ANELLO Photonics and Key Dollar Cab, an OEM and technology integrator, have formed a strategic collaboration to bring ANELLO’s optical gyroscope technology to agriculture applications. The collaboration focuses on enhancing positioning accuracy in orchards and other high-value crop environments with limited GPS availability.
The partnership aims to address the growing demand for more robust and accurate positioning systems in orchards where precise navigation is crucial for optimizing operations and maximizing yield.
Optical gyroscope technology offers several advantages compared to traditional positioning systems, including improved accuracy, reliability and robustness in challenging agriculture environments. The optical gyroscope technology and positioning solutions integrated with Key Dollar Cab’s agricultural machinery and equipment is designed to offer farmers improved precision and efficiency in various orchard management tasks, including planting, spraying, fertilizing and harvesting.
My past GPS World newsletters (February 2024, March 2024, April 2024 and May 2024) highlighted the NGS Geospatial Modeling grantees which included creating a CORS Dashboard that will be very useful to NGS employees monitoring the CORSs and evaluating the Intra-Frame Deformation Model (IFDM).
I mentioned in the May 2024 newsletter that NGS announced the release of a beta version of a new NOAA CORS Network (NCN) Station Web Page. Each CORS station in the NCN will have its own page with data, metadata, maps and photos displayed in a modular layout so information is easily found in one location. This newsletter will describe some features of the new beta site.
I will highlight some of the information provided by the routine, but I would encourage others to access the beta site and provide feedback to NGS. NGS states on the site that “This is a Beta product. We are interested in your feedback. Please email us at: [email protected] and indicate the subject as “NCN Station Pages Feedback.”
When you access the website, it defaults to the CORS station GODE. The user has the option to enter their own CORS station in the box located on the right-hand side of the webpage.
Texas CORS Station TXLV.
A nice feature of the site is that the CORS data availability for the last seven days is provided under the Station Information section. For those interested in downloading data, there is a button titled “Quick Data Download,” on the top left corner. The site allows users to download daily data from the past 30, seven or two days.
In my example, I downloaded the last seven days of data for CORS TXLV. It only took a few seconds to download and provide the data in a zipped file. If a user includes this process in their standard operating procedure, they can easily download all the CORS data required for their project.
Downloading TXLV GNSS data.
Another planning tool available is the weather information for a week. Today, most users can get the weather information on their phone. However, this is a convenient option to have when you are looking at available CORS on the day of occupying marks. It can help in managing schedule changes.
There is an option to show the five nearest CORS relative to your selected CORS by clicking on the button titled “Show Closest 5 on Map.”
CORS Located near TXLV.
Clicking on the button labeled “Show Legend” provides information about the CORS depicted on the map. This is a useful feature especially if selecting CORS that provide GNSS data other than GPS and/or data at different sampling rates.
If a user clicks on the button “Open NGS Map,” the site will access the NGS Map website and provide information about the selected CORS. This allows users to get information about the CORS. I found that the beta site provided most of the same information using the various options on the NGS Map website.
NGS Map depicting CORS TXLV.
The site provides photos and equipment history that may help in troubleshooting an issue associated with processing sessions or during the analysis of the adjustment results. I have highlighted that a new antenna was installed at the TXLV CORS on August 5, 2021. I will explain later in this newsletter how this information helped me during my analysis of a GNSS project.
Photos and equipment history of TXLV.
Under the Coordinates and Velocities section, the site provides information about the latest coordinates and velocities along with superseded values for the selected CORS. The superseded values may not be of interest to most users, but I am always looking at the changes in CORS coordinates. It is my nature to try to understand the reason why something has changed; especially for CORS that I am including in a GNSS project.
Coordinates and velocities.
Clicking on the link titled “Position and Velocity” under the Coordinates and Velocities section provides the coordinate and velocity information for your selected CORS. I have highlighted the ITRF2014 velocities, the NAD 83 (2011) velocities, the latest antenna type, installation date and the dates the positions and velocities were revised.
As shown in the image above, the position and velocity sheet provide the dates that the position was revised. Clicking on the link titled “Datasheet with GRP/MON included (if available)” in the Coordinates and Velocities section provides the datasheet that lists the NAD 83 (2011) superseded survey control values. The superseded ellipsoid heights from the datasheet are provided in the box titled “Excerpt from TXLV Datasheet.”
When you are trying to estimate heights to the 2 cm level, changes in published NAD 83 (2011) CORS heights at the 2 cm level are significant and should be investigated and understood. This beta CORS website offers useful information that can help understand some of these changes. I will explain later in the newsletter how this information and other data from the beta site helped me in the analysis of my GNSS project.
Excerpt from TXLV data sheet.
The beta site provides plots that depict the daily positions and residuals for a CORS. In my May 2024 newsletter, I stated that NGS has developed a Beta CORS Time Series Tool that provides information that assists users in selecting appropriate CORS for a project. The Beta CORS Time Series Tool provides the residual differences from the daily NGS OPUS-NET solutions with the coordinates from the official CORS’ coordinate functions. The excerpt below explains the plots and residuals:
This tool computes and displays the residuals for up to 50 CORS stations within the NCN. The mean, standard deviation, and root-mean-square error of the residuals are also provided in a summary table that is available for download. This tool is informational, not authoritative.
