Hexagon, a global leader in measurement and positioning technologies, has entered an agreement to acquire Inertial Sense, a provider of tactical-grade global navigation solutions and inertial navigation systems (INS), to strengthen the breadth of its positioning portfolio.
Inertial Sense’s capabilities seek to complement Hexagon’s assured positioning, navigation and timing (PNT) portfolio, which provides an affordable, high-performance navigation solution to users across aerospace and defense, robotics and UAV industries.
Inertial Sense has established itself as a trusted provider of high-performance navigation solutions across a wide range of defense and commercial applications, with more than 30,000 inertial systems deployed worldwide. Its patented designs and proprietary technology enable tactical-grade solutions for space-constrained applications, delivering centimeter-level accuracy with a competitive price point.
“Assured PNT is critical to success of our customers,” said Anders Svensson, president and CEO of Hexagon. “The team at Inertial Sense has developed an impressive array of GNSS+INS solutions which address the assured PNT requirements of our customers and fit seamlessly into our aerospace and defense product portfolio, while also providing opportunities for expansion into robotics and UAV applications.”
Inertial Sense, headquartered in Utah, is expected to generate revenues of around $5 million in 2025, with strong growth rates and profitability in line with Autonomous Solution’s average levels. Inertial Sense will be reported within Hexagon’s Autonomous Solutions business area. Completion of the transaction is subject to regulatory approvals and other customary conditions and is expected to be finalized in the first half of 2026.
GNSS technology has had a reputation for unreliability in safety-critical applications, such as advanced driver assistance systems (ADAS). This perception has shaped automotive design and manufacturing: some ADAS developers have avoided GNSS altogether, instead relying on cameras, lidar and other sensors. Here, Manuel Del Castillo, VP of business development at Focal Point Positioning, explains how, with the right reliability, GNSS can offer a powerful layer of redundancy and support these other sensor types.
The hesitation to include GNSS in ADAS stacks is historical. Traditionally, this technology was unreliable, especially in dense, urban environments where satellite signals were obstructed. Consequently, many automakers turned to alternative sensors. For example, cameras can identify lane markings, traffic signs and objects, while lidar can build highly detailed 3D maps of the vehicle’s surroundings.
Each of these sensors provides important navigational data. However, they all describe a car’s location relative to its immediate environment. With no reliable source of absolute positioning, these relative measurements can’t confirm the vehicle’s exact place in the world — information that is critical for safe navigation.
Why ADAS Needs GNSS
Cameras, lidar and other sensors provide rich environmental data. However, they are limited by what they can directly observe. A camera can identify lane markings but can’t confirm which road the vehicle is on when multiple lanes or junctions overlap. Similarly, lidar can map obstacles in 3D, but without a wider frame of reference, it will struggle to anchor that map to the road network. HD maps provide another valuable layer, but without an accurate global position, they too can be misaligned with the real world, limiting their value.
GNSS can help plug this gap. By supplying absolute latitude and longitude, it ensures that the relative information from the other sensors is grounded in the correct location. GNSS helps calibrate and initialise other sensors, while also providing a cross-check against their measurements to detect potential errors or drift in sensor performance over time. Therefore, reliable GNSS is not an alternative to cameras, lidar or radar. It complements these sensors and boosts accuracy and the reliability of the overall system.
The Importance of Redundancy
Increasingly, the importance of GNSS in ADAS stacks is being recognised. As automotive production moves toward L3 automation and beyond, the demand for absolute positioning increases, along with the need for safe, layered sensing. GNSS, alongside cameras, lidar and radar, can help automakers improve navigational resilience without reinventing vehicular architectures.
Reliable GNSS isn’t about replacing other technologies. It is about reinforcing them. Having a global frame of reference helps ensure that the relative data from other sensors is grounded in the correct place. For automakers, the next step is recognising that GNSS can improve safety and trust in ADAS stacks, supporting the transition toward autonomous driving.
Advancing GNSS Reliability
Even with GNSS integrated into the vehicle’s sensors, challenges remain. Urban canyons and dense foliage can attenuate or even block satellite signals and create reflections, reducing accuracy. Since ADAS systems need reliably accurate absolute positioning, these challenges need to be addressed if we want GNSS to play a role in ADAS.
Newer, more sophisticated GNSS solutions are needed. The progression to Level 3 does not require an entirely new technology stack but rather extracting the very best from each of the existing components. For GNSS, this evolution involves implementing software-based solutions to achieve the necessary reliability improvements without overhauling hardware components. Pursuing cost-effective upgrades enhances performance without necessitating complete system redesigns, thereby keeping costs under control.
FocalPoint’s S-GNSS Auto software enhances GNSS accuracy in autonomous vehicles, providing reliable, absolute location to improve overall ADAS safety and efficiency. By boosting line-of-sight signals and rejecting non-line-of-sight signals, this simple firmware upgrade can help vehicles maintain accuracy in challenging environments.
By reducing positional uncertainty, these enhanced GNSS solutions strengthen the overall sensor stack. Together, these layers improve resilience, safety, and confidence in higher levels of vehicle automation.
As the automotive industry moves further towards L3 automation and beyond, reliable data on absolute position will be essential and will only reinforce the insights captured by cameras, lidar and other sensors.
Quectel Wireless Solutions, a global IoT solutions provider, launched three smart single board computers Tuesday designed to speed product development and reduce costs.
The QSM368Z, QSM560DR and QSM668SR offer developers connectivity, operating system and memory options for various applications, the company said.
“These boards are fully finished hardware that can be easily integrated inside customers’ larger systems across a wide range of IoT use cases,” said Raymond Wang, head of Smart SoC at Quectel Wireless Solutions. “Provided in a ready-to-use, single, low-cost platform, these boards are helping to simplify and accelerate the development process for IoT devices of all types, significantly reducing development time with rapid prototyping and cutting development costs.”
The QSM368Z features the Rockchip RK3568 IoT processor with a quad-core ARM Cortex-A55 CPU, ARM Mali G52 GPU, 8M ISP HDR and 1 TOPS NPU. The board supports Linux and Android operating systems.
The device includes triple-screen concurrent display support, 1,000 Mbps Ethernet and 4K video encoding. Built-in Wi-Fi 5 and Bluetooth 4.2 come standard, with optional support for Quectel LTE Cat 1, LTE Cat 4, Wi-Fi 6 and GNSS modules.
The QSM368Z measures 120mm x 100mm x 22.25mm, weighs about 90 g and operates in temperatures from -10 C to +75 C. Applications include IoT gateways, smart displays, industrial terminals, safety monitoring systems, NAS, NVR/DVR and automotive NVR solutions.
The QSM560DR features 12 TOPS NPU and supports Ubuntu, Android and Windows. The platform’s multi-mode 5G capability supports both NSA and SA networks, with 3G and 4G fallback. Wi-Fi 6E with DBS and 2×2 MU-MIMO technologies enable faster data transmission.
The device supports downlink speeds up to 2.5 Gbps on 5G NSA. It measures 120.5mm x 106mm x 22.5mm, weighs approximately 120 g and operates from -35 C to +75 C. Target markets include smart manufacturing, retail analytics, robotics and connected infrastructure.
The QSM668SR supports Android, Linux and Ubuntu and features 1.1 TOPS NPU. The board supports LTE Cat 4, Wi-Fi, Bluetooth and GNSS. Under LTE Cat 4, the board achieves uplink speeds up to 150 Mbps and downlink speeds up to 50 Mbps. Bluetooth 5.0 is included.
Optional GNSS functionality provides positioning through GPS, GLONASS, BDS, Galileo, QZSS and SBAS satellite constellations.
The device includes HDMI, camera inputs, Ethernet, UART, USB, I²C, RS232, RS485, CAN, SD and SIM interfaces. It measures 102mm x 100mm x 23mm, weighs approximately 97.7 grams and operates from -20 C to +75 C. Applications include IoT gateways, smart home systems, industrial control terminals, retail solutions, safety monitoring, vehicle equipment and logistics devices.
Quectel also provides antennas for cellular, Wi-Fi, Bluetooth and GNSS networks, plus custom antenna design and optimization services.
Trimble has provided advanced geospatial equipment to Fresno State’s Geomatics Engineering Program in collaboration with California Surveying & Drafting Supply, a Cansel company (CSDS). The equipment is designed to facilitate experiential learning in optical surveying, photogrammetry, GIS, GNSS and scanning workflows, helping to equip geomatics students with the skills needed for future careers. As part of this collaboration, Fresno State will open a Trimble Technology Lab on campus in 2026 as a place for students to get hands-on experience and training.
