The pace of deploying Europe’s own satellite navigation system continued to increase with today’s launch of the latest pair of Galileo satellites, doubling the number of satellites in space within nine months.
Galileo 11 and 12 lifted off together at 11:51 GMT (12:51 CET, 08:51 local time) atop a Soyuz rocket from French Guiana.
This sixth Galileo launch was a textbook operation: all Soyuz stages performed as planned, culminating in the Fregat upper stage deploying the twin satellites into orbit close to 23,500 km altitude, around 3 hours and 48 minutes after liftoff.
Liftoff of Galileo satellites 11 and 12 aboard Soyuz VS13 took place at 11:51 GMT on Dec. 17, 2015. (Photo: ESA)
“With today’s launch, Europe has doubled the number of its Galileo satellites in orbit in just nine months,” commented Jan Woerner, director general of ESA.
“Along with the ground stations put in place around the globe, this brings Galileo’s completion within reach. Initial Galileo services are scheduled to begin within next year, which proves the importance of this wise investment.”
“The excellent performance of these satellites, as measured on the ground, allows Europe to join the club of the worldwide providers of satellite navigation services,” noted Didier Faivre, ESA’s Director of Galileo and Navigation-related Activities.
“Production, testing and launch of the remaining satellites are now proceeding on a steady basis according to plan.
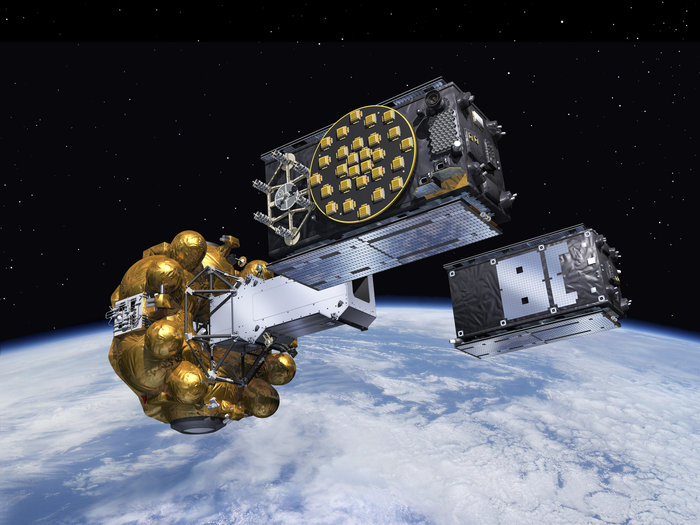
The Fregat upper stage flew the latest two Galileo satellites most of the way up to medium-Earth orbit before they finally separated. (Artist’s concept, courtesy of ESA).
“Then, after the summer break in 2016, the tempo of deployment will increase further with the first of three customised Ariane 5 launchers that will carry four rather than two satellites into orbit each time.”
This month will see the 10th anniversary of the launch of Europe’s very first navigation satellite: GIOVE-A, on Dece. 28, 2005. It secured the frequencies set aside for Galileo, gathered data on the medium-altitude orbit environment and flight-tested hardware for the working system.
GPS World‘s Leadership Awards were presented during a sponsored ceremony and dinner at ION GNSS+ 2015 in September in Tampa. The awards recognize significant recent achievement in four fields of position, navigation and timing: satellites, signals, services and products.
Nominations came from a group of industry executives and the magazine’s Editorial Advisory Board. Votes were cast by a slightly larger group of added VIPs from the community.
The Leadership Dinner was sponsored by Lockheed Martin, Harris, Raytheon and Braxton Technologies.
Satellites category winner
Marco Falcone, Galileo System manager, European Space Agency
Falcone led the Galileo program through a very difficult time, following the faulty orbital injection of the first two operational Galileo satellites in August 2014. He gave detailed descriptions of the anomalous launch, the planned activities to salvage what was possible from the event, and the likely impact of this event on the program. His mission control team worked around the clock to ensure that the satellites were configured so that final orbits would provide some utility to the Galileo program.
Remarks delivered by Daniel Blonski, system performance engineer at ESA, on behalf of Marco Falcone:
Marco Falcone, Galileo System manager, European Space Agency, winner of the 2015 Leadership Award for Satellites.
I would like to thank GPS World and the GNSS Community.
The recovery of satellites 5 and 6 of the Galileo constellation following the August 2014 launch wrong-orbit injection demonstrates the multidisciplinary capability of the European Space Agency and its industry. In fact, this recovery involved around 300 experts from our mission analysis and flight-control teams, system engineering signal and user receiver teams, space segment engineering teams, ground control and mission segment teams, as well as security operations. This award goes first of all to them for having believed in this recovery from the very first moment.
I apologise for not having been able to join this event in person due to the Launch and Early Operations Phase of the 5th Galileo Launch, which occurred Sept. 10. Galileo has now 10 (I repeat, 10) Satellites in orbit and operations are running smoothly. I count on GNSS chipset manufacturers to introduce Galileo constellation in their chipsets and eventually have Galileo-enabled devices as of next year.
In addition, the European Space Agency is also preparing for the future. In fact, we need already now to plan those system improvements that are necessary to replenish the constellation after 2020. These improvements go into the direction of higher positioning and timing accuracy, long-term validity ephemeris and faster time to first fix, improved interoperability with other GNSS and contribution to space users service volume, additional spoofing/jamming protection through authentication, enhanced online monitoring and signal-in-space flagging functionalities, as well as flexible digital signal generation to cope with the rapid time to market required for new services evolution.
Again, I thank you for recognizing the efforts of our teams at ESA and in industry. This award gives us even more energy.
Serving over A billion users every day
The most powerful GPS satellite ever is on its way
Remarks delivered by John Frye, program manager, Navigation Systems Advanced Programs, Lockheed Martin:
John Frye, program manager, Navigation Systems Advanced Programs, Lockheed Martin.
I would like to thank GPS World for the opportunity to speak briefly at this year’s GNSS Leadership Awards.
At Lockheed Martin, we are proud to continue our support of the U.S. Air Force’s GPS program. We applaud the Air Force on this year’s 20th anniversary of the GPS constellation reaching full operational capability.
This is a tremendous milestone in the history of positioning, navigation and timing, as well as global navigation satellite systems. In addition, I’d like to recognize tomorrow’s 68-year anniversary of the establishment of the Air Force.
Lockheed Martin is honored to have contributed to the GPS milestone. Right now, 19 of our GPS IIR and IIR-M satellites make up about 60 percent of the current GPS constellation. It is a real privilege to be serving more than a billion military, commercial and civilian users every day. But our commitment doesn’t end there. If you had the opportunity to see the pictures in our booth, you know that Lockheed Martin will soon be introducing the world to GPS III — the most powerful GPS satellite ever developed — and GPS III will be the first GPS satellite to field the internationally compatible L1C signal, offering a new level of GNSS compatibility.
So, thank you. It has been an honor to speak before you, the international PNT community. Thank you for all that you do, and congratulations to all of tonight’s honorees.
New messages: Any SBAS, any GNSS
Signals category winner
Todd Walter, senior research engineer, Stanford University
This past year, Todd completed the message design for dual-frequency, multi-constellation SBAS, a huge step forward for aviation and other multi-constellation users. It means that SBAS will be able to provide corrections and integrity data for all constellations, leading to better accuracy and availability.
Remarks delivered by Todd Walter:
Todd Walter, senior research engineer, Stanford University, and Ellen Mitchell, senior communications manager, Space and Intelligence Systems, Harris Corporation.