The residuals are calculated as the difference between the daily observation at a station and the official daily coordinates for a station. The daily observation is processed from the GPS L1 and L2 signals only, using a network adjustment program. There must be a minimum of 8 hours of data present in a 24 hour file for a solution to be generated. The network adjustment program is an internal application developed by NGS for monitoring the position of the CORS stations in the NCN (Gillins et al., 2019). The official daily coordinates for a station are calculated using the reference epoch (2010.0) position and velocity published as the station coordinate function in the Position and Velocity File. An example of a Position and Velocity File for NCN station GODE can be found here. To obtain Position and Velocity Files for NCN stations please visit the NCN Station Pages and navigate to the Coordinates and Velocities section.
This tool is optimized for plotting data extending between 30 to 90 days in length but can be customized to other time frames. The earliest start date currently available is October 27, 2018, which is the completion date of the MYCS2 and the end date can be as recent as 3 days before the present day. This three-day time lag is so that the final orbits can be used in the network adjustment to create the daily solutions. Then, please enter the 4-character station ID for at least one and up to 50 CORS stations in the NCN and submit this request to obtain a map, summary table of comparative statistics, and residual plots during the date range.
The beta NGS NCN station pages show similar plots to the Beta CORS Time Series Tool. the station pages also allow users to create position and residual plots at different periods. I find these plots very useful when selecting CORS to be included in a GNSS project. The latest plots are of interest to users when selecting CORS to be included in their GNSS project but there are reasons to look at plots depicting older time periods.
Position and residual plots for TXLV.
I previously mentioned that the antenna of CORS TXLV was changed on August 5, 2021, so I used the option to plot the last five years to include data before and after the date the antenna was changed. I highlighted August 7, 2021, on both plots. This was two days after the antenna was changed on CORS TXLV.
There appears to be a 2 cm upward shift in the up component after the new antenna was installed. There was also a change of about 1 cm in the north component. Something else to notice in the position plot is that the east component has a significant tilt during the five years. The below provides the ITRF2014 velocities — the eastward component velocity is —1.21 cm/year. In 5 years, one could expect to see about a 6 cm change.
Position and residual plots for TXLV.Five-year position plot of TXLV.Five-year residual plot of TXLV.Position plot of TXLV for selected time interval.
These small changes affected my analysis and network adjustment results. During the past several years, I have participated in several Harris-Galveston Subsidence District (HGSD) GNSS projects performed in the Houston-Galveston, Texas, region. I have been involved with estimating subsidence in the Houston-Galveston, Texas, region for about 40 years so when I see changes in height values indicating an apparent uplift it makes me question my results. Therefore, I started investigating the CORS involved in the GNSS project. I looked at the Texas CORS surrounding the GNSS project: WHARTON CORS, COLUMBUS CORS, HEMPSTEAD CORS, LIVINGSTON CORS, and LIBERTY CORS.
The table below provides the differences between the published ellipsoid height and the previous superseded height for the five CORS. As the table indicates, the published ellipsoid height of the CORS increased by about 2 cm from the superseded height. This led me to use the NGS NCN Station Pages to investigate these CORSs. I found that all five of these CORSs had new antennas installed in 2021 and their position plots depicted a similar shift.
I want to emphasis that I am not saying that anyone did anything wrong or incorrect. The CORS manager of these sites provided the appropriate metadata to the NGS CORS team so the site information could be updated and correctly reported. What this indicates to me is that the installation of the new antenna and setup may have affected the height component of these CORS, that is, it may have changed the official position of the monument’s reference point. Again, I want to emphasize that I am not saying that anyone did anything wrong or incorrect. NGS’s process includes monitoring all CORS that are part of the NOAA CORS Network (NCN). The NGS CORS Team noticed the significant change in the up component comparing it to its expected value, so they computed a new coordinate and published the new coordinate in 2022. In my opinion, anyone using these CORSs as constraints in their GNSS projects after the date that the new antenna was installed and before the new coordinate was published could have generated adjusted heights that are in error by 2 cm. As previously stated, when you are estimating heights to the 2 cm level, changes in published NAD 83 (2011) CORS heights at the 2 cm level are significant. In my opinion, this type of analysis should be performed by all users that are incorporating CORS in their GNSS processing.
CORS ID
PID
Station Name
Published Ellipsoid Height (m)
Published Date
Date the New Antenna was Installed
Date Station Coordinates Superseded
Superseded Ellipsoid height (m)
Difference Between Published and Superseded Heights (cm)
txwh
DL9086
WHARTON
8.615
04/22
4/28/2021
06/19
8.595
2.0
txcm
DL9812
COLUMBUS
45.481
04/22
3/17/2021
06/19
45.459
2.2
txhe
DH3608
HEMPSTEAD
48.823
04/22
5/06/2021
06/19
48.803
2.0
txlv
DN4508
LIVINGSTON
29.100
04/22
8/05/2021
06/19
29.075
2.5
txli
DH3612
LIBERTY
-9.782
02/22
5/06/2021
06/19
-9.802
2.0
Keep checking NGS beta site because NGS makes changes based on user feedback. As I previously stated, I would encourage everyone to access the beta site and provide your feedback to NGS. NGS states on the site that “This is a Beta product. We are interested in your feedback. Please email us at: [email protected] and indicate the subject as “NCN Station Pages Feedback.” I have talked to the CORS team and they really would like feedback. The team will make changes to the website based on feedback from users.
RapidFlight has been awarded a $10 million contract from the United States Department of the Air Force (DAF) under the AFWERX Autonomy Prime program. Under the contract, RapidFlight will develop and produce the SPX, a customizable, autonomous fixed-wing aircraft system.