As the nation’s first four-year, nationally accredited geomatics program and California’s only Accreditation Board for Engineering and Technology-accredited four-year offering, Fresno State has long been a hub for training the geospatial professionals who power land surveying companies throughout the Western U.S., including entities like Caltrans and PG&E. CSDS, with its expertise in bridging academic needs with industry solutions, was instrumental in bringing Trimble on board to expand the program’s equipment inventory, foster innovation and ensure the program’s sustainability as a talent pipeline for California’s geospatial industry.
“This strategic alliance is key to revitalizing and aligning educational offerings with the cutting-edge tools that define the profession,” said Tom Cardenas, senior vice president at CSDS. “Beyond offering students a hands-on learning approach, this project establishes a scalable model for addressing the surveyor shortage through industry and education collaboration. It’s a clear commitment to reshaping the future of geospatial education in California.”
The Bureau of Labor Statistics reports a significant decline from 56,200 employed surveyors in the U.S. in 2010 to 47,770 in 2020. In California, where more than 2,000 surveyors depend on advanced technologies to support a booming construction and utility sector, the shortage poses a tangible threat to projects ranging from highway expansions to renewable energy installations.
“Fresno State is a critical pipeline for California’s geospatial workforce. The collaboration with CSDS and Trimble amplifies our collective mission to align educational offerings with the state-of-the-art tools that meet the demands of a rapidly evolving industry,” said Bryan Gibert, director of sales enablement at Trimble. “This collaboration is about creating an ecosystem that draws in talent and prepares them for immediate impact.”
The equipment includes Trimble GNSS base receivers, data collectors and network capabilities; Trimble S7 robotic total stations; Trimble DiNi digital levels; Trimble X9 3D laser scanners with T10x tablets; and licenses for Trimble Business Center, Trimble RealWorks and other highly technical software such as Trimble’s aerial photogrammetry module for TBC and Trimble eCognition. Trimble also outfitted Fresno State’s Geomatics Engineering program with several C5 mechanical total stations for a complete, turnkey solution. Both Trimble and CSDS provide configuration, calibration and on-site training for the technology.
“We emphasize hands-on training in our facility, complete with high-end computers, advanced distance learning tech and collaborative research projects with local agencies like CSDS,” said Scott Peterson, associate professor and program coordinator of the Geomatics Engineering Program at Fresno State. “While we had solid foundations from previous industry partnerships, we needed to expand with Trimble technologies to align our geomatics education with what the overwhelming majority of California professionals use every day. This turnkey solution, from GNSS to scanners and software, prepares our students for real-world challenges across geomatics and construction, leveraging our control network for practical training.”
My September GPS World newsletter highlighted the new California Spatial Reference Network, labeled CSRN Epoch 2025.00. These coordinate changes will impact geospatial users across California, and understanding the transition process is important for preparing for the modernized National Spatial Reference System (NSRS), expected to be adopted in 2026.
CSRC, founded in 1997 and formally dedicated in 2001, develops and maintains a modern network of GPS control stations to provide a reliable spatial reference system for California. Created as a partnership of surveyors, engineers, GIS professionals, the National Geodetic Survey (NGS), Caltrans, and the geodetic and geophysical communities, the CSRC’s mission is to produce a self-sustaining, up-to-date geodetic control network for the state.
The CSRC holds Coordinating Council meetings to review CSRC activities and related state surveying and mapping efforts. The box titled “CSRC Coordinating Council 2025 Fall Meeting” lists the agenda for the most recent meeting. I attend these meetings virtually; they are consistently informative and I enjoy participating.
Image: CSRS website
Dr. Yehuda Bock’s Director’s Report (SOPAC/CSRC Director, Dept. IGPP, Scripps Oceanography, UCSD) is available for download from the CSRC website: http://sopac-csrc.ucsd.edu/index.php/csrc-presentations/ (note: large file). At the Fall Coordinating Council Meeting Yehuda opened with a presentation on the new California Spatial Reference Network, CSRN Epoch 2025.00. I encourage readers to download the presentation or read my September GPS World newsletter, which highlighted CSRN Epoch 2025.00. This newsletter will focus on the Geodetic Program at Scripps Institution of Oceanography (SIO).
Image: CSRC website
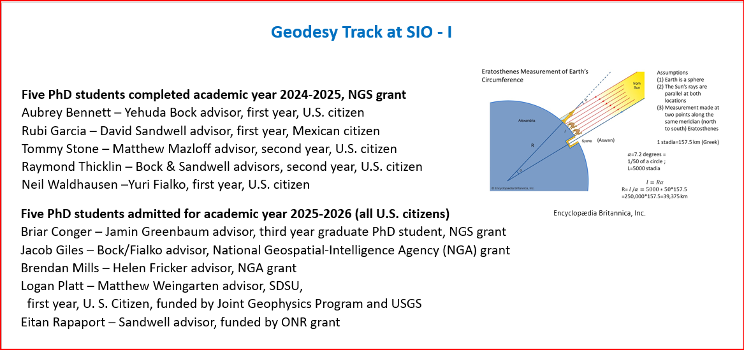
In my November 2023 GPS World newsletter, I noted NGS’s announcement of the NOAA FY23 Geospatial Modeling Competition awardees. In my March 2024 GPS World newsletter, I highlighted Scripps Institution of Oceanography’s (SIO) proposal. As noted there, Yehuda’s proposal included three activities:
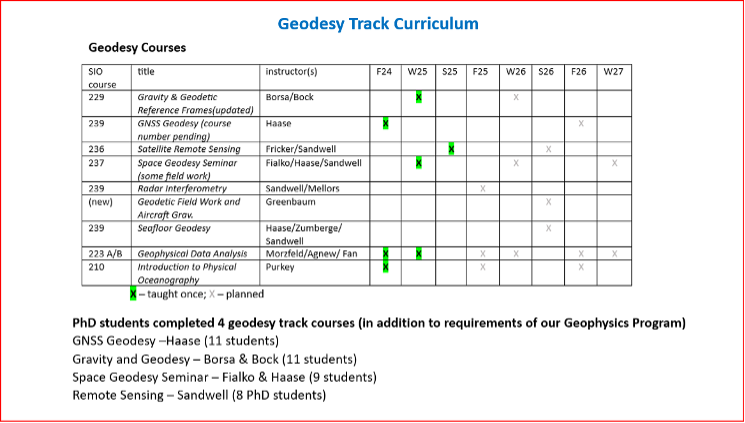
Create a formal Geodesy Program at SIO to address the nationwide deficiency of geodesists. Expand current geophysics curriculum – funding for five graduate students.
Develop an IFDM to supplement the NSRS for users in regions with significant ground motions, using GNSS and InSAR/GNSS displacement fields (funded by NASA projects) and underlying geophysical models. CSRC will exercise the IFDM through its community of public, private and academic users of precise spatial referencing in our challenging region of secular and transient crustal movements.
Investigate a unified vertical reference frame, including a marine geoid optimized to be consistent with the full spectrum of observations from modern gravimetric geoids (e.g., GRAV-D, ICGEM), remotely sensed observations (e.g., SWOT, ICESat-2), in situ ocean observations and assimilating ocean models and the TRF.
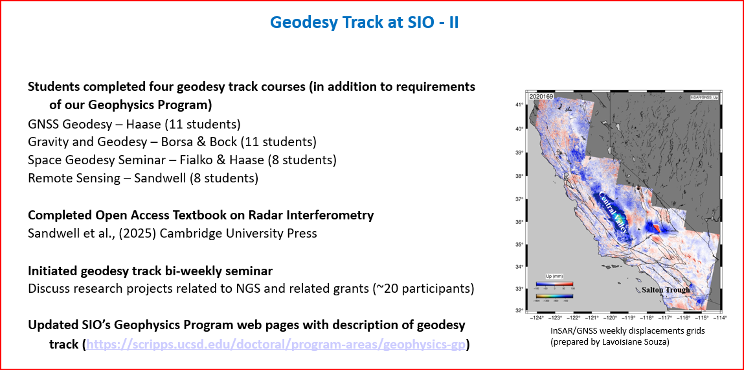
As mentioned in the Director’s report, they have initiated bi-weekly geodesy track seminars to discuss research projects related to NGS and other grants. Four videos by students discussing their projects were shown during Yehuda’s presentation.
