Advanced industrial societies are increasingly reliant on the fantastic capabilities of global navigation satellite systems (GNSS) — GPS, GLONASS, BeiDou and Galileo — and, therefore, increasingly vulnerable to their weaknesses. From providing our position on a map on our smartphone to timing financial transactions, cell phone base stations, and the internet; from steering tractors in the field to guiding first responders; from giving surveyors sub-centimeter accuracy to monitoring continental drift; from providing navigation to ship captains and airplane pilots, to enabling automated control of earth moving machinery, GNSS have become a critical infrastructure. Yet their well-known vulnerabilities — such as jamming, spoofing, multipath and occultation — continue to fuel the development of complementary sources of positioning, navigation and timing (PNT) data, especially for new and rapidly expanding user segments such as autonomous vehicles.
In a January 2021 report, the U.S. Department of Transportation pointed out that “suitable and mature technologies are available to owners and operators of critical infrastructure to access complementary PNT services as a backup to GPS.”1
Several new PNT systems are being developed and deployed that are partially or entirely independent of the four existing GNSS constellations. This cover story focuses on the following companies, products and services:
- Safran Federal Systems (formerly Orolia Defense & Security) makes the VersaPNT, which fuses every available PNT source — including GNSS, inertial, and vision-based sensors and odometry. I spoke with Garrett Payne, Navigation Engineer.
- Xona Space Systems is developing a PNT constellation consisting of 300 low-Earth orbit (LEO) satellites. It expects its service, called PULSAR, to provide all the services that legacy GNSS provide and more. I spoke with Jaime Jaramillo, Director of Commercial Services.
- Spirent Federal Systems and Spirent Communications are helping Xona develop its system by providing simulation and testing. I spoke to Paul Crampton, Senior Solutions Architect, Spirent Federal Systems as well as Jan Ackermann, Director, Product Line Management and Adam Price, Vice President – PNT Simulation at Spirent Communications.