The project objective is to design and produce the SPX UAV, featuring a 12 lb. payload capacity, 150 nm range, and a modular payload bay. The RapidFlight Common Avionics 2.0 will be used to support autonomous flight with various payloads.
During the initial phase of the 36-month contract, RapidFlight will design SPX UAVs for testing at the Autonomy Prime Proving Ground. This will be followed by a contractor-owned, contractor-operated (COCO) demonstration at the RapidFlight facility in Manassas, Virginia. Comprehensive training for USAF operators is also included.
Each SPX system includes four airframes, a ground control station, a field kit and a compact launcher. The system’s modular design supports a range of payloads, sensors and autonomy packages for rapid and economical real-world flight testing.
Safran Federal Systems has released a line of tactical-grade inertial measurement units (IMUs). These units are engineered to address the evolving needs of unmanned applications and space-based operations.
The IMUs include Iconyx, a high-performance HRG-based IMU that significantly outperforms legacy technologies, the company says. It offers improved accuracy and reliability for demanding navigation needs. It also features a small tactical IMU (STIM) ideal for applications requiring lower size, weight and power (SWAP).
The company is also upgrading its Geonyx inertial navigation system (INS), which is based on HRG technology, to incorporate M-Code capability. The fully integrated solution can perform in GPS-denied or spoofing environments, offering reliable navigation in challenging environments.
Safran Federal Systems unveiled these IMUs at the Joint Navigation Conference (JNC) 2024 in Cincinnati, Ohio. Attendees are invited to visit Safran Federal Systems at Booth A to learn more.
The Federal Aviation Administration (FAA) has granted Amazon Prime Air permission to operate UAVs beyond visual line of sight (BVLOS). This allows Prime Air to expand its UAV delivery service to more customers and scale operations across the U.S.
Prime Air’s BVLOS operations rely on detect-and-avoid technology, which allows UAVs to autonomously navigate obstacles for safe flight operations. Amazon provided the FAA with detailed engineering data and conducted flight demonstrations, which included real-world scenarios involving planes and hot air balloons, to validate the system’s safety.
With this FAA approval, Prime Air will extend its delivery area in College Station, Texas, using its MK-27 UAV. The service will integrate into Amazon’s existing delivery network, with UAVs deploying from facilities adjacent to same-day delivery sites.
Prime Air received an Air Carrier Certificate in 2020. The recent BVLOS approval further extends its capabilities, allowing Amazon to access more densely populated areas. The UAVs aim to deliver packages within 30 minutes or less.
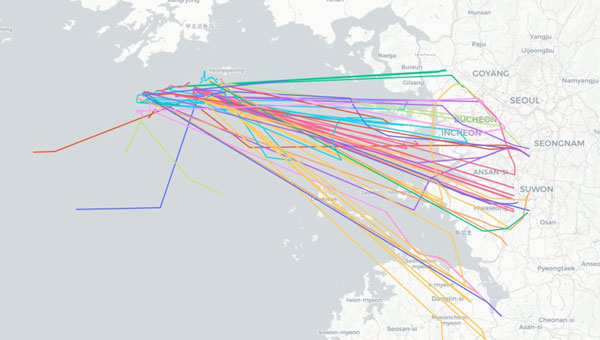
Aircraft operating near Seoul, South Korea spoofed to points in the ocean 28 to 30 May 2024. (Image: SkAI Data Services)
On the morning of May 30, 2024, Benoit Figuet posted on X that 40 aircraft operating into and out of South Korea had been spoofed over the previous 18 hours.
Professor Jiwon Seo at South Korea’s Yonsei University reports that the interference has, as of June 3, entered its fifth consecutive day.
Benoit Figuet is the co-founder of SkAI Data Services in Zurich, Switzerland. In collaboration with the Zurich University of Applied Sciences, SkAI created the world’s first public Live GPS Spoofing Tracker website. The site uses ADS-B data to detect and display in near-real time, aircraft being spoofed around the world.
South Korean military authorities have identified North Korea as the source of interference.
While the spoofing exhibits many of the same traits as interference in the Black Sea and elsewhere, Figuet has noted some differences. “We even see aircraft impacted at low altitudes,” he said. “We have observed this happening below 5,000 feet and even affecting an aircraft taxiing on the ground at the airport. The source must be at a reasonably high elevation or fairly close by.”
North Korea has a history of engaging in hybrid, non-kinetic warfare by interfering with GPS in the South, though this is the first large-scale event since one lasting from March 31 through April 5, 2016.
During the 2016 event, five different locations along the border of South Korea were identified as sources of interference. One is at an elevation of approximately 740 m and only 30 km from Inchon International Airport.
Another unique feature of the ongoing interference, according to Figuet, is the dynamic nature of the spoofed location. Unlike previously observed “circle spoofing,” the reported locations generally appear as tracing a figure eight pattern in the ocean near a point where the territorial seas of both countries meet.
Some of the spoofed locations have also been observed drifting over the North Korean border.
Local media have reported that the interference seems to be in conjunction with maritime maneuvers being conducted by the South Korean Navy and police vessels. The North has complained about intrusions into its territorial sea during these operations, a claim disputed by South Korea.
To help counter the effects of the North’s interference, South Korea has added to and upgraded its eLoran system. It has also included the eLoran upgrade in a comprehensive resilient PNT architecture that includes television signals and plans for a regional positioning, navigation and timing (PNT) satellite system.
