CartoPac International Inc. has announced a major new release of the CartoPac Mobile Platform. CartoPac 5.0 extends the mobile platform with support for Windows 8 and introduces the CartoPac Workflow Manager, which provides a structured process to manage the use of geospatial data across the enterprise.
CartoPac will demonstrate the applications and technologies of Version 5.0 in the free CartoPac Mobility Webinar Series beginning on September 30.
The CartoPac Platform is a configurable suite of field and office tools designed to maximize the productivity of crews as they digitally map, inventory and inspect critical assets using GPS-enabled mobile devices. Seamlessly integrating with the Esri ArcGIS Server, CartoPac is used extensively by oil and gas companies, pipeline operators, electric utilities, state/local governments and environmental engineering firms to populate the enterprise GIS and asset-management systems with captured infrastructure information.
The new CartoPac Workflow Manager (CWM) in CartoPac 5.0 provides organizations with a structured workflow to view, edit, validate and approve asset data as it moves from the field back into the enterprise. CWM ensures that individuals responsible for data are notified as it comes into the organization so they can incorporate the data into systems related to work-order fulfillment, risk analysis, integrity modeling and other asset management processes.
CartoPac developed CWM for the management of heavily regulated assets in the field, such as gas pipelines and electric distribution infrastructure. A module within the CartoPac Server, the CWM extension creates an audit trail of all the edits and modifications made to the data sets that represent the monitoring and maintenance of real world assets in the field.
“CartoPac Workflow Manager fills the gap between data collection and enterprise asset management systems to enable organizations to maximize the value of their data,” said CartoPac CIO Scott Crouch. “CWM enables organizations to show regulators they have a structured process for tracking and responding to the conditions of their critical assets and has proven to be key component for assisting companies with their regulatory compliance and integrity management programs.”
Further expanding the capabilities of the CartoPac mobile components, version 5.0 has been optimized for the Windows 8 operating system running on standard GPS-enabled laptop computers and tablet devices. This migration means that crews can use CartoPac to collect and manage asset data in the field on the same hardware devices they will use back in the office to run their daily business applications.
“The attractive cost, integration with GPS and expanded performance of Windows 8 tablets and laptops will enable organizations to put more personnel into the field, ensuring that vital infrastructure is mapped, inventoried and properly managed,” said Crouch “Laptop/tablet-equipped maintenance personnel in the field will now be able to run CartoPac solutions on the hardware they already use for tracking repairs and closing work orders.”
To demonstrate the advantages of enterprise asset management, CartoPac has launched the CartoPac Mobility Webinar Series, which will feature applications by electric and gas utilities and highlight new mobile technologies. The first webinar, “Applying New Mobile Technologies to Electric Utility Inspections,” will be presented with EDM International Inc., a Colorado electric utility services company.
The free “Applying New Mobile Technologies to Electric Utility Inspections” webinar will be held on September 30, 2014, at 4:00 pm Eastern Time. To register, click here.
Abstract submissions are now being accepted for The Institute of Navigation’s (ION) Pacific PNT Conference, to be held April 20-23, 2015, at the Waikiki Beach Marriott, Honolulu, Hawaii. Abstracts are due November 14, 2014.
Pacific PNT, where “East Meets West in the Global Cooperative Development of Positioning, Navigation and Timing Technology,” brings together policy and technical leaders from Japan, Singapore, China, South Korea, Australia, the United States, and more for policy updates, program status and technical exchange.
“Global cooperative interoperability” will frame the technical program. Leaders representing academia, government, industry and the scientific community will convene to solve PNT challenges that impact Pacific Rim development.
Pacific PNT 2015 is organized by a Pacific Rim advisory board and will feature technical papers presented on a diverse array of topics including:
Aircraft Navigation and Surveillance
Agricultural, Construction and Mining
Algorithms and Methods
Alternative Navigation and Signals of Opportunity
Aviation Applications of GNSS
Challenging Navigation Problems
Collaborative Navigation Topics
Earthquake & Tsunami Prediction and Monitoring with GNSS
GNSS Augmentations
GNSS Correction and Monitoring Networks
GNSS Environmental Monitoring
GNSS Policy/Status Updates
GNSS Signal Structures
Inertial Navigation Technology and Applications
Interference and Spectrum
Ionosphere Monitoring with GNSS
Magnetic Field Navigation and Mapping
Maritime Navigation
Nature-Inspired Navigation
PNT and Automobile Safety
PNT and Social Media
PNT for Domestic and Healthcare Applications
Precision Agriculture and Machine Control
Time and Frequency Distribution
UAS Technologies
Abstracts are being accepted through November 14, 2014. For more information the ION’s Pacific PNT 2015, visit www.ion.org/pnt.
PTTI 2014 Registration Opens
Registration is now open for the ION Precise Time & Time Interval Meeting (PTTI) 2014 to be held December 1-4 at the Seaport Boston Hotel, Boston, Massachusetts. The technical program is available online.
The annual PTTI conference has a technical program designed to disseminate and coordinate PTTI information at the user level; review present and future PTTI requirements; inform government and industry engineers, technicians, and managers of precise time and frequency technology and its problems; and provide an opportunity for an active exchange of new technology associated with PTTI.
The Distinguished PTTI Service Award, which recognizes outstanding contributions related to the management of PTTI systems, will be presented on Thursday, December 4.
GPS World’s 25th Anniversary GNSS History Timeline, from the September 2014 Special Supplement “GNSS Industry: Past, Present, and Future.” Download the PDF.
This integrated circuit supports simultaneous reception and processing of the GPS L1/L5, Galileo E1/E5a, and GLONASS G1 signals with 40 tracking channels. The dual-band analog RF front-end is integrated on the same mixed-signal chip as the baseband hardware, including an embedded processor to close the tracking loops: overall, a compact, low-power, and low-cost solution.
By Fabio Garzia, Stefan Köhler, Santiago Urquijo, Philipp Neumaier,Jörn Driesen, Sybille Haas, Thomas Leineweber, Tao Zhang, Sascha Krause, Frank Henkel,Alexander Rügamer, Matthias Overbeck, and Günther Rohmer
Multi-constellation multi-band global navigation satellite system (GNSS) receivers can efficiently exploit the advantages derived from the modernization of existing GNSS constellations, such as GPS and GLONASS, as well as from the launch of new ones like Galileo and BeiDou. Utilizing multiple systems can significantly improve the availability of a navigation solution in urban canyons and heavily shadowed areas. Increased satellite availability also guarantees higher measurement redundancy and improved reliability. Moreover, the excellent inherent noise and multipath mitigation capabilities of the new and modernized wideband signals in the L5/E5a band, combined with the ionosphere error mitigation given by frequency diversity, significantly improves the accuracy in both measurement and position domains.
Still, most commercial fully-integrated single-chip mass market GNSS receivers use only a single-frequency band for their positioning, velocity, time (PVT) solution: either GPS L1 C/A or Galileo E1 and GLONASS G1. For example, the Teseo chips are single-chip solutions that support multiple constellations but only on one frequency band. This approach reduces design costs and enables the lowest consumption of power, but neglects the advantages of wideband signal processing – which offers increased robustness thanks to two simultaneous frequency band receptions and the capability of mitigating the ionosphere error.
Another approach for realizing multi-constellation multi-frequency solutions is to combine different chips for the analog front-end and the digital baseband. One fully integrated single-chip analog multi-band front-end for the simultaneous reception of GPS L1/L5, Galileo E1/E5, and GLONASS has been presented. However, this chip included only the front-end and requires an additional, separate digital-baseband solution.
The purpose of the NAPA project (NAvigation chip for Pedestrian navigation and higher precision Applications) is to close this gap by providing a fully integrated, compact, low-power, and low-cost solution in which the analog and digital parts of the GNSS receiver are integrated together on the same chip. The NAPA receiver offers all the advantages of multi-constellation reception with additional dual-frequency support.