The following are the titles and presenters of the four research projects:
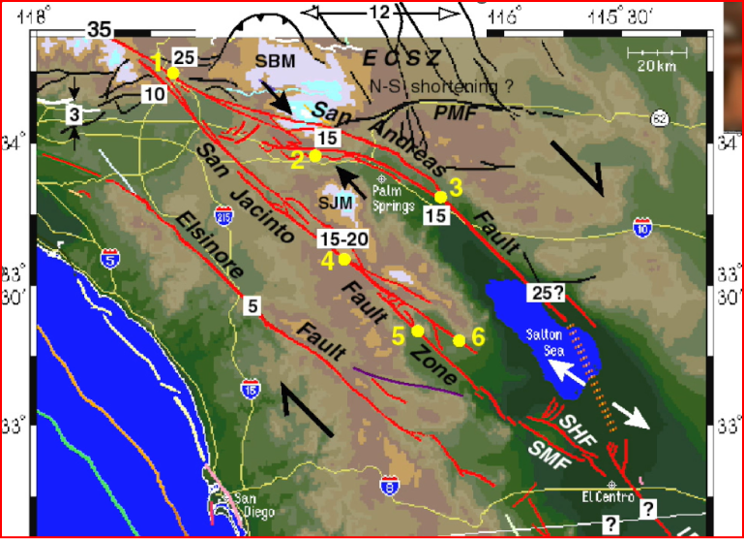
San Jacinto Fault Zone by Neil Waldhausen
Probing Antarctic basal ice state using airborne geodesy by Briar Conger
Repeat Pass Interferometry by Rubi Garcia Gonzalez
Hydrologic monitoring with GRACE/GRACE-FO by Logan Platt
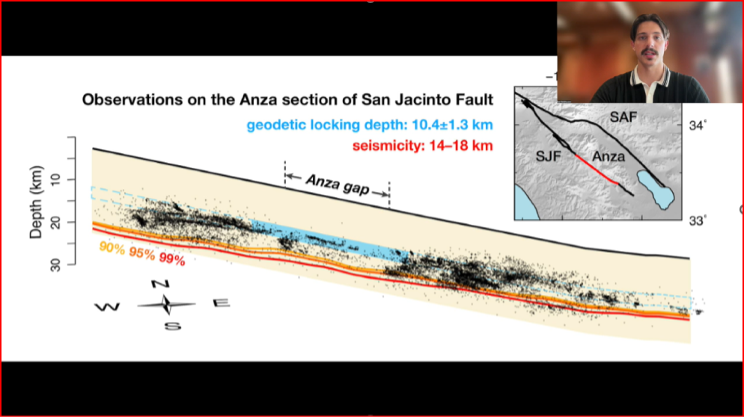
San Jacinto Fault Zone by Neil Waldhausen
I have included a few bullets summarizing their project and a few captured images from the videos. I would encourage everyone to download the presentation to listen to the short videos by these students. The presentations are only 90 seconds but are very interesting. Readers can contact the speakers through the University to find out more about their research.
Summary of the “San Jacinto Fault Zone” video:
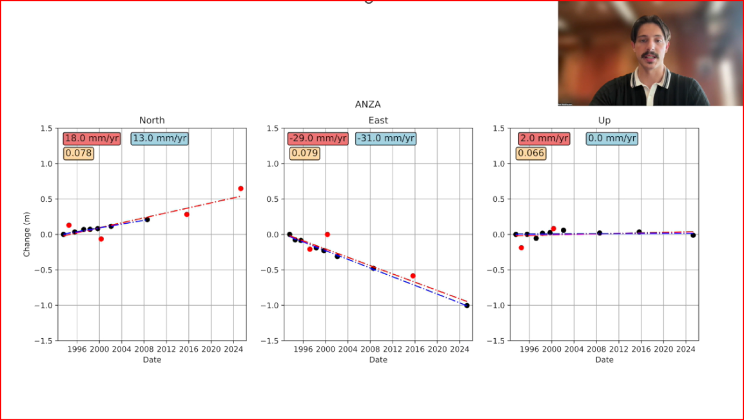
Neil uses GNSS to measure velocities and strain rates around the San Jacinto Fault.
He focused on the Anza gap, a 20-km segment of the fault.
He re-surveyed about 50 monuments that had been occupied over past decades.
His work has lowered uncertainties in many site velocity measurements.
His aim is to further reduce uncertainties in strain-rate and slip-rate estimates to better understand the Anza gap’s mechanics.
San Jacinto Fault Zone by Neil Waldhausen.San Jacinto Fault Zone by Neil Waldhausen.Image: CSRC website
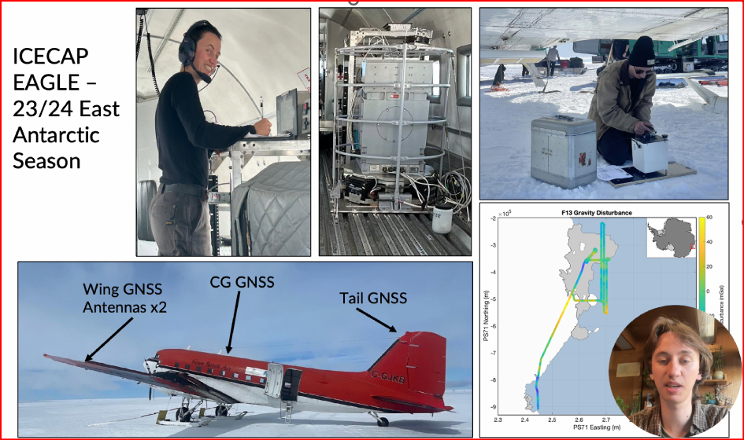
Summary of the “Probing Antarctic Basal Ice State Using Airborne Geodesy” video:
Briar’s project uses gravity and radar data to study basal hydrology — water flow beneath glaciers and ice sheets, including subglacial lakes, channels, and pressure-driven water movement.
He conducted fieldwork on the East Antarctic Ice Sheet during the 2023–24 season.
He collected airborne gravity and GNSS data from a converted DC-3 aircraft.
Data processing uses both PPP and differential positioning methods.
His aim is to improve long-term sea-level rise predictions.
He is also developing a fixed-wing UAV capable of collecting lidar, gravity, and photogrammetry data.
Probing Antarctic Basal Ice State Using Airborne Geodesy by Briar Conger
Probing Antarctic Basal Ice State Using Airborne Geodesy by Briar Conger.Image: CSRC website
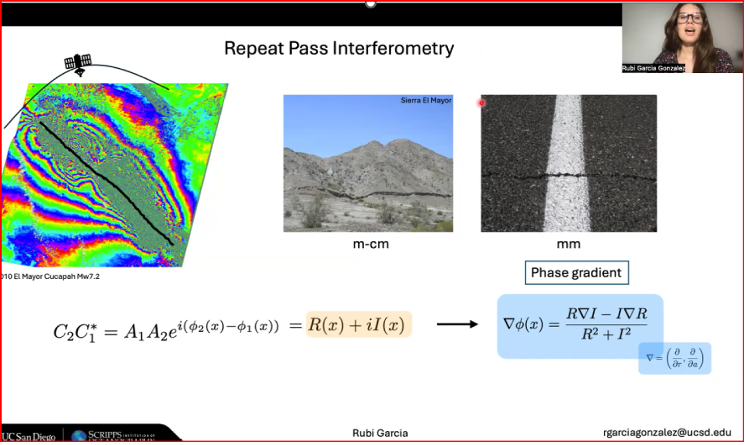
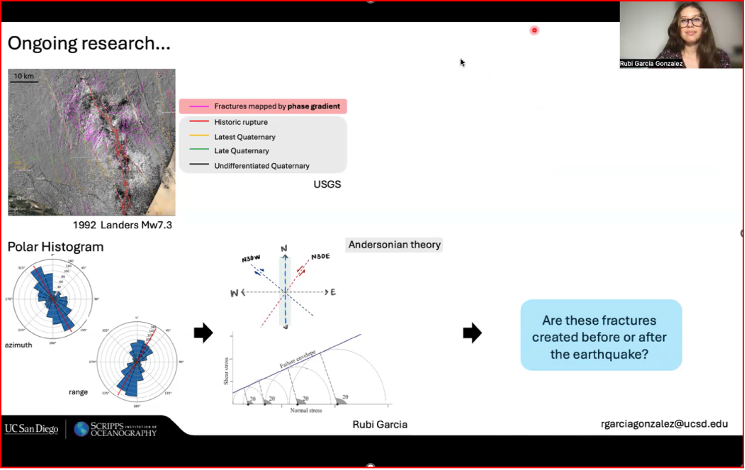
Summary of the “Repeat Pass Interferometry” video:
Rubi used repeat-pass interferometry (phase gradient) to map small-scale surface deformation.
