South Korea’s military has reported that North Korea disrupted GPS signals from border areas for the fifth consecutive day, impacting numerous civilian flights and maritime vessels. This interference originated from the western border cities of Kaesong and Haeju, North Korea.
According to NBC News, the GPS jamming affected the West Sea (Yellow Sea) area. While the exact number of affected flights and vessels was not specified, the disruption was significant enough to prompt warnings from South Korea’s Joint Chiefs of Staff (JCS) to aircraft and ships operating near the western border.
“We urge North Korea to stop GPS interference provocations immediately and strongly warn that it will be held fully accountable for any resulting consequences,” South Korea’s joint chiefs said in a statement.
The incident occurs amidst escalating tensions between North and South Korea. It follows recent provocations by North Korea, including test-firing of advanced solid-fuel ICBMs, launching balloons carrying waste and propaganda into South Korea and allegations of North Korean troops being deployed to support Russia in Ukraine.
Aviation specialists have expressed concerns about the risks posed by these jamming activities, including potential dangers to commercial airlines flying in poor visibility, complications in airline operations, and violation of international conventions on navigational safety.
The GPS jamming is seen as part of North Korea’s electronic and psychological warfare tactics, highlighting the vulnerability of South Korea’s critical infrastructure, notably the Incheon International Airport.
Experts warn that jamming attacks can lead to serious incidents, including potential aircraft accidents in worst-case scenarios. The ongoing situation underscores the complex security challenges in the Korean peninsula and the broader implications for regional navigation stability.
Xona Space Systems has partnered with QASCOM to integrate Xona PULSAR into QASCOM’s GNSS software-defined radio (SDR), the QN400-P. The integration is designed to strengthen positioning, navigation and timing (PNT) resiliency in the face of persistent threats.
The partnership seeks to deliver security, jamming and spoofing resistance and next-gen accuracy for industries such as UAV navigation and defense.
The QN400-P receiver offers multi-frequency, multi-constellation GNSS capabilities, including GPS and Galileo. Additionally, it includes measures for the mitigation of jamming and spoofing and is compatible with low-Earth orbit (LEO) PNT services, such as Xona’s PULSAR.
The demand for more robust, secure and accurate navigation is increasing across various industries, including agriculture, construction and autonomous systems. The integration of Xona and QASCOM technologies aims to deliver solutions for these sectors, as well as for other relevant applications and use cases.
Aerodata AG has been granted a Supplemental Type Certificate (STC) by the European Union Aviation Safety Agency (EASA) for its advanced GPS anti-jamming and anti-spoofing solution. The certification applies to installations integrated with Garmin 5000 avionics in a Cessna Citation Latitude jet.
With the growing threat of GPS jamming and spoofing in both civil and military aviation, Aerodata has developed a robust solution to offer continuous GPS availability. As attacks on GPS systems continue to increase, this anti-jamming and anti-spoofing technology is crucial in maintaining safe and reliable aviation operations.
Aerodata’s solution seeks to enhance its special mission capabilities, especially in Intelligence, Surveillance and Reconnaissance (ISR) missions and flight inspection, where continuous, highly accurate navigation is crucial.
Aerodata’s GPS Anti-Jamming and Spoofing Solution also positions Aerodata to reduce the vulnerability of its unmanned solutions to GPS interference, ensuring operational integrity across a wide range of manned and unmanned platforms. The newly certified system has undergone comprehensive testing and validation, and Aerodata is working on extending its capabilities to other aircraft platforms, targeting both civil and military applications.
The GPS World team participated in ION GNSS+ 2024, held at the Hilton Baltimore Inner Harbor, Baltimore, from Sept. 16-20.
The event showcased more than 400 technical presentations spanning six sectors, addressing commercial and policy dimensions and research advancements. GPS World had the opportunity to engage in a series of discussions and panels, including a plenary session full of stories of space, and of circumnavigating the globe in a sailboat using only paper charts, a compass, and a sextant to navigate.
(Photo courtesy of ION)
Bob Addiss, senior software engineer at CAST Navigation, demonstrated CAST’s latest GNSS simulation systems. CAST GNSS systems can be configured to simultaneously provide multiple constellation types on each antenna element, such as GPS (including Y-Code, SAASM, M-Code AES and MNSA), BeiDou and GLONASS.
(Photo courtesy of ION)
Joshua Morales, StarNav CEO, led a demonstration of cold start positioning and timing using a StarNav receiver and simulated Xona PULSAR signals. The receiver tracked up to 13 PULSAR satellites simultaneously, producing real-time signal tracking and PNT data with a Safran GSG-8 simulator. This demonstration showcased StarNav’s receiver capabilities for LEO satellite-based PNT.
(Photo courtesy of ION)
More than 1,000 in-person attendees explored the show floor, visiting 44 exhibits. They had the opportunity to network, engage with exhibitors and dive deeper into the latest products and trends in the industry.
The Pentagon’s first batch of new and more capable GPS satellites, part of the GPS IIIF program, is facing significant delays. The first batch is eight to eleven months behind schedule, which the U.S. Space Force attributed to manufacturing difficulties encountered by contractor Lockheed Martin, particularly with complex components necessary for the satellites’ operation. Originally expected to be available for launch in April 2026, the first satellite’s delivery has now been pushed to November 2026.
The GPS IIIF program is a $9.2 billion initiative aimed at deploying up to 22 advanced satellites. The first ten satellites in this series are designed to enhance the GPS system with improved accuracy and jamming-resistant signals. These satellites will serve both critical defense applications, such as guiding smart bombs, and civilian uses, such as turn-by-turn navigation.
The new F-model satellites promise increased navigation accuracy, a signal compatible with similar European satellites, greater resistance to cyberattacks and jamming and civilian search-and-rescue capabilities to detect and locate emergency beacons.
“For the average driver using GPS navigation,” the new satellites will provide “enhanced route planning and navigation, reducing travel time and improving fuel efficiency” and a “consistent GPS service even in urban canyons and areas with tall buildings,” according to the Space Systems Command.
According to the US Space Force, The primary obstacle appears to be the production of the Mission Data Unit, a crucial new component for improved navigation. Bloomberg reported that the subcontractor, L3Harris Technologies, manufactures this unit and is experiencing technical issues.
Despite these setbacks, Lockheed Martin is reportedly on track to meet the contracted delivery dates, even if they miss the Space Force’s preferred “available for launch” schedule.
Lockheed Martin’s fixed-price contract includes incentives for meeting schedules and keeping costs below U.S. targets. However, the Space Systems Command has indicated that some criteria have not been met, resulting in reduced profit for Lockheed Martin. The exact amount of lost payments has not been disclosed.
The Space System Command notes that these delays occur against global inflation and supply chain challenges. While these factors have affected industries worldwide, the Space System Command emphasizes that Lockheed Martin, as the prime contractor, is responsible for managing all aspects of the GPS IIIF satellite development and production.
The GPS IIIF program remains a critical component of the U.S. Space Force’s efforts to modernize the GPS constellation, ensuring its continued reliability and effectiveness for both military and civilian applications in the face of evolving global challenges.
In the early 19th century, as the sun moved across Britain from east to west, people set their clocks to local mean time, so that noon in Greenwich would occur about 16½ minutes before noon in Plymouth. Back then, travel on foot, by horse, or by coach was slow and inconvenient, so having to adjust their pocket watch, for the few who even had one, was the least of travelers’ concerns.
However, with the advent of railway travel, keeping track of time differences became confusing and impractical. In 1845, Henry Booth, a railway businessman involved with the Liverpool and Manchester Railway, petitioned parliament for a “Uniformity of Time,” arguing that when “the great bell of St. Paul’s strikes ONE, simultaneously, every City clock and Village chime, from John of Groat’s to the Land’s End, strikes ONE, also.”
In addition to rail travel, advances in industrialization and automation also increasingly required time standardization, synchronization, and optimization. With the advent of satellite navigation, the requirement for accurate time reached the order of nanoseconds, because a signal delay of one nanosecond corresponds to roughly one foot of distance on the ground. This is why atomic clocks were one of the enabling technologies for GPS.
In turn, atomic clocks on GNSS satellites became the most convenient way to calibrate and synchronize local clocks on the ground and to meet the stringent timing requirements of financial institutions, communication and broadcast networks, power utilities, transportation networks, weather radars, and a variety of scientific, commercial, military and consumer systems. Even though computer networks use PTP and other synchronization protocols, they all ultimately tie back to GNSS timing receivers to synchronize them to a global clock. This has made GNSS timing receivers ubiquitous and indispensable. Yet, the T in PNT (positioning, navigation, and timing) is invisible to most people and often an afterthought even for many of us in the industry.
I discussed some of the challenges of GNSS timing with representatives of five companies:
Paul Skoog and Eric Colard, senior technical engineers of product marketing, Microchip, frequency and time systems business unit
Jeff Gao, GM of communications, enterprise and data centers, SiTime
Farrokh Farrokhi, founder and president, etherWhere
Beacham Still, director of business development and operations lead, SyncWorks
For the full transcripts of my interviews for this article, visit here.
Positioning vs. timing
The first step in using GNSS signals for time synchronization is to process them to extract pseudoranges in the same way as for positioning — except that the signal from a single satellite is usually sufficient, because the position of the phase center of the receiver’s antenna is determined once and for all when it is installed.
However, most timing applications require much more accurate timing than positioning applications. “In GPS, let’s say that position accuracy is one meter with a clear view of the sky,” said Farrokhi. “That translates to a few nanoseconds of error. To achieve that over, say, a 24-hour cycle requires much tighter jitter on the receiver. So, the challenge for a timing application is to do a much better job of removing sources of errors compared to positioning. In the past, a requirement of 20 ns jitter in timing may have been enough for many applications. However, as the communication systems’ bandwidth and throughput increase, the requirement for timing becomes more stringent. We must come up with new algorithms and new architectures to reduce jitter and improve accuracy.”
Another difference is that most timing receivers — such as those in a cellular base station — are stationary and connected to an antenna with a clear view of the sky. “There are methods to extract and remove most uncertainties and inaccuracies,” said Farrokhi.
“Since it’s not moving, many satellites feed into the equations that help you solve the math to get you very accurate timing,” said Skoog.
”Finally, most GNSS positioning applications don’t require holdover, while for GNSS timing “holdover is a universal requirement,” said Gao, “ranging from four hours, for an edge data center or a small facility, all the way to 24 hours for a large cluster of servers or, in some extreme cases, even 48 to 72 hours for deployment in or near a hostile environment, where you expect jamming and all those bad things to happen.”
Accuracy requirements
etherWhere’s ew 6181 multi-GNSS timing receiver has a very low jitter across a wide range of temperatures.
The main critical applications for GNSS timing can be roughly grouped by the accuracy they require — but they are changing. “For example, for cellular systems up to 30 ns jitter used to be enough,” said Farrokhi.
“As we move to 5G and 6G, this spec becomes tighter and tighter. We now must be below 5 ns for 6G. As we increase the bandwidth and must support higher throughput, we are more sensitive to timing inaccuracies.”
“5G probably has the clearest requirement because you need 130 ns of relative time accuracy from one tower to another, mostly for handoff,” said Gao. “The accuracy requirements increase as you start to provide different services. For example, if different carriers want to aggregate some services, you start moving from 130 ns down to 65 ns, maybe even down to something more accurate.
“Today, what’s driving the growth of our business is all in data centers and artificial intelligence (AI),” said Gao. “That ranges from traditional front-end server infrastructure and back-end AI workloads to edge data centers.” Timing requirements for data centers differ from those for other applications in terms of accuracy, reliability, and distribution to different locations, not all of which can have an antenna on the roof. “It’s a very interesting, multi-dimensional problem.”
The requirements for financial services are defined in the United States by the Securities and Exchange Commission (SEC) and in Europe by the European Securities and Markets Authority (ESMA). To be legal, timing must have an audit trail all the way back to UTC and not diverge from it by more than 100 μs at the transaction level — the servers and the routers, said Gao.
Additionally, in the United States, the Financial Industry Regulatory Authority (FINRA) requires financial institutions to be 50 ms to the National Institute of Standards and Technology (NIST). “That’s a hole so big you can drive a bus through it,” said Skoog. “However, if you want to trade on a stock exchange in Europe, you’re down to 100 µs. People typically will get a time server that will get them down to where they’re doing all their time stamping at better than a microsecond, but they put in a rubidium oscillator, so that if GPS goes away they can still finish that trading day and be better than 100 µs to UTC.”
“For the bigger data centers there are no industry-wide standards,” said Gao. “Cloud service providers can each define their own requirements. What they care about is the window of time uncertainty: whether at the server level I have an error of 1 ms or 5 ms. You can go to 1 μs of error or down to 10 ns of error, each of which will enable you to provide a set of services. At 100 μs, for example, 99% of all your services are running. At 5 ms, you may have to start shutting down some services. More accurate time on the server also enables you to minimize the network traffic. So, conceptually, you can look at data center requirements anywhere from 5 ms all the way down to hundreds of nanoseconds, or even more accurate.”
“Many markets have a lot in common, because they have communication networks,” said Colard. “For example, train and subway networks have communication networks very similar to those of telecoms. In the power industry, you have a communication network and a substation network. In the defense sector, you have confidential communication networks that are very similar to those from AT&T or Verizon. So, all these markets have the same requirements and the same features and challenges.”
“Probably the number one reason why people put in a Stratum 1 NTP time server is to make sure that their log file time stamps are accurate,” said Skoog, “because that makes their network management systems more accurate and reliable.” However, accuracy is not the only concern. “The clocks are pretty accurate, but they connect to the network. All the network guys — the people who manage these networks — cannot plug this clock in until the security people give their stamp of approval.”
Microchip Technology’s Precise Time Scale System (PTSS) is traceable to Universal Coordinated Time (UTC) and does not depend on GNSS.
Clocks and oscillators
For all these accuracies, the key mechanism is GNSS timing. “In a typical data center,” said Gao, “you’re going to start with two grandmaster clocks, which are boxes that combine GNSS timing with locally accurate timing. That’s probably going to provide 5 ns to 10 ns of accuracy. More importantly, in addition to that, they have extremely good local oscillators that could be OCXOs, even some atomic clocks, that enable them to hold over if they lose GNSS timing for four, five hours, or 10 hours — up to 24 hours or 48 hours for a huge facility with many AI clusters.”
Likewise, many financial services units don’t have GNSS antennas for every server, router and network card. “It just gets tremendously expensive to distribute the signal to each server,” said Gao, “because most of them are housed in huge warehouses that don’t have access to an antenna. They typically have a grandmaster clock.”
“The GPS receiver itself is one product for all the segments that we sell into, but configured depending on how many timing outputs the customer wants and which frequency outputs,” said Tommey. “We also put a holdover oscillator into the unit that — if, for whatever reason, the GPS signal is lost — continues to provide valid time outputs for days, weeks, or even months.”
“The advantage of GNSS is that over a long period of time it is extremely accurate,” said Gao. “The accuracy of an oscillator depends on how much holdover time you require. GNSS has a natural resolution of roughly 20 ns. At 5 ns, you start to rely on your local oscillator to do the next level filtering. For a base station or a core router, you need to get to 5 ns or better. So, you have GNSS native, you have an oscillator to do filtering to get a better accuracy and holdover, then you have network-based timing in a time scale of some sort.”
“A data center, core network, or edge network never relies on a single source for timing,” said Gao. “GNSS is always viewed as extremely stable timing that everybody needs when you have access to the receiver and the antenna. Then you rely on the local oscillators and 1588 network timing as complementary technologies to ensure that you will always have timing all the time at a given accuracy.”
Networks
Increasingly, timing is distributed over a network. Some markets are more focused on Network Time Protocol (NTP), which has an accuracy of a few milliseconds, while others, such as telecoms, are more focused on Precision Time Protocol (PTP), which follows IEEE standard 1588 and is traceable all the way to a grand master somewhere. If someone just needs NTP, “it’s pretty easy to get 1 µs to 10 µs time accuracy between an NTP server and an NTP client,” said Skoog. “They may not even need 1 µs to 10 µs, but they’re going to take it if they get it, because log file correlation is very useful. Then when you get to PTP, it brings in a lot of hardware, time stamping and on-path assistance to get rid of some of that asymmetric delay. Now you’re down to sub-microseconds, and even approaching low nanoseconds. Then, if you must be down to 1 ns or something smaller, you’re into a 1 PPS application.”
PFT3207A GNSS receivers in 1+1 configuration with a ptf1207A redundancy switch to provide timing and frequency reference signals to sub-systems in a satellite Earth station installation.
Jamming and spoofing
Any infrastructure that must always be in service requires redundancy and resiliency. “We build rubidiums, cesiums, hydrogen masers and so forth,” said Skoog. “For years, the cesium was the domain of the metrologist. Those days have passed. Sure, metrologists buy them. But you need a plan B for what you’re going to do if GPS goes away, so you can connect pretty much all our products to a cesium clock.”
When it comes to the impact of jamming and spoofing on timing, perspectives vary substantially between companies. “We’ve only ever had one customer who thought they’d been jammed or spoofed,” said Tommey. “We honestly don’t see very much of that at all.” However, according to Still, in the United States, a common problem is the proliferation of personal GPS jammers. “You see this through people with corporate vehicles and a fear of being tracked — similar to the rise of VPNs. Our power distribution systems, our substations, our telco central offices are in the communities they serve.” The problem arises, for example, “at substations located next to truck stops, night clubs, bars, all the different places that folks might not want to have pop up on their corporately tracked vehicles.”
Often, when network operators see anomalies on their GNSS-based timing systems, it is challenging for them to identify and effectively mitigate the source of that interference. “You can naturally go to the site and try to do audits, and there are tools to try to measure and monitor this,” said Still. “What is more common and practical for network operators is designing and deploying their GNSS networks with the expectation that they’re going to encounter some form of interference.”
Current wars have spurred great interest in distribution of timing over optical networks, said Colard. “Close to Russia, China, Israel, any of the conflicts in the world, there have been attacks on these networks every day. Spoofing is the main concern that I’ve seen. Anti-spoofing or anti-jamming are not enough. You need to find alternate time references for when GPS fails for any reason, so it’s an architecture discussion. For example, assisted partial timing support (APTS) has been used for years. It connects to other PTP grandmasters in the network and provides PTP input while GPS is down. Another alternative is to rely less and less on GNSS in general.
“The alternative to using GPS receivers everywhere is to limit them to very specific strategic points and distribute time over optical networks,” said Colard. “There are segments of hundreds of kilometers in many countries without any GPS receivers. There are also enhanced primary reference time clocks (ePRTCs), which are usually connected to GPS and cesium clocks for resiliency. Often, carriers now are not even using GPS there. They’re using metrology labs and the national time coming from NIST or similar national time agencies as the time reference, instead of GPS, to limit the use of GPS as much as possible across the network.”
A traditional GNSS-based clock for time-division multiplexing (TDM) services in a telecom’s central office.
Multipath
As with the impact of jamming and spoofing, perspectives vary regarding the impact of multipath on timing. “We haven’t seen issues with multipath, except where users don’t do a good job of positioning their antenna or antennas,” said Tommey. Conversely, Gao said that “multipath is extremely relevant to timing. Let’s say, to give an extreme example, that you’re locking onto a single satellite. Depending on whether you have an unimpeded line of sight and no multipath or the signals are bouncing off a building, the difference could be 100 ns to 500 ns.”
“Multipath might be a problem in a GPS antenna for timing, which usually sits on the roof,” said Skoog. “If you can keep this signal from reflecting up to the antenna in the first place with an adequate ground plane, that’s probably the singularly most effective thing you can do. I’ve been in GPS a long time. It used to be a very big deal. I never get asked about it anymore. It’s an old problem that’s sort of been solved.”
Many people who have static antennas do not understand “that their sky view changes over the course of the year, and their visibility throughout the seasons and the winter solstice will be different than in the summer,” said Still.
Transition
The telecom industry is transitioning how it times and synchronizes networks from the time-division multiplexing (TDM) method that it has used for decades to IP and packet-based networks. “Particularly in TDM networks, the idea of UTC-traceable time of day was not really a focus until the advent of NTP, but ultimately it was all frequency synchronization,” said Still. “The idea was that if your network was in a frequency lock, and the phased alignment was good, your network would all drift together. So, TDM networks were also inherently synchronous, in a Synchronous Optical Networking (SONET) environment. You can distribute that frequency again throughout your network and pull it down from the overhead. By comparison, packet networks are inherently asynchronous, so it breaks the frequency chains that we’ve long relied on to distribute and synchronize our networks, and ultimately requires a new approach.
“Modern networks and applications are increasingly reliant on precision time from GNSS-derived sources — high speed, low latency, high throughput, all being deployed to meet current and future needs,” said Still. This requires new sources of time, such as UTC-traceable time of day. Global networks and edge applications will all rely on time of day. “Not only are you trying to keep all your own networks synchronized, you must also have a relative accuracy to the rest of the world. So, some significant changes are taking place, particularly for engineers who have spent their whole career on TDM or SONET networks.”
Now, Still said, “we can be more accurate using PTP on the edge than we can be with GPS. On the edge GPS now is an option. We keep those in place, distributed throughout the network, in case of bi-directional fiber cuts or losing some of the transport that we use to distribute precision timing, but you can be more accurate, more secure and more stable by using PTP than we can by relying on GPS.”
Conclusions
GNSS timing receivers are central to timing vast swaths of our industrial societies. Yet, as with positioning and navigation, growing concerns about jamming and spoofing are motivating some sectors to reduce their reliance on GNSS for timing and to develop alternative time references, including low-Earth orbit (LEO) satellites and eLoran. Meanwhile, many networks are transitioning to a new way of distributing timing.
Inertial Labs has introduced the RESEPI Ultra LITE, a lightweight payload combining lidar and camera technology for advanced surveying and mapping applications. The system integrates the XT-32 lidar scanner to offer users advanced data accuracy and point density across various operational modes.
The RESEPI Ultra LITE has a compact design with a 5MP colorization camera, making it ideal for small unmanned aerial systems (SUAS) with strict volume constraints. It can be used for aerial and ground-based applications, including utility mapping, construction volumetrics, precision agriculture, forestry, site surveying and mining.
Designed for seamless integration, the system is compatible with a wide range of platforms such as Freefly, WISPR, DJI, Sony and mobile setups. Inertial Labs’ proprietary SnapFit adapters ensure quick and secure mounting to enhance the system’s adaptability.
A link to the live event will be sent to you two hours before the event. Your personalized event URL will be automatically generated by the ON24 system. To ensure receipt of the email, please whitelist this email address by adding it to your contacts: [email protected].
This presentation will begin at 1 p.m. EST on Thursday, December 5. A recording will also be sent to you the following day so you can watch it on-demand.
Audience members may arrive 15 minutes prior to live time. If you have any questions, please contact event producer Jesse Khalil at [email protected].
Astranis has been selected as one of four prime contractors for the U.S. Space Force (USSF) Space Systems Command’s (SSC) new Resilient GPS (R-GPS) program. This initiative aims to augment the existing GPS constellation with small, low-cost satellites to enhance resilience for both military and civil users. The program’s initial phase, Lite Evolving Augmented Proliferation (LEAP), aims to launch up to eight satellites by 2028.
As part of this effort, Astranis has been awarded an $8 million contract for concept development. The company plans to leverage its expertise in manufacturing and operating low-cost, high-orbit satellites. Specifically, Astranis will utilize its MicroGEO satellite design and Octane Software-Defined Radio hardware to advance the R-GPS spacecraft design.
The R-GPS program is characterized by a rapid development timeline. It utilizes the “Quick Start” authority, which allows for contract awards in under six months. Ultimately, the USSF envisions a proliferated fleet of over 20 small GPS satellites to enhance navigation and timing capabilities.
These satellites will incorporate the latest GPS signals, including M-code, to offer optimal performance even in contested environments. In addition to Astranis, other contractors involved in the initial phase include Axient, L3Harris and Sierra Space.
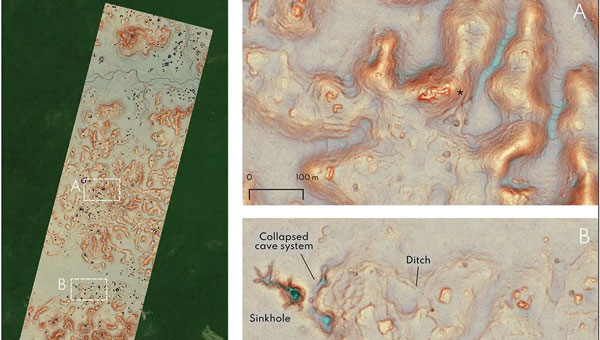
A graduate student analyzing publicly available drone data in Mexico unexpectedly unveiled a vast ancient Mayan city hidden beneath a dense jungle in Campeche on the Gulf of Mexico. The findings, published in the academic journal Antiquity, reveal an extensive urban complex covering an area approximately one-and-a-half times the size of Washington, D.C.
Luke Auld-Thomas, a Ph.D. candidate at Tulane University, stumbled upon this while browsing the internet, according to NBC News. The data, originally collected by a research group studying land-use patterns, was captured using UAV mapping technology and lidar. Auld-Thomas applied archaeological analysis methods to the survey data, leading to the identification of the ancient city.
Unraveling the mystery
The research team named the newly discovered city “Valeriana” after a nearby freshwater lagoon. This urban center consists of 6,674 structures, including pyramids reminiscent of those found at Chichén Itzá in Yucatan and Tikal in Guatemala. Valeriana likely housed between 30,000 and 50,000 inhabitants at its peak.
Researchers believe Valeriana flourished during the Classic Maya period (AD 250 to 900) and likely collapsed between 800 A.D. and 1,000 A.D. The city’s decline is attributed to a complex set of factors, with climate change playing a significant role. Marcello Canuto, an anthropology professor at Tulane University, explained that climate variability caused stresses and adaptations, leading to systemic unrest in densely populated areas.
Valeriana’s discovery highlights how surveys and lidar can be used in archaeological research. This newly adopted method uses laser pulses to penetrate forest canopies and capture detailed images of hidden landscapes. Canuto describes it as a form of “digital deforestation,” allowing researchers to uncover extensive, previously unseen layers of history in remote and inaccessible regions.
The HSRP is a federal advisory committee that provides NOAA with independent advice on improving the quality, efficiency, and usefulness of NOAA’s navigation-related products, data, and services. The HSRP advises the NOAA Administrator about its navigation (i.e. nautical charts and ENCs), physical oceanographic (i.e. tides & water levels), geospatial, positioning, and coastal and shoreline programs, products, and services. There are two public meetings each year in different port regions at which public comments from stakeholders and partners are sought. Most of the meetings include webinar capability for those not in the area.
See an excerpt below of the agenda for the three-day meeting. These meetings are open to the public and I would encourage anyone interested in the activities of these program offices to participate in the meetings. Participants can attend in person or virtually via webinar. I participated in the meeting in virtual mode. The HSRP website provides links to reference documents, presentations, and recordings.
This newsletter will highlight the session on the NGS Geospatial Modeling grants.
Excerpt from the HSRP 2024 Fall Meeting Agenda
September 24, 2024
Presentations:
Opening and welcome
Mr. Sean M. Duffy, Sr
Mr. Mark Schrupp
Sen. Peters (MI), video
Rep. Theander (MI), video
Ms. Rachael Dempsey
RDML Benjamin Evans
Opportunities and Challenges for the NOS’s Navigation Observations and Positioning Portfolio
Moderator: Ms. Rachael Dempsey
Dr. Larry Mayer
Dr. Marian Westley
RDML Benjamin Evans
Dr. Shachak Pe’eri
Directors FSK update
Local, Regional, State Stakeholder and Partner Perspectives on NOAA Navigation Services
Moderator: Mr. Eric Peace
Capt. Richard Armstrong
Mr. Paul LaMarre
Capt. Tony Brandano
Capt. Peter Barry
Mr. Derek Cusimano
Underserved Communities Mapping and Charting needs in the Great Lakes Region
Moderator: Mr. Nathan Wardwell
Dr. Jennifer Boehme
Ms. Stephanie Gandulla
Mr. Ed Bailey
September 25, 2024
Vdatum
Dr. Shachak Pe’eri
International Great Lakes Datum (IGLD)
Dr. Jacob Heck
Ms. Sierra Davis
HSRP Working group:
HSRP Technical Working Group Report
September 26, 2024
NGS Geospatial Modeling Grants
Moderator: Mr. Galen Scott
Dr. Jeff Freymueller (Ph.D.)
Ms. Mara Figueroa Berrocá
Great Lakes Perspectives on National Drivers
Moderators: Mr. Nathan Wardwell and Mr. Eric Peace
Ms. Erika Jensen
Mr. John Bratton
Mr. Mark Breederland
Mr. Ryan Chatland
NOAA Center of Excellence for Operational Ocean and Great Lakes Mapping
The session on NGS geospatial modeling grants provided updates by representatives from MSU (Jeff Freymueller) and OSU (Mara Figueroa Berroca). I have provided a few highlights below, but I encourage everyone to download the presentations and/or listen to the daily recording.
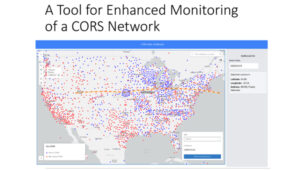
Freymueller highlighted that keeping the error in coordinates small in a spatial reference system is hard to do in a deforming Earth. This is very important to all users of the National Spatial Reference System (NSRS). Not all CORS are created equal, and their coordinates can change based on various factors such as earthquakes, equipment changes, and local deformation due to the extraction of groundwater. Therefore, efficiently and effectively monitoring the CORS is necessary to quickly identify issues and correct coordinate values in a timely manner. MSU developed a CORS Dashboard that provides a tool for monitoring CORSs. Freymueller provided a slide depicting an example of a CORS in California. See the image below.
MSU CORS dashboard. (Photo: HSRP Website)
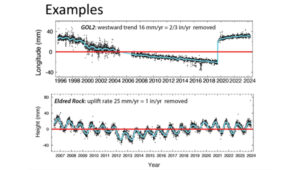
Plots of GLO2. (Photo: HSRP Website)
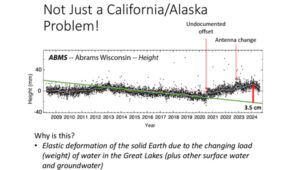
That said, Freymueller stated that crustal deformation and changes in CORS coordinates is not just a California issue. He provided a slide of a plot of a station in Wisconsin (see the image below.) The plot highlights changes in values where there’s an undocumented offset, a change in antenna, and an elastic deformation due to a change in water load in the Great Lakes.
Plot of ABMS. (Photo: HSRP Website)
As previously mentioned, keeping the error in coordinates small in a spatial reference system is hard to do in a deforming Earth, especially when so many factors affect coordinates, such as the changing load of water on the Great Lakes. The MSU CORS Dashboard will provide a tool for monitoring the CORS and identifying issues associated with coordinates of the CORSs.
The MSU CORS Dashboard plans include having different modules for various purposes:
Compare Solutions:
With other solutions
With Velocity Model
Compute and Display Metrics and select CORS stations based on metrics.
Earthquake and Postseismic Deformation Modeler:
Ingest fault model solutions and generate predictions
Statistics on agreement of different fault models
How well do the range of geophysical models agree?
Forward predict postseismic deformation
The MSU CORS Dashboard provides information about CORSs that could be useful to surveyors and mappers when performing and analyzing a GNSS survey project. For example, one module will compute and display metrics about individual CORSs, providing surveyors with the appropriate information to select the best CORSs for their GNSS project. NGS and MSU will determine how this CORS Dashboard is incorporated into NGS products and services.
Another phase of the MSU geospatial modeling grant included developing a geodesy program to help address the U.S. geodesy crisis. The presentation provided several slides with information on students obtaining a master’s degree in geodesy. The coursework for the two-year online program is divided into four thematic areas: Foundations of Geodesy, Fundamentals of Geodesy and Geophysics, Mathematical and Computational Concepts, and Geodetic Methods and Applications. Students will take a mix of courses (no thesis) from the consortium institutes – MSU, Michigan Technological University (MTU and the University of Alaska Fairbanks (UAF).
The following is a Timeline for Development:
2024: Develop University consortium agreements and establish structure for master’s program
2024/2025: Develop courses
Fall 2025: Launch program with first class of students
Freymueller mentioned that the timeline for launch currently feels optimistic due to bureaucratic hurdles dealing with the consortium agreements, but they are continuing work on the development of courses. Further newsletters will provide updates on the progress of the program.
Outline of Geodesy Master’ Degree
Foundations of Geodesy
Courses:
Map Projections (MSU)
Geodetic Models (MTU)
Both courses required
Courses provide backgrounds in mapping, projections, datums, reference frames, and transformations.
Fundamentals of Geodesy and Geophysics
Courses:
Modern Geodesy and Applications (MSU) or Geodetic Methods and Applications (UAF)
Geodetic Data Processing and Analysis (MSU)
Solid Earth Geophysics and Geodynamics (MSU) or Foundations of Geophysics (UAF)
Positioning with GNSS (MTU)
Students choose at least 2 courses
Courses provide background in geodetic theory (including orbit determination and GNSS and imaging satellite systems), measurement and interpretation of steady state and time variable motions within the solid Earth, cryosphere, and hydrosphere, data processing, and geophysical modeling.
Mathematical and Computational Concepts
Courses:
Introduction to Numerical Tools for Earth and Environmental Sciences (MSU)
Programming and Automation for Geoscientists (UAF)
Data Analysis and Adjustments (MTU)
Inverse Problems and Parameter Estimation (UAF)
Numerical Analysis (UAF)
Students choose at least 2 courses
Courses will provide foundation in programming and mathematical techniques (including inversion theory and linear regression) essential for geodesy
Geodetic Methods and Applications
Courses:
3D Surveying and Modeling with Laser Scanning Data (MTU)
Courses extend knowledge into additional land- and satellite geodetic techniques, network design, and geophysical applications
The second presentation on the geospatial modeling grants was titled “Developing a Fully Kinematic, Backwards-Compatible Reference Frame for the Continental United States of America and Canada,” presented by Mara A. Figeroa, OSU.
OSU Presentation. (Photo: HSRP Website)
Figeroa outlined the following project goals:
Development of the operational (sandbox) kinematic reference frame (KRF).
Develop automation processes to detect and model deformation resulting from earthquakes, GIA and other crustal motions.
Parallelization wrapper for M-PAGES (adapted from our existing Parallel.GAMIT)
Process all existing data in the U.S. and Canada
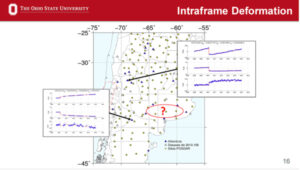
Creation of Intraframe deformation models (i.e. trajectory prediction models)
Use GNSS and InSAR aided by AI to access the conventional epoch of the frame.
Provide the users with maps of “stable areas” to facilitate access to the frame using differential processing.
Figeroa noted that the coordinates and model parameters defining the reference frame are time-dependent in a National-Level Kinematic Reference Frame (KFR). The KFR needs to provide multiple conventional epochs that are accessible to all users anytime and anywhere to guarantee topologic homogeneity. Models need to be updated to account for the changes in coordination due to earthquakes and other deformation events. Figeroa stated, “Kinematic implies constant update of the reference frame parameters to ‘honor’ the frame’s internal geometry.”
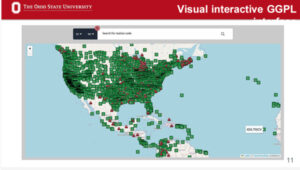
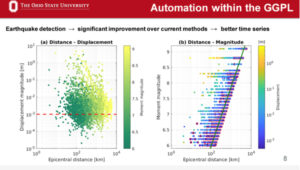
OSU has developed what they denote as a Geometric Geodesy Processing Line (GGPL) to evaluate and analyze CORSs data. They are processing all CORSs data to identify issues with the data that could be due to various factors such as crustal deformation and equipment changes. The tool highlights stations with a potential warning flag issue (see OSU Interactive GGPL).
OSU Interactive GGPL. (Photo: HSRP Website)
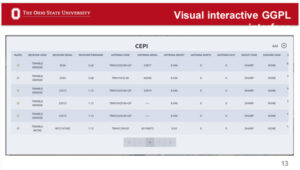
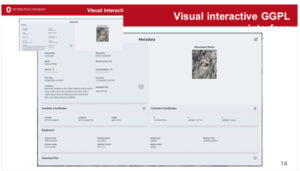
The system is automated, but they have developed interactive visual tools so researchers can review the results of each station. The visual interactive GGPL provides metadata about the station such as coordinates, maps, photos, and dates of installation of equipment.
OSU Interactive GGPL – Location and Photo. (Photo: HSRP Website)
OSU Interactive GGPL – Equipment. (Photo: HSRP Website)
OSU Interactive GGPL – Coordinates and Other Metadata. (Photo: HSRP Website)
One feature of the GGPL is that it generates plot changes in coordinates over time (see the image below). I recently participated in a School of Earth Science Advisory board meeting at OSU and visited with Demian Gomez, Ph.D., the project’s lead principal investigator.
Demian demonstrated the GGPL tool for me. I was really impressed at how fast the system was, as well as how much information it provided in a user-friendly format. In my June 2024 GPS World Survey Scene newsletter, I highlighted an issue I found with an antenna change at a CORS in Texas. I ask Demian to pull up the information for the same site. The GGPL highlighted the same antenna change and shift in coordinates that I found. This feature is important to developing an intraframe deformation model (IFDM). How NGS will use this in the development of the IFDM2022 for the new, modernized NSRS will be determined later by NGS.
An important aspect of an IFDM is to identify and model changes in coordinates due to crustal deformation. As mentioned by Freymueller, modeling earthquake and other deformation events is extremely important to maintaining an accurate spatial reference frame. OSU GGPL tool assists in identifying potential deformation due to earthquakes.
OSU Interactive GGPL – Detection of Earthquakes. (Photo: HSRP Website)
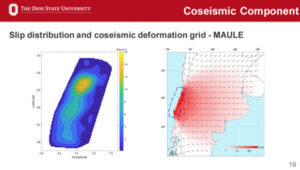
OSU’s process includes developing trajectory prediction models (TPM). Trajectory prediction models need to be continuous in space and time to predict the behavior of passive benchmarks. Accurate trajectory prediction models will ensure access to a geodetic reference frame after big earthquakes utilizing accurate post-seismic coordinates. OSU’s process includes developing techniques for observing GNSS networks in sparse areas to improve the model’s predictability. My May 2024 GPS World Survey Scene newsletter highlighted Demián’s extensive experience modeling time-dependent coordinates and several papers published in the Journal of Geodesy addressing this topic. The papers have demonstrated the model’s effectiveness in earthquakes in Argentina and have developed tools that provide coordinates in updated reference frames based on the models. This is important to users of the new, modernized NSRS because the accuracy of the IFDM2022 model is vital to providing accurate Reference Epoch Coordinates (RECs) in the new, modernized NSRS. See my August 2022 GPS World Survey Scene Newsletter for information on RECs and my May 2024 GPS Newsletter for more details on Demián’s work.
Model of Co-seismic Component. (Photo: HSRP Website)
This newsletter highlighted the progress that OSU and Michigan State University have made in developing tools that will be useful for developing and implementing the new, modernized NSRS in 2025.
As I previously mentioned, I would encourage everyone to download the presentations and recordings for more details. The recording of the session on NGS Geospatial Grants can be found on the Sept. 26, 2024, recording. (The session on NGS Geospatial Grants starts at 1:02:45 on the recording.)
Similarly to my previous newsletter, I want to remind everyone that in less than a year, NGS will finalize the new terrestrial reference frames and geopotential datum. Time really is running out and users need to obtain a working knowledge of the new, modernized National Spatial Reference System.