- Oxford Technical Solutions develops navigation using inertial systems. I spoke with Paris Austin, Head of Product – New Technology.
- Satelles has developed Satellite Time and Location (STL), a PNT system that piggybacks on the Iridium low-Earth orbit (LEO) satellites. It can be used as a standalone solution where GNSS signals will not reach, such as indoors, or are otherwise unavailable. I spoke with Dr. Michael O’Connor, CEO.
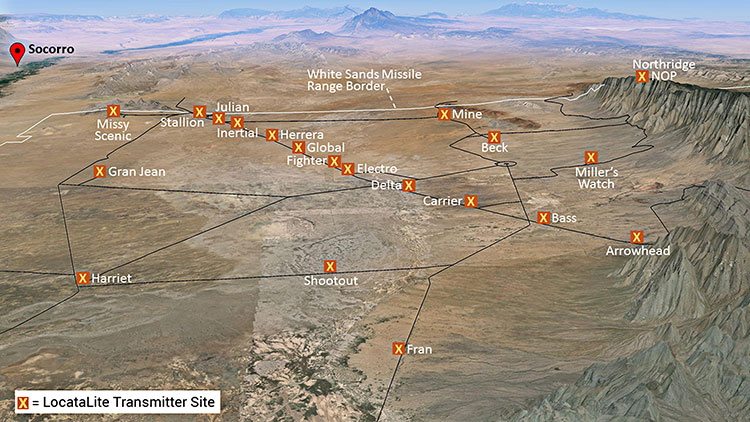
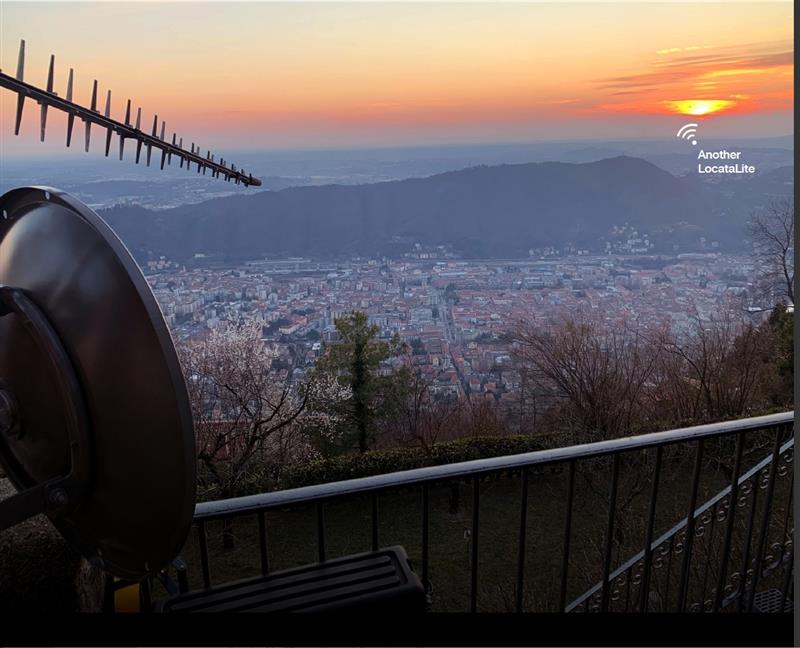
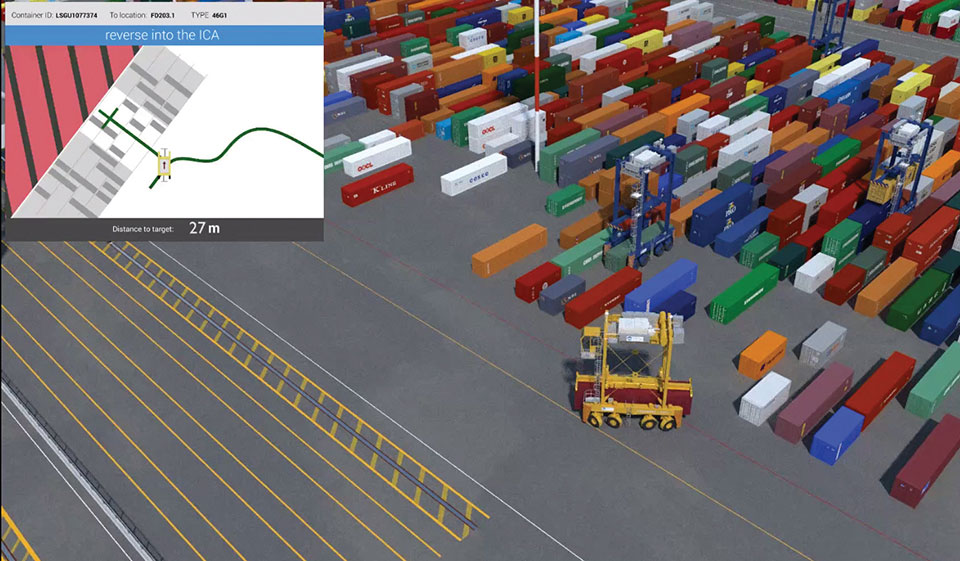
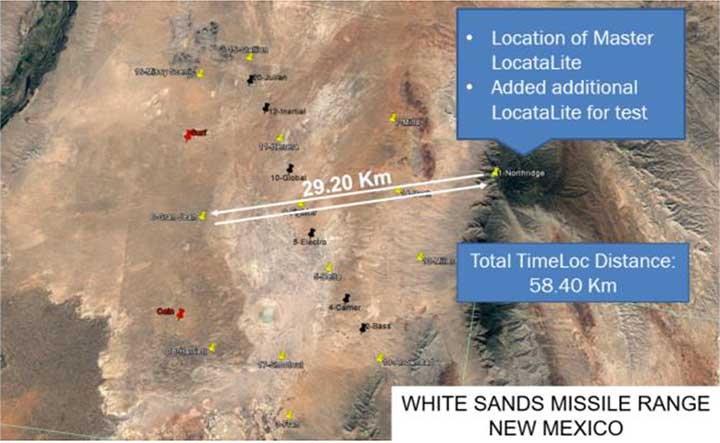
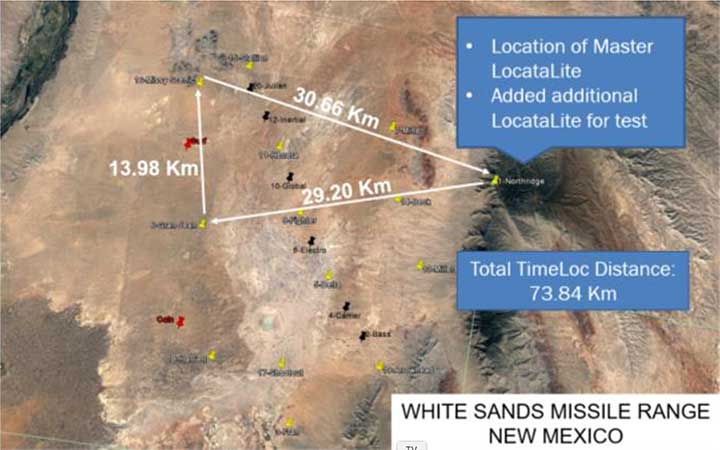
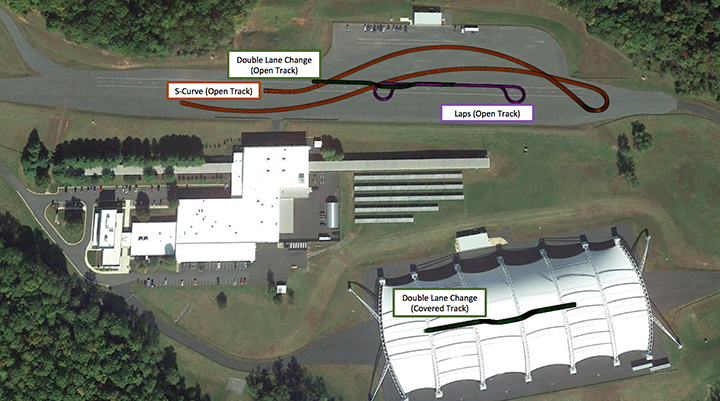
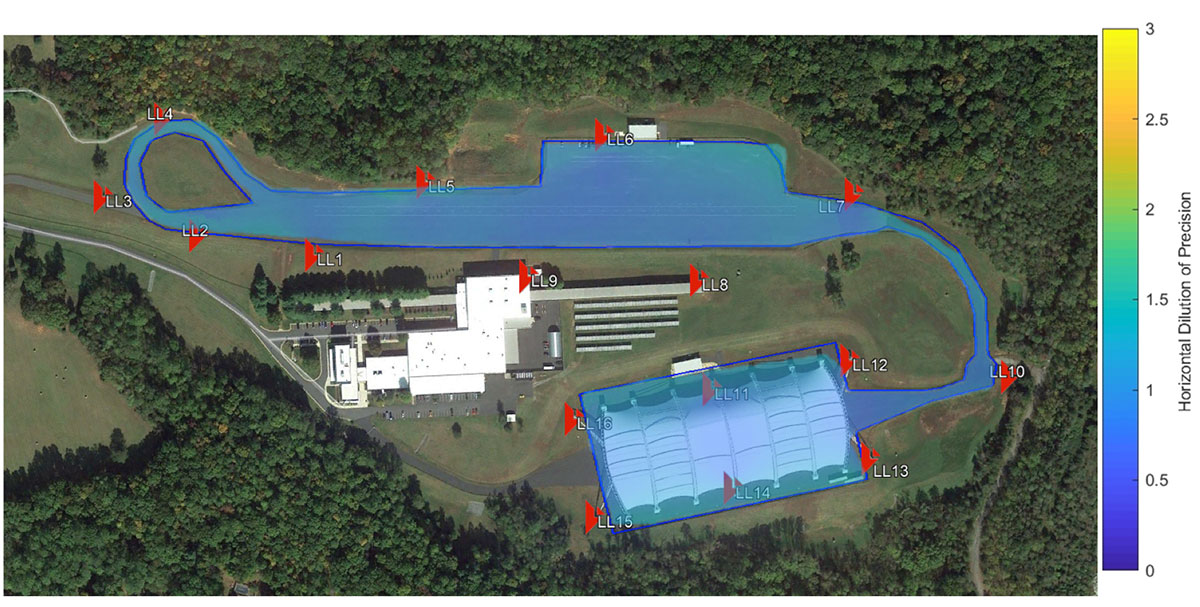
- Locata has developed an alternative PNT (A-PNT) system that is completely independent from GNSS and is based on a network of local ground‐based transmitters called LocataLites. I spoke with Nunzio Gambale, founder, chairman, and CEO.
