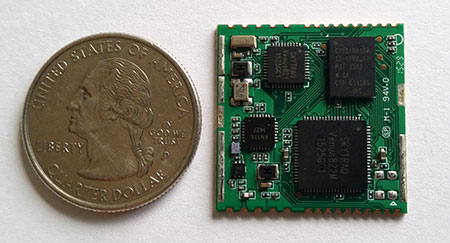
SkyTraq’s S2525F8-BD-RTK multi-constellation RTK receiver is designed for UAV and mobile platforms.
SkyTraq Technology, a fabless GNSS positioning technology company, is introducing the S2525F8-BD-RTK, a cost-effective, low-power single-frequency RTK receiver for unmanned aerial systems and mobile platforms requiring centimeter-level position accuracy.
The S2525F8-BD-RTK multi-constellation RTK receiver supports GPS, BDS, QZSS, and SBAS, simultaneously tracking up to 28 satellites. With its 25 x 25 millimeter form factor, 300-mW power consumption and 3 gram weight, it is designed for any outdoor applications requiring high-precision RTK positioning.
S2525F8-BD-RTK supports both base station and rover modes. As a rover, it receives RTCM 3.0 or 3.1 data from a base station, or raw measurements from another S2525F8-BD-RTK receiver serving as base station, and performs carrier phase RTK processing to achieve relative positioning with 1 cm + 1 ppm position accuracy within 10-Km baseline.
Its compact evaluation board has serial interface connector supporting direct connection to Ardupilot and Pixhawk autopilots for UAS testing. A Bluetooth 2.1 module is included on-board to simplify outdoor evaluation using Bluetooth-connected smartphone or tablet to receive remote base station data via NTRIP client software over the Internet.
S2525F8-BD-RTK engineering sample, datasheet, reference design and evaluation kit will be available in October. Volume production delivery to customer begins in November 2015.
The Galileo Control Centre in Oberpfaffenhofen, Germany, monitors and controls the constellation with a high degree of automation. (Photo: ESA)
News courtesy of the European Space Agency
Europe’s latest pair of Galileo satellites has passed its initial check out in space, allowing control to be handed over to the main control centre and join the growing fleet.
“This was a beautifully smooth start to the mission,” said ESA mission director, Richard Lumb. “From liftoff through to handover to the constellation operator and beyond, this has been a textbook performance not only of the satellites but also for all the operations and manufacturer teams on the ground.”
Galileos 9 and 10 were launched on Sept. 11. Their individual lives began within four hours, as they separated from their rocket’s final stage, overseen from ESA’s ESOC operations centre in Darmstadt, Germany. Days of round-the-clock effort followed, to bring the satellites to life, beginning with closely monitoring the unfolding of their solar wings and their pointing towards the Sun.
The various satellite elements were methodically switched on, their health checked and readied for work. Liviu Stefanov, an ESA flight director, described the process as “one of the smoothest yet.” The satellites fired their thrusters to drift towards their target orbital positions at around 23,222 km altitude — helped along in this case by a near-perfect orbital injection to begin with.
Firings will resume around the end of October to stop the drift and achieve fine positioning in orbit, guided by ESOC’s specialist flight dynamics team.
The accuracy of the Galileo system relies on the orbital position of its satellites being fixed to a very high level of precision.
Once on their way, the satellites were handed over on 19 and 20 September, respectively, to the Galileo Control Centre in Oberpfaffenhofen, Germany managed by SpaceOpal.
The team of engineers from ESA and France’s CNES space agency are preparing for the next launch, scheduled for December. The early phase for Galileos 11 and 12 will be overseen from CNES in Toulouse, France, which alternates with ESOC as hosts.
The navigation payloads on Galileos 9 and 10 still need to undergo detailed testing, led from ESA’s Redu centre in Belgium with the support of both Oberpfaffenhofen and the second Galileo Control Centre in Fucino, Italy, which has oversight of Galileo’s navigation mission.
This phase ensures the latest satellites’ navigation and search and rescue payloads are operating normally, giving them a clean bill of health before they can join the Galileo constellation.
With a name like beast mode RTK it better be something pretty impressive. I think we are all looking for ways to become more productive and more efficient in the course of our fieldwork. I think the analogy could be made that beast mode RTK is to GNSS as what the EDM was to the steel tape.
Beast mode RTK is 5 Hz corrections coming from the base. While other receivers have advertised 5 Hz corrections for a long time they have not actually preformed at 5 Hz. The new Beast Mode from JAVAD GNSS actually preforms at 5 Hz. With typical RTK gps receivers an epoch is counted at 1 second which is 1 Hz corrections. With Beast Mode by JAVAD GNSS an epoch is only 0.2 seconds or 5 Hz corrections.
