The Grimaldi Satellite Autonomous Berthing (GSAB) project, funded by the European Space Agency (ESA) Navigation Innovation and Support Program (NAVISP) program, has developed a system for automatic, high-precision port berthing operations in large (200m) carrier ships. The system offers ship captains and crew with an overview of ship conditions in real time port settings, including detailed information on maneuvering operations.
Project leader Grimaldi Euromed, in collaboration with two divisions of Kongsberg, conducted the research and development of the new system, including integrating various sensors to provide accurate positioning and ranging data with high integrity. The GSAB system suggests the best path for berthing based on all available and relevant information sources, while augmented reality (AR) goggles provide an intuitive method of visualizing critical berthing information.
System subcomponents include an inertial navigation system (INS) where GNSS measurements are fused with motion/attitude data from the Kongsberg motion gyro compass (MGC). This allows the system to deliver robust and precise data on vessel location, velocities and acceleration. A perception system includes a camera-based sensor for determining steel-to-steel distances from the vessel to any obstruction and quays.
Kongsberg illustrated increased efficiency using to the new system, including a clear reduction in the time required to enter and exit from a port, and a corresponding decrease of emitted pollutants.
Radiolabs, a non-profit research organization, recently joined the GSAB consortium. It focuses on investigating and prototyping a new ground truth reference system, which integrates and fuses GNSS, IMU, and lidar-derived data to provide highly accurate positioning and ranging.
At the recent final presentation of the GSAB project, hosted by ESA, Federica Pascucci of Radiolabs described the results of the project, based in part on previous work in the automotive sector. She said the GSAB work was promising, having verified the effectiveness of Radiolabs’ lidar-based system for positioning, with adaptations necessary for application in maritime scenarios.
The GSAB project demonstrated significant potential cost and time savings benefits and improved safety and environmental performance. The partners will continue their work in the framework of a new ESA NAVISP-funded project, GSAB2, to demonstrate the system’s use in increasingly autonomous vessels and apply newly developed, advanced algorithms based on artificial intelligence.
ComNav Technology has launched the M100X GNSS receiver. It is built with the Quantum-III SoC Chip, designed to provide full-constellation and multi-frequency capabilities, specifically engineered for high-accuracy vehicular positioning and heading.
The M100X features GNSS+INS integrated technology to provide real-time high-precision positioning, velocity and heading data, even in challenging environments.
The receiver is designed to provide accurate positioning and heading information across various applications, including autonomous mining trucks, intelligent ports, mapping and autonomous buses. It is designed to safeguard vehicles as they pass through areas with poor signal reception, even in obstructed environments such as urban canyons, city overpasses underground garages, tunnels and parks.
The M100X has a data update rate of up to 100Hz, allowing it to perform well in dynamic, high-speed environments, such as vehicles traveling at high speeds. This rapid update capability enables continuous and real-time tracking of vehicle positions for reliable computation and instant updating of navigation information. It also facilitates quick responses to changes in vehicle dynamics during travel. These features are essential for maintaining seamless operation in high-speed environments and ensuring high levels of safety and performance.
Constructed with aluminum alloy and rated IP67 for water and dustproof, the receiver is built to withstand harsh operational environments. It also features a shock-resistant design, capable of surviving a drop from 1 m without damage. It can connect to 4G, LAN, Bluetooth and multiple I/O ports for seamless integration with various systems and networks.
ComNav has also released Navigation Master software, an Android app for quick device configuration and effective remote management. Using Bluetooth connectivity, users can easily configure their M100X devices for optimal performance. Additionally, its cloud platform, NaviCloud, offers instant access to projects and data from any location.
American Aerospace, an Iridium partner, has received a waiver from the Federal Aviation Administration (FAA) to conduct UAV surveillance of critical infrastructure in California’s San Joaquin Valley for Chevron, an oil and gas company.
Enabled by Iridium’s global L-Band satellite connectivity, AATI’s AiRanger UAV will conduct remote aerial surveillance of the energy company’s pipeline and production facilities. Iridium’s network offers beyond visual line of sight (BVLOS) connectivity, including remote command and control (C2) and detect and avoid (DAA) capabilities. The UAV will send information via Iridium satellites to conduct routine inspections.
Iridium partner Blue Sky Network customized and integrated its SkyLink 7100 voice, data and BVLOS terminal on the UAVs. The SkyLink 7100 offers continuous tracking and C2 capabilities for aviation and UAV operations.
The AiRanger is the first UAV to comply with industry standards for the DAA system and meet FAA BVLOS operation requirements. This achievement aims to pave the way for broader use of BVLOS UAVs to enhance situational awareness, reduce inspection costs and maximize value.