The phase gradient is the change in interferometric phase between neighboring pixels; unlike the ambiguous single-pixel phase (wrapped within 2π), the gradient gives a continuous local rate of change useful for analysis.
She compared fractures identified by phase-gradient analyses with historic fracture databases.
Her ongoing work includes applying Andersonian faulting theory to assess whether fractures formed before or after earthquakes.
Andersonian faulting (Anderson’s theory of faulting) is a geological framework for interpreting crustal stress and fault geometry; it’s used to interpret InSAR-measured deformation. While not a method of analysis for InSAR data itself, it serves as a critical interpretive tool for understanding the ground deformation patterns measured by InSAR.
Repeat Pass Interferometry by Rubi Garcia Gonzalez
Repeat Pass Interferometry by Rubi Garcia Gonzalez.Image: CSRC website
Summary of the “Hydrologic monitoring with GRACE/GRACE-FO” video:
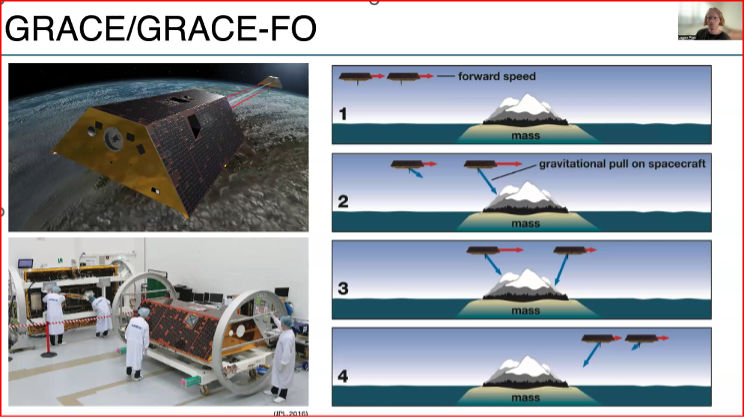
Logan described using satellite measurements of tiny changes in Earth’s gravity to track mass movement and better understand groundwater and the water cycle.
He relied on GRACE and GRACE-FO data.
The Gravity Recovery and Climate Experiment (GRACE) and its successor mission, GRACE-Follow On (GRACE-FO), are Earth-observation missions that use twin satellites to precisely map changes in Earth’s gravity field over time. This unique method allows scientists to track the movement of mass, primarily water, around the planet
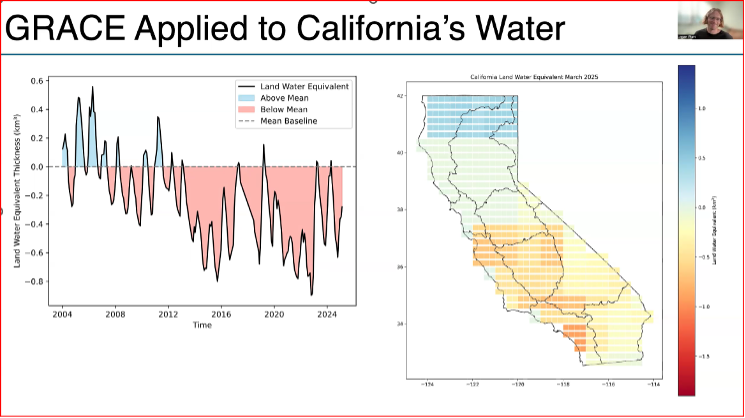
He used the GRACE data to look at changes in California’s Water storage from 2004 to 2024.
Results indicate a decline due to drought and heavy ground water usage, with more water being stored in northern California than southern California.
This research supports water management, climate-change impact assessment, and strategies for sustainable groundwater use.
Hydrologic Monitoring with GRACE/GRACE-FO by Logan Platt
Hydrologic Monitoring with GRACE/GRACE-FO by Logan Platt.Hydrologic Monitoring with GRACE/GRACE-FO by Logan Platt.Image: CSRC website
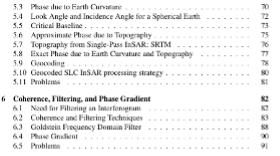
A new InSAR textbook, authored by several internationally recognized researchers, was also announced. Funded by the National Geodetic Survey and published Open Access, the book is available for free download. It’s a large file, but anyone working with InSAR data should obtain a copy.
New InSAR Textbook
Image: CSRC website
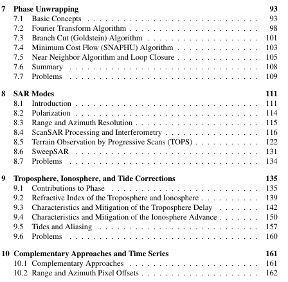
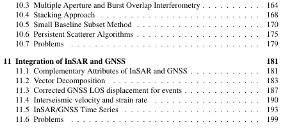
Table of Contents of New InSAR Textbook
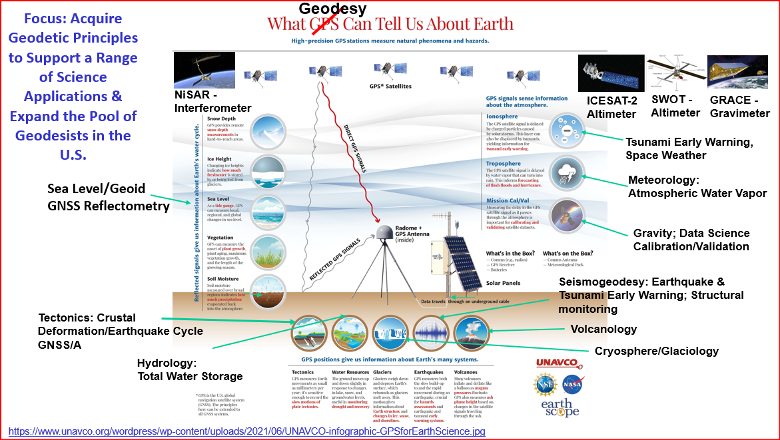
If you’ve read my newsletters, you know I’m passionate about advancing geodesy. I wanted to share one of Yehuda’s slides, “What Geodesy Can Tell Us About Earth,” because the four students are working on projects tied to real-world problems. The slide highlights geodesy’s importance and the many professions that rely on its findings.
What geodesy can tell us about Earth. (Image: CSRC website)
Accurate localization underpins modern mobility, powering everything from precise rideshare pickups and efficient deliveries to augmented reality and autonomous systems. Yet achieving reliable sub-meter precision with commodity hardware remains one of the field’s central challenges.
A range of technologies are being explored to improve positioning, such as real-time kinematic (RTK) and Precise Point Positioning (PPP) corrections, 5G methods standardized under the 3rd Generation Partnership Project (3GPP), simultaneous localization and mapping (SLAM), light detection and ranging (lidar), inertial measurement units (IMUs), and ultra-wideband (UWB). Each plays a role in specific contexts, but for everyday, mass-market deployment, two paradigms dominate the conversation: visual positioning systems (VPS), which rely on cameras and computer vision to match images against reference databases, and GNSS plus inertial measurement unit (GNSS+IMU) sensor fusion, which integrates satellite positioning with inertial data already present in billions of devices.
These two approaches are not mutually exclusive. VPS works best in dense urban areas where GNSS can struggle, while GNSS+IMU excels in the open environments where VPS has fewer features to recognize. In practice, VPS even depends on GNSS to help narrow the search space in its visual database. That makes the two technologies natural complements, and together they provide the building blocks for the next generation of spatial intelligence.
The Role of VPS
VPS use computer vision to determine position relative to known landmarks. In favorable environments – especially dense, feature-rich urban settings — they can deliver impressive accuracy. VPS has been successfully applied in AR anchoring, pedestrian navigation, and even some indoor mapping, offering a level of precision that is difficult to match with GNSS alone.
At the same time, VPS faces challenges that limit its ability to scale as a standalone universal solution. Maintaining vast libraries of reference imagery requires constant collection and refreshing, even for companies with resources such as Google’s Street View. Keeping cameras active and running neural network matching consumes power and compute, with AR and navigation apps often showing rapid battery drain when vision pipelines are engaged.
Performance can also be fragile, with accuracy dropping in low light, bad weather, or environments with limited features such as open fields or glass-heavy corridors where reflections distort recognition. Because VPS requires continuous camera use, it also raises privacy concerns under regulations like GDPR.