So, for those of you who typically measure your control and your property corners for 180 epochs, which is typically three minutes, now it will only take you 36 seconds with no discernible loss in accuracy or precision.
So what does Beast Mode from Javad GNSS actually mean to a surveyor? Beast Mode means that a surveyor can spend more time on quality control and less time just sitting there waiting to get a fix. For instance: With the combination of Beast Mode and Javad’s Cluster Average feature you can shoot in all of the property corners on a project, then shoot the property corners again one the way back. Once you have located all of the property corners (2 times in this scenario) you can use Cluster Average and average all shots that are within a user defined tolerance, giving increased relative precision for each individual point. All of this being done in less time than a typical RTK survey with increased relative precision and having redundancy to verify that all property corners are exactly where we say they are.
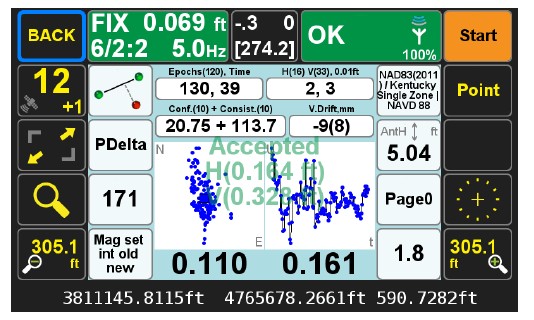
This is a screen shot of the Triumph LS running Beast Mode. You can see the epoch count on this shot is 130 epochs. Right beside the epoch count you will notice that it only took 39 seconds to get all 130 epochs. The 0.110 and 0.161 at the bottom of the screen is the peak to peak error over the 130 epochs for this one shot. The HRMS value of this shot is 0.02’.
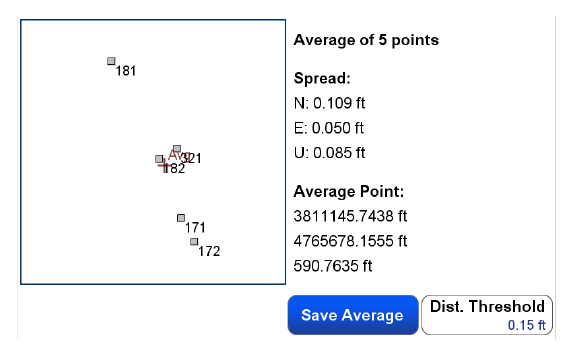