I ’d like to thank GPS World for this award. In reality, the work on the dual-frequency, multi-constellation SBAS messages has been a long ongoing group effort. Numerous people at Stanford, the FAA, Zeta, MITRE, ESA, CNES, RTCA, EUROCAE and others have contributed to the development of the planned messages on L5. ESA and CNES in particular have been handling the document management and comment resolution.
I would also like to especially thank my colleagues at Stanford University for their hard work and support.
The new messages now planned for L5 will allow any SBAS to correct any constellation that it chooses. Rather than only supporting L1-only signals on GPS, as the current systems do, SBASs will be able to support the use of two frequencies, using as many constellations and satellites as they choose to monitor.
We will no longer need to suffer availability outages due to limited satellite geometries. Furthermore, we will not suffer availability limitations due to ionospheric disturbances. Dual-frequency operation will allow precise vertical guidance throughout the globe, and in particular in equatorial regions.
The original L1 SBAS specification took more than 20 years of development. The new dual-frequency multi-constellation specifications are even more complicated and will require a similarly long development time. Our latest effort started many years ago when the GPS L5 was initially planned to be fully operational in 2018. Since that time, the GPS L5 date has moved back to 2024.
And in the mean time, the other constellations have progressed in their development. Our original efforts changed from a dual-frequency update to the SBAS messages into a truly multi-constellation concept.
In order to utilize new constellations and new signals for aviation, it is essential that the designs of these signals be stable and clearly documented. Furthermore, we require performance commitments from the constellation providers so that we can know what to expect.
To date, GPS leads the way in both of these requirements. Its signal designs have been stable and well described for many years, and it has published performance standards documenting the level of performance we can count on. There is widespread expectation that the other constellations will be very similar to GPS. However, this will not necessarily be the case.
We need to be prepared to deal with constellation-specific behaviors. Already we recognize differences in how GPS and GLONASS operate. We can only expect to uncover additional differences as we further utilize these constellations. Also, as we field new satellites and a new control segment on GPS, we can expect to see behavior that might be different from some of our fundamental assumptions.
It is important to plan for the future in order to incorporate new signals and new constellations; however, we must remain flexible with our planning to incorporate the reality of what we actually get.
— Postscript added in November: Thanks again for the award, it looks very nice on my desk!
All about the signal
Remarks delivered by Ellen Mitchell, senior communications manager, Space and Intelligence Systems, Harris Corporation:
On behalf of the Harris Corporation and its more than 22,000 employees, I congratulate the award recipients this evening. It is particularly fitting that Harris has the honor of presenting the Signals award. As the GPS navigation payload provider, we create and deliver the GPS signal. Furthermore, our products help our customers better utilize the GPS signal and detect and prevent jamming of the GPS signal. We’re all about the signal.
This is our first year at this dinner as Harris employees. As a result of Harris Corp. acquiring Exelis on May 29, there now are 9,000 engineers and scientists in the new company. Many Harris colleagues have expertise in areas directly applicable to cutting-edge GPS payload development, for example. Current and future customers will benefit from working with this larger and even more capable new team.
We believe the combination of Exelis’ heritage of proven, assured GPS navigation payloads joined with Harris’ skill in the RF spectrum, satellite communications and reprogrammable payloads gives the new company a unique and innovative edge to support the next generation of GPS satellites.
We look forward to telling you more about our progress at next year’s Leadership Dinner. But this year, now, without further ado, I’d like to call Todd Walter to the dais to receive the Leadership Award for significant recent achievement in the area of Signals. Thank you for this opportunity.
After the awards ceremony and dinner, attendees played the Interference Event, competing to see which team could generate the strongest, most accurate signal, conveying critical information in a GNSS trivia game.
Unprecedented opportunities
Services category winner
Jade Morton, professor, Colorado State University
For her work on advanced GNSS receiver algorithms for accurate and reliable operations in challenging environments; studies of the atmosphere using radar and satellite signals; and development of new applications using satellite navigation technologies. Her research has contributed to understanding of space weather phenomena and their effect on GNSS signals.
Remarks delivered by Morton:
Jade Morton, professor, Colorado State University
Thank you for a wonderful evening, and for offering the GPS World Leadership award to me. I am humbled!
Over the past decade, we have witnessed rapid progress in the development of multiple constellations of GNSS. While much of the focus has been on improvements in the availability, integrity, continuity, and inter-operability of multi-GNSS for PNT applications, a real winner as far as scientific discovery is concerned is in the use of GNSS in atmospheric and space weather studies. With a large and growing number of free open signals across a wide range of frequencies in the L-band, multi-GNSS will be able to provide distributed, low-cost, passive remote sensing of the atmosphere on a global scale. It is fair to say that there is no other technology that offers comparable potentials, coverage and cost-effectiveness.
In the coming decade, multi-GNSS will offer unprecedented opportunities for researchers to measure atmospheric and ionospheric parameters with high spatial and temporal resolution, and monitor atmospheric responses to solar, geomagnetic and other natural and man-made events.
This is an exciting time for multi-GNSS technological development and atmospheric research. I am fortunate to have the opportunity be a part of it and to explore and contribute to the interesting intersection between GNSS and the atmosphere.
Securing GPS against attack
Remarks delivered by Steve Moran, business development director, Raytheon:
Steve Moran, business development director, Raytheon
It’s great to be here with colleagues who understand the importance of a modernized GPS infrastructure.
I was asked to speak tonight because Raytheon is partnered with the Air Force in modernizing the GPS ground segment, which is at the core of the Air Force’s GPS modernization initiative. We like to call OCX the brains of GPS.
Over the past 30 years, GPS has ensured the safety and effectiveness of our nation’s warfighters and has become an integral component of global and national telecommunication, commerce and transportation infrastructures.
The GPS modernization initiative is essential to protecting our economy and the homeland, as GPS is an ingrained part of our nation and our world’s infrastructure. As critical as GPS is to so many key functions of daily life, it must be secured against cyber attacks.
The emergence of growing cyber threats creates daily headlines and drives an urgent need for GPS modernization. GPS has been recognized as an enabler of nearly all U.S. critical national infrastructure, such as the power grid or the water supply, and is a global utility that must be ready for emerging cyber threats.
OCX is a pathfinding program that answers that need and will deliver many other benefits to GPS users across the globe. Some of the new capabilities include enabling new civil and military signals; improving system accuracy and integrity; providing flexibility and evolvability to meet future mission needs; setting the bar for information assurance at an unprecedented level; and securely sharing information with net-connected users.
Raytheon’s OCX represents new approaches to emerging and even unimaginable changes and threats. We are confident that we have the right technology, team and resources in place to deliver the OCX program. It is critical we do so.
Thank you for inviting me here tonight, and I offer a sincere congratulations to all of the GPS World Leadership Award winners.
Novel GPS/GNSS uses just keep coming
Products category winner
Larry E. Young, GPS systems group supervisor, Jet Propulsion Laboratory
For many years he has been key in the development of radiometric technology. Specific areas of research include the development of GPS science receivers, multipath mitigation, sub-nanosecond clock synchronization, and sub-centimeter formation flying. He has been instrumental in developing the TriG multi-Global Navigation Satellite System receiver used in radio occultation to measure physical properties of the atmosphere, and key to NASA’s efforts to protect radionavigation satellite services from interference.
Remarks delivered on behalf of Larry E. Young by James J. Miller, deputy director, Policy and Strategic Communications, Space Communications and Navigation, NASA:
James J. Miller, NASA
I would like to thank GPS World and the GNSS community.