But VPS still fills an important feature set: it works best in exactly the environments where GNSS struggles most. In dense urban areas with abundant visual features but heavy multi-path interference, VPS provides a complementary capability that enhances overall localization performance when paired with GNSS+IMU.
GNSS+IMU Fusion
GNSS provides global reach, but smartphone accuracy typically ranges from 3m to 5 m. This may be adequate for turn-by-turn navigation, but it does not meet the precision required for lane-level guidance, pedestrian navigation or building entrances. Pairing GNSS with IMU data changes that equation by adding orientation and motion context.
Sensor fusion combines GNSS position (x, y, z) with IMU-derived orientation (α, β, γ) to deliver six degrees of freedom (6DoF). In practice, this allows devices to determine not only where they are, but also which way they are facing, which is critical for navigation and AR anchoring.
Another key advantage is that fusion also runs efficiently on-device, using low-power sensors already embedded in nearly every phone. It avoids the battery drain and compute overhead of vision-based methods, remains resilient in poor visibility, and largely sidesteps the privacy concerns associated with continuous camera use.
Together, GNSS+IMU and VPS offer complementary strengths: GNSS+IMU provides scalable global coverage, while VPS adds value in dense urban or visually rich environments. Used in tandem, they extend reliable sub-meter localization across a far wider range of real-world scenarios.
Performance in Field Tests
Independent field testing has underscored the impact of GNSS+IMU fusion in real-world conditions. In trials conducted in Louisville, Colorado, standard smartphones relying solely on GNSS averaged ~1.9 meters of error. When collaborative corrections and IMU fusion were added, mean error dropped to ~0.55 meters – a more than threefold improvement.
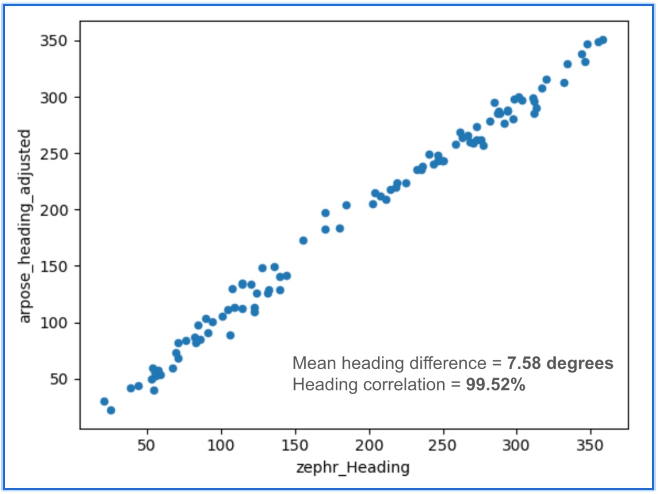
To benchmark localization performance against visual methods, we compared heading determination from Zephr’s sensor-based approach with Google’s VPS, widely considered an industry leader in vision-based localization. Using the same device and location, headings generated from ArPose and Zephr were plotted against VPS outputs.
Figure 1: The figure shows a strong correlation, with a mean heading difference of just 7.58° and a heading correlation of 99.52%.
The results in Figure 1 show a strong correlation, with a mean heading difference of just 7.58 degrees and a heading correlation of 99.52%. This provides a useful benchmark, illustrating that sensor-based approaches can achieve heading accuracy on par with vision-based systems while avoiding the data, compute, and privacy burdens tied to continuous camera use.
Head-to-Head Comparison
When considered side by side, VPS and GNSS+IMU reveal distinct strengths. VPS delivers high accuracy in dense urban environments, where GNSS can be degraded by multipath or blockage. GNSS+IMU, meanwhile, provides consistent global coverage and efficient performance in open environments where VPS has fewer features to recognize. Taken together, they form a complementary toolset, with each addressing the other’s gaps.
Cost & Infrastructure: VPS offers detailed visual positioning but requires continuous investment in capturing and updating reference imagery, which can run into petabytes of data and demand large-scale cloud storage. GNSS+IMU leverages existing satellite constellations and commodity sensors already embedded in smartphones, scaling naturally without additional infrastructure.
Battery & Compute: VPS enables precise landmark recognition but must keep cameras active and process high-resolution frames, a pipeline that consumes energy and compute. GNSS+IMU fuses lightweight sensor readings on-device, sustaining real-time performance with minimal power. Hybrid systems can use VPS selectively for visual anchors when power budgets allow.
Environmental Robustness: VPS excels in dense urban cores where landmarks are abundant, but its performance can degrade in low light, heavy weather, or feature-poor settings such as highways or open fields. GNSS+IMU continues to perform in most outdoor environments, with IMUs bridging short GNSS gaps in tunnels or urban canyons. Together, they extend reliable coverage across diverse conditions.
Privacy: VPS provides visual context but depends on continuous camera feeds, which can raise concerns under regulations like GDPR and CCPA. GNSS+IMU relies solely on inertial and satellite data, which can be anonymized and processed on-device. Privacy-conscious applications may favor GNSS+IMU as the default, while invoking VPS in controlled contexts.
Scalability: VPS delivers strong results in mapped geographies but is constrained by the cost of collecting and maintaining visual data globally. GNSS+IMU scales as more devices ship with standard GNSS receivers and inertial sensors, with accuracy improving further when devices contribute corrections to a shared network. In combination, VPS can add value in high-density urban corridors where visual richness offsets its infrastructure demands.
Beyond Accuracy: Spatial Intelligence Without Cameras
GNSS+IMU fusion not only narrows positioning error but also provides contextual awareness. By combining positional vectors with device orientation, systems can determine not just where a device is, but what lies within its field of view.
This contextual layer enables landmark-aware navigation and natural AI interactions. Instead of vague coordinates, users could be guided to “meet at the blue mailbox next to the coffee shop entrance.” In AR, digital content can be anchored to the physical world without the overhead of vision-based methods. And for AI interfaces, assistants could answer spatial queries (“Is the restaurant to my right or left?”) with precision that feels intuitive.
While GNSS+IMU avoids reliance on cameras, VPS can still add complementary value by providing visual anchors in feature-rich spaces. Used together, the two methods create a more resilient and adaptive localization system, able to support a wider range of real-world scenarios than either could alone.
A Clearer Path Forward
VPS has proven valuable in research, robotics, and AR demonstrations, particularly in dense urban environments. But its reliance on imagery, heavy compute, and continuous camera use makes it difficult to scale as a universal solution for sub-meter accuracy.
To unlock the next generation of spatially intelligent applications, from context-aware assistants to immersive AR, localization must be both practical and massively scalable. This foundation will come from GNSS+IMU sensor fusion, complemented by vision-based methods where they add value. GNSS+IMU builds on infrastructure and sensors already present in billions of devices, delivers efficient on-device performance, and avoids the privacy tradeoffs of camera-based systems.
As positioning becomes the backbone of spatial AI, the evidence points to a decisive outcome: the future will be multimodal, but the scalable backbone will be GNSS+IMU fusion since it empowers devices to understand and interact with the world reliably, with or without cameras.
Trimble has launched its data collector portfolio. The suite includes the Trimble TSC710 data collector, the Trimble TSC510 controller and the Trimble T110 tablet, built for advanced functionality and integration across field operations.
When used with Trimble Connect, a common data environment and collaboration platform, or Trimble WorksManager civil site management cloud software, users can exchange data between the office and jobsite in near real-time to improve operations.
As the physical interface between Trimble hardware and software, the data collectors translate the physical world into an accurate digital representation and back. They enable connected workflows through Trimble Connect and Trimble WorksManager, giving users real-time access to a single source of truth for all project data. Combined with Trimble field software, users can unlock productivity and efficiency gains with quality control capabilities that help reduce project errors and downtime.
The devices are part of an integrated technology ecosystem of Trimble hardware and software, enabling a single source of truth for all project data. The approach enhances collaboration for professionals in surveying and mapping, construction, utilities, mining, oil and gas and public safety and forensics.
“Trimble is dedicated to pushing the boundaries of what’s possible in the field,” said Boris Skopljak, vice president of geospatial at Trimble. “This new data collector portfolio empowers our customers with the tools they need to be productive and stay connected in any environment.”
The portfolio includes:
Trimble TSC710 data collector — Ideal for working with large model data files on a construction site, the TSC710 features a 7-inch touchscreen, a full keyboard and a Qualcomm processor that is faster and uses less battery power than the TSC7. The TSC710 runs on a Google Mobile Services-certified Android 14 operating system. Built for maximizing productivity around connected workflows, the TSC710 is equipped with 5G WWAN support and all-day battery life. The TSC710 has a narrowed neck and is 150 grams lighter than its predecessor.