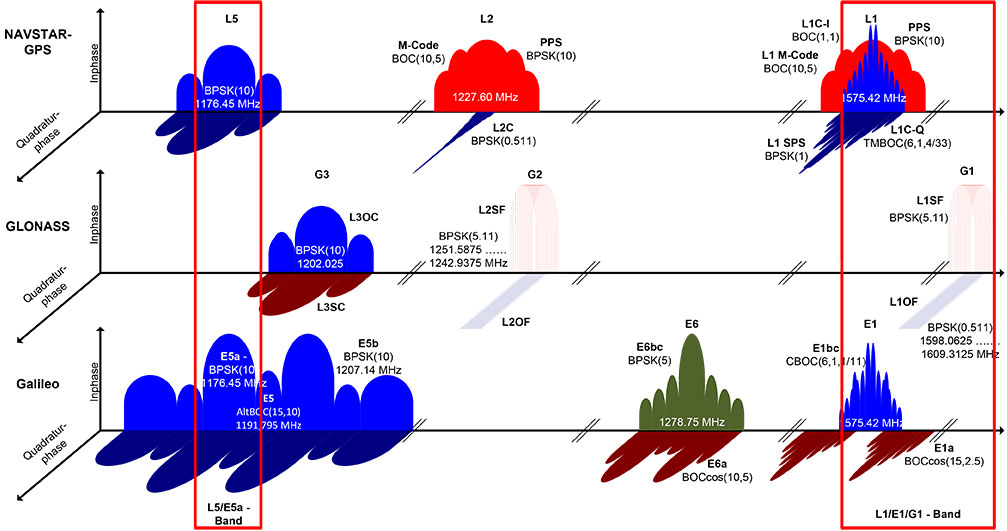
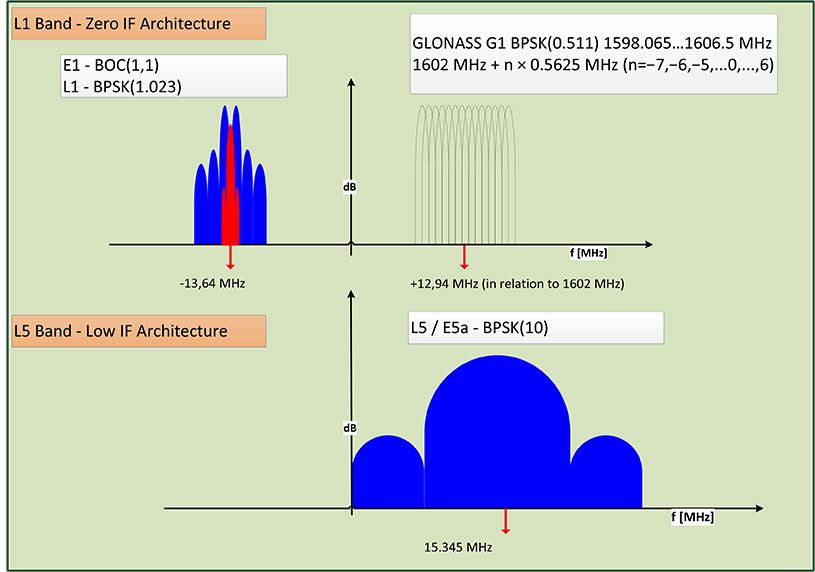
The NAPA chip features a monolithic, single mixed-signal chip implementation of a multi-system, multi-band analog front-end and the related digital baseband core, including an embedded processor. The NAPA chip can be used as a stand-alone GNSS sensor, because no additional components are required to obtain a PVT solution. The ASIC was implemented in a low-power technology and adopts some ad-hoc low-power architectural features. In regard to costs, an ASIC solution is more convenient than FPGA, provided the non-recurring engineering costs (NRE) are amortized by the amount of chips manufactured and sold. The NAPA chip supports multi-system (GPS, Galileo, and GLONASS) and multi-band (GPS/Galileo L1/E1, L5/E5a, GLONASS G1) processing. Figure 1 shows the frequency band being selected for receiving and processing in the NAPA chip. With two fully deployed GNSS — GPS and GLONASS — NAPA chips can already be used in many commercial applications. Thanks to the spectral overlay of the GPS L1/L5 and Galileo E1/E5a signals, the chip is also ready for Galileo. The frequency selection features both the narrow-band legacy signals L1/G1, which can be used for fast acquisition. For highest tracking accuracy, the wideband GPS L5 and Galileo E5a BPSK(10) modulated signals can be utilized.
Figure 1. GNSS signals received and processed by the NAPA chip.
The higher accuracy is obtained primarily by the attenuation of the ionospheric error. The ionosphere is a dispersing media that can introduce a bias error between 1 and 20 m. Forming a linear combination of two independent frequency-band measurements, the ionospheric bias can be measured and almost completely removed. In addition, Precise Point Positioning and Wide/Narrow-laning combinations are possible, thanks to the second received frequency band. The first allows for the combination of precise satellite positions and clocks with multi-frequency measurements, providing cm/dm solutions. The second adopts fast ambiguity solutions for carrier-phase positioning and cycle-slip detection.
In this article, we present the NAPA chip in detail. We describe the architecture of the analog front-end and its digital counterpart and the innovative features of each. Then we provide details about chip implementation, manufacturing, and test setup. Finally, we present the first verification results and draw conclusions.
Architecture Overview
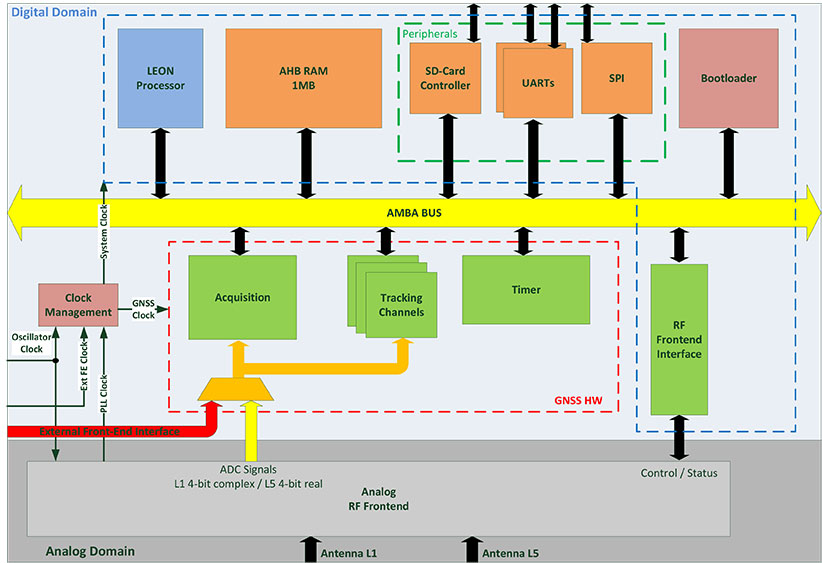
The NAPA chip architecture, depicted in Figure 2, is composed of two separate blocks integrated on the same silicon die: the analog core provides the functionality of a two-frequency radio-frequency (RF) front-end, whereas the digital part implements the main GNSS processing tasks, including the correlator channels and an embedded processor, and takes care of the RF front-end control. The interface between the two blocks is completely digital and provides synchronizers to ensure a valid clock domain crossing (CDC).
Figure 2. Overall NAPA architecture with emphasis on the digital core blocks.
Analog Front-End. The analog RF front-end supports the simultaneous reception of GPS L5 / Galileo E5a and GPS L1 / Galileo E1 / GLONASS G1 signals as well as modes where only one reception path is activated.
Both passive and active GNSS antennas are supported, thanks to integrated low noise amplifiers (LNA). There are two separate signal reception paths for the two frequency bands. The L1/E1/G1 path is characterized by a quasi-zero-IF conversion that mixes the middle frequency between L1/E1 and G1 to zero frequency. The L1/E1 reception bandwidth is up to 14 MHz so as to incorporate the MBOC modulations of Galileo E1 and future GPS L1C signals. A programmable automatic gain control (AGC) controls the complex analog baseband signals before they are digitized with a 4-bit dual-channel analog digital converter (ADC).
The second reception path receives an L5/E5a signal with up to 20 MHz bandwidth for the BPSK(10) modulated signals. This path uses a low-IF architecture. The signal is down-converted to an intermediate frequency (IF) of 15.345 MHz. The image frequency is suppressed by a polyphase filter. The real-valued analog signal is controlled by an AGC and converted to the digital domain using a single 4-bit ADC. A common phase locked loop (PLL) is used with specific L1/E1/G1 and L5/E5a dividers to generate the mixers’ local oscillator (LO) frequencies. The PLL loop filter is integrated on-chip to minimize external elements. Moreover, automatic filter and voltage-controlled oscillator (VCO) calibrations are included to mitigate process tolerances. The PLL can handle input clock frequencies between 10 and 80 MHz with a recommended clock frequency of 36.115 MHz.
An SPI core was implemented on the front-end part to facilitate control of the different front-end features. This means it is possible to tune the PLL, to switch off a complete front-end path if the second frequency band is not used and to activate different on-chip calibration procedures.
The frequency plan of the front-end is depicted in Figure 3. Due to the quasi zero-IF architecture, the complex L1/E1 baseband signal is located on an IF of -13.64 MHz and the GLONASS G1 frequency division multiple access (FDMA) signals on an IF of +12.94 MHz, with respect to the GLONASS G1 center frequency of 1602 MHz. The real-valued L5/E5a signals are provided by the second ADC and located on an IF of 15.345 MHz.
Figure 3. RF front-end frequency plan.
The ADC samples are generated with a frequency of 74.4871875 MHz for both the single channel L5, as well as for the dual-channel L1/E1/G1 ADCs. The ADC clock is also directly connected to the baseband digital core and is used as the main clock for the GNSS hardware modules. The embedded processor in the digital core receives a second clock, which is twice as fast as the GNSS hardware one.
Digital Baseband SoC. The baseband is characterized by a system-on-chip (SoC) architecture based on a SPARC-compatible 32-bit LEON2 microprocessor running at approximately 150 MHz. The GNSS functionality, including acquisition and tracking, are implemented using dedicated hardware modules.
The processor’s primary functions are to correctly configure the RF front-end and control the different parts of the receiver. In particular, it triggers acquisition, initializes, and starts the tracking channels with the signals detected during acquisition and takes care of closing the frequency/phase/delay locked loops (FLL/PLL/DLL) used for signal tracking. The tracking loops have strict real-time constraints; communication between the channels and the processor features a high-speed infrastructure.
Structurally, the processor is connected to a hierarchical on-chip Advanced Microcontroller Bus Architecture (AMBA) composed of a high-performance bus (AHB) and a peripheral bus (APB). The AHB provides a direct connection between the processor, the real-time GNSS modules, and the system memory, a monolithic 1 MByte block that hosts the main program at run-time. Different programs can be loaded if needed by using the external SD-card interface.
In addition to the processor, there are four additional AHB masters: the bootloader, the SD-card controller, the real-time GNSS modules, and the on-chip processor debugger. The bootloader is in charge of the bus control at system start-up. The SD-card controller has integrated direct-memory access (DMA) capabilities to move data between the SD card and the system memory. The real-time GNSS modules can write the tracking results directly to the system memory. Finally, the integrated processor debugger allows real-time debugging and is used mainly in the verification phase. The APB provides a connection to generic peripherals, and control and status interface of the GNSS modules without real-time constraints, as well as the control and status interface of the RF front-end. Since the GNSS modules operate in a separate clock domain that runs at half the frequency of the processor domain, some synchronization logic is necessary to ensure correct CDC.