I greatly appreciate the honor conveyed by this award. We all know that most advances in technology are made by a team of smart, enthusiastic and hard working scientists and engineers. JPL’s advanced GNSS receivers are a true example of teamwork.
In particular, Don Spitzmesser was a prolific inventor who could quickly conceive of, build and test novel circuits and antennas. I do not think he ever passed kitchen utensils without thinking of antennas. There are actually “heli-wok” antennas in space. The original helix was wound onto a glass, glued onto a wok backplane.
Lyle Skjerve was a highly skilled experimentalist. His previous job was detecting incoming ground-to-air missiles from the backseat of a Marine jet, and conducting electronic countermeasures to steer the oncoming missile off course. In addition to being smart, he was quick to debug problems during an experiment, and never gave up.
NASA headquarters has provided great support to GNSS technology, continuing the program Jim Miller leads today. I especially thank John LaBrecque, who provided critical early support for our speculative development of the “all-digital” receivers that produced 0.1-millimeter baseline precision.
I have been very happy to be able to work on GPS, and I am most thankful for the great group of colleagues I’ve had the fortune to work with at JPL and from other NASA centers.
My training was in experimental nuclear physics, where I was excited to measure the anomalous orbital magnetic moment of a neutron orbiting inside a superconducting magnet on the beam line of a tandem Van deGraff accelerator. I always enjoyed building measurement systems for first-time measurements.
After graduation, I got an opportunity to shift from nuclear scales too small to see (femptometer) to those too large to imagine (109 lightyears), characteristic of the distances to quasars. In all, that was a change of 40 orders of magnitude! The Jet Propulsion Laboratory hired me to help develop Very Long Baseline Interferometry to measure tectonic plate drifts in real time, and oh yes, to precisely navigate NASA’s interplanetary spacecraft.
Larry e. Young, GPS Systems group supervisor, Jet Propulsion Laboratory
From VLBI, it was a short step to GPS. Even though quasars produce the greatest power levels known to man, the power per square meter is much higher from nearby GPS satellites. Scientists and engineers at JPL and elsewhere quickly realized that GPS would provide precision geodesy as soon as the first satellites were launched circa 1978.
During a 1984 receiver shootout among JPL’s SERIES and SERIES-X receivers, the MIT Macrometer, and Texas Instrument’s TI4100, we set up for the night’s experiment near an old Bilby tower in the desert. These were used in the old days to provide line-of-sight optical surveys. Now that we had GPS, those days were gone, and we (the shootout adversaries) teamed together and pulled down the tower, burning it to ward off the pre-dawn cold. It seemed quite symbolic. Remember, back then the only time four satellites were mutually visible in the winter was during early morning.
The current set of JPL’s receiver developments started when Tom Yunck realized we could use radio occultation, developed for interplanetary spacecraft, as a very useful means to probe the Earth’s atmosphere.
Novel uses for GPS/GNSS just seem to go on and on, as smart innovative people around the world continue to find productive new applications. Some of the older ideas we are working on include using non-GNSS signals for navigation and remote sensing, using GNSS signals as sources for bistatic radar measurements, and applying the GPS receiver’s precise phase shifters to form dynamic multiple high-gain antenna beams.
As always, advances in computers and chips will help drive applications. Our receivers have always been software driven and flexible, and the exponentially growing throughput of digital devices shows no signs of slowing. We are at a point where the number of GNSS satellites is exploding. Other signal sources are available to aid navigation and remote sensing. I do not want to call the exact shot, but I am confidant that at least one person reading this magazine today is already thinking of a new GNSS breakthrough, which will delight the world with its applications!
Commercialization and competition
Remarks delivered by Edward Baron, director, Braxton Technologies:
Edward Baron, director, Braxton Technologies
I would like to thank the GPS World team for organizing another wonderful awards dinner. As a commercial product company, Braxton is honored to help sponsor this event recognizing tonight’s Product Award innovator.
I’ve heard a few requests for innovation from the government this week. If they’re interested in innovation, I would like to make an argument for commercialization and competition as a key driver for it.
Within the navigation world, the receiver and application markets are excellent examples where innovation is driven by daily competition in a commercial market. It’s amazing to see the accelerating global pace of innovation these highly competitive markets drive — creating new and better products, along with their economic and social benefits.
We are also seeing competition between the constellations themselves, as they compete to increase their global market share.
If commercialization and competition drive innovation, and could benefit the performance of a constellation, who will take steps to commercialize other segments to improve their performance?
Galileo has already taken steps to commercialize their ground operations, and the U.S. is starting to talk about it.
It’s not possible to predict, but maybe in the future, GPS World will recognize someone for an innovation from a commercially operated GNSS system.
Shuren Guo, deputy director of China Satellite Navigation Project Center.
By Shuren Guo
In line with its three-step development plan, the BeiDou Navigation Satellite System (BDS) will constitute a complete space constellation by around 2020, when it will be comprised of five geosynchronous orbit (GEO) satellites and 30 non-GEO satellites, providing services for global users. The year 2015 is of particular significance for the BDS establishment, which has witnessed stable operation of regional services and formal deployment of new-generation satellites. These satellites possess higher performance and better compatibility and interoperability with other navigation satellite systems.
In March 2015, the first new-generation BDS satellite, or 17th BDS satellite overall, was launched at the Xichang Satellite Launch Center, and kicked off the deployment of the BDS global constellation. Launched and directly inserted into an inclined geo-synchronous orbit (IGSO) by a Long March launch vehicle with a newly designed upper stage, the satellite is equipped with a new bus system, as well as a payload system carrying inter-satellite links and new navigation signals.
In July 2015, two mid-Earth orbit (MEO) BDS satellites, the 18th and 19th overall, were launched into their scheduled orbits precisely with one single launch vehicle. More new types of payloads are on board, and the satellite performance is dramatically improved. After the in-orbit-delivery, these two satellites are able to interconnect with other existing BDS satellites, and jointly carry out the experiment and verification of the global network deployment process.
In September 2015, another BDS satellite was successfully launched into IGSO, and became the 20th of the BDS space constellation. Different from pervious launches, this satellite reached its designed orbit by using its built-in autonomous orbit maneuver mechanism. For the first time, the satellite also carries a Chinese-made hydrogen atomic clock, which provides enhanced time and frequency reference capacities.
Currently, these last four launched satellites are in normal working mode. The ongoing in-orbit tests show that these satellites satisfy the desired requirements. At present, tests and validations for the new navigation signal system, inter-satellite links, and the new atomic clock are being conducted. Once the tests and validations are completed, these satellites will be included in the network, and start to provide services for global users.
In 2016, BDS will keep improving its service performance. Three BDS satellites will be launched to boost up the deployment of global constellation. The construction of the BDS augmentation systems will be accelerated. Meanwhile, international cooperation activities will be further promoted, and the application development process will be attached with much importance, to broaden the fields and domains of BDS/GNSS applications.
“To serve the world and benefit Mankind” is not only the purpose of BDS, but also its commitment to the world. On the basis of maintaining stable services, BDS will make all efforts to enhance the performance, to speed up the deployment of global constellation, and to provide better services for global users.
Shuren Guo is the deputy director of China Satellite Navigation Project Center. He received his bachelor’s degree in electromagnetic theory and microwave engineering from Xi’an Jiaotong University, and his master’s in electronics and communication engineering from Beihang University. As a researcher, he has long been engaged in the design, research and development of the BeiDou Navigation Satellite System.
eLoran Antenna Park of 13, 200-meter masts at Anthorn, UK.