This is a screen shot after using cluster average. I located this same mag nail 4 times over the time span of two days. You can see in this screen shot that the overall spread or peak to peak error between all 4 points is 0.10 in the North and 0.05 in the east.
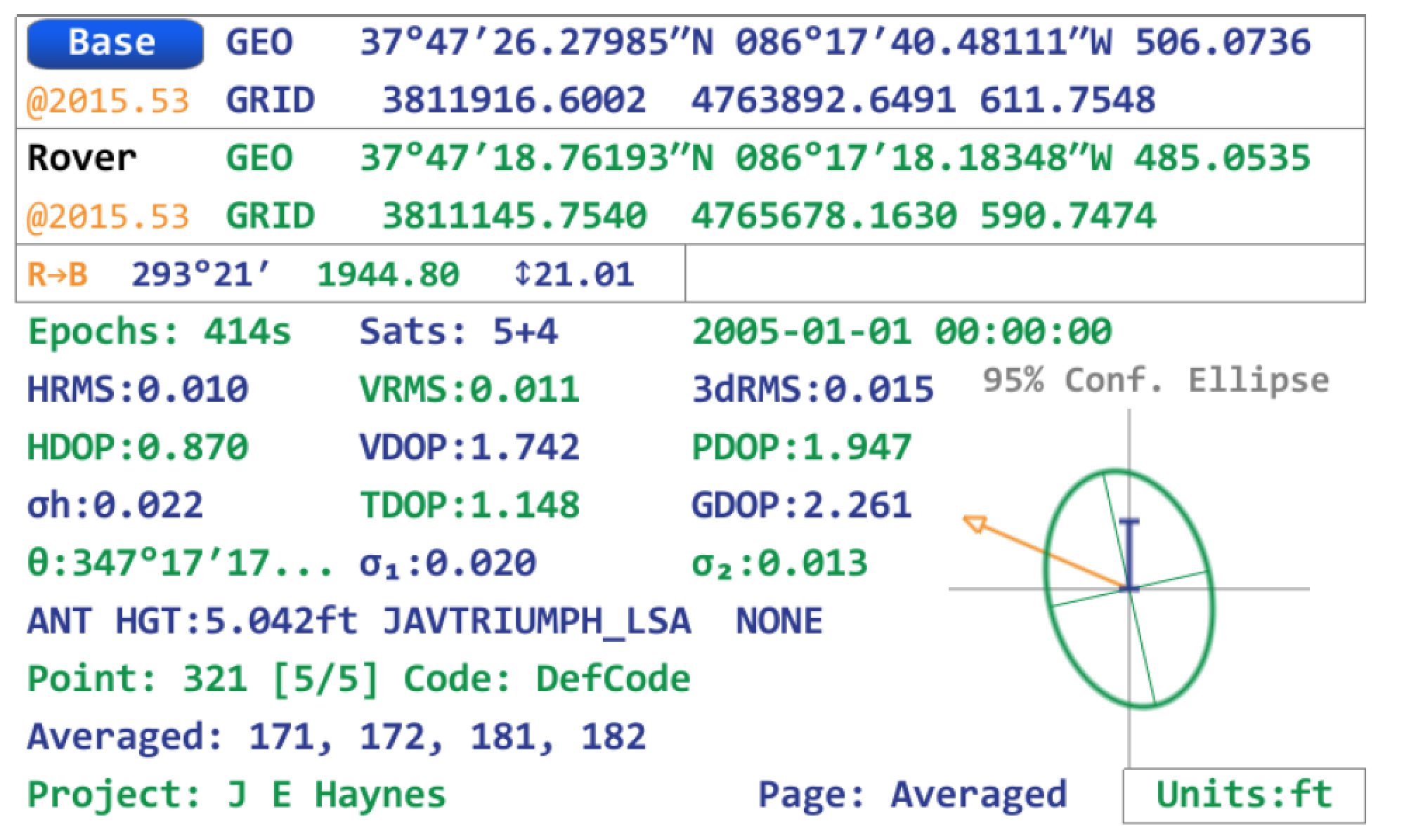
This is a detailed statistics screen shot of the averaged point. It gives a total number of epochs recorded with the overall RMS value. All of this information and more can all be exported in an HTML format for documentation. The redundancy of this point was completed in less time that could have been completed with any other receiver due to Beast Mode RTK from Javad GNSS. With all of this said, the bottom line is efficiency and redundancy. There is not another receiver on the market that allows for the efficiency and the redundancy that the Javad Triumph LS GPS receiver with Beast Mode RTK and Cluster Averaging offers.
For more information on JAVAD’s J-Field software, the Triumph LS or other JAVAD GNSS solutions please feel free to visit www.javad.com , email [email protected] or call 1-888-550-5301 or 1-408-770-1770.
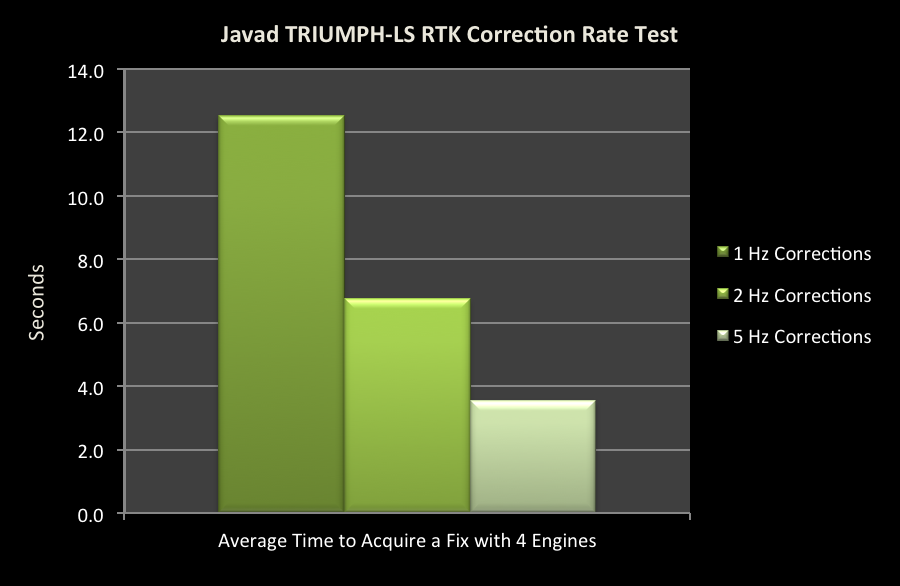
In another industry first, JAVAD GNSS has added the ability to transmit and process RTK base station corrections at rates greater once per second (1 Hz). The current industry standard has been to transmit and process corrections once per second. The JAVAD GNSS RTK engineering team recently hypothesized that increasing the rate of corrections would reduce the time for their RTK systems to acquire fixed RTK solutions. Mathematically the time required to acquire a fix is inversely proportional to the rate of the corrections.