The adoption of an SoC architecture provides higher flexibility than conventional static hardware solutions. In addition to typical GNSS applications, the user can also implement some signal monitoring and processing algorithms in software. The eCos-embedded operating system is provided to ease software development.
Generic Peripherals. The digital core is equipped with several peripherals that enable the communication with the outside world. The two separate universal asynchronous receiver/transmitter (UART) interfaces can run at 115.2 kbps. A dedicated serial peripheral interface (SPI) master is also provided with a maximum of 10-MHz clock frequency. For example, these interfaces can be used to provide NMEA data to some external display device or raw data (pseudoranges, code phases) in order to calculate a PVT solution. It is also possible to directly access the measurements generated from the correlator hardware and to control the tracking NCOs, which means users can choose their own algorithms for the loop closure. A possible application is the realization of vector-delay tracking using the NAPA ASIC and an external processor.
The SD-card interface facilitates the loading and storage of large amounts of data, for example, memory codes and almanacs. The possibility of making signal snapshots periodically and saving them to an SD card for later analysis has also been foreseen. This could be useful in special applications in which the receiver hardware is not accessible to the user all of the time.
In addition, 10 general-purpose I/O pins (GPIO) are provided. They can be controlled via software and can provide a very basic interface (for example, to connect to external LEDs or switches).
Acquisition Module. The acquisition module adopts a parallel code phase search in the Fourier domain by using a 16-k Samples Fast Fourier Transform (FFT) core. The adopted algorithm is known as parallel code-phase search.
The L1/E1/G1 signals coming from the front-end are first filtered and then sent to the acquisition module to allow a fast detection of the satellites in the L1/E1/G1 bands with their respective code delays and Doppler frequencies. The acquisition of GLONASS G1 FDMA signals is possible thanks to a software-configurable hardware mixer that can be set with the different G1 carrier frequencies. No direct hardware acquisition is supported for the L5/E5a band signals. The tracking of L5/E5a band signals is possible by performing a hand-over from L1/E1 band or a Tong search using the tracking channels.
The acquisition process is performed iteratively over all the possible satellites and over a set of Doppler values. These values are obtained by dividing the complete range of possible Doppler variations into bins. The smaller these bins are, the more accurate the acquisition result, but the more time is required to complete the entire process.
The acquisition has an additional layer of configurability because of the adoption of coherent and incoherent accumulations. These accumulations are supported in hardware but are completely software-controlled. This provides another possibility for achieving higher accuracy, but at the cost of a larger execution time due to an increase in the amount of accumulations.
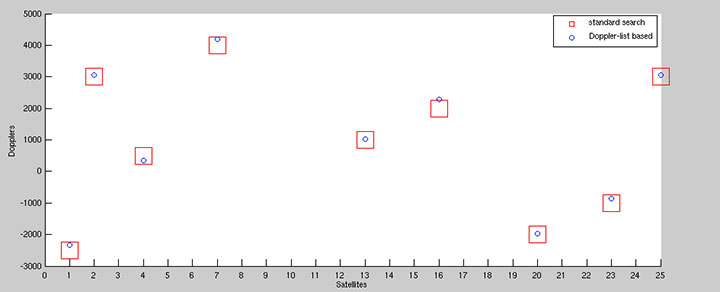
To speed up acquisition, we introduced a dedicated logic based on a novel patented algorithm. With this algorithm, we are able to detect the Doppler of the L1/E1 satellites present in the signal with an accuracy of 2 Hz. By performing this Doppler search step before the actual acquisition, we are able to generate a list with Doppler values that can be used instead of the bins. This gives more accurate results thanks to the algorithm’s inherent accuracy (see Figure 4) and allows a reduction in the acquisition time since the amount of Doppler values are usually smaller than the bins. Another advantage of this algorithm is the possibility to detect the transition to an indoor context (such as where there is a lack of satellite signals) by simply looking at the Doppler list, without performing any acquisition.
Figure 4. Comparison between standard and Doppler-list based acquisition of an L1 signal.
A single iteration step for the acquisition of a GPS L1 signal requires no more than 1 ms for each accumulated epoch. To achieve a good compromise between accuracy and speed, we typically use four epochs of incoherent accumulation, which means approximately 4 ms execution time. For Galileo L1 with four incoherent accumulations, an iteration step takes approximately 16 ms. This time has to be multiplied by the number of satellites and bins to estimate the execution time of the complete process.
Integrated Acquisition Memories. The acquisition module is characterized by dedicated memory blocks used for the fast FFT processing. It also provides the possibility to use these on-chip memories to store a snapshot of the incoming signals. In particular, we can store up to 81,920 samples of raw data for the complex L1 and real L5 IF signals for further analysis or processing, even off-chip. This enables sophisticated spoofing detection methods, for example, as well as interferer detection and characterization methods. Spoofing detection can be implemented by monitoring the 2D-acquisition search space. Interferer detection and characterization can employ short-time Fourier transforms (STFT) on the snapshot.
Using the chip as a simple snapshot receiver without having to use the on-chip dedicated GNSS hardware is also a possibilty. For this purpose, the integrated peripherals like UART and SPI ports are provided as interfaces.
Tracking Module. The 40 versatile tracking channels can be mapped to any combination of GPS, Galileo, and GLONASS signals on the two reception bands. One possible combination would be to track 10 GPS and 10 Galileo satellites simultaneously on both L1/E1 and L5/E5a bands. Alternatively, the user can include GLONASS signals by using fewer GPS / Galileo combinations. The assignment of these tracking channels to the actual GNSS signals can be changed at run-time in order to adapt to different reception situations or to assist the selected signal processing methods.
Each channel is characterized by a five-tap correlator. For the BPSK modulated signals without side peaks, such as GPS L1/L5, Galileo E5a, and GLONASS G1, we use only three values (early, late, and prompt). For Galileo E1 BOC(1,1) signals, five values are foreseen (very early and very late in addition to the previous), so that false peak lock conditions can be detected and a bump-jumping algorithm can be applied. The switch between these modes can be done at run-time and determines the amount of correlation values to be exchanged between correlators and processor.
Low-Power Features. The GNSS modules operate in their own clock domain. This clock domain is divided in clock-gated regions. There is a common region for the bus interfaces, one region for the acquisition, and one for each tracking channel. This allows a fine-grain shut-down of the GNSS modules that are not currently in use. For example, the acquisition can be deactivated when there are enough signals in tracking or the unused tracking channels can be disabled. This allows a reduced power consumption for the idle modules. This activation/deactivation procedure is controlled through a set of registers connected to the APB and is performed via software.
External Front-End Interface. To allow for more flexibility, we provided an additional RF front-end interface. The interface is also depicted in Figure 3. This interface features one 2-bit complex and an additional 2-bit real input, as well as a clock input. The user can decide to directly connect the digital baseband core to an external RF front-end with compatible sampling rate parameters, and exclude the on-chip RF front-end. This makes it possible to use the NAPA chip for validating other RF front-end devices, or it can be adapted to special customer needs.
Boot-Up Sequence. The SoC includes a hard-coded bootloader that is in charge of the bus control at start-up. In this phase, the processor is switched off. The bootloader loads a 24-kByte program from the SD-card to the system memory and starts the processor. In this phase, the processor runs with the external oscillator clock. Having performed the RF front-end initialization, the processor can switch to the front-end PLL generated processor clock that runs at approximately 150 MHz. This switch is completely transparent to the processor. Then the actual main GNSS receiver program is loaded into the system memory and executed.
The NAPA Chip
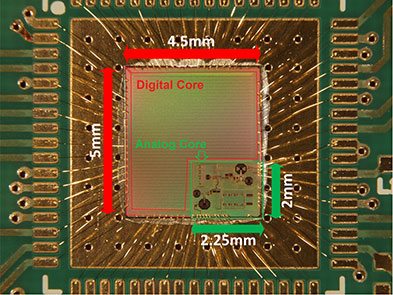
The NAPA chip has been manufactured in a low-power 1.2 V 65 nm TSMC technology. The 4.5 mm x 5.0 mm chip die was mounted in a QFN68 package; first test samples are available. The core requires a 1.2 V power supply, the pads 1.8 V. Figure 5 shows a picture of the die and its interconnections. The two parts, the analog core and the digital baseband, are clearly distinguishable. The chip is currently in the verification phase.
Figure 5. NAPA chip.
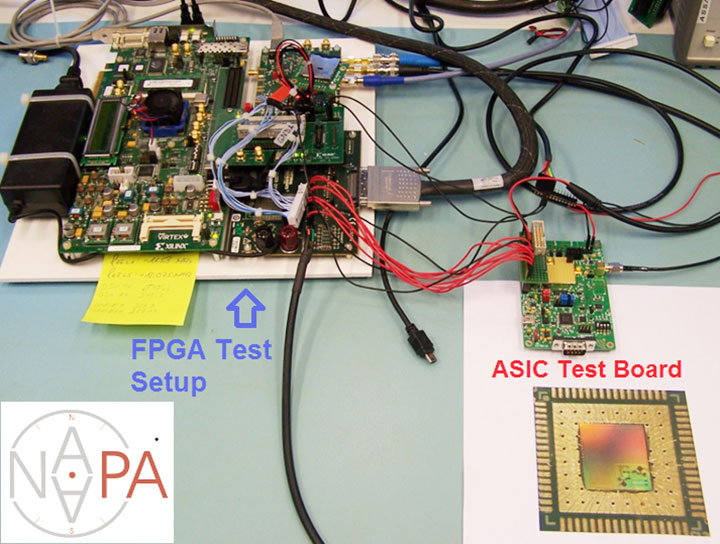
Within the project, the development and testing of the NAPA design was carried out on basically two platforms. During the hardware development phase, the baseband core has been prototyped on a FPGA device and tested using a special file-player setup, as explained in the following section. Having taped out the chip and received the first samples from the foundry, a test board has been developed in order to verify NAPA chip functionality.