Commander, Naval Surface Force, U.S. Pacific Fleet Vice Adm. Brendan McLane is rung in upon his arrival to the establishment ceremony for Unmanned Surface Vessel Squadron 3 (USVRON 3) on Naval Amphibious Base Coronado May 17, 2024. The squadron is comprised of unmanned Global Autonomous Reconnaissance Crafts (GARCs). The 16-foot GARCs built by Maritime Applied Physics Corporation enable research, testing, and operations that will allow integration throughout the surface, expeditionary, and joint maritime forces. (Photo: U.S. Navy photo by Mass Communication Specialist 1st Class Claire M. DuBois)
The U.S. Navy has created Unmanned Surface Vessel Squadron (USVRON) Three at Naval Amphibious Base Coronado. The squadron, equipped with Global Autonomous Reconnaissance Crafts (GARCs), aims to enhance the Navy’s capabilities by integrating unmanned systems into surface and joint maritime operations.
GARCs, developed by the Maritime Applied Physics Corporation, facilitate research, testing and operations for seamless integration across surface, expeditionary and joint maritime forces. These crafts will be used for various missions, including operations with carrier strike groups and surface action groups. Additionally, the squadron will introduce a new robotics warfare specialist rating to oversee and operate these systems.
The mission of USVRON Three is to provide the most powerful unmanned platforms in the maritime domain. The squadron will play a key role in establishing the knowledge needed to operate and maintain sUSV. It will develop tactics, techniques and procedures for small unmanned surface vessel (sUSV) operations and sustainment. USVRON Three’s motto is “Victory Through Ferocity.”
Photo: Space Surveillance Operations Center (COVE)
The Spanish Ministry of Defense has awarded a $2.9 million contract to GMV, for the development, deployment support and maintenance of the Space Situational Awareness and Control System (CCSE). The system will be used at the Spanish military Space Surveillance Operations Center (COVE).
Under the contract, GMV will conduct orbit calculation and propagation, build-up and maintenance of a space object catalog (both open and classified), prediction of atmospheric reentry, calculation of overflight events, planning of observation and sensor calibration campaigns, calculation of GNSS signal degradation and integration and processing of space weather data.
This system is expected to go into service at the end of 2024. To comply with this timeline, it will be based on GMV’s Ecosstm system, which is being used in other operational environments such as the German Armed Forces’ Space Domain Awareness Center (Weltraumlagezentrum), the civilian space surveillance systems of various other countries such as Greece and GMV’s commercial space surveillance center known as Focusoc.
The COVE, which is operated by the Ministry of Defense (MINISDEF) through its Space Command (MESPA) of the Spanish Air and Space Force (EA), was created in November 2019. The center reached its initial operational capability (IOC) in 2021.
GMV has been supporting the center and assisting its participation in the Global Sentinel exercises organized by the U.S. Space Command. As part of its support, GMV has supplied its operational orbit determination tool, Sstod, for processing data from the Spanish space surveillance radar located at the Morón Air Base, near Seville, Spain.
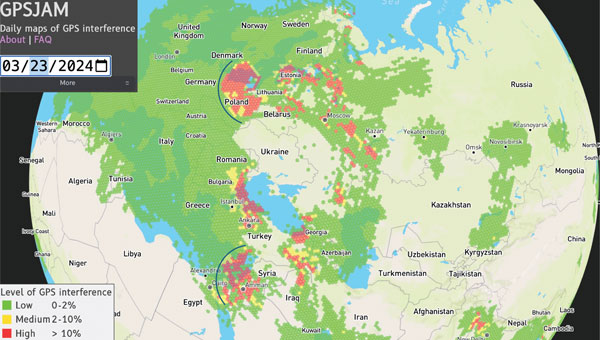
Figure 1: GPSJAM map on March 23, 2024. The map is based on GPS accuracy reports fron aircraft broadcast digital radio messages (ADS-B) over a 24-h period. A vast (uncolored) area on the globe is not covered because of no ADS-B report. Arcs are drawn over part of Europe and the eastern Mediterranean to help visualize the cone of the interference coming from potential jamming power sources. (Photo: GPSJAM.org)
GPS services are critical for real-time information on positioning, navigation and time (PNT). Because of the highly accurate and continuous PNT solution provided by GPS in all weather conditions, this multi-use technology has been adopted for civil applications including some for transportation, agriculture, aviation and emergency services. The increasing societal dependence on GPS has also created a set of security vulnerabilities for these applications.
GPS applications are vulnerable to signal interference, spoofing and degraded or denied services. Both intentional — jamming — and unintentional signal interference can cause inaccurate PNT and poor navigation performance. In addition, GPS service may be intentionally degraded or disrupted during military operations and system testing. Environments in which the GPS service is unavailable or severely degraded require alternative solutions for PNT.
Several countermeasures have been implemented to mitigate the vulnerabilities of GPS receiving systems including flex power operation and signal encryption/authorization initiated by the service provider and signal filters and adaptive antennas implemented by a user. For example, a new military signal, M-code, from GPS III satellites has an improved anti-jamming capability in both the L1 and L2 frequency bands. GPS III can broadcast signals using a high-gain directional antenna, in addition to a wide-angle, full Earth antenna, which produces a restricted area spot service by manipulating signal strength. Such flex power operations help improve GPS performance in the presence of jamming. The flex power operation is different from the so-called Selective Availability (SA), which was an intentional degradation of civilian GPS signal accuracy globally. SA operation was discontinued in May 2000, so GPS services are always available for civil applications worldwide.