Readers of GPS World, its e-newsletters, website — and all interested PNT parties — are invited to register their opinion in the current poll at gpsworld.com/janpoll.
Should the U.S. government install a full eLoran network of broadcast stations to back up GPS in case of jamming, interference or other emergencies?
Yes.
No.
More study is needed before answering this question.
Don’t know.
Voters may enter their name in a drawing to receive a $50 gift card. Vote by Jan. 11, 2016.
Results will be published in the February issue of GPS World magazine.
On Nov. 25, 2015, President Obama signed the National Defense Authorization Act (NDAA) for Fiscal Year 2016, after vetoing a previous version. The enacted NDAA complies with the two-year budget agreement, which called for a reduction in defense spending.
The act reduces the GPS IIF line item by $2 million, citing “unjustified support growth” from the U.S. House of Representatives Committee on Appropriations, but otherwise recommends full funding for the Air Force GPS program ($936.775 million).
The NDAA also includes three GPS-related policy provisions: Reporting Requirement (Section 1621), Oversight Council (Section 1603), and M-Code Equipage (Section 1605).
New Space Law Mentions PNT Coordination Office
On Nov. 25, the president also signed the U.S. Commercial Space Launch Competitiveness Act. Title III of the act codifies the support that the Department of Commerce (DOC) provides to the National Coordination Office for Space-Based PNT.
Specifically, it tasks DOC’s Office of Space Commerce “to provide support to federal government organizations working on Space-Based Positioning, Navigation, and Timing policy, including the National Coordination Office for Space-Based Position, Navigation, and Timing.”
Senator Franken Reintroduces GPS Data Privacy Bill
On Nov. 10, Sen. Al Franken (D-MN) reintroduced the Location Privacy Protection Act, which he also introduced during the 112th and 113th Congresses. According to the Senator, “The Location Privacy Protection Act of 2015 closes legal loopholes that allow stalking applications to exist on smartphones.
Sen. Franken’s bill fixes this problem by requiring companies to get customers’ permission before collecting their location data or sharing it with third parties.” The bill joins several others in the 114th Congress that address geolocation privacy issues, including the Geolocation Privacy and Surveillance Act (“GPS Act”) and the Online Communications and Geolocation Protection Act.
The summaries here are from the GPS Bulletin, which is available through the gps.gov website.
A new high-accuracy technique using one dual-frequency GNSS receiver, precise point positioning (PPP) offers the possibility of cost-effectively obtaining coordinates. This study investigates the accuracy of kinematic PPP for hydrographic applications on rivers, and shows results comparable to double-difference solutions.
By Ashraf Abdallah and Volker Schwieger
Duisburg Harbor, Germany: site of the PPP survey.
Precise Point Positioning (PPP) is a challenging surveying technique for high-accuracy results. It offers the advantage of using one dual-frequency GNSS instrument. Estimation of a PPP solution is based on the ionosphere-free linear combination for code data and carrier-phase data.
Bernese Software. Bernese software V. 5.2 is a GNSS post-processing software, using GNSS measurement data for static and kinematic surveying. It processes the data in double-difference (differential GNSS) and zero-difference (PPP solution) techniques. The software was developed at the Astronomical Institute of the University of Bern.
Bernese software contains a group of different tools or programs to complete the processing for double-difference or zero-difference mode. The estimation of the two techniques has the same processing schedule in most of the pre-processing stages. The change appears later within the parameter estimations section.
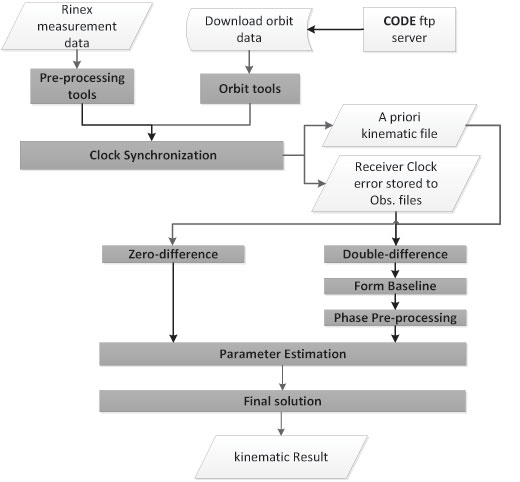
As shown in Figure 1, the processing starts with downloading the related orbits from the CODE (Center for Orbit Determination in Europe) FTP server. The orbit tools include the updating of the Earth orientation parameters to be in Bernese format, converting the satellite data to a specific format and generating the standard orbit format for Bernese software. A preprocessing program contains the smoothing of the RINEX data from outliers and cycle slips.
Figure 1. Bernese software processing schedule.
This smoothing step is following by converting the RINEX into Bernese binary format. The receiver clock is synchronized with respect to the GPS time and stored to observation files using clock synchronization tools. Using the code solution, a kinematic file is written to be inserted in the next parameter estimation procedure. For double-difference solution, a baseline is created, and this baseline is corrected from cycle slips for phase data. Parameter estimation is carried out by least-square estimation for the phase and code GNSS observations.
Kinematic PPP Solution. Bernese software provides the possibility to obtain the PPP solutions in automatic script (Bernese Protocol Engine [BPE]). The satellite orbit and clock ephemeris data from CODE center were used with intervals of 5 seconds to obtain highly accurate results. Satellite and receiver phase center offsets are considered. Tropospheric correction is applied using the Global Mapping Function (GMF) model for the hydrostatic and wet delay estimation. Regarding ionospheric correction, the estimation of the PPP solution is based on the linear ionospheric-free combination, with high-order ionospheric parameters to improve the estimation.
The ocean tidal loading correction is considered in the PPP estimation. Atmosphere tidal loading is also corrected.
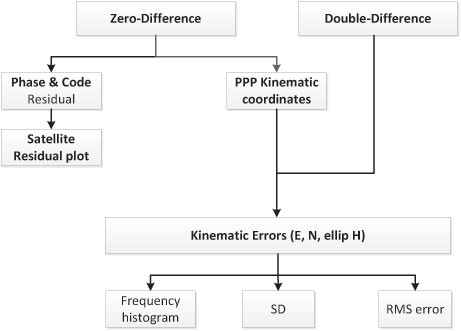
Figure 2 gives the analysis flowchart. Some outputs of the PPP solution could be visualized, such as the satellite phase and code residuals. The high residuals might come from the lower elevation angles of the satellites. Moreover, the residuals appear because of the effect of the remaining observation errors, such as atmospheric delay, multipath, or even the satellite orbit and clock residuals.
Figure 2. Flowchart of analysis strategy.
Regarding kinematic PPP solution, the error values in the east, north and ellipsoidal height are calculated with respect to the double-difference solution from Bernese software. The root-mean-square (RMS) error, which refers to the double-difference solution, and the standard deviation (SD), which is related to the mean value of the PPP solution error, are calculated, and the frequency histogram is plotted.
An antenna and a receiver were mounted on the surveying vessel to collect the GNSS data with an interval of 1 second during two days.
Experimental Work. Two kinematic trajectories were observed on the Rhine River in Duisburg, Germany, as a part of the project “HydrOs — Integrated Hydrographical Positioning System.” The project was launched in cooperation with Department M5 (Geodesy) of the German Federal Institute of Hydrology (BfG) and the Institute of Engineering Geodesy at the University of Stuttgart (IIGS) .