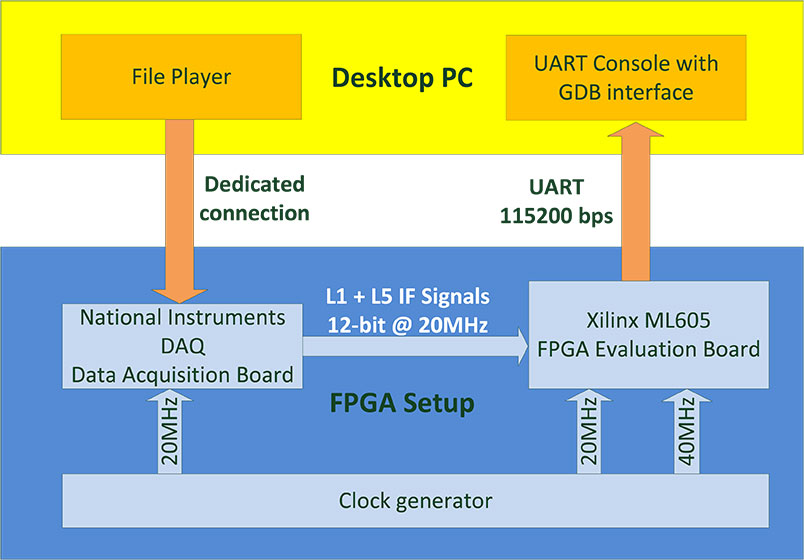
FPGA Test Setup. In the development phase, the NAPA baseband core has been implemented on a Xilinx Virtex6 FPGA device. A Xilinx ML605 development board has been used for the test setup. The main limitation of the testing in this phase was the lack of an analog RF front-end prototype. In order to make early testing of GNSS functionality possible, we adopted a file player developed by Fraunhofer IIS in a previous project. This file player uses a desktop PC to reproduce a digital signal data-stream stored in a binary file on the PC. The stream is sent through a dedicated interface to a commercial digital acquisition board. This board receives a clock synchronized with the baseband core’s clock in the FPGA and delivers the signals directly to the FPGA pins. The complete setup is depicted in Figure 6. The setup in use can be seen on the left part of the opening figure.
Figure 6. FPGA test setup.
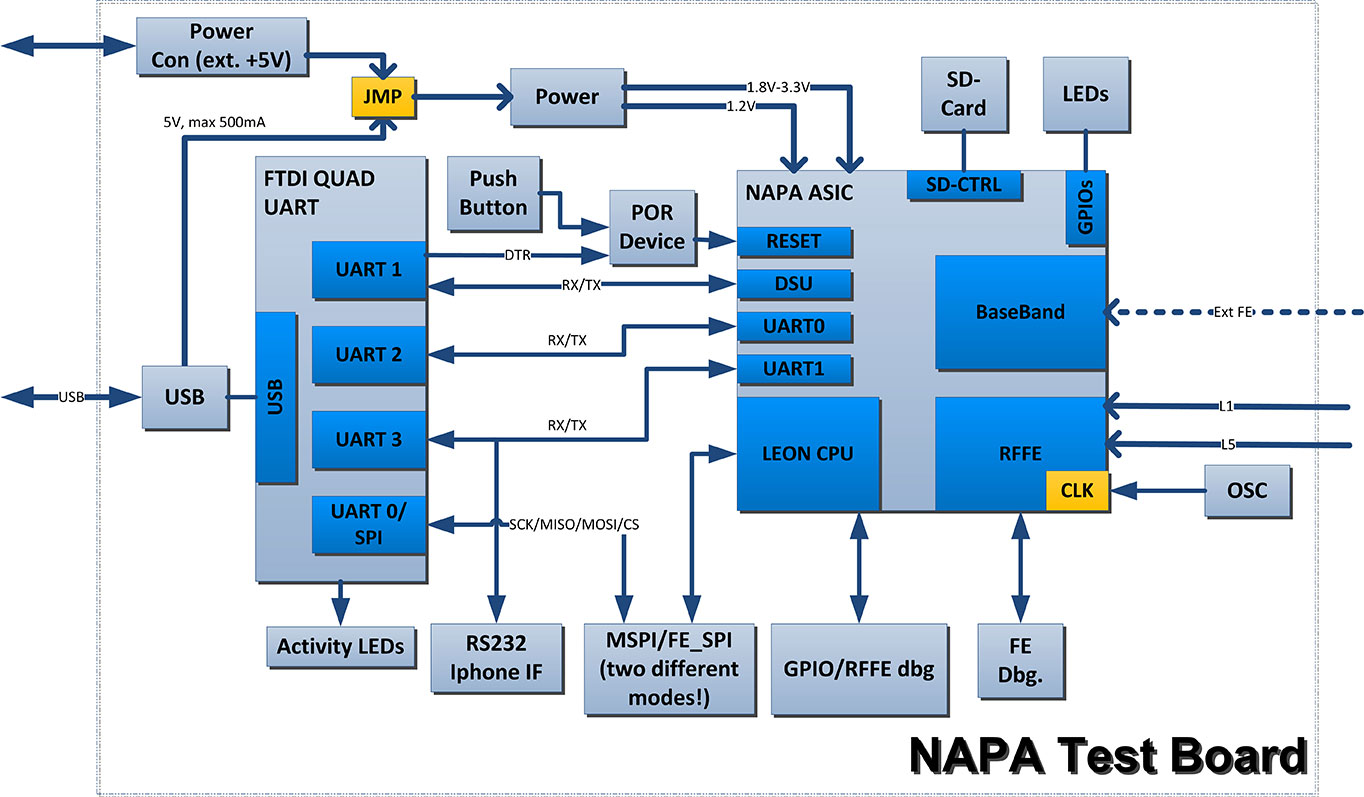
Test Board. In the verification phase, which is currently ongoing, the first unpackaged test chip dies have been glued directly to the test PCB and bonded on board without any housing. After receiving the packaged chips, the QFN68 could be regularly soldered on the PCB. A block diagram of the board is depicted in Figure 7. The board hosts the typical switch buttons and LEDs for quick control and status detection as well as some specific interfaces. The clock can be provided through a dedicated SMA clock connector as well as a discrete oscillator. Two sub-miniature push-on (SMP) connectors are also provided for separate the L1 and L5 antenna inputs. The two UART ports, the debugger UART, and the SPI master port are connected using a FTDI chip. This chip allows the simultaneous connection of these ports to a desktop PC’s USB port. A parallel connector is provided to interface external front-end ADC signals and clock. The GPIOs are accessible through the same connector. A dedicated socket is added for a mini-SD card.
Figure 7. Block diagram of NAPA test board.
Preliminary Results
The chip on the test board was first tested using the same file player of the FPGA setup. This way, we could evaluate the correct functionality of the digital baseband core without the need to activate and configure the on-chip front-end. After the successful tests, we focused on the on-chip front-end configuration, and we used the antenna connectors to provide valid GNSS signals. We tested the chip using three different configurations: a GNSS signal simulator, a static roof antenna, and a small active patch antenna.
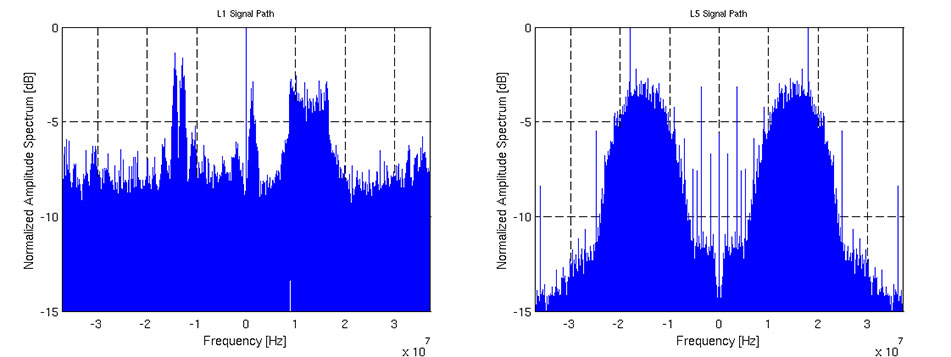
In the three configurations, we successfully acquired GPS L1 and Galileo E1 signals. We were also able to perform tracking on GPS L1 and L5I, as well as Galileo E1b and E5aI. Figure 8 shows the spectrum of a snapshot of L1 and L5 paths made using the on-chip dedicated snapshot hardware and sent through the UART port with a dedicated binary protocol for offline processing. For this special test, we used an arbitrary waveform generator to provide noiseless Galileo and GLONASS signals in the L1 and L5 frequency bands, supported by the NAPA chip. After performing a FFT of the two snapshots, we can clearly see these signals. In the L1 plot, the E1b signal is present in the negative frequency range with the two peaks typical of the BOC(1,1) modulation. The FDMA GLONASS G1 is in the positive frequency range with its trapezoidal characteristic. It is also possible to see a side lobe of the E1a BOCcos(15,2.5) in the proximity of the zero frequency. In the L5 plot, we can see the main peak of BPSK E5a signal on the right and its mirrored image on the left, due to the fact that L5 signal path is real.