Trimble TSC510 controller — Engineered to boost field efficiency and optimize workflows, the TSC510 is a robust handheld device with an IP68 rating, compared with IP65 for the TSC5, that enables continuous operation with an all-day battery and a Qualcomm processor up to three times faster than the TSC5, with twice the memory and storage. The TSC510 features a 5-inch screen and runs Android 14. With updated WWAN and Bluetooth modules, teams stay connected for smooth data exchange and real-time project updates.
Trimble T110 tablet — The T110 maximizes field productivity with an Intel 14th-generation Core Ultra 7 processor, built to handle demanding projects and large datasets, including point clouds and imagery. Its rugged design ensures reliable performance in demanding environments. The T110 combines features of the Trimble T10x and Trimble T100 into a single field tablet, including a powerful processor, swappable batteries, 4G LTE WWAN and a Trimble Empower bay enabling communication with Trimble field devices.
Availability
The Trimble data collector portfolio is available now through Trimble’s global network of dealers.
Safran Electronics & Defense had unveiled Skydel NAVWAR, a software solution designed to protect against hostile UAVs by disrupting their navigation systems.
As the core of Safran’s counter-UAV (C-UAV) systems, Skydel NAVWAR disrupts UAV navigation by simulating authentic GNSS signals, providing nations and organizations with advanced protection for their most critical assets.
Skydel NAVWAR can be deployed on tactical platforms and integrated with sensors and command-and-control systems, allowing operators to conduct remote spoofing operations without being physically present at the target location.
“Protecting national sovereignty requires more than just technology — it demands trusted systems that empower countries to take control of their own security,” said Maxime Gorlier, director of positioning, navigation and timing at Safran Electronics & Defense. “With Skydel NAVWAR, we are giving our partners the capability to safeguard their airspace, defend critical infrastructure and ensure resilience in the face of evolving threats.”
The system features a secure application programming interface, hardened operating system and field-tested durability designed for demanding operational conditions. It supports all major global navigation satellite systems, including GPS, Galileo, GLONASS, BeiDou, NavIC, QZSS and space-based augmentation systems, as well as emerging low-Earth orbit (LEO) signals.
The software can simulate thousands of satellites in real time using commercial off-the-shelf hardware and operates at a 1,000 Hz iteration rate.
Safran designed the system to enable defense integrators to build sovereign anti-drone capabilities, enhancing national autonomy in countering UAV threats.
Septentrio, part of Hexagon, launched a miniaturized timing module designed to bring nanosecond-precision timing to high-volume applications requiring strict size and weight (SWaP) constraints.
The mosaic-G5 T measures 23 mm x 16 mm and weighs 2.2 g, making it suitable for data centers, telecommunications networks, satellite communications, financial institutions and other critical infrastructure requiring precise time synchronization.
The module receives signals from multiple GNSS satellite constellations and includes anti-jamming and anti-spoofing technology to maintain service continuity. It features built-in cybersecurity capabilities and dual pulse-per-second outputs for high-resolution timing.
“For over 25 years, we have been producing world-recognized timing receivers, serving critical applications and major industry players,” said Yasmine Hunter, product manager at Septentrio. “With our next-generation technology, we are now bringing precise and resilient time in an ultra-compact form factor to high-volume applications.”
The receiver operates across multiple frequencies, enabling high precision even in areas with radio interference. It supports clock and frequency input for synchronization and is ready to support Galileo High Accuracy Service. The module remains compatible with other correction services that enhance timing accuracy.
Position, navigation and timing (PNT) services, derived primarily from GNSS constellations, have become a critical element underpinning the global economy, with a vast range of sectors depending on these signals.
This includes coordinating financial transactions, stabilizing power grids as well as navigation, with supply chains set to become more reliant on the technology as autonomous vehicles become prevalent. However, GNSS is a vulnerable technology, with faint signals from medium-Earth orbit (MEO) satellites being susceptible to disruption.
In this article we’ll look at how both static and dynamic applications can achieve resilient PNT, with strategies and sensor fusion techniques that allow operational capability when GNSS is denied.
Seven hundred. That’s the number of GPS interference events such as jamming and spoofing that take place every single day, according to the U.S. government. And this number is increasing across North America and Western Europe, with it being especially prevalent in or near war zones.
Indeed, in August, the navigation system of a plane carrying the EU President, Ursula von de Leyen, was reportedly targeted by a GPS jamming attack as it was due to land in Bulgaria — forcing pilots to rely on paper maps. And GPS interference has been linked to the crash of Azerbaijan Airlines flight J2-8243, which was shot down on Christmas Day, 2024.
Relying on a single source for PNT is no longer a viable strategy and developing a resilient PNT ecosystem that can function in D3SOE (denied, degraded, and disrupted space operational environments) has become essential.
While navigation is the most commonly understood application of PNT, the timing component is critical in so many of the static systems we rely on — not just finance and power (as listed above) but for AI data centers, asset tracking systems and communication networks — which require precise and stable time references to ensure data integrity, and need these to be synchronized across global networks.
For such systems, the consequences of getting timing off by even the smallest amount can be seen in the 2016 decommissioning of the SVN23 GPS satellite. During this, a software error created a 13.7 microsecond anomaly across the entire constellation that, according to a UK government report caused issues with digital radio broadcasts and communication networks. The event is also seen by some as a warning for the financial sector and in particular for high-frequency trading (HFT), where trades take place in millionths and studies have suggested that a 1 ms advantage in trading applications could be worth $100 million a year to a major brokerage firm.
By subtly altering timing signals used by trading systems, malicious actors can effectively see and use market data “from the future” and enact transfers worth billions of dollars.
Similarly, a timing attack on the phasor measurement units (PMUs) used to measure real-time stress in power grids could trigger major blackouts. The effect of such an attack can be seen in 2003’s (pre-PMU) Northeast Blackout, in which a sagging power line touched tree and caused a series of cascading outages that affected 55 million people across the U.S. and Canada.
And further putting the importance of protecting PNT in context, in 2020 the U.S. defined 16 critical infrastructure sectors as part of its Executive Order 13905. Of these 14 (88%) of these are reliant on PNT for their safe operation. Going beyond the energy and finance examples above, this includes sectors like communications, transportation, and agriculture. In short, PNT resilience is essential across virtually the entire economy.
Detecting a Compromised GNSS Signal
Of course, the first stage in protecting a PNT signal is in the identification of an attack, and several techniques can be used to identify inconsistencies that point to jamming or spoofing.
These range from the analysis of the signal’s Doppler shift (transmissions from nearby terrestrial spoofer will have a near-zero Doppler shift) to techniques like RAIM (receiver autonomous integrity monitoring), which continually recalculates position while excluding one satellite each time to see if the results are consistent.
Cryptographic methods, such as Galileo’s Open Service Navigation Message Authentication (OSNMA), are also available to verify a satellite’s digital signature and confirm the data’s authenticity.
However, relying on cryptographic authentication alone still comes with risks. Notably, authenticated signals are susceptible to meaconing attacks, where a legitimate signal is recorded and replayed later to mislead a receiver. It is, however, possible to counter these attacks using a secure, out-of-band verification layer for all GNSS constellations. This involves the independent delivery of authentication data with hash authentication transmitted via encrypted L-band correction signals from geostationary (GEO) satellites.
This approach can also be retrofitted to older equipment using PNT by using an RSR transcoding device (see below).
For dynamic systems, an additional level of validation can be gained by inertial sensors, comparing their output against PNT data to detect both sudden large jumps in position and continual slight deviations that can be characteristic of a sophisticated spoofing attack.
Timing in Static Applications
The timing architecture of such systems must go beyond simply identifying a threat and validate incoming data. This requires the integration of alternative PNT sources through an intelligent sensor fusion framework. To achieve this level of resilience in a fixed location, a multi-source, zero-trust approach is necessary. This involves augmenting or replacing GNSS with a layered defense of terrestrial and alternative space-based signals that can be authenticated and trusted.
Modern PTP grandmasters utilize the latest sub-microsecond accuracy Precision Time Protocol (PTP) and the more common millisecond-range Network Time Protocol (NTP) to ensure compatibility with nearly all standard IT equipment.
High-speed 25G PTP Ethernet connections are also being implemented to support high-performance AI data centers and financial exchanges without creating data bottlenecks. To ensure continuous operation during extended GNSS outages, these systems can draw synchronization from terrestrial sources like a network PTP feed or an optional atomic caesium clock.