According to Pyo-Woong Son, Ph.D., “South Korea is set to enhance its navigation and service reliability with the fully operational and established eLoran system. This system is expected to ensure that ships can navigate safely even during large-scale GPS signal disruptions, like those the country has recently experienced.” Son is a Senior Researcher at the Korea Research Institute of Ships and Ocean Engineering.
“In addition to maritime applications, eLoran will significantly contribute to the reliable operation of autonomous vehicles, such as urban air mobility (UAM), which are rapidly gaining popularity as future modes of transportation.”
“Furthermore, eLoran will play a crucial role in enhancing the reliability of public and private sector services, including broadcasting, telecommunications, and finance, where precise timing synchronization is essential,” according to Son.
Loran-C was used in many aircraft for decades before the advent of GPS. While eLoran signals are available across most of the Far East, receivers are not included in the navigation suites of commercial aircraft.
Aircraft operating into and out of Incheon International Airport have, so far, been able to use local terrestrial aviation-specific navigation aids to safely approach, land and depart.
Mr. Dana A. Goward is President of the Resilient Navigation and Timing Foundation and is a frequent contributor to GPS World.
VIAVI Solutions has launched its altGNSS geosynchronous orbit (GEO) SecureTime services designed to deliver nanoseconds-accurate UTC timing through L-Band and Ku-Band satellite signals. It is ideal for critical infrastructure including 5G networks, transportation, data centers, smart grid, high-frequency trading, military and first responder communications and satellite terminals.
The company said that operating independently of traditional GNSS, VIAVI’s altGNSS GEO service is difficult to jam or spoof and offers broad global coverage, further improving resistance to attacks.
SecureTime adds to the portfolio of solutions VIVAI offers for resilient PNT, and features navigation message authentication (NMA), which uses encryption to detect spoofing in any of the signals received from all sources — including GPS that does not support NMA. It builds on VIAVI’s existing multisource assurance, combining signals from government and commercial constellations across GEO, low-Earth orbit (LEO) and medium-Earth orbit (MEO).
These services have been tested and proven in live-sky battlefield scenarios, providing assured PNT in a simulated warzone with complete denial of GNSS signals.
VIAVI will integrate these services into its products and offer receivers for third-party solution providers to integrate into their systems. VIAVI’s SecurePNT 6200 hardware platform is powered by space and terrestrial SecureTime Services and TrustedPNT multisource fusion technology.
VIAVI is showcasing these solutions at the Assured PNT Summit on May 29-30 in Washington, D.C. and the Joint Navigation Conference (JNC) held June 3-6 in Cincinnati, Ohio.
Safran Federal Systems will host a simulation training seminar on July 16, 2024, at The Westin Huntsville in Huntsville, Alabama.
Attendees are invited to engage in interactive training and hands-on sessions guided by experts for PNT and NAVWAR simulation using Safran Federal’s BroadSim and Skydel software.
Training topics include:
BroadSim fundamentals, M-Code, and automation
GNSS jamming and spoofing
NAVWAR simulation – bringing PNTAX to life
How to test CRPA antennas
Each attendee will earn a certificate to recognize participation and completion of the training. Click here to learn more and register.
The Baltic, Ukraine, and the Middle East may be hotbeds of GPS interference that can hamper UAV operations, but these are not the only places in the world where it is happening.
It also happened in San Diego at the premier event for UAV operators— the XPOTENTIAL 2024 conference of the Association for Uncrewed Vehicle Systems International (AUVSI).
AUVSI is the world’s largest nonprofit organization dedicated to the advancement of uncrewed systems and robotics. Members present included corporations and professionals from more than 60 countries involved in industry, government and academia and work in the defense, civil and commercial markets.
One of NavtechGPS’ directional finder identifies the source of interference at AUVSI’s Xpotential 2024 in San Diego. (Image: Dana Goward)
Among conference attendees were Franck and Trevor Boynton of NavtechGPS, a small Northern Virginia company specializing in GPS products and related services. One of their services is locating devices that are interfering with GPS reception.
“In our work around the country we have found a wide variety of devices interfering with GPS,” said Franck Boynton. “It’s a lot more common than you think. We found truckers with jammers interfering with port operations, for example,” he said. “But accidental interference is an even bigger problem. Most of the time we find it is just some malfunctioning equipment making the radio noise.”
Boynton’s experience is consistent with the 2019 European Union STIKE3 sampling project that detected more than 450,000 signals with the potential to interfere with GPS and other satnav signals. Experts determined that only about 10% of those were intentional. The rest seemed to be a byproduct of mechanical and electrical equipment not functioning quite properly.
Of course, intentional or accidental, interference with GPS signals can be a problem for both manned and unmanned aircraft, vessels and vehicles.
Intentional interference in conflict areas has turned UAVs and missiles away from their targets, and in some cases, back on attackers. It has impacted the safety and efficiency of aviation and maritime traffic nearby. As one example, regular jamming in the Baltic region recently resulted in the cancellation of scheduled commercial air service to a city in Estonia.
Accidental interference has caused survey UAVs to crash and created multi-day problems at the Denver and Dallas-Fort Worth major airports.
In at least one instance accidental interference almost ended in tragedy. In 2019 a commercial passenger aircraft near Sun Valley, Idaho nearly crashed into a mountain. Fortunately, a sharp-eyed radar controller hundreds of miles away intervened and directed the aircraft back on course.
Nearly 600 vendors filled the AUVSI XPOTENTIAL exhibit hall this year. While perusing the displays, the Boyntons detected a strong signal interfering with GPS frequencies. Thinking it was coming from one of the exhibits, they were surprised to find that not only did it turn off and on but it seemed to be moving around.