Figure 8. Spectrum of L1 and L5 band showing a Galileo E1 and E5a signal.
Acknowledgment
This project has been funded by the Bundesministerium für Bildung und Forschung (BMBF) (German Federal Ministry of Education and Research), which is gratefully acknowledged.
Actions Necessary to Reduce Vulnerability and Ensure Availability
By Brad Parkinson
(From the 25th Anniversary GNSS History Special Supplement)
Introduction
Brad Parkinson
About 40 years ago, we had a vision for positioning, navigation, and timing (PNT). That vision was more than successful, and became known as GPS. In some respects we have been almost too successful: PNT is frequently taken for granted. PNT, in the form of GPS, has become a powerful worldwide enabler for productivity and for safety. Estimated yearly value runs to many tens of billions of dollars.
For several years, I have been concerned about comments that denigrate GPS because the signal strength is relatively weak. The speakers have gone on to say it can be completely replaced with inertial or other techniques. Recently, comments by government officials further energized me to look at the full picture.
What can we do to reduce the vulnerability and ensure that the expectations of the users are going to be met? I summarize my solution as the PTA program and will elaborate in this article. At a top level, the term PTA means: Protect, Toughen, and Augment GPS to assure PNT. Note I say PNT, not GPS. The central issue is assuring access of PNT to the user, not the source of the information. I strongly believe that PTA is both achievable and absolutely necessary. Protecting PNT is particularly important to Europeans as they are just about to launch their fledgling Galileo system.
Speeches and travel only reach a limited number. When GPS World invited me to write a piece for the magazine’s 25th anniversary issue, it seemed an ideal opportunity to expand knowledge of the PTA program. The following is an edited form of a talk I have given a number of times, most recently at the European Navigation Conference in Rotterdam in April 2014.
GNSS initiatives and the GNSS community are growing rapidly, and certainly we are very enthusiastic about the progress of Galileo. But some places in the U.S. community are saying, “Well, this GPS band is underutilized; devoting all that bandwidth to a single system is not prudent.”
I beg to differ with that view. If you look at the separate signals in the L1 band around the world, by the year 2023 they will grow to be well more than 400 individual signals. Those signals service over 2 billion users, from emergency service providers to precision agriculture to crustal monitoring and many, many more. I have an entirely separate talk on “GPS for Humanity,” but that is not our subject today.
Calling the GPS frequency band “underutilized” simply points out ignorance, even among our supporters. For example, we say PNT to emphasize that GNSS provides four dimensions. Certainly, timing is the forgotten fourth dimension of GPS, and even our politician friends rarely understand the importance of this aspect. Yet we know that highly accurate timing, supplied by GPS, is absolutely critical for power distribution, for telecommunications, and for the financial sector.
It is instructive to summarize the penetration of the PNT “Stealth Utility” into the fabric of our society.
Market Size. Overall, GPS has more than 2 billion users worldwide. This represents a very diverse user group; we providers are continually seeing new and innovative ways to use GPS.
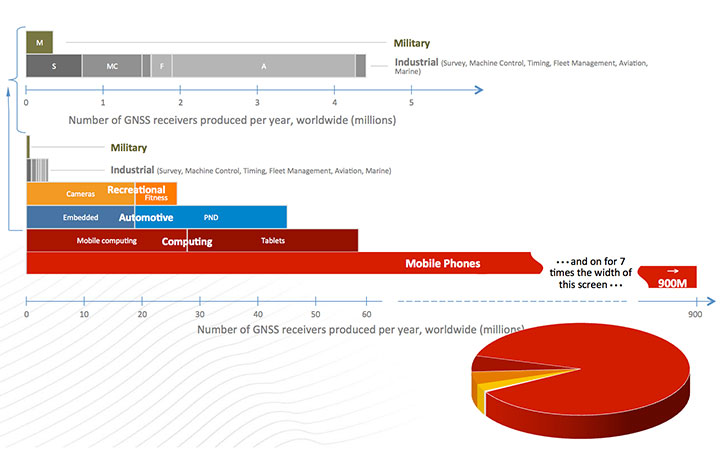
Figure 1, for which I am indebted to Frank van Diggelen, gives an estimate of the number of receivers currently fielded. Notice the number of military receivers: less than half a million. The gray bar depicts the industrial uses such as survey and machine control, which come in at about 4.5 million; these tend to be extremely high enhancers of industrial productivity.
Figure 1. GNSS market size, 2012.
We have to change the chart scale to depict bigger market segments. For example, recreation, automotive, and computing are shown on the lower half of the chart. In fact, mobile phones will still not fit on the chart. Attesting to the size of the estimated mobile phone base: one company alone will produce more than 900 million GPS-equipped smartphones this year. The pie diagram shows the dominance of mobile devices, but much higher productivity gains come from high-precision devices whose impact is very disproportionate to numbers of receivers.
We asked some economists, just what is all this worth? They looked at a subset of all the industries and concluded that GPS has a positive net effect to the tune of at least $32 billion annually. They had an expanded study that suggested about $90 billion annually. So, for those who question the value of GPS, the answer is that the net yearly returns to our national investment are more than 1000 percent. (Note: National investment is about $3 billion annually.)
To ensure these enormous economic benefits of PNT, there are two fundamental needs, and we providers must assure that they are met. The first and most important need is availability.
Availability. When we say availability, it is defined in a certain way; it means that PNT is available at the application-specified accuracy. We usually measure that accuracy at the 90th percentile: only 10 percent of the time can that error be exceeded.
Integrity. The second user need is the required integrity. That means that when the user expects a specific accuracy, the system is not lying to him. Integrity assurance is very much a focus of both the International Civil Aviation Organization (ICAO) and, in the United States, the Federal Aviation Administration (FAA). In many cases they require that PNT errors not exceed specified bounds more than once in 10 billion measurements (1 x 10-7). This integrity level requires so many samples, it is virtually impossible to verify experimentally; we have not had that many airplane landings, but it can be calculated. The metric we use is how many minutes GPS is not available — unavailability — at the specified accuracy and integrity. That is more easily understood than availability that aproaches 99.9XXX percent. The usual goal is that unavailability be zero.
We have an independent assessment of how well we are doing: FAA’s Wide Area Augmentation System (WAAS). They put out a report card with a lot of numbers. GPS clearly deserves a grade of A+.
And it will get better. The U.S. government’s PNT Advisory Board, which I co-chair, recently advocated that the full navigation message be added at the new civil frequencies, the L2C and L5C signals. The Air Force has now complied, thanks to strong support from General Willie Shelton. This makes two more civil signals fully available. They currently expect 2.9 meter ranging accuracy, but by the end of the year the Air Force operators expect the same full accuracy as the rest of the signals, on the order of 0.5 meter of ranging error.
This is an outstanding picture.
So What’s the Problem? A statement made by a high-level U.S. government official in my presence exemplifies the problem: “GPS is much too vulnerable. We must replace it with new inertials and chip-scale atomic clocks.”
I found this statement appalling. Unfortunately, it was a meeting where you don’t normally speak up, and I didn’t. Nonetheless, to me, that was totally wrong.
GPS indeed has a very weak signal, and it depends on having clear line-of-sight to four satellites. But in my opinion, a much better statement is what I call the PTA solution. Our goal should be to:
Protect the system and the signal.
Toughen the receiver and the system.
Augment GPS as needed to ensure users’ PNT requirements are met.
The focus is ensuring positioning, navigation, and timing (PNT), not merely ensuring GPS.
Fundamental Prerequisites for PNT
The first prerequisite for GPS-based PNT is a receivable, clear, and truthful(truthful implies full integrity) ranging signal. There are five main challenges to this.
Too-powerful authorized signalsnearby. This aspect snuck up on our community. The FCC authorizers were about to license a powerful signal in the frequency band adjacent to GPS, drowning out any hope of receiving the GPS signal. This can be called the authorized jammer. All PNT providers must be very vigilant about this; we have seen ignorant elements of the government poised to do great harm with well-intended but destructive actions, without knowledge of the unintended consequences.
Natural Interference. This interference, the cause of delays and attenuation, is reasonably well understood, and the subject of much research, dating back to when we first defined GPS. Random events such as solar flares can potentially cause great harm.
Inadvertent Natural or Manmade Jamming. A nearby device that creates spurious, destructive emissions can be a serious problem for GPS receivers. This class tends to be manageable by well-designed receivers.
Collateral Interference. An example is a person who wants to evade tracking but is inadvertently jamming nearby GNSS receivers in addition to his own local receiver.
Deliberate Jamming or Spoofing. This is perhaps the major concern for developers and users. I will discuss this further later.
There is a second major prerequisite: satellite geometry. The user who cannot see enough of the sky is called “sky-impaired.” There are two possible underlying problems:
The satellite constellation has “brown-out” because of failures or inadequate numbers; or
The user is operating in a mountainous or urban area with high, local shading angles.
Overcoming sky-impairment requires a denser constellation, or use of multiple GNSS.
Protect, Toughen, Augment
What can we — as developers, operators, and manufacturers — do to overcome the PNT availability challenges for our users? My solution is PTA. The good news is that quite a few of the actions I recommend are underway — in fact, many of GPS World’s readers are active participants.
I am going to examine these three PTA principles, expand on them a bit, and hopefully explain a few things that help focus on a broad solution.
Protect the System and the Signal
This can be organized into seven actions: three PreActions and four ReActions. PreActions are before there is serious interference, and ReActions obviously come after interference is occurring.
First, the PreActions.