Many existing RTK systems on the market have the ability to extrapolate 1 Hz corrections so that RTK positions can be computed at rates greater than 1 Hz. This innovation is advantageous with machine control applications where the GNSS antenna is in motion and it is desirable to know its position more than once per second. It, however, does not reduce the time required for the RTK engines to acquire fixed solutions. J-Field, JAVAD’s field software for the TRIUMPH-LS and Victor-LS, has RTK Verification and Validation features that reset the RTK engines to ensure a bad fix never gets accepted in areas under tree canopy and areas with high multipath. By reducing the time for the RTK engines to fix, RTK Verification and Validation can be completed much quicker and surveyors can collect points in locations that previously very difficult and time consuming.
J-Field and the RTK firmware have been improved to allow corrections to be processed at 2 and 5 Hz. These corrections can be transmitted through Javad’s UHF and spread spectrum radios or through the internet with a TCP connection between the base station and rover. Those who have used the TRIUMPH-LS with 5 Hz corrections have described the system as operating in “Beast Mode” due to its much improved performance. In a recent test to quantify the improved performance with acquiring a fixed solution, a TRIUMPH-LS was setup to automatically collect 100 points in succession with correction rates of 1 Hz, 2 Hz and 5 Hz. RTK Verification was used to reset the RTK engines once and then collect 1 epoch after at least 4 of the 6 parallel RTK engines of the system have fixed, essentially measuring the time required for 4 of the RTK engines to fix. The test location was in an environment with some multipath and an approximately 75 percent open view of the sky.
With 2 Hz corrections, the average time for 4 engines to fix was reduced by 46 percent to 6.7 seconds compared to 12.5 seconds with 1 Hz corrections. With 5 Hz corrections it was reduced by 72 percent to 3.5 seconds. The JAVAD RTK engineering team currently has further plans to improve the RTK firmware to allow correction rates even greater than 5 Hz to be used and tested. With this and JAVAD’s continued commitment to develop new and innovative features, the limits and applications for survey grade GNSS receivers continues to expand.
Galileo satellites 9 and 10 are functioning perfectly, and the initial series of flight operations is continuing as part of the critical launch and early orbit phase, according to a European Space Agency Rocket Science blog by Daniel Scuka.
Galileo 9 and 10 lifted off together at 02:08 GMT on Sept. 11 from Europe’s Spaceport in French Guiana atop a Soyuz launcher, bringing to 10 the total number of Galileo satellites in orbit.
“The pair are being stepped through an intense series of check-outs, confirmations, mode changes, configurations and health verifications by the joint ESA/CNES mission team working around the clock at ESOC, Darmstadt, Germany,” Daniel writes. “The team are now focusing on conducting a series of thruster burns designed to start the drift of the two satellites toward their target orbital positions.”
“Following the burns performed during the LEOP (launch and early orbit phase), the satellites will continue naturally drifting, ending up in their final desired operational orbits at about 23,222 km after another set of thruster burns, planned to achieve fine positioning in orbit, around the end of October,” said Liviu Stefanov, co-flight director from ESA.
With the excellent performance of the spacecraft and the ground teams, the LEOP is expected to wrap up soon.
Broadcom Corporation has announced a new GNSS chip for Internet of Things (IoT) and wearable devices that simplifies integration of GNSS into low-cost products. The advanced chip enables devices such as fitness bands to deliver pinpoint location while consuming minimal power and in some cases can eliminate the need for a separate microcontroller (MCU).
The Broadcom BCM47748 removes a bulk of the signal processing from the device MCU by calculating position, velocity and time (PVT) on-chip, delivering significant system power savings. The chip uses intelligent firmware to extend battery life while also maintaining accuracy in speed, distance and position for an enhanced user experience.
Broadcom At ION GNSS+: Broadcom’s Stephen Mole is presenting on the topic of achieving low power consumption in wearables at ION GNSS+ 2015, taking place Sept. 14-18 at the Tampa Convention Center in Florida. Stephen will present during the A5 session, Applications using Consumer GNSS, on Friday, Sept. 18, at 9:40 a.m. inRoom 23.
“Broadcom is extending its navigation leadership into the IoT ecosystem by helping customers deliver a premium location experience without compromising battery life or requiring a costly, power-hungry host processor,” said Prasan Pai, Broadcom senior director, Wireless Connectivity. “With more consumers demanding GNSS in a wider variety of applications, we see a tremendous opportunity to expand our reach into new devices with market-leading GNSS technology.”
By absorbing location computations on-chip, Broadcom not only reduces power consumption but can also dramatically lower costs for original equipment manufacturers (OEMs) by replacing the device MCU and reducing board space. Additionally, firmware inside the BCM47748 automatically adapts to user activity and context, whether biking, walking or running, to provide precise location results to the user, enabling performance that is not sacrificed for power savings.