An antenna and a receiver were mounted on the surveying vessel (inset photo, opener) to collect the GNSS data with an interval of 1 second during two days. The virtual SAPOS (SAtellitenPOSitionierungsdienst der deutschen Landesvermessung) reference station was considered as a reference station, provided from the SAPOS-NRW team. SAPOS is a continuously operating reference station (CORS) GNSS service collecting data throughout Germany.
Results and Discussions
The layout of the first trajectory, which was observed for more than three hours, is presented in Figure 3. The measurements started from the inner harbour in Duisburg. The left figure shows the overview layout, and the right figure illustrates a zoom-in of the trajectory below two bridges. The white line refers to the kinematic PPP trajectory; the cross-hatched white line shows interpolated points between two solved points from the PPP solution. Because of loss of GNSS signals from the bridges, the yellow line indicates the actual vessel trajectory below bridges.
Figure 3. Layout of the first trajectory [DOY: 2014/126], zoom-in on bottom. (Photos: Google Earth)As mentioned before, the double-difference solution of the Bernese software is considered as the reference solution for the PPP solution. The PPP residuals for phase and code observations (not using double-difference solution) are presented in Figure 4. Here the residual values in phase and code have a gap because of the loss of GNSS signals, which starts from epoch 438 to 486 [GPS week second = 199845: 200115]. Additionally, there are some cycle slips from epoch 883 to 892 [GPS week second = 202105: 202150].
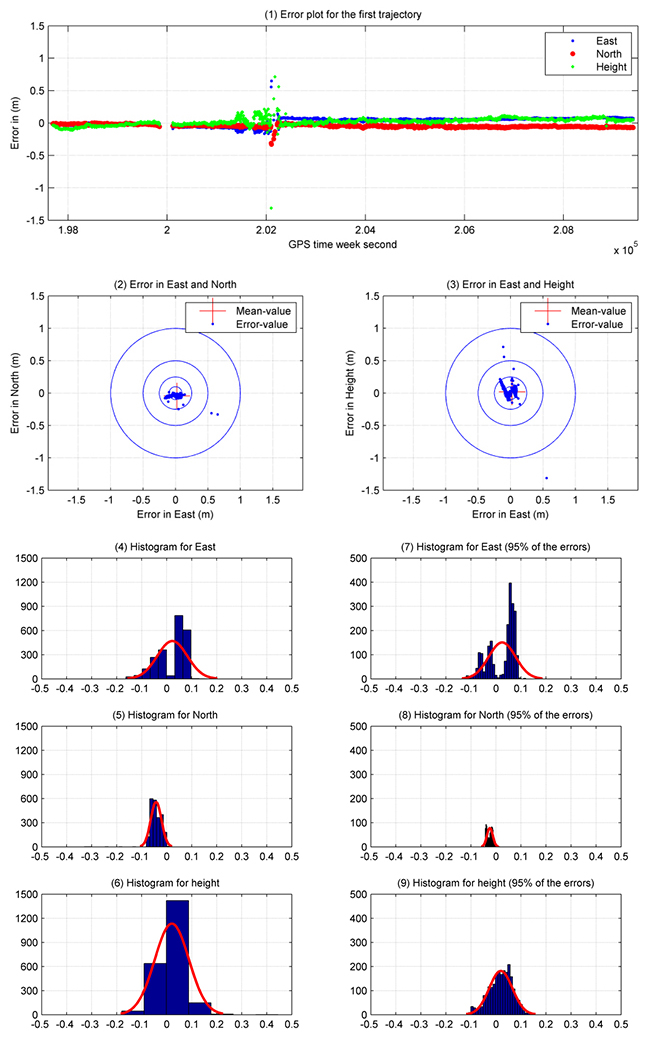
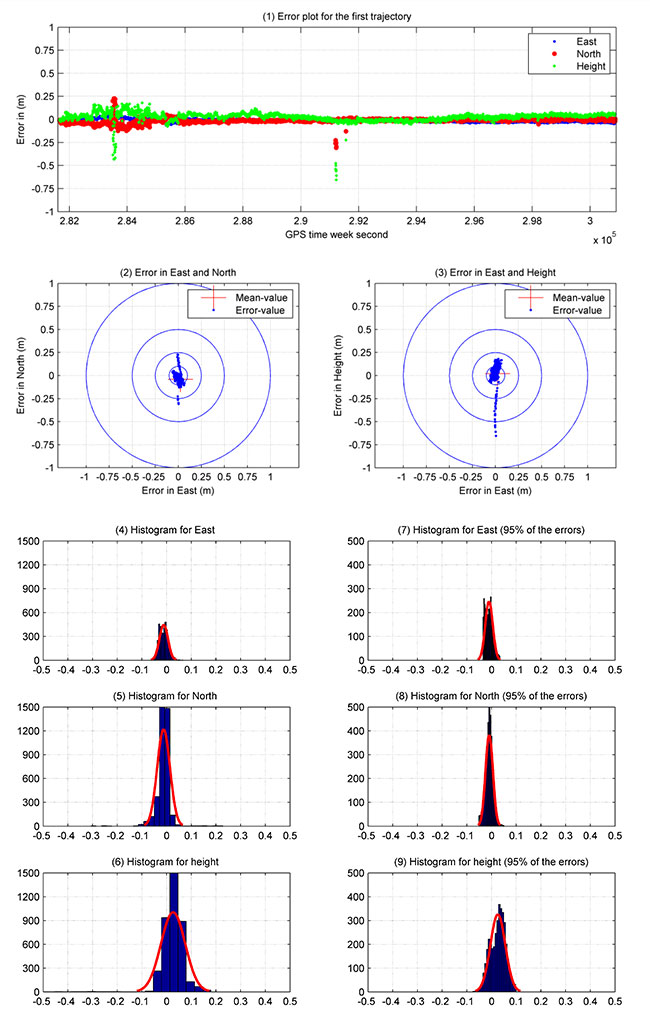
Figure 4. Satellite residuals for the first trajectory [DOY: 2014/126].To assess the accuracy of the PPP solution for this hydrographic trajectory, Figure 5 illustrates the analysis results for this trajectory between the double-difference and PPP solutions. The X-axis refers to the number of observations (one epoch/5 seconds), and the Y-axis indicates the error value in meters. Figure 5.1 shows the error plot (m) in east, north and height. As shown previously, the error values have a gap in the solution because of the loss of lock below the bridges. Moreover, there are some cycle slips later on, which decrease the estimated kinematic PPP accuracy.
Figures 5.2 and 5.3 provide the error plot for the east and north and east and height directions. The blue points refer to the errors, and the red cross refers to the mean value. Table 1 summarizes the PPP results.
Table 1. Statistical results of the first trajectory [DOY: 126/2014].Five percent of the PPP errors are eliminated to get outlier-free results. The SD (95%) of the kinematic PPP solution is obviously improved to reach 5.0 cm, 1.20 and 5.0 cm in east, north and height directions, respectively.
To distinguish between the standard deviation and the standard deviation based on 95 percent of the data, Figure 5 shows additionally the histogram of SD in Figures 5.4, 5.5 and 5.6 for east, north and height respectively. Figures 5.7, 5.8 and 5.9 provide the error with 95 percent of the results. Absolutely, the error range is improved by eliminating 5 percent of the data including outliers.
Figure 5. Analysis results for the first trajectory. Standard deviations shown in plots on the left, with outliers excluded, right.
Second Data Set. The second trajectory on the Rhine River was observed [DOY: 127] for more than 5 hours (see Figure 6). Sixteen satellites were observed during the measurement time.