However, the transparency and openness of GPS services for peaceful uses is facing a hard reality, as the balance between peacetime and wartime applications can quickly change due to geopolitical conflicts. Attacking and overcoming GPS vulnerabilities has become a fast-evolving battlefield in modern electronic warfare. Jamming and spoofing of GPS — and other GNSS — have increased substantially in the eastern Mediterranean, Baltic Sea, and Arctic regions since Russia’s invasion of Ukraine. This was officially documented by the European Union Aviation Safety Agency in Safety Information Bulletin 2022-02R1 issued in November 2023.
For example, on March 23 to 24, 2024, widespread GPS jamming occurred in Eastern Europe that impacted more than 1,600 aircraft over a period of two days and was widely reported by mass media. The source of this massive jamming event was thought to be in Russia’s Kaliningrad exclave between Lithuania and Poland. As shown in FIGURE 1, the panoramic cone in the jammed region appears to support this speculation. Similar events with large-scale jamming occurred on December 25 to 26, 2023; January 19, February 2, 12 and 14; and March 1 to 3, 13, 15 to 16 and 18, 2024, according to GPSJAM.org. In addition, Figure 1 reveals a wide area of jamming in the eastern Mediterranean where the Israel-Hamas and Israel-Hezbollah conflicts are taking place.
The increased level of GPS jamming has had a significant impact on global science observations over the conflict regions, including low-quality measurements for soil moisture, and atmospheric and ionospheric soundings, as reported in the March issue of GPS World. In addition, NASA has observed many more dropouts from in-orbit GPS receivers in recent years, which degraded the ephemeris information used for scientific data. As the pattern of apparent GPS jamming continues, alternative filtering of the spaceflight GPS data would be required to safeguard continuous science operations.
The study reported in this article aims to provide a global perspective on recent GPS jamming and degraded services. Since late 2019, commercial CubeSat constellations such as Spire have provided atmospheric measurements with much-needed global coverage and spatiotemporal sampling. The amount of GNSS data increased from about 7,000 observations per day in 2020 to about 20,000 per day in 2022 thanks to the observation demand from weather and climate research.
Table 1: Spire satellite groups and GPS satellites observed.
SPIRE CUBESAT CONSTELLATION
Spire Global has flown more than 100 Low Earth Multi-Use Receiver (LEMUR) CubeSats since 2014. These cost-effective CubeSats are used to track maritime, aviation and weather activity from space, and can be replenished at a relatively fast pace for a low-Earth orbit (LEO) constellation. TABLE 1 lists the Spire CubeSats used in this study, showing their orbital inclination, flight model ID and the tracked GPS pseudorandom noise (PRN) code ID. Spire receivers track GPS L1C/A and L2 signals for precise orbit determination (POD) and radio occultation (RO) measurements with 1-Hz and 50-Hz sampling respectively. These Spire POD and RO data collections — from November 2019 to the present — are part of a contract under NASA’s Commercial Smallsat Data Acquisition Program.
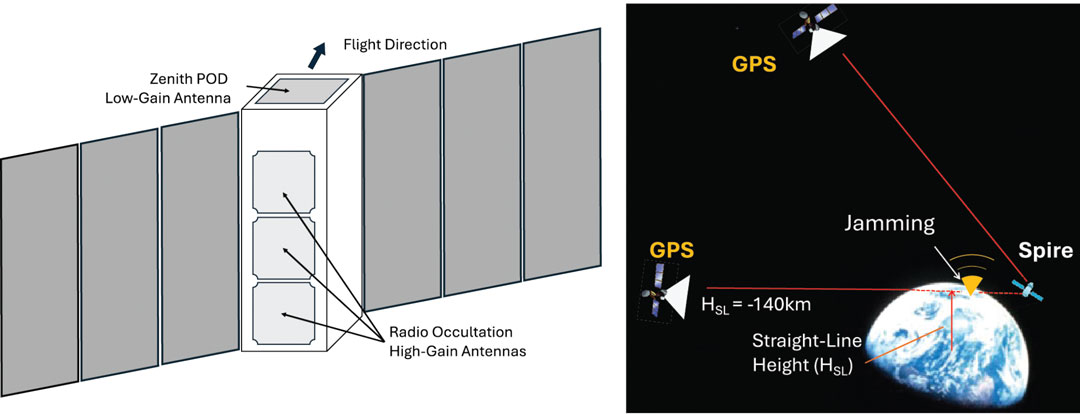
Figure 2: A schematic of the Spire 3-unit (10 x 10 x 34 cm) LEMUR CubeSat showing a zenith-view POD (precise orbit determination) and a limb-view RO (radio occultation) antenna for GPS measurements. There are usually two RO antennas on the fore-and-aft line with respect to the flight velocity, but only one POD antenna is mounted at the top. (Photo: Dong L. Wu)
The Spire LEMUR spacecraft have gone through several generations and expanded capabilities from atmospheric sounding with GPS radio occultation (GPS-RO) to GPS reflectometry (GPS-R) for soil moisture and ocean winds, grazing-angle reflectometry (GPS-GR) for sea ice and GPS-POD ionospheric sounding for space weather. In essence, however, as illustrated in FIGURE 2, these measurements are made available from two types of antennas on the satellites: a low-gain POD antenna and a high-gain RO antenna. As the measurement capability and performance improved, these antenna designs have become increasingly sophisticated and may differ substantially from satellite to satellite. Thus, it is imperative to characterize these antenna patterns carefully before comparing their signal amplitude or signal-to-noise ratio (SNR).