Key features:
PVT computed on-chip
Integrated GNSS receiver with concurrent support for GPS and GLONASS, combined with accelerometer inputs to produce stable, accurate and low power speed and distance
Context engine and adaptive firmware to enable low power consumption for every activity and context without compromising accuracy
Ability to produce GNSS fixes with only 5mA current consumption in certain scenarios
MCU host interfaces include SPI, UART or I2C
Sensor interfaces include I2C master, SPI master, I2S, ADC and GPIO
Large on-chip memory for enhanced PVT accuracy and customer applications
Embedded processor with self-boot capability
Geofencing and lifelogging capabilities
70 ball WLBGA package with 0.4mm ball pitch
The Broadcom BCM47748 is currently sampling with customers. Evaluation kits and reference designs are also available.
XRS Corporation, a subsidiary of Omnitracs LLC and provider of mobile trucking intelligence solutions, has announced integrations with Innovative IES and Appian DirectRoute transportation management software, both from TMW.
The newly integrated solutions are in addition to existing XRS integrations with TruckMate and TMWSuite software, also from TMW, and deliver enhanced operational visibility to fleets using both XRS and TMW platforms.
The integrated XRS solutions with TMW offer tangible benefits to drivers and to back-office personnel. Fleet managers can access vehicle and driver-specific data sourced from the XRS mobile fleet management solution directly through their TMW applications.
The streamlined information delivery saves time and eliminates the need to flip from one screen to another to access data from different systems. Furthermore, the availability of driver hours of service data from the XRS electronic logging device application within the TMS itself can help fleets improve driver and tractor use, as well as ensure they are HOS-compliant.
Also, drivers can now view routing and other driver-specific information from TMW software on their mobile devices. This simplified information delivery can streamline back-office to driver communication, reduce the likelihood of error, and lead to improved driver satisfaction and enhanced customer service.
“We continue to expand our stable of integrations, so that we are able to work with all major TMS solutions in the market. Our driver-centric integration with TMW solutions delivers significant value to our shared customers. Working with our industry partners, we’re continuing to make accurate data, including critical dispatch and routing information, easily accessible and even easier to share,” said Jon Van Winkle, vice president of product management for XRS. “These integrations allow drivers to focus on driving, without being bogged down by the cumbersome — and error-prone — task of manually entering data, while ensuring dispatchers have real-time updates to keep customers happy.”
“We have a long-standing relationship with XRS and these new integrations round out the suite of combined solutions available to meet and exceed the expectations of our shared customers,” stated Brian Larwig, VP and general manager, Appian, for TMW Systems. “The integration of the XRS Trip Management application with our Appian routing and tracking solutions makes possible the automatic route import and real-time trip activity updates from XRS Mobile, to deliver added value to the fleets we serve.”
The XRS platform, which runs on certified smartphones, tablets and rugged handhelds, provides drivers with a familiar interface for day-to-day operations and compliance. There are no additional, up-front hardware costs when the certified mobile devices are already in use, allowing fleets to immediately adopt the technology.
WorkWave, a provider of cloud-based field service management and “last mile” fleet management software solutions, has unveiled WorkWave Fleet, its mobile-first flexible route planning solution.
WorkWave Fleet helps field service and transportation and logistics businesses save time and costs while increasing capacity by better managing their mobile workforce with unique mobile capabilities.
“WorkWave Fleet allows for automating the dispatching and monitoring process to help keep our service levels high, with less overhead. Real-time dispatching gives us the flexibility we need to manage a dynamic environment,” said Ryan Walter, Co-founder of The Compost Crew, a Maryland-based organization aimed at collecting organic materials from local communities to be composted and used to replenish soil.
Typical productivity improvements for businesses that adopt WorkWave Fleet include:
20% reduction in drive time
30% reduction in mileage
25% reduction in overall costs
22% increase in capacity
“WorkWave continues to help its clients by saving them time and costs, while increasing capacity and on-time performance with the rollout of WorkWave Fleet,” said Chris Sullens, president and CEO of WorkWave. “Our new cloud-based application is designed to be simple to use and deploy, making it ideal for small to medium sized fleets, yet powerful enough to be used by enterprise clients. It enables businesses to easily make competitive commitments to customers while boosting responsiveness to last minute requests thanks to advanced functionality that raises the bar for mobile workforce productivity and instantly delivers savings, ROI and allows our clients to delight their customers.”
In addition to WorkWave Fleet’s core flexible route-planning capabilities, the new solution also features:
What-if Scenarios: Drag-and-drop functionality visualizes how changes impact performance to enable rapid scheduling and smarter planning.