Figure 6. Layout of the second trajectory [DOY: 127/2014]. (Photo: Google Earth)In Figure 7, the phase and code residuals are plotted. Some outliers are reported in this graph, which refers to cycle slips during the observations.
Figure 7. Satellite residuals for the second trajectory [DOY: 127/2014].Figure 8 illustrates the PPP results for this kinematic trajectory. Figure 8.1 shows the PPP error values in the east, north and height directions with respect to the double-difference solution from Bernese software.
Figure 8. Kinematic PPP solution for the second trajectory. Standard deviations shown in plots on the left, with outliers excluded, right.
The first 40 minutes of that trajectory were realized in a quasi-static observation technique (nonmoving vessel) from GPS week second 281660: 284060. The result obtained from this solution is more accurate due to the high number of satellites, and the trajectory did not include the bridges area. Figure 8.2 and 8.3 show errors in east and north, and east and height.
As shown in Table 2, the maximum and minimum values for the error range, which are presented in detail in Figure 8.4, 8.5 and 8.6, are reported in the east, north and height directions. These figures show the frequency histogram for the PPP errors. The RMS error from the solution is 2.10 cm and 2.90 cm in east and north respectively, with an RMS error of 5.60 cm in height. The standard deviation is definitely improved after eliminating 5 percent of the PPP errors as outliers. The standard deviation for 95 percent of the results shows 1.5 cm in east and north and 3 cm in height. The error histograms for 95 percent of the data are provided in Figures 8.7, 8.8 and 8.9.
Table 2. Statistical results of the second trajectory [DOY: 127/2014].The second trajectory clearly provides a higher accuracy than the first. Its data has a higher number of satellites and lower outliers than the first. Figure 8 shows the histogram of the second trajectory is similar to the Gaussian distribution curve.
Acknowledgments
The authors would like to thank Annette Scheider for receiving the GNSS measurements through the HydrOs project, our BfG partners Harry Wirth and Marc Breitenfeld, and Bernhard Galitzki form SAPOS-NRW for providing us with the reference stations.
This article is based on a peer-reviewed paper presented at the FIG Working Week, May 2015, in Sofia, Bulgaria.
Manufacturers
A Leica 1203+ antenna and GX1230+ GNSS receiver collected the data shown here.
Ashraf Abdallah is an assistant lecturer in engineering, Aswan University, Egypt, and a Ph. D. student at the Institute of Engineering Geodesy (IIGS), Stuttgart University, Germany. He received a master’s degree from Aswan University in applications of single-frequency GNSS.
Volker Schwieger is a full professor at the University of Stuttgart and director of the IIGS. He received a Ph.D. from the University of Hannover, focusing on GPS for monitoring applications.
Col. Steve Whitney, director, Space and Missile Systems Center’s Global Positioning Systems Directorate.
By Col. Steve Whitney
The year 2015 was an exciting one to assume leadership of the Global Positioning Systems Directorate. I’ve witnessed the men and women of our team accomplish some amazing things, across all of our efforts to modernize the constellation, and would like to take a moment to share our progress over the past year and set the vision for 2016 as we remain dedicated to excellence.
The past year has been another outstanding one in terms of delivering capability on-orbit. We’ve continued the pace from last year, placing another three new satellites into space, most recently including the launch of our 11th GPS IIF satellite, built by Boeing. This launch marks the 18th satellite to broadcast the Military Code (M-code) and second civil signals (L2C). Each time the dedicated professionals from government and industry, representing many, many organizations, have come together to show the world the gold standard.
GPS III. In the development of our next generation of satellites, the GPS team continues to make progress. In September, we completed flight qualification of the navigation payload and its software — many of you recall that this area has been a challenge for us over the years, and I wanted to share this success. Additionally, the first GPS III satellite entered into thermal vacuum testing at prime contractor Lockheed Martin’s facility in Waterton, Colorado, in October.
Thermal vacuum testing, or TVAC, is one of the last major events in the assembly and integration flow of the satellite and will prove out the hard work of the team. This first GPS III satellite is scheduled to be available for launch by the end of 2016. Lastly, we aren’t losing focus on the rest of the development units, as the second GPS III space vehicle is over 95 percent delivered and integrated at the GPS III processing facility.
OCX. Over in the development of the ground segment, it’s no secret we’ve had very significant cost and schedule challenges in the development of the GPS next-generation system, OCX. Right now, we are engaging with both our industry partner, Raytheon, and the Department of Defense leadership to plot a way forward to deliver these much-needed capabilities. This effort is intended to improve both Positioning, Navigation, and Timing (PNT) capabilities and cyber-security posture in increasingly contested, congested and competitive space and cyber domains.
User Equipment. The third area of our modernization efforts is our work on user equipment. Our military user equipment division continued to make acquisition history by pursuing a commercially driven strategy with all three contractors: L-3 Interstate Electronics Corporation, Rockwell Collins and Raytheon Space and Airborne Systems. They started the year by taking prototype cards to field exercises such as RED FLAG and are currently in full developmental testing of the functioning receiver cards. 2015 was an exciting year, and I’m proud to say 2016 will be no different.
As we enter 2016, I’d like to reemphasize a challenge my predecessor Brig. Gen. Bill Cooley laid out in his 2015 Directions article, “What It Takes to Make a Gold Standard.” A challenge that GPS manufacturers worldwide innovate and build products that utilize modernized civil signals and the improved PNT capabilities brought by the Civil Navigation message. After all, in February 2016 we will launch the 19th satellite to broadcast M-code and L2C signals as well as the 12th satellite to broadcast the third civil signal, L5. With 19 satellites providing global coverage of L2C, it’s now up to industry to take advantage of these capabilities and pave the way towards modernized civil navigation.
New Capabilities. For the first time in history, civil users will have access to what has been available to military users since the inception of GPS, full use of dual-signal frequency accuracy. This, combined with other advances, translates into increased PNT accuracy and resiliency for users worldwide. It’s time for the civil community to develop receivers that take advantage of these capabilities and usher in an era of more robust civil navigation.
The February 2016 launch also marks the end of an era. It is the 12th and final GPS IIF satellite to launch, presenting a finale to one of the most aggressive launch campaigns in recent history: seven GPS IIF satellites in 21 months! This satellite is the last GPS satellite considered “second generation,” a generation that began operations in 1989.
In total, Generation II GPS launches will have spanned over 28 years comprised of 61 space vehicles amongst five different blocks: II, IIA, IIR, IIR-M and IIF. Over these years, characteristics such as User Range Error (URE) have continuously improved, hallmarking the success of the GPS developers and operators past and present. In fact, from 2001 to 2014, URE was nearly cut in half, going from an annual average of 1.6 meters to just 0.7 meters for the civil user. These improvements will continue as we launch the next-generation GPS III satellites.
In preparation for continued success into the future, 2016 will also be the year the GPS Directorate begins acquisition of GPS III space vehicles 11+. On July 3, 2015, the Office of the Secretary of Defense for Acquisition, Technology and Logistics approved the acquisition strategy for the GPS III space vehicles 11+ Production Readiness Feasibility Assessment to verify if capable GPS III production designs exist beyond the current GPS III contractor. The results of the GPS III Production Readiness Feasibility Assessment will shape and inform a GPS III space vehicles 11+ follow-on production acquisition strategy in the FY17 timeframe.