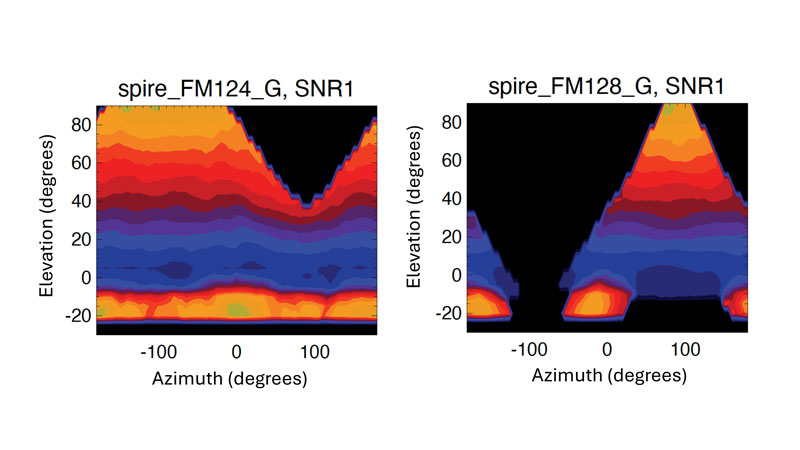
Figure 3: POD antenna patterns derived empirically from Spire FM124 and FM128 data as a function of elevation and azimuth angles. The elevation angle is defined as the angle of GPS line-of-sight (LOS) above the spacecraft horizon. The azimuth angle is defined as the difference between GPS LOS and spacecraft velocity azimuth angles with respect to the north. A 5° x 5° bin size was used in the averaging. Colors are the mean L1 SNR in arbitrary unit from two-month data aggregation. The antenna patterns of L1 and L2 signals are assumed to be same.
Instead of using ground calibration data, we employed an empirical method using the flight data to derive Spire’s POD antenna patterns. For each CubeSat, we aggregated a few months of POD data according to the GPS-POD link direction, in terms of elevation angle and azimuth angle with respect to the satellite flight direction. The averaging of such a large ensemble of measurements allows us to smooth out the fluctuations due to ionospheric scintillations and GPS service power variations. Two examples illustrated in FIGURE 3 show drastically different antenna patterns and designs between Spire FM124 and FM128. The larger antenna gain values at high positive elevation angles are expected for the commercial off-the-shelf (COTS) planar POD antenna pointing at zenith, whereas the gain at the bottom of negative elevation angle range is an added feature in this antenna design to enable a limb sounding of ionospheric electron density. To monitor the GPS service power, we use only the SNR measurements at positive elevation angles greater than 30° using the antenna pattern normalized by the mean values in this angular range.
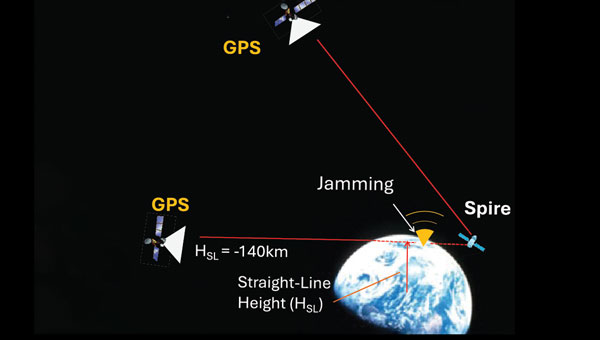
We analyzed both Spire POD and RO SNR data. The POD SNR data are used to determine the GPS service power, while the RO SNR data are used to estimate the jamming power or jammer-to-noise ratio (JNR) from the surface. The POD SNR data at high elevation angles are mostly from free space but need to be corrected for the antenna pattern effect to measure the GPS signal strength accurately. Depending on the GPS-POD link direction, the antenna pattern can cause a large variation in the observed SNR (see Figure 3). For JNR detection, we use the RO SNR data from very low elevation angles (lower than 0°) with a straight-line height (HSL) of less than -140 kilometers. At this height, a tracked GPS satellite is completely obscured by Earth and the RO receiver is essentially measuring the receiver system’s noise. Thus, any enhanced “noise” would be considered as a jamming signal. The RO antenna pattern is less critical in this case because the locations of ground jamming sources are unknown and their signals are weak at spacecraft altitudes. Roughly speaking, the RO antennas tend to acquire signals within a horizontal field of view (FOV) of 60°, corresponding roughly to a swath of about 1,800 kilometers at the surface. Therefore, the RO JNR has a coarse spatial resolution and represents a collective emission from the ground sources.