Mobile Execution: Automatically updates progress from drivers, logs arrival and departure times, and allows for rescheduling requests.
Intra-Day Planning: Reschedule in real-time to avoid problems, update customers with courtesy calls, integrate with your system to provide ETAs via text or dispatch another vehicle.
Dramatic improvements to user interface, schedule management and path to ROI.
Rapid Deploy: An intuitive design and user interface that allows customers to learn the application in hours and deploy almost instantly after purchasing with no expensive and time consuming professional services.
Robust API: Connect directly to your own ERP, WMS, CRM or Customer Database to receive real-time updates within your own system and automate import/export operations and changes seamlessly.
WorkWave plans additional enhancements to WorkWave Fleet in 2015, including full integration with WorkWave GPS, its cloud-based telematics solution that tracks vehicle location, monitors drive behavior, and provides instant events-based alerts from any device.
Topcon Positioning Group announces cross-platform support for the MAGNET Construct app. The no-cost app is purpose built to drive the LN-100 Layout Navigator system and was initially released for the Android market. This “out of the box productivity” is now available for Apple devices as well.
“Whether you prefer Android devices or the latest Apple iPhone, iPad, or iPod Touch hardware, the free MAGNET Construct app offers intuitive options to wirelessly connect to and drive an LN-100 for fast as-built measurements as well as graphical guidance to your design data,” said David Ahl, director of software product management.
“It’s an example of our focus to provide more options that cater to the preferences of end-users,” said Ahl. “This cross-platform compatibility of the MAGNET Construct app makes entry-level precise measurement solutions for diverse 3D layout applications even more accessible.”
MAGNET Construct also offers secure connectivity to MAGNET Enterprise web services for real-time data exchange from active project sites to and from the office.
MAGNET Construct is currently available on both the Apple App Store as well as Google Play.
Unicore has released the UB380 GPS/GLONASSS/BDS high-precision board at ION GNSS+ 2015, held this week in Tampa, Fla.
UB380 is a multi-GNSS receiver that supports GPS, GLONASS and BDS. It is based on Unicore’s mature multi-GNSS system on chip (SoC). UB380 is designed for high-precision positioning, navigation and GBAS applications.
UB380 can track GPS L1, L2, L5; GLONASS L1, L2; and BDS B1,B2, B3 (support) — the support of GPS L2P, L2C can satisfy the high-precision requirements of GBAS reference station equipment.
With the latest tri-frequency RTK engine, UB380 can process tri-frequency of BDS and GPS, and the dual-frequency of GLONASS observation data, which can significantly reduce initialization time, improve position accuracy, and enhance reliability in difficult environments such as in urban canyons and under tree canopy, as well as make long baseline RTK possible.
The UR380 GNSS receiver with UB380 inside.
UB380 is compatible with industry-standard GNSS boards in size, interfaces and electrical standards.
Features of UB380:
384 channels, support for BDS B1/B2/B3 + GPS L1/L2/L5 + GLONASS L1/L2
UNAVCO’s GAGE Facility includes more than 2,000 continuously operating GPS/GNSS reference stations around the world.
UNAVCO has selected Septentrio to be the preferred vendor of next-generation GNSS reference stations for the Geodesy Advancing Geosciences and EarthScope (GAGE) Facility. The Preferred Vendor status is valid through the duration of the GAGE Facility Cooperative Agreement with the National Science Foundation (NSF).
The selection of Septentrio was made following a rigorous competitive selection process. Under the agreement, Septentrio will supply GNSS reference stations to upgrade and expand the continuous GNSS reference station networks operated by UNAVCO.
UNAVCO is a non-profit university-governed consortium that facilitates geosciences research and education using geodesy. UNAVCO’s GAGE Facility includes more than 2,000 continuously operating GPS/GNSS reference stations around the world. UNAVCO-supported networks include EarthScope’s Plate Boundary Observatory (PBO), the Continuously Operating Caribbean GPS Observational Network (COCONet), the Trans-Boundary Land and Atmosphere Long-Term Observational and Collaboration Network (TLALOCNet) and the Polar Earth Observational Network (POLENet).