Service. Also in 2016, the GPS Directorate will reaffirm our commitment to excellence and providing unparalleled service and capability. Challenges remain ahead, but the GPS Directorate is dedicated to delivering a ground system necessary for command and control of both today and tomorrow’s GPS enterprise. This includes the GPS Directorate’s pursuit of aggressive and innovative strategies to meet interim and future needs such as increasing the resiliency of the current ground system and investigating means for launching GPS III satellites as soon as possible so they are ready for operation at full capability with the completion of a modernized ground segment.
Just this past year, we successfully accomplished several “hardening” efforts of the current ground system, adding to its robustness against the threats of today and tomorrow. Another endeavor we are working on is providing options to higher headquarters for the early use of M-code.
The modernized GPS user equipment (MGUE) program will continue to pursue an innovative and aggressive acquisition strategy in 2016. Next year will kick off integrating receiver cards into service nominated lead platforms, which include the Defense Advanced GPS Receiver Distributed Device or D3, Joint Light Tactical Vehicle, Arleigh Burke-class Destroyer’s navigation system, and the B-2 Spirit. These efforts culminate with operational testing and eventually allow services to procure receiver cards directly. Over the next 12 months, the GPS Directorate also plans to begin work on a modernized GPS handheld, ensuring airmen, marines, soldiers and sailors have access to portable, accurate, and resilient position, navigation and timing powered by M-code. As MGUE is integrated into a myriad of DoD systems over the coming years, our users will continue to have the assured PNT needed to win today and tomorrow’s fight.
Team. Finally, you can count on the professionals of GPS Directorate’s team to continue to exhibit acquisition excellence. It’s been six months since I assumed leadership of the GPS Directorate, and I am amazed every day with the passion and accomplishments of our people — which includes military, civilian, support contractors, federally funded research and development center partners and our industry partners. I feel privileged to work with each and every one of them on daily basis and look forward to what 2016 has in store for us all.
A final thanks to you, the GPS user. With over 4 billion users and an ever growing-economic impact, you motivate us to continue to improve and assure this vital mission.
Galileo satellites 11 and 12 are mated with their dispenser. (Photo: ESA)
News from the European Space Agency
Galileos 11 and 12 are on the launch pad, attached to the top of their Soyuz rocket in readiness for this week’s launch. Europe’s next navigation satellites are due for launch at 11:51 GMT (12:51 CET, 08:51 local time) on Thursday, Dec. 17, from Europe’s Spaceport in French Guiana.
On Dec. 10, the two satellites, already attached to their carrier, were fixed to the Fregat upper stage before the halves of the protective Soyuz fairing were closed around them on Friday. This marked the completion of the ‘upper composite’ — the combination of Galileo satellites, dispenser and the upper stage that will fly them the bulk of the way up to their medium-altitude orbit.
Meanwhile, the first three stages of the Soyuz were assembled horizontally, rolled out to the pad, and raised to the vertical. The upper composite was moved to the pad on Sunday afternoon, hoisted to the top of the tower and then then carefully attached to Soyuz.
The Dec. 14 Launch Readiness Review opened the way to Soyuz fueling and finally launch.
Galileos 11 and 12 are on the launch pad, attached to the top of their Soyuz rocket in readiness for this week’s launch. (Photo: ESA)
This latest Galileo campaign began with the arrival of the satellites in French Guiana on Oct. 30. This is the sixth Galileo launch overall, and the third launch of 2015, and will bring the number of Galileo satellites in space to 12. It takes place just 11 days before the 10th anniversary of the liftoff of Europe’s very first navigation satellite.
The experimental GIOVE-A took off on Dec. 28, 2005, to reserve operational frequencies, test key hardware and gather data on the orbital environment for the Galileo constellation to follow. GIOVE-B followed in April 2008.
Since then, not only has the first third of the Galileo constellation reached orbit, but a network of Galileo ground stations has been erected across the globe.
In future, the number of satellites that can be inserted into orbit with a single launch will double from two to four, when a customized Ariane 5 rocket becomes available to complement Soyuz.
Sergey Karutin, GLONASS designer general (left); Nikolay Testoyedov, director general, SC Information Satellite Systems (center); and Andrey Tyulin, director general, SC Russian Space Systems.
By Sergey Karutin, Nikolay Testoyedov and Andrey Tyulin
Currently, Global Navigation Satellite Systems (GNSS) are widely used in transportation, power systems, agriculture, communication, banking and the service sector. Humankind has very rapidly realized the benefits of GNSS use and therefore its dependence on the “artificial navigation field” is constantly growing. That is why at the present stage of GLONASS development, the major research and development foci include not only activities aimed at enhanced accuracy, availability and integrity of navigation, but also theoretical and practical efforts focused at ensuring resilience of navigation (interference mitigation).
These activities logically evolve from the changes GLONASS has experienced over the last decade, establishing the essential groundwork to boost the demand in its services. In 2011, the fully operational constellation of 24 GLONASS-M satellites was deployed. For the first time, civil users got the benefit of navigation signals in two frequency bands (L1 and L2) for positioning.
The GLONASS-K satellite launched the same year transmits a new navigation signal in the L3 frequency band. Its onboard atomic clocks include two Cesium and two Rubidium frequency standards. Implementation of these onboard frequency standards with long-term relative stability less than 5×10-14 provides better accuracy without reliance on ground control. The program of onboard atomic frequency standards development also includes design of a hydrogen maser with relative daily stability of 5×10-15 and its in-orbit validation onboard GLONASS-K satellites in 2017–2018.
Simultanesously, the high reliability of GLONASS-M satellites operating beyond their design lifetime, 1.5 times longer in some cases, led to a change in the constellation replenishment strategy. In 2012, the launch-on-demand approach was adopted for future satellites. Currently, nine GLONASS-M satellites are in ground stock, scheduled for launch in 2015–2017 timeframe.
These factors caused a three-year delay in constellation modernization and launch of new GLONASS-K satellites.
Nevertheless, in 2014 GLONASS-K No. 12 was put into orbit with the single phased antenna array for the L1/L2/L3 signals. GLONASS-M satellites No. 55–61 also have the enhanced functional capabilities due to additional L3 navigation payload. The string structure of navigation message digital information provides for a higher rate of data update in case of necessity.
We contribute to the user navigation equipment interference mitigation capabilities by developing GLONASS signals at the frequency bands different from the common frequencies accepted for GPS, Galileo and BeiDou. It is common knowledge that, in some cases, low-end personal jammers made to jam the L1 band with the center frequency of 1575.42 MHz and installed in vehicles may cause severe problems to critical infrastructure. In similar situations, use of 1600.992 MHz and 1248.02 MHz center frequencies (new GLONASS CDMA signals) allows improving the reliability of navigation.
Efforts on the global network of the radio and laser-ranging stations for precise orbit determination and time synchronization (ODTS) are also of note. Six GLONASS measuring stations have been established abroad so far. Further expansion of the network is scheduled for 2015–2016 to ensure ODTS accuracy of up to 0.1 meter in real time during the next few years.
Global use of GLONASS is impossible without international cooperation, and we pay special attention to the recommendations of the UN International Committee on GNSS. In particular, we are finalizing the GLONASS Open Services Positioning Performance Standard and developing the national GNSS Performance Monitoring and Assessment System to be used to continuously monitor quality of the GLONASS services and its compliance with the standard.
Septentrio has launched its next-generation GNSS receiver for precise scientific and geodetic applications — the PolaRx5. This new receiver in the PolaRx product line is developed specifically to support the most demanding applications for the Earth science community offering a select range of advanced features that enable maximum accuracy and functionality.