Furthermore, it is also possible to use encrypted L-Band signals from geostationary (GEO) satellites, such as those from Inmarsat, which create an enhanced timing service with built-in GNSS authentication and anti-spoofing features to deliver timing accuracy of sub-5 ns.
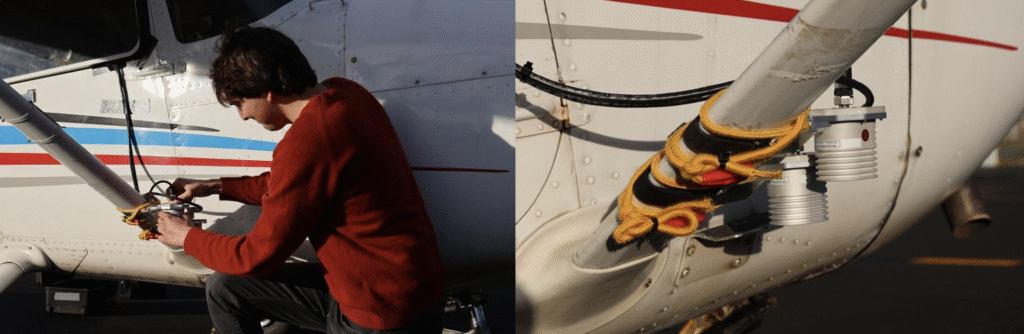
Figure 1: VIAVI’s Inertial Labs division has developed a Visual-Inertial Navigation System (VINS) that combines 3D vision aided mapping with inertial accelerometers to enable positioning in D3SOE environments — shown in prototyping stage.
Navigation Without a North Star
While static applications can utilize fixed terrestrial infrastructure for backup, dynamic systems do not have this luxury.
The inherent weakness of RF signals makes them easy to overpower through deliberate jamming by hostile actors. As such, navigation systems onboard UAVs and autonomous vehicles, as well as manned commercial and military vehicles require self-contained navigation capabilities that can function reliably when GNSS signals are compromised. This has driven significant advances in inertial navigation.
Sensors like accelerometers and gyroscopes have become a critical source for orientation and direction data that remains available at all times. The development of micro-electromechanical systems (MEMS) has been crucial, enabling the integration of inertial navigation into even the smallest systems.
These sensors aren’t an alternative to PNT satellites. By their very nature they will accumulate errors over time, with sensor bias causing drift and random-walk deviations allowing random noise in each measurement to accumulate. However, recent years have seen significant gains in their accuracy, allowing navigation to continue for short periods after GNSS data is compromised.
Combining these inertial sensors with sensor fusion techniques also allows each element in a multi sensor system (using magnetometer; and accelerometers/ gyroscopes for roll, pitch and yaw…) to be continually verified by the others for further improvements in accuracy, reducing overall level of error. Data from these IMUs can also be fused with signals from alternative satellite constellations like those in LEO.
LEO satellite signals are less accurate for timing than GNSS (around 80 ns vs. sub-15 ns) but are significantly stronger. For example, the Iridium LEO STL signal is c.1,000 times stronger than GNSS, making these signals both more resistant to jamming and harder to undertake a (successful) denial of service.
More recently, techniques using downward-facing camera to track fixed identifiable landmarks have been developed as an alternative / additional data validation method for dynamic systems.
These external sources provide absolute reference points that can be used to correct the inertial system’s calculations, dramatically improving accuracy and enabling reliable navigation for much longer periods.
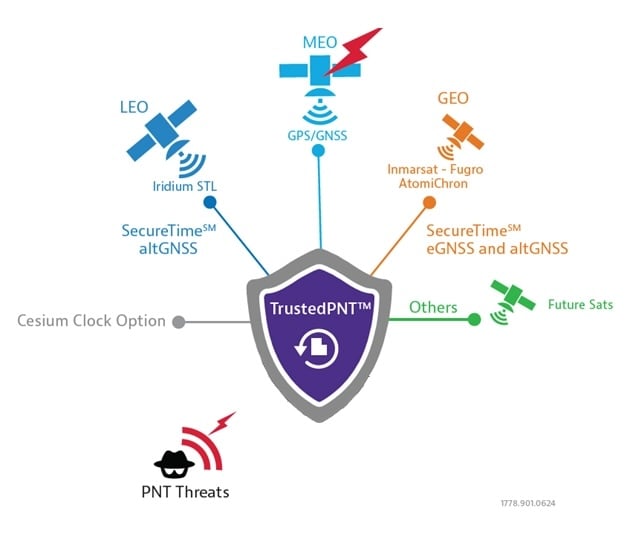
Figure 2: VIAVI’s SecureTime uses GEO and LEO constellations to provide positioning and timing signals that are resilient to attacks.
Sensor Fusion Gives Resilience
The limitations of individual PNT sources — whether the vulnerability of GNSS or the inherent drift of inertial sensors — mean they cannot depend on a single technology. The most effective strategy is often a hybrid one, combining a high-accuracy inertial sensor unit with inputs from other sensors.
As we touched on above, adding data sources improves the ability to detect and counter PNT attacks. For example, the EU has confirmed it will deploy additional LEO satellites to bolster its ability to detect GPS interference. And vision cameras can also be used as part of a Visual-Aided Inertial Navigation System (VINS), which provides a powerful method for maintaining an accurate position in the complete absence of GNSS signals.
This technique was developed in 2025 by VIAVI’s Inertial Labs division, with VINS combining processing with multiple inertial sensors to maintain position. This is reinforced with, and calibrated by a 3D vision-based positioning algorithm that compares visual patterns captured by an onboard camera (either daylight or infrared) with pre-loaded, satellite-imagery-derived 3D maps to track against known landmarks. In a GNSS-denied environment, a VINS system can maintain a horizontal position within 35 m, a vertical position within 5 m, and a desired velocity within 0.9 m/s.
Conclusion: Bridging the Legacy Gap
While modern systems can be designed from the ground up with a multi-layered, sensor-fusion PNT architecture, there is still the problem of the huge number of legacy systems that are very much prone to attack.
These legacy PNT systems are still widely used, including in military conflicts where D3SOE attacks are prevalent. To address this vulnerability, resilient signal retransmission technology has been developed to cost-effectively upgrade these older systems. This approach uses RSR transcoders (constellation simulators) to take a trusted PNT signal, derived from multiple assured inputs, and convert it into the standard GPS format that legacy equipment is designed to receive. This set up – in which the GNSS aerial is replaced with the input from the RSR transcoder – allows the existing systems to operate with state-of-the-art resilience without requiring replacement.
But, as we’ve seen in the above, a single, invulnerable replacement for GPS is simply not possible, so integrating multiple trusted sources is therefore essential. The path to assured PNT relies on a multi-layered ecosystem of diverse signals and sensors and applying this approach to both modern designs and legacy-system upgrades ensures all assets can maintain uninterrupted PNT access.
Artec 3D, a global 3D scanning lprovider, introduced its latest data capture and processing software, Artec Studio 20.
The all-in-one platform for 3D scanning, photogrammetry, reverse engineering and quality inspection now includes workflows that enable faster, fully automated data processing pipelines for digitization, design iteration and bulk product analysis.
The update includes enhancements across Artec’s scanner range. The Artec Spider II now features Live Scan Decimation, which produces high-detail, lightweight models for rapid prototyping and 3D modeling. The Artec Micro II adds support for HD Mode and 3-axis scanning, achieving higher resolution and more complete scans of small objects.
Refined masking in AI Photogrammetry produces ultra-realistic, artifact-free 3D models requiring minimal editing for computer-generated imagery, visual effects, forensics and other applications.
“Our last release turned Artec Studio into a complete package, with practically anything a user could need to capture a 3D model,” said Art Yukhin, CEO of Artec 3D. “Artec Studio 20 raises the bar in every way possible.”
Workflow automation
Users can customize workflows to their specific needs by queuing algorithms and processing captured data into 3D models with one click. The automation makes data processing up to 70% faster while allowing users to complete other tasks simultaneously.
Parameters can be adapted to different datasets within Artec Studio, but settings no longer need reconfiguration each time. Annual subscription holders can use scripting to set up workflows that import, process and export data to third-party software, enabling batch processing and fully autonomous file transfer.
Scanner upgrades
Artec Spider II now offers Real-time Fusion, previously exclusive to Artec Leo, which provides detailed live previews for reliable data capture. The newly integrated Autopilot streamlines the scanning process, particularly for new users. Improved reconstruction delivers more complete datasets for realistic, watertight models used in heritage preservation, education and medical applications.
