, we already are looking foward to unmanned vehicles that display not just fundamental autonomy, but also quite advanced “auto-capability.”
In the world’s water
The U.S. Navy (USN) has been operating a number of unmanned surface vessels (USV) over the past several years. In a 2023/2024 Pacific Fleet exercise, four USV models (Sea Hunter, Sea Hawk, Mariner and Ranger) were mostly operated autonomously. Ranger has a small bridge manned only for harbor maneuvers.
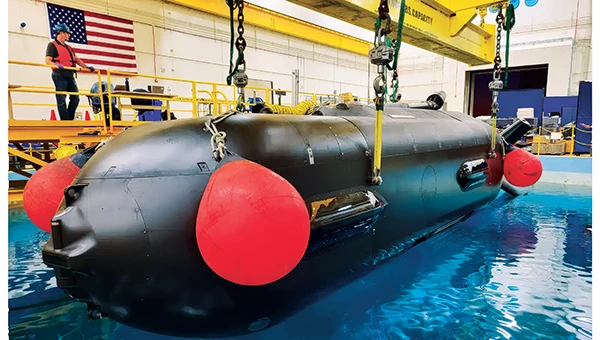
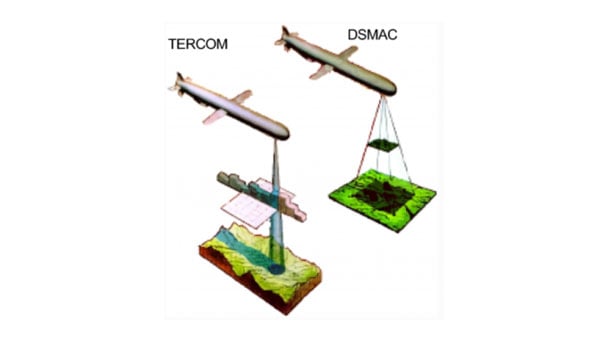
The USN has unmanned autonomy programs for large, small and underwater vehicles. The Orca submarine program is slated to consist of five 51-foot-long vehicles, and includes variants fitted with an added 30-foot payload section. To operate for several months underwater, it is likely that a similar degree of autonomy has been incorporated. ORCA surfaces regularly and can be given new routing if required.
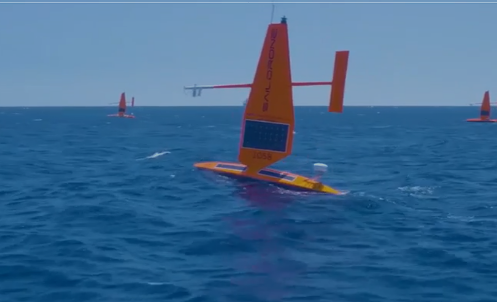
Other types of vessels collect ocean and seafloor data. The environmentally friendly Saildrone can operate independently — we could say autonomously — for more than a year. The Saildrone company, based in Alameda, California, contracts out its USVs, providing its technology to agencies and governments and taking on the risks of ocean surveying to acquire valuable data. Saidrones are equipped with satellite communications, GNSS navigation, weather sensors and sub-surface sensors.
Wheels on the road
Autonomy applications on land are dominated by commercial self-driving cars, Tesla being the leading manufacturer in the U.S. However, full autonomy is still a considerable way from being ready. At the full-autonomy level, known as Level 6 in the auto industry, the vehicle does all the driving, including obstacle avoidance, under all conditions, without any geographic limitation. Nevertheless, we appear to have progressed from basic manual control (Level 0) to somewhere around Level 3, where the vehicle is largely aware of its environment, and does most of the driving. Even so, human monitoring and control are still required.
Tesla’s autopilot technology in its Model S and Model X electric vehicles could be referred to as an advanced driver assistance system — or as Tesla calls it, “Full Self-Driving (Supervised)” — and is reported to handle emergency steering and braking, autonomous steering, lane changing, vehicle following, curve negotiation, and automatic parking. Autopilot sensor inputs are provided by 12 ultrasonic sensors and eight cameras providing a 360° field of view.
Tesla Autopilot intelligence can identify more than 250 traffic signs 50 countries, including turn signs and speed limits. It can identify and interpret traffic lights and road markings, and decide what to do when coming across things such as traffic cones and pedestrians.
Nevertheless, Tesla’s have been involved in quite a few accidents, the cause of which has been analyzed to be mostly a lack of driver attention (supervision), and in a number of cases, a failure of the autonomous system to recognize unusual road conditions.
Another company, Leo Drive, specializes in providing scalable software and hardware solutions, offering an end-to-end, one-stop service for integration of autonomous systems. Its mission is to make autonomous technology more accessible and widely adopted across various industries.
For its autonomous test vehicle, Leo Drive is using the Ellipse-D, a dual-antenna RTK inertial navigation system (INS) from SBG Systems. The company chose the Ellipse-D for its accuracy, reliability, and advanced features — all essential for autonomous vehicle development and testing. The Ellipse-D INS was integrated into Leo Drive’s, a passenger car converted for autonomous operations.