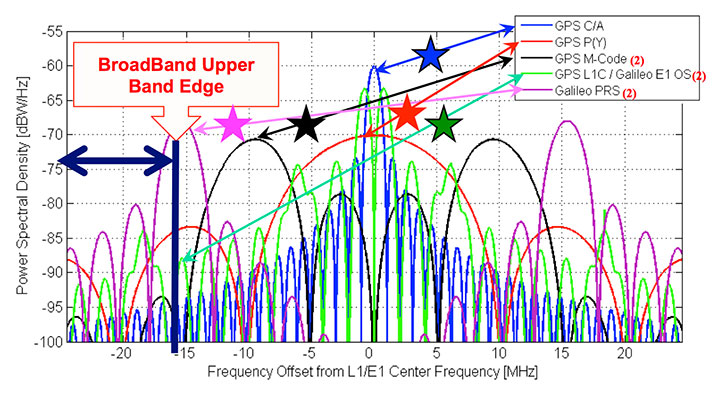
Protect the Spectrum. The chart in Figure 2 represents the frequency plan for the L1 band, and displays some of the sources of the 400 signals I referenced earlier. The blue star, GPS L1 C/ A, is the only fully operational and reliable signal in the world right now. The red star is the U.S. GPS military signal. You can see it has important power lobes close to the band edge. The black star is M-code, the new military signal of the United States.
Figure 2. Frequency plan for the L1 band.
The Galileo power curve, which is pale green, has very significant nodes close to the band edge. Of course, the Galileo PRS (the magenta star) is right on the band edge. The imperative for these wider bandwidths is that they produce sharper correlation edges and consequently produce greater measurement precision. This leads to greater accuracy, and greater usefulness and utility for many PNT users.
Reallocation of radio bands adjacent to GNSS poses a significant threat. The band edge of the proposed high-power communication signal (sometimes called broadband) appears as the black vertical line. It is obviously very close to the edges of many of the colored PNT signals. Tests conclusively demonstrated unacceptable levels of interference with L1 C/A.
Consider the proposed, high-powered terrestrial signal one quarter-mile from a GPS receiver. This produces a power ratio of 5 billion (broadband) to one (GPS). To visualize that power ratio, consider Niagara Falls, which produces about a billion watts. Compared to that, GPS power is a tablespoon of water dropped from five feet, once per second (about 0.2 watts). This is the power ratio that was almost authorized with 40,000 ground-based transmitters in the U.S. At a city block away, the effect is 10 times worse.
To quantify interference effects, some initial tests were run and measured broadband effects used for analysis. Cell-tower locations near Las Vegas, Nevada, approximated the broadband transmitter locations. The nearby airport, McCarran Field, has three RNAV (GPS) approaches. As expected, GPS users on the ground would be significantly jammed, but the effect on aircraft would be nine times worse than the impact on ground receivers. This is due to altitude (line of sight), geometry, and the sensitivity of aircraft receivers.
The 12 broadband transmitters around McCarran Field would jam all of the RNAV GPS approaches to all three runways. Signals of this type would effectively shut down or severely limit operations at the airport.
Signals in the GPS band will increase in the next decade as the newer GNSS become operational. The proposed, adjacent broadband is even more incompatible with these newer signals since they will be closer in frequency. Note that the whole approach was rejected, solely on the basis of L1/CA. It was not even tested against the other, more susceptible, modern signals. The worst would have been yet to come, had they been authorized to broadcast in the adjacent band.
Adjacent bands can continue to broadcast non-GNSS signals originating in space because the power levels will be comparable with the PNT spectrum. But we must be very vigilant to stop any high-power terrestrial signals from being allowed. They would become, effectively, authorized jammers. There should be no spectrum reallocation to ground transmitters until technology has been thoroughly demonstrated to solve any problems, (particularly for the high-precision users) and there is enough time to re-equip the users.
Europeans should have two other important frequency authorization concerns. First, there is a legal barrier within the United States to using Galileo signals. They have not been formally authorized. I think it is a bureaucratic glitch, but it is something we in the United States have to solve; we do want to use all GNSS signals. Stay tuned!
There is another concern. A group at the Electronic Communications Committee, European Commission, recommends allowing pseudolites in the L1 GNSS band. As an experienced user of pseudolites for aircraft landing and some other applications, I believe this is a very risky idea; pseudolites can be very useful, but frequencies should be found elsewhere to avoid unexpected interference.
Stiff Legal Penalties for Interference. The second PreAction is to enact stiff legal penalties for GPS jamming, both in terms of jail time and fines. The goal is to deter the ubiquitous $33 GPS jammer that one can buy on the Internet.
On the U.S. FCC website, the agency lists the penalties for having a GPS jammer. Forfeitures range up to $16,000, and they might even put you in jail. The Australians take a much stronger view: up to five years imprisonment or $850,000 in some cases. Some people are alarmed by these heavy penalties and call them brutal. However, they are not always imposed, and if jamming and spoofing is intentional, especially where the landing of airplanes is concerned and lives are at stake, I think a strong deterrent is warranted.
Stop Jammer Manufacturing, Sales. The third pre-action is to prevent proliferation by shutting down manufacturing and web sales of jammers. What is the status?
The FCC website states that manufacturers should comply with the law: stop marketing these devices in the United States and stop selling and shipping to addresses in the United States. The loophole is you apparently can manufacture these devices if you sell them outside the U.S. Now, I have a little difficulty with this. I have pointed this out to the DHS and others; hopefully, stronger action will be taken.
The FCC told me in an open meeting a few months ago that they were shutting down the websites where these devices are sold. But about three weeks ago, I went online and immediately found a website that sells nine different devices to jam GPS and cellphone devices. Indeed, there were jammers, all very affordable, for jamming just about everything. More recently, the FCC assessed a multi-million dollar penalty against such a jammer manufacturer. We will see if this actually happens. I hope they accelerate these efforts.
Now for the ReActions.
Detect Jamming. To stop jamming, the first step is to know when it is occurring. There are a variety of ways to do this. Some devices or concepts are already on the table: for example, a Chronos CTL3510 GPS Jammer Detector, an Exelis Signal Sentry Jammer Detector, and the J911 cell phone detection and reporting of jamming, an example from NavSys.
The idea behind the NavSys J911 is that all GPS-equipped smartphones have the capability to detect jamming. This does not pinpoint jammer location, but alerts authorities to the problem. Phone location can be reported to a central database for the next two actions.
Pinpoint Jammer Location. Techniques range from directional antennas to time-difference-of-arrival using Fast Fourier Transforms. The latter was demonstrated for the FAA at Stanford more than 10 years ago: location pinpointed within five meters. Cell towers could implement such techniques, since they have accurate time and could run correlations. There are already commercial GPS jamming locators: something called a JLOC (NaySys Jammer Locator). The British are using similar techniques for jammer detection on some of their freeways.
Eliminate Jammer. Having pinpointed the jammer, the next step is to physically eliminate it. What is the status? At Newark Airport there is an FAA, ground-based GPS augmentation system antenna right next to the turnpike. They are part of a blind landing system. In early 2010, there was an infamous jammer interfering with the FAA GPS receiver. It took three months to locate the offending truck driver and shut down the jammer. The good news is that, more recently, in the same general location, they located a similar moving jammer within 24 hours after the interference started. However, these are very special locations. Recent studies have suggested that interference sources are much more widespread. Note: Only certain enforcement personnel are authorized to seize the jammer and arrest its operator.
Prosecute. Having located the offender, the law should then be applied to prosecute. Leeway should be applied, commensurate with the circumstances. In this New Jersey case, the authorities say the perpetrator is liable for a forfeiture of $31,875.
Toughen Receivers
There are at least five well-known ways to toughen receivers, thereby increasing jam resistance:
Increased satellite signal spreading (such as L1C, L5) allowing greater processing gain;
Integration with inertial navigation components;
Digital beam-steering or null-steering antennas;
Increased satellite power such as L5 (a difficult and fairly expensive technique);
Local antenna shading, for example, the top of an airplane, which is shaded from the jammer.
These improvements cascade and are cumulative, but a remaining issue is to make such techniques more affordable.
To illustrate these anti-jamming techniques, consider the effective area of a 1-kW jammer located on the Capitol building in Washington, D.C. A basic high-quality GPS receiver, within a line-of-sight range of 20 miles, will stop providing PNT. Simply using the newest L1C spread-spectrum GPS signal reduces the jamming area by about two thirds, allowing operation to about 10 miles from the Capitol. Adding inertial aiding allows PNT to within three miles, and adding digital beam-forming antennas and using aircraft natural shading brings the effective radius to about 0.1 mile, about the size of the capital building.
The point is toughening the PNT receiver with the technologies mentioned is an extremely effective strategy. It would require over 60,000 jammers to cover the same area as the original non-toughened GNSS receiver.
Some techniques are very affordable today, while others, such as digital beam-forming antennas, remain too expensive for the ordinary user. In addition, there is a potential U.S. problem of export restrictions. Unfortunately, many of these existing restrictions have simply incentivized non-U.S. development of equivalent capabilities.
Augment
The last element of the PTA construct is to augment or substitute PNT sources. We are all aware of the coming revolution in multiple PNT sources from new GNSS. An all-GNSS receiver diversifies the frequencies and the signals, thereby reducing vulnerability to interference. It also improves availability for the sky-impaired user because of densification of satellites sources. Using satellites from multiple constellations can significantly improve availability, provided integrity requirements are met.
With these additional GNSS constellations, there are three major levels of cooperation:
Compatible: no mutal interference;
Interoperable: working to allow common time and geodesy system;
Interchangeable: using accurately calibrated biases and offset. Any four SVs will suffice.