The Artec Micro II desktop scanner now includes HD Mode, capturing four times more data points per scan. Three-axis integration provides greater surface coverage, allowing the scanner to capture complex, obscured areas and recreate complete objects.
The Artec Point industrial laser scanner features better visualization for twice-faster data capture. The wireless Artec Leo and long-range Artec Ray II benefit from a redesigned Fusion setting and workflow automation. Ray II users can now access Street View and panoramas through the updated app.
AI-powered photogrammetry
Refined masking in Artec Studio 20 produces realistic, artifact-free 3D models, while masking for texturing prevents objects from blurring with backgrounds.
Multi-camera support accelerates photogrammetry data capture and opens the software to various hardware combinations, including drones, smartphones, handycams and DSLR cameras. Sharp image prioritization ensures only the best frames from uploaded photos or videos are selected. GPU Memory Optimization customizes settings to individual hardware for peak efficiency.
Enhanced integration
New integration features make Artec Studio 20 more effective across applications. A new interface simplifies access to ZEISS Inspect advanced analysis tools and allows for scripting automation. Enhanced USD file support improves functionality for CGI and visual effects users. RCP file support adds compatibility with building information modeling platforms like Autodesk Revit.
Distance and intensity export filters optimize data for downstream processing. The software includes UI improvements with enhanced tools and scanning panels for more intuitive navigation and control.
Real-time situational awareness (RSTA) is crucial in numerous fields, particularly in public safety, transportation and emergency management. It enables decision-makers and first responders to quickly assess situations, select appropriate actions and implement plans effectively, ensuring timely assistance and resource allocation.
RTSA is a process of continuously monitoring and analyzing information to understand what is happening in a given environment. Virtually every owner or operator has a need for this, although the data that may be relevant varies.
RTSA refers to the ability to understand your environment and act appropriately. This will enable response to events as they unfold, using integrated data from various sources to enhance decision-making and operational efficiency. [1]
While real-time situational awareness is desired by various entities, it should be noted that it does not come from a single data point, as a single data point is not sufficient. There need to be locational, temporal and informational elements present to draw reasonable conclusions. One promising tool enabling this improved decision-making is the geographic information system.
Real-Time Geographic Information System
GIS is a technology that connects data to a map, integrating location and descriptive information. GIS helps users understand patterns, relationships and locational context, and supports decision-making in various industries.
A real-time GIS can create situational awareness because of its ability to simultaneously ingest, integrate, analyze and display streaming data from most any sensor, device and social media. GIS and location-based analytics can automatically refine and focus real-time data to accomplish the mission with up-to-the-minute intelligence on what’s happening in the field and across agencies and governmental jurisdictions. That’s why police, fire and emergency management organizations at all levels of government use real-time GIS capabilities in their operations and dispatching centers.
Building Robust New Layers is Key
As the duration — or reach and impact — of an emergency event increases, so does the number of agencies involved in responding to and mitigating that event. This requires communication systems to scale accordingly, ensuring seamless information exchange and communication among those agencies.
A significant obstacle to this essential communication is the lack of interoperability, with data interoperability playing a critical role. Data interoperability is the ability of different systems, devices or organizations to share digital information so they can communicate and work together effectively. Without this interoperability, organizations face delays in decision-making, reduced response efficiencies and challenges in coordinating incident management.
The Cybersecurity and Infrastructure Security Agency published the Information Sharing Framework as an approach to address the data interoperability challenge. It puts forward a three-layer framework that presumes:
a data layer, which resides with an individual agency in its nonsharable silo;
a presentation layer, which is the end user who needs to see the data in context for real-time situational awareness and decision-making;
and sandwiched in between is an integration layer, which does the necessary translation between the data and presentation layers in which the data is discovered, accessed, exchanged, analyzed and transported to the end user. [2]
For RTSA, the system must be able to access the relevant information in the data layer, to transform and standardize that data such that it can be augmented with other data to create actionable information that can be pushed or pulled into the presentation layer to inform the end user. This information will answer myriad questions about the situation such as when, where, who and what.
Radio Frequency Real-Time Situational Awareness
In today’s world of autonomous vehicles and swarms of drones, the electromagnetic spectrum is becoming a critical part of situational awareness. Both in knowing what spectrum is available for use and what spectrum needs to be defended or excluded due to willful interference.
Even in the context of space, RF spectrum data can help monitor satellite communications and detect anomalies, providing a more comprehensive understanding of the space environment and its potential threats.
The RF spectrum frequencies range from 3 kilohertz to 3 THz (which spans 3 KHz up to 3 billion KHz). Radio waves, part of the RF spectrum, are regulated by national laws and coordinated by the International Telecommunication Union to prevent interference between different users.
Radio frequency real-time situational awareness involves the use of radio frequency data and sensors to monitor, analyze and understand this environment. It is crucial for operational planning where the electromagnetic spectrum is a critical domain.
Its ability to provide real-time awareness of radio frequencies is critical to building an actionable picture of what are very dynamic environments. For example, recognizing the critical nature of an incident as it escalates from a local situation to a regional one.
Under the Hood
Effective spectrum monitoring devices rely upon modern developments in software-defined radio (SDR) technology that facilitate rapid reconfiguration and adaptation for various tasks. These include significant enhancements not only to computing capabilities but to the neural processing unit capacity as well. In part, to facilitate RF bandwidth pattern of life technical capability including time frame to gain specific insights.
Various capabilities are also expected to emerge in the coming years associated with situational awareness that may have a significant impact on the effectiveness, safety and health of especially the first responder community. The internet of things, cameras, data from other applications and networks, and sensors continue to produce increasing amounts of data. Artificial intelligence and data analytics are envisioned to be increasingly important mechanisms to assist in enabling timely and more informed decisions.
Multipurpose Remote Sensors
RF devices used for assured positioning, navigation and timing(A-PNT) most naturally are able to provide RF mapping for situational awareness. The same RF spectrum mapping that gives operators the tools to see real and potential frequency interference and usage. Just as GIS helps provide real-time situational awareness in the physical world, spectrum mapping provides RF real-time situational awareness in the virtual world. Different data, different tools, but the same need and general approach.
Such multipurpose devices could further contribute to helping build RF situational awareness to include information about emitter identification and locations core to RF mapping. Or RF-based sensors could be able to use signals such as those used by tactical radios, once their location is established.
This fulfills the vision that these RF devices, for example, could be positioned to support RF multiple aspects of situational awareness when not performing their primary mission.
This requires RF real-time situational awareness to be integrated into operational frameworks to allow for better decision-making, improved safety and enhanced capabilities in both military and civilian applications. By leveraging RF data in multiple ways, organizations can fill gaps in traditional monitoring techniques, leading to a more robust understanding of the operational landscape. RF real-time situational awareness is a critical capability that enhances operational effectiveness using advanced sensing technologies and data analysis, particularly in complex environments.
Poised for a New Generation
A key element for the aforementioned presentation layer is to provide the same data to many, although specific locations, referred to as narrowcasting (think narrow multicasting). A new company, EdgeBeam Wireless, is building a next generation broadcast system to provide these services largely referred to as datacasting. Powered by the broadcast industry’s latest ATSC 3.0 standard, this new service will make its datacasting compatible with standard IP networks, fiber networks and mobile 3GPP networks. It could be used for very efficient geolocation delivery of all real-time situational awareness data to many specific locations. [3]
A good example of an RF-based terrestrial platform is MerlinTPS. This terrestrial positioning system provides 100% terrestrial, RF-based assured positioning, navigation and timing. As part of its operation, the system naturally makes a spectrum map within the radius of each of its reference units. For example, coverage of the entire U.S. would take about 200 reference units, plus about 100 backup units. This RF spectral map is updated with one-second iterations, keeping the data up to date for any unfolding spectral and terrestrial events.
The MerlinTPS platform is based on modern-day SDR technology, ideal for flexibility of RF spectrum presence, as well as the growing use of AI. This feature then naturally could be used to create and maintain a total spectrum map and pattern of life.
The platform supports high-precision time transfer of plus or minus 10 ns, critical to A-PNT today, along with positioning and navigation services. The platform can also provide geolocation data for modern real-time GIS features needed for this new generation of real-time situational awareness.
The combination of MerlinTPS with use of the ATSC 3.0 pending EdgeBeam Wireless service could provide the highly full-featured capabilities to fuel the newest generation of real-time situational awareness networks.