The U.S. Army has been using automation in its weapon systems for some time. How much autonomous behavior, of which these systems are truly capable, may be difficult to determine. The General Atomics Reaper unmanned aerial vehicle (UAV) is largely controlled over long-distance satellite links by operators in control stations. It’s possible that the same set up is true of most of the Army’s automated weapons — probably motivated by the need to avoid systems independently determining their own targets and firing without human confirmation.
It’s difficult to determine just what army programs are underway, other than to acknowledge that programs have been launched in the past. There doesn’t appear to be any open, clear indication of the degree of autonomy to be included. A couple of programs have produced at least visible hardware, but how much or little human control is involved is unclear.
Taking flight
Up in the air, new autonomy contender Mayman Aerospace is offering the Razor, a jet-powered vertical take-off and landing (VTOL) UAV. Development of Razor is funded by private investment and U.S. Department of Defense contracts.

Razor is imbued with a degree of AI that enables autonomous decision-making, as well as navigation. Its autonomous AI brain — the SkyField flight-control system — navigates independently in a GPS-denied environment, possibly involving ground beacons and eventually integrating with battlefield management systems. With a 5- to 6-foot-long airframe and sculpted shape, the aircraft presents a low radar cross section and has a degree of stealth to assist in the penetration of enemy defenses. Its top speed of 500 mph provides new options for both military and commercial applications, according to Mayman.
Razor also can aid disaster recovery, rescue operations, and the delivery of urgently needed life-saving cargo.
Many VTOL unmanned aircraft have struggled with the transition from vertical to horizontal flight. On its first vertical lift-off and climb-out on four jet engines, Razor paused briefly at altitude. Then its jet pods tilted slightly toward horizontal before the aircraft went directly into horizontal flight. An earlier flying testbed may have assisted the development of transition software, perhaps with a boost from machine learning.
Designed for deliveries, the EHang 216 heavy cargo, 16-rotor unmanned aircraft can carry a payload of 551 pounds over almost 22 miles with a top speed of 80 mph, according to the EHang company. The UAV is fully autonomously operated while being monitored over a 4G/5G data link at a manned control center. The system has an automatic fail-safe mode in which the UAV will return to base if the communications link goes down or if battery power drops too low.
EHang also uses a redundant design, with two GPS receivers and double rotors, ensuring a low likelihood of failure during a delivery run.
More In development
So while land vehicle autonomy is moving forward — with Tesla cars and Army vehicles that apparently can take control with close human monitoring — we still have some distance to go to achieve fully independent autonomous behavior on the road.

Autonomous applications on the sea are more common, with U.S. Navy applications showing substantial progress. Still, precise navigation in crowded harbors remains under human control. Humans are still watching and monitoring, ready to intervene should military or commercial UAV applications make untoward execution errors.
We will continue to follow developments of significant autonomy programs such as the U.S. Air Force Collaborative Combat Aircraft (CCA), a new type of uncrewed weapon system. The CCA and other programs are maintaining high investment levels, so it’s possible that we may see full autonomy fielded quite soon. Perhaps then our belief in its capability will become fully justified.