The major issue again is probably integrity, because to ensure economic value, availability requires known integrity. As far as the U.S. FAA and ICAO are concerned, for precision aircraft operations the integrity value should be that the system be “out of spec” less than once in 1 billion times. To be productive they also would like zero minutes of unavailability. That may seem extreme, but commercial aviation and public safety demand it. Regarding integrity, some new GNSS are clearly making faster progress than others.
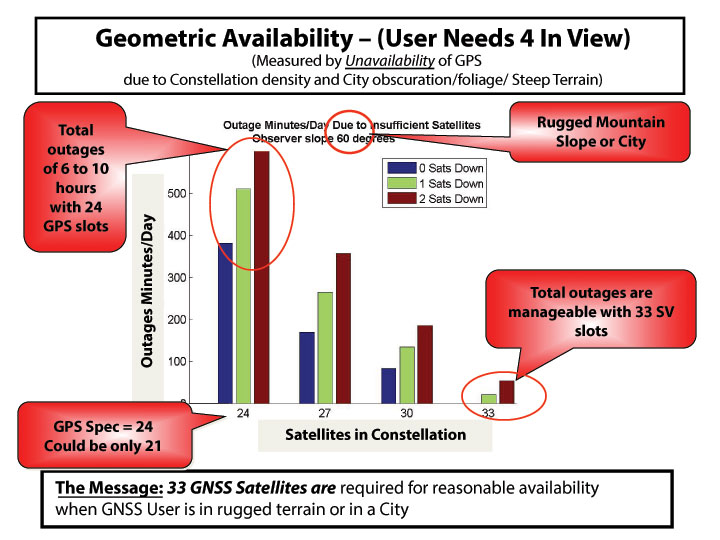
It is useful to further examine the densifying opportunity of additional GNSS. The chart in Figure 3shows how densification can impact the user. The number of satellites (SVs) available in the sky (assumed optimal distribution) is shown. The colors refer to whether 0, 1, or 2 SVs are out of commission for maintenance or repositioning (typical maximum is 1 for GPS). The measure of effectiveness is minutes of outage per day. Consider a shading angle of 60 degrees, representing a user near a rugged mountain slope area or a city. With the nominal 24 SV GPS constellation (the GPS specification is 24 despite the U.S. having 31 active SVs), the outages, due to geometry alone, are six to ten hours. Improvement with additional satellites is dramatic and quite non-linear. With 33 satellites (about a 37% increase in density) outages are zero minutes per day to 33 minutes if one satellite is out for maintenance (reduction by a factor of over 10!). Of course, SVs could be from different GNSS constellations if they are truly interchangeable and have the required integrity. The clear message is that about 33 SVs are needed to cover reasonably high elevation angles.
Figure 3. How densification of additional GNSS can affect the user.
Integrity Monitoring. Currently, the U.S. GPS control segment continuously monitors GPS satellites. If a fault is found, they set the satellite inoperative until the problem is resolved, which may take many minutes. This alarm time is not fast enough for precision aircraft landing and approach (the requirement is six seconds to alarm). For these rapid integrity alarms, the United States relies on the FAA’s WAAS, and Europe uses EGNOS to monitor the basic GPS L1 C/A signal. Soon, the EGNOS message will include Galileo integrity alerts. Unfortunately, the United States does not yet have a plan for reciprocal WAAS monitoring of Galileo signals. In fact, formal approval to even use these signals has not yet been granted by the U.S. FCC.
Self Integrity (RAIM). If an all-GNSS receiver has more than six satellites in view, the user can use the Receiver Autonomous Integrity Monitoring (RAIM) technique. This allows the user to cross-check each measurement against others to find erroneous satellites and guard against spoofing. Take the recent GLONASS situation. With a good RAIM PNT receiver, the user could quickly isolate the large errors from the combined set of GPS/GLONASS measurements. In fact, some deployed receivers did just that. If all GNSS are totally interchangeable, it will be enormously helpful to implement RAIM.
The recent, prolonged GLONASS outage saddened us all because it reduced the credibility of all GNSSs. We hope the Russians will be forthcoming in announcing what happened and the corrections that are being made; hopefully, it won’t happen again.
Fortunately, there is a third independent, real-time tracking network of 200+ sites, known as the Global Differential System (GDGPS). Although NASA administers GDGPS, local-country scientists maintain and operate individual sites in near real time. GPS is monitored down to centimeter precision.
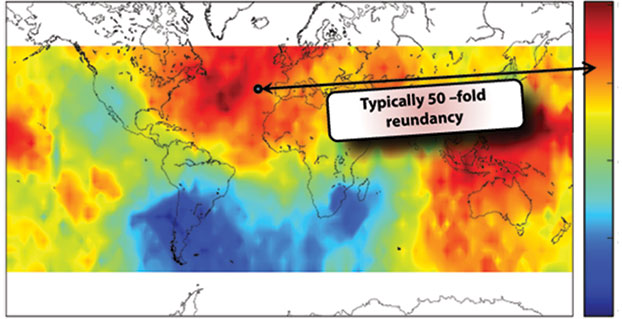
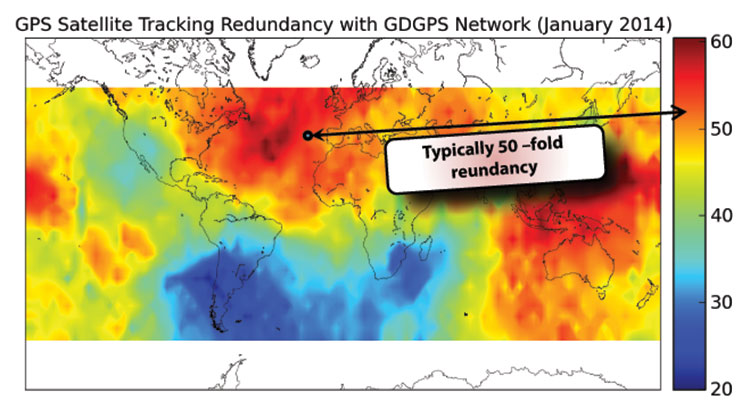
A central issue for GDGPS is whether the integrity monitor capability itself has integrity. Because of redundancy and independence, a form of inverse RAIM, hereby named System Autonomous Integrity Monitoring (SAIM), can be used. Figure 4 depicts the number of independent looks or ranging measurements to a single satellite over various points on the Earth. You can see in the dark areas the value is 60, and even in the relatively unmonitored areas around South America, the redundancy is 20. At a typical spot, perhaps off Spain, it depicts 50-fold redundancy. By cross-checking the dozens of GDGPS measurements for each satellite, a strong integrity cross-check can be created. The GDGPS plan is to also monitor Galileo as it becomes operational. Thus, GDGPS has excellent prospects to provide real-time integrity assessments for all users and all operational constellations. We need plans to connect all users to these potential integrity alarms.
Figure 4. The number of independent looks or ranging measurements to a single satellite over various points on the Earth.
There are three classes of ground-based augmentations:
Pseudolites. Ground augmentations could also include pseudolites broadcasting GPS-like signals for additional ranging. While somewhat helpful, this technique cannot cover large areas and can act as a strong interference source if the signal is in any GNSS frequency band. For this reason, in my opinion, pseudolites should never be authorized in GNSS frequencies.
Distance-Measuring Equipment. Modernized DME, planned as a GPS supplement by the U.S. FAA, is very valuable for the airborne users. Most ground users derive no benefit from DME because they do not have line of sight to the widely scattered transmitters. Ohio University’s Frank van Gras is working for the FAA on a DME plan should GPS not be available. It involves moving from the so-called legacy DME to the enhanced DME to ensure continuous aviation operations.
eLoran. eLoran, covering expandable local regions, uses a powerful signal at an entirely different frequency. It is two-dimensional, but in calibrated areas differential (eDLoran) is perhaps as accurate as 10 meters for harbor areas and similar purposes.
I chaired a study of eLoran for the FAA in 2006. Initially skeptical, the study members finally concluded (unanimously) that eLoran:
meets the needs of all identified critical applications: 10–20 meter navigation accuracy for harbor entrance; 0.3 mile required navigation performance (RNP 0.3); stratum 1 frequency precision and 50-ns time accuracy.
is a modern system: new infrastructure, solid state transmitters, state-of-the-art time and frequency equipment, uninterruptible power supplies; new operating concepts, time of transmission, all-in-view signals, message channel with differential corrections, integrity; new digital user equipment, processes eLoran and GPS signals interchangeably, compact H-field antennas eliminate p-static.
is affordable: Less than $143M to fully complete eLoran, avoid costs of decommissioning existing Loran-C infrastructure; operations and maintenance currently $37M/year, reduced with eLoran-enabled automation.
And our group concluded it was the most prudent and cost-effective general augmentation or backup to GPS.
The National PNT Advisory Board also unanimously recommended that we deploy eLoran. The departments of Transportation and Homeland Security supported it; then, after a change of administrations, in a budget crunch, it was defunded, and the dismantling of existing Loran C stations began. Congress now may be taking action, and the recent GLONASS outages should give an impetus to that.
Who Will Implement PTA?
To my knowledge, many elements are currently being pursued, some by GPS World readers. But I can identify no entity that has the authority, the knowledge, the breadth, and the resources to create a single, well-focused program. This reminds me of a fable from Aesop regarding ants. When no leadership emerges, the ants have to band together to solve the problem. Yes, I am suggesting that we are the ants and we all must contribute to the solution, as well as seeking governmental agencies to step up to the responsibility.
In that regard I have a “to do” list. We must:
Protect PNT.
Vigorously defend the spectrum.
Work with lawmakers to increase legal penalties for PNT interference.
Work with manufacturers and law enforcement to improve timeliness and accuracy of interference identification (crowd-sourcing, every cell phone a detector).