Due to the limited space available in print, this article only uses a small portion of these interviews. For full transcripts of them (totaling more than 10,000 words) click here.
1 Andrew Hansen et al., Complementary PNT and GPS Backup Technologies Demonstration Report, prepared for the Office of the Assistant Secretary for Research and Technology, Department of Transportation, January 2021, p. 195.

Complementary PNT
“Traditionally, augmentation to GNSS has been done through inertial navigation systems (INS),” Price said. “More recently, ground- and space-based augmentation systems have increased in usage. However, both technologies depend on the absolute positioning information provided by GNSS. They do not represent a true alternative PNT.”
To facilitate the development of advanced and autonomous applications, Price suggested incorporating terrestrial sources of PNT as well as ones based on LEO, medium-Earth orbit (MEO) and geostationary equatorial orbit (GEO) satellites. This, he added, would also keep costs from becoming prohibitive. “LEO brings many benefits in comparison to MEO in just about every industry to which it can be applied,” Jaramillo said.
While mass reliance on GNSS facilitates access to GNSS data and makes devices that use it increasingly cost-effective, over-reliance on a single sensor is risky, Austin pointed out.
“That’s where complementary PNT comes in: if you can put your eggs in other baskets, so you have that resilience or redundancy, then you can continue your operation — be it survey, automotive or industrial — even if GNSS falls or is intermittently unavailable or unavailable for a long time,” Austin said.
It has been said that “the only replacement for GNSS is another GNSS.” Inertial navigation, dead reckoning, lidar, and referencing local infrastructure that, in turn, has been globally referenced using GNSS, enable mobile platforms to maintain relative positioning during GNSS outages. However, absolute positioning will continue to require GNSS. “If you claim to be breaking free from GNSS you’re really saying, ‘I can navigate in this building, but I don’t know where this building is,’” Austin said.
GNSS-INS Integration
GNSS and INS have always been natural allies because they complement each other. The recent completion of the BeiDou and Galileo constellations, which has greatly increased the number of satellites in view, has made the requirement for six satellites at any one time for real-time kinematic (RTK) “a much more reasonable proposition,” Austin said. Coupled with the drop in the price of inertial measurement units (IMU), this has made it possible to “make a more cost-effective IMU than ever or spend the same and get a much better sensor than you ever could before,” he said. “Your period between the GNSS updates is also less noisy and you have less random walk and more stability.”
It used to be that the performance of an accelerometer might far outweigh that of a gyroscope, resulting in excellent velocity but poor heading. “Now,” Austin said, “we can pick a much more complementary combination of sensors and manufacture and calibrate an IMU ourselves while using off-the-shelf gyroscopes and accelerometers. That allows us to make an IMU that is effectively not bottlenecked in any one major area.”
Autonomous vehicles require decimeter accuracy to keep to their lane, while their absolute position is irrelevant to that task. It is, however, essential for map navigation and to know about infrastructure such as traffic signs and stoplights that may not be in a vehicle’s line of sight.
“That’s where the global georeferencing comes in and where GNSS remains critical,” Austin said. “One of the key things we’re examining is GNSS-denied navigation: how we can improve our inertial navigation system via other aiding sources and what other aiding sensors can complement the IMU or inertial measurement unit to give you good navigation in all environments. Use GNSS when it’s good, don’t rely on it when it’s bad or completely absent.”
Nowadays, car makers are increasingly moving their research and development tests from indoor, controlled environments to open roads. Therefore, “they are looking for a technology that allows them to keep doing those tests that they did on the proving ground, but in real world scenarios,” Austin said. “So, they rely on the INS data to be accurate all the time. In autonomy and survey, on the other hand, the INS is used actively to feed another sensor to either georeference or, in the case of autonomy, actively navigate the vehicle. So, that data being accurate is critical because an autonomous vehicle without accurate navigation cannot move effectively and would have to revert to manual operation.”