UNAVCO staff from Boulder, Colo., with three Septentrio staff near Septentrio’s headquarters in Torrance, Calif. Back row from left to right: Mo Kapila, Director of OEM Sales, Septentrio; Henry Berglund, Engineer, Development and Testing; Chuck Meertens, Director of Geodetic Data Services; Dave Mencin, Real Time GPS Manager; James Downing, Contracts and Permitting Manager; Jim Normandeau, Manager of Principal Investigator Project Support, Equipment, and Repairs; Warren Gallaher, Engineer, Development and Testing; and Neil Vancans, Vice President, Septentrio Americas. Front row from left to right: Freddy Blume, Manager, Development and Testing and Francesca Clemente, Manager, Technical Support, Septentrio. (Credit: Septentrio)
“This decision, following a highly competitive technical evaluation, is an important validation of Septentrio’s family of high-performance GNSS receivers,” said Neil Vancans, vice president, of Septentrio Americas. “Septentrio is firmly established as the preferred choice of receivers within the scientific and academic community for ionospheric observations, timing and other demanding applications, due to their superior multipath mitigation, resistance to ionospheric disturbance and in-band jamming. We look forward to working closely with UNAVCO to support its important mission of advancing geodetic science.”
“The critical technology in the new generation of reference station receivers is available in the Asterx 4 OEM boards, which also provide low and scalable power options. This technology is being extended across the full line of Septentrio products,” added Vancans.
“This Preferred Vendor relationship gives UNAVCO a unique opportunity to provide technical input during the ongoing development process of Septentrio’s next-generation PolaRx-series GNSS receivers,” said Frederick Blume, senior project manager for Development and Testing at UNAVCO.
Septentrio made the announcement during ION GNSS+, being held this week in Tampa, Fla.
Alan Cameron, GPS World editor and publisher, interviews Technical Chair Paul McBurney; at left is Program Chair Gary McGraw. Each presenter was interviewed for “The ION GNSS+ Show” following a five-minute lightning presentation. (Courtesy of ION)
Tuesday night’s Plenary Session at ION GNSS+ took attendees to space with a high-flying presentation on NASA’s planetary exploration endeavors by keynote speaker James L. Green, director of Planetary Science for NASA. He touched on most of the planets, with the July fly-by of Pluto by the New Horizons probe the climax of his talk.
Following the keynote, the ION GNSS+ program chairs shared insights on the topics to be covered at the conference in a lighthearted — and very fast-moving — format. Each presenter had only five minutes to describe their program track. Afterward, they were invited to the set of “The ION GNSS+ Show,” where moderator (and GPS World editor and publisher) Alan Cameron asked them a few questions.
This year’s conference feature panels of industry experts, policy updates, the world’s largest GNSS commercial exhibit and more than 300 technical presentations presented through both Systems and Application Tracks and Peer-Reviewed Tracks.
Program chairs who gave lightning talks before joining Alan on the couch, and their topics, were: Paul McBurney, GopherHush Corp., Mass-Market Applications; Sandra Kennedy, NovAtel, High Performance & Safety-Critical Applications; Andre Hauschild, German Aerospace Center, System Updates, Plans and Policies; Zainab Syed InvenSense, Multisensor Navigation and Applications; Olivier Julien, ENAC, Algorithms and Methods; and Grace Gao, University of Illinois at Urbana-Champaign, Advanced GNSS Technologies.
Planetary Navigation. During his keynote address, Green took the audience on a journey navigating through the solar system. He explained that NASA’s goals are to advance our knowledge of the origin and history of the solar system, discover the potential for life elsewhere, and assess what hazards humans may face in exploring space. First stop was our nearest neighbor, the Moon, which was explored in 2012 by NASA’s Gravity Recovery and Interior Laboratory (GRAIL) spacecraft. GRAIL uncovered the origin of massive invisible regions that make the moon’s gravity uneven, a phenomenon that affects the operations of lunar-orbiting spacecraft. Because of GRAIL’s findings, spacecraft on missions to other celestial bodies can navigate with greater precision in the future.
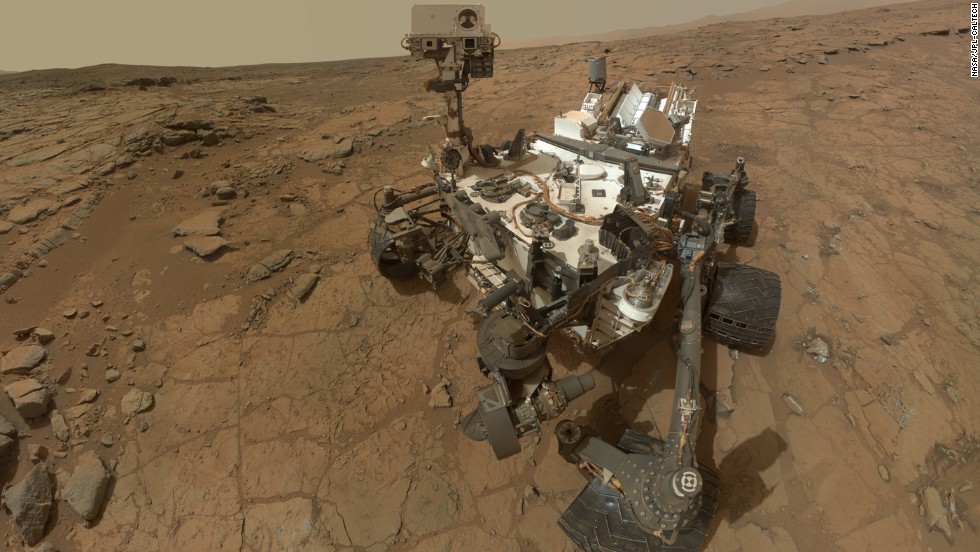
Moving on to Mars, Green shared the background and successes of the Curiosity rover, which is still on Mars researching the Red Planet. Curiosity also took a selfie.