DEGRADED SERVICE AND JAMMING
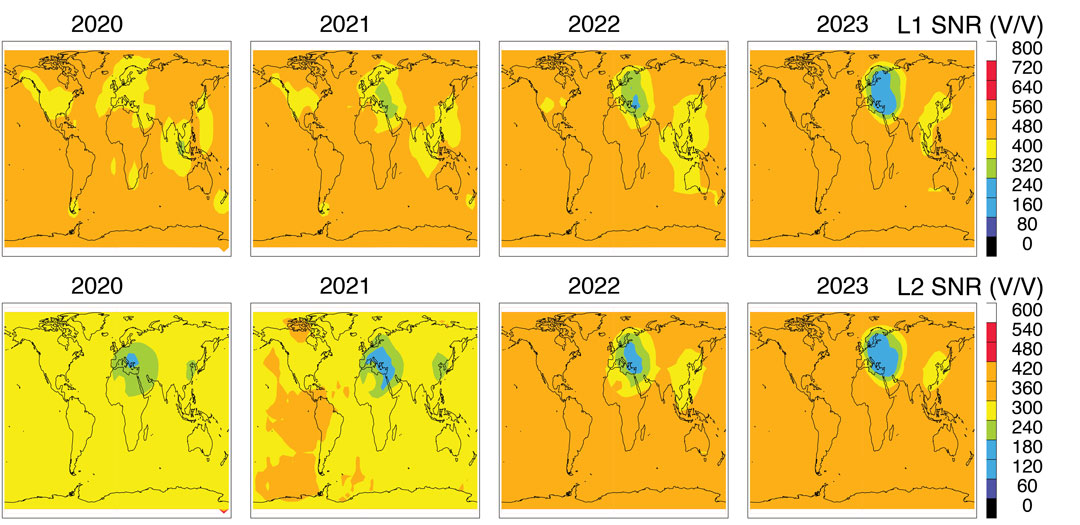
To monitor GPS service power, we normalized the Spire POD SNR with the empirically calculated antenna pattern for each CubeSat. The normalized SNR data are averaged to produce a global monthly map and then annual maps (see FIGURE 4). The L1 and L2 SNRs from Spire represent an average GPS power at an orbital altitude of about 530 kilometers. The normalized SNRs are geo-registered using the CubeSat location where the measurement was made.
Variations between different GPS satellites as well as between different Spire CubeSat altitudes are neglected in this study. Broadcasting powers from the GPS satellites may differ by a small (about 10%) amount between PRNs, which manifest themselves as a slightly inhomogeneous distribution in the maps (see Figure 4). The impacts of the Spire orbital altitude on the estimated GPS power are small, compared to the regional GPS power reduction seen over Europe.
Further improvements can be made to produce a more accurate estimate of the GPS power as well as a time series of power changes from individual PRNs.
There is a clear GPS power reduction in the L1 and L2 signals over several targeted regions. The reduction appears to differ between L1 and L2 bands during the 2020 to 2023 interval. The most prominent power reduction regions are Europe and the Middle East, where the L2 reduction started as early as 2020. Although the L1 reduction is present in this region, it deepened after 2021 and perhaps widened more in 2022 and 2023. The degraded services for a targeted region are consistent with the new capability of GPS III in operation.
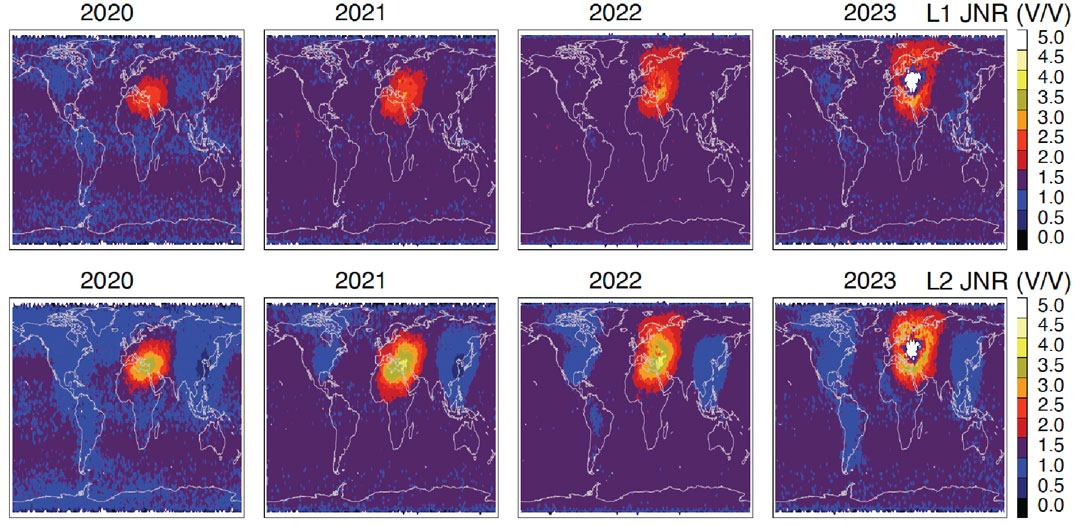
Figure 4: Annual mean GPS L1 (top panel) and L2 (bottom panel) SNR distributions observed by Spire POD receivers for 2020-2023. (Photo: Dong L. Wu)
A relatively small GPS power reduction can be found in East China and Southeast Asia in the 2020 to 2023 period. The L1 power reduction in this region reveals a shift from Southeast Asia in 2019 to East China in 2023, whereas the L2 reduction appears to be concentrated in East China during these years. While geopolitical tensions in this region did not escalate to any wars, electronic warfare operations have been widely reported over the South China Sea, the East China Sea, and the Philippines since 2017.