Using one of the direction finders that NavtechGPS sells, they were able to track the source to a film crew roaming the hall and speaking with exhibitors and attendees. The wireless microphone being used for interviews turned out to be the culprit. Since the film crew was unable to repair or replace the mic, the interference continued intermittently inside the hall for the rest of the event.
“Interference of all kinds with GPS and other satnav signals is a growing problem,” according to Franck Boynton. “As we continue to implement more autonomous systems, it will be increasingly important to ensure they have resilient navigation, and we eliminate as many sources of interference as possible.”
AUVSI did not respond to requests for comment for this story.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: ESA
Detecting dark matter with atomic clocks
A team of researchers from Belgium’s Royal Observatory, SYRTE in Paris, the Université Côte d’Azur and the European Space Agency have used atomic clocks to search for dark matter transients in space. The team focused on a network of passive hydrogen masers (H-masers) on board the fleet of Galileo satellites to detect these transient variations. They presented a new technique that interprets fluctuations in fundamental constants as a specific kind of frequency modulation — a discrepancy in the expected times indicated by the satellite clocks. The findings are detailed in a paper titled “Searching for large dark matter clumps using the Galileo Satnav clock variations.”
Photo: H2L Robotics
Gardening Robots
H2L Robotics has deployed fully autonomous agricultural vehicles enabled by artificial intelligence (AI) across farmlands in the Netherlands. The robots are tasked with spotting and eliminating diseased tulip bulbs ahead of the country’s financially significant spring tulip bloom. The Selector180 robot uses GNSS to autonomously drive through tulip fields, and onboard cameras to take thousands of photos. An AI model then sorts the images, looking for potentially diseased bulbs. Finally, the Selector returns to the fields and removes diseased bulbs to prevent disease from spreading.
Photo: DoorDash
Deliveries from the sky
DoorDash has expanded its partnership with Wing to bring its UAV delivery pilot to the United States. DoorDash users who are near the Wendy’s fast food restaurant located at 2355 N. Franklin Street in Christiansburg, Virginia can order eligible menu items from the restaurant. They will see the new delivery option on the checkout page. Once they select the “drone” option, their order will be prepared and delivered via a Wing UAV within 30 minutes.
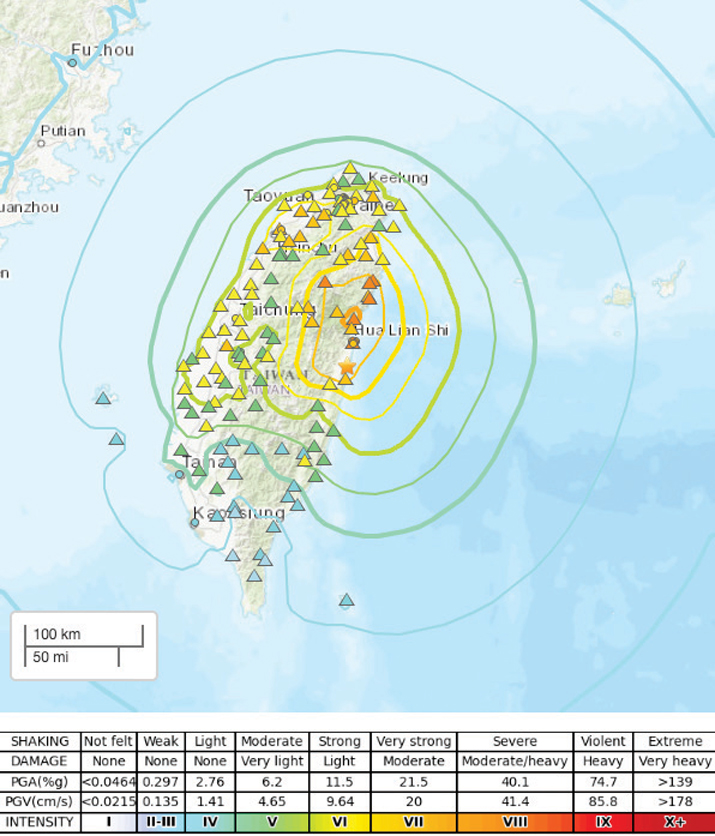
Photo: USGS
Earthquake strikes Taiwan
A 7.4-magnitude earthquake struck the eastern coast of Taiwan on April 3, according to the United States Geological Survey. USGS has released a ShakeMap providing near-real-time maps of ground motion and shaking intensity following the earthquake. According to USGS, the earthquake and aftershocks were strong enough to be felt across the island nation and parts of mainland China and Japan.
How can commercial space help bridge the GPS vulnerability gap by providing alternative PNT services?
“With the proliferation of commercial SATCOM services being launched to provide global broadband services, there is an opportunity to leverage these capabilities to also augment positioning, navigation and timing (PNT). The Defense Science Board has been directed to consider this and is evaluating how these commercial alternatives, such as PNT signals-as-a-service, could supplement GPS if technical and logistical challenges could be overcome.
With the recent announcement of Iridium buying out Satelles for $115M and the apparent interest in the U.S. Department of Defense (DOD) to consider using commercial alternatives to provide backup PNT, this is likely to spur other innovations in this space and bring more players (and investors) to the market. This has the potential to significantly increase PNT resilience around the world by enabling the use of existing SATCOM services, with a wide diversity of spectrum allocations separated from GPS, allowing operation
in a GPS-denied environment.