Field jammer location equipment.
Toughen PNT.
Develop industry (ICAO/RTCA/RTCM) standards for deep inertial integration and directional antennas.
Develop vector receivers (all GNSS).
Continue to implement ARAIM and inertial for integrity (+WAAS/EGNOS).
Encourage users to move to rugged receivers.
Augment PNT.
Expand integrity notifications to include GDGPS.
Develop RTCA standards for seamless DME and GPS/GNSS.
Implement eLoran and develop RTCM standards for seamless use.
Develop an international process for integrity certification of all GNSS (GLONASS, Galileo, and BeiDou).
In conclusion, the rumors of the death of GPS, in my opinion, are greatly exaggerated. Let’s not throw out the baby with the bath water. Instead let’s accelerate and expand PTA to Protect our band, and Toughen our receivers, and Augment GPS to ensure that PNT is available for all users now and in the future.
In the words of American poet Robert Frost,
The woods are lovely, dark and deep,
But we have promises to keep,
And miles to go before we sleep,
And miles to go before we sleep.
Thank you.
BRAD PARKINSON has been the Edward C. Wells Endowed Chair (emeritus) at Stanford University, where he is a recalled professor of aeronautics and astronautics.
He co-founded the well-known Stanford GPS Laboratory and led the development of many innovative uses of GPS, including blind aircraft landing, precision farm tractors, and the prototype of the FAA’s WAAS. He also directed development and was a co-PI for the successful test of Einstein known as Gravity Probe-B sponsored by NASA. He worked in various executive or board capacities at Trimble Navigation, Intermetrics, Rockwell International, and The Aerospace Corporation.
As an Air Force colonel, from 1972 to 1978, he was the chief architect and first director of the NAVSTAR GPS development program, retiring from the service after orbiting the first GPS satellites and proving GPS capabilities. He is a fellow of five professional societies and recipient of dozens of awards, including:sharing the 2003 Draper Prize with Ivan A. Getting for leading the development of the Global Positioning System.
Topcon Positioning Group’s technology and assistance will be used to create a large-scale landscape portrait planned for the National Mall.
Artist Jorge Rodríguez-Gerada has been commissioned by the Smithsonian’s National Portrait Gallery to create a six-acre portrait that will be a composite of several different faces. The project, titled “Out of Many, One,” will use high-precision GPS survey technology from Topcon to create the “facescape” between the World War II and Lincoln memorials along the south side of the Reflecting Pool. The portrait will be viewable from atop the Washington Monument.
The facescape will be built along the Reflecting Pool on the National Mall.
Topcon is providing equipment and personnel to help create the portrait. “Topcon GPS technology is my paintbrush,” Rodríguez-Gerada said. “This facescape would not be possible without the highly precise GPS and hybrid positioning equipment, as well as the technological expertise contributed by Topcon.”
“In a sense it is reverse surveying,” said Mark Contino, Topcon vice president of global marketing. “Surveyors normally measure the real world and scale it down to readable maps. In this case, the project starts in the artist’s mind and each contour of his drawing will be redrawn in the field using stakes guided by Topcon GPS technology and MAGNET Field software.”
The GPS positioning portion of the project will begin the week of September 15, and the final portrait is expected to be completed for unveiling in October.
Knowledge-base sections have been created for IGS Working Groups to maintain content for public access. The site administrators ask Working Group chairs to provide updated content to their sections.
Other sections include IGS Real-Time Service, IGS Presents (videos), IGS Multi-GNSS Experiment, news and events.
Because content has been extensively reorganized with this revision, links from many external websites will need to be updated, and the IGS apologizes for any inconvenience.
In Racetrack Playa in Death Valley, California, hundreds of rocks — some weighing as much as 700 pounds — seem to have been dragged across the ground, leaving synchronized trails that can stretch for hundreds of meters. Though many phenomena were speculated (hurricane-force winds, dust devils, slick algal films, thick sheets of ice), no one knew what caused the movement — until a team of researchers got to work using rocks tagged with GPS devices and a high-resolution weather station.
Rarely formed sheets of ice push rocks across a dry lake in Death Valley.
In Racetrack Playa in Death Valley, California, hundreds of rocks — some weighing as much as 700 pounds — seem to have been dragged across the ground, leaving synchronized trails that can stretch for hundreds of meters. Though many phenomena were speculated (hurricane-force winds, dust devils, slick algal films, thick sheets of ice), no one knew what caused the movement.
To solve the mystery, in 2011 a team of researchers led by paleobiologist Richard Norris, Scripps Institution of Oceanography, UC San Diego, began monitoring the rocks remotely. The research team fit 15 similar rocks with custom-built, motion-activated GPS units (the National Park Service disallowed use of native rocks) and installed a high-resolution weather station capable of measuring gusts to one-second intervals. Then — in what Ralph Lorenz of the Applied Physics Laboratory at the Johns Hopkins University suspected would be “the most boring experiment ever” — the researchers waited for something to happen.
In December 2013, Richard Norris and co-author and cousin Jim Norris discovered that the playa was covered with a pond of water three inches deep. Shortly after, the rocks began moving.
“Science sometimes has an element of luck,” Richard Norris said. “We expected to wait five or ten years without anything moving, but only two years into the project, we just happened to be there at the right time to see it happen in person.”
Their observations show that moving the rocks requires a rare combination of events. First, the playa fills with water, which must be deep enough to form floating ice during cold winter nights but shallow enough to expose the rocks. As nighttime temperatures plummet, the pond freezes to form thin sheets of “windowpane” ice, which must be thin enough to move freely but thick enough to maintain strength. On sunny days, the ice begins to melt and break up into large floating panels, which light winds drive across the playa, pushing rocks in front of them and leaving trails in the soft mud below the surface.
“On December 21, 2013, ice breakup happened just around noon, with popping and cracking sounds coming from all over the frozen pond surface,” said Richard Norris. “I said to Jim, ‘This is it!’”
The rocks moved under light winds of about 3-5 meters per second (10 miles per hour) and were driven by ice less than 3-5 millimeters (0.25 inches) thick, a measure too thin to grip large rocks and lift them off the playa, which several papers had proposed as a mechanism to reduce friction. Further, the rocks moved only a few inches per second (2-6 meters per minute), a speed that is almost imperceptible at a distance and without stationary reference points.
“It’s possible that tourists have actually seen this happening without realizing it,” said Jim Norris. “It is really tough to gauge that a rock is in motion if all the rocks around it are also moving.”
Individual rocks remained in motion for anywhere from a few seconds to 16 minutes. In one event, the researchers observed rocks three football fields apart began moving simultaneously and traveled over 60 meters (200 feet) before stopping. Rocks often moved multiple times before reaching their final resting place. The researchers also observed rock-less trails formed by grounding ice panels — features that the Park Service had previously suspected were the result of tourists stealing rocks.
“The last suspected movement was in 2006, and so rocks may move only about one millionth of the time,” Lorenz said. “There is also evidence that the frequency of rock movement, which seems to require cold nights to form ice, may have declined since the 1970s due to climate change.”
The team’s findings were published in the journal PLOS ONE on August 27.
Topcon Positioning Group has released two unmanned aerial systems (UAS) for mapping — the Sirius Pro and Sirius Basic. Both systems are designed to produce the most accurate solutions for the automated mapping of a wide range of sites — regardless of terrain — including construction sites, mines and quarries, and for use in land surveying, power line and pipeline inspection as well as precision agriculture field mapping.
The fixed-wing systems resulted from a partnership with MAVinci GmbH, a UAS development company with which Topcon recently entered into a worldwide distribution agreement.
“The Sirius Pro system is unique to the UAS marketplace. Instead of using traditional ground control points, Topcon combines RTK (real-time kinematic) GNSS solutions with precision timing technology to provide more accurate mapping results when compared to other products,” said Eduardo Falcon, executive vice president and general manager for the Topcon GeoPositioning Solutions Group.
“The system is easy to use and rugged — allowing operators to use a simple hand launch with precise automatic operation from takeoff to landing, and it can be flown safely in nearly all weather conditions,” Falcon said.
The Topcon Sirius Basic is an entry-level system offering many of the advantages of the Sirius Pro with options to upgrade. “The Sirius Basic shares the same hardware components of the Pro model, providing affordability with the same level of sturdiness and ease of operation,” said Falcon. “Additionally, when the need arises for the increased accuracy and productivity of the Pro system, a simple upgrade makes the transition practically effortless.”
Both systems also offer autopilot assisted manual control, automatic flight planning and safety features.
Galileo satellites 5 and 6 are safely under control, despite having been released on a lower and elliptical orbit instead of the expected circular orbit on August 22. Each satellite’s set of solar arrays is fully deployed and generating power, and operations continue smoothly.
The European ground teams deployed at the European Space Agency’s (ESA) control centre ESOC in Darmstadt, Germany, in cooperation with satellite manufacturer OHB, confirm that both satellites are in a safe state, correctly pointing to the sun, properly powered, and fully under control of the ESA-CNES integrated team.
Controllers are ready to proceed to the next stage of the launch and early operations phase activities.
In parallel, ESA teams are investigating the possibilities of exploiting the satellites to maximum advantage, despite their non-nominal injection orbits and within the limited propulsion capabilities. Different scenarios will then be assessed before decisions are taken for a recovery mission, according to ESA.
After the separation of the two Galileo satellites launched August 22, ongoing analysis of the data provided by the telemetry stations operated by the ESA and the French space agency CNES showed that the satellites were not in the expected orbit.
An independent inquiry commission was appointed August 25 by Arianespace, the European Space Agency (ESA) and the European Commission to investigate the anomaly.