Curiosity landed on Mars in August 2012 and took this selfie, which is an aggregate of more than a dozen separate images.
Green said Andy Weir’s novel The Martian, which has been made into a movie that will be out in October, is a realistic depiction of what exploring the hostile red planet would be like for humans.
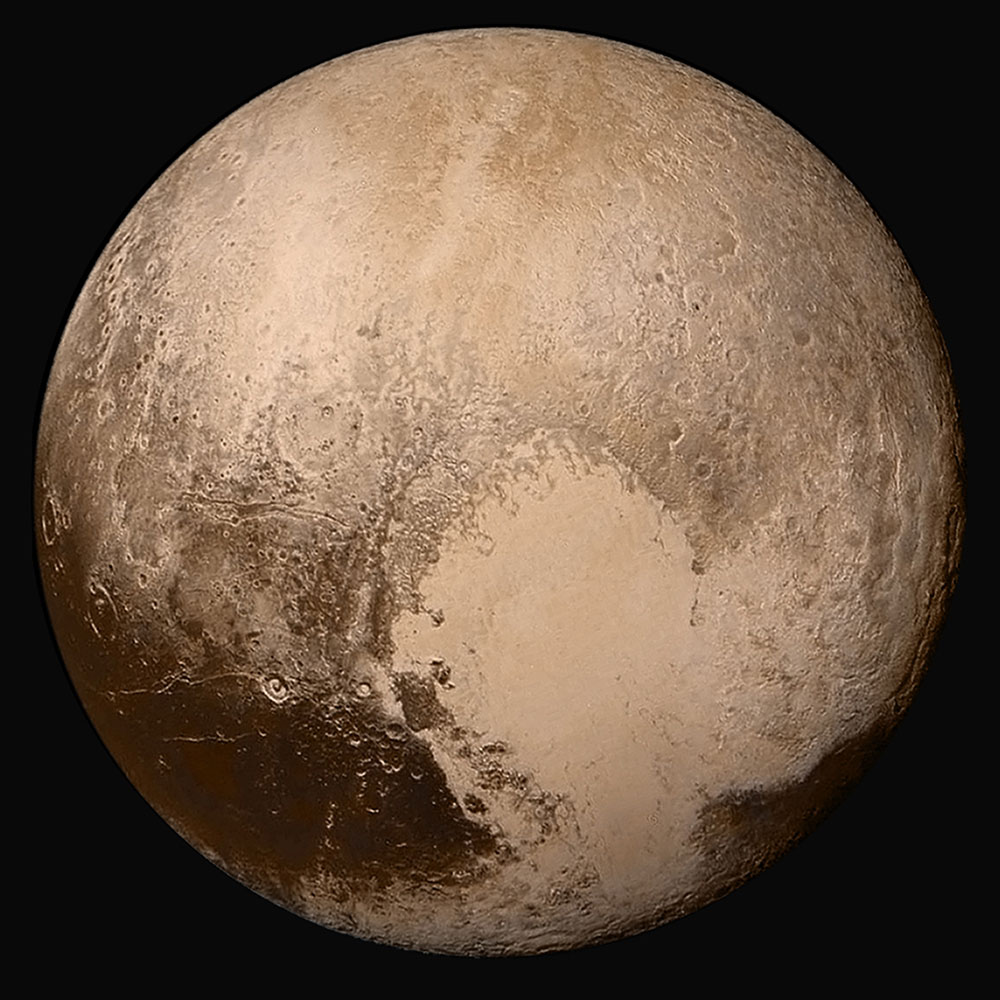
The New Horizons flyby of Pluto drew several audience questions following Green’s presentation. With an orbit of 248 years, it was a challenge to determine the precise navigation route to the Solar System’s outermost planet, especially when travel at 16 kilometers a second could spell disaster if the probe encountered any space debris — even a particle the size of a grain of sand could end the mission. Mission control constantly reassessed the spacecraft’s trajectory using imagery from the Hubble space telescope and then New Horizons itself.
NASA was surprised to find that Pluto’s surface has relatively few craters.