Jamming detection from space is a more challenging task because of the generally weak JNR at the height of orbiting receivers. In addition, a wide antenna FOV of GPS receivers could yield less accurate geolocation of jamming sources. However, jamming detection has been made from several LEO satellites by various teams of scientists and engineers. By tracking the front-end noise of an RO receiver on the MetOp satellite, researchers were able to detect the elevated noise power originating from ground-based sources. Also, using the radio frequency spectra recorded with a nadir-viewing receiver on the International Space Station, investigators demonstrated the feasibility of detecting jamming and spoofing signals from the ground. It has been shown that the location of jamming/spoofing sources can be pinned down accurately with observations from two satellites. This technique laid the foundation for a new class of space intelligence missions such as the DEEP prototype, STRATOS and HawkEye-360. Studying the SNR perturbations in POD data from GRACE and COSMIC-1/2, it was possible to generate global maps of jamming hotspots from 2007 to 2016. Investigators have made use of the enhanced noise in delay Doppler maps of down-looking GPS-R receivers for jamming detection. Recently, we analyzed GPS-RO SNR measurements at the tangent heights obscured by Earth and reported the increased level of jamming in northern Africa, the Middle East and the eastern Mediterranean after 2018.
Compared to nadir-view techniques, jamming detection from limb views has some advantages and disadvantages. Disadvantages have been associated with the long path length between the source and the receiver, resulting in a potentially weak JNR and poor geolocation of jamming sources. On the other hand, if jammers chose to radiate the power horizontally for a wide areal impact, it would allow limb-view sensors to pick up the jamming power and identify the directionality of jamming sources by comparing the JNR observed from opposite look angles.
FIGURE 5 As in Fig. 4 but the L1 and L2 JNR are derived from the Spire RO SNR measurements at HSL < -140 km. A 3 V/V background noise is subtracted from the SNR measurements to obtain the JNR. In 2023 the white region inside the enhanced jamming is caused by the quality control (QC) of Spire data processing that excluded the RO data with a low free-space SNR. (Photo: Dong L. Wu)
Without any sophisticated data processing, in the study for this article, we simply averaged all the RO L1 SNR data at HSL less than 140 kilometers to extract the JNR power by subtracting a 3 V/V (volts per volt) noise from the average (see FIGURE 5). This approach is slightly different from our previous study, which normalized the JNR by the free-space SNR. Because the JNR signals were so strong in 2020 to 2023, no normalization is needed to enhance the jamming detection.
It is not surprising to see in Figure 5 that the worst GPS-jammed region appears in the Middle East and the surrounding area where geopolitical conflicts have broken out frequently in recent years. In the Syria and Libya civil wars, as well as in the Russia-Ukraine and Israel-Hamas conflicts, low-cost UAVs (commonly referred to as drones) and precision-guided munitions were widely used in attacks, which was a major incentive to deploy electronic warfare to jam GPS-guided weapons and operations.
As shown in Figure 5, the JNR power was mostly concentrated in the eastern Mediterranean, the Middle East and northern Africa in 2020 and 2021 but spread to northern Europe after Russia invaded Ukraine in 2022. More JNR power appears to be in the GPS L2 band compared to L1, likely because L2 is a weaker signal and easier to jam and degrade GPS performance in navigation applications.
The regions of GPS signal reduction and enhanced jamming are highly correlated in the Spire observations. The high correlation is expected for the increased use of militarized commercial drones and GPS-guided munitions in the conflict zones. In the Russia-Ukraine war, low-cost GPS-based commercial drones have been imported to the battlefield, as have jamming capabilities. Their modifications and tactical use are evolving rapidly as the conflict continues. A precursor of such massive use of low-cost drones was in the Libya civil war (2014 – 2020), in which thousands of airstrikes were reported. Most of these commercial-grade drones relied on GPS civilian signals for navigation. Therefore, denying or reducing the GPS civilian signal power can help degrade the performance of militarized commercial drones. On the other hand, jamming and spoofing GPS signals remains a cost-effective electronic warfare technique in these conflicts.
CONCLUSIONS
This article has provided an overview of global GPS jamming and service reduction between 2020 and 2023 using recent observations from the Spire constellation. The service power reduction and jamming power increases are highly correlated on a regional scale, showing that Europe and the Middle East have been most impacted by the ongoing geopolitical conflicts. The area of the impacted regions has widened significantly from 2021 to 2023 and spread to Northern Europe. The dual-use civil and military GPS technology and services are currently experiencing an unprecedented scale of electronic warfare attacks.
ACKNOWLEDGMENT
The work reported in this article was supported by NASA’s Commercial Smallsat Data Acquisition program.
Some of us will remember that was how Sgt. Phil Esterhaus ended the morning roll call on the classic TV show “Hill Street Blues.” Although this warning was directed at police officers in carrying out their sometimes dangerous duties, it is good advice to anyone relying on GPS or any of the global navigation satellite systems (GNSS). Why? Although GPS and the other systems work very well in many environments, there are situations where the surroundings, such as those in natural and urban canyons, can block and reflect signals degrading or even denying positioning and navigation capabilities. And that’s not all. Space weather can also occasionally affect GPS and the other systems, limiting their use.
On top of such environmental concerns, we must worry about accidental and intentional disruptions of GNSS by radio frequency interference (RFI). GNSS signals received on or near Earth’s surface are fairly weak — much weaker than, say, cell phone signals — and so can be easily overpowered by nearby stronger radio signals. This is commonly referred to as jamming and there have been many instances of deliberate interference with GPS signal reception in North America and elsewhere. In fact, although its use by civilians is illegal, GPS jamming equipment is available that can stop a GPS-based tracking system from working.
On the other hand, GNSS signal jamming has become a common military tactic and its use is now widespread across the globe. While users might be aware that their navigation equipment is not working due to jamming, there is also the more insidious technique of spoofing, in which false GPS-like signals attempt to trick a receiver into using them rather than the true signals, resulting in an erroneous position report perhaps hundreds of kilometers away from the receiver’s true position.
While the use of GNSS jamming and spoofing can be detected on the ground and by aircraft overflying locations where the activity is taking place, these signals can be more comprehensively studied from space using satellites carrying receivers with appropriate spectrum coverage. In this quarter’s “Innovation” column, a researcher with NASA’s Goddard Space Flight Center reports on studies of GPS signal interference he has conducted using observations from a constellation of low-Earth orbiting (LEO) satellites that use onboard GNSS receivers to provide data for use in operational meteorology and the study of space weather and climate. However, the receivers also intercept jamming and spoofing signals as the satellites pass over conflict zones multiple times per day. It is in these zones and surrounding areas that all users relying on GNSS must be extra careful out there.
This month’s cover story focuses on jamming and spoofing in the military domain, but this is also a big challenge for users of civilian GNSS applications, such as airline pilots. Our July cover story will focus on complementary PNT — that is, non-GNSS sources of positioning, navigation and timing data that can complement GNSS and help make up for its inherent shortcomings, such as weak signals that are easily blocked by thick foliage and roofs, multipath and few satellites in view from natural and urban canyons.
Matteo Luccio
In the coming months, we will steadily increase our coverage of complementary PNT companies, products and services, including those based on low Earth-orbiting (LEO) satellites, because they are an increasingly important component of the PNT industry. We will start by expanding our coverage of this area on our website and in our digital newsletters, then increase coverage in our print editions.
One proposal that has received scant attention, including from this magazine, is to set up a ground-based, cryptographically protected GPS High Accuracy and Robustness Service (HARS) using the internet to distribute data already being produced by the U.S. government and government-sponsored organizations. This was the subject of a white paper released in May 2023 by the National Space-Based Positioning, Navigation, and Timing Advisory Board.
The paper argued that GPS is “falling behind” other GNSS because it relies on augmentation by third-party systems rather than providing such specialized advanced services itself, as BeiDou and Galileo do. While nearly all GNSS chips currently acquire first GPS signals, then those from other systems, deployment by BeiDou and Galileo of sub-meter accuracy services may lead chip manufacturers to reverse this order. If they do, the paper argued, it will cause the U.S. government to lose its strategic advantage in this area and put it in the same position that led the Chinese and European governments to launch their own GNSS programs.
The paper proposed a HARS that would remove satellite orbit and clock errors, ionospheric errors, and tropospheric errors and enhance the ability of GNSS receivers to operate in challenging conditions. This approach, the paper says, could allow Precise Point Positioning (PPP), authentication, and more. It would be “secure and less sensitive to radio noise and disruptions,” protect critical infrastructure, and enable new applications, such as “lane-dependent route guidance in automobile navigation and emergency vehicle guidance.” Additionally, by delivering, along with the corrections, cryptographically signed ephemeris on the same channel, the system would solve the problem of spoofed navigation data.
All of this could be done “without adding cost and complexity to GPS itself” resulting in “a world-class HARS at a small fraction of the cost or time, compared to implementing it on new GPS satellites.” The paper asked for funding for this new service and an agency to operate it, such as the U.S. Space Force or the federal Department of Transportation.
I thank John Betz, Ph.D., of MITRE, for bringing the PNT Advisory Board’s white paper on HARS to my attention. It can be found here.
The NYPD will soon improve its crime-fighting efforts with the Drone as First Responder (DFR) pilot program. Announced by New York Police Department (NYPD) Deputy Commissioner of Operations Kaz Daughtry, the program will deploy UAVs in response to specific 911 calls for serious crimes in progress, such as shootings, robberies, and missing persons.
UAVs will launch from five precincts: the 48th Precinct in the Bronx, the 67th, 71st and 75th Precincts in Brooklyn, and Central Park, New York. The UAVs will provide real-time video and telemetry to officers to enhance situational awareness and safety.
“The information provided by DFR will be shared with responding officers. It will enhance officers’ situational awareness as they arrive on scene, promote officer safety, and help us deploy resources more effectively,” Daughtry said.
The NYPD uses 85 UAVs for various tasks, including monitoring major events and inspecting structural stability after accidents. Despite a 400% increase in UAV use last year, Daughtry emphasized they cannot be used for “warrantless surveillance” or “traffic enforcement.”
According to the NYPD, these UAVs will be deployed in response to 911 calls for service within the next few months. The program will start with four precincts in Brooklyn and the Bronx, chosen “based on recent crime trends.”
SparkFun Electronics has launched the RTK Torch, designed for high-precision geolocation and GIS needs. It has tri-band reception, tilt compensation and millimeter accuracy.
The RTK Torch can provide millimeter-grade measurements. Users can connect a phone to the device over Bluetooth and receive the NMEA output and work with most GIS software.
The RTK Torch features Zero-Touch RTK technology, which gives connected devices WiFi credentials for a hotspot or other WiFi network. The device will begin receiving corrections without any further setup, with no NTRIP credentials required. These corrections are obtained over WiFi from u-blox PointPerfect and are available in the United States, Europe and various parts of Australia, Canada, Brazil and Korea.
The system includes a one-month free subscription to PointPerfect. Additional subscriptions can be purchased if desired. If PointPerfect coverage is not available in the area, corrections from a local base station or service can be provided to the device over NTRIP, delivered via Bluetooth or WiFi.
It is housed in an IP67-rated enclosure. It is waterproof when submerged up to 1 m for up to 30 minutes when the USB cover is closed. Under the hood of the SparkFun RTK Torch is an ESP32, a UM980 L1/L2/L5 high precision GNSS receiver from Unicore, and an IM-19 for tilt compensation.
The addition of the L5 reception makes this portable GNSS device ideal for densely canopied areas where normal L1/L2 reception may have problems.
The device can be used for:
GNSS Positioning (~400mm accuracy) – also known as “Rover.”
GNSS Positioning with RTK (8mm accuracy) – using a local base station.
GNSS Positioning with PPP-RTK (14 to 60mm accuracy) – using PointPerfect corrections.
Swift Navigation has partnered with SK Telecom (SKT) to accelerate the deployment of AI-driven location-based products in South Korea.
Under the collaboration, SK Telecom and Swift Navigation are jointly operating a carrier-grade network to deliver Swift’s Skylark precise positioning service across South Korea, enhancing GNSS accuracy from meters to centimeters.
Skylark, a cloud-based solution, is designed to improve the accuracy of standard GNSS positioning, reducing it from meters to centimeters. This service plays a role in more than 8 million autonomous vehicles and devices, including ADAS-enabled cars, UAVs, vehicle tracking systems and robotic equipment.
Skylark is being used in more than 8 million autonomous and connected devices and will be introduced to SK Telecom’s customer base, including the Korea Forest Service. The partnership aims to improve positioning accuracy for various mobility platforms and is backed by stringent safety and cybersecurity standards.
A leading Canadian hydropower producer is using the Adtran Oscilloquartz grandmaster device combined with its optical cesium atomic clock to achieve new levels of precision, reliability and resilience in its power grid synchronization network.
The deployment addresses the urgent need to implement the highest standards of protection against GNSS disruptions — including jamming and spoofing cyberattacks — and helps bolster North America’s energy resilience. Featuring multi-source protection, the enhanced timing architecture offers a zero-trust approach to positioning, navigation and timing (PNT), ensuring robust and accurate synchronization. It also seamlessly supports existing services, which allows for a smooth transition from legacy timing to power grids with advanced PTP technology. For streamlined operations and assurance, the synchronization network is remotely managed through the Adtran Ensemble Controller with Sync Director.
By enhancing its timing framework with Adtran’s Oscilloquartz solution, the hydroelectric producer is designed to maintain the highest standards of cybersecurity and energy reliability in its critical infrastructure, the company said. The deployment aims to improve the stability and security of the energy supply across Canada and the United States.
The new solution includes Adtran’s OSA 3350 ePRC+ combined with the OSA 5422 to provide precision, stability and resilience against GNSS vulnerabilities. It has an all-digital design, which utilizes optical-pumping techniques, to guarantee timing accuracy and optimal stability for over a decade. This is twice the lifespan of conventional cesium clocks.
With the OSA 5422, the solution future-proofs the utility’s timing network and assures compliance with governmental regulations. It fortifies security and underscores the renewable energy utility’s commitment to maintaining a continuous, secure power supply.