New vs. Old
Complementary PNT systems differ from legacy GNSS along several variables. One is coverage. For example, Satelles and Xona will provide global coverage, while Versa PNT and Locata are local. Another is encryption. Unlike GPS, which encrypts only its military SAASM/M-code signal, Xona’s PULSAR system will encrypt all its signals, Jaramillo said. “For autonomous applications, security is very important. If you’re riding in an autonomous car, you certainly don’t want somebody to be able to spoof the GNSS signal and veer it off course.”
Additionally, the design of Xona’s constellation includes a combination of polar and inclined orbits, which will greatly improve coverage in the polar regions compared to current GNSS coverage. This is particularly important as climate change makes the arctic more accessible. “The idea of having a LEO-based constellation is to take advantage of what can be done in LEO for GNSS,” Jaramillo said. “If you want the most resilient time and position, you need to use a combination of everything.”
Based on its architecture, Jaramillo said, Xona will provide better timing accuracy than GNSS does today. “Our satellites are designed to use GPS and Galileo signals, as well as inputs from ground stations, for timing reference and will share their time amongst themselves. We will average all these timing inputs and build a clock ensemble on the satellites. That enables much higher accuracies than just having a few single inputs.”
Satelles’ STL service can either substitute for GNSS where the latter is unavailable or supplement it where it is available. When used as a supplement, “the goal is having a solution that is resilient to an outage, interference, jamming, spoofing, those sorts of things,” O’Connor said. “In that case, the receiver card that might be provided by one of our partner companies would have both GNSS and STL capabilities and would take the best of both worlds.” Depending on the product configuration, its locational accuracy is generally in the 10- to 20-meter range, O’Connor said.
Orolia Defense & Security’s Versa PNT “is an all-in-one PNT solution that provides positioning, navigation, and very accurate timing,” Payne said. “Every type of sensor that you’re using for PNT has its strengths and weaknesses. That’s why we have a very accurate navigation filter solution that dynamically evaluates the sensor inputs.” In GNSS-degraded environments, the Versa’s software alerts users that GNSS signals are not reliable, automatically filters out those measurements, and navigates on the basis of the other sensors, such as an IMU, a speedometer, an odometer, or a camera.
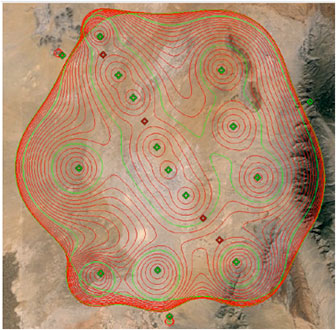
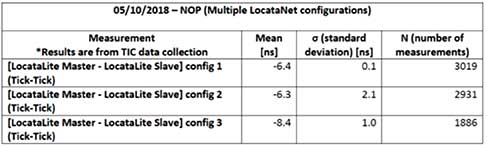
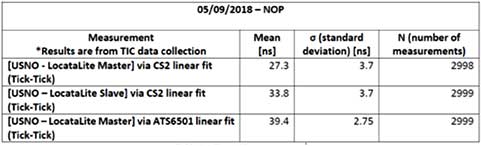
Locata’s system is completely independent of GNSS because it does not require atomic clocks. At its heart is the company’s TimeLoc technology, which generates network synchronization of less than a nanosecond, Gambale said. “TimeLoc,” Locata literature states, “synchronizes the co-located signals with other LocataLites as the signals are slewed until the single difference range between it and the other LocataLites is the geometric range. This internal correction process is accurate to millimeter level.” Applications of this system include indoor positioning for consumer devices such as mobile phones, industrial machine automation for warehousing and logistics, positioning first responders within buildings, and military applications in GPS-jammed environments.
Constellations and Timelines
How long will it take to develop and/or complete these complementary PNT systems?
Xona is a start-up, and its timeline will depend on its success with investors.“We have basically locked down our signal and system architecture. Now, it’s a matter of building out the ground segment and launching satellites,” Jaramillo said.
Xona’s current target is to launch its first satellites into operation by the beginning of 2025 and to achieve full operational capability by 2027. The company will roll out PULSAR in phases. “In our first phase, we’re going to offer timing services and GNSS augmentation that only require one satellite in view,” Jaramillo said. “Then, as we roll out to phase two, we’ll be able to start to offer positioning services in mid-latitudes with multiple satellites in view. Phase three will include high-performance PNT and enhancements globally.”