Deployment also can be accelerated by leveraging commercial manufacturers of SATCOM equipment who can rapidly release commercial products with alternative embedded PNT capability that can provide aiding data through the Modular Open Systems Approach (MOSA) standards already developed for A-PNT devices in the DOD acquisition process.
The major barrier to adoption of these services, however, could be the anemic funding being provided for adoption of commercial space services to Space Systems Command’s new Commercial Space Office (COMSO).”
A roundup of recent products in the GNSS and inertial positioning industry from the May 2024 issue of GPS World magazine.
SURVEY & MAPPING
Photo: Virtual Surveyor
UAV With planimetric survey capabilities
The Virtual Surveyor version 9.5 now allows users to quickly and accurately survey 2D features from UAV orthophotos and add them to the 3D topographic model generated from the same data set.
True 2D features, for example, include the paint striping that delineates parking lot spaces and road lanes. Other objects that exist in 3D on the ground but can be surveyed in two dimensions include building footprints and tree canopies. These features are designed to offer a new level of efficiency to the UAV surveying process in Virtual Surveyor.
Virtual Surveyor provides users with an end-to-end workflow to conduct 3D surveys from UAV imagery. The integrated Terrain Creator app photogrammetrically processes UAV photos to build survey-grade digital surface models (DSMs) and orthomosaics. No third-party software is needed to create surveys from UAV data. The system is ideal for users in construction, surface mining and excavation projects.
Positioning System Incorporates an anti-jamming and interference monitoring system
SXblue GLOBE merges GNSS and GIS to deliver positioning accuracy, efficiency and reliability in challenging field conditions using a 448-channel GNSS board.
Its advanced multipath mitigation aims to reduce the effects of signal reflection and ensure the integrity of positioning service, even in GNSS-challenged environments. The SXblue GLOBE incorporates an anti-jamming and interference monitoring system, safeguarding against disruptions and offering uninterrupted operation in any scenario.
The system uses global or local coverage of correction services, satellite-based augmentation system (SBAS), and real-time kinematics (RTK) with an update rate of up to 100Hz. This seeks to provide users with enhanced accuracy and reliability in positioning activities. Sxblue GLOBE features a Wi-Fi connection, which allows its parameters to be easily configured via a web user interface.
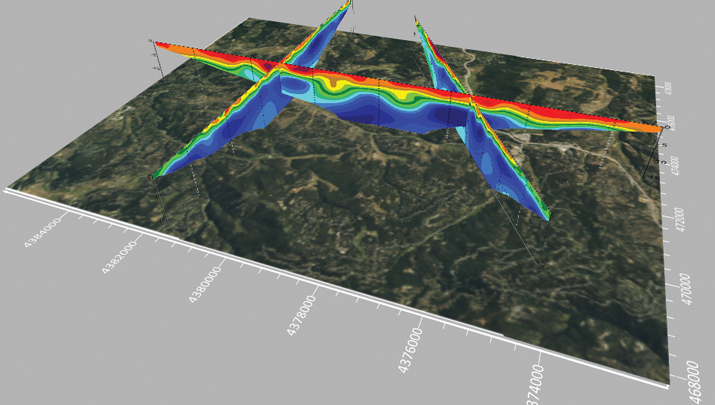
3D Mapping Software With expanded visualization tools
The Surfer mapping and 3D visualization software now features upgraded 3D visualization capabilities. The upgrades are designed to give users a complete picture of collected subsurface data. The expanded visualization tools in the latest Surfer version make it easier to create 3D grid files for viewing and analysis of drillhole data.
Surfer can be used for environmental consulting, water resources, engineering, mining, oil and gas exploration and geospatial projects.
With these upgrades, users can render 3D grids as a series of blocks, which can be colorized by a select variable. Images of cross sections, profiles and other features can be imported directly into 3D View and oriented in any direction or angle. To isolate certain features in the 3D grid, users can assign NoData to portions of the grid with a variety of methods. This allows users to eliminate unwanted data in a 3D grid outside of field boundaries, well locations, or above or below specific surfaces, such as a water table, topography, or lithologic layer.
Digital Twin Platform Shows roadway incidents in real time
The Flow RT is a real-time digital twin platform designed to provide agencies with instantaneous alerts and insights for better decision-making. The platform allows traffic managers to view traffic conditions, signal operations and roadway incidents in real time, at scale across entire regions.
Flow RT integrates seamlessly with the company’s solutions, including traffic signal management, roadway safety management and mobility management. Powered by connected vehicle data from industry-leading partners, including TomTom, the platform offers up to five times higher vehicle data penetration rate than the previous industry standard. Flow RT also provides alerts and notifications while offering data-driven decision support, ensuring agencies can make the best decisions using the most accurate, reliable and instantaneous insights with and without infrastructure connectivity.
INS With an integrated acoustic resonance air speed sensor
Inertial Labs has integrated the FT Technologies FT743-D-SM acoustic resonance air speed sensor into its inertial navigation systems (INS).
This integration aims to improve the accuracy of horizontal air speed estimation for multi-rotor UAVs, even in GNSS-denied environments. The FT743-D-SM airspeed sensor is a digital anemometer-based solution that can estimate airspeed incoming from any direction using acoustic resonance technology, which is immune to vibration and external acoustic noise. The airspeed magnitude and direction allow the INS to estimate horizontal air speed in the longitudinal and lateral axes.
The INS receives aiding data from the dual-axis airspeed sensor and experiences significantly less position drift compared to a dead reckoning alternative in GNSS-denied environments, the company said. The system can be used in mission-critical roles in multiple military or defense applications, as well as in civilian applications such as wind energy, marine navigation, UAVs and dynamic positioning systems.