Powered by Septentrio’s next generation multi-frequency engine, the PolaRx5 offers 544 hardware channels for robust and high-quality GNSS tracking. The receiver supports all major satellite signals including GPS, GLONASS, Galileo and BeiDou, as well as regional satellite systems including QZSS and IRSS.
Septentrio’s Advanced Interference Mitigation (AIM+) technology enables the PolaRx5 to filter out both intentional and unintentional sources of radio interference, from narrowband signals over high-powered pulsed signals to chirp jammers and Irridium interferers. Furthermore, Septentrio’s patented APME+ multipath mitigation technology — which eliminates short delay multipath without introduction of bias — guarantees superior measurement quality. If needed, the user has the ability to activate or deactivate APME+ to obtain completely unmodified measurements.
Various independent tests have shown PolaRx5 consistently ranks high among GNSS receivers in many areas of measurement quality, including fewest number of cycle slips and lowest power consumption well below 2W.
PolaRx5 also introduces a new standard in ease-of-use. Thanks to Septentrio’s comprehensive web interface and the built-in Wi-Fi and Bluetooth interface, users have complete control and visibility of the receiver. The user’s web browser provides secure access to all receiver settings and status, data storage and firmware upgrades, as well as advanced monitoring such as a built-in spectrum analyzer.
“With PolaRx5, Septentrio has developed an advanced GNSS reference receiver to meet the advanced needs of our customers,” said Jan Leyssens, PolaRx5 product manager. “The selection of PolaRx by UNAVCO for their reference receiver needs illustrates the strengths of Septentrio’s robust technology and PolaRx’s innovative features such as its interference robustness, spectrum analyzer and web interface to make the PolaRx5 the leading GNSS reference receiver on the market today.”
The Federal Aviation Administration announced on Dec. 14 an official rule and registration process for hobbyists who own small unmanned aircraft weighing more than 0.55 pounds and less than 55 pounds, including payloads such as on-board cameras.
The online registration system does not yet support registration of small UAS used for any purpose other than hobby or recreation — for example, using an unmanned aircraft in connection with a business. The FAA is developing enhancements that will allow such online registrations by spring of 2016.
The registration procedure is a statutory requirement that applies to all hobby aircraft. Under this rule, any owner of a small UAS who has previously operated an unmanned aircraft exclusively as a model aircraft prior to Dec. 21, 2015, must register no later than Feb. 19, 2016. Owners of any other UAS purchased for use as a model aircraft after Dec. 21, 2015, must register before the first flight outdoors.
The Registration Task Force delivered recommendations to FAA Administrator Michael Huerta and Transportation Secretary Anthony Foxx on Nov. 21. The rule incorporates many of the task force recommendations, the FAA says.
“Make no mistake: unmanned aircraft enthusiast are aviators, and with that title comes a great deal of responsibility,” Foxx said in the announcement. “Registration gives us an opportunity to work with these users to operate their unmanned aircraft safely. I’m excited to welcome these new aviators into the culture of safety and responsibility that defines American innovation.”
Owners may register through a web-based system or paper-based process. There is a $5 registration fee, but the FAA is offering a full rebate for those who register before Jan. 20, 2016.
Under the rule, each aircraft must be marked with a unique number, although not necessarily the serial number. The goal is to help authorities track down an owner if a drone collides with another aircraft, flies too high or encroaches on an airport.
Registrants will need to provide their name, home address and email address. Upon completion of the registration process, the web application will generate a Certificate of Aircraft Registration/Proof of Ownership that will include a unique identification number for the UAS owner, which must be marked on the aircraft.
Owners using the model aircraft for hobby or recreation will only have to register once and may use the same identification number for all of their model UAS. The registration is valid for three years.
“We expect hundreds of thousands of model unmanned aircraft will be purchased this holiday season,” Huerta said. “Registration gives us the opportunity to educate these new airspace users before they fly so they know the airspace rules and understand they are accountable to the public for flying responsibly.”
Shenzhen FLYPRO Aerospace Tech Co. has officially released the XEagle, an unmanned aerial vehicle (UAV) equipped with auto follow and obstacle avoidance functions.
Unlike other popular self-flying drone models on the market that are taken off by throwing the aircrafts in the air, which increases the risks of crashing the vehicles, XEagle introduces various features including voice control, smartwatch and automatic obstacle avoiding to offer a better user experience. By liberating both hands, users do not need to have any previous knowledge and experience when handling an XEagle.
Designed for recording sports activities, FLYPRO has replaced traditional UAV remote controllers with XWatch for the new XEagle. XWatch is a smartwatch designed to control XEagle that’s portable and easy to navigate — users can control the devices to take off, land and follow, as well as adjust flight height with just one click on the wrist within 300 meters. The smartwatch design enables users to fly the aerial vehicles to take high-definition pictures and videos while engaging in intense sports such as skiing and mountain bike cycling.
The voice control feature allows hobbyists to fly the XEagle without moving their hands at all — the built-in intelligent voice recognition system responses fast and accurately to commands in both Chinese and English. Users only need to instruct the XEagle with commands such as “FLYPRO, take off” and “FLYPRO, follow me” to launch the XEagle in the air and have it follow automatically.
To lower the risk of crashing the UAV in both takeoff time and during flight, XEagle offers a crash prevention solution by installing four layers of protection. With an infrared obstacle avoidance system and built-in photoelectric sensors, the XEagle can calculate precisely and in real time for obstacles to avoid collisions. The detection is effective when the obstacle is at the distance between 0.1 to 15 meters with relative velocity of 12 meters per second. The UAV can dodge obstacles and barriers while flying in the air by changing its flight path automatically.
As a newcomer in the UAV market, FLYPRO’s technological breakthrough in developing consumer drones not only resolves the safety concerns customers have with other similar UAVs, but also improves user experience through innovative control measures that makes flying the drones as easy as clicking a button, leading the UAV industry with the company’s user-centered philosophy and high product quality standards.
“Now, customers favor UAV products with lower risks associate with operating the aerial vehicles as well as technological innovations that enable users to perform complex tasks without advanced training. When other companies are looking for ways to make UAV products more accessible to the public, FLYPRO has already achieved that with our innovative functions like smart watch control, auto follow and obstacle avoidance that allow everyone to enjoy flying the UAVs for sports and entertainment,” said Lin Hai, founder and CEO of FLYPRO.




















![Figure 3. Layout of the first trajectory [DOY: 2014/126], zoom-in on bottom. (Photo: Google Earth)](https://stage.globalpositioningnews.com/wp-content/uploads/2015/12/Figure-4-W.jpg)
![Figure 4. Satellite residuals for the first trajectory [DOY: 2014/126].](https://stage.globalpositioningnews.com/wp-content/uploads/2015/12/Figure-5-W.jpg)
![Table 1. Statistical results of the first trajectory [DOY: 126/2014].](https://stage.globalpositioningnews.com/wp-content/uploads/2015/12/Table1.jpg)
![Figure 6. Layout of the second trajectory [DOY: 127/2014]. (Photo: Google Earth)](https://stage.globalpositioningnews.com/wp-content/uploads/2015/12/Figure-7-W.jpg)
![Figure 7. Satellite residuals for the second trajectory [DOY: 127/2014].](https://stage.globalpositioningnews.com/wp-content/uploads/2015/12/Figure-8-W1.jpg)
![Table 2. Statistical results of the second trajectory [DOY: 127/2014].](https://stage.globalpositioningnews.com/wp-content/uploads/2015/12/Table2.jpg)