Satelles’ STL is already on Iridium’s 66 active satellites, which are all relatively new, having been launched between 2016 and 2018, and cover the entire globe constantly. STL’s signal and capability are flexible, O’Connor said.
Orolia Defense & Security is now evaluating UWB computer technology from different vendors and integrating it in the Versa’s software. “We will probably begin performing full field tests in the first quarter of 2024,” Payne said.
Locata’s mission, Gambale said, “is to deliver technology advances which enable complete, independent sovereign control over PNT for companies, critical infrastructure systems, and in the future – entire nations. It’s designed for the many entities and nations which do not have – and can never afford – their own constellations”.
“Our business model,” Gambale added, “is based on enabling others – from companies through to nations – to develop their systems and products based upon our core technology developments. We do not dictate how our technology will be deployed. Locata’s technology can be available to any suitably qualified partner, to fashion our core developments for their own use.”

Business Model
It is challenging for any new commercial entrant in the PNT field to challenge a free global service, such as GPS. While all these new services are the opposite of GPS, which is a gift from U.S. taxpayers to the world, their business models vary somewhat.
“We are targeting both mass market applications and high-performance ones,” Jaramillo said. “For the mass market applications, our business model includes a lifetime fee: a customer pays a fee one time, and the service works for the life of the device. For higher performance applications that have more capabilities associated with them, there will be different tiers, each with different services.”
These will include an integrity service that will verify that the signal has a certain level of performance thresholds, for use in critical applications. “If it drops below certain performance thresholds,” Jaramillo said, “we will flag that to the device so that it knows that, even though it is receiving a signal, it should not continue to use it due to signal degradation.”
Receivers and Chipsets
Predictably, these new ventures have spawned a web of alliances.
The success of both Xona and Satelles will hinge in part on the availability of receivers for their signals. To manufacture them, Xona is “in discussions with just about every tier one manufacturer out there,” Jaramillo said. “We have a strong relationship with Hexagon | NovAtel. They have been supportive of us for a long time now and are very advanced in their development and support for our signals.” Additionally, Xona designed its signals “so that most receivers can support them with just a firmware upgrade.”
Satelles is also working with partners, including Adtran (through their Oscilloquartz product line), Jackson Labs (now VIAVI Solutions), and Orolia (now Safran Trusted 4D). “Companies like that provide the solutions that are favored by critical infrastructure providers today,” O’Connor said. “They ultimately integrate our STL capability into their solutions. They can use our reference designs or create their own custom designs based on our reference designs.”
Satelles uses a different process to take measurements of the STL satellite signals than legacy GNSS. “It’s not a single chip that’s measuring both satellites, it’s ultimately two chips that are making those measurements,” O’Connor explained. “Then, we leave it to our partners to determine how to perform the position calculation and the integration of those signals. It can be integrated loosely or tightly.”
Markets and Applications
The target markets and applications for these new PNT services also vary.
The markets in which Satelles has the highest adoption rates are data centers, stock exchanges and 5G networks, said O’Connor. He pointed out that 5G networks need about five to 10 times more nodes to cover a geographic area than 4G networks.
“GNSS has been used for years to time 4G networks, but most 5G network sites — such as femtocells and picocells — are indoors or in places where GNSS is challenged. We deliver that timing service indoors, outdoors, everywhere.” Generally, an STL-only solution is best suited for timing, O’Connor said. “It will do timing at about 100 ns, depending on what kind of oscillator is being used and the exact configuration of the product.”
Orolia provides precise position, timing, and situational awareness for different applications. “Our systems can be used for ground, air and sea-based applications,” Payne said. “At Orolia Defense and Security we market to the U.S. government, defense organizations and contractors.” Beyond those arenas, however, its systems can be used “anywhere accurate position and/or timing is needed.”

The Role of Simulation
Simulation plays an important role in the development of new PNT systems. “Before the Xona constellation or any other emerging constellation has deployed any satellites, simulation is the only way for any potential end-user or receiver OEM to assess its benefits,” Ackermann said. “Before you can do live sky testing, a key part of enabling investment decisions — both for the end users as well as the receiver manufacturers, and everybody else — is to establish the benefits of an additional signal through simulation.”