The SE868K5-RTK module is a GNSS receiver capable of centimeter-level accuracy. It is designed for seamless operation near cellular or other radios and is suitable for precision applications.
At 11 x 11 mm, the module’s compact form factor offers adaptability in size-constrained scenarios and easy migration within the xE868 product family. It is designed to offer high-performance navigation, even in challenging RF conditions. The solution can be integrated into applications such as wearables, UAVs, robots, fleet tracking and precision agriculture.
The SE868K5-RTK is a multifrequency and multi-constellation positioning receiver module with RTK capabilities that enhance positioning accuracy. By harnessing dual frequencies — L1/E1 and L5/E5 — the module offers improved location precision and reduces multipath effects.
In partnership with Swift Navigation, the SE868K5-RTK module utilizes local base stations or Swift’s Skylark precise positioning service for corrections, which offers reliable centimeter-level accuracy across an extensive coverage area. The integration and Telit Cinterion’s cellular modules and NExT connectivity services offer continuous and accurate correction data delivery to the GNSS module.
Upgraded Click Board Now with an integrated GNSS receiver module
The Septentrio mosaic-X5 GNSS receiver has been integrated into the MikroElektronika (MIKROE) Mosaic Click board.
Mosaic Click is compatible with mikroBUS socket standard, allowing plug-and-play prototyping and reduced time-to-market. The mosaic-X5 receiver uses triple-band GNSS technology to achieve centimeter-level RTK accuracy, even in challenging environments. Its anti-jamming and anti-spoofing technology protects the receiver from malicious or accidental radio interference. It is ideal for applications where safety is a concern, as well as autonomous and mission-critical applications of systems such as UAVs or industrial robots.
The mosaic-X5 receiver tracks all available GNSS constellations and is protected by Septentrio’s AIM+ anti-jamming and anti-spoofing technology. Full GNSS raw data and positioning are delivered at a high update rate of 100Hz and with low latency, which is critical for autonomous movement and maneuvering.
RTK Positioning Module Supports all GNSS constellations
The Linnet mosaic-X5 is a multi-band module featuring the Mosaic-X5 receiver by Septentrio. It receives signals from all major constellations and can be used both directly on the rover and as a base station. The system can achieve centimeter-level positioning accuracy and attain precise positioning even in low-coverage zones and harsh vibrations and shocks.
The mosaic-X5 module is a 448 channels all-in-view receiver that supports all GNSS constellations, SBAS and QZSS, as well as built-in on-module support for other L-band correction services. The Linnet Mosaic-X5 features anti-jamming protection and anti-spoofing built-in and embedded spectrum analyzer.
The module can be used in a variety of applications, including tracking, surveying, autonomous navigation, ground robotics, precision agriculture and machine control.
Geo-hNAV is a rugged, hybrid dual-GPS-aided INS. It offers consistent position and attitude measurement accuracy whether the platform is static or moving. The Geo-hNAV combines the Geo-iNAV INS with the Geo-Pointer dual-antenna heading system.
For stationary or slowly moving platforms, precise heading is derived from GPS measurements using two GPS antennas rigidly mounted on the platform, separated by a typical distance of 1 to 3 meters. In dynamic conditions, the combination of GPS and IMU seeks to provide enhanced position, velocity and attitude measurements. The system can be used for geo-positioning onboard sensors on static, low and high dynamic platforms such as aerostats, boats and tanks.
The C631 is a multi-GNSS, multi-frequency smart antenna. The C631 provides robust performance and high precision in a compact and rugged package. With multiple wireless communication ports and an open GNSS interface, the C631 can be used in a variety of operating modes.
C631 can be used as a precise base station sending RTK to existing rover networks. Users can turn the C631 into a lightweight rover by connecting it to a base via UHF radio or Wi-Fi network. The built-in web user interface can be used to control and manage the receiver status and operation and upgrade the C631 with new firmware and activations.
Atlas is a global correction service that can be added as a subscription to the C631. Atlas delivers worldwide centimeter-level correction data over L-band communication satellites.
The YEGB000Q1A and YEGN000Q1A active GNSS L1 and L5 antennas are designed to tap into L1 and L5 frequency bands for advanced navigation applications. These antennas, operating within the 1164-1189 MHz and 1559-1606 MHz frequency bands, are designed to support a variety of installation methods, catering to diverse application needs with options for screw mount, adhesive mount, magnetic mount and various cable connections.
The antennas are part of a broader release that includes the YEMN016AA and YEMN017AA 5G 5-in-1 combination antennas, which also feature GNSS capabilities.
These GNSS antennas are crucial for applications that require high levels of navigation accuracy, such as autonomous vehicles, UAV delivery systems and precision farming.
The TW5387 industrial-grade smart GNSS antenna integrates the Quectel ST TESEO V GNSS receiver chipset onto the Calian compact smart GNSS antenna platform. It is designed to offer dual-band GNSS, eXtended filtering, low phase center variation, low signal-to-noise ratio and dual feed and patch for strong multi-path rejection.
The TW5387 comes with RTK rover capability and a built-in IMU for sensor fusion. It is designed to minimize RF impairments that affect the performance of the GNSS receiver and provide GNSS coordinates to the host system over a robust digital interface for noise resilience.