Then, new receivers must be validated to ensure they perform as intended. “The best way to do that is with a simulator,” Jaramillo said. “Spirent works with two levels of customers: first, the receiver manufacturers, then all the application vendors that use those receivers.”
Spirent Communications did that for Xona’s system using its new SimXona simulator. “First, we did in-depth validation ourselves,” Ackermann said. “Then, we worked in a close partnership with Xona for them to certify that against their own developments. So, we followed a proven development approach. It’s just that, in this case, the signal comes out of a LEO.” Spirent Communications’ sister company Spirent Federal Systems also provided support to Xona, said Crampton.
Validation and Adoption
The European Commission’s Joint Research Centre in Ispra, Italy, recently conducted an eight-month test campaign to assess the performance of alternative PNT (A-PNT) demonstration platforms, including Satelles and Locata. According to the final report, released in March 2023, the demonstrations “showcased precise and robust timing and positioning services, in indoor and outdoor environments. [T]ime transfer technologies over different means were demonstrated, including over the air (OTA), fiber, and wired channels. The results … showed that all A-PNT platforms under evaluation demonstrated performances in compliance with the requirements set.”
Satelles has also been working with the U.S. National Institute of Standards and Technology (NIST) to evaluate its system. “They have subjected STL to rigorous third-party, hands-off technology evaluations,” O’Connor said. “They confirmed the timing accuracy specifications to UTC and validated the operational characteristics of STL, such as the resilience in the absence of GNSS, the ability to receive the signal indoors, and having global availability.”
The industry is now focused on adoption. “All the providers of these capabilities ultimately need adoption in industry to remain active and viable,” O’Connor said.
With the recent completion of two new GNSS constellations, the growth in the number and variety of augmentation services, and the development and deployment of complementary PNT products and services, the geospatial industry is at an inflection point.

















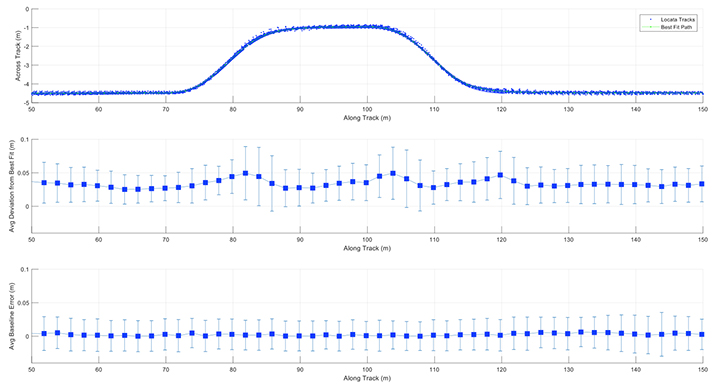
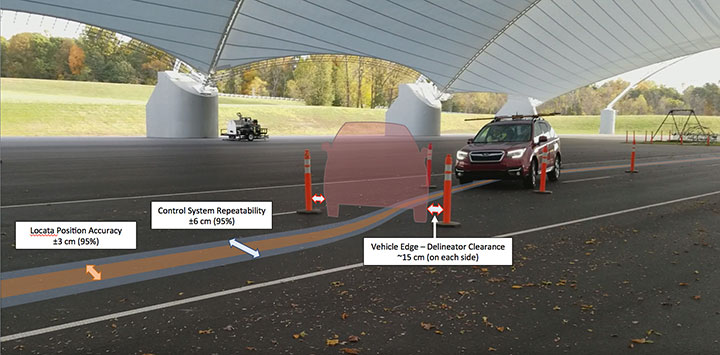
![FIGURE 7. [Brown] Locata position accuracy ±3 cm (95%) using the fixed baseline between two independently operating antenna-receiver pairs in the vehicle (5 hrs of automated driving on both tracks). [Blue] ABD system repeatability ±6 cm (95%) using across track error from 48 repetitions of the Double Lane Change maneuver on the Covered Track. (Figure: D. Aylor, A. Pick, P. Austin and M. Parry)](https://stage.globalpositioningnews.com/wp-content/uploads/2018/08/Figure7_chart-W.jpg)