TW5387 is suited for automotive, UAV, robotics and defense applications that require high precision location and timing. TW5387 is compatible with N-RTK correction services such as Point One Navigation’s Polaris and Swift Navigation’s Skylark. It tracks GPS, Galileo, BeiDou and L1/L5 band operation and is housed in an industrial-grade IP69K enclosure.
The PEANGPS1005 is an active GPS/GNSS multi band L1/L2/L5 antenna with 47.5 dBi overall gain. It is IP69K rated, light weight and designed for surveying. This GPS/GNSS antenna is suited for harsh operating environments where stability and reliability of GPS/GNSS signal is required.
This antenna operates in the 1.164-1.3GHz and 1.525-1.615GHz bands, meeting GPS L1/L2/L5, GALILEO E1/E6/E5a/E5b and GLONASS L1/L2/L3 requirements. The PEANGPS1005 antenna has an integrated LNA with 2 dB noise figure and LNA gain of 40 dB.
The antenna has an axial ratio of 3 dB and can track visible satellites under extreme conditions, which is ideal for UAV navigation, autonomous tracking or GIS surveying.
Paving and Mining Solution Meets DOT smoothness standards
The MC-Max asphalt paving and MC-Max milling solutions offer modularity, simplified configurations and advanced feature sets to increase productivity in asphalt paving and cold milling applications.
The MC-Max Asphalt Paving and MC-Max Milling systems, which are made up of , total stations, displays and other high-precision sensors, are built with the new MC-X machine control platform. Users can choose from entry-level 2D systems that follow a reference, such as a string or a curb, or automated solutions that track a paver or miller in 3D.
Contractors can pave and mill at variable depths while meeting smoothness standards mandated by the U.S. Department of Transportation (DOT) smoothness standards. The solutions also include MC-X licensing options. The technology is compatible with OEM CAN-based systems and has expanded to include compatibility with additional aftermarket systems.
It is equipped with Topcon Virtual Ski intelligence software designed to simplify workflows in specific resurfacing applications, such as rural roads where there are fewer fixed points or intersections to match up to.
Reality Capture Platform Generates detailed 2D and 3D models
This UAV reality capture platform collects data through FlytBase UAVs and generates detailed 2D and 3D models on SkyeBrowse, a UAV reality capture platform.
The platform uses SkyeBrowse’s videogrammetry technology to quicly convert UAV video footage into 2D maps and 3D models, making it ideal for emergency response scenarios where rapid documentation is critical. The platform integrates seamlessly with beyond visual line of sight (BVLOS) systems, enhancing both the speed and quality of data-driven strategies in critical operations.
The E400 fixed-wing VTOL ISR UAV now features a 360° camera option. Partnering with NextVision, the Event 38 UAV now offers a range of EO/IR Gimbal camera options for seamless integration with the E400 platform.
NextVision’s gimballed EO/IR cameras capture visual and thermal imagery and video. The UAV provides live streaming directly to ground stations for continuous monitoring capabilities.
The 360° EO/IR camera integrated onto the E400 ISR can be used for search-and-rescue missions, suspect pursuit, emergency management and disaster response. The E400 ISR, built with a military-grade carbon fiber frame, offers durability for rugged field applications and allows for extended flight durations without the need for frequent recharging. It is suited for surveillance and security applications. It features electric propulsion and minimal noise emissions for discreet flight operations.
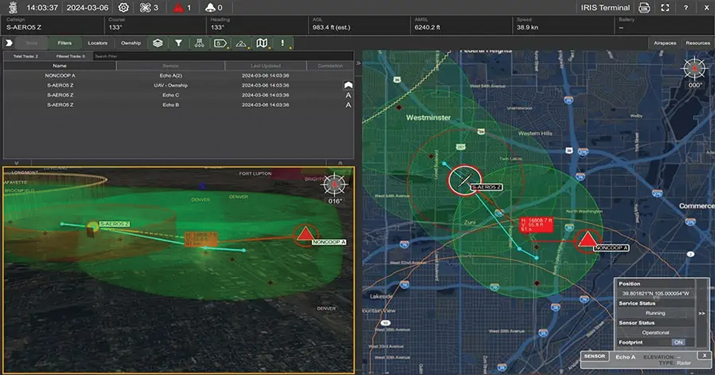
Enhanced BVLOS System Offers situational awareness to UAS operators
IRIS Terminal now features Echodyne radar technology designed to enhance Beyond Visual Line of Sight (BVLOS) operations for unmanned aerial systems (UAS) in Advanced Air Mobility (AAM) applications.
The integration seeks to provide situational awareness to UAS operators by visualizing all airspace movement, cooperative and noncooperative, to ensure safe and reliable UAS operations.
IRIS Terminal, now in its second generation, has been adapted from its defense origins to the enterprise UAS sector for visualizing airspace traffic, as well as controlling uncrewed systems in its GCS format. Airspace traffic is visualized inside IRIS Terminal’s multiple viewing configurations, along with features such as detect-and-avoid (DAA) sensor footprints, terrain awareness and potential conflict warnings.
The Inertial Labs’ RESEPI lidar remote sensing payload instrument GEN-II has been integrated into Sony’s Airpeak UAV.
The partnership seeks to enhance Airpeak’s ability to produce detailed aerial maps and 3D models.
Tailored for professionals, the lidar system integrated into Sony’s Airpeak UAV will significantly enhance workflow efficiency and data accuracy, particularly in sectors such as construction, agriculture, and filmmaking, according to Inertial Labs. The system allows for extensive data handling and facilitates longer durations of data collection without frequent offloads. The UAV can be used for surveying, mapping and